

Computationally Efficient and Loss-Minimizing Model Predictive Control for Induction Motors in Electric Vehicle Applications

 , , and
, , and
Abstract
1. Introduction
- Coherent motor model throughout the entire optimization frameworkTo maintain a consistent optimization framework, the proposed methodology employs a unified Induction Motor (IM) model for both loss reduction and Model Predictive Control (MPC) discretization. Although previous work [26] integrates MPC with a loss-minimizing strategy, the IM models for control and loss minimization often differ, resulting in potential model mismatches.
- Polynomial-based flux optimization without additional online computationWhereas existing MPC-based loss minimization strategies frequently solve the optimization problem in real time—thereby adding substantial computational overhead [20,25,26]—the present approach introduces a precomputed polynomial-based flux reference. This permits loss minimization to be performed without incurring extra online computation, effectively reducing the controller’s real-time workload and ensuring feasibility for fast sample periods.
- Symmetrical voltage-vector selection for torque ripple reductionIn classical Finite Control Set (FCS)–MPC, a single voltage vector is maintained throughout each sampling interval. In contrast, this study adopts a novel symmetrical three-vector sequence, which diminishes torque ripple and current distortion without unnecessarily increasing the switching frequency. Unlike conventional three-vector strategies, which can significantly increase switching frequency, this symmetrical sequence maintains a low switching-event count. Notably, none of the loss-minimizing MPC methods cited in [24,25,26] implement an explicit torque ripple reduction mechanism within the control framework.
- Explicit validation in urban EV applicationsAlthough many studies focus on drive efficiency at fixed speeds or under purely transient conditions [24,25,26], rigorous testing under representative urban driving cycles remains less common [27]. By employing the ECE-15 and WLTP-Urban cycles, the proposed innovative control framework reduces total electric losses (copper and iron) while achieving substantially smoother torque production compared to classical predictive torque control in urban conditions. These improvements are particularly beneficial for increasing driving range in environments characterized by frequent acceleration and deceleration.
2. Methodology
2.1. Induction Motor Modeling and Minimization of Total Losses in Steady State
2.1.1. Induction Motor Model
2.1.2. Mechanical System and Total Electric Losses for the Induction Motor
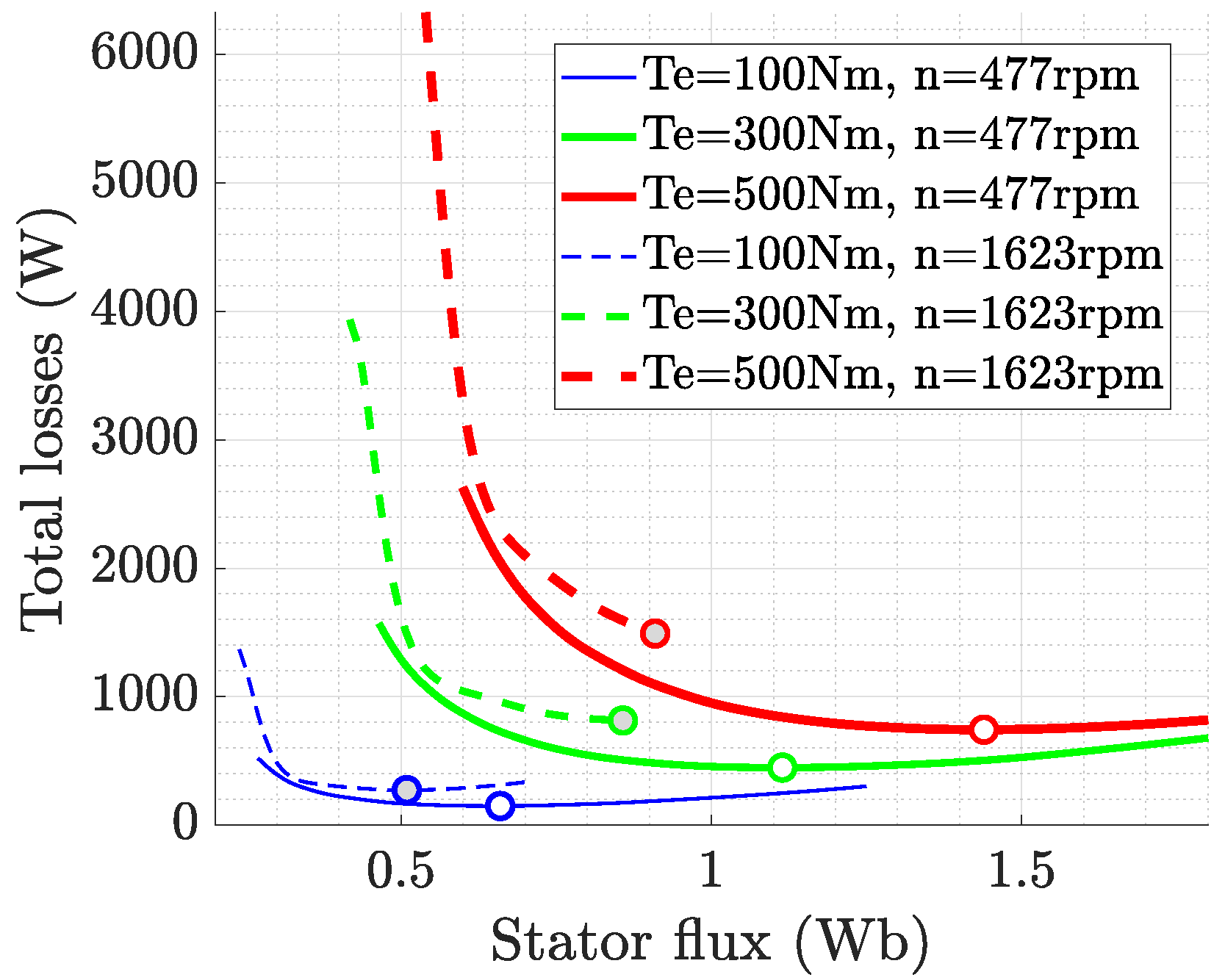
2.1.3. Total Loss Minimization for a Given Operating Point
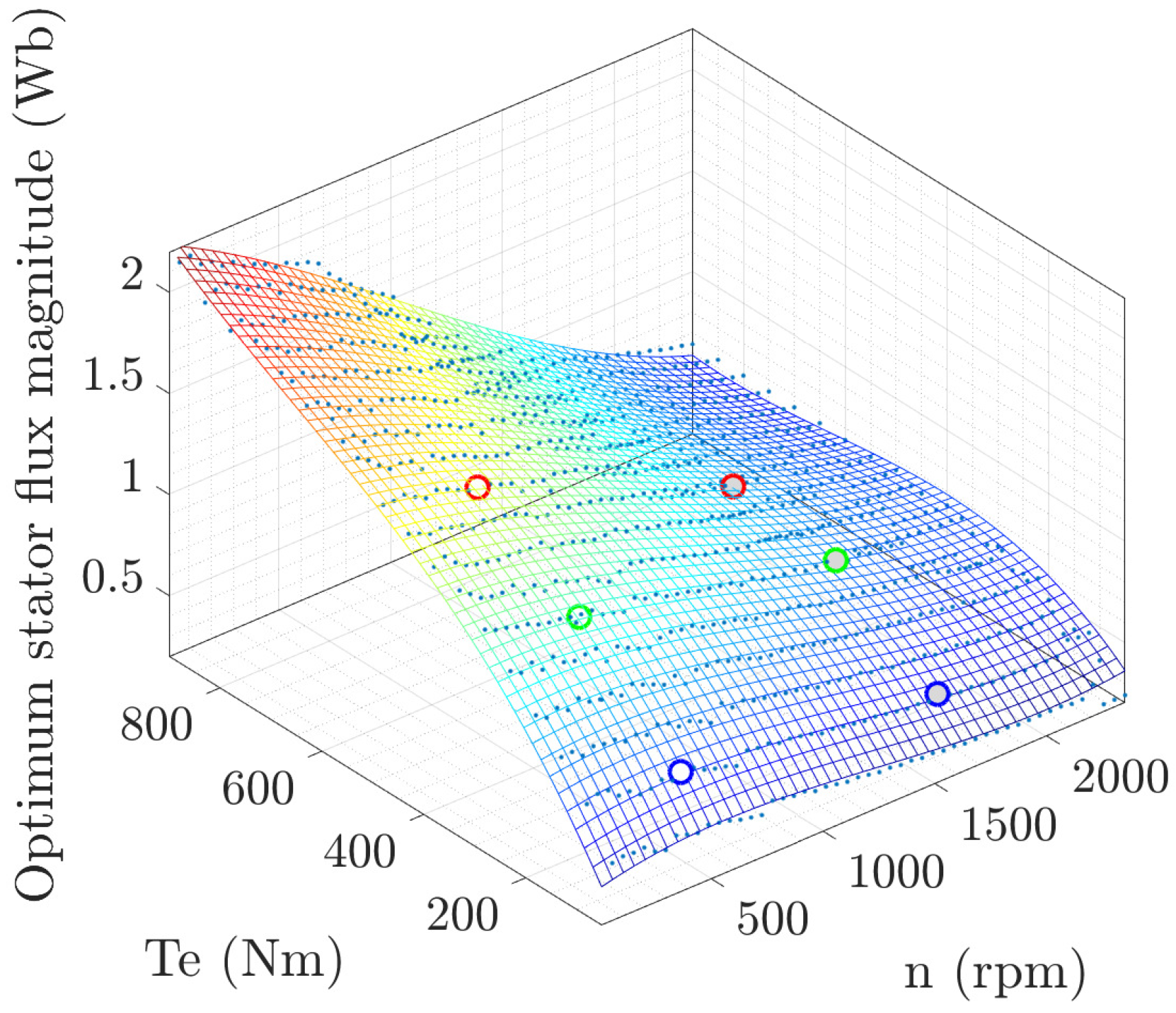
2.1.4. Optimum Stator Flux for a Given Rotor Speed and Electromagnetic Torque
2.2. Model Predictive Control Strategy
2.2.1. Induction Motor Model Discretization
2.2.2. MPC Using Iron Loss Model
2.2.3. Control Vector Strategy
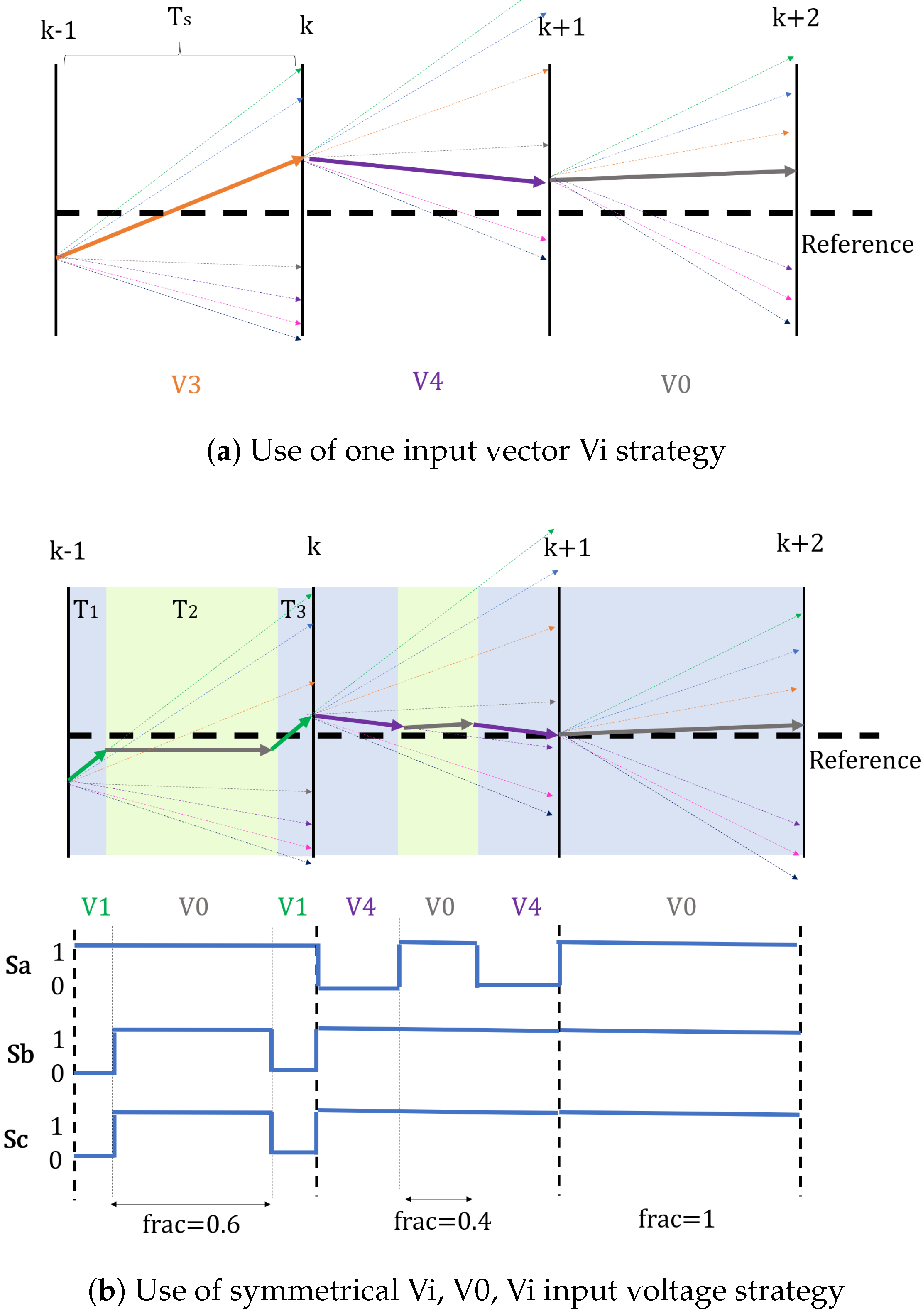
- Strategy: This input strategy considers the effect of selecting each input voltage vector (–) on the output variables (electromagnetic torque and stator flux) and on maintaining the selected vector during the sample time . The input voltage is chosen based on the vector that provides a value closest to the reference output variable. This process is graphically illustrated for the stator flux in Figure 9a.
- Strategy: This strategy involves commanding a three-voltage symmetric vector sequence () instead of a single . Consequently, the controller not only selects among the seven possible discrete voltage options for but also determines the proportion of the sample time during which the vectors and are applied. This is achieved using a discrete variable called frac.The total sample time is divided into three distinct intervals: , , and , defined based on the variable frac, as shown in Equations (25) and (26):After performing a cost–reward analysis in terms of computational efficiency, the possible discrete values for are set to 0, 0.2, 0.4, 0.6, 0.8, and 1. The effect of the selected input voltage combination on the output variables is considered at three points during a sample time instead of one point. The combination of input vectors and the values of the variable selected at each provide values for the output variable closest to the reference. This process is performed by considering the predicted values for the output variable during (, , and ) instead of just at the end of . This process is graphically explained for the stator flux in Figure 9b. A symmetrical strategy allows three different voltage vectors to be applied during a time sample with just one inverter leg command per by commanding an appropriate duty cycle (see the inverter leg commands in Figure 9b).
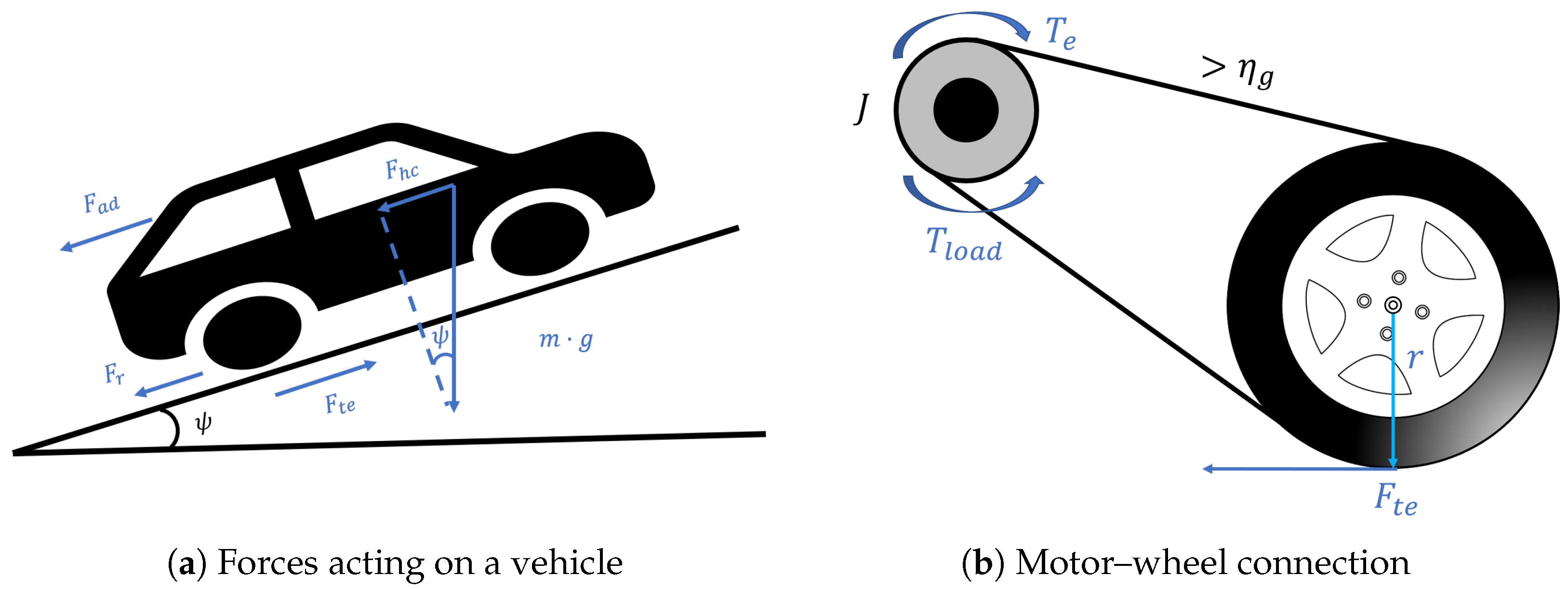
2.2.4. Mechanical Model of the Electric Vehicle
3. Results
3.1. Induction Motor Parameters
3.2. Control Objectives
- The minimization of total electric energy losses during dynamic simulation periods, steady-state operation, and EV driving cycles. The total electric energy losses will be evaluated using Equation (18).
- The minimization of the electromagnetic torque ripple of the induction machine to reduce the mechanical fatigue of the shaft and the mechanical resonance vibration [45,46,47]. This will be evaluated by considering the root-mean-square error (RMSE) between the measured electromagnetic torque of the induction machine and the reference electromagnetic torque generated by the PI controller.
- The ability to follow a given mechanical speed reference with precision during both transient and steady-state operation. This will be evaluated by considering the RMSE between the measured mechanical speed of the induction motor and the reference speed.
3.3. Speed and Load Torque Dynamic Response Tests
- Acceleration and deceleration speed ramps: Reference speed ramps with dynamics 10 times faster than typical urban driving conditions. These scenarios are tested under both loaded and unloaded conditions to assess control performance across varying operational states.
- Operation above nominal speed: Reference speeds exceeding the motor’s nominal speed, forcing a transition from the constant torque region to the constant power region. In this region, both control strategies apply flux weakening to protect the stator winding insulation from breakdown.
- Variable loading torque: Dynamic changes in loading torque are introduced to evaluate the ability of each control strategy to respond effectively to varying mechanical loads.
3.4. Robustness of the Proposed Control Strategy to Motor Parameter Variations
- The stator resistance () was varied from to to account for manufacturing tolerances, aging, and temperature-dependent changes.
- The magnetizing inductance () was varied by to simulate magnetic saturation and manufacturing tolerances.
3.5. EV Application Using the ECE-15 and WLTP-Urban Driving Cycles
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Comprehensive Statistical Evaluation of Control Performance Across Test Scenarios

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Type | Metric Type | RMSE (95% CI) | MAE (95% CI) | Electric Losses (W) | |||
|---|---|---|---|---|---|---|---|
| Classic | Proposed | Classic | Proposed | Classic | Proposed | ||
| Dynamic Response | Speed | 523 | 508 | ||||
| Tracking | [] | [] | [] | ||||
| Torque | |||||||
| Tracking | [] | [] | [] | [] | |||
| ECE-15 | Speed | 277 | 134 | ||||
| Tracking | [] | [] | [] | [] | |||
| Torque | |||||||
| Tracking | [] | [] | [] | [] | |||
| WLTP | Speed | 280 | 142 | ||||
| Tracking | [] | [] | [] | [] | |||
| Torque | |||||||
| Tracking | [] | [] | [] | [] | |||
References
- Moorkens, I.; Tomescu, M.; Das, A.; Emele, L.; Meinke-Hubeny, F.; Nissen, C. Renewable Energy in Europe—2018 Recent Growth and Knock-On Effects; Technical Report; European Environment Agency: Copenhagen, Denmark, 2018. [Google Scholar] [CrossRef]
- Islam, M.S.; Mithulananthan, N.; Lee, K.Y. Development of impact indices for performing charging of a large EV population. IEEE Trans. Veh. Technol. 2017, 67, 866–880. [Google Scholar] [CrossRef]
- Yi, P.; Zhu, T.; Jiang, B.; Jin, R.; Wang, B. Deploying energy routers in an energy internet based on electric vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4714–4725. [Google Scholar] [CrossRef]
- Bulut, M.S.; Ordu, M.; Der, O.; Basar, G. Sustainable Thermoplastic Material Selection for Hybrid Vehicle Battery Packs in the Automotive Industry: A Comparative Multi-Criteria Decision-Making Approach. Polymers 2024, 16, 2768. [Google Scholar] [CrossRef] [PubMed]
- Cai, W.; Wu, X.; Zhou, M.; Liang, Y.; Wang, Y. Review and development of electric motor systems and electric powertrains for new energy vehicles. Automot. Innov. 2021, 4, 3–22. [Google Scholar] [CrossRef]
- Lemmens, J.; Vanassche, P.; Driesen, J. Optimal Control of Traction Motor Drives Under Electrothermal Constraints. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 249–263. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 40. [Google Scholar]
- Wróbel, K.; Serkies, P.; Szabat, K. Model Predictive Base Direct Speed Control of Induction Motor Drive—Continuous and Finite Set Approaches. Energies 2020, 13, 1193. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, B.; Yang, H.; Rodriguez, J. Overview of model predictive control for induction motor drives. Chin. J. Electr. Eng. 2016, 2, 62–76. [Google Scholar]
- Hosseinzadeh, M.A.; Sarbanzadeh, M.; Sarebanzadeh, E.; Rivera, M.; Muñoz, J. Predictive Control in Power Converter Applications: Challenge and Trends. In Proceedings of the 2018 IEEE International Conference on Automation/XXIII Congress of the Chilean Association of Automatic Control (ICA-ACCA), Concepcion, Chil, 17–19 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized two-vector-based model-predictive torque control of induction motor drives. IEEE Trans. Power Electron. 2014, 30, 3818–3829. [Google Scholar] [CrossRef]
- McInerney, I.; Constantinides, G.A.; Kerrigan, E.C. A survey of the implementation of linear model predictive control on fpgas. IFAC-PapersOnLine 2018, 51, 381–387. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Model predictive direct torque control—Part I: Concept, algorithm, and analysis. IEEE Trans. Ind. Electron. 2008, 56, 1894–1905. [Google Scholar] [CrossRef]
- Townsend, C.D.; Summers, T.J.; Vodden, J.; Watson, A.J.; Betz, R.E.; Clare, J.C. Optimization of switching losses and capacitor voltage ripple using model predictive control of a cascaded H-bridge multilevel StatCom. IEEE Trans. Power Electron. 2012, 28, 3077–3087. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.C. Switching strategy based on model predictive control of VSI to obtain high efficiency and balanced loss distribution. IEEE Trans. Power Electron. 2013, 29, 4551–4567. [Google Scholar] [CrossRef]
- Lim, S.; Nam, K. Loss-minimising control scheme for induction motors. IEE Proc.-Electr. Power Appl. 2004, 151, 385–397. [Google Scholar] [CrossRef]
- Wang, K.; Huai, R.; Yu, Z.; Zhang, X.; Li, F.; Zhang, L. Comparison Study of Induction Motor Models Considering Iron Loss for Electric Drives. Energies 2019, 12, 503. [Google Scholar] [CrossRef]
- Lorenz, R.; Yang, S.M. Efficiency-optimized flux trajectories for closed-cycle operation of field-orientation induction machine drives. IEEE Trans. Ind. Appl. 1992, 28, 574–580. [Google Scholar] [CrossRef]
- García, G.O.; Luis, J.C.M.; Stephan, R.M.; Watanabe, E.H. An efficient controller for an adjustable speed induction motor drive. IEEE Trans. Ind. Electron. 1994, 41, 533–539. [Google Scholar] [CrossRef]
- Wee, S.D.; Shin, M.H.; Hyun, D.S. Stator-flux-oriented control of induction motor considering iron loss. IEEE Trans. Ind. Electron. 2001, 48, 602–608. [Google Scholar]
- Uddin, M.N.; Nam, S.W. New online loss-minimization-based control of an induction motor drive. IEEE Trans. Power Electron. 2008, 23, 926–933. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lipcak, O.; Bauer, J. Iron Loss Minimization Strategy for Predictive Torque Control of Induction Motor. Electronics 2020, 9, 566. [Google Scholar] [CrossRef]
- Najafabadi, A.M. Efficiency Optimization of Induction Machine Drives with Model Predictive Control. 2021. Available online: https://core.ac.uk/download/pdf/395079514.pdf (accessed on 10 March 2025).
- Eftekhari, S.R.; Davari, S.A.; Naderi, P.; Garcia, C.; Rodriguez, J. Robust loss minimization for predictive direct torque and flux control of an induction motor with electrical circuit model. IEEE Trans. Power Electron. 2019, 35, 5417–5426. [Google Scholar] [CrossRef]
- Asif, P.; Mohanrajan, S. Performance comparison of model predictive control and direct torque control for induction motor based electric vehicle. In Proceedings of the 2021 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 30–31 July 2021; pp. 1–6. [Google Scholar]
- U.S. Department of Energy. Improving Motor and Drive System Performance: A Sourcebook for Industry, 2nd ed.; U.S. Department of Energy: Washington, DC, USA, 2014.
- Dinolova, P.; Ruseva, V.; Dinolov, O. Energy Efficiency of Induction Motor Drives: State of the Art, Analysis and Recommendations. Energies 2023, 16, 7136. [Google Scholar] [CrossRef]
- Łuczak, D. Mathematical model of multi-mass electric drive system with flexible connection. In Proceedings of the 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014; pp. 590–595. [Google Scholar] [CrossRef]
- Umland, J.; Safiuddin, M. Magnitude and symmetric optimum criterion for the design of linear control systems: What is it and how does it compare with the others? IEEE Trans. Ind. Appl. 1990, 26, 489–497. [Google Scholar] [CrossRef]
- Kessler, C. Das Symmetrische Optimum, Teil I. At-Automatisierungstechnik 1958, 6, 395–400. [Google Scholar] [CrossRef]
- Steinmetz, C.P. On the law of hysteresis. Proc. IEEE 1984, 72, 197–221. [Google Scholar] [CrossRef]
- Levi, E. Rotor Flux Oriented Control of Induction Machines Considering the Core Loss. Electr. Mach. Power Syst. 1996, 24, 37–50. [Google Scholar] [CrossRef]
- Sokola, M.; Levi, E. A Novel Induction Machine Model and its Application in the Development of an Advanced Vector Control Scheme. Int. J. Electr. Eng. Educ. 2000, 37, 233–248. [Google Scholar] [CrossRef]
- Pyrhonen, J. Design of Rotating Electrical Machines; Wiley-VCH: Hoboken, NJ, USA, 2013; Volume 1. [Google Scholar]
- De Boor, C.; De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; Volume 27. [Google Scholar]
- Nicolás Martín, C. Optimum Flux Function Generator. 2024. Available online: https://zenodo.org/records/5862749 (accessed on 10 March 2025).
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.; Correa, P.; Lezana Illesca, P.; Cortes, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Moore, G. Moore’s law. Electron. Mag. 1965, 38, 114. [Google Scholar]
- Xie, W.; Wang, X.; Wang, F.; Xu, W.; Kennel, R.; Gerling, D. Dynamic Loss Minimization of Finite Control Set-Model Predictive Torque Control for Electric Drive System. IEEE Trans. Power Electron. 2016, 31, 849–860. [Google Scholar] [CrossRef]
- Larminie, J.; Lowry, J. Electric Vehicle Technology Explained; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Levi, E.; Sokola, M.; Boglietti, A.; Pastorelli, M. Iron loss in rotor-flux-oriented induction machines: Identification, assessment of detuning, and compensation. IEEE Trans. Power Electron. 1996, 11, 698–709. [Google Scholar] [CrossRef]
- Boldea, I. Induction Machines Handbook: Transients, Control Principles, Design and Testing; CRC press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Venkat Raman, B.S.; Tripathi, P.R.; Gupta, G.S.; Keshri, R.K. Effects of Injected Harmonics on Torque Pulsations of a Three Phase Induction Motor: Study on SPWM. In Proceedings of the 2020 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 2–4 July 2020; pp. 637–642. [Google Scholar] [CrossRef]
- Pfannenstiel, A.; Moeckel, A. Reduction of torque ripple in induction motors by using a modulated rotor. In Proceedings of the Innovative Small Drives and Micro-Motor Systems; 11th GMM/ETG-Symposium, Saarbruecken, Germany, 27–28 September 2017; pp. 1–6. [Google Scholar]
- Abad, G. Power Electronics and Electric Drives for Traction Applications; John Wiley & Sons: Hoboken, NJ, USA, 2016; Chapter 2. [Google Scholar]
- Sul, S.K. Control of Electric Machine Drive Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 88. [Google Scholar]
- Suryawanshi, H.; Patil, U.; Renge, M.; Kulat, K. Modified combined DTC and FOC based control for medium voltage induction motor drive in SVM controlled DCMLI. EPE J. 2013, 23, 23–32. [Google Scholar] [CrossRef]
- Derouich, A.; Lagrioui, A. Real-time simulation and analysis of the induction machine performances operating at flux constant. Int. J. Adv. Comput. Sci. Appl. 2014, 5. [Google Scholar] [CrossRef]
- Mehedi, I.M.; Saad, N.; Magzoub, M.A.; Al-Saggaf, U.M.; Milyani, A.H. Simulation analysis and experimental evaluation of improved field-oriented controlled induction motors incorporating intelligent controllers. IEEE Access 2022, 10, 18380–18394. [Google Scholar] [CrossRef]
- De Abreu, J.P.G.; Emanuel, A.E. Induction motor thermal aging caused by voltage distortion and imbalance: Loss of useful life and its estimated cost. In Proceedings of the 2001 IEEE Industrial and Commercial Power Systems Technical Conference. Conference Record (Cat. No. 01CH37226), New Orleans, LA, USA, 15–16 May 2001; pp. 105–114. [Google Scholar]
- Popsi, N.R.S.; Anik, A.; Verma, R.; Viana, C.; Iyer, K.L.V.; Kar, N.C. Influence of Electric Motor Manufacturing Tolerances on End-of-Line Testing: A Review. Energies 2024, 17, 1913. [Google Scholar] [CrossRef]
- Ben Slimene, M.; Khlifi, M.A. Investigation on the Effects of Magnetic Saturation in Six-Phase Induction Machines with and without Cross Saturation of the Main Flux Path. Energies 2022, 15, 9412. [Google Scholar] [CrossRef]
- DieselNet. Worldwide Harmonized Light Vehicles Test Cycle (WLTC); DiselNet: Mississauga, ON, Canada, 2024. [Google Scholar]
- Yousri, M.; Jacobs, G.; Neumann, S. Effect of Electrification on the Quantitative Reliability of an Offshore Crane Winch in Terms of Drive-Induced Torque Ripples. Model. Identif. Control (MIC) 2023, 44, 1–16. [Google Scholar] [CrossRef]





| Study | Computational Cost of Loss Minimization | Torque Ripple Reduction | Loss Reduction | EV Validation | Limitations |
|---|---|---|---|---|---|
| [24] | Moderate | Reduction in torque (approximately 20% decrease) as a byproduct of DC-link voltage reduction | Approximately 15–20% decrease in losses | No explicit validation | Focuses mainly on iron losses |
| [25] | High | No explicit reduction in torque ripple | Inverter efficiency improved by 1%; IM efficiency of 0.6% | No explicit validation | High computational cost |
| [26] | Moderate | No explicit strategy; reduction as a byproduct of flux selection (below 2% variation) | More than 30% | No explicit validation | Different IM models are used for MPC and loss minimization |
| This study | Low | Explicit strategy for torque reduction (80% decrease) | Up to 50% during urban driving scenarios | Tested for EV applications (ECE-15 and WLTP) | – |
| Parameter | Value |
|---|---|
| Pairs of poles (p) | 2 |
| Stator resistance () | 0.0074 |
| Rotor resistance () | 0.0084 |
| Magnetizing inductance () | 12.8 mH |
| Stator leakage inductance () | 0.385 mH |
| Rotor leakage inductance () | 0.385 mH |
| Nominal power () | 100 kW |
| Maximum stator current () | 600 A |
| DC link voltage () | 565 V |
| Nominal stator flux () | 1.03 Wb |
| Nominal speed () | 1485 r/min |
| Metric | Reduction (%) |
|---|---|
| RMSE Speed Error (Measured vs. Reference Values) | 8.06% |
| RMSE Torque Error (Measured vs. Reference Values) | 85.39% |
| Total Electric Losses | 2.84% |
| Current THD | 37.97% |
| Parameter Variation | RMSE | RMSE |
|---|---|---|
| Torque Ripple (%) | Speed Tracking (%) | |
| Baseline (Classic) | ||
| Baseline (Proposed) | ||
| +50% | ||
| −20% | ||
| +20% | ||
| −20% |
| Parameter Variation | Medium Load (% of Baseline) | Low Load (% of Baseline) | ||
|---|---|---|---|---|
| Classic MPC | Proposed MPC | Classic MPC | Proposed MPC | |
| Baseline | 100 | 100 | ||
| +50% | ||||
| −20% | ||||
| +20% | 80 | 24 | ||
| −20% | 114 | |||
| Parameter | Value |
|---|---|
| Mass, m | 1000 kg |
| Gearbox ratio, G | 3.2 |
| Radius of the wheel, r | 0.26 m |
| Frontal area of the vehicle, A | 2.4 m2 |
| Drag coefficient, | 0.3 |
| Air density, | 1.223 kg/m3 |
| Efficiency of the gearbox, | 0.8 |
| Acceleration due to gravity, g | 9.81 m/s2 |
| Road slope, | 0º |
| Coefficient of rolling resistance, | 0.01 |
| Metric | Reduction (%) | |
|---|---|---|
| ECE-15 | WLTP-Urban | |
| RMSE Torque Error (Measured vs. Reference) | 93.23 | 93.55 |
| Total Electric Losses | 51.57 | 49.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nicolás-Martín, C.; Montilla-DJesus, M.E.; Santos-Martín, D.; Martínez-Crespo, J. Computationally Efficient and Loss-Minimizing Model Predictive Control for Induction Motors in Electric Vehicle Applications. Energies 2025, 18, 1444. https://doi.org/10.3390/en18061444
Nicolás-Martín C, Montilla-DJesus ME, Santos-Martín D, Martínez-Crespo J. Computationally Efficient and Loss-Minimizing Model Predictive Control for Induction Motors in Electric Vehicle Applications. Energies. 2025; 18(6):1444. https://doi.org/10.3390/en18061444
Chicago/Turabian StyleNicolás-Martín, Carolina, Miguel E. Montilla-DJesus, David Santos-Martín, and Jorge Martínez-Crespo. 2025. "Computationally Efficient and Loss-Minimizing Model Predictive Control for Induction Motors in Electric Vehicle Applications" Energies 18, no. 6: 1444. https://doi.org/10.3390/en18061444
APA StyleNicolás-Martín, C., Montilla-DJesus, M. E., Santos-Martín, D., & Martínez-Crespo, J. (2025). Computationally Efficient and Loss-Minimizing Model Predictive Control for Induction Motors in Electric Vehicle Applications. Energies, 18(6), 1444. https://doi.org/10.3390/en18061444