
Route-Based Optimization Methods for Energy Consumption Modeling of Electric Trucks

 ,
,
Abstract
1. Introduction
2. Literature Reviews
2.1. Overview of Energy Consumption Models for Electric Vehicles
2.2. Integration of Regenerative Braking in Energy Models
2.3. Research Gaps and Objectives
- While regenerative braking is widely recognized as a critical factor, most models do not incorporate the probabilistic nature of regenerative braking events, which can significantly impact energy recovery.
- Few studies effectively integrate optimization techniques to adjust a comprehensive set of variables, including aerodynamics, rolling resistance, and novel parameters like regenerative probability.
- The development of an alternative model that integrates dynamic factors such as road grade, speed, regenerative braking efficiency, and regenerative probability, enhancing prediction accuracy.
- The establishment of regenerative probability as an innovative parameter, capturing the likelihood of regenerative braking events to improve energy recovery estimations.
- The validation of the proposed model against diverse real-world driving conditions to ensure its reliability, scalability, and practical relevance.
3. Methodology
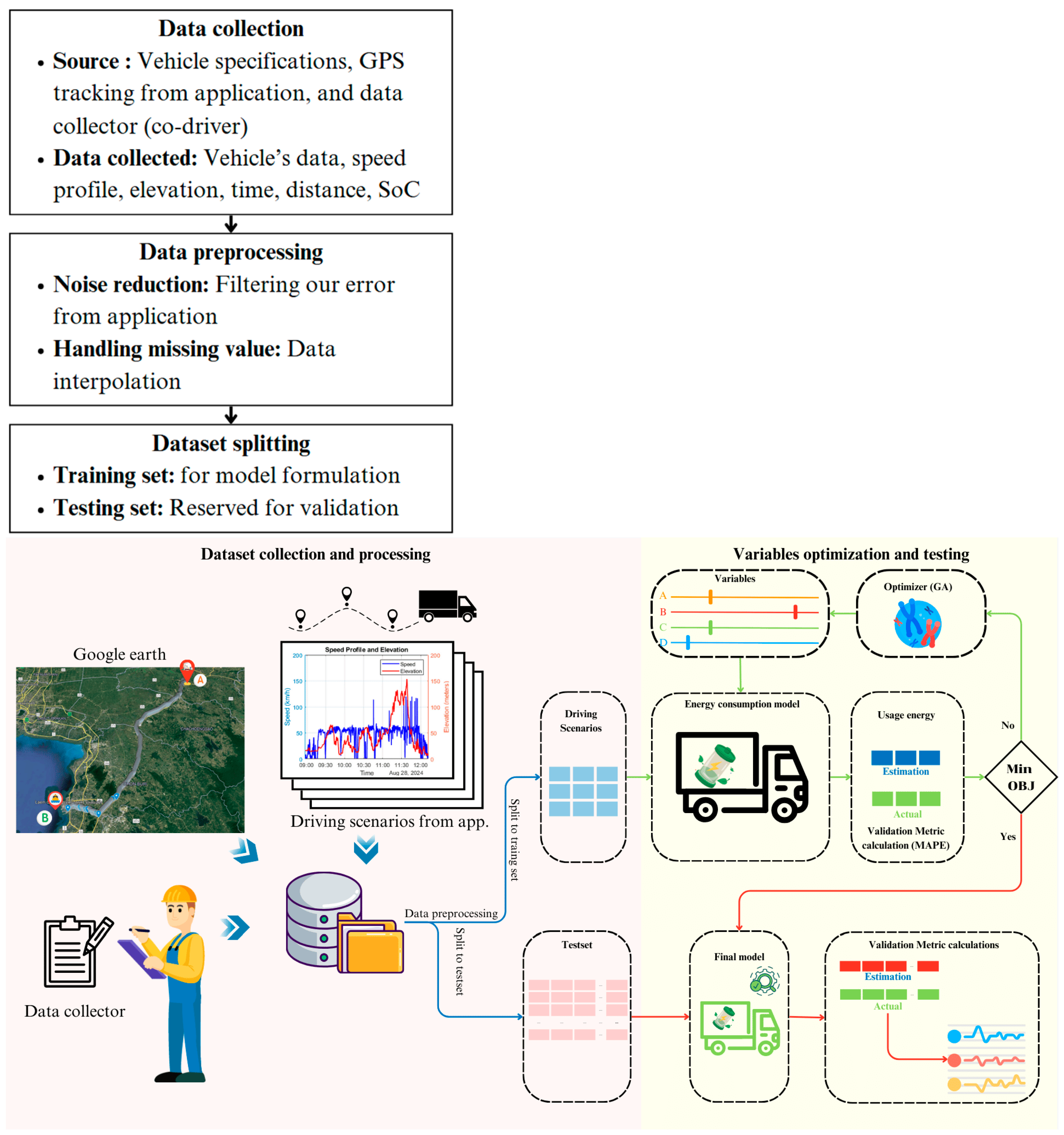
3.1. Framework Design
3.2. Data Acquisition and Preprocessing
3.3. Model Formulation
3.4. Optimization via Genetic Algorithm
3.5. Model Evaluation
4. Results and Discussion
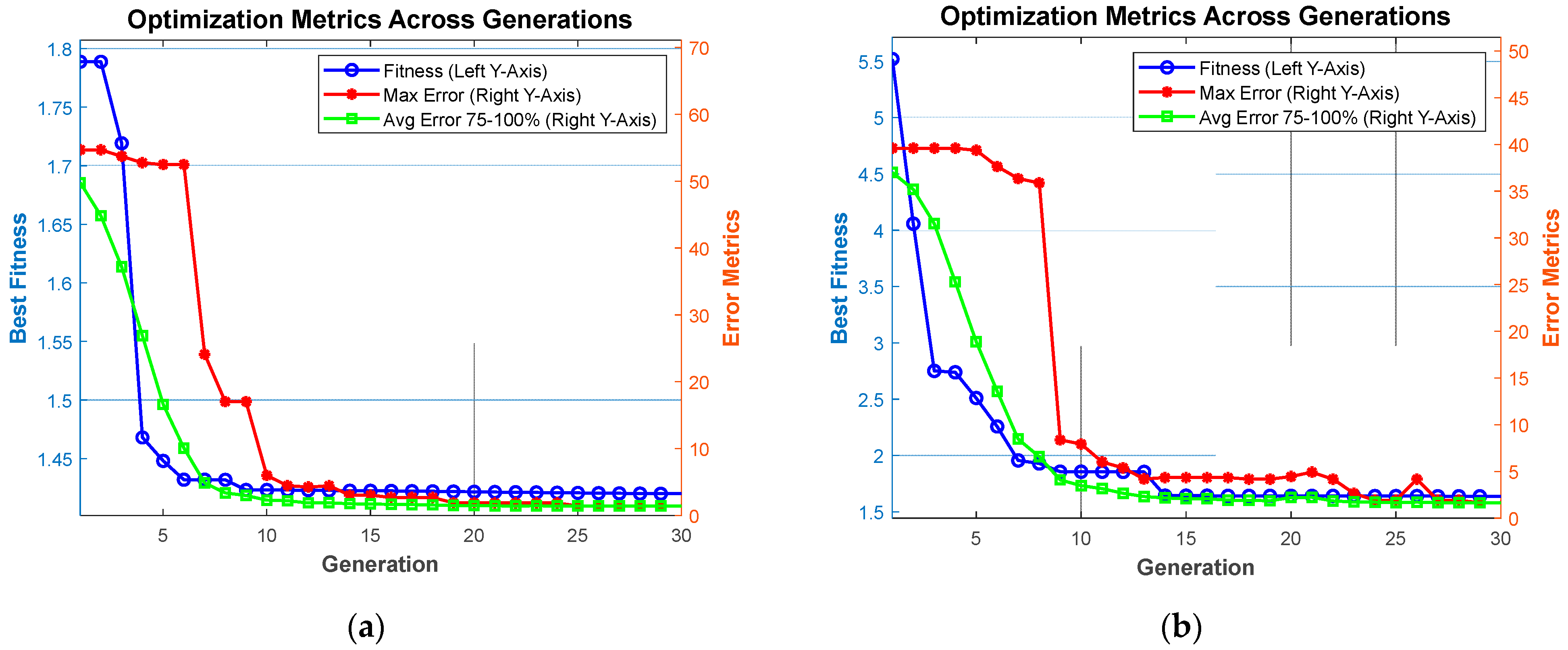
4.1. Optimization Outcomes
4.2. Prediction Accuracy
4.3. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Janpoom, K.; Suttakul, P.; Achariyaviriya, W.; Fongsamootr, T.; Katongtung, T.; Tippayawong, N. Investigating the influential factors in real-world energy consumption of battery electric vehicles. Energy Rep. 2023, 9, 316–320. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Sun, R. Data-driven estimation of energy consumption for electric bus under real-world driving conditions. Transp. Res. Part D: Transp. Environ. 2021, 98, 102969. [Google Scholar] [CrossRef]
- Huda, N.; Kaleg, S.; Hapid, A.; Kurnia, M.R.; Budiman, A.C. The Influence of the Regenerative Braking on the Overall Energy Consumption of a Converted Electric Vehicle. SN Appl. Sci. 2020, 2, 606. [Google Scholar] [CrossRef]
- Vigneshwar, A.S.; Kavitha, N.; Sureshbabu, J.; Chellam, S.; Chandrasekar, P.; Kalaiarasi, K. The Future Charged: Optimizing Electric Vehicle Performance through Advanced Power Management Strategies. In Proceedings of the 2024 7th International Conference on Circuit Power and Computing Technologies (ICCPCT), Kollam, India, 8–9 August 2024; pp. 775–780. [Google Scholar]
- Hasan, M.S.; Tarequzzaman, M.; Moznuzzaman, M.; Ahad Juel, M.A. Prediction of Energy Consumption in Four Sectors Using Support Vector Regression Optimized with Genetic Algorithm. Heliyon 2025, 11, e41765. [Google Scholar] [CrossRef] [PubMed]
- Mądziel, M.; Campisi, T. Predictive Artificial Intelligence Models for Energy Efficiency in Hybrid and Electric Vehicles: Analysis for Enna, Sicily. Energies 2024, 17, 4913. [Google Scholar] [CrossRef]
- Zhao, H.; He, R.; Yin, N. Modeling of Vehicle CO2 Emissions and Signal Timing Analysis at a Signalized Intersection Considering Fuel Vehicles and Electric Vehicles. Eur. Transp. Res. Rev. 2021, 13, 5. [Google Scholar] [CrossRef]
- Luin, B.; Al-Mansour, F.; Šemrov, D. Estimate of Traffic Energy Consumption From Vehicle Fleet Distribution Forecast. E3s Web Conf. 2019, 116, 00046. [Google Scholar] [CrossRef]
- Hendrix, E.M.T.; Rocha, A.M.A.C.; García, I. On Trajectory Optimization of an Electric Vehicle. In Proceedings of the Computational Science and Its Applications–ICCSA 2019: 19th International Conference, Saint Petersburg, Russia, 1–4 July 2019; pp. 249–260. [Google Scholar]
- Graba, M.; Mamala, J.; Bieniek, A.; Augustynowicz, A.; Czernek, K.; Krupińska, A.; Włodarczak, S.; Ochowiak, M. Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions. Energies 2023, 16, 5571. [Google Scholar] [CrossRef]
- Sunanda, B.V.; Parchure, R. An Economic Assessment of Electric Two-wheeler and Impact of Policy Instruments in Indian Sub-nationals. J. Dev. Policy Pract. 2024, 10, 24551333241294145. [Google Scholar] [CrossRef]
- Xu, W.; Chen, H.; Wang, J.; Zhao, H. Velocity Optimization for Braking Energy Management of in-Wheel Motor Electric Vehicles. IEEE Access 2019, 7, 66410–66422. [Google Scholar] [CrossRef]
- Wang, J.J.; Besselink, I.I.; Nijmeijer, H. Electric Vehicle Energy Consumption Modelling and Prediction Based on Road Information. World Electr. Veh. J. 2015, 7, 447–458. [Google Scholar] [CrossRef]
- Kropiwnicki, J.; Furmanek, M. Analysis of the Regenerative Braking Process for the Urban Traffic Conditions. Combust. Engines 2019, 178, 203–207. [Google Scholar] [CrossRef]
- Kıyaklı, A.O.; Solmaz, H. Modeling of an Electric Vehicle With MATLAB/Simulink. Int. J. Automot. Sci. Technol. 2018, 2, 9–15. [Google Scholar] [CrossRef]
- Chang, N.; Baek, D.; Hong, J. Power Consumption Characterization, Modeling and Estimation of Electric Vehicles. In Proceedings of the 2014 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Jose, CA, USA, 2–6 November 2014. [Google Scholar]
- Wood, W.; Zamora, D.; Sabzehgar, R.; Rasouli, M. Simulation-Based Comparative Analysis of Extractable Energy from Various Commercial Electric Vehicles During Regenerative Braking. In Proceedings of the 2024 IEEE 21st International Power Electronics and Motion Control Conference (PEMC), Pilsen, Czech Republic, 30 September–3 October 2024; pp. 1–6. [Google Scholar]
- Osman, A.; Tawfik, M.; Ali, A.M.; Asfoor, M.S. Evaluation of Electric Vehicle Performance Based on High-Fidelity Modeling and Experimental Testing. In Proceedings of the 2024 6th Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 19–21 October 2024; pp. 50–55. [Google Scholar]
- Miri, I.; Fotouhi, A.; Ewin, N. Electric Vehicle Energy Consumption Modelling and Estimation—A Case Study. Int. J. Energy Res. 2020, 45, 501–520. [Google Scholar] [CrossRef]
- Sakulphaisan, G.; Son-In, S.; Junhuathon, N.; Muankhaw, T. Speed Profile Optimization for Autonomous Electric Bus in Urban Area: Based on Service Route Parameter in Thailand. In Proceedings of the 2023 International Conference on Power, Energy and Innovations (ICPEI), Phrachuap Khirikhan, Thailand, 18–20 October 2023; pp. 149–154. [Google Scholar]
- Junhuathon, N.; Chayakulkheeree, K. Comparative Analysis of Electrification Technologies in Heavy-Duty Vehicles: A Case Study of Thailand. In Proceedings of the 2024 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Pattaya, Thailand, 9–12 July 2024; pp. 719–724. [Google Scholar]
- Zubair, M.; Chen, S.; Ma, Y.; Ong, G.P.; Pang, Q. Explore Driving Factors to Energy Consumption of Electric Vehicles Based on Structural Equation Modeling. Int. J. Green Energy 2024, 21, 1–11. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Regenerative Probability | Regenerative Power | Model Optimization | Method | Vehicle Type |
|---|---|---|---|---|---|
| [1] | ✘ | ✘ | ✔ | Data-driven | Personal car |
| [2] | ✘ | ✔ | ✔ | Hybrid | E-bus |
| [3] | ✘ | ✔ | ✘ | Physical | Personal car |
| [22] | ✘ | ✘ | ✘ | Data-driven | - |
| [18] | ✘ | ✔ | ✘ | Physical | Personal car |
| [19] | ✘ | ✔ | ✘ | Physical | Personal car |
| [6] | ✘ | ✔ | ✔ | Data-driven | Personal car |
| [20] | ✘ | ✔ | ✘ | Physical | E-Bus |
| [21] | ✘ | ✔ | ✘ | Physical | E-Truck |
| Proposed method | ✔ | ✔ | ✔ | Hybrid | E-Truck |
| Parameter | Value | Unit |
|---|---|---|
| Battery Type | Lithium Iron Phosphate () | - |
| Pack Voltage | 618.24 | V |
| Motor Power (Rated/Peak) | 220/360 | kW |
| Motor Torque (Rated/Peak) | 1401/3400 | Nm |
| Max Speed | 89 | km/h |
| Wheelbase (WB) | 3990 | mm |
| 1. Initialize Parameters: - Define population size (popSize) and number of generations (numGen) - Define crossover probability (Pc) - Define mutation probability (Pm) - Set variable bounds for ρ, Cd, Cr, A, m, g, Pacc, ηregen, pregen - Define the objective function: Obj = Minimize(ω1 × MAPE+ ω2 × errormean,p75to100 + ω3 × errormax) 2. Generate Initial Population: - Randomly generate ‘popSize’ individuals within the defined bounds. 3. Evaluate Fitness of Initial Population: - For each individual: a. Calculate the objective function value using the energy model b. Ensure all constraints are satisfied (apply penalties if not). 4. Loop for numGen Generations: a. Selection: - Select parents using a selection method. b. Crossover: - Perform crossover with probability Pc to create offspring. - Ensure offspring values remain within the variable bounds. c. Mutation: - Apply mutation to offspring with probability Pm. - Adjust mutated values to remain within bounds. d. Evaluate Fitness of Offspring: - Calculate the objective function value for each offspring. e. Survivor Selection: - Combine parents and offspring. - Select the top ‘popSize’ individuals based on fitness values. 5. Check Convergence: - If stopping criteria are met, terminate the loop. 6. Output Results: - Return the best individual (optimized variables) and its corresponding fitness value. |
| Trip | RBO | Considering pregen | Time | SoC (%) | Net Regenerative Energy (kWh) | ||||
|---|---|---|---|---|---|---|---|---|---|
| MAPE | RMSE | MAE | R2 | MaxError | |||||
| Tests classify by time | |||||||||
| Outbound | ✓ | ✓ | Off peak | 1.308 | 1.149 | 0.973 | 0.994 | 2.52 | - |
| ✓ | ✓ | Peak | 1.469 | 1.173 | 1.052 | 0.993 | 2.02 | - | |
| Return | ✓ | ✓ | Off peak | 1.291 | 0.509 | 0.427 | 0.997 | 1.66 | - |
| ✓ | ✓ | Peak | 1.664 | 0.746 | 0.591 | 0.993 | 1.84 | - | |
| Evaluated by method (Regenerative examination) | |||||||||
| RBO with likelihood | ✓ | ✓ | 1.32 | 1.14 | 0.98 | 0.994 | 2.56 | 16.90 | |
| RBO without likelihood | ✓ | 0.96 | 0.94 | 0.75 | 0.996 | 2.84 | 67.15 | ||
| Physical model | 3.09 | 2.39 | 2.17 | 0.97 | 3.78 | 67.30 | |||
| GRW (kTons) | Constrain | MAPE (%) | ρ | Cd | Cr | Pacc | ηregen | pregen |
|---|---|---|---|---|---|---|---|---|
| 24 | Without pregen | 2.85 | 1.2097 | 0.5330 | 0.0083 | 1957 | 0.591 | - |
| With pregen | 2.93 | 1.2094 | 0.5085 | 0.0079 | 2000 | 0.815 | 0.289 | |
| 37 | Without pregen | 0.88 | 1.2659 | 0.6390 | 0.0087 | 1816 | 0.661 | - |
| With pregen | 0.91 | 1.2067 | 0.5252 | 0.0068 | 1860 | 0.855 | 0.283 | |
| 40 | Without pregen | 0.95 | 1.2078 | 0.665 | 0.0079 | 1812 | 0.340 | - |
| With pregen | 0.96 | 1.2821 | 0.750 | 0.0069 | 1999 | 0.813 | 0.158 | |
| 44 | Without pregen | 1.09 | 1.2723 | 0.5933 | 0.0077 | 1797 | 0.6899 | - |
| With pregen | 1.10 | 1.2132 | 0.7054 | 0.0059 | 1739 | 0.8988 | 0.2815 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Junhuathon, N.; Sakulphaisan, G.; Prukmahachaikul, S.; Chayakulkheeree, K. Route-Based Optimization Methods for Energy Consumption Modeling of Electric Trucks. Energies 2025, 18, 1986. https://doi.org/10.3390/en18081986
Junhuathon N, Sakulphaisan G, Prukmahachaikul S, Chayakulkheeree K. Route-Based Optimization Methods for Energy Consumption Modeling of Electric Trucks. Energies. 2025; 18(8):1986. https://doi.org/10.3390/en18081986
Chicago/Turabian StyleJunhuathon, Nitikorn, Guntinan Sakulphaisan, Sitthiporn Prukmahachaikul, and Keerati Chayakulkheeree. 2025. "Route-Based Optimization Methods for Energy Consumption Modeling of Electric Trucks" Energies 18, no. 8: 1986. https://doi.org/10.3390/en18081986
APA StyleJunhuathon, N., Sakulphaisan, G., Prukmahachaikul, S., & Chayakulkheeree, K. (2025). Route-Based Optimization Methods for Energy Consumption Modeling of Electric Trucks. Energies, 18(8), 1986. https://doi.org/10.3390/en18081986