
Detection of Cross-Line Successive Faults in Non-Effective Neutral Grounding Distribution Networks



Abstract
1. Introduction
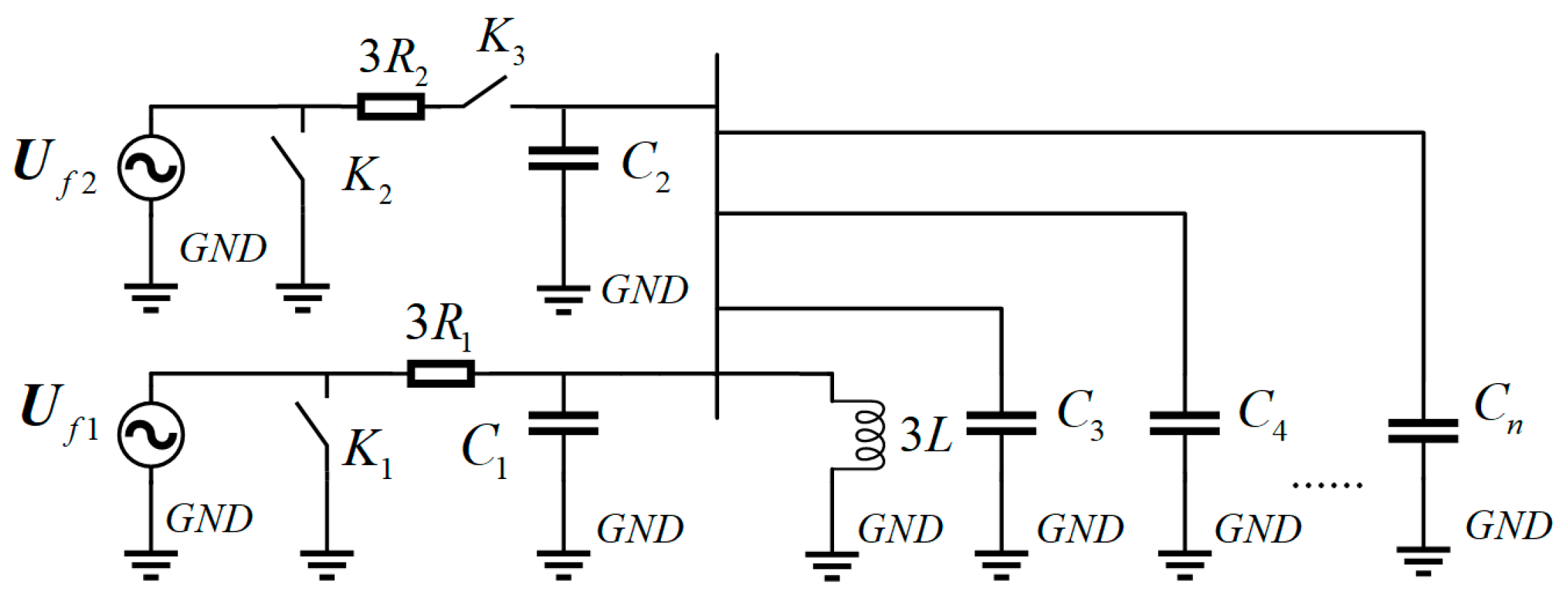
2. Modelling and Analysis of Successive Grounding Faults
3. Changes in Electrical Quantity Characteristics of Successive Grounding Faults
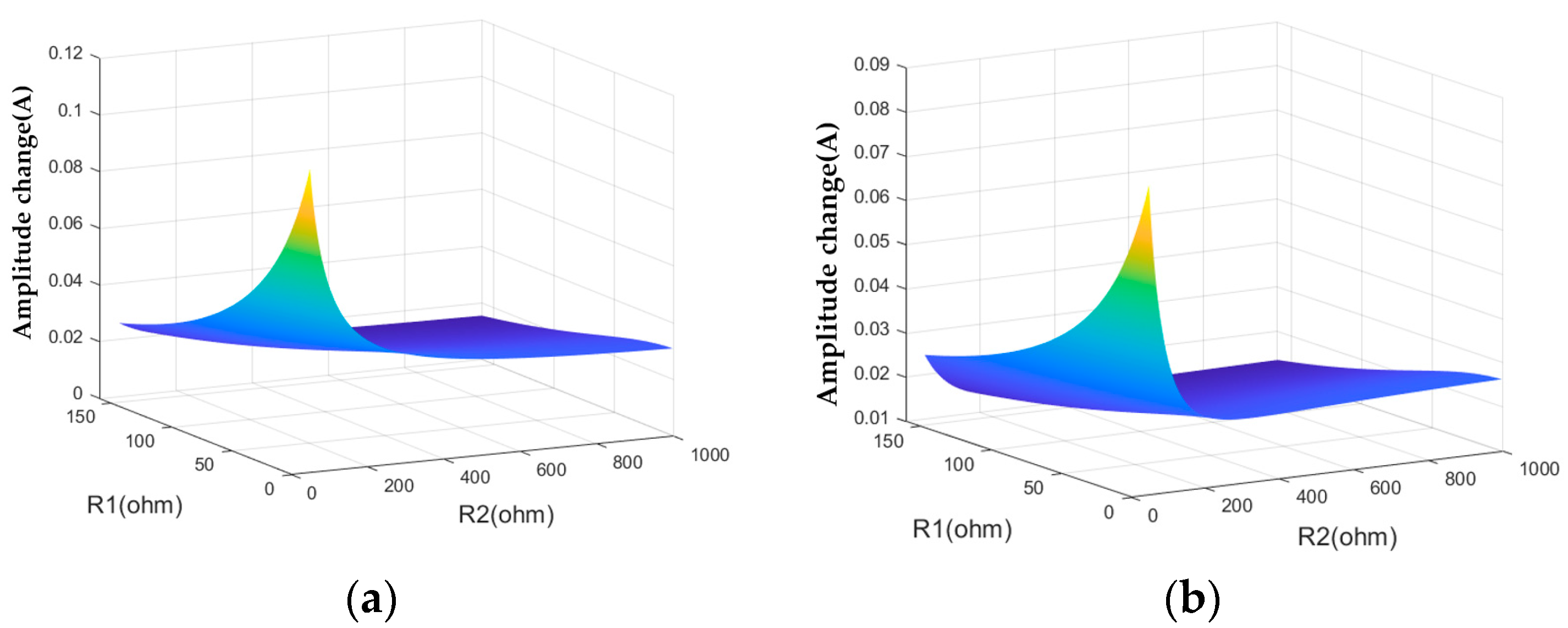
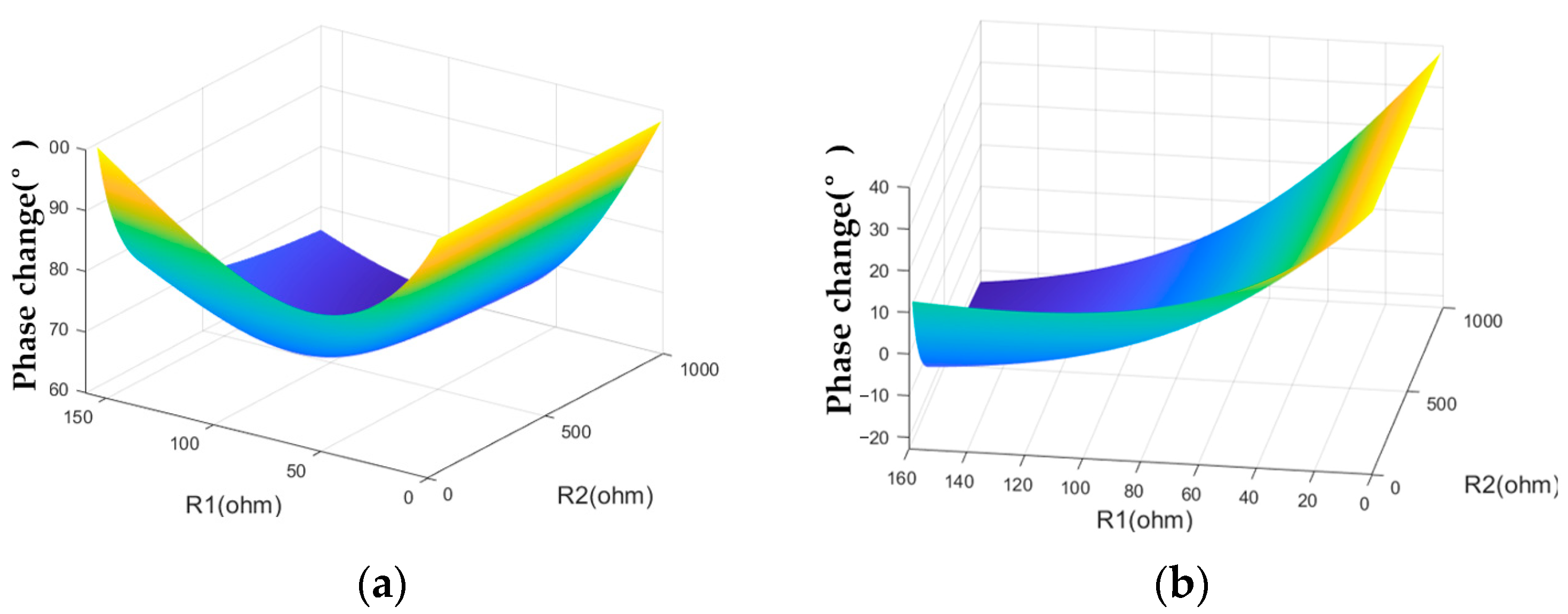
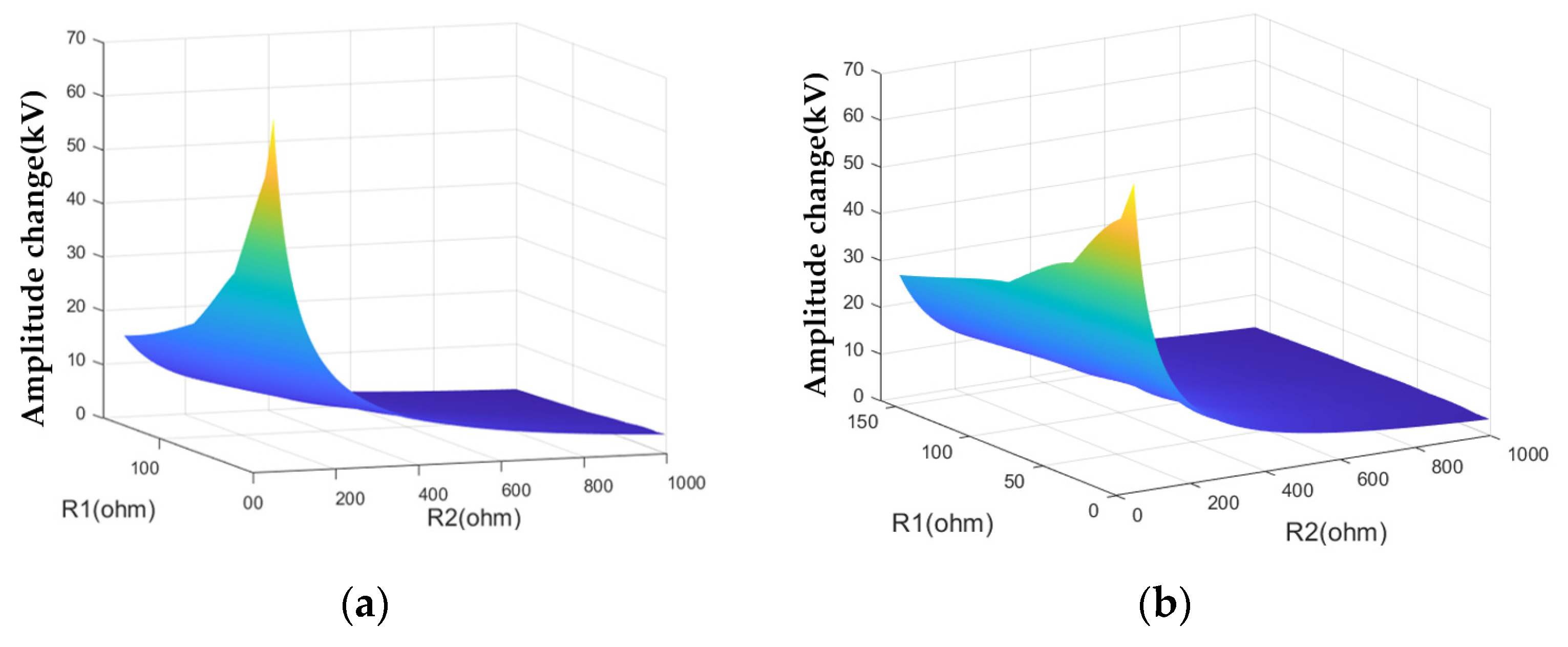
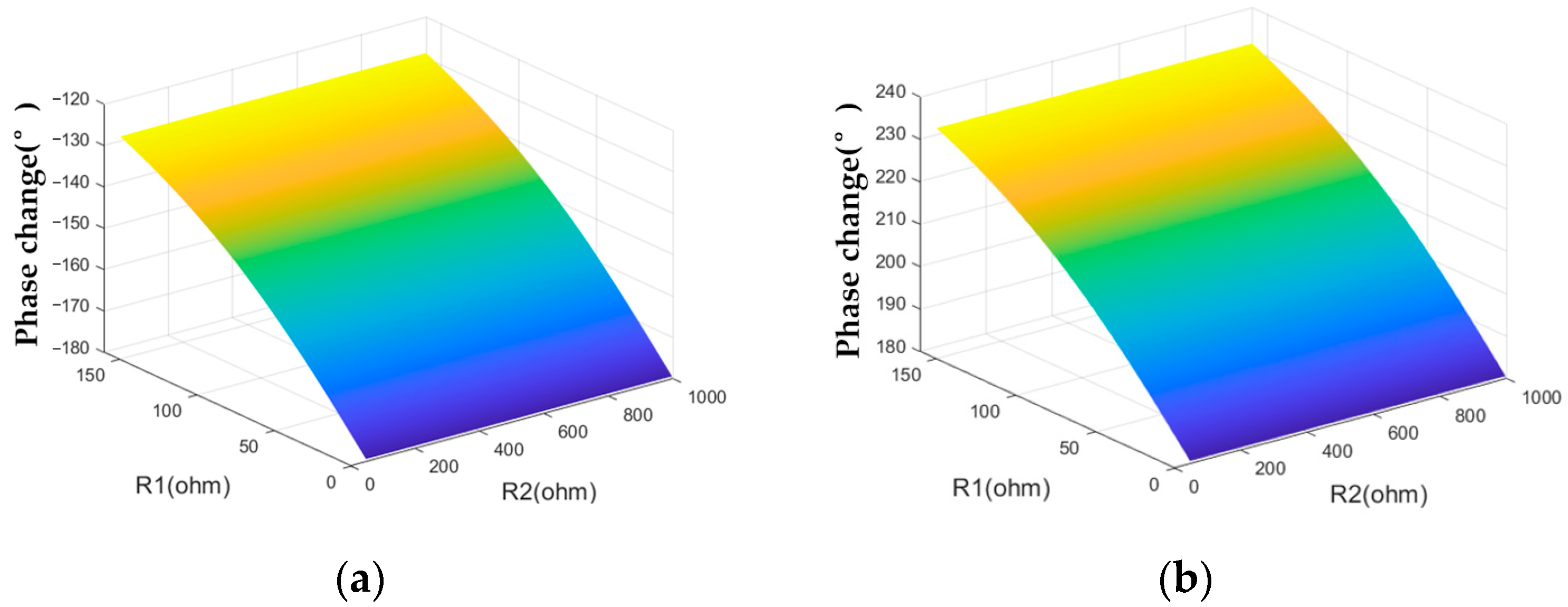
3.1. Fault Characteristic Analysis
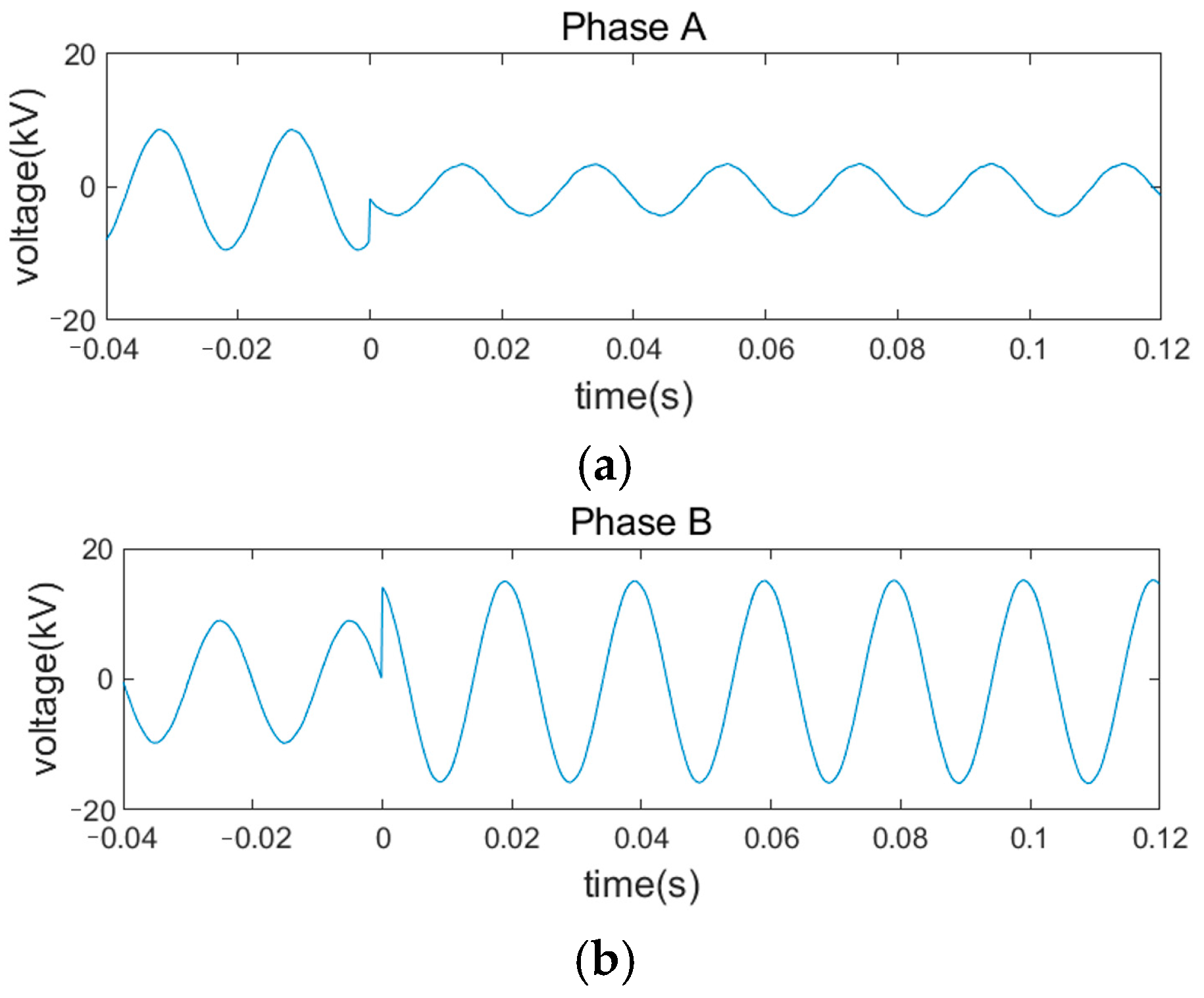
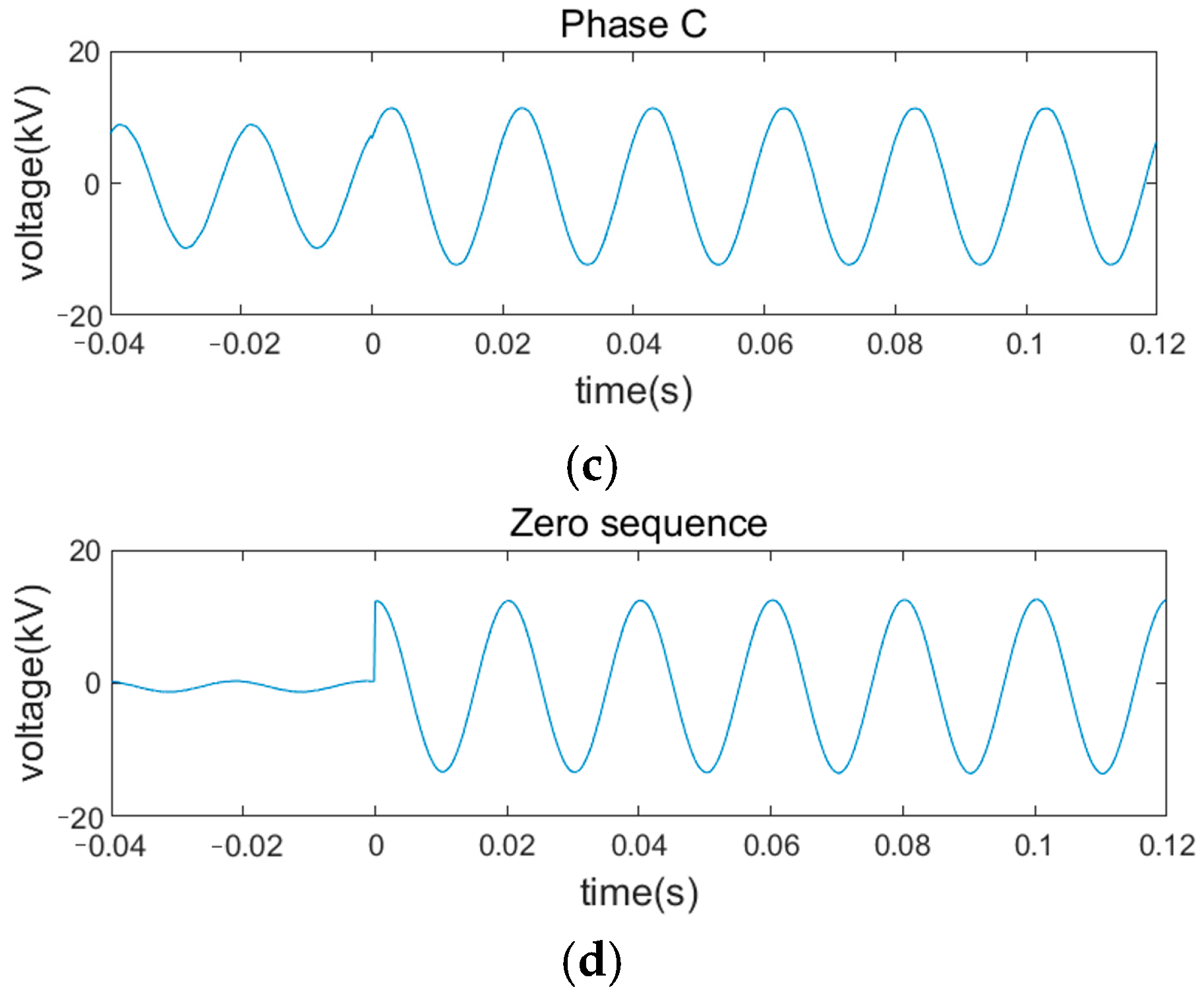
3.2. Simulation Analysis of Fault Characteristics
4. Detection Method for Cross Line Successive Grounding Faults
4.1. Detection Method
- (1)
- (2)
- Real-time monitoring of zero sequence current and zero sequence voltage of each line, denoted as I0j(t) and U0(t), with the single-phase grounding time denoted as t0. If at a certain time t1, the zero sequence current of the first faulty line satisfies |I0f(t0) − I0f(t1)| > k, then proceed to step (3), otherwise return to step (1).
- (3)
- Determine whether it satisfies the condition of φ(I0f(t0)) φ(I0f(t1)) > g. If so, proceed to step (4), otherwise, proceed to step (5).
- (4)
- Continue to inspect the remaining lines. If a certain line satisfies |ΔBx| > b1 and p1 < Δφx < q1, it is considered as fault line two, and its fault phase is the phase that lags 120° behind the first fault phase. Then, proceed to step (6).
- (5)
- Continue to inspect the remaining lines. If a certain line satisfies |ΔBx| > b2 and p2 < Δφx < q2, then the line is fault line two, and its fault phase is the phase that leads the first fault phase by 120°. Enter step (6).
- (6)
- Exit trip or alarm, end.
4.2. Interference Analysis
5. Algorithm Effectiveness Verification
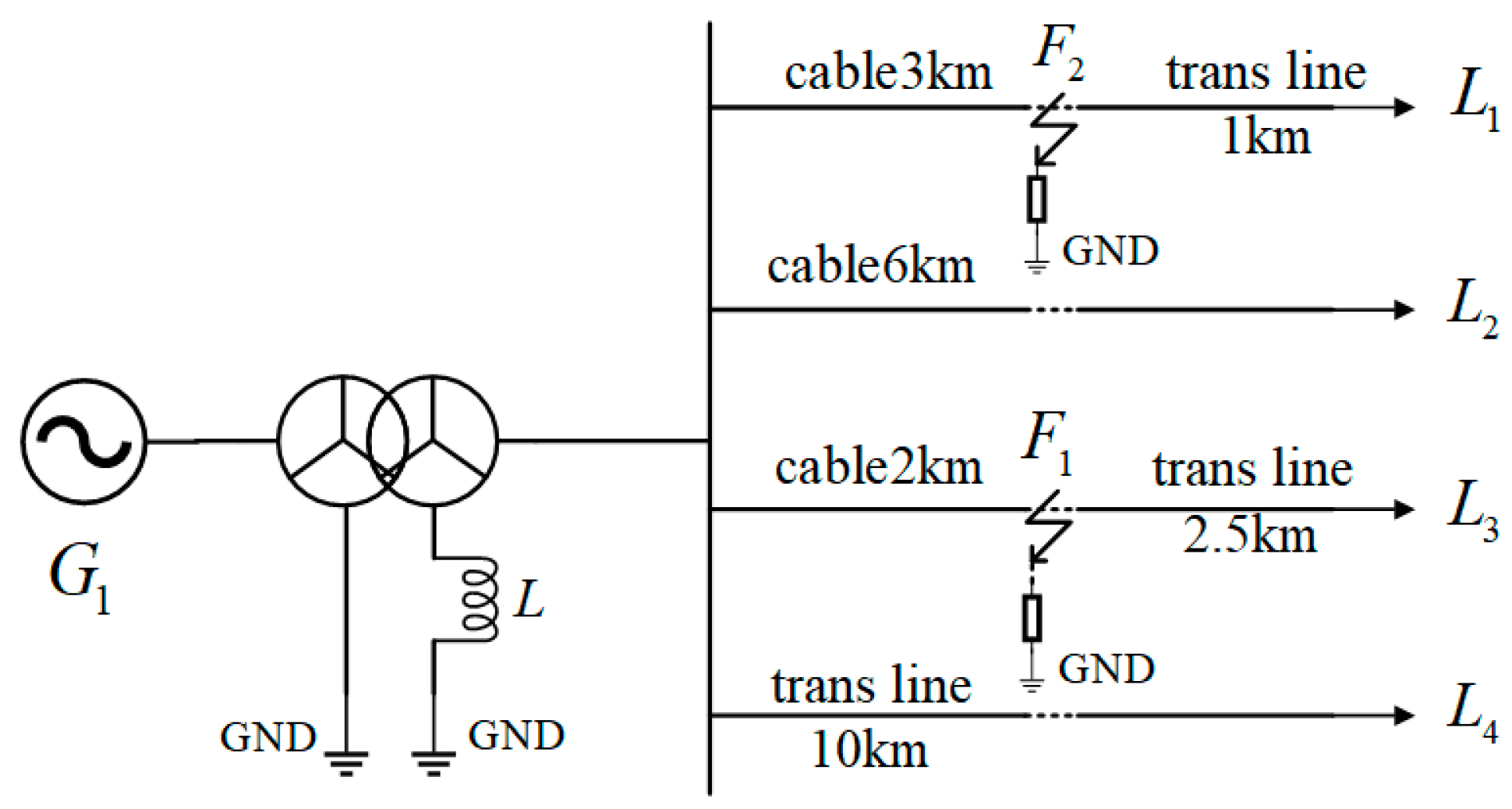
5.1. Testing Platform
5.2. Simulation Verification
5.3. Field Data Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- (1)
- When fault additional source one acts alone, additional source two in a short circuit state. The zero sequence voltage is U0_1, the current on the arc suppression coil is I3L_1, and the zero sequence current at the line outlet is Ij0_1.
- (2)
- When fault additional source two acts alone, additional source one is in a short circuit state. The zero sequence voltage is U0_2, the current on the arc suppression coil is I3L_2, and the zero sequence current at the line outlet is Ij0_2.
- (3)
- The expression for the steady-state zero sequence voltage and zero sequence current of the secondary fault is obtained by adding the calculation results of the fault additional source one Uf1 acting alone and the fault additional source two Uf2 acting alone.
References
- Xu, B.; Li, T.; Xue, Y. Relaying Protection and Automation of Distribution Networks; China Electric Power Press: Beijing, China, 2017. [Google Scholar]
- Liu, J.; Zhang, X.; Zhang, X. Treatment of a Single-phase Grounding Fault in a Small Current Grounding System to Prevent Fire in a Cable Trench. Power Syst. Prot. Control 2023, 51, 21–29. [Google Scholar]
- Xue, Y.; Xie, Y.; Wen, F. A Review on Cascading Failures in Power System. Autom. Electr. Power Syst. 2013, 37, 1–9+40. [Google Scholar]
- Wu, Z.; Cai, Y.; Zhang, J. Fault Analysis on Successive Fault of Multi-feeders Connected to the Same Bus in Resonant Grounding System. High Volt. Eng. 2017, 43, 2402–2409. [Google Scholar]
- Wu, F.; Gu, Z. Analysis of the Cross-country Grounded Fault in the Low Current Grounded System. J. Shanghai Univ. Electr. Power 2020, 36, 524–528. [Google Scholar]
- Ouyang, J.; Yu, X.; Zhou, Y. A Fault Line Selection Method for Two-Point Successive Grounding of Power Distribution Line. South. Power Syst. Technol. 2020, 14, 81–89. [Google Scholar]
- Qi, Z.; Xue, Y.; Liu, J. Transient Characteristics of Cross-line Successive Grounding Faults and Applicability of Transient Line Selection Methods. Autom. Electr. Power Syst. 2023, 47, 156–165. [Google Scholar]
- Zhang, Z.; Xue, Y.; Dong, L. Power Frequency Characteristics and Line Selection under Two Point Grounding Faults Occurring in Same Phase in Isolated Neutral System. Proc. CUS-EPSA 2022, 34, 9–16. [Google Scholar]
- Lin, Z.; Liu, X.; Wang, Y. Centralized Protection for Low-resistance Grounding System Under Multi-point Grounding Fault. Proc. CSU-EPSA 2019, 31, 67–73. [Google Scholar]
- Wang, X.; Zhang, F.; Gao, J. Cross-line same-phase successive fault detection method of flexible grounding system based on double vertical and horizontal criteria. Power Syst. Technol. 2025, 1–10. [Google Scholar]
- Qi, Z.; Tian, J.; Xue, Y. Analysis of Power Frequency Electrical Quantity and Line Selection Applicability for Two-Point Grounding Faults Occurring on Different Phases in Isolated Neutral System. Trans. China Electrotech. Soc. 2023, 38, 3539–3551. [Google Scholar]
- Xue, Y.; Qi, Z.; Cai, Z. Detection of Cross-line Different-phase Two-point Successive Grounding Fault Based on Change of Zero-sequence Admittance. Autom. Electr. Power Syst. 2023, 47, 174–183. [Google Scholar]
- Wang, B.; Cui, X. Nonlinear Modeling and Analytical Analysis of Arc High Resistance Grounding Fault in Distribution Network with Neutral Grounding via Arc Suppression Coil. Proc. CSEE 2021, 41, 3864–3873. [Google Scholar]
- Jiang, B.; Dong, X.; Shi, S. A Method of Single Phase to Ground Fault Feeder Selection Based on Single Phase Current Traveling Wave for Distribution Lines. Proc. CSEE 2014, 34, 6216–6227. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Type | R1 (Ω/km) | C1 (μF/km) | L1 (mH/km) | R0 (Ω/km) | C0 (μF/km) | L0 (mH/km) |
|---|---|---|---|---|---|---|
| Overhead line | 0.1700 | 0.0097 | 1.2096 | 0.23 | 0.006 | 5.4749 |
| Cable | 0.2700 | 0.3390 | 0.2550 | 0.27 | 0.280 | 1.0190 |
| ΔI10 | Characteristic | Sequential Grounding | Reverse Sequential Grounding |
|---|---|---|---|
| Amplitude variation | As R1 increases | Reduce | Reduce |
| As R2 increases | Reduce | Reduce | |
| Maximum value | 86.6 A | 90.4 A | |
| Minimum value | 1.0 A | 2.2 A | |
| Phase change | As R1 increases | Reduce first and then increase | Reduce |
| As R2 increases | Reduce | Reduce | |
| Maximum value | 98.9° | 38.3° | |
| Minimum value | 61.2° | −22.8° |
| Fault Type | Resistance | Zero Sequence Voltage/Line Number | Phasor Variation (kV∠°/A∠°) | |ΔB| (kV) | Δφ(°) | Second Fault Line |
|---|---|---|---|---|---|---|
| Sequential grounding fault | R1 = 50 Ω R2 = 500 Ω | Zero sequence voltage | 1.21∠87.83 | - | - | Line 1 |
| 1 | 8.64∠–94.34 | 33.53 | −182.17 | |||
| 2 | 0.61∠173.41 | 1.61 | 85.58 | |||
| 3 | 8.61∠95.12 | - | - | |||
| 4 | 0.03∠169.54 | 1.80 | 81.71 | |||
| R1 = 50 Ω R2 = 900 Ω | Zero sequence voltage | 0.71∠88.04 | - | - | Line 1 | |
| 1 | 5.00∠–91.55 | 19.64 | −179.59 | |||
| 2 | 0.47∠194.67 | 1.29 | 106.63 | |||
| 3 | 4.99∠93.36 | - | - | |||
| 4 | 0.02∠189.94 | 1.35 | 101.90 | |||
| Reverse sequential grounding fault | R1 = 50 Ω R2 = 500 Ω | Zero sequence voltage | 1.28∠27.62 | - | - | Line 1 |
| 1 | 8.61∠206.86 | 33.57 | 179.24 | |||
| 2 | 0.59∠143.42 | 2.27 | 115.8 | |||
| 3 | 8.47∠29.79 | - | - | |||
| 4 | 0.04∠135.33 | 2.90 | 107.71 | |||
| R1 = 50 Ω R2 = 900 Ω | Zero sequence voltage | 0.69∠34.27 | - | - | Line 1 | |
| 1 | 4.97∠208.89 | 19.19 | 174.62 | |||
| 2 | 0.37∠130.87 | 1.04 | 96.60 | |||
| 3 | 5.11∠27.39 | - | - | |||
| 4 | 0.03∠116.05 | 1.52 | 81.78 |
| Fault Type | Fault Setting | Zero Sequence Voltage/Line Number | Phasor Variation (kV∠°/A∠°) | |ΔB| (kV) | Δφ(°) | Second Fault Line |
|---|---|---|---|---|---|---|
| Unstable single-phase grounding fault | R1 = 50 Ω R1n = 80 Ω | Zero sequence voltage | 0.01∠−151.2 | - | - | Do not accidentally start |
| 1 | 0.01∠120.6 | - | - | |||
| 2 | 0.01∠120.6 | - | - | |||
| 3 | 0.02∠−59.4 | - | - | |||
| 4 | 0.01∠120.6 | - | - | |||
| R1 = 50 Ω R1n = 200 Ω | Zero sequence voltage | 0.76∠113.54 | - | - | Do not accidentally start | |
| 1 | 0.27∠27.63 | - | - | |||
| 2 | 0.26∠27.63 | - | - | |||
| 3 | 0.20∠13.48 | - | - | |||
| 4 | 0.26∠27.63 | - | - | |||
| Successive fault with unstable grounding for the first time | Sequential grounding R1 = 50 Ω R1n = 200 Ω R2 = 500 Ω | Zero sequence voltage | 4.17∠60.27 | - | - | Line 1 |
| 1 | 6.38∠247.35 | 28.04 | 187.08 | |||
| 2 | 2.40∠154.75 | 5.94 | 94.48 | |||
| 3 | 6.46∠55.21 | - | - | |||
| 4 | 0.04∠155.34 | 4.62 | 95.07 | |||
| Reverse sequential grounding R1 = 50 Ω R1n = 200 Ω R2 = 500 Ω | Zero sequence voltage | 3.75∠1.76 | - | - | Line 1 | |
| 1 | 6.79∠−174.82 | 29.18 | −176.58 | |||
| 2 | 1.92∠95.32 | 5.38 | 93.56 | |||
| 3 | 7.07∠−9.48 | - | - | |||
| 4 | 0.03∠98.69 | 5.02 | 96.93 |
| Zero Sequence Capacitance Deviation of the Line | Zero Sequence Voltage/Line Number | Phasor Variation (kV∠°/A∠°) | |ΔB| (kV) | Δφ(°) | Second Fault Line |
|---|---|---|---|---|---|
| Line 1 +10% | Zero sequence voltage | 1.22∠90.68 | - | - | Line 1 |
| 1 | 8.64∠−87.90 | 33.58 | −178.58 | ||
| 2 | 0.61∠188.28 | 1.56 | 82.40 | ||
| 3 | 8.70∠87.63 | - | - | ||
| 4 | 0.04∠197.08 | 1.31 | 106.4 | ||
| Line 1 +30% | Zero sequence voltage | 1.41∠80.24 | - | - | Line 1 |
| 1 | 8.71∠−94.31 | 34.03 | −185.45 | ||
| 2 | 0.61∠188.28 | 1.52 | 108.04 | ||
| 3 | 8.95∠86.22 | - | - | ||
| 4 | 0.04∠197.08 | 1.31 | 116.84 | ||
| Line 2 +10% | Zero sequence voltage | 1.27∠87.34 | - | - | Line 1 |
| 1 | 8.46∠−89.77 | 32.96 | −177.11 | ||
| 2 | 0.33∠159.75 | 1.56 | 72.41 | ||
| 3 | 8.81∠87.74 | - | - | ||
| 4 | 0.04∠188.94 | 1.26 | 101.60 | ||
| Line 2 +30% | Zero sequence voltage | 1.59∠75.03 | - | - | Line 1 |
| 1 | 8.49∠−89.77 | 33.34 | −164.80 | ||
| 2 | 0.79∠170.32 | 3.08 | 95.29 | ||
| 3 | 9.18∠86.46 | - | - | ||
| 4 | 0.05∠184.55 | 1.34 | 109.52 | ||
| Line 3 +10% | Zero sequence voltage | 1.21∠91.57 | - | - | Line 1 |
| 1 | 8.47∠−89.79 | 32.94 | −181.36 | ||
| 2 | 0.61∠188.28 | 1.57 | 96.71 | ||
| 3 | 8.72∠87.64 | - | - | ||
| 4 | 0.04∠187.39 | 1.26 | 95.82 | ||
| Line 3 +30% | Zero sequence voltage | 1.41∠80.24 | - | - | Line 1 |
| 1 | 8.46∠−89.77 | 33.08 | −170.01 | ||
| 2 | 0.67∠179.4 | 1.74 | 99.16 | ||
| 3 | 8.86∠86.16 | - | - | ||
| 4 | 0.04∠187.39 | 1.26 | 107.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Wang, B.; Xu, M.; Xie, R.; Li, Z.; Dong, X. Detection of Cross-Line Successive Faults in Non-Effective Neutral Grounding Distribution Networks. Energies 2025, 18, 2269. https://doi.org/10.3390/en18092269
Jin Y, Wang B, Xu M, Xie R, Li Z, Dong X. Detection of Cross-Line Successive Faults in Non-Effective Neutral Grounding Distribution Networks. Energies. 2025; 18(9):2269. https://doi.org/10.3390/en18092269
Chicago/Turabian StyleJin, Yuxuan, Bin Wang, Mingming Xu, Ruirui Xie, Zhi Li, and Xuan Dong. 2025. "Detection of Cross-Line Successive Faults in Non-Effective Neutral Grounding Distribution Networks" Energies 18, no. 9: 2269. https://doi.org/10.3390/en18092269
APA StyleJin, Y., Wang, B., Xu, M., Xie, R., Li, Z., & Dong, X. (2025). Detection of Cross-Line Successive Faults in Non-Effective Neutral Grounding Distribution Networks. Energies, 18(9), 2269. https://doi.org/10.3390/en18092269