
Dynamic Optical Wireless Power Transmission Infrastructure Configuration for EVs


Abstract
1. Introduction
2. Challenges of Electric Vehicles
2.1. Issuues of Battery of EV
2.2. Issuues of Dynamic Power Transmission
2.3. Dynamic Power Transmission by OWPT
3. Simulator for Infrastructure of D-OWPT-EV
3.1. Preparation of Real EV Model for Simulator
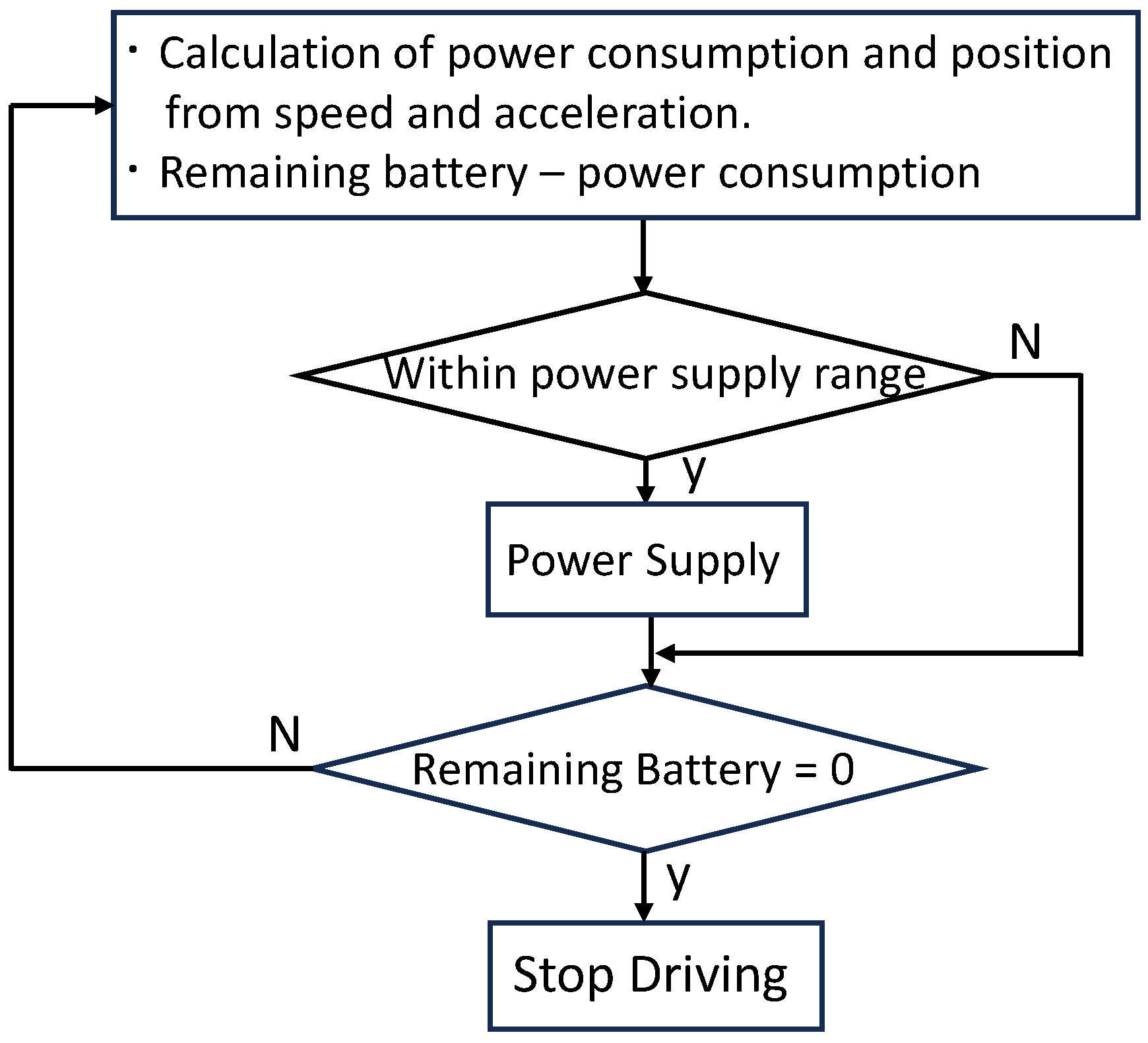
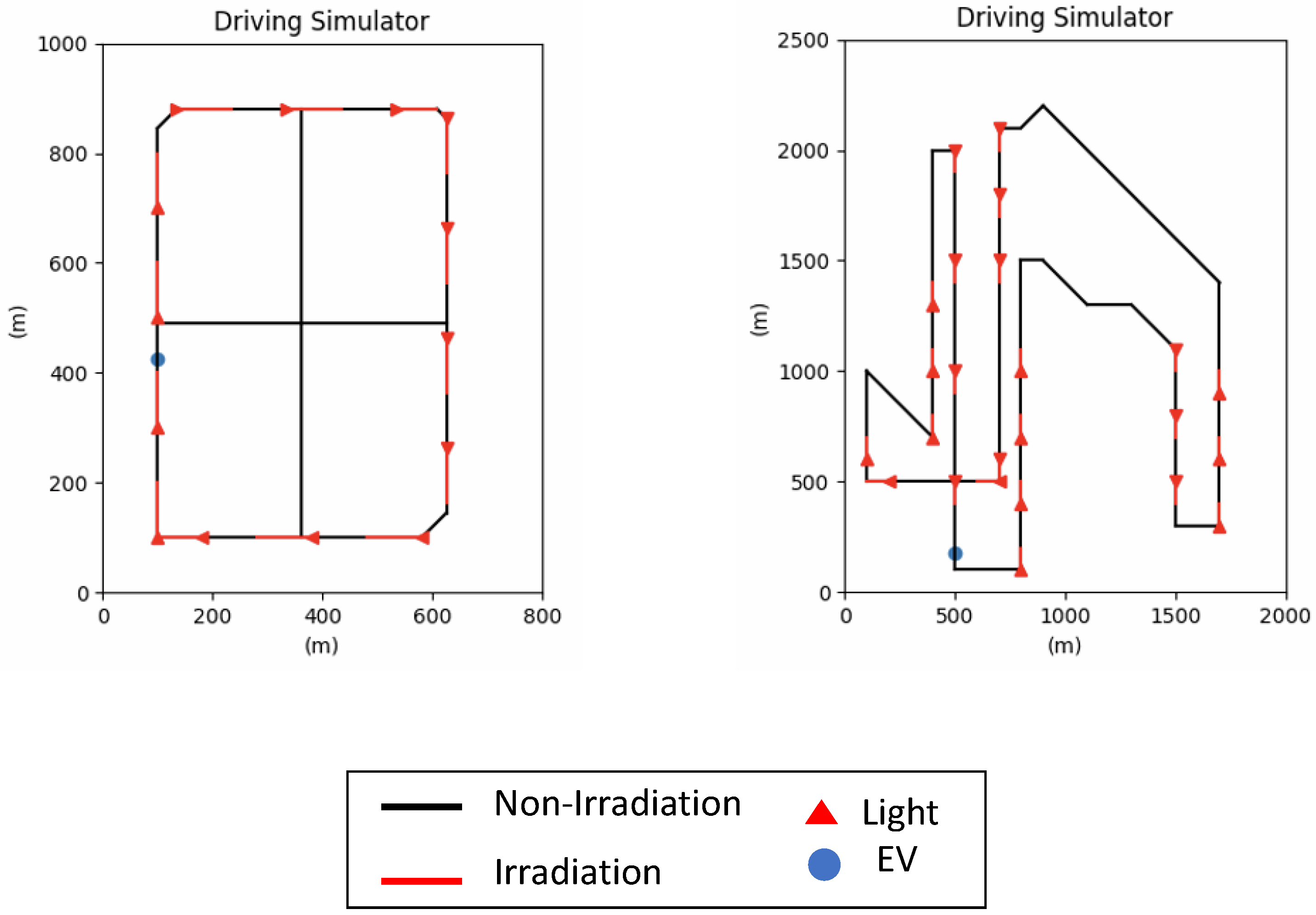
3.2. Construction of Infrastructure Simulator
4. Simulation Result
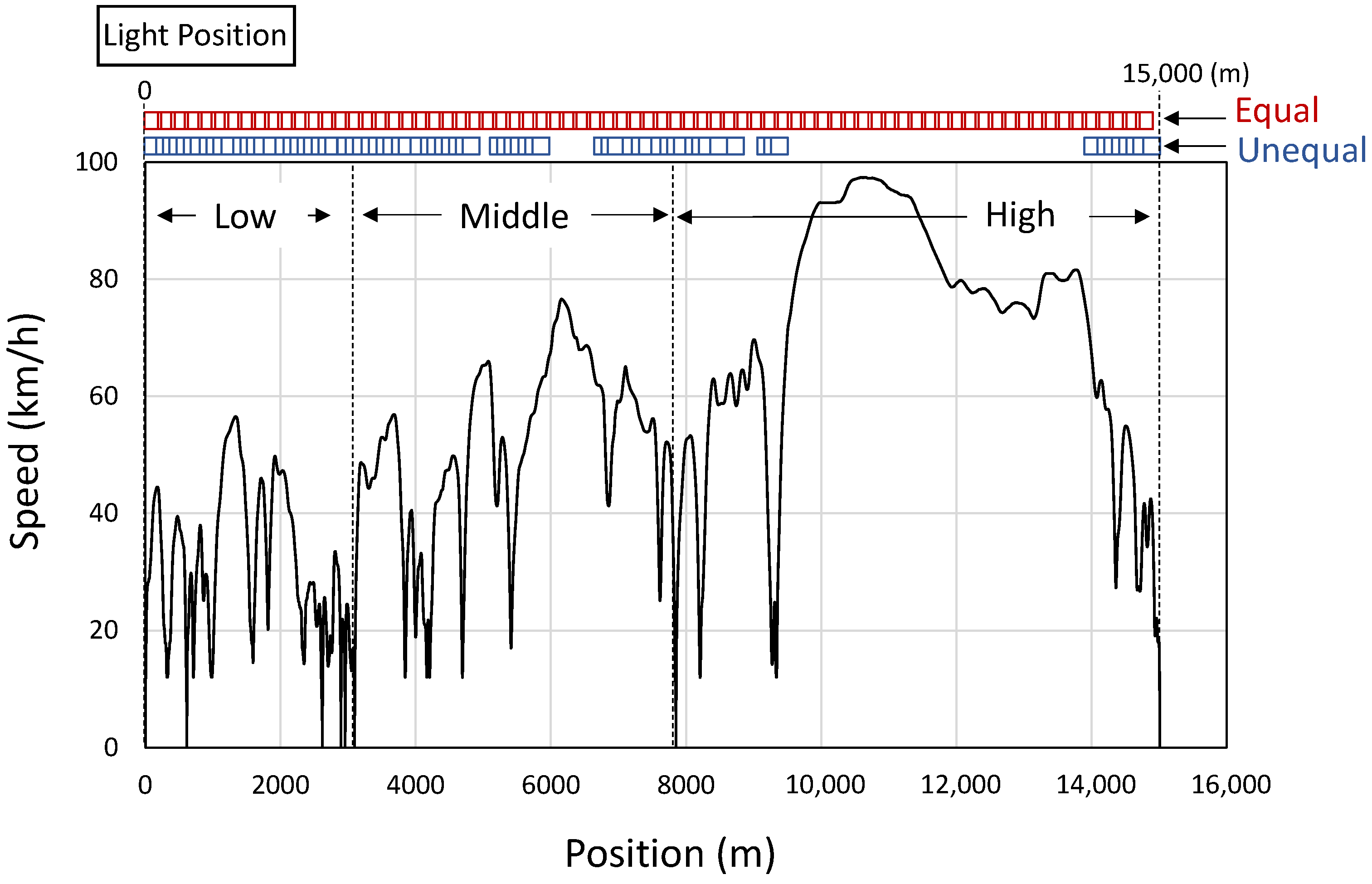
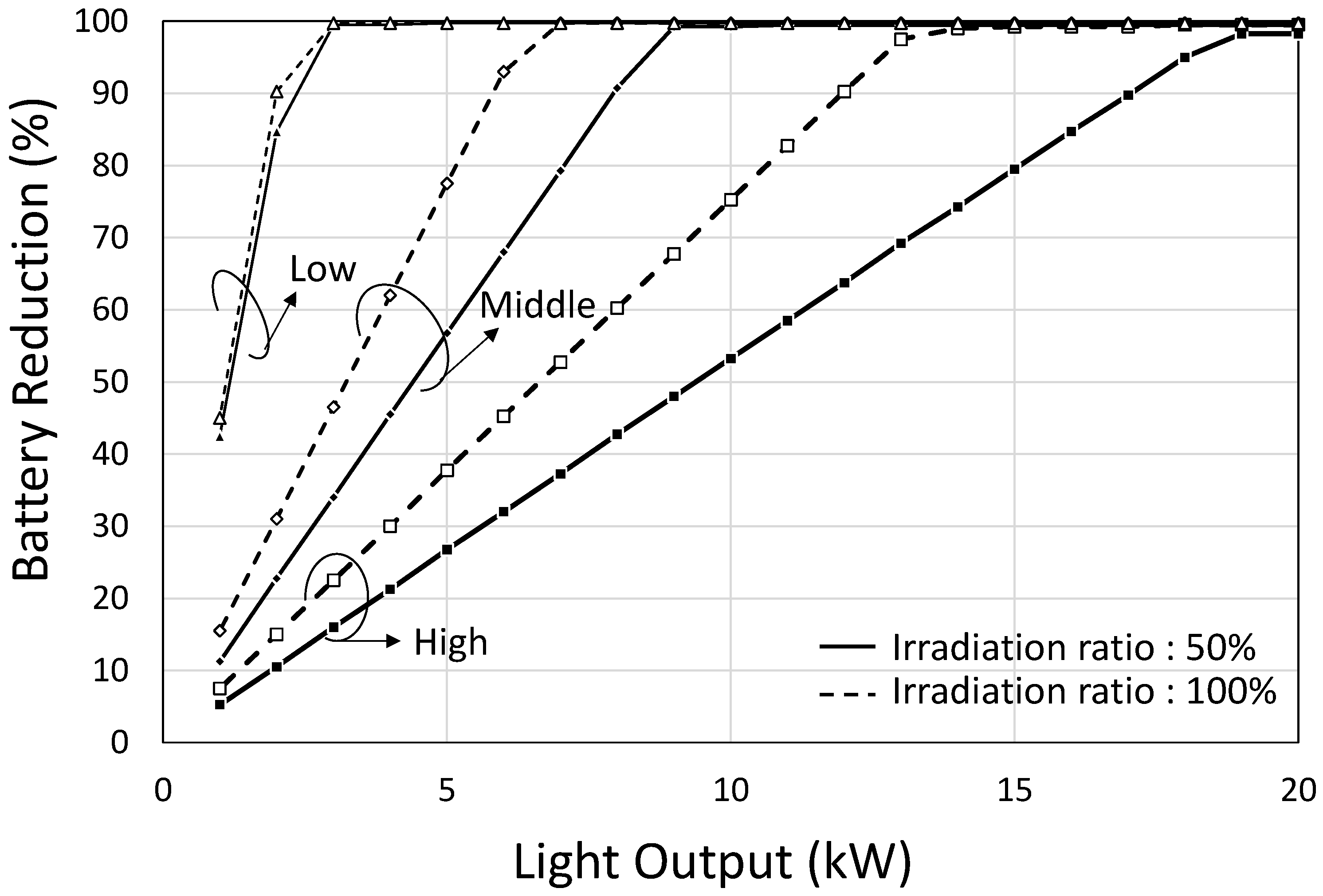
4.1. Effective Light Source Position
4.2. Continuous Driving Condition
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EV(s) | Electric vehicle(s) |
| OWPT | Optical wireless power transmission |
| WPT | Wireless power transmission |
| D-OWPT | Dynamic optical wireless power transmission |
| DC | Direct current, continuous current |
| ICE | Internal combustion engine |
| LED | Light emitting diode |
| WLTC | Worldwide harmonized light duty driving test cycle |
Symbols
| Time of driving | |
| Air resistance of EV during driving at time t | |
| Frictional resistance of EV during driving at time t | |
| Power consumption of EV during driving at time t | |
| Speed of EV at time t | |
| Acceleration of EV at time t | |
| Weight of EV | |
| Gravitational acceleration | |
| Proportional constants for the air resistance and assumed as a constant | |
| Proportional constants for the frictional resistance and assumed to be constant | |
| Regeneration efficiency during deceleration | |
| Estimated speed after deceleration at time t | |
| Power consumption during deceleration |
References
- Costa, V.B.F.; Bitencourt, L.; Dias, B.H.; Soares, T.; Andrade, J.V.B.; Bonatto, B.D. Life cycle assessment comparison of electric and internal combustion vehicles: A review on the main challenges and opportunities. Renew. Sustain. Energy Rev. 2025, 208, 114988. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, G.; Huan, Z.; Zhang, Y.; Yuan, G.; Li, Q.; Ding, G.; Lv, Z.; Ni, W.; Shao, Y.; et al. Wireless laser power transmission: Recent progress and future challenges. Space Sol. Power Wirel. Transm. 2024, 1, 17–26. [Google Scholar] [CrossRef]
- Miyamoto, T. Optical wireless power transmission using VCSELs. In Proceedings of the Semiconductor Lasers and Laser Dynamics VIII, Strasbourg, France, 22–26 April 2018; p. 1068204. [Google Scholar]
- He, T.; Yang, S.-H.; Zhang, H.-Y.; Zhao, C.-M.; Zhang, Y.-C.; Xu, P.; Ángel, M.M. High-power high-efficiency laser power transmission at 100 m using optimized multi-cell GaAs converter. Chin. Phys. Lett. 2014, 31, 104203. [Google Scholar] [CrossRef]
- Jin, K.; Zhou, W. Wireless laser power transmission: A review of recent progress. IEEE Trans. Power Electron. 2018, 34, 3842–3859. [Google Scholar] [CrossRef]
- Kawakami, M.; Suda, Y.; Miyamoto, T. Effective placement methods of light source infrastructure for dynamic EV charging using optical wireless power transmission. In Proceedings of the 6th Optical Wireless and Fiber Power Transmission Conference (OWPT2024), Yokohama, Japan, 22–26 April 2024. OWPT8-04. [Google Scholar]
- Ahmad, M.S.B.; Pesyridis, A.; Sphicas, P.; Andwari, A.M.; Gharehghani, A.; Vaglieco, B.M. Electric vehicle modelling for future technology and market penetration analysis. Front. Mech. Eng. 2022, 8, 896547. [Google Scholar]
- Kosai, S.; Takata, U.; Yamasue, E. Natural resource use of a traction lithium-ion battery production based on land disturbances through mining activities. J. Clean. Prod. 2021, 280, 124871. [Google Scholar] [CrossRef]
- Orangi, S.; Manjong, N.; Clos, D.P.; Usai, L.; Burheim, O.S.; Strømman, A.H. Historical and prospective lithium-ion battery cost trajectories from a bottom-up production modeling perspective. J. Energy Storage 2024, 76, 109800. [Google Scholar] [CrossRef]
- Ornes, S. How to recycle an EV battery. Proc. Natl. Acad. Sci. USA 2024, 121, e2400520121. [Google Scholar] [CrossRef]
- Zanoletti, A.; Carena, E.; Ferrara, C.; Bontempi, E. A review of lithium-ion battery recycling: Technologies, sustainability, and open issues. Batteries 2024, 10, 38. [Google Scholar] [CrossRef]
- Lin, Y.; Somervill, L.G.; Rashid, R.; Ledesma, R.I.; Kang, J.H.; Kavanagh, A.R.; Packard, J.S.; Scrudder, C.H.; Durgin, A.L.; Yamakov, V.I.; et al. Toward 500 Wh Kg−1 in Specific Energy with Ultrahigh Areal Capacity All-Solid-State Lithium–Sulfur Batteries. Small 2025, 2409536. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, J.; Lu, P.; Hu, G.; Xia, S.; Zhang, S.; Wang, Z.; Zhou, Z.; Yan, W.; Xia, W.; et al. Challenges and Strategies of Low-Pressure All-Solid-State Batteries. Adv. Mater. 2025, 37, 2413499. [Google Scholar] [CrossRef]
- Savari, G.F.; Sathik, M.J.; Raman, L.A.; El-Shahat, A.; Hasanien, H.M.; Almakhles, D.; Aleem, S.H.E.A.; Omar, A.I. Assessment of charging technologies, infrastructure and charging station recommendation schemes of electric vehicles: A review. Ain Shams Eng. J. 2023, 14, 101938. [Google Scholar] [CrossRef]
- Tajima, T.; Tanaka, H. Study of 450-kw Ultra Power Dynamic Charging System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Mahesh, A.; Chokkalingam, B.; Mihet-Popa, L. Inductive wireless power transfer charging for electric vehicles—A review. IEEE Access 2021, 9, 137667–137713. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z.; Zhao, H.; Zhu, L.; Shuai, C.; Chen, Z. Wireless power transfer by electric field resonance and its application in dynamic charging. IEEE Trans. Ind. Electron. 2016, 63, 6602–6612. [Google Scholar] [CrossRef]
- Shinohara, N.; Kubo, Y.; Tonomura, H. Wireless charging for electric vehicle with microwaves. In Proceedings of the 2013 3rd International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 29–30 October 2013; pp. 1–4. [Google Scholar]
- Trivino, A.; González-González, J.M.; Aguado, J.A. Wireless power transfer technologies applied to electric vehicles: A review. Energies 2021, 14, 1547. [Google Scholar] [CrossRef]
- Electreon. Findings from the World’s First Public Wireless Electric Road for Heavy-Duty Commercial Vehicles. Available online: https://electreon.com/articles/worlds-first-public-wireless-electric-road (accessed on 27 March 2025).
- eHighway.SH. Feldversuch eHighway Schleswig-Holstein. Available online: https://ehighway-sh.de/en/ (accessed on 27 March 2025).
- Taisei Corporation. T-iPower Road. Available online: https://www.taisei.co.jp/about_us/wn/2022/220921_8962.html (accessed on 18 January 2025).
- Honma, Y.; Hasegawa, D.; Hata, K.; Oguchi, T. Locational Analysis of In-motion Wireless Power Transfer System for Long-distance Trips by Electric Vehicles: Optimal Locations and Economic Rationality in Japanese Expressway Network. Netw. Spat. Econ. 2024, 24, 261–290. [Google Scholar] [CrossRef]
- Putra, A.W.S.; Tanizawa, M.; Maruyama, T. Optical wireless power transmission using Si photovoltaic through air, water, and skin. IEEE Photonics Technol. Lett. 2018, 31, 157–160. [Google Scholar] [CrossRef]
- Sahai, A.; Graham, D. Optical wireless power transmission at long wavelengths. In Proceedings of the 2011 International Conference on Space Optical Systems and Applications (ICSOS), Santa Monica, CA, USA, 11–13 May 2011; pp. 164–170. [Google Scholar]
- Zhao, M.; Miyamoto, T. 1 W High Performance LED-Array Based Optical Wireless Power Transmission System for IoT Terminals. Photonics 2022, 9, 576. [Google Scholar] [CrossRef]
- Tai, Y.; Miyamoto, T. Experimental characterization of high tolerance to beam irradiation conditions of light beam power receiving module for optical wireless power transmission equipped with a fly-eye lens system. Energies 2022, 15, 7388. [Google Scholar] [CrossRef]
- Ouyang, J.; Che, Y.; Xu, J.; Wu, K. Throughput maximization for laser-powered UAV wireless communication systems. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Watamura, T.; Nagasaka, T.; Kikuchi, Y.; Miyamoto, T. Flying a Micro-Drone by Dynamic Charging for Vertical Direction Using Optical Wireless Power Transmission. Energies 2025, 18, 351. [Google Scholar] [CrossRef]
- Xu, H.; Du, B.; Shi, D.; Huang, X.; Hou, X. Laser wireless power transfer system design for lunar rover. Space Sol. Power Wirel. Transm. 2024, 1, 129–135. [Google Scholar] [CrossRef]
- Fafard, S.; Masson, D.P. 74.7% Efficient GaAs-based laser power converters at 808 nm at 150 K. Photonics 2022, 9, 579. [Google Scholar] [CrossRef]
- Helmers, H.; Lopez, E.; Höhn, O.; Lackner, D.; Schön, J.; Schauerte, M.; Schachtner, M.; Dimroth, F.; Bett, A.W. 68.9% efficient GaAs-based photonic power conversion enabled by photon recycling and optical resonance. Phys. Status Solidi (RRL)–Rapid Res. Lett. 2021, 15, 2100113. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.; Zhao, Y.; Tang, S.; Lan, Y.; Zhao, Y.; Demir, A. 48 W continuous-wave output from a high-efficiency single emitter laser diode at 915 nm. IEEE Photonics Technol. Lett. 2022, 34, 1218–1221. [Google Scholar] [CrossRef]
- Rathod, Y.; Hughes, L. Simulating the charging of electric vehicles by laser. Procedia Comput. Sci. 2019, 155, 527–534. [Google Scholar] [CrossRef]
- Suda, Y.; Miyamoto, T. Estimation of CO2 Emissions of Dynamic Charging Electric Vehicle Using Optical Wireless Power Transmission. Rev. Laser Eng. 2023, 51, 163–170. Available online: https://ndlsearch.ndl.go.jp/books/R000000004-I032776452 (accessed on 27 April 2025).
- Chang, N.; Baek, D.; Hong, J. Power consumption characterization, modeling and estimation of electric vehicles. In Proceedings of the 2014 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Jose, CA, USA, 2–6 November 2014; pp. 175–182. [Google Scholar]
- UNECE. WLTP-DHC-12-07. Available online: https://unece.org/dhc-12th-session (accessed on 18 March 2025).
- UNECE. UNECE Adopts More Accurate Fuel Efficiency and CO2 Test for New Cars (WLTP). Available online: https://unece.org/press/unece-adopts-more-accurate-fuel-efficiency-and-co2-test-new-cars-wltp (accessed on 18 March 2025).
- Quintana, L.C.; Climent, L.; Arbelaez, A. Iterated local search for the ebuses charging location problem. In Proceedings of the Parallel Problem Solving from Nature-PPSN XVII, Dortmund, Germany, 10–14 September 2022; pp. 338–351. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Issue | Details/Causes | Countermeasures/Future Prospects |
|---|---|---|---|
| Battery EV | Weight, Size, Resources, Cost | Low energy density results in heavy and bulky batteries, that require large amounts of mined resources and contribute to high costs. | Recycling technologies (lithium, cobalt); development of high-density solid-state batteries. |
| Charging | Charging is manual and time-consuming. Fast charging reduces time but increases heat, equipment costs, and cable size. | Improve fast and wireless charging technologies. | |
| Driving Range | More batteries add weight and cost, reducing efficiency. Current ranges may not meet future autonomous driving needs. | Use solid-state batteries; dynamic charging while driving. | |
| Dynamic Power Transmission EV | Pantograph Method | Requires vehicle-specific infrastructure, making full road coverage complex and costly. | Trial projects underway; not suitable for all road types. |
| Magnetic/Electric Field Method | Short transmission distance and embedded infrastructure increase cost and maintenance requirements. | Limited use due to structural and cost constraints. | |
| Radio Wave Method | Allows longer range but suffers from beam loss and may interfere with other electronics. | Requires efficiency gains and reduced infrastructure burden. | |
| Optical Wireless Power Transmission (OWPT) | Allows long range and interference-free transmission. Narrow beam reduces loss over distance. | Up to 50% efficiency; suitable for multiple applications and helps reduce EV battery use and CO2 emissions. |
| Size | Name | Weight (kg) | Electricity Consumption (km/kWh) |
|---|---|---|---|
| Mini | Mitsubishi ekXEV | 1080 | 9.00 |
| Mini | Nissan SAKURA | 1070 | 9.00 |
| Compact | Honda e | 1540 | 7.30 |
| Compact | Nissan LEAF | 1520 | 8.05 |
| Standard | Toyota bZ4X | 1920 | 7.83 |
| Standard | Nissan ARIYA B6 | 1920 | 7.12 |
| Size | |||
|---|---|---|---|
| Mini | 0.40 | 0.011 | 0.70 |
| Compact | 0.58 | 0.008 | 0.75 |
| Standard | 0.58 | 0.006 | 0.78 |
| Averaged | 0.51 | 0.008 | 0.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawakami, M.; Miyamoto, T. Dynamic Optical Wireless Power Transmission Infrastructure Configuration for EVs. Energies 2025, 18, 2264. https://doi.org/10.3390/en18092264
Kawakami M, Miyamoto T. Dynamic Optical Wireless Power Transmission Infrastructure Configuration for EVs. Energies. 2025; 18(9):2264. https://doi.org/10.3390/en18092264
Chicago/Turabian StyleKawakami, Mahiro, and Tomoyuki Miyamoto. 2025. "Dynamic Optical Wireless Power Transmission Infrastructure Configuration for EVs" Energies 18, no. 9: 2264. https://doi.org/10.3390/en18092264
APA StyleKawakami, M., & Miyamoto, T. (2025). Dynamic Optical Wireless Power Transmission Infrastructure Configuration for EVs. Energies, 18(9), 2264. https://doi.org/10.3390/en18092264