
Acoustic Identification Method of Partial Discharge in GIS Based on Improved MFCC and DBO-RF


Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Setup
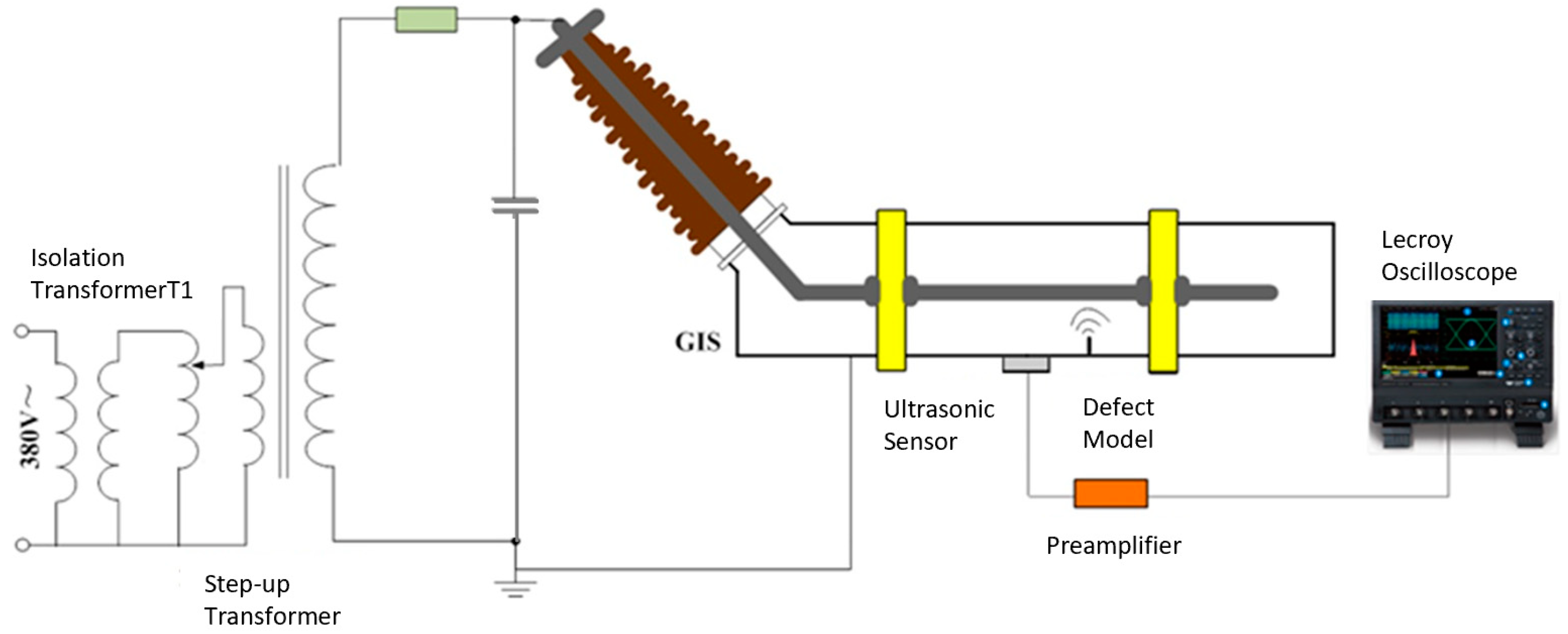
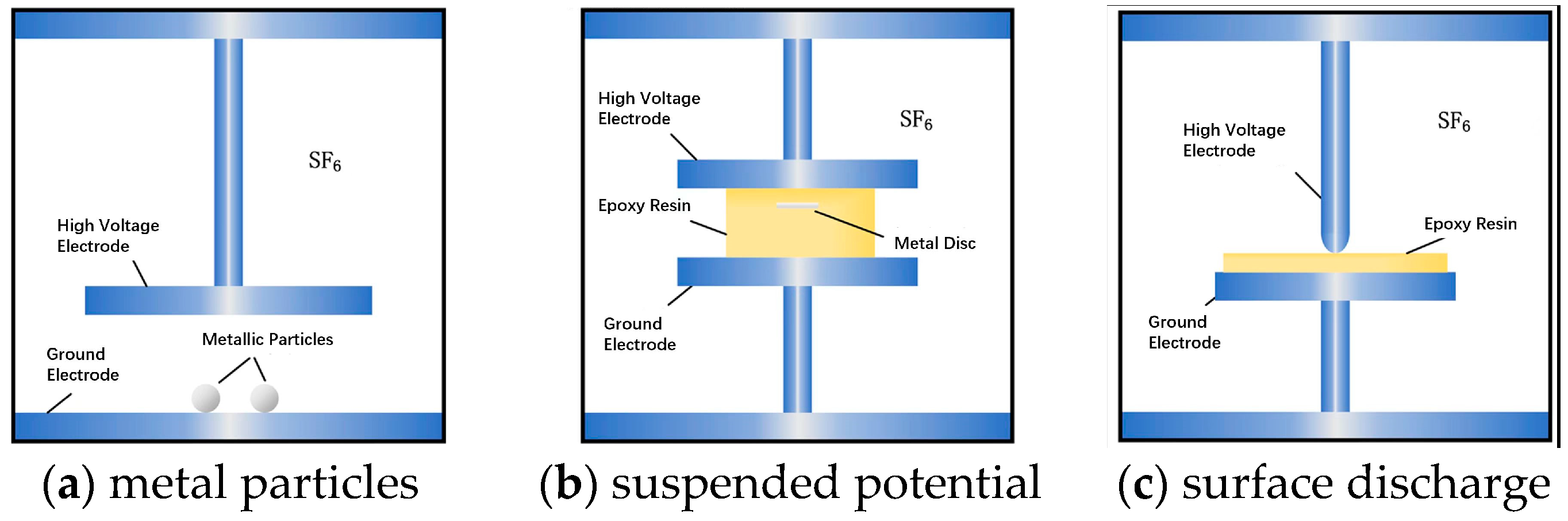
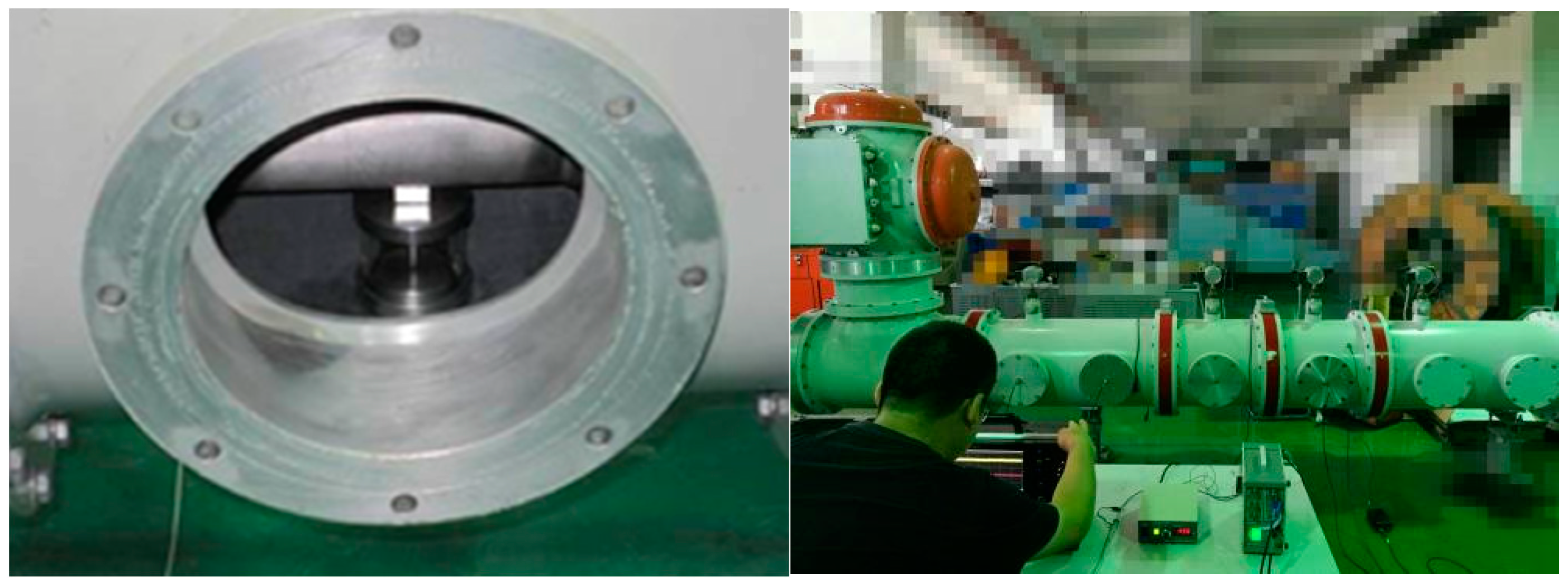
2.1.1. GIS Partial Discharge Test Platform and Defect Models
2.1.2. Experimental Method
2.2. GIS Partial Discharge Acoustic Identification Method
2.2.1. Wavelet Denoising
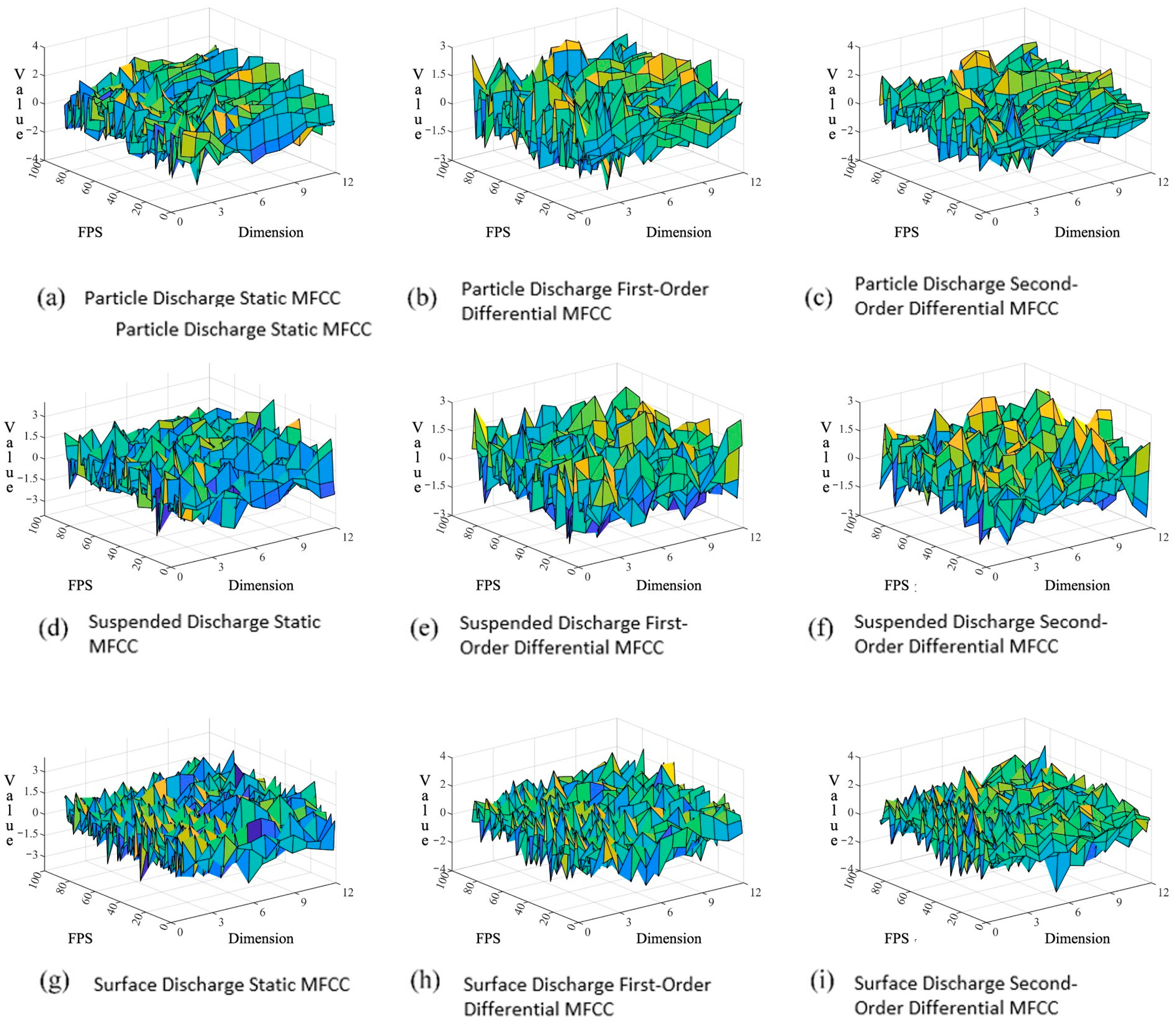
2.2.2. Improved MFCC Feature Parameter Extraction
2.2.3. Principal Component Analysis
- (1)
- For a matrix A of n m-dimensional feature parameters, it can be expressed as:
- (2)
- Calculate the covariance matrix. The n-dimensional correlation matrix of A can be expressed as:
- (3)
- Calculate the eigenvalues of the covariance matrix R and their corresponding unit eigenvectors .
- (4)
- Sort the eigenvalues from largest to smallest, and arrange the eigenvectors in the same order. Calculate the contribution rate and cumulative contribution rate of each principal component based on the eigenvalues, which can be expressed as:
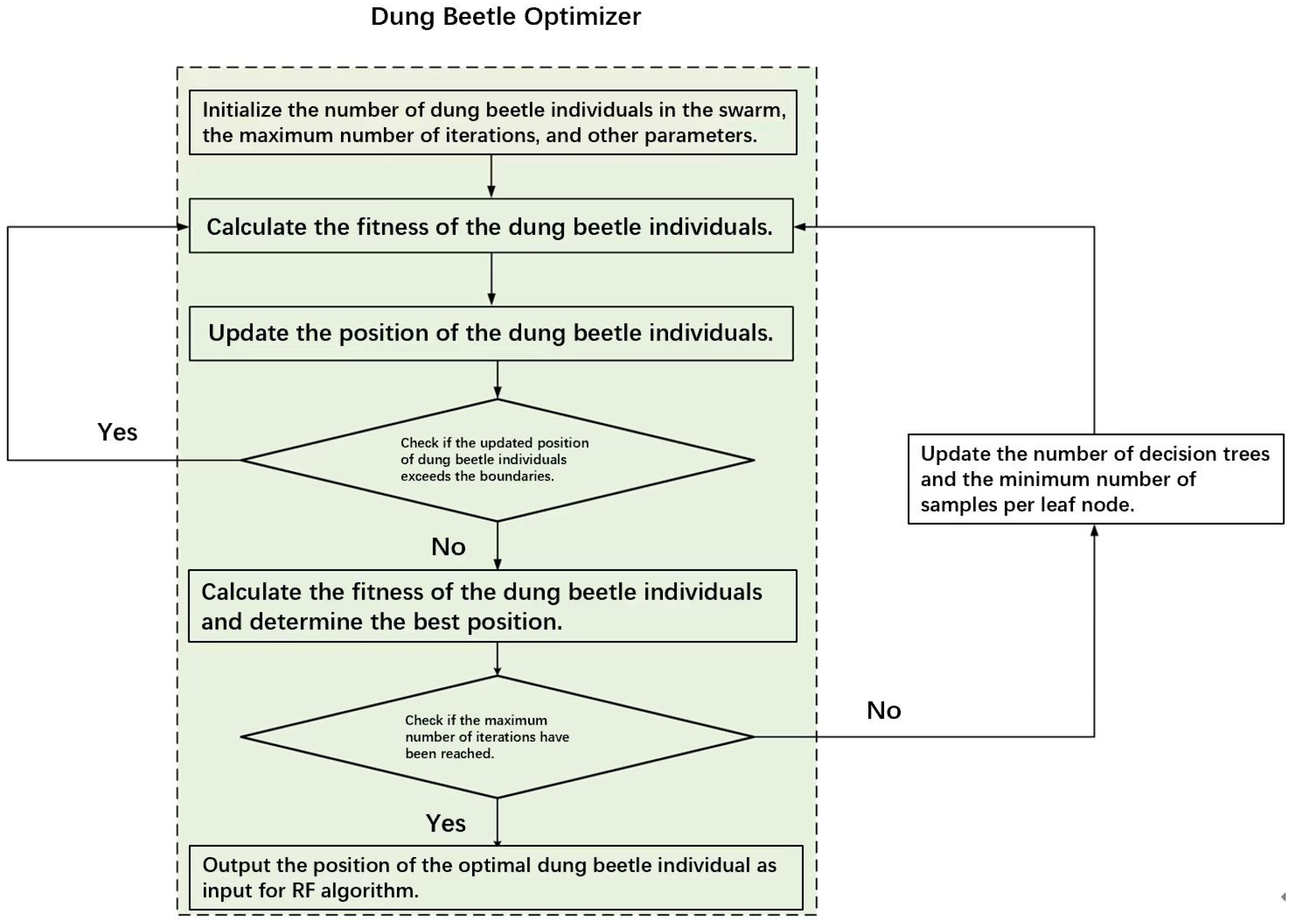
2.2.4. Dung Beetle Algorithm Optimized Random Forest Recognition Method
Dung Beetle Algorithm
- (1)
- Rolling Behavior
- (2)
- Breeding Behavior
- (3)
- Foraging Behavior
- (4)
- Stealing Behavior
Random Forest Algorithm
- (1)
- Randomly sample the dataset D with replacement to form K training sample sets ;
- (2)
- Divide the nodes to construct decision tree T(k), randomly select p features to split leaf nodes, and construct decision tree T(k) based on the minimum Gini index. The calculation method of the Gini index is:
- (3)
- After K rounds of training, obtain a classification model with K decision trees s1(x), s2(x),…, sk(x), and choose the maximum number of votes as the final recognition result, which can be expressed as:
3. Results
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qiu, Y. GIS Devices and Insulation Technology; Xi’an Jiaotong University: Xi’an, China, 2007. [Google Scholar]
- Gao, S.; Wang, C.; Li, F. Online Monitoring and Fault Diagnosis of Power Equipment; Tsinghua University: Beijing, China, 2018. [Google Scholar]
- Zhang, S. Intelligent Diagnosis Method for Discharge Fault Mode of High Voltage SF6 Gas Insulated Switchgear. High Volt. Eng. 2020, 46, 432–440. [Google Scholar]
- CIGRE Working Group 33/32-12. Insulation Co-ordination of GIS: Return of Experience, on Site Tests and Diagnostic techniques. Electra 1998, 176, 67–95. [Google Scholar]
- Schichler, U.; Koltunowicz, W.; Endo, F.; Feser, K.; Giboulet, A.; Girodet, A.; Hama, H.; Hampton, B.; Kranz, H.G.; Lopez-Roldan, J.; et al. Risk assessment on defects in GIS based on PD diagnostics. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2165–2172. [Google Scholar] [CrossRef]
- Li, J.; Zhao, X.; Yang, J. Partial discharge measurement and analysis of typical defects in GIS. High Volt. Eng. 2009, 35, 2440–2445. [Google Scholar]
- Chen, Y.; Chang, D.; Yang, D.; Zhang, G. PD creeping discharge development process induced by metallic particles in GIS. Electr. Power Eng. Technol. 2021, 40, 153–158. [Google Scholar]
- Luo, L.; Yao, W.; Wang, J. Study on SF6 decomposition gas for partial discharge diagnosis in GIS. Power Syst. Technol. 2010, 34, 225–230. [Google Scholar]
- Li, D.; Liang, J.; Bu, K. Ultrasonic detection of Partial Discharge of Typical Defects in GIS. High Volt. Appar. 2009, 45, 72–75. [Google Scholar]
- Chen, F.; Tang, H.Z.; Li, H.G. Application of on-line ultrasonic and UHF partial discharge detection in 1000kV GIS. Appl. Mech. Mater. 2014, 644, 3480–3484. [Google Scholar] [CrossRef]
- Wang, T.; Ding, H.; Zhang, Z. A partial discharge pattern recognition method based on deep learning and multi-model fusion. Electr. Power Eng. Technol. 2023, 42, 188–195. [Google Scholar]
- Han, S.; Lv, Z.; Sui, H. Partial discharge pattern recognition in GIS based on EFPI sensor. Electr. Power Eng. Technol. 2022, 41, 149–155. [Google Scholar]
- Gao, W.; Ding, D.; Liu, W. Research on the typical partial discharge using the UHF detection method for GIS. IEEE Trans. Power Deliv. 2011, 26, 2621–2629. [Google Scholar]
- Xu, Y.; Liu, W.; Chen, W. Motion Characteristics and Partial Discharge Characteristics of Sub-millimeter Metal Particles on the Surface of AC GIS Spacer. Proc. CSEE 2019, 39, 4315–4324+4334. [Google Scholar]
- Luo, S.; Tian, Y.; Li, B.; Hu, Y.; Li, Q. Pattern recognition of ultra-high frequency partial discharge by using scale parameters-energy entropy characteristic pairs. Electr. Power Eng. Technol. 2019, 38, 152–158. [Google Scholar]
- Luo, Y.; Qi, B.; Chen, W. Study on Optical Detection Method of the Surface Weak Discharge of GIS Basin Insulator. Power Syst. Technol. 2024, 48, 4377–4386. Available online: http://kns.cnki.net/kcms/detail/11.2410.tm.20240425.1737.005.html (accessed on 12 September 2024).
- Han, X.; Liu, Z.; Li, J. Study on PD Detection Method in GIS Based on the Optical and UHF Integrated Sensor. Proc. CSEE 2018, 38, 6760–6769. [Google Scholar]
- Hu, Z.; Li, Z.; Chen, H. Transformer state detection and assessment method based on voiceprint compression and cost-sensitive techniques. Electr. Power Eng. Technol. 2024, 43, 209–216. [Google Scholar]
- Lawson, A.; Vabishchevich, P.; Huggins, M.; Ardis, P.; Battles, B.; Stauffer, A. Survey and evaluation of acoustic features for speaker recognition. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 5444–5447. [Google Scholar]
- Wang, R.; Li, R.; Chen, D. Sound recognition in low signal-to-noise ratio traffic environment based on improved wavelet packet denoising and Mel-cephalogram coefficients. Sci. Technol. Eng. 2019, 19, 290–295. [Google Scholar]
- Logan, B. Mel frequency cepstral coefficients for music modeling. Ismir 2000, 270, 11. [Google Scholar]
- Lv, X.; Wang, H. Abnormal sound recognition algorithm based on MFCC and short-time energy mixing. J. Comput. Appl. 2010, 30, 796–798. [Google Scholar]
- Zhao, H.; Cong, P.; Li, C.; Qu, D.; Wei, H. GIS mechanical fault detection method based on vector space state optimization. High Volt. Appar. 2024, 60, 65–72. [Google Scholar]
- Lu, Y.; Liao, C.; Li, Q.; Wang, T.; Shao, J.; Zhang, Y. Transformer fault diagnosis method based on voiceprint feature and ensemble learning. Electr. Power Eng. Technol. 2023, 42, 46–55. [Google Scholar]
- Zhuang, X.; Li, Q.; Liu, Z.; Zhang, L.; Ji, T.; Zhang, C. GIS abnormal working condition voiceprint recognition algorithm based on improved MFCC-OCSVM and Bayesian optimized BiGRU. Power Syst. Technol. South. Power Syst. Technol. 2025, 19, 30–40. Available online: http://kns.cnki.net/kcms/detail/44.1643.tk.20240625.0913.018.html (accessed on 12 September 2024).
- Xu, M.; Li, Z.; Sun, H. GIS mechanical fault diagnosis method based on improved Mel-frequency cepstral coefficients. High Volt. Appar. 2020, 56, 122–128. [Google Scholar]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Parameters | Recognition Accuracy |
|---|---|
| Static MFCC | 91.2% |
| First-order Differential MFCC | 84.5% |
| Second-order Differential MFCC | 82.4% |
| Static + Dynamic MFCC | 90.5% |
| Static + Dynamic MFCC + PCA | 92.2% |
| Algorithm Type | Recognition Accuracy |
|---|---|
| RF | 90.7% |
| SVM | 90.8% |
| KNN | 89.6% |
| DBO-RF | 92.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Hu, C.; Yang, J.; Liu, Z.; Wang, Z.; Liu, Z.; Zang, Y. Acoustic Identification Method of Partial Discharge in GIS Based on Improved MFCC and DBO-RF. Energies 2025, 18, 1619. https://doi.org/10.3390/en18071619
Zhu X, Hu C, Yang J, Liu Z, Wang Z, Liu Z, Zang Y. Acoustic Identification Method of Partial Discharge in GIS Based on Improved MFCC and DBO-RF. Energies. 2025; 18(7):1619. https://doi.org/10.3390/en18071619
Chicago/Turabian StyleZhu, Xueqiong, Chengbo Hu, Jinggang Yang, Ziquan Liu, Zhen Wang, Zheng Liu, and Yiming Zang. 2025. "Acoustic Identification Method of Partial Discharge in GIS Based on Improved MFCC and DBO-RF" Energies 18, no. 7: 1619. https://doi.org/10.3390/en18071619
APA StyleZhu, X., Hu, C., Yang, J., Liu, Z., Wang, Z., Liu, Z., & Zang, Y. (2025). Acoustic Identification Method of Partial Discharge in GIS Based on Improved MFCC and DBO-RF. Energies, 18(7), 1619. https://doi.org/10.3390/en18071619