


Achieving NOx Emissions with Zero-Impact on Air Quality from Diesel Light-Duty Commercial Vehicles



Abstract
:
1. Introduction
2. Materials and Methods
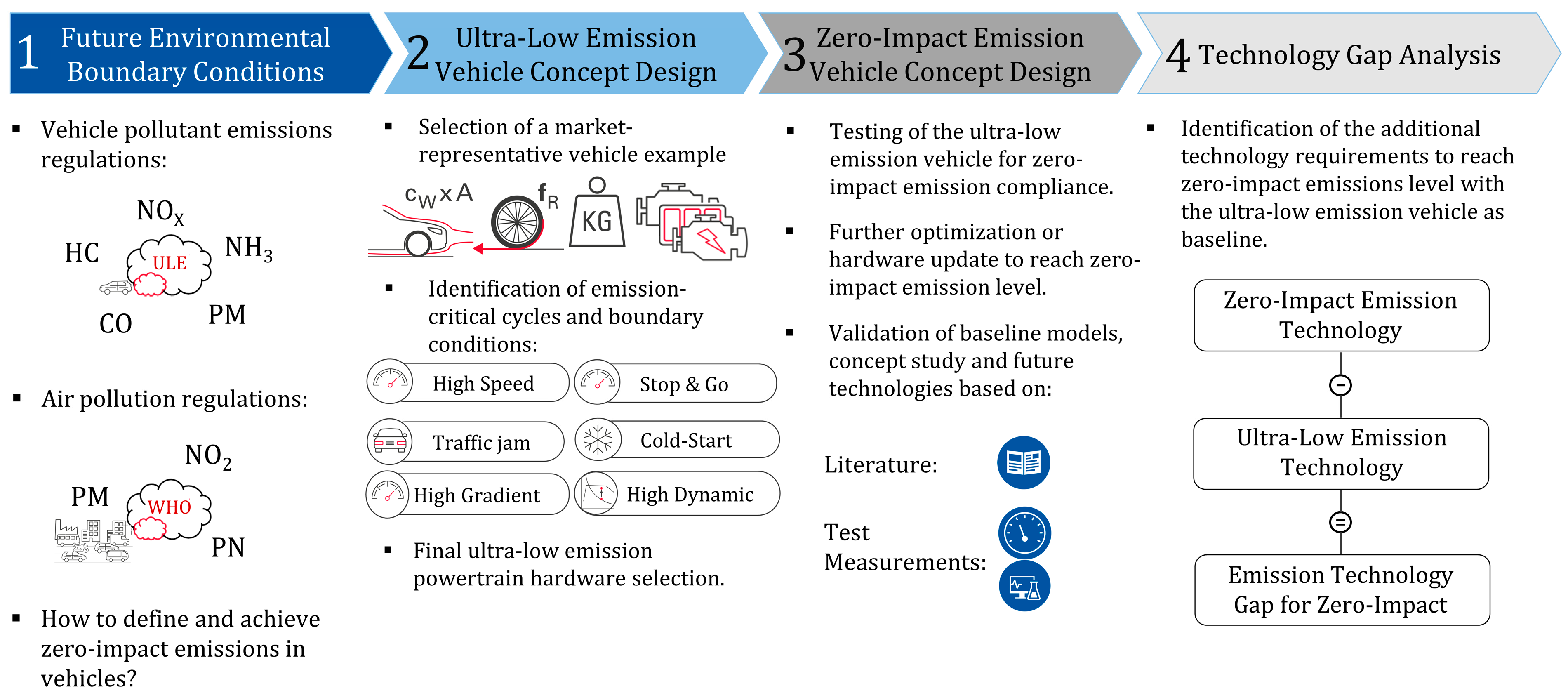
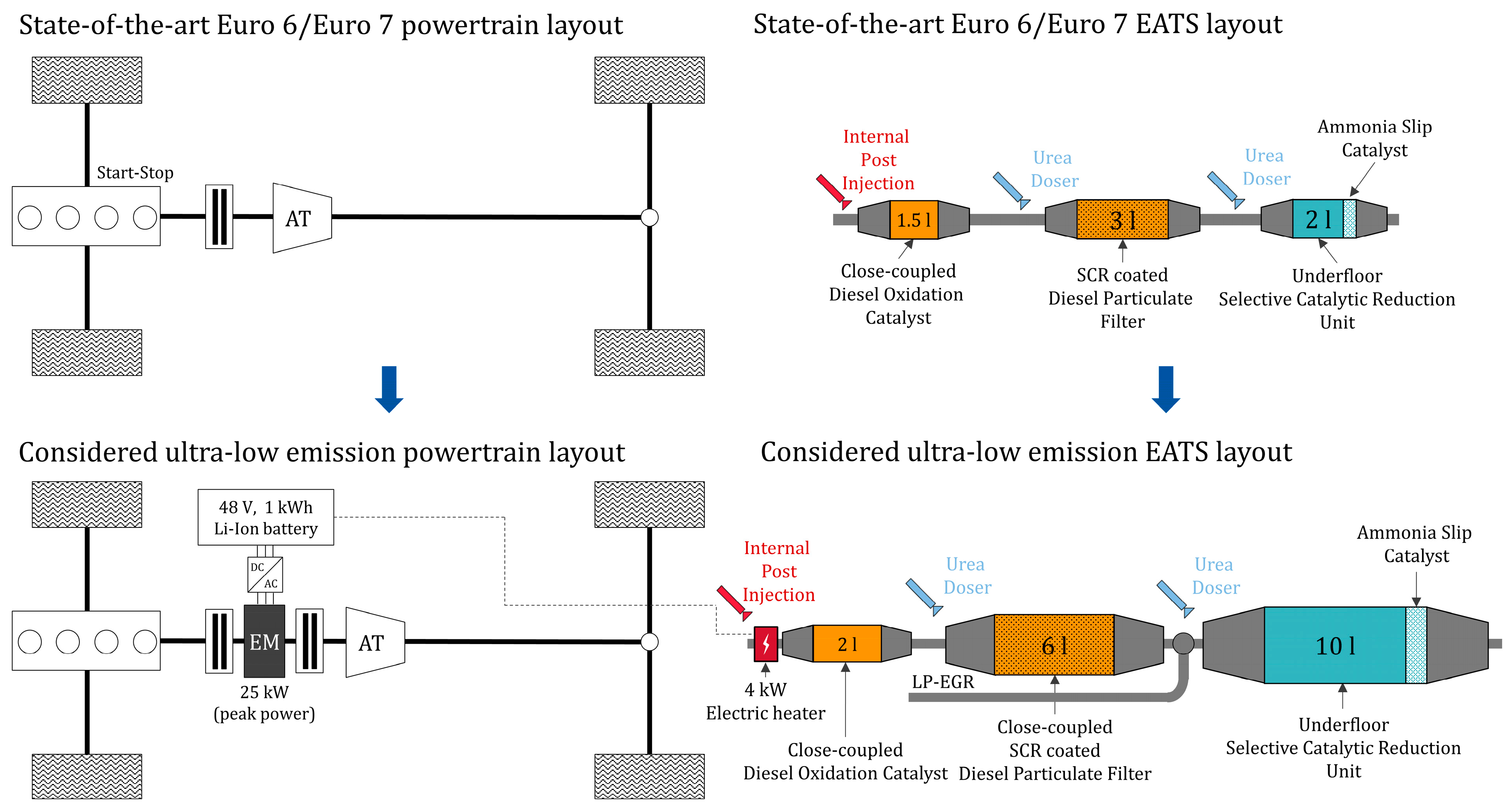
2.1. Research Approach
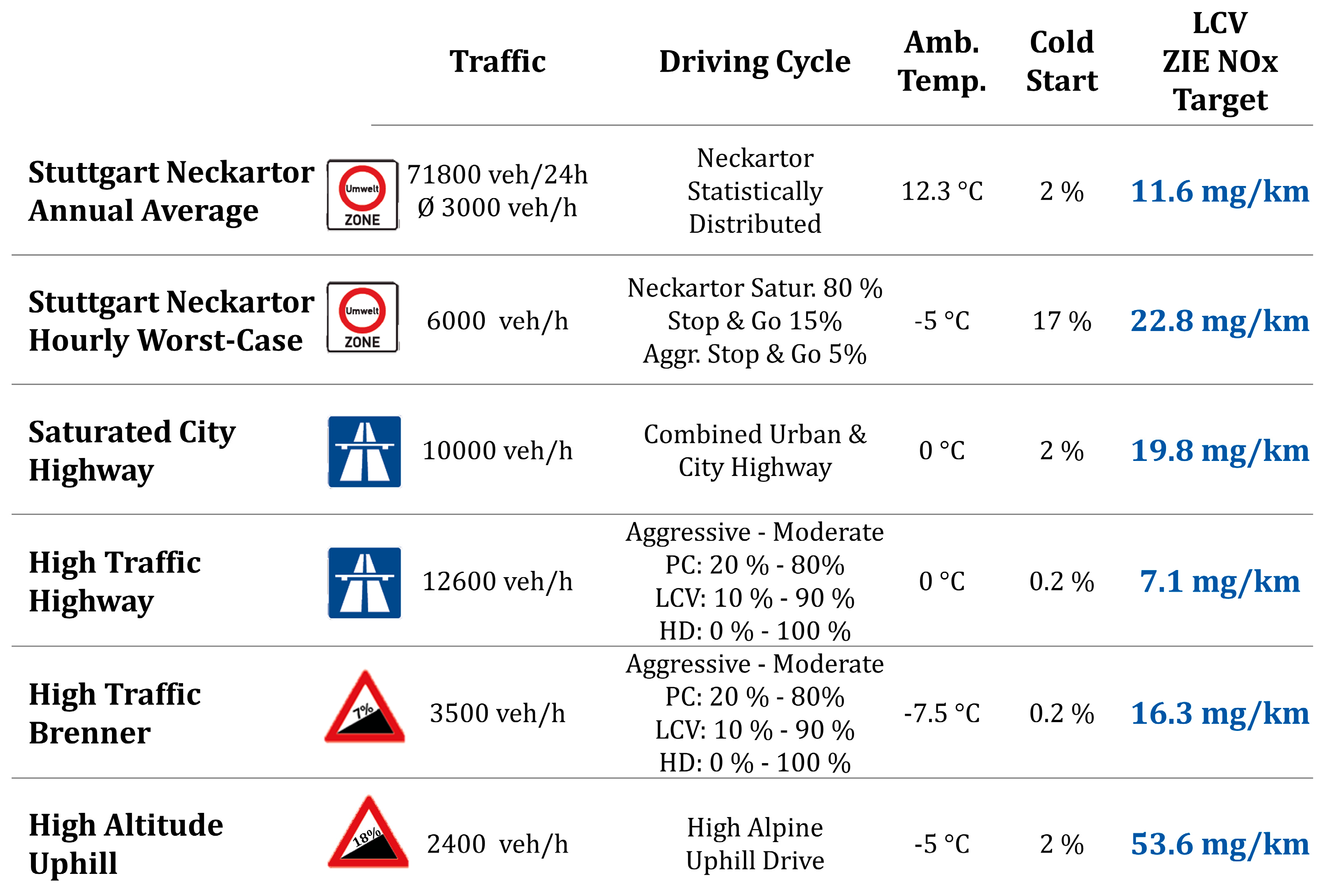
2.2. Considered Future Environmental Boundary Conditions for Vehicles
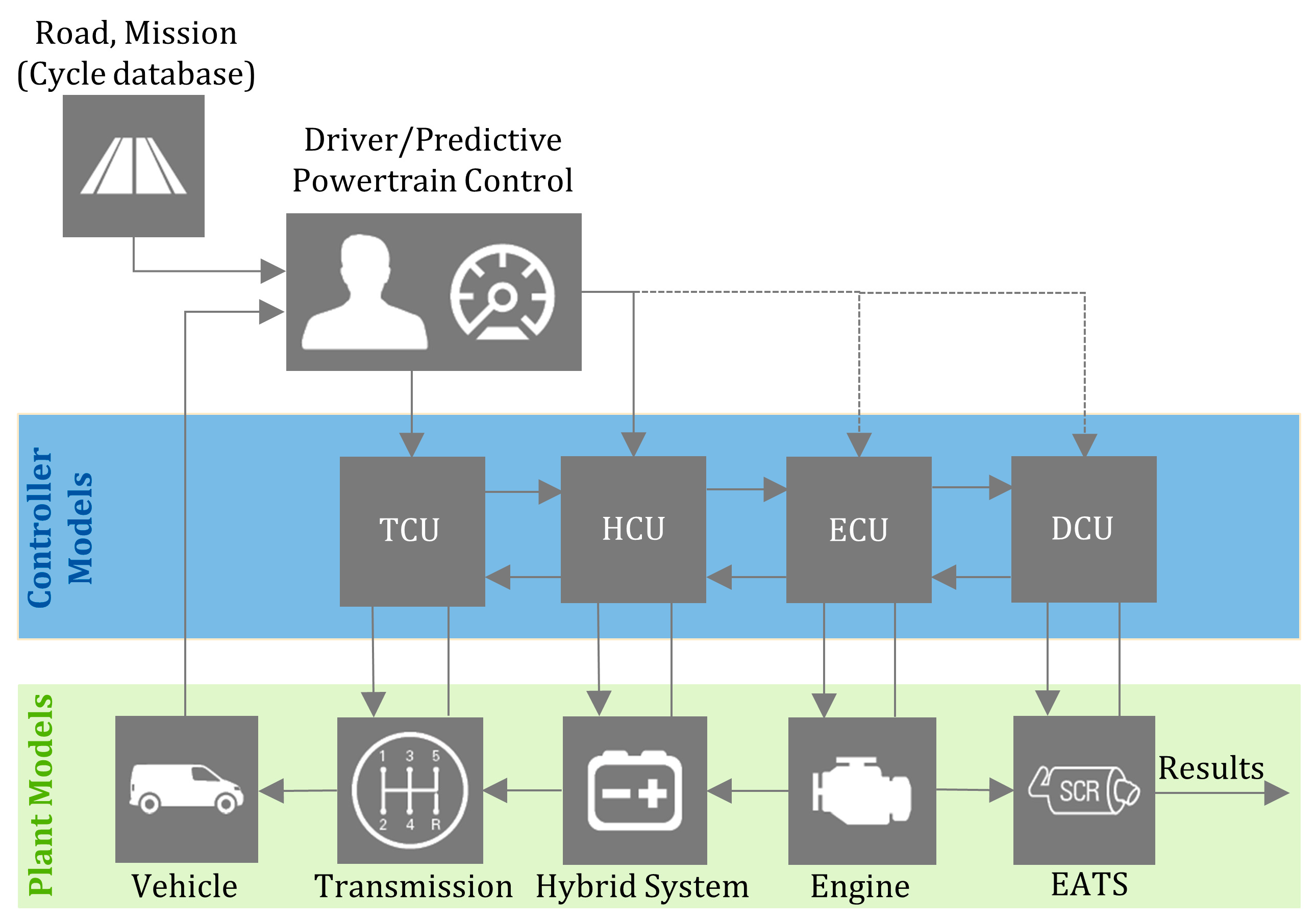
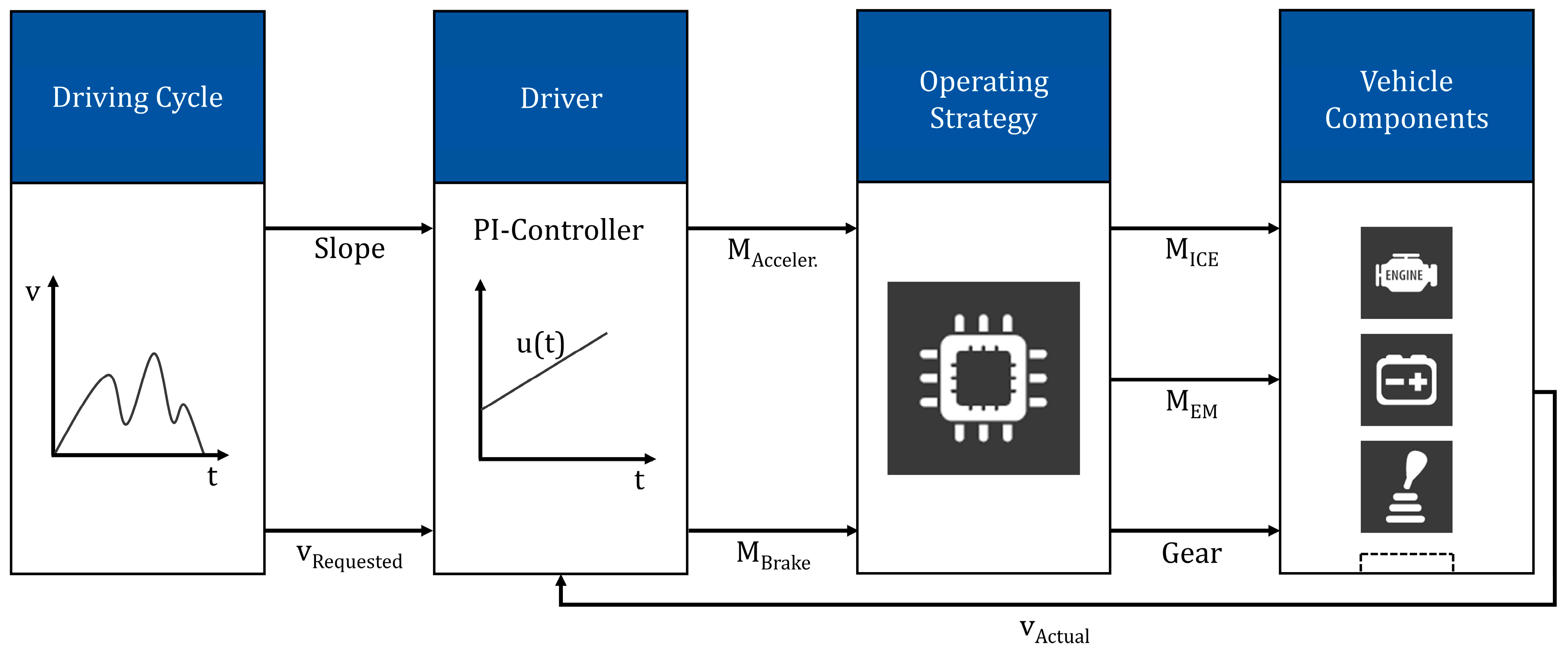
2.3. Utilized Models and Simulation Platform
3. Results and Discussion
3.1. Achieving Ultra-Low NOx Emissions
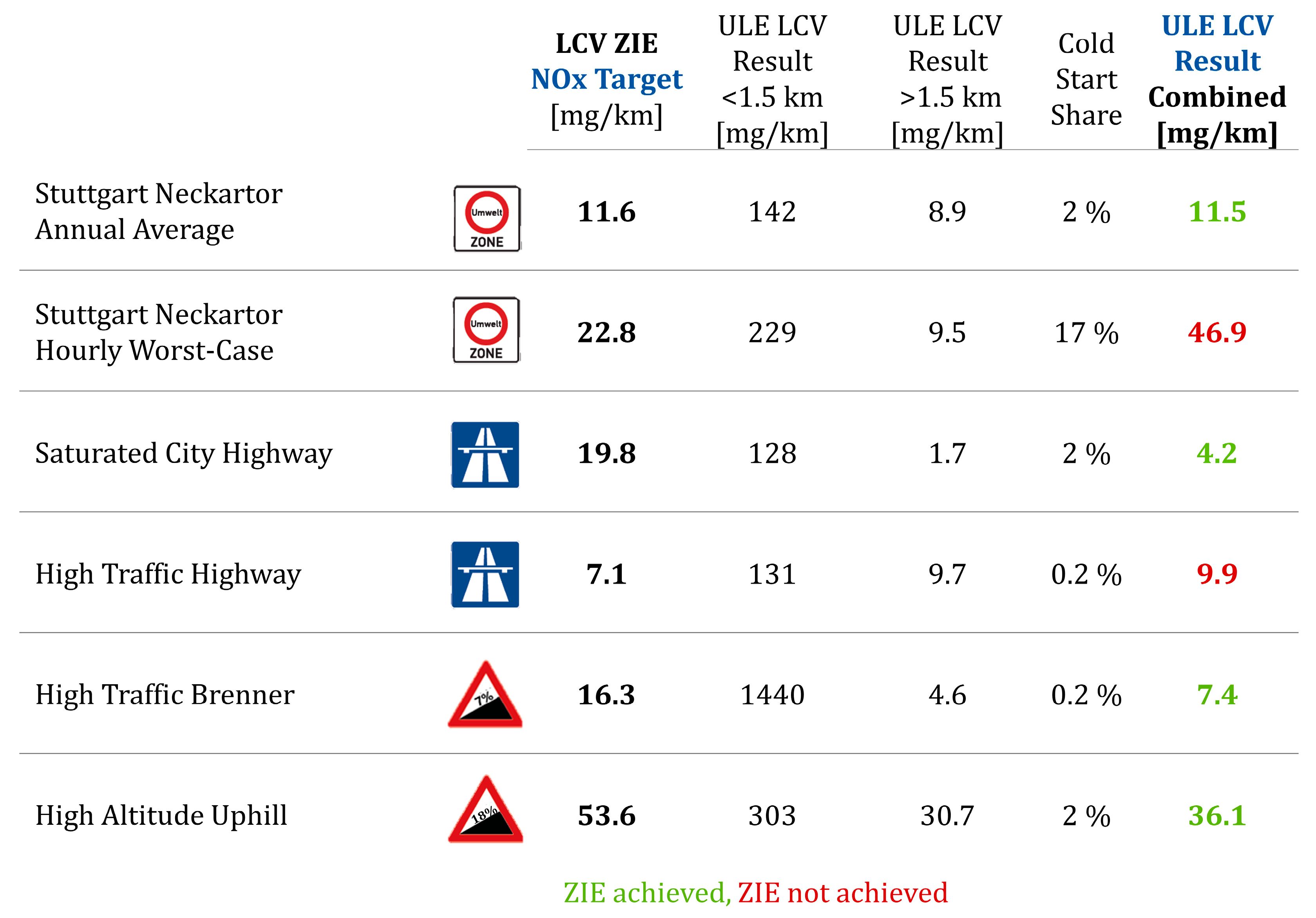
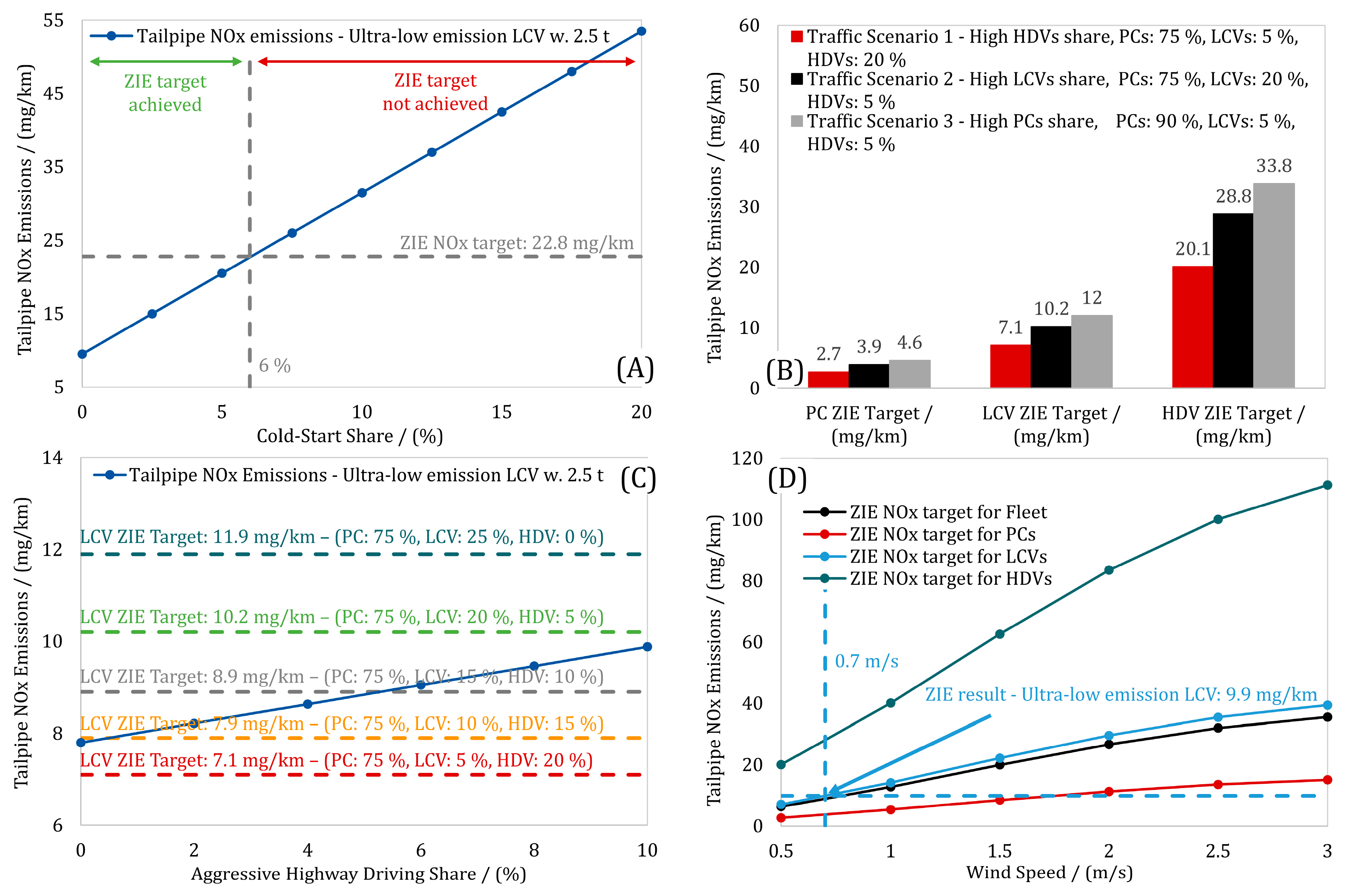
3.2. Challenges in Achieving Full Zero-Impact Emission Compliance with the Ultra-Low Emission Baseline Vehicle and Sensitivity Assessment of Key-Boundary Conditions
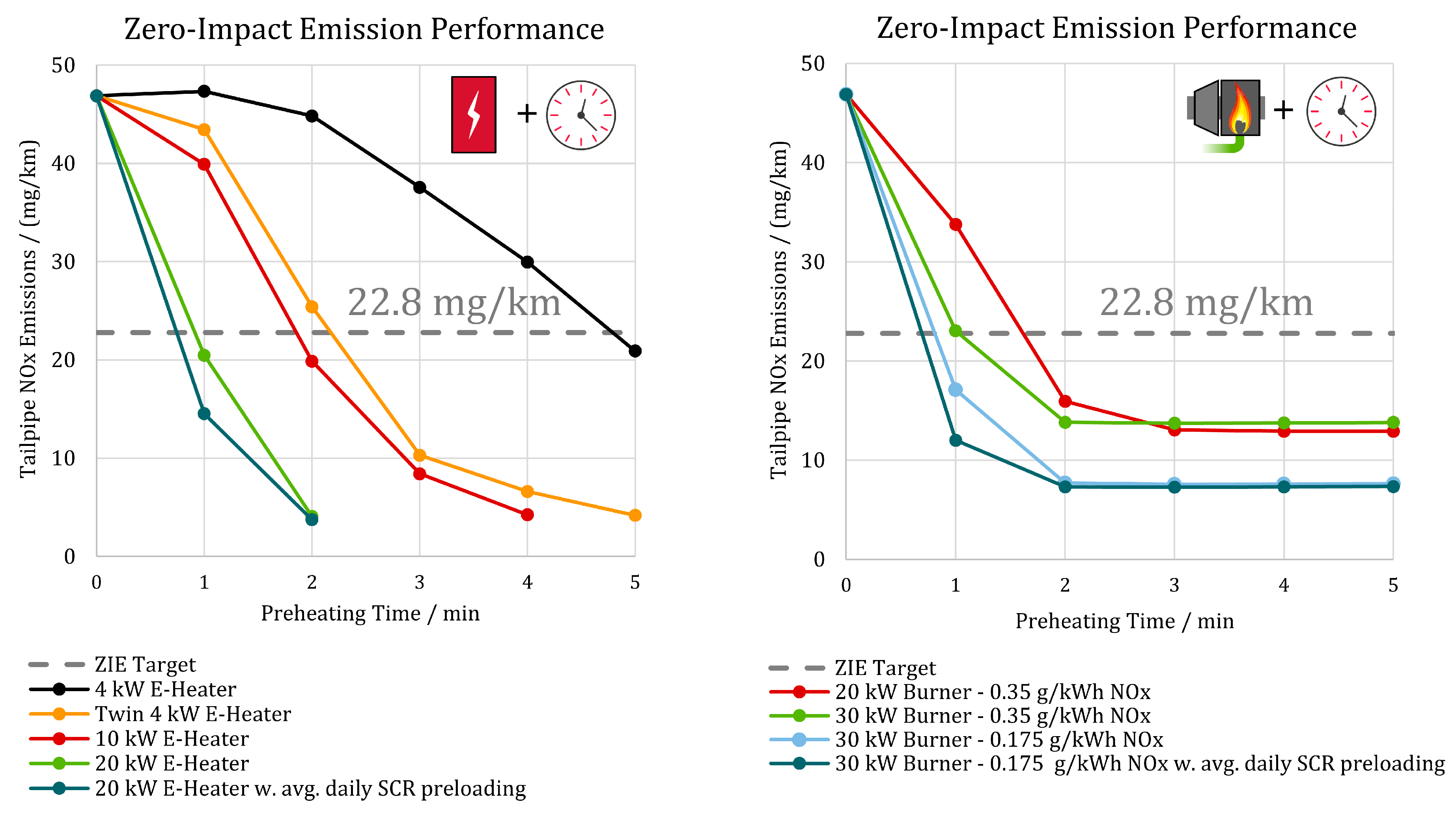
3.3. Advanced Emission Solutions to Achieve Full Zero-Impact Emission Compliance with the Ultra-Low Emission Baseline Vehicle
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EU | European Union |
| OBM | On-Board Monitoring |
| RDE | Real Driving Emission |
| ICE | Internal Combustion Engine |
| ZIE | Zero-Impact Emission |
| NRTC | Nonroad Transient Cycle |
| ULE | Ultra-low Emission |
| LCV | Light Commercial Vehicle |
| LDV | Light-Duty Vehicle |
| LD | Light-Duty |
| PC | Passenger Car |
| HD | Heavy-Duty |
| HDV | Heavy-Duty Vehicle |
| LLC | Low Load Cycle |
| FTP | Federal Test Procedure |
| EATS | Exhaust Gas Aftertreatment System |
| LNT | Lean NOx Trap |
| HBEFA | Handbook Emission Factors for Road Transport |
| WHO | World Health Organization |
| TCU | Transmission Control Unit |
| ECU | Engine Control Unit |
| HCU | Hybrid Control Unit |
| DCU | Doser Control Unit |
| EM | Electric Motor |
| M | Torque |
| v | Vehicle Speed |
| t | Time |
| MVEM | Mean Value Engine Model |
| HP | High-Pressure |
| LP | Low-Pressure |
| EGR | Exhaust Gas Recirculation |
| DOC | Diesel Oxidation Catalyst |
| SCR | Selective Catalytic Reduction |
| DPF | Diesel Particulate Filter |
| SDPF | Diesel Particulate Filter with Selective Catalytic Reduction coating |
| AT | Automatic |
| ASC | Ammonia Slip Catalyst |
| HP | High-Pressure |
| LP | Low-Pressure |
| cc | Close-coupled |
| uf | Underfloor |
| WLTC | Worldwide harmonized Light vehicles Test Cycle |
| SoC | State-of-Charge (battery) |
| NO2 | Nitrogen Dioxide |
| NOx | Nitrogen Oxides |
| H2 | Hydrogen |
| CO2 | Carbon Dioxide |
| HC | Hydrocarbons |
| CO | Carbon Monoxide |
| NH3 | Ammonia |
| O2 | Oxygen |
| ψ | Molar Fraction |
References
- Krecl, P.; Harrison, R.M.; Johansson, C.; Targino, A.C.; Beddows, D.C.; Ellermann, T.; Lara, C.; Ketzel, M. Long-term trends in nitrogen oxides concentrations and on-road vehicle emission factors in Copenhagen, London and Stockholm. Environ. Pollut. 2021, 290, 118105. [Google Scholar] [CrossRef] [PubMed]
- Harrison, R.M.; van Vu, T.; Jafar, H.; Shi, Z. More mileage in reducing urban air pollution from road traffic. Environ. Int. 2021, 149, 106329. [Google Scholar] [CrossRef] [PubMed]
- Hwang, H.; Choi, S.R.; Lee, J.Y. Evaluation of roadside air quality using deep learning models after the application of the diesel vehicle policy (Euro 6). Sci. Rep. 2022, 12, 20769. [Google Scholar] [CrossRef]
- Anenberg, S.C.; Miller, J.; Minjares, R.; Du, L.; Henze, D.K.; Lacey, F.; Malley, C.S.; Emberson, L.; Franco, V.; Klimont, Z.; et al. Impacts and mitigation of excess diesel-related NOx emissions in 11 major vehicle markets. Nature 2017, 545, 467–471. [Google Scholar] [CrossRef]
- European Parliament. Euro 7: Deal on New EU Rules to Reduce Road Transport Emissions; Press Room. 2023. Available online: https://www.europarl.europa.eu/news/en/press-room/20231207IPR15740/euro-7-deal-on-new-eu-rules-to-reduce-road-transport-emissions (accessed on 10 February 2025).
- EUR Lex. Regulation (EU) 2024/1257 of the European Parliament and of the Council of 24 April 2024 on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7), Amending Regulation (EU) 2018/858 of the European Parliament and of the Council and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009 of the European Parliament and of the Council, Commission Regulation (EU) No 582/2011, Commission Regulation (EU) 2017/1151, Commission Regulation (EU) 2017/2400 and Commission Implementing Regulation (EU) 2022/1362; EUR-Lex: Brussels, Belgium, 2024. [Google Scholar]
- Samaras, Z.; Balazs, A.; Ehrly, M.; Kontses, A.; Dimaratos, A.; Kontses, D.; Aakko, P.; Ligterink, N.; Andersson, J.; Scarbarough, T.; et al. LDV Exhaust. In Online AGVES Meeting. 2021. Available online: https://www.readkong.com/page/ldv-exhaust-presenter-prof-zissis-samaras-online-agves-9558553 (accessed on 10 February 2025).
- European Parliament; Council of the European Union. Proposal for a Regulation of the European Parliament and of the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009; EUR-Lex: Brussels, Belgium, 2022. [Google Scholar]
- Müller, V.; Pieta, H.; Schaub, J.; Ehrly, M.; Körfer, T. On-Board Monitoring to meet upcoming EU-7 emission standards—Squaring the circle between effectiveness and robust realization. Transp. Eng. 2022, 10, 100138. [Google Scholar] [CrossRef]
- Hausberger, S.; Uhrner, U.; Toenges-Schuller, N.; Stadlhofer, W.; Jost, S.; Reifeltshammer, R.; Schneider, C. Zero-Impact Vehicle Emissions (Conceptual Study): Definition and Requirements of Vehicle, Zero-Impact Emission Levels “Based on Ambient Air Quality”; FVV: Frankfurt am Main, Germany, 2022. [Google Scholar]
- Maurer, R.; Kossioris, T.; Hausberger, S.; Toenges-Schuller, N.; Sterlepper, S.; Günther, M.; Pischinger, S. How to define and achieve Zero-Impact Emissions in road transport? Transp. Res. Transp. Environ. 2023, 116, 103619. [Google Scholar] [CrossRef]
- Kossioris, T.; Maurer, R. Zero-Impact Tailpipe Emissions—Test Cycles, Mendeley Data, V1. Available online: https://data.mendeley.com/datasets/z4kdp3k6dp/1 (accessed on 10 February 2025).
- Roiser, S.; Beringer, S.; Schutting, E.; Eichlseder, H.; Rabe, T.; Krinn, I.; Adelmann, K. Driving Hydrogen Engines Towards a Zero-Impact Emission Level. In Internationaler Motorenkongress 2023; Heintzel, A., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2024; pp. 17–37. ISBN 978-3-658-44981-0. [Google Scholar]
- Koerfer, T.; Durand, T.; Busch, H. Advanced H2 ICE Development Aiming for Full Compatibility with Classical Engines While Ensuring Zero-Impact Tailpipe Emissions. In SAE Technical Paper Series. CO2 Reduction for Transportation Systems Conference, Turin, Italy; Koerfer, T., Durand, T., Busch, H., Eds.; SAE Internationa l400 Commonwealth Drive: Warrendale, PA, USA, 2024. [Google Scholar]
- Koerfer, T. Advanced Engineering Tools and Methodologies to Develop Fuel-Efficient and Zero-Impact H2 Engines for On- and Off-Highway Installations. In SAE Technical Paper Series. Conference on Sustainable Mobility, Catania, Italy; Koerfer, T., Ed.; SAE International: Warrendale, PA, USA, 2024. [Google Scholar]
- Demuynck, J.; Mendoza Villafuerte, P.; Bosteels, D.; Kuhrt, A.; Brauer, M.; Sens, M.; Williams, J.; Chaillou, C.; Gordillo, V. Advanced Emission Controls and E-fuels on a Gasoline Car for Zero-Impact Emissions. SAE Int. J. Adv. Curr. Prac. Mobil. 2023, 5, 1063–1069. [Google Scholar] [CrossRef]
- Kossioris, T.; Maurer, R.; Sterlepper, S.; Günther, M.; Pischinger, S. Challenges and Solutions to Meet the Euro 7 NOx Emission Requirements for Diesel Light-Duty Commercial Vehicles. Emiss. Control Sci. Technol. 2024, 10, 123–139. [Google Scholar] [CrossRef]
- Kühlwein, J. Driving Resistances of Light-Duty Vehicles in Europe: Present Situation, Trends, and Scenarios for 2025. Available online: https://theicct.org/publication/driving-resistances-of-light-duty-vehicles-in-europe-present-situation-trends-and-scenarios-for-2025 (accessed on 10 February 2025).
- Maurer, R.; Kossioris, T.; Sterlepper, S.; Günther, M.; Pischinger, S. Achieving Zero-Impact Emissions with a Gasoline Passenger Car. Atmosphere 2023, 14, 313. [Google Scholar] [CrossRef]
- Voelker, S.; Groll, N.; Bachmann, M.; Mueller, L.; Neumann, M.; Kossioris, T.; Muthyala, P.; Lehrheuer, B.; Hofmeister, M.; Vorholt, A.; et al. Towards carbon-neutral and clean propulsion in heavy-duty transportation with hydroformylated Fischer–Tropsch fuels. Nat. Energy 2024, 9, 1220–1229. [Google Scholar] [CrossRef]
- Matheaus, A.; Neely, G.; Sharp, C.; Hopkins, J.; McCarthy, J. Fast Diesel Aftertreatment Heat-Up Using CDA and an Electrical Heater. SAE Technical Paper 2021-01-0211. 2021. Available online: https://www.sae.org/publications/technical-papers/content/2021-01-0211/ (accessed on 10 February 2025).
- Hassdenteufel, A.; Schünemann, E.; Neubert, V.; Hirchenhein, A. Gasoline powertrain solutions with ultra low tailpipe emissions. Transp. Eng. 2022, 8, 100109. [Google Scholar] [CrossRef]
- Demuynck, J.; Favre, C.; Bosteels, D.; Randlshofer, G.; Bunar, F.; Spitta, J.; Friedrichs, O.; Kuhrt, A.; Brauer, M. Integrated Diesel System Achieving Ultra-Low Urban and Motorway NOx Emissions on the Road Reduzierung von NOx-Emissionen im realen Stadt- und Autobahnfahrbetrieb mit optimiertem Dieselantrieb. In Proceedings of the 40th Vienna Motor Symposium, Vienna, Austria, 16–17 May 2019. [Google Scholar]
- Lau, J.; Hatzopoulou, M.; Wahba, M.M.; Miller, E.J. Integrated Multimodel Evaluation of Transit Bus Emissions in Toronto, Canada. Transp. Res. Rec. 2011, 2216, 1–9. [Google Scholar] [CrossRef]
- Coelho, M.C.; Frey, H.C.; Rouphail, N.M.; Zhai, H.; Pelkmans, L. Assessing methods for comparing emissions from gasoline and diesel light-duty vehicles based on microscale measurements. Transp. Res. Transp. Environ. 2009, 14, 91–99. [Google Scholar] [CrossRef]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Effect of roundabout operations on pollutant emissions. Transp. Res. Transp. Environ. 2006, 11, 333–343. [Google Scholar] [CrossRef]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Impact of speed control traffic signals on pollutant emissions. Transp. Res. Transp. Environ. 2005, 10, 323–340. [Google Scholar] [CrossRef]
- Tang, J.; McNabola, A.; Misstear, B.; Pilla, F.; Alam, M.S. Assessing the Impact of Vehicle Speed Limits and Fleet Composition on Air Quality Near a School. Int. J. Environ. Res. Public Health 2019, 16, 149. [Google Scholar] [CrossRef]
- Alam, M.S.; Georgakis, P. The State of the Art of Cooperative and Connected Autonomous Vehicles from the Future Mobility Management Perspective: A Systematic Review. Future Transp. 2022, 2, 589–604. [Google Scholar] [CrossRef]
- Bandeira, J.M.; Macedo, E.; Fernandes, P.; Rodrigues, M.; Andrade, M.; Coelho, M.C. Potential Pollutant Emission Effects of Connected and Automated Vehicles in a Mixed Traffic Flow Context for Different Road Types. IEEE Open J. Intell. Transp. Syst. 2021, 2, 364–383. [Google Scholar] [CrossRef]
- Peters, J.F.; Burguillo, M.; Arranz, J.M. Low emission zones: Effects on alternative-fuel vehicle uptake and fleet CO2 emissions. Transp. Res. Part D Transp. Environ. 2021, 95, 102882. [Google Scholar] [CrossRef]
- Sánchez, J.M.; Ortega, E.; López-Lambas, M.E.; Martín, B. Evaluation of emissions in traffic reduction and pedestrianization scenarios in Madrid. Transp. Res. Transp. Environ. 2021, 100, 103064. [Google Scholar] [CrossRef]
- Gonzalez, J.N.; Gomez, J.; Vassallo, J.M. Do urban parking restrictions and Low Emission Zones encourage a greener mobility? Transp. Res. Transp. Environ. 2022, 107, 103319. [Google Scholar] [CrossRef]
- Sampaio, C.; Coelho, M.C.; Macedo, E.; Bandeira, J.M. Emissions based tolls—Impacts on the total emissions of an intercity corridor. Transp. Res. Part D Transp. Environ. 2021, 101, 103093. [Google Scholar] [CrossRef]
- Schaub, J.; Sammito, G.; Lindemann, B.; Kansy, W.; Muthyala, P.P.; Vogt, K.; Ehrly, M.; Lingemann, P.; Pischinger, S. Hybrid Powertrain Concepts for Light Commercial Vehicles. In 29. Aachen Colloquium Sustainable Mobility: October 5th–7th; Institute for Automotive Engineering; RWTH Aachen University: Aachen, Germany, 2020. [Google Scholar]
- Picerno, M.; Lee, S.-Y.; Schaub, J.; Ehrly, M.; Millo, F.; Scassa, M.; Andert, J. Co-Simulation of Multi-Domain Engine and its Integrated Control for Transient Driving Cycles. IFAC—PapersOnLine 2020, 53, 13982–13987. [Google Scholar] [CrossRef]
- Lee, S.-Y.; Andert, J.; Pischinger, S.; Ehrly, M.; Schaub, J.; Koetter, M.; Ayhan, A.S. Scalable Mean Value Modeling for Real-Time Engine Simulations with Improved Consistency and Adaptability; SAE Technical Paper 2019-01-0195; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Quérel, C.; Grondin, O.; Letellier, C. Semi-physical mean-value NOx model for diesel engine control. Control Eng. Pract. 2015, 40, 27–44. [Google Scholar] [CrossRef]
- Maiterth, J.M. Gesamtkosten-und emissionsoptimierte Systemauslegung von Nutzfahrzeug-Hybridantriebssträngen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2022. [Google Scholar]
- Vagnoni, G.; Karim, M.R.; Petri, S.; Lindberg, J.; Pantaleo, A.; Aubeck, F.; Schaub, J.; Mugovski, N.; Gelso, E.R. Predictive engine and aftertreatment control concepts for a heavy-duty long haul truck. In 27. Aachen Colloquium Automobile and Engine Technology: October 8th–10th; Institute for Automotive Engineering (RWTH Aachen): Aachen, Germany, 2018. [Google Scholar]
- Schönen, M.; Rosefort, Y.; Das, A.; Özyalcin, I.C.; Koll, V. Improved SCR Simulation and Control by Kinetic Modelling of the SCR Catalyst. In THIESEL Conference 2014: 9th–12th September, 8th Edition of the International Conference on Thermo-and Fluid Dynamic Processes in Direct Injection Engines; Conference Proceedings: Valencia, Spain, 2014. [Google Scholar]
- Laible, T. Aufbau eines Laborgasprüfstandes zur Entwicklung und Validierung von kalibrierbaren Katalysatormodellen. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2018. [Google Scholar]
- Omari, A. Characterization of Polyoxymethylen Dimethyl Ether for Diesel Engine Applications. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2021. [Google Scholar]
- WHO. WHO Air Quality Guidelines: Global Update 2005; World Health Organization: Copenhagen, Denmark, 2006; ISBN 9789289021920. [Google Scholar]
- INFRAS. Handbook Emission Factors for Road Transport (HBEFA): 3.1e Dokumentation; Infras: Philadelphia, PA, USA, 2010; Available online: https://www.hbefa.net/e/index.html (accessed on 22 June 2022).
- Friedrich, M. PKW-Fahrtweiten und Fahrzeiten zum Neckartor. Memo. 2017. Available online: https://www.isv.uni-stuttgart.de/institut/team/Friedrich-00003/ (accessed on 23 June 2022).
- European Commission. Vehicle Energy Consumption Calculation Tool—VECTO. Available online: https://ec.europa.eu/clima/eu-action/transport-emissions/road-transport-reducing-co2-emissions-vehicles/vehicle-energy-consumption-calculation-tool-vecto_en (accessed on 22 June 2022).
- LUBW. Traffic Counts in Baden-Württemberg. Available online: https://www7.lubw.baden-wuerttemberg.de/luft/verkehrszaehlungen-in-baden-wuerttemberg (accessed on 22 June 2022).
- LUBW. Maximum Traffic Volume per Hour at Neckartor in Stuttgart. E-Mail Correspondence with Mr. Helmut Scheu-Hachtel. 2022. Available online: https://www.lubw.baden-wuerttemberg.de/startseite (accessed on 23 June 2022).
- Federal Highway Research Institute. Automatische Zählstellen 2019. Available online: https://www.bast.de/DE/Verkehrstechnik/Fachthemen/v2-verkehrszaehlung/Daten/2019_1/Jawe2019.html?nn=1819490&cms_detail=5037&cms_map=0 (accessed on 22 June 2022).
- Federal Highway Research Institute. Automatische Zählstellen 2020. Available online: https://www.bast.de/DE/Verkehrstechnik/Fachthemen/v2-verkehrszaehlung/Aktuell/zaehl_aktuell_node.html (accessed on 22 June 2022).
- Zentralanstalt für Meteorologie und Geodynamik. Klimanormalwerte Österreich 1991–2020. Available online: https://www.zamg.ac.at/cms/de/klima/informationsportal-klimawandel/daten-download/copy_of_klimamittel (accessed on 22 June 2022).
- CLOVE Consortium. Preliminary Findings on Possible Euro 7 Emission Limits for LD and HD Vehicles. Available online: https://circabc.europa.eu/sd/a/fdd70a2d-b50a-4d0b-a92a-e64d41d0e947/CLOVE%20test%20limits%20AGVES%202020-10-27%20final%20vs2.pdf (accessed on 10 February 2025).
- Kwee, J.H.; Abel, D.; Pischinger, S. Gesamtsystembetrachtung Eines Diesel-Elektrischen Hybrid-Linienbusses unter Besonderer Berücksichtigung des SCR-Abgasnachbehandlungssystems: Lehrstuhl für Verbrennungskraftmaschinen und Institut für Thermodynamik. Ph.D. Thesis, Rheinisch-Westfälische Technische Hochschule Aachen, Aachen, Germany, 2019. [Google Scholar]
- Suarez, C.J.; Komnos, D.; Ktistakis, M.; Fontaras, G. 2025 and 2030 CO2 Emission Targets for Light Duty Vehicles; Publications Office of the European Union: Luxembourg, 2023. [Google Scholar]
- Kossioris, T.; Schaub, J.; Ehrly, M.; Maiterth, J.; Keizer, R.; an der Put, D. Evaluation of a Serial-parallel Hybrid Powertrain Concept for a Heavy Duty Truck. In FISITA World Congress 2021—Technical Programme; FISITA World Congress 2021; FISITA: Bishop’s Stortford, UK, 2021; ISBN 9781916025929. [Google Scholar]
- Charles, W.; Finkl, C.M. (Eds.) Encyclope dia of Coastal Science; Springer Nature Switzerland AG: Cham, Switzerland, 2019. [Google Scholar]
- Battistoni, M.; Zembi, J.; Casadei, D.; Ricci, F.; Martinelli, R.; Grimaldi, C.; La Sana, M.; Brignone, M.; Mantovanelli, A.; Milani, E. Burner Development for Light-Off Speed-Up of Aftertreatment Systems in Gasoline SI Engines; SAE International: Warrendale, PA, USA, 2022. [Google Scholar] [CrossRef]
- zu Schweinsberg, A.S.; Klenk, M.; Degen, A. Engine-Independent Exhaust Gas Aftertreatment Using a Burner Heated Catalyst; SAE International: Warrendale, PA, USA, 2006. [Google Scholar] [CrossRef]
- Bundesverband der Deutschen Heizungsindustrie. NOx-Emission bei Feuerungsanlagen. Information Sheet No. 66. 2020. Available online: https://www.bdh-industrie.de/fileadmin/user_upload/Publikationen/Infoblaetter/Infoblatt_Nr_66_NOx-Emission_Feuerungsanlagen_022020.pdf (accessed on 6 June 2023).
- European Union. Road Rules and Safety. Available online: https://europa.eu/youreurope/citizens/travel/driving-abroad/road-rules-and-safety/index_en.htm (accessed on 24 September 2024).
- Zhang, Z.; Ye, J.; Tan, D.; Feng, Z.; Luo, J.; Tan, Y.; Huang, Y. The effects of Fe2O3 based DOC and SCR catalyst on the combustion and emission characteristics of a diesel engine fueled with biodiesel. Fuel 2021, 290, 120039. [Google Scholar] [CrossRef]
- Lehrheuer, B.; Kossioris, T.; Muthyala, P.P.; Neumann, M.; Pischinger, S. Hydroformylated Fischer-Tropsch Fuels for Sustainable Transport. In Proceedings of the Conference on Powertrains with Renewable Energy Carriers, Stuttgart, Germany, 28–29 November 2023. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electric Preheating Power | Air Mass Flow Rate/ (g/s) | DOC Inlet Air Temperature/ (°C) | Electric Power Consumed During Preheating/(kWh/min) | SoC After Preheating/ (%) | NH3 Starting Load/ (-) |
|---|---|---|---|---|---|
| 4 kW | 12.4 | 300 | 0.072 | 15 | 5% of max. storage |
| 8 kW (2 × 4 kW) | 12.4 | 300 | 0.138 | 15 | 5% of max. storage |
| 10 kW | 20.7 | 450 | 0.175 | 15 | 5% of max. storage |
| 20 kW | 41.5 | 450 | 0.35 | 15 | 5% of max. storage |
| 20 kW (avg. NH3 preloading | 41.5 | 450 | 0.35 | 15 | WLTC end-value |
| Load/ (%) | CO/ (g/kWh) | NOx/ (g/kWh) | HC/ (g/kWh) | Soot/ (g/kWh) |
|---|---|---|---|---|
| 25 | 7.2 | 0.27 | 0.02 | 0.29 |
| 50 | 8.5 | 0.28 | 0.02 | 0.30 |
| 75 | 7.9 | 0.3 | 0.02 | 0.27 |
| 100 | 7.9 | 0.35 | 0.02 | 0.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kossioris, T.; Maurer, R.; Sterlepper, S.; Günther, M.; Pischinger, S. Achieving NOx Emissions with Zero-Impact on Air Quality from Diesel Light-Duty Commercial Vehicles. Energies 2025, 18, 1882. https://doi.org/10.3390/en18081882
Kossioris T, Maurer R, Sterlepper S, Günther M, Pischinger S. Achieving NOx Emissions with Zero-Impact on Air Quality from Diesel Light-Duty Commercial Vehicles. Energies. 2025; 18(8):1882. https://doi.org/10.3390/en18081882
Chicago/Turabian StyleKossioris, Theodoros, Robert Maurer, Stefan Sterlepper, Marco Günther, and Stefan Pischinger. 2025. "Achieving NOx Emissions with Zero-Impact on Air Quality from Diesel Light-Duty Commercial Vehicles" Energies 18, no. 8: 1882. https://doi.org/10.3390/en18081882
APA StyleKossioris, T., Maurer, R., Sterlepper, S., Günther, M., & Pischinger, S. (2025). Achieving NOx Emissions with Zero-Impact on Air Quality from Diesel Light-Duty Commercial Vehicles. Energies, 18(8), 1882. https://doi.org/10.3390/en18081882