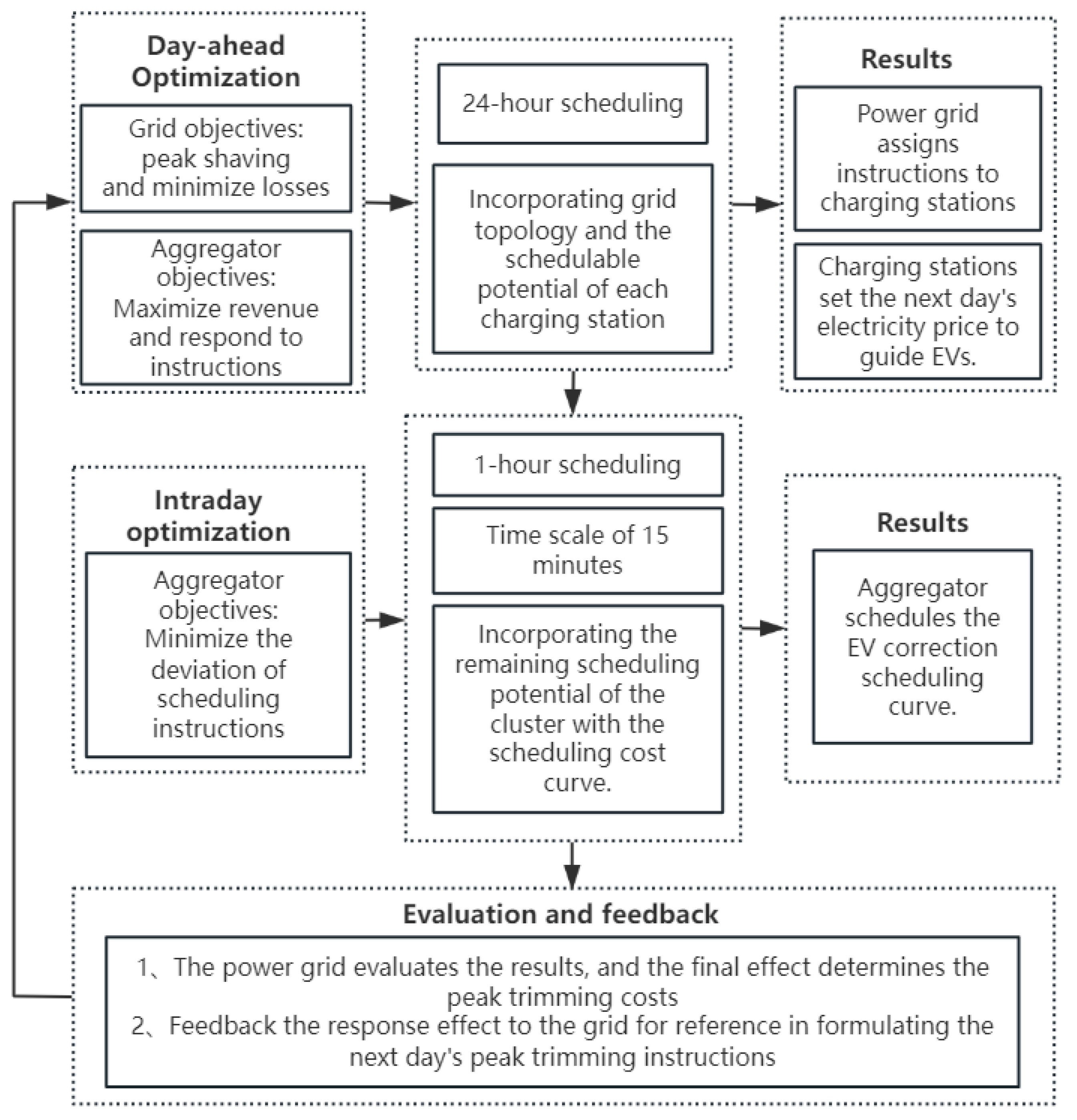
After the peak shaving scheduling is completed, the overall peak-shaving and valley-filling effect of the electric vehicle cluster is evaluated to determine the final unit price. Additionally, the evaluation results are fed back to the power grid, enabling it to promptly and accurately assess the actual response capability of the electric vehicle aggregator. This allows the grid to actively adjust the peak-shaving instructions for the aggregator in subsequent scheduling cycles.
The “average response deviation at each moment, the difference between the maximum and minimum response deviations, the proportion of accurate responses, and the reduction in peak-to-valley difference rate” are selected as the evaluation indicators for the aggregator’s final response effect. The Analytic Hierarchy Process (AHP) is used to determine the weights of different indicators, and then the comprehensive evaluation method of extensible matter elements is used to achieve a quantified comprehensive evaluation and feedback on the peak shaving effect of the electric vehicle aggregator.
The following four metrics are selected as the evaluation indicators for the aggregator’s final response effect: “average response deviation at each moment”, “difference between the maximum and minimum response deviations”, “proportion of accurate responses”, “reduction in peak-to-valley difference rate”.
The Analytic Hierarchy Process (AHP) is used to determine the weights of these indicators. Then, the comprehensive evaluation method of extensible matter elements is used to achieve a quantified comprehensive evaluation and feedback on the peak-shaving effect of the electric vehicle aggregator.
4.2.3. Matter–Element Extension Evaluation Method
- (1)
Construct the matter–element matrix :
In the formula, N represents the matter–element to be evaluated. represents the evaluation index. represents the specific calculated value of the evaluation index.
- (2)
Determine the matter–element matrix for the classical domain and the node domain :
In the formula,
indicates the
j-th level of the rating problem, which is divided into four levels: “A, B, C, D”, hence
j = 1, 2, 3, 4. The range of values that the evaluation index
takes with respect to the indicators
is defined as the classical domain
–
.
In the formula, represents the full set of data established for the rating problem. – is the total range of values that takes with respect to the evaluation indicators and is called the node domain.
In this paper, Level A represents the best performance, while Level D represents the worst. The levels A, B, C and D correspond to I1, I2, I3, I4 in Equation (46), respectively. The specific threshold selections for the four levels are , , and .
- (3)
Calculate the correlation function: The correlation function indicates the degree of association between the measured values and the various levels within the corresponding index. The correlation function values for the measured values of the index are calculated as in Formulas (47) and (48).
The distance
between the actual measured value of the indicator and the classical domain and node domain is given by the following formula:
From this, the correlation function moment can be constructed, which represents the degree of association between the actual measured value and the level. Based on this, the correlation function matrix
can be constructed, where
indicates the degree of association between the actual measured value of indicator
and the level
j:
4.2.4. Evaluation Results and Feedback
The overall correlation degree of each indicator can be calculated from the correlation function matrix and the weights of each indicator:
The maximum correlation degree is taken as the final evaluation level of the peak-shaving and valley-filling effect. When the correlation degree is highest, the corresponding evaluation levels are “A, B, C, D”. “A” indicates an excellent peak-shaving effect, and “D” indicates a poor peak-shaving effect.
In addition to the evaluation level, the characteristic value of the level
can be calculated to provide a more detailed quantification of the evaluation results:
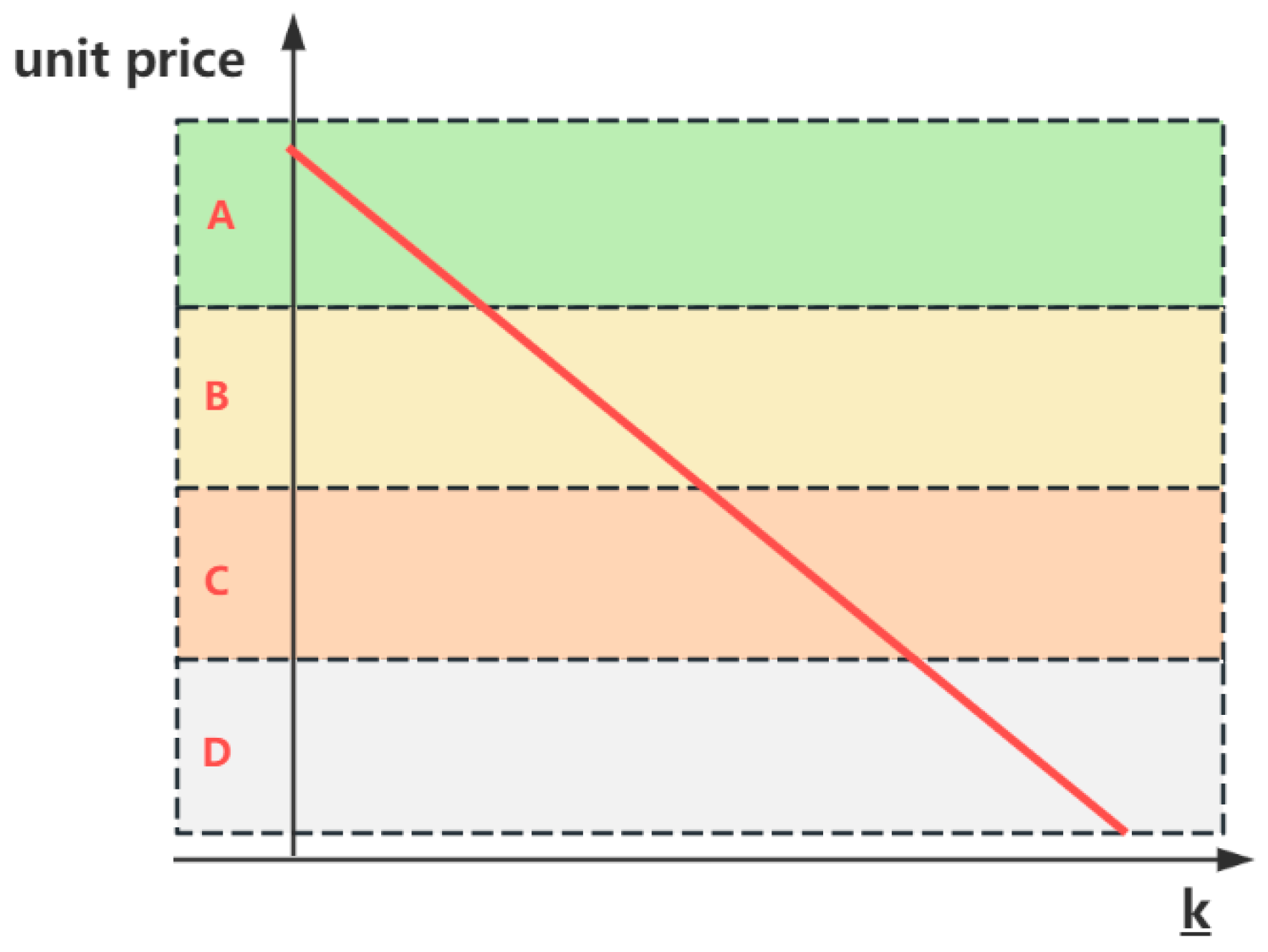
Based on the characteristic value
, we can further analyze its tendency to lean toward adjacent levels. The smaller the value of
, the better the evaluation effect. Therefore, the characteristic value can be used to determine the final unit price obtained by the charging station. The smaller the value of
, the higher the unit price. The relationship curve is shown in
Figure 3.
The following expression can be used to describe the situation:
The power grid ultimately rewards the electric vehicle aggregator for peak shaving and valley filling with:
The general extensible matter–element evaluation method integrates various indicators to determine the evaluation grade. However, to enable the power grid to more accurately analyze the actual scheduling effects, it is necessary to provide feedback on the evaluation grades for individual indicators separately. This allows the power grid to proactively adjust the scheduling strategies for aggregators in the next scheduling cycle, addressing specific issues.
For the evaluation grade of the
i-th indicator in the scheduling effect:
Based on this, we can obtain the evaluation grades for the individual indicators and provide feedback on the evaluation results of these four indicators to the power grid. The grid will then use these results to proactively adjust the scheduling strategies in the next cycle, ensuring that the peak-shaving instructions are more aligned with the actual response capabilities of the electric vehicle cluster. This ultimately leads to the formation of a multi-time-scale closed-loop scheduling system that can continuously adapt to real-world conditions. The detailed adjustment strategies are as follows:
If indicator (average response deviation at each moment) is rated as D, the peak-shaving and valley-filling target for each period is uniformly reduced by , that is, . Conversely, if the result is A, the target is uniformly increased by , that is, .
If the indicator (the difference between the maximum and minimum response deviations) is rated as D, the top 10% of moments with the largest response deviations are identified (denoted as ). The peak-shaving and valley-filling target for each period of is then uniformly reduced by , that is, . Conversely, if the result is A, the top 10% of moments with the smallest response deviations are identified (also denoted as ), and the target is uniformly increased by , that is, .
If the indicator (the proportion of accurate responses) is rated as D, all moments that exceed the allowed response deviation are identified (denoted as ). The peak-shaving and valley-filling target for each period of is then uniformly reduced by , that is, . Conversely, if the result is A, all moments within the allowed response deviation are identified (also denoted as ) and the target is uniformly increased by , that is, .
If the indicator (the reduction in peak-valley difference ratio) is rated as D, the top 10% of moments with the highest and lowest distribution network loads are identified (denoted as ). The peak-shaving and valley-filling target for each period of is then uniformly reduced by , that is, . Conversely, if the result is A, then the indicators for are uniformly increased by , that is, .








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}