
Quantitative Difference Between the Effective Inertia and Set Inertia Parameter of Virtual Synchronous Generators

 , , , , and
, , , , and
Abstract
1. Introduction
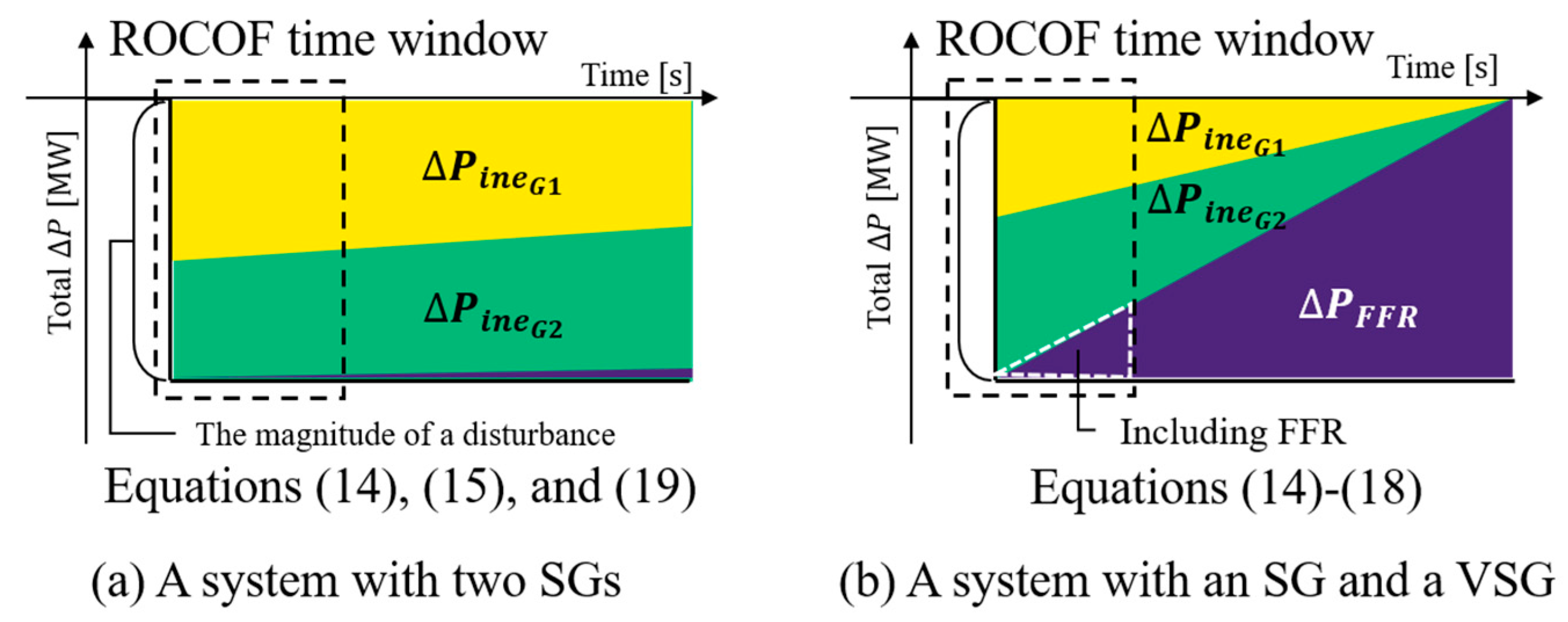
- We theoretically and quantitatively demonstrated that the EI of a VSG with an FFR can exceed the set inertia parameter because the FFR provides additional output in the inertia-time domain in an SG-VSG hybrid system.
- We conducted a sensitivity analysis of the effects of the set parameters in the VSG active power control on the EI value obtained from the developed EI equation.
- We conducted a sensitivity analysis of the effect of the VSG capacity ratio in the power system on the EI value in terms of the initial load share between the generators owing to the synchronizing power coefficient.
- – Effective inertia (EI): The inertia value per unit capacity of generators, back-calculated from the rate of change of frequency (ROCOF).
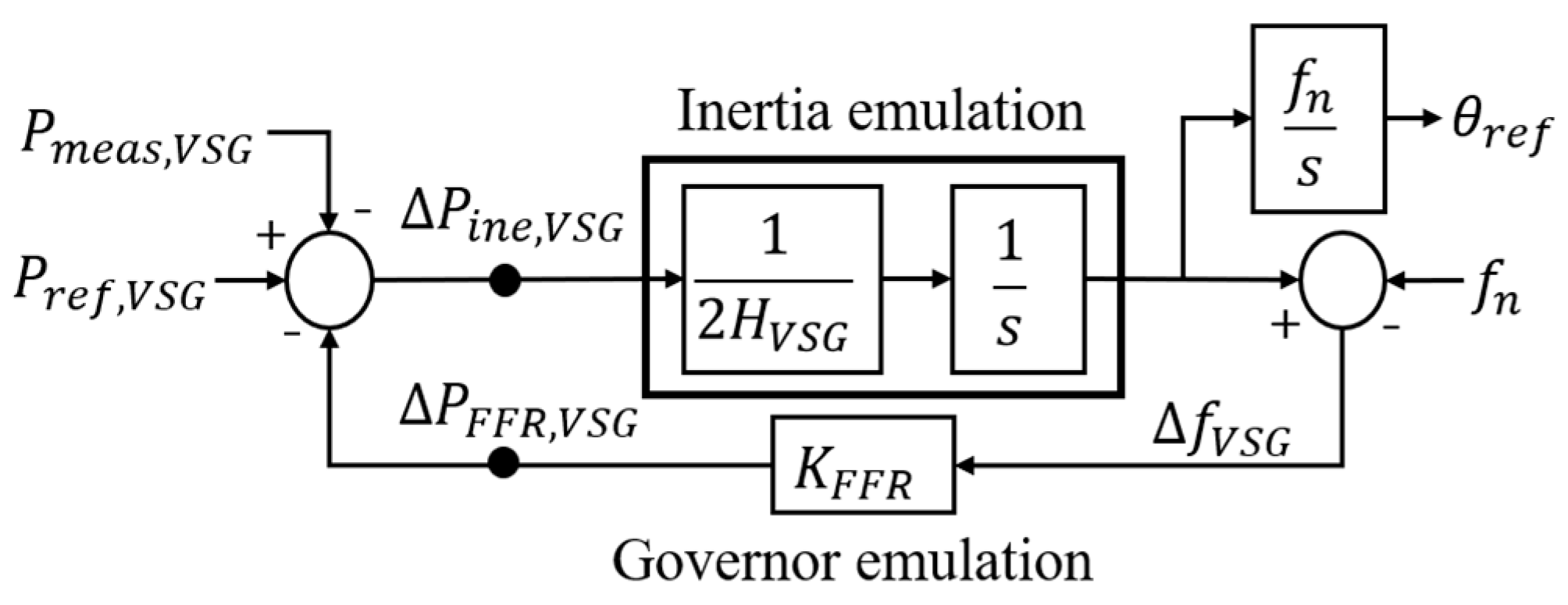
- – Set inertia parameter: The inertia value specified in the VSG’s inertia emulation block.
- – Fast frequency response (FFR): The VSG’s governor controls without delay (proportional control), acting more rapidly than the conventional SG governor.
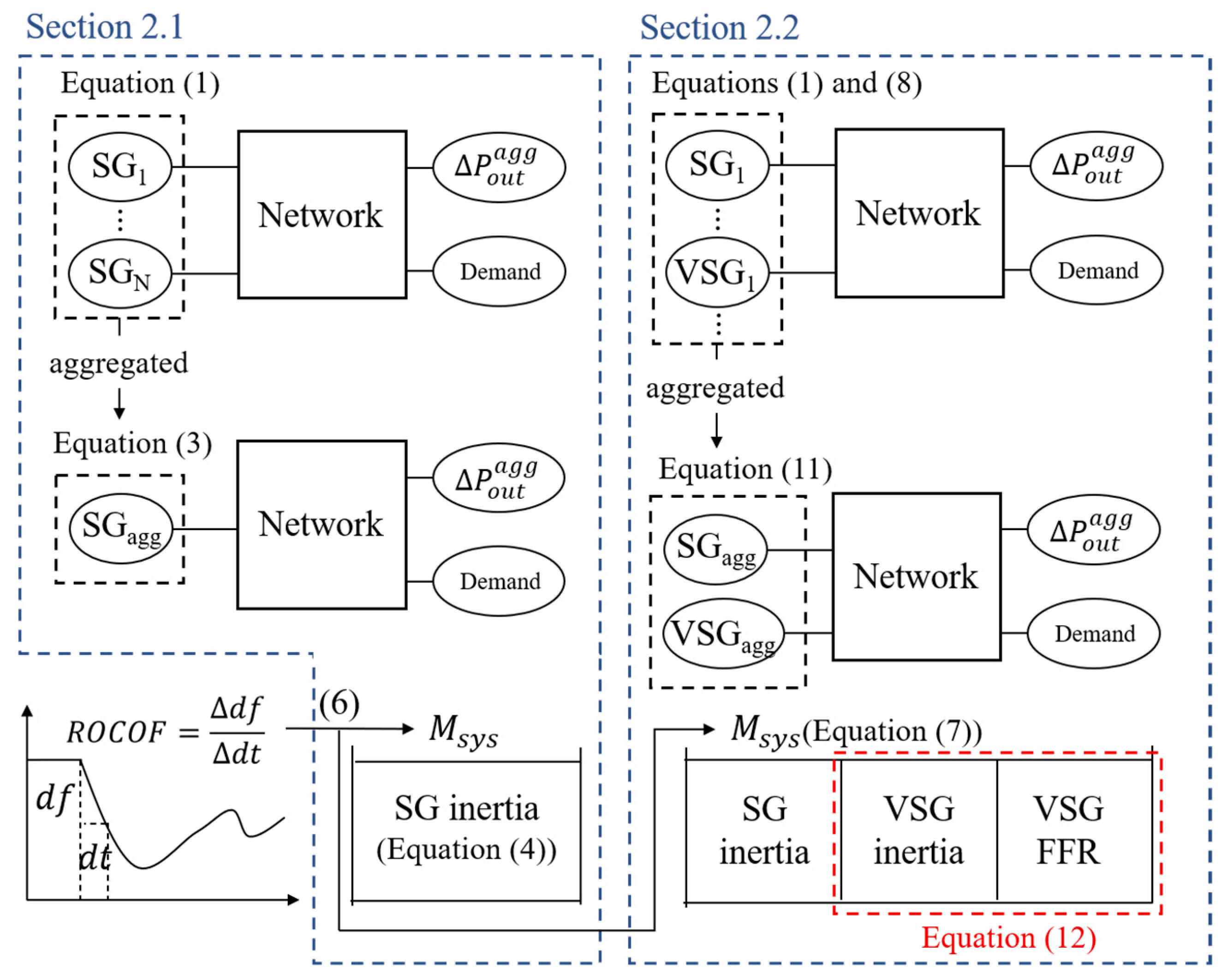
2. Definition of Effective Inertia on the ROCOF
2.1. Physical Inertia and ROCOF of SGs
2.2. Definition of the EI of VSGs
3. Factors Affecting the EI
3.1. Effect of Set Parameters on VSGs
3.2. Effect of the VSG Capacity Ratio
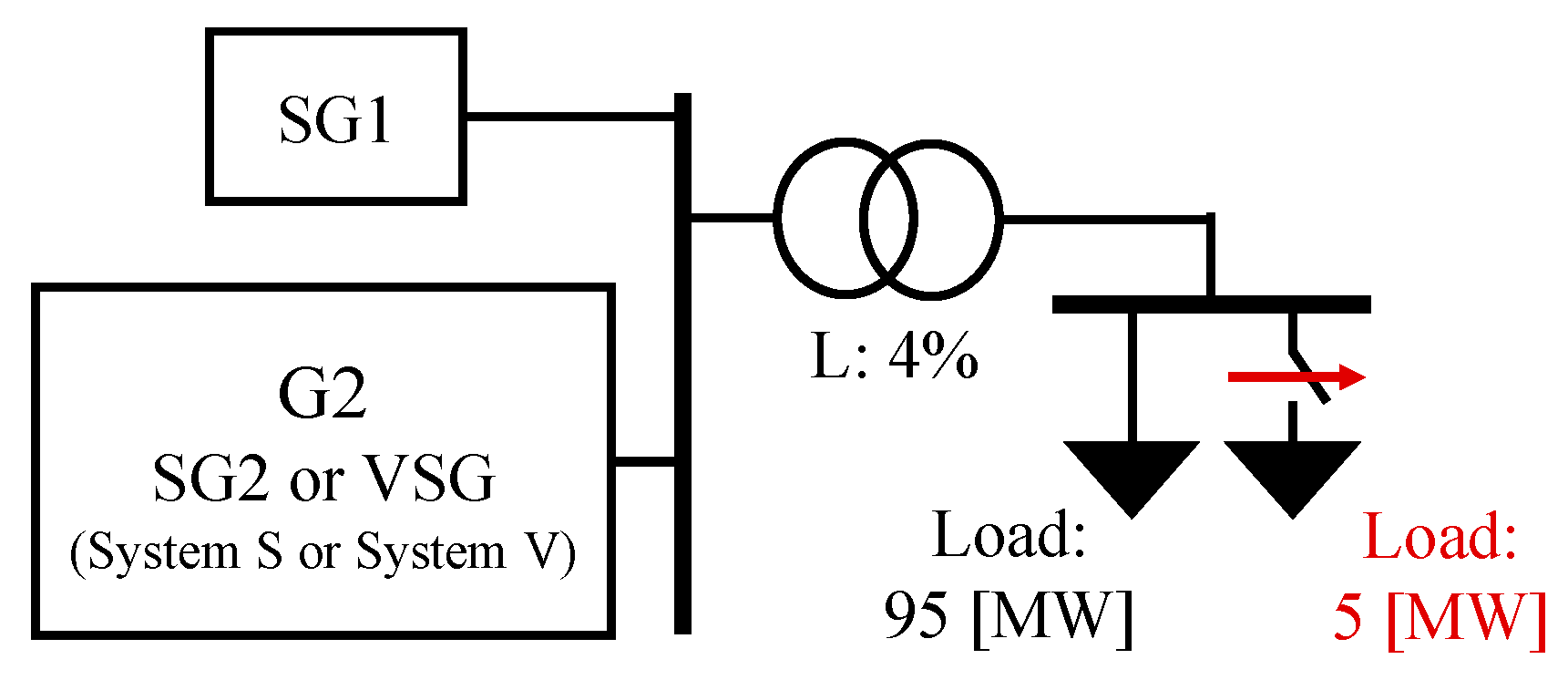
4. Case Study Simulation Settings
4.1. Simulation Model
4.2. EI Calculation Procedure
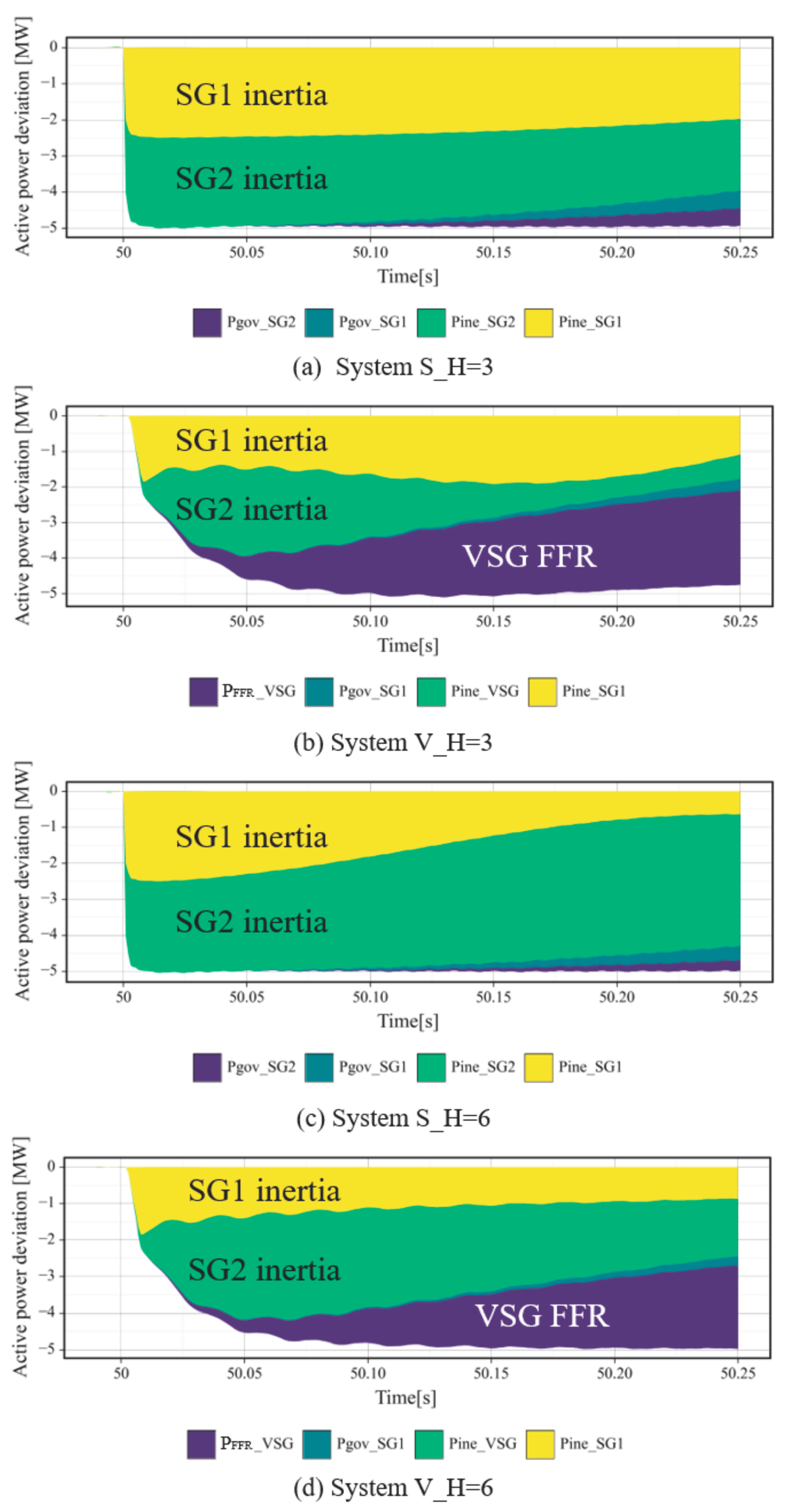
4.3. Active Power Variation Evaluation Method
4.4. Case Settings
5. Results and Analysis
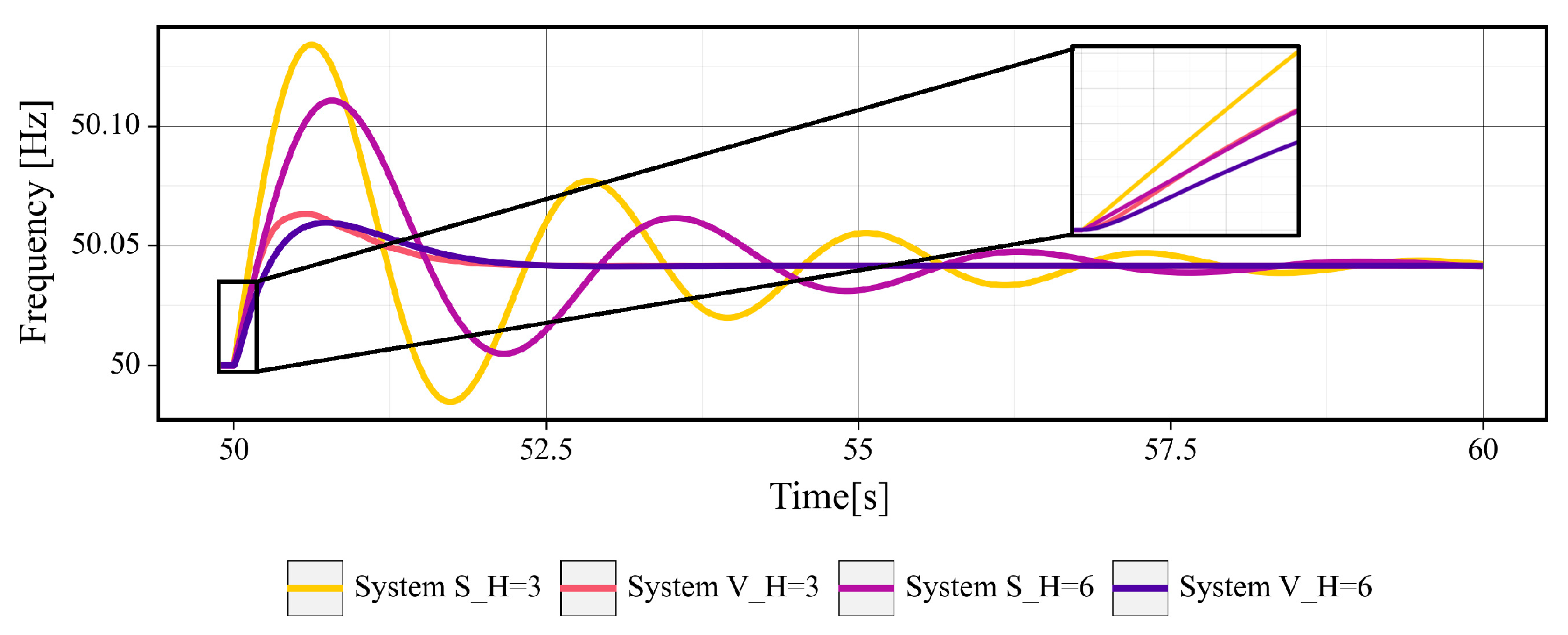
5.1. Larger EI than the Set Inertia Parameter (Study 1)
5.2. EI Sensitivity Analysis of the Set Parameters (Study 2)
5.3. EI Sensitivity Analysis of the Capacity Ratio (Study 3)
5.4. Toward Evaluating Effective Inertia in Real Power Systems
6. Conclusions
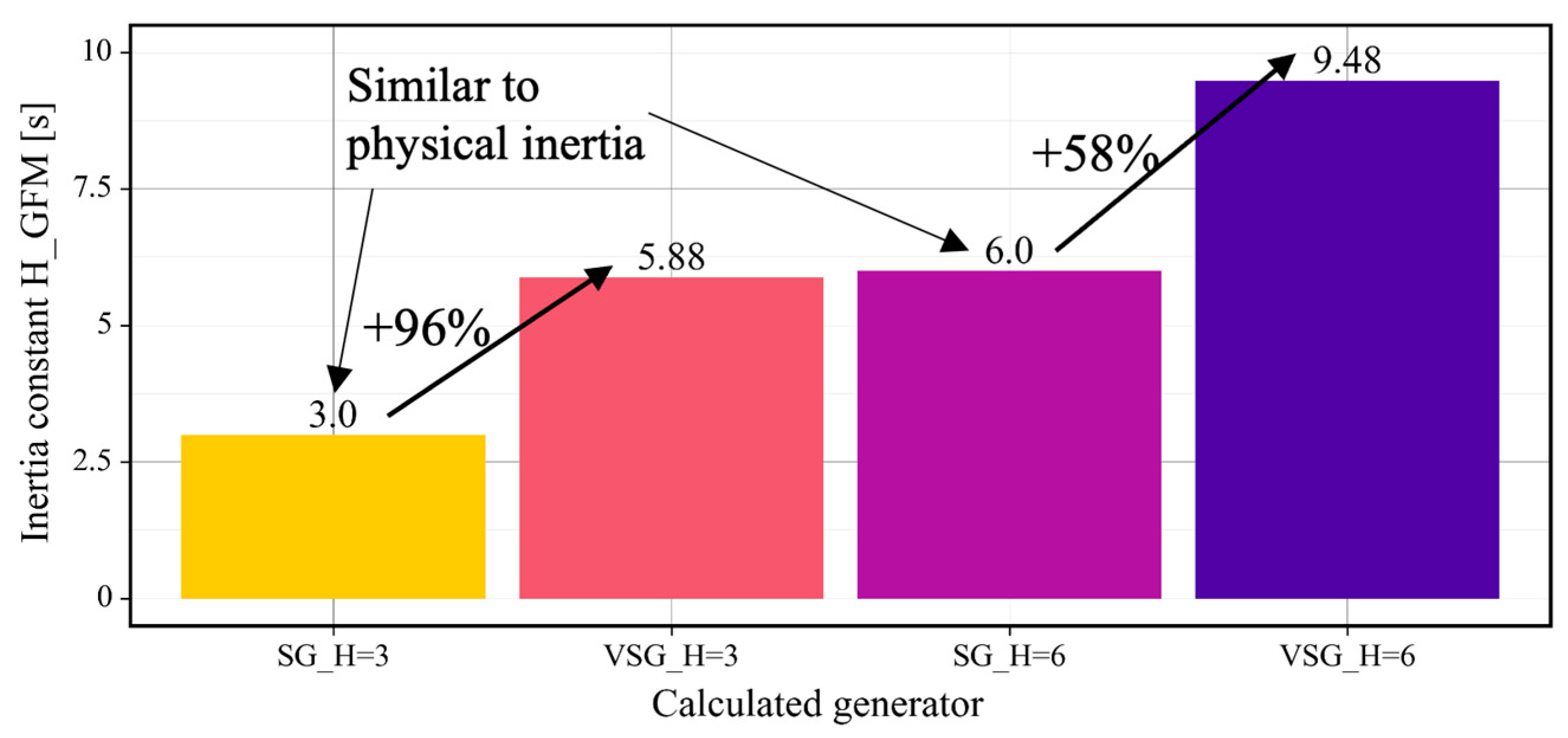
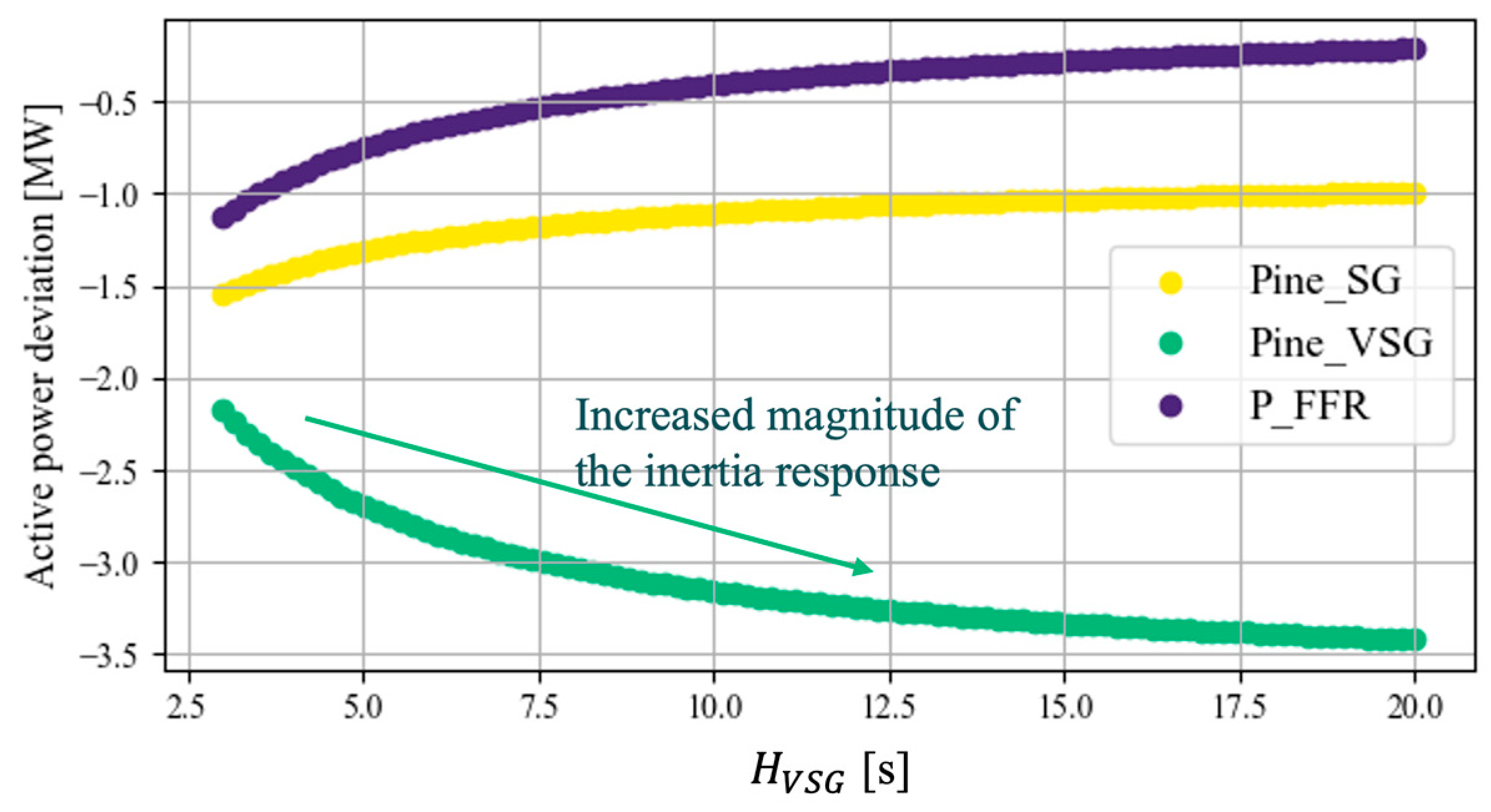
- After the disturbance in the inertia-time domain, the FFR of the VSG suppressed the inertia response of the SG, increasing the EI of the VSG beyond its set inertia parameter. The traditional method for analyzing the relationship between the physical inertia of SGs and the ROCOF does not consider the FFR. Under certain conditions, the EI of the VSG increased from the set inertia parameter by 96%.
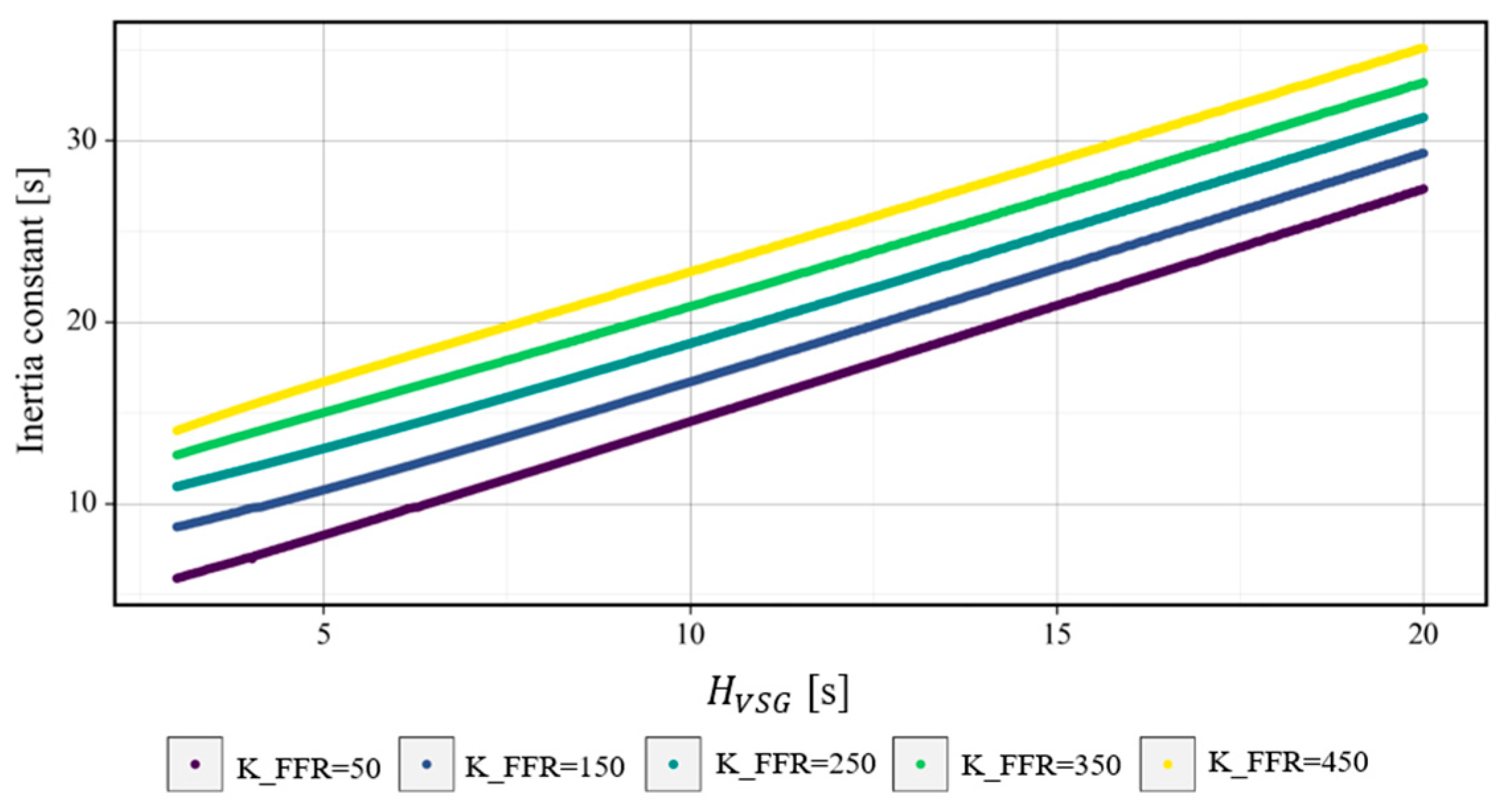
- The EI of the VSG varied nearly linearly with the set parameters of and , with the sensitivity to being significantly higher than that to . Nevertheless, both and were found to be crucial for EI assessment, as demonstrated by the notable impact of in the FFR sensitivity analysis.
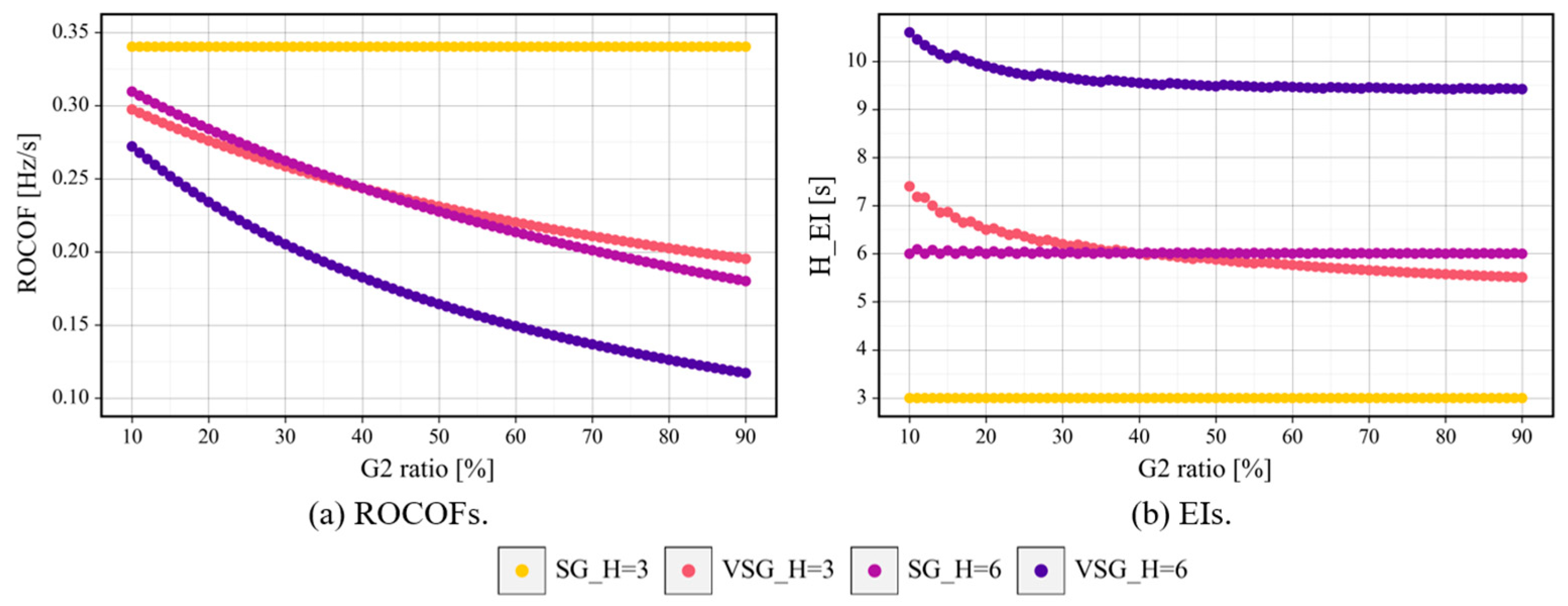
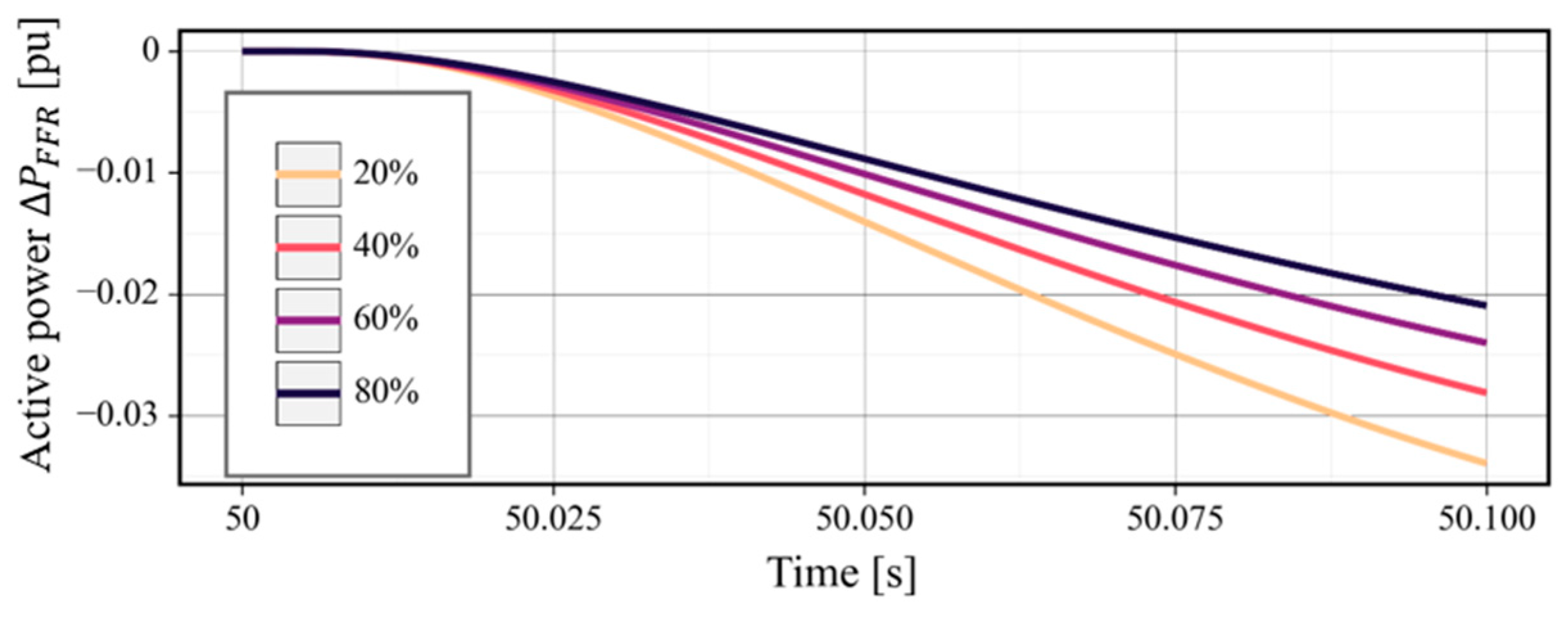
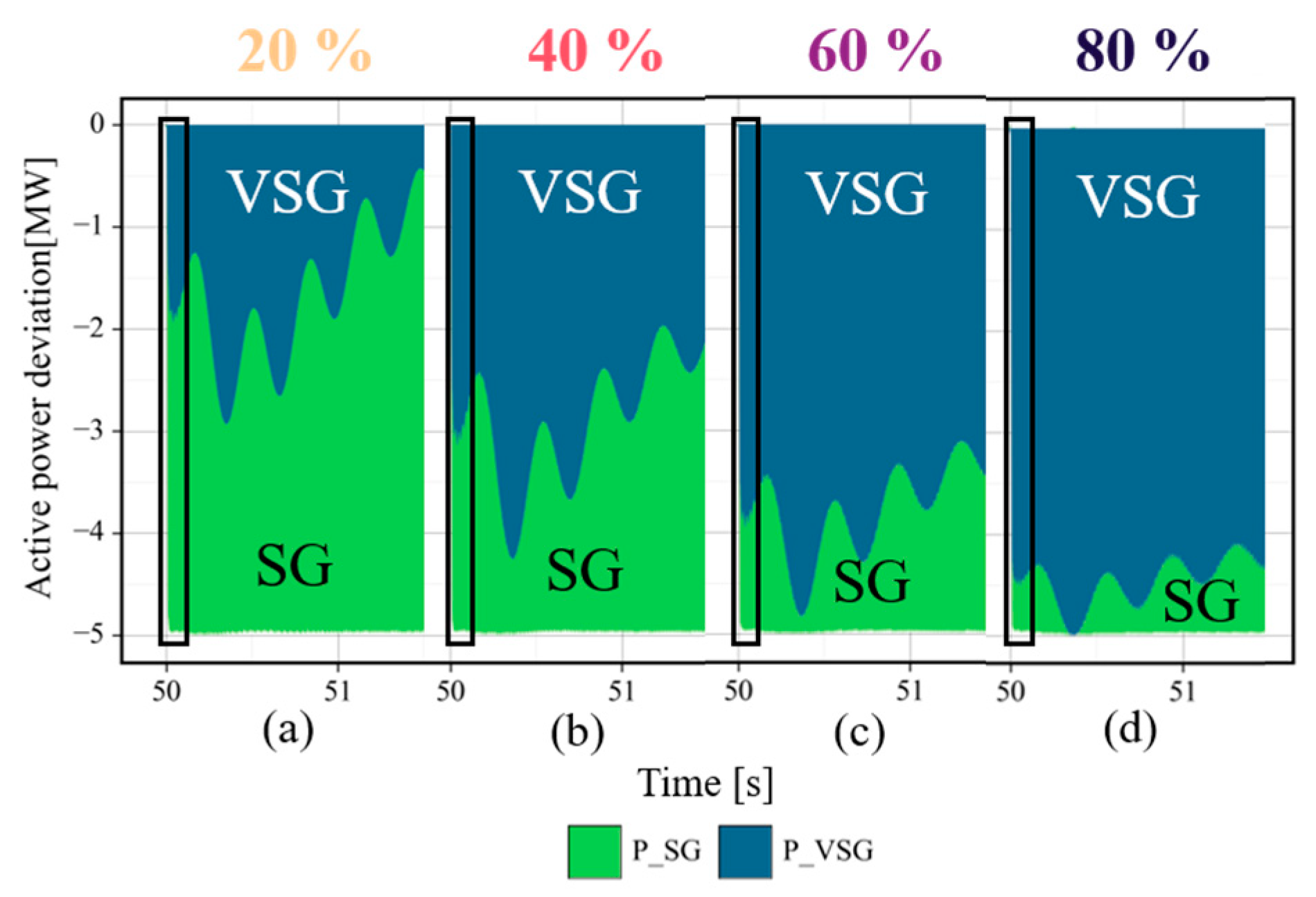
- The EI of the VSG decreased as the VSG’s capacity ratio increased relative to the total generation capacity. This resulted from the change in the per-unit FFR owing to the change in the synchronous power coefficients and initial sharing ratio between the generators immediately after the disturbance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
Appendix A
References
- Milano, F.; Dörfler, F.; Hug, G.; Hill, D.J.; Verbič, G. Foundations and challenges of low-inertia systems (invited paper). In Proceedings of the Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–25. [Google Scholar]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Definition and classification of power system stability—Revisited & extended. IEEE Trans. Power Syst. 2021, 36, 3271–3281. [Google Scholar]
- Protection & Dyn. Sub Group. Frequency Measurement Requirements and Usage. Available online: https://eepublicdownloads.entsoe.eu/clean-documents/SOC%20documents/Regional_Groups_Continental_Europe/2018/TF_Freq_Meas_v7.pdf (accessed on 1 November 2023).
- Driesen, J.; Visscher, K. Virtual synchronous generators. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Li, D.; Zhu, Q.; Lin, S.; Bian, X.Y. A self-adaptive inertia and damping combination control of VSG to support frequency stability. IEEE Trans. Energy Convers. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Mijatovic, N.; Dragicevic, T. Frequency stability assessment of grid-Forming VSG in framework of MPME with feedforward decoupling control strategy. IEEE Trans. Ind. Electron. 2022, 69, 6903–6913. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Zhang, X.; Lu, J.; Wang, P.; Guerrero, J.M. Improvement of frequency regulation in VSG-based AC microgrid via adaptive virtual inertia. IEEE Trans. Power Electron. 2020, 35, 1589–1602. [Google Scholar] [CrossRef]
- Yao, F.; Zhao, J.; Li, X.; Mao, L.; Qu, K. RBF neural network based virtual synchronous generator control with improved frequency stability. IEEE Trans. Ind. Inform. 2021, 17, 4014–4024. [Google Scholar] [CrossRef]
- Fini, M.H.; Golshan, M.E.H. Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables. Electr. Power Syst. Res. 2018, 154, 13–22. [Google Scholar] [CrossRef]
- Orihara, D.; Kikusato, H.; Hashimoto, J.; Otani, K.; Takamatsu, T.; Oozeki, T.; Taoka, H.; Matsuura, T.; Miyazaki, S.; Hamada, H.; et al. Contribution of voltage support function to virtual inertia control performance of inverter-based resource in frequency stability. Energies 2021, 14, 4220. [Google Scholar] [CrossRef]
- Tayyebi, A.; Groß, D.; Anta, A.; Kupzog, F.; Dörfler, F. Frequency stability of synchronous machines and grid-forming power converters. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 8, 1004–1018. [Google Scholar] [CrossRef]
- Mohamad, A.M.E.I.; Mohamed, H.R.A.; Mohamed, Y.A.-R.I. Impedance-Based Stability Analysis of a Low-Inertia AC Grid Connected to a DC Grid by a VSC with Virtual Inertia Controllers. IEEE Open J. Power Electron. 2025, 1–18. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Aragon, D.A.; Unamuno, E.; Ceballos, S.; Barrena, J.A. Comparative small-signal evaluation of advanced grid-forming control techniques. Electr. Power Syst. Res. 2022, 211, 108154. [Google Scholar] [CrossRef]
- Luo, J.; Teng, F.; Bu, S. Stability-Constrained Power System Scheduling: A Review. IEEE Access 2020, 8, 219331–219343. [Google Scholar]
- Tayyebi, A.; Dörfler, F.; Kupzog, F.; Miletic, Z.; Hribernik, W. Grid-forming converters-inevitability control strategies and challenges in future grids application. In Proceedings of the CIRED Workshop, Ljubljana, Slovenia, 7–8 June 2018. [Google Scholar]
- Hirase, Y.; Sugimoto, K.; Sakimoto, K.; Ise, T. Analysis of resonance in microgrids and effects of system frequency stabilization using a virtual synchronous generator. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1287–1298. [Google Scholar]
- Tuttelberg, K.; Kilter, J.; Wilson, D.; Uhlen, K. Estimation of Power System Inertia from Ambient Wide Area Measurements. IEEE Trans. Power Syst. 2018, 33, 7249–7257. [Google Scholar]
- Dhara, P.K.; Rather, Z.H.; Phurailatpam, C. Estimation of Minimum Inertia and Fast Frequency Support for Renewable Energy Dominated Power Systems. IEEE Trans. Instrum. Meas. 2025, 74, 1–14. [Google Scholar]
- Ruan, Y.; Yao, W.; Zong, Q.; Zhou, H.; Gan, W.; Zhang, X.; Li, S.; Wen, J. Online Assessment of Frequency Support Capability of the DFIG-Based Wind Farm Using a Knowledge and Data-Driven Fusion Koopman Method. Appl. Energy 2025, 377, 124518. [Google Scholar]
- Hua, W.; Li, D.; Mi, Y. Power System Inertia Estimation during Normal Operation Using Adaptive Ensemble Empirical Mode Decomposition. Electr. Power Syst. Res. 2025, 241, 111305. [Google Scholar] [CrossRef]
- Im, S.; Park, J.; Lee, K.; Son, Y.; Lee, B. Estimation of Quantitative Inertia Requirement Based on Effective Inertia Using Historical Operation Data of South Korea Power System. Sustainability 2024, 16, 10555. [Google Scholar] [CrossRef]
- Jiang, B.; Guo, C.; Chen, Z. Frequency Constrained Dispatch with Energy Reserve and Virtual Inertia from Wind Turbines. IEEE Trans. Sustain. Energy 2025, 16, 1340–1355. [Google Scholar]
- Zhang, H.; Liao, K.; Yang, J.; Zheng, S.; He, Z. Frequency-Constrained Expansion Planning for Wind and Photovoltaic Power in Wind-Photovoltaic-Hydro-Thermal Multi-Power System. Appl. Energy 2024, 356, 122401. [Google Scholar]
- Imgart, P.; Chen, P. Effective Inertia Constant: A Frequency-Strength Indicator For Converter-Dominated Power Grids. In Proceedings of the 2023 IEEE Belgrade PowerTech, Belgrade, Serbia, 25–28 June 2023; pp. 1–6. [Google Scholar]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Improvement of transient response in microgrids using virtual inertia. IEEE Trans. Power Deliv. 2013, 28, 1830–1838. [Google Scholar]
- Shobug, M.A.; Chowdhury, N.; Hossain, M.A.; Sanjari, M.J.; Lu, J.; Yang, F. Virtual Inertia Control for Power Electronics-Integrated Power Systems: Challenges and Prospects. Energies 2024, 17, 2737. [Google Scholar] [CrossRef]
- Sati, S.E.; Al-Durra, A.; Zeineldin, H.; EL-Fouly, T.H.M.; El-Saadany, E.F. A Novel Virtual Inertia-Based Damping Stabilizer for Frequency Control Enhancement for Islanded Microgrid. Int. J. Electr. Power Energy Syst. 2024, 155, 109580. [Google Scholar]
- Norouzi, M.H.; Oshnoei, A.; Mohammadi-Ivatloo, B.; Abapour, M. Learning-Based Virtual Inertia Control of an Islanded Microgrid with High Participation of Renewable Energy Resources. IEEE Syst. J. 2024, 18, 786–795. [Google Scholar]
- Gurski, E.; Kuiava, R.; Perez, F.; Benedito, R.A.S.; Damm, G. A Novel VSG with Adaptive Virtual Inertia and Adaptive Damping Coefficient to Improve Transient Frequency Response of Microgrids. Energies 2024, 17, 4370. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Education, Inc.: New York, NY, USA, 1994; pp. 581–582. [Google Scholar]
- D’Arco, S.; Suul, J.A. Virtual synchronous machines—Classification of implementations and analysis of equivalence to droop controllers for microgrids. In Proceedings of the IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability, 2nd ed.; IEEE Press: Piscataway, NJ, USA, 2003; pp. 13–52, 83–148. [Google Scholar]
- Institution of Electrical Engineering in Japan. Japanese Power System Model. Available online: http://www.iee.or.jp/pes/model/english/ (accessed on 27 January 2025).
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar]
- Mo, O. Average Model of PWM Converter; Project Memo SINTEF/12X127.02; SINTEF: Trondheim, Norway, 2003; Available online: https://www.sintef.no/globalassets/project/powerelectronics/slideshow-an0312103.pdf (accessed on 27 January 2025).
- Shikuma, R.; Orihara, D.; Kikusato, H.; Taoka, H.; Kaneko, A.; Hayashi, Y. Quantitative Effect of the Inertia Emulation Block of Grid-Forming Inverters on Frequency Stability. In Proceedings of the 2023 IEEE Belgrade PowerTech, Belgrade, Serbia, 25–28 June 2023; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study # | Varied Parameters | Fixed Parameters |
|---|---|---|
| Study 2 | VSG parameters | G2 ratio (50%) |
| Study 3 | G2 ratio | Generator parameters (Table 2) |
| System | Generator | [s] | [p.u.] | [s] |
|---|---|---|---|---|
| System S ) | SG1 | 3.0 | 50 | 1.0 |
| SG2 | 3.0 | 50 | 1.0 | |
| System V ) | SG1 | 3.0 | 50 | 1.0 |
| VSG | 3.0 | 50 | - | |
| System S ) | SG1 | 3.0 | 50 | 1.0 |
| SG2 | 6.0 | 50 | 1.0 | |
| System V ) | SG1 | 3.0 | 50 | 1.0 |
| VSG | 6.0 | 50 | - |
| Metrics | System S (H = 3) | System V (H = 3) | System S (H = 6) | System V (H = 6) |
|---|---|---|---|---|
| ROCOF [Hz/s] | 0.340 | 0.231 | 0.228 | 0.164 |
| EI of G2 [s] | 3.00 | 5.88 | 6.00 | 9.48 |
| EI of G2 [s] | 3.05 | 2.97 | 6.06 | 7.29 |
| EI of G2 [s] | 2.98 | 5.75 | 6.15 | 8.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shikuma, R.; Orihara, D.; Kikusato, H.; Kaneko, A.; Taoka, H.; Hayashi, Y. Quantitative Difference Between the Effective Inertia and Set Inertia Parameter of Virtual Synchronous Generators. Energies 2025, 18, 1683. https://doi.org/10.3390/en18071683
Shikuma R, Orihara D, Kikusato H, Kaneko A, Taoka H, Hayashi Y. Quantitative Difference Between the Effective Inertia and Set Inertia Parameter of Virtual Synchronous Generators. Energies. 2025; 18(7):1683. https://doi.org/10.3390/en18071683
Chicago/Turabian StyleShikuma, Ryosuke, Dai Orihara, Hiroshi Kikusato, Akihisa Kaneko, Hisao Taoka, and Yasuhiro Hayashi. 2025. "Quantitative Difference Between the Effective Inertia and Set Inertia Parameter of Virtual Synchronous Generators" Energies 18, no. 7: 1683. https://doi.org/10.3390/en18071683
APA StyleShikuma, R., Orihara, D., Kikusato, H., Kaneko, A., Taoka, H., & Hayashi, Y. (2025). Quantitative Difference Between the Effective Inertia and Set Inertia Parameter of Virtual Synchronous Generators. Energies, 18(7), 1683. https://doi.org/10.3390/en18071683