
Multi-Peak Photovoltaic Maximum Power Point Tracking Method Based on Honey Badger Algorithm Under Localized Shading Conditions

Abstract
1. Introduction
2. PV Power Generation System with Partial Shading
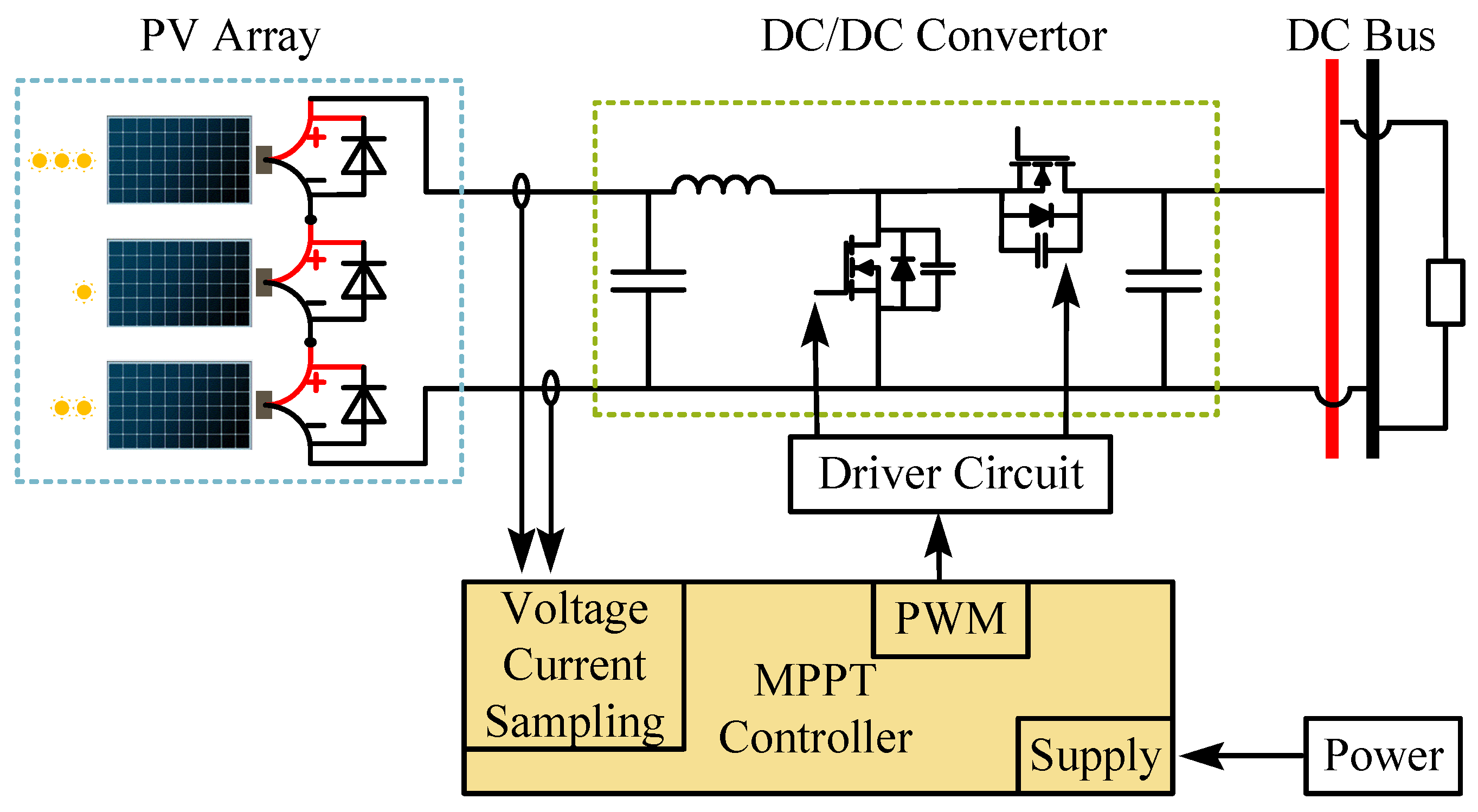
2.1. PV Power Generation System
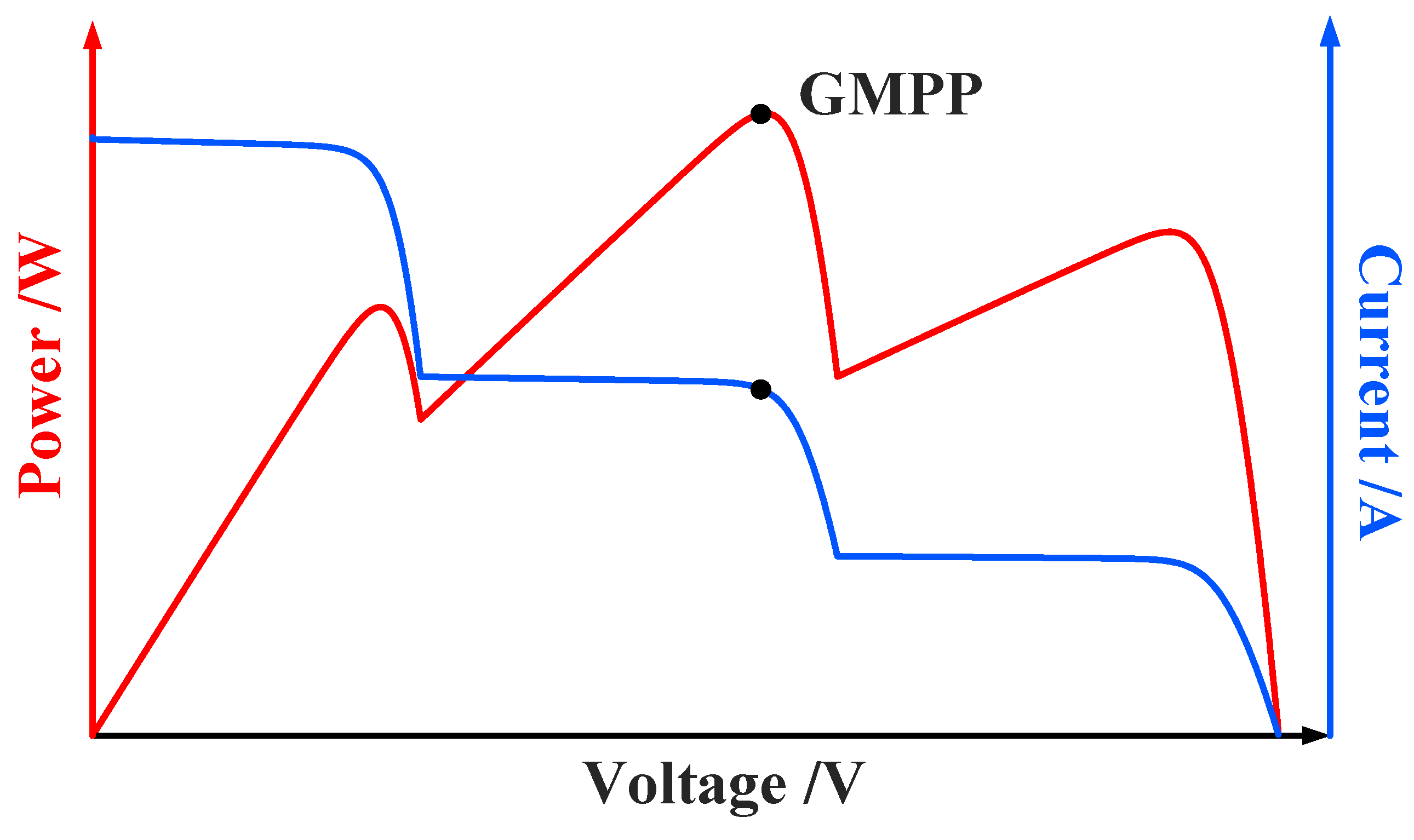
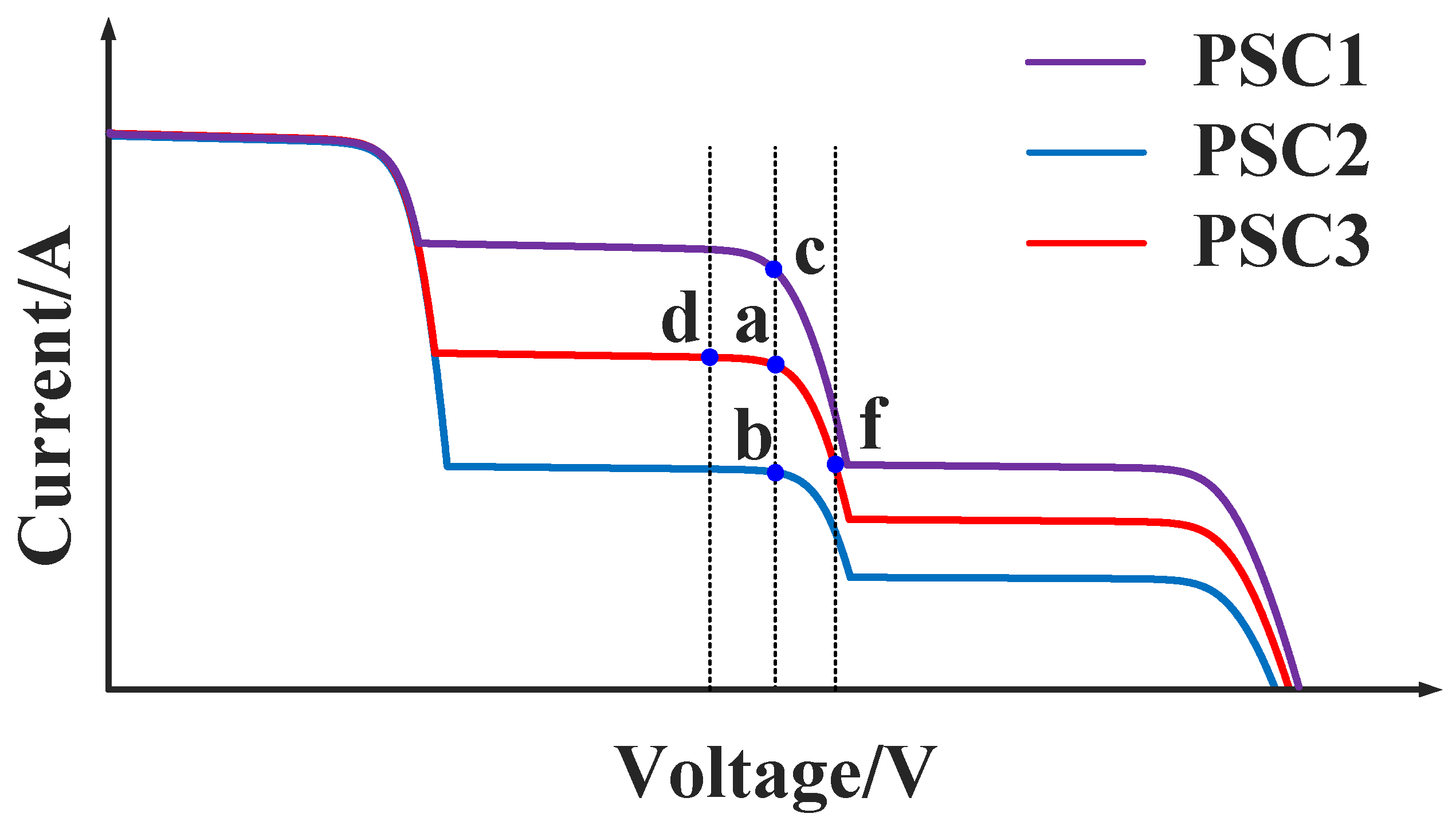
2.2. Analysis of Local Shading Effect
3. Proposed Global MPPT Method
3.1. HBA Algorithm Principle
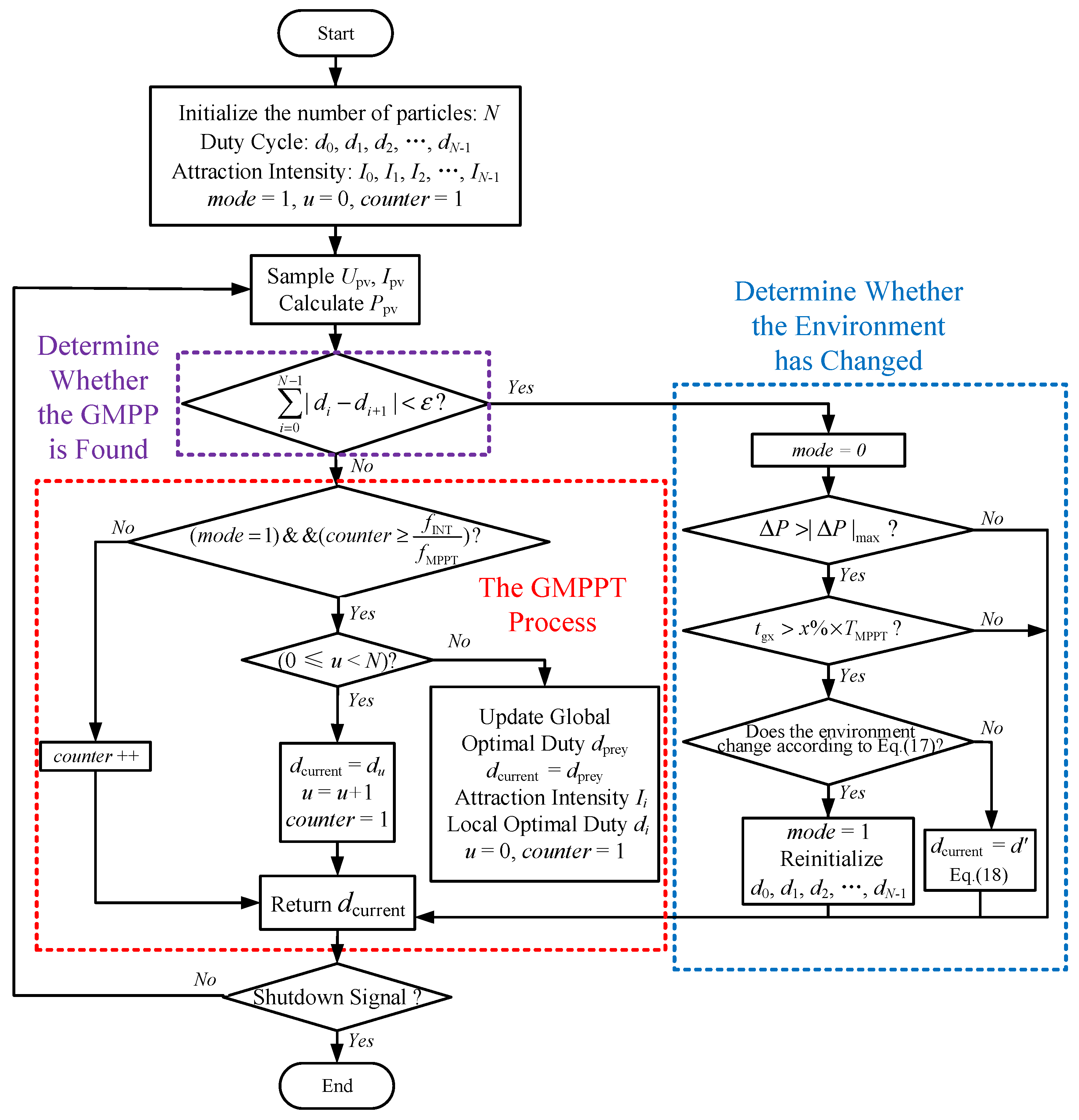
3.2. Multi-Peak PV MPPT Method Based on HBA
3.3. Basis for Determining Changes in the External Environment
4. Simulation Results
5. Experimental Results and Analysis
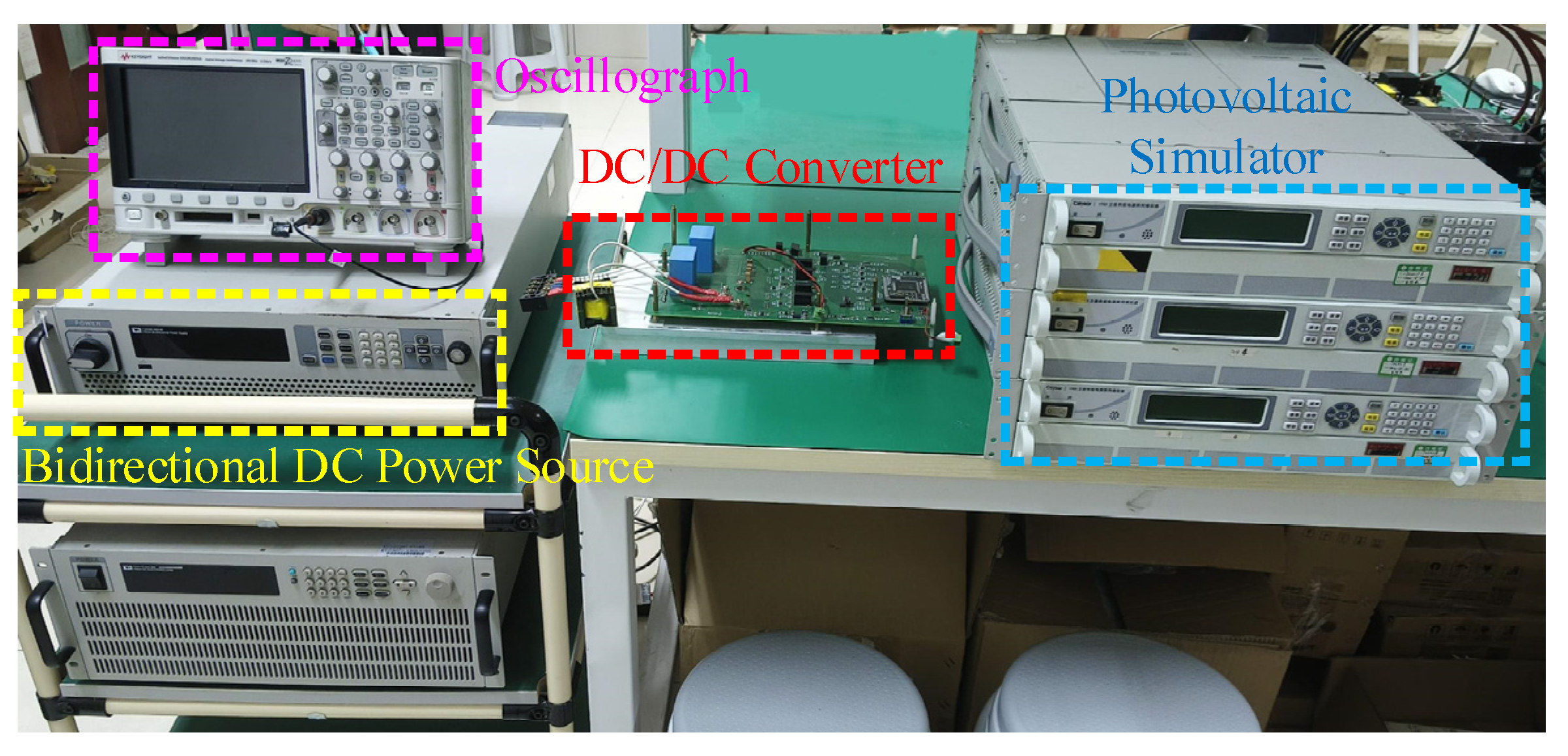
5.1. Experimental Parameters
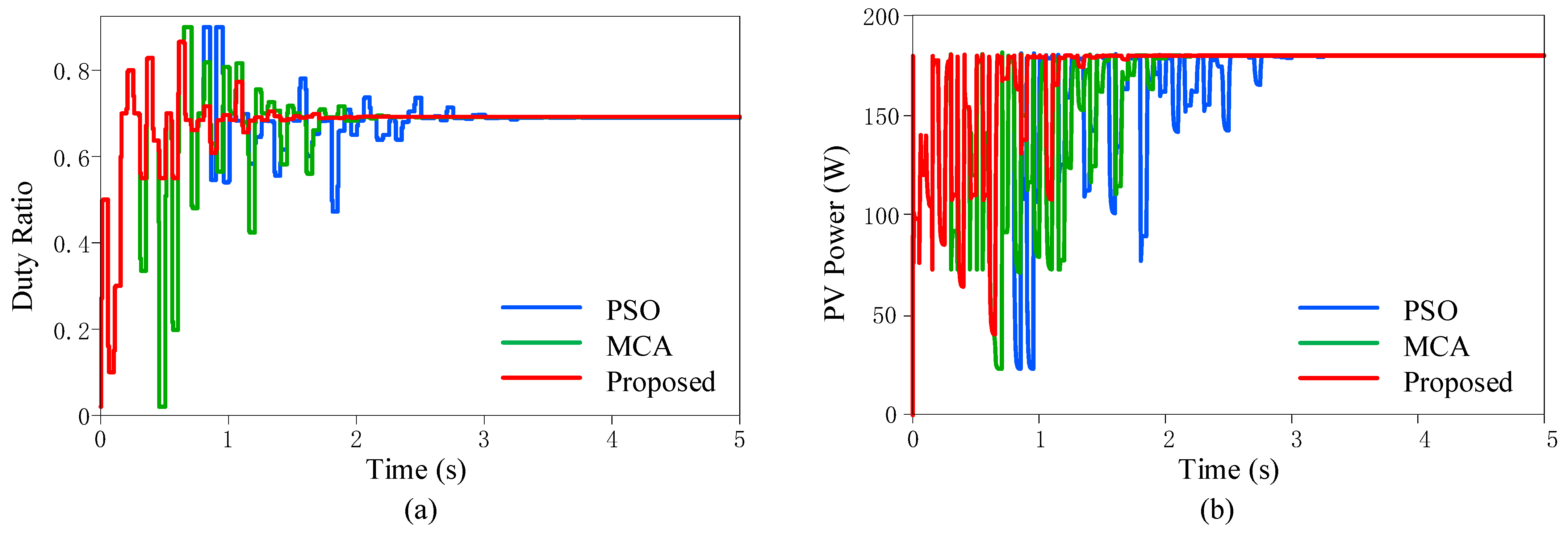
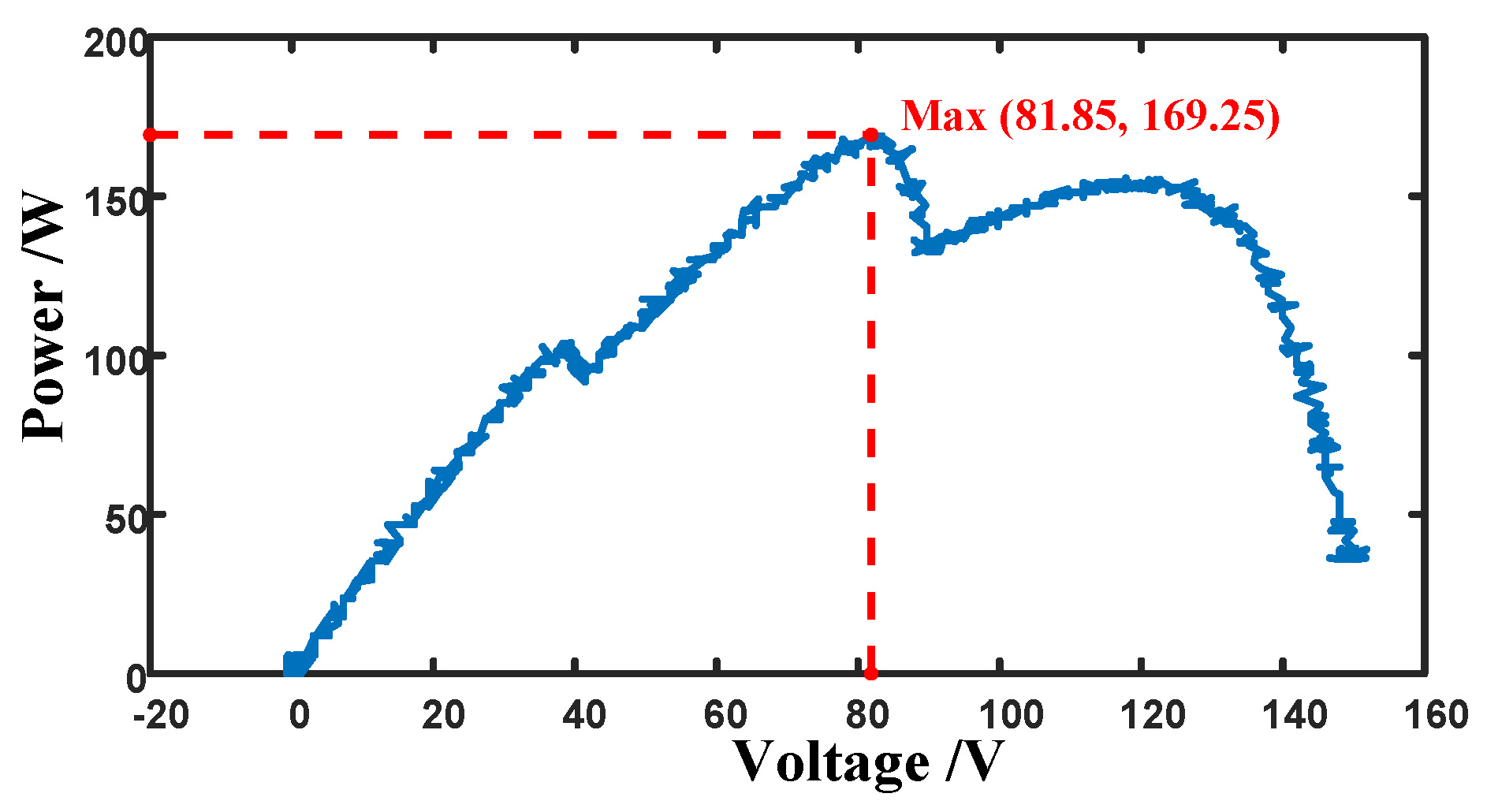
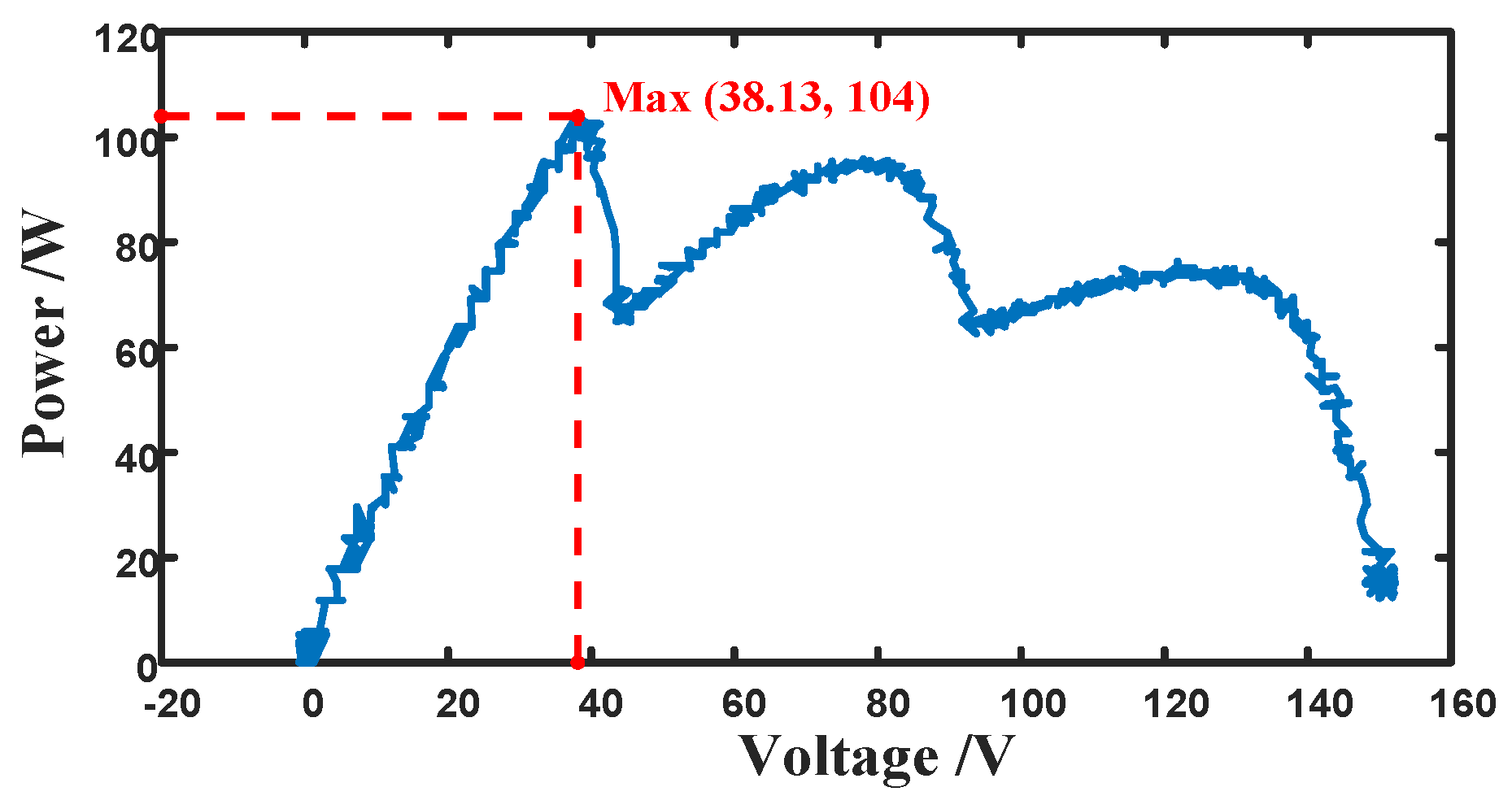
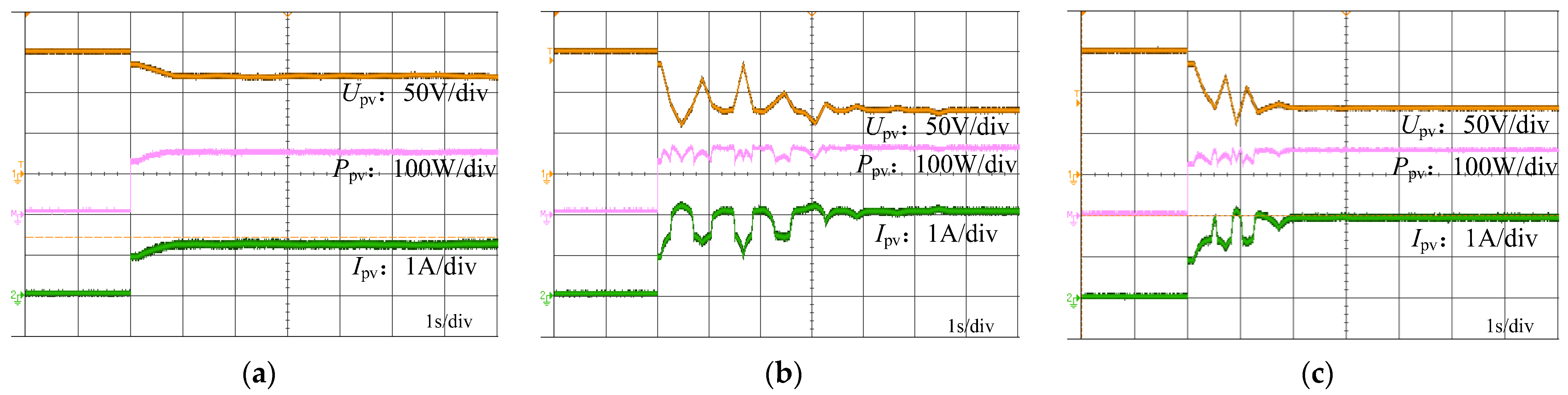
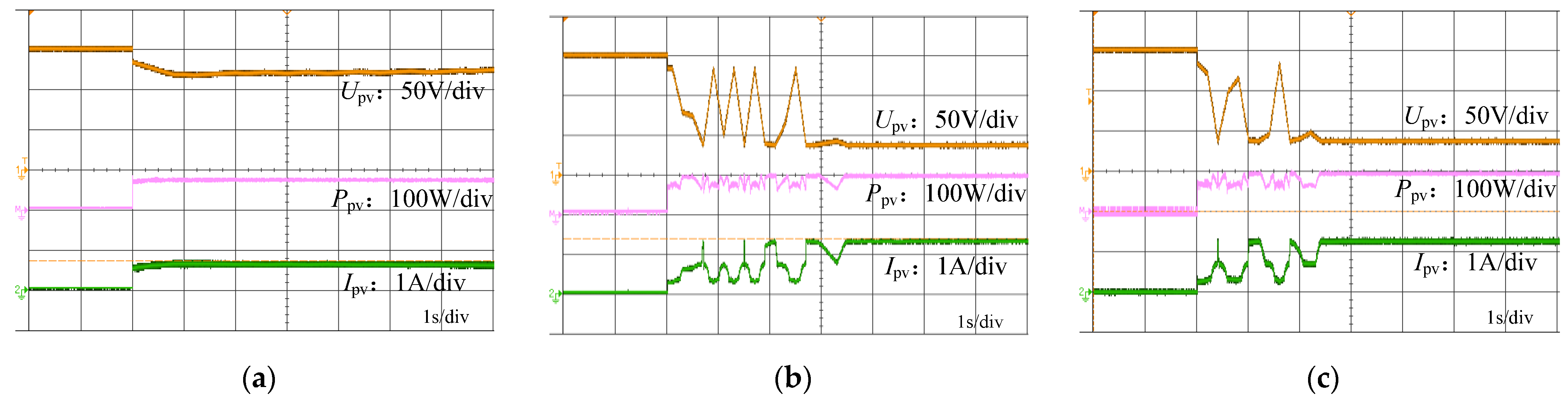
5.2. Experimental Results and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSC | Partial Shading Conditions |
| MPPT | Maximum Power Point Tracking |
| HBA | Honey Badger Algorithm |
| P&O | Perturbation Observation |
| PSO | Particle Swarm Optimization |
| PV | Photovoltaic |
| InC | Incremental Conductance |
| GMPP | Global Maximum Power Point |
References
- Chen, J.; Cui, H.; Xu, Y.; Ge, Q. Long-term temperature and sea-level rise stabilization before and beyond 2100: Estimating the additional climate mitigation contribution from China’s recent 2060 carbon neutrality pledge. Environ. Res. Lett. 2021, 16, 074032. [Google Scholar] [CrossRef]
- Sher, H.A.; Addoweesh, K.E.; Al-Haddad, K. An efficient and cost-effective hybrid MPPT method for a photovoltaic flyback microinverter. IEEE Trans. Sustain. Energ. 2018, 9, 1137–1144. [Google Scholar] [CrossRef]
- Abdulmawjood, K.; Alsadi, S.; Refaat, S.S.; Morsi, W.G. Characteristic study of solar photovoltaic array under different partial shading conditions. IEEE Access 2022, 10, 6856–6866. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the perturb-and-observe and incremental conductance MPPT methods for PV systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Elbarbary, Z.M.S.; Alranini, M.A. Review of maximum power point tracking algorithms of PV system. Front. Eng. Built Environ. 2021, 1, 68–80. [Google Scholar] [CrossRef]
- Nadeem, A.; Hussain, A. A comprehensive review of global maximum power point tracking algorithms for photovoltaic systems. Energy Syst. 2021, 14, 293–334. [Google Scholar] [CrossRef]
- Allahabadi, S.; Iman-Eini, H.; Farhangi, S. Fast artificial neural network based method for estimation of the global maximum power point in photovoltaic systems. IEEE Trans. Ind. Electron. 2022, 69, 5879–5888. [Google Scholar] [CrossRef]
- Xu, S.; Gao, Y.; Zhou, G.; Mao, G. A global maximum power point tracking algorithm for photovoltaic systems under partially shaded conditions using modified maximum power trapezium method. IEEE Trans. Ind. Electron. 2021, 68, 370–380. [Google Scholar] [CrossRef]
- Villegas-Mier, C.G.; Rodriguez-Resendiz, J.; Álvarez-Alvarado, J.M.; Rodriguez-Resendiz, H.; Herrera-Navarro, A.M.; Rodríguez-Abreo, O. Artificial neural networks in MPPT algorithms for optimization of photovoltaic power systems: A Review. Micromachines 2021, 12, 1260. [Google Scholar] [CrossRef]
- Mobarak, M.H.; Bauman, J. A fast parabolic-assumption algorithm for global MPPT of photovoltaic systems under partial shading conditions. IEEE Trans. Ind. Electron. 2022, 69, 8066–8079. [Google Scholar] [CrossRef]
- Shams, I.; Mekhilef, S.; Tey, K.S. Maximum power point tracking using modified butterfly optimization algorithm for partial shading, uniform shading, and fast varying load conditions. IEEE Trans. Power Electron. 2021, 36, 5569–5581. [Google Scholar] [CrossRef]
- Javed, S.; Shaque, K.; Siddique, I.A.; Salam, Z. A simple yet fully adaptive PSO algorithm for global peak tracking of photovoltaic array under partial shading conditions. IEEE Trans. Ind. Electron. 2022, 69, 5922–5930. [Google Scholar] [CrossRef]
- Kamil, A.; Nasr, M.; Alwash, S. Maximum power point tracking method for photovoltaic system based on enhanced particle swarm optimization algorithm under partial shading condition. Int. J. Intell. Eng. Syst. 2020, 13, 241–254. [Google Scholar] [CrossRef]
- Makhloufi, S.; Mekhilef, S. Logarithmic PSO-based global/local maximum power point tracker for partially shaded photovoltaic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 375–386. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z. A deterministic particle swarm optimization maximum power point tracker for photovoltaic system under partial shading condition. IEEE Trans. Ind. Electron. 2013, 60, 3195–3206. [Google Scholar] [CrossRef]
- Ali, M.E. A novel musical chairs algorithm applied for MPPT of PV systems. Renew. Sust. Energ. Rev. 2021, 146, 111135. [Google Scholar]
- Hao, W.; Lin, L.; Haoshen, Y.; Weiwei, Z. Enhancing MPPT efficiency in PV systems under partial shading: A hybrid POA&PO approach for rapid and accurate energy harvesting. Int. J. Elec. Power. 2024, 162, 110260. [Google Scholar]
- Ali, M.E. A Novel Strategy for Optimal PSO Control Parameters Determination for PV Energy Systems. Sustainability 2021, 13, 1008. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2021, 192, 84–110. [Google Scholar] [CrossRef]
- Li, Q.; Zhao, S.; Wang, M.; Zou, Z.; Wang, B.; Chen, Q. An improved perturbation and observation maximum power point tracking algorithm based on a PV module four-parameter model for higher efficiency. Appl. Energy 2017, 195, 523–537. [Google Scholar] [CrossRef]
- Nandi, A.; Manna, A.; Mohapatra, A.; Saiprakash, C. Analysis of effect of partial shading on PV array and location of local maxima in PV characteristics. In Proceedings of the 2022 2nd International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 21–22 January 2022. [Google Scholar]
- Furtado, A.; Bradaschia, F.; Cavalcanti, M.; Limongi, L.R. A reduced voltage range global maximum power point tracking algorithm for photovoltaic systems under partial shading conditions. IEEE Trans. Ind. Electron. 2018, 65, 3252–3262. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Convergence Speed | Tracking Efficiency | Oscillations at Steady State | Implementation Complexity | Boundary Detection | Categorization of Power Changes | No. of Control Parameters |
|---|---|---|---|---|---|---|---|
| PSO [13] | Slow | Low | Low | High | No | No | 3 |
| MCA [16] | Fast | High | Low | Medium | No | No | 1 |
| POA&PO [17] | Fast | Medium | Medium | High | No | No | 2 |
| NESTPSO [18] | Medium | Medium | Low | High | No | No | 3 |
| Proposed | Fast | High | Zero | Medium | Yes | Yes | 2 |
| # | Uoc (V) | Isc (A) | Umpp (V) | Impp (A) | Pmpp (W) | Pgmpp (W) |
|---|---|---|---|---|---|---|
| 1 | 50 | 3.0 | 40 | 2.7 | 104 | |
| 2 | 50 | 1.5 | 40 | 1.0 | 169.25 | 169.25 |
| 3 | 50 | 2.3 | 40 | 2.0 | 155.7 |
| # | Uoc (V) | Isc (A) | Umpp (V) | Impp (A) | Pmpp (W) | Pgmpp (W) |
|---|---|---|---|---|---|---|
| 1 | 50 | 3.0 | 40 | 2.7 | 104 | |
| 2 | 50 | 1.5 | 40 | 1.0 | 95.84 | 104 |
| 3 | 50 | 0.7 | 40 | 0.5 | 76.38 |
| # | Method | Pmpp (W) | Umpp (V) | Impp (A) | t (s) | η (%) |
|---|---|---|---|---|---|---|
| 1 | P&O | 154.6 | 118 | 1.31 | 0.9 | 91.3 |
| PSO | 165 | 83.3 | 1.98 | 4 | 97.5 | |
| HBA | 166.8 | 83 | 2.01 | 2 | 98.6 | |
| 2 | P&O | 75 | 121 | 0.62 | 0.9 | 72.1 |
| PSO | 100 | 39.4 | 2.54 | 3.4 | 96.2 | |
| HBA | 102 | 39 | 2.62 | 2.4 | 98.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gui, Q.; Wang, L.; Ding, C.; Xu, W.; Li, X.; Yu, F.; Wang, H. Multi-Peak Photovoltaic Maximum Power Point Tracking Method Based on Honey Badger Algorithm Under Localized Shading Conditions. Energies 2025, 18, 1258. https://doi.org/10.3390/en18051258
Gui Q, Wang L, Ding C, Xu W, Li X, Yu F, Wang H. Multi-Peak Photovoltaic Maximum Power Point Tracking Method Based on Honey Badger Algorithm Under Localized Shading Conditions. Energies. 2025; 18(5):1258. https://doi.org/10.3390/en18051258
Chicago/Turabian StyleGui, Qianjin, Lei Wang, Chao Ding, Wenfa Xu, Xiaoyang Li, Feilong Yu, and Haisen Wang. 2025. "Multi-Peak Photovoltaic Maximum Power Point Tracking Method Based on Honey Badger Algorithm Under Localized Shading Conditions" Energies 18, no. 5: 1258. https://doi.org/10.3390/en18051258
APA StyleGui, Q., Wang, L., Ding, C., Xu, W., Li, X., Yu, F., & Wang, H. (2025). Multi-Peak Photovoltaic Maximum Power Point Tracking Method Based on Honey Badger Algorithm Under Localized Shading Conditions. Energies, 18(5), 1258. https://doi.org/10.3390/en18051258