

Consideration of Wind-Solar Uncertainty and V2G Mode of Electric Vehicles in Bi-Level Optimization Scheduling of Microgrids

Abstract
1. Introduction
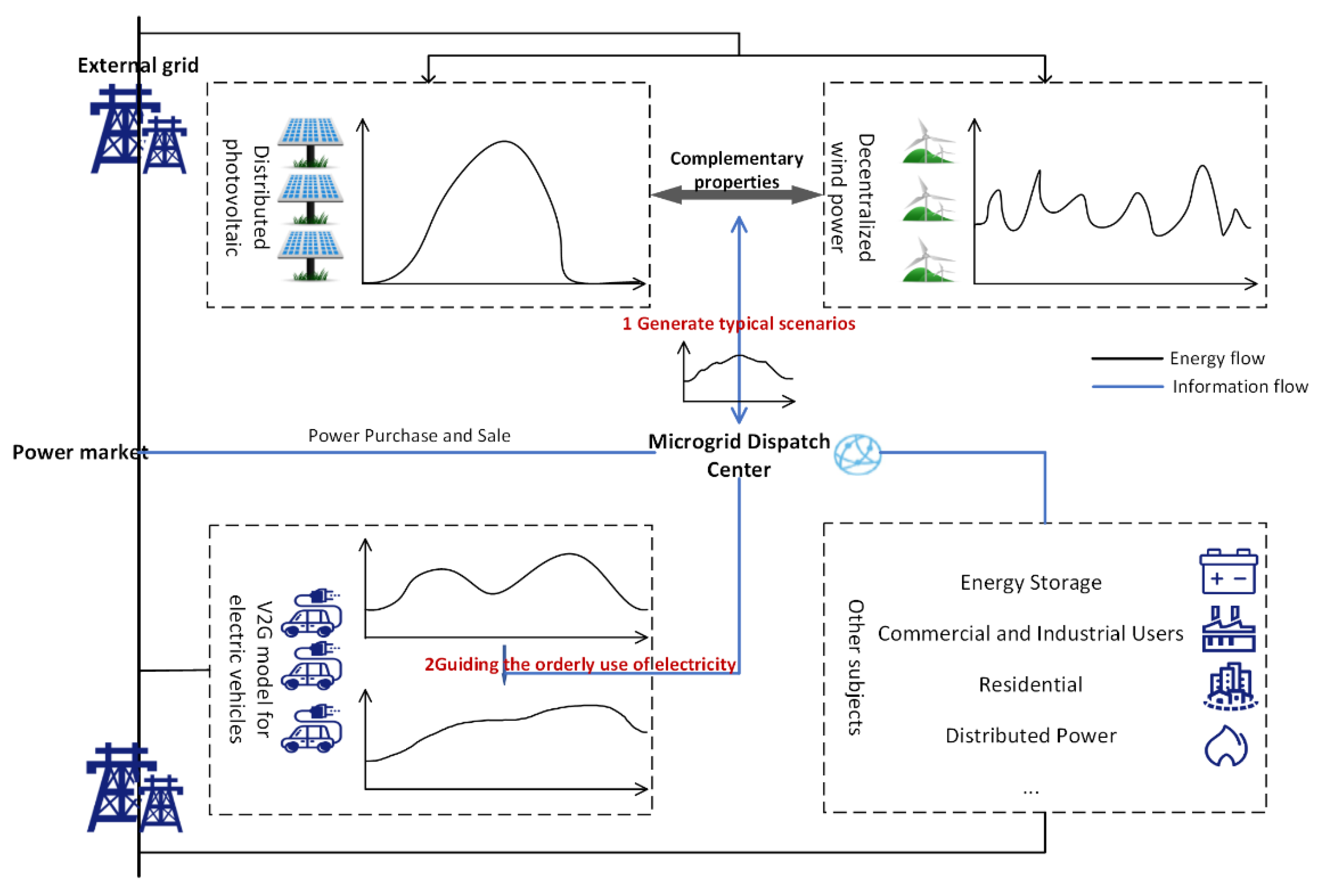
2. Microgrid Architecture Considering Wind–Solar Complementarity and V2G Technology
3. Generation of Scenarios Considering the Uncertainty and Correlation of Wind and Solar Output
3.1. Kernel Density Estimation
3.2. Modeling of Wind and Light Output Correlation and Generation of Output Scenarios Based on Copula Theory
3.2.1. Copula Correlation Theory
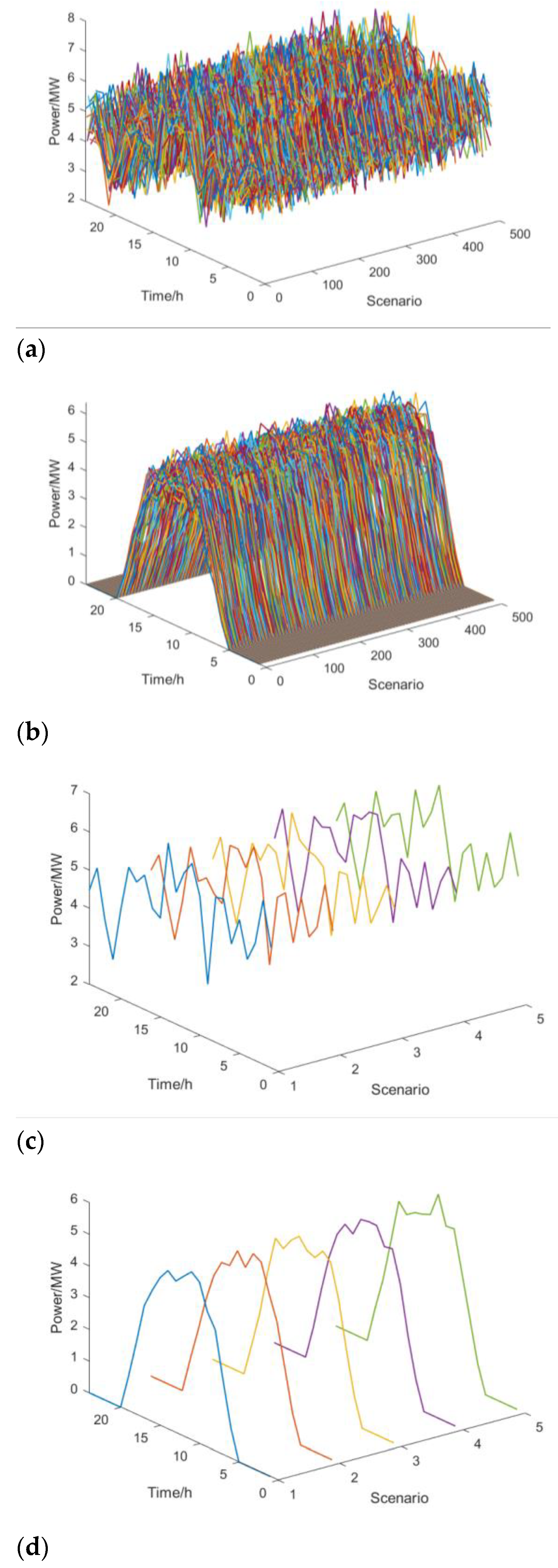
3.2.2. Generation of Wind–Solar Scenarios and Complementarity Characteristics
- (1)
- Generate random numbers within the interval [0,1].
- (2)
- Assign the marginal distribution function value of the first random variable as . Next, compute the marginal distribution function value of the second random variable by applying the copula function chosen in Section 3.2.1, which involves solving Equation (8).
- (1)
- Generate random values in the range [0,1].
- (2)
- With the marginal distribution function value of the first random variable established, calculate the value of the second random variable’s marginal distribution function based on the copula function identified in Section 3.2.1, effectively resolving Equation (8).
- (3)
- The marginal distribution function value of the n-th random variable should be regarded as the solution to Equation (9).
- (4)
- By repeating Steps (1), (2), and (3) a total of k times, k sets of marginal distribution function values for n random variables can be obtained.
- (5)
- By performing the inverse function operation, the results can be transformed into a joint distribution function scenario, where the index j ranges from 1 to T, with T representing the total number of days.
3.2.3. Indicators of Wind–Solar Complementarity Characteristics
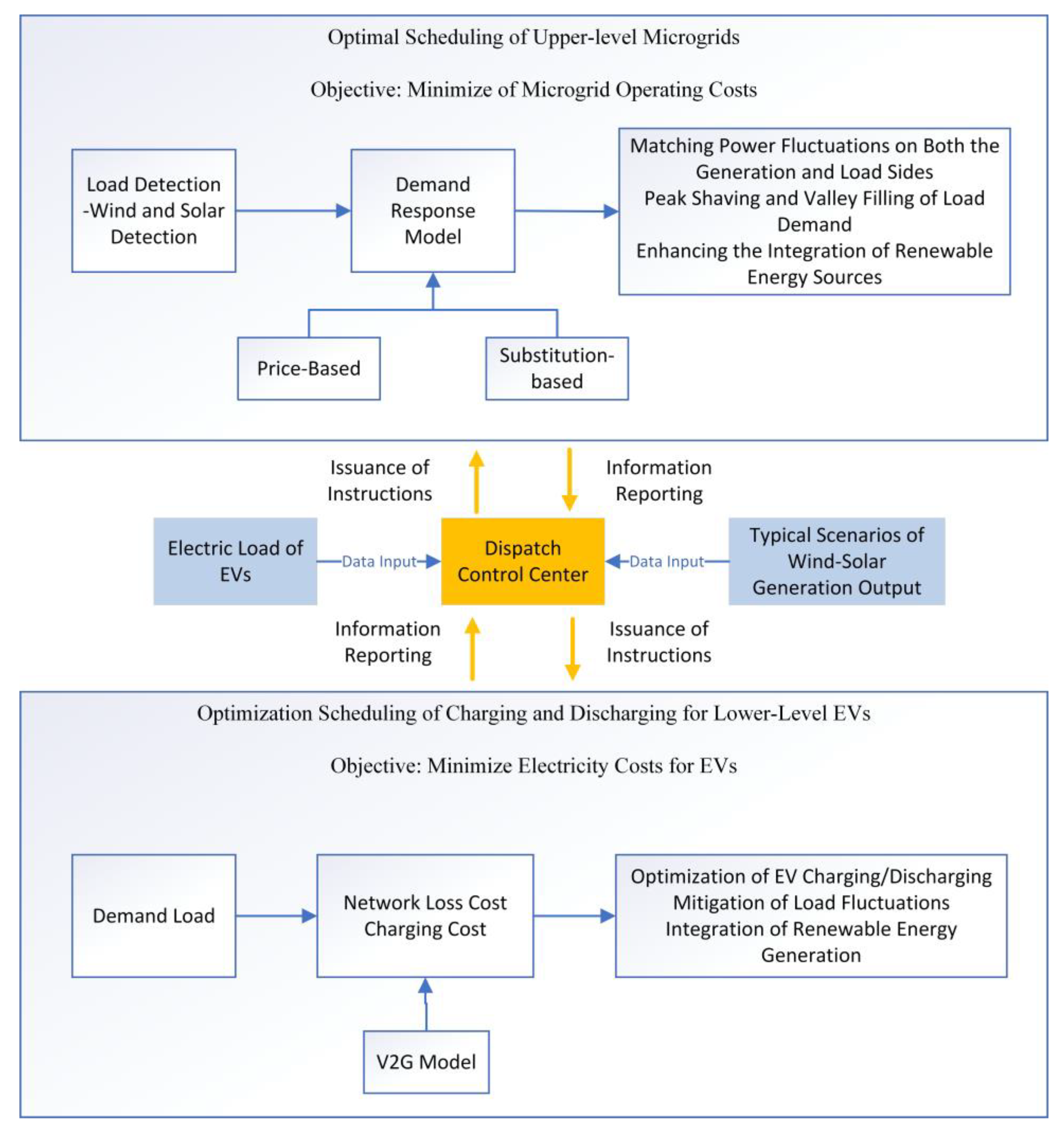
4. Hierarchical Optimization Scheduling Model for Microgrid
4.1. Hierarchical Optimization Scheduling Strategy
4.2. Demand Response Program Model
4.2.1. Price-Based Demand Response
4.2.2. Replaceable Demand Response
4.3. Upper-Level Optimization Model
4.3.1. Objective Function
4.3.2. Constraints
4.4. Lower-Level Optimization Model
4.4.1. Objective Function
4.4.2. Constraints
4.5. Bi-Level Optimization Scheduling Model Solution
4.5.1. Upper-Level Solution
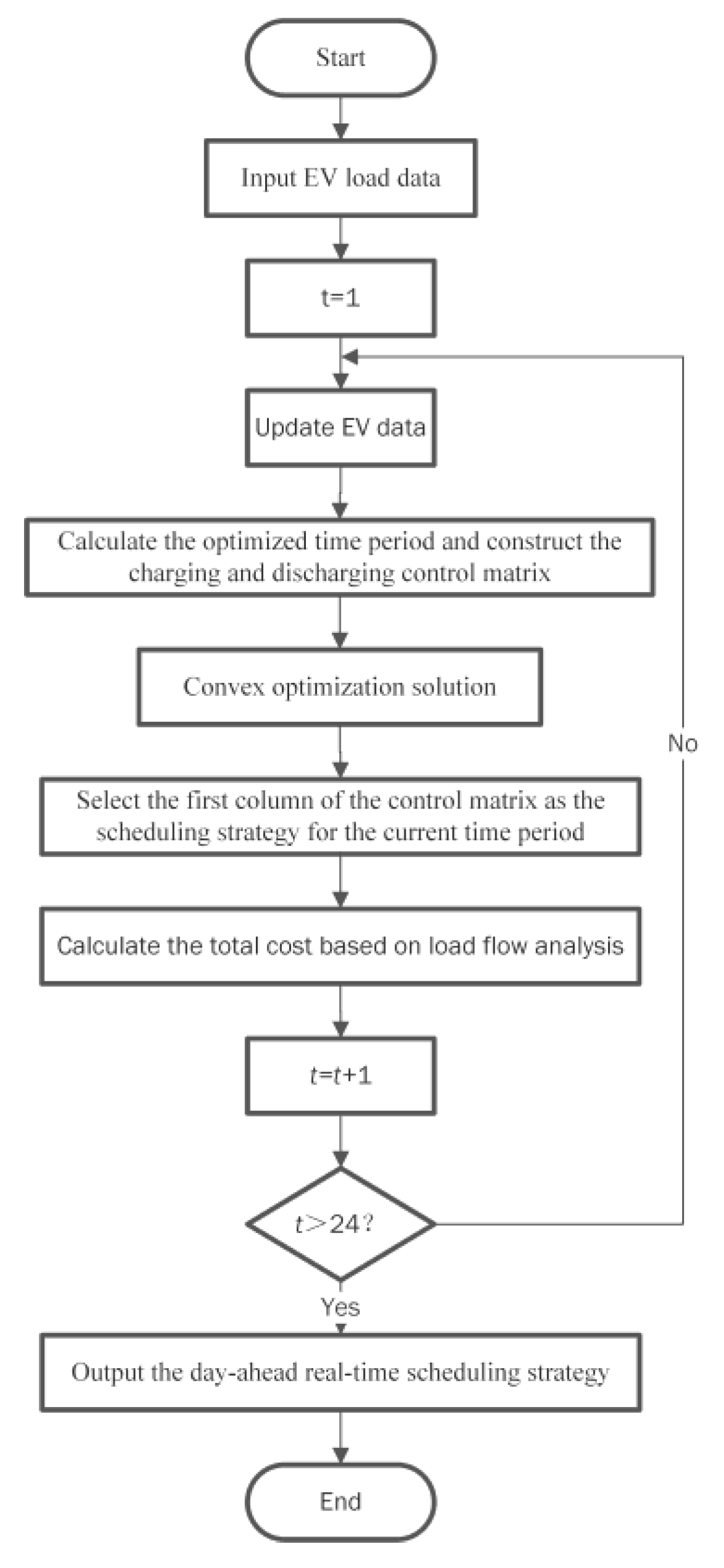
4.5.2. Lower-Level Solution
5. Numerical Example Analysis
5.1. Fundamental Data
5.2. Case Simulation and Analysis
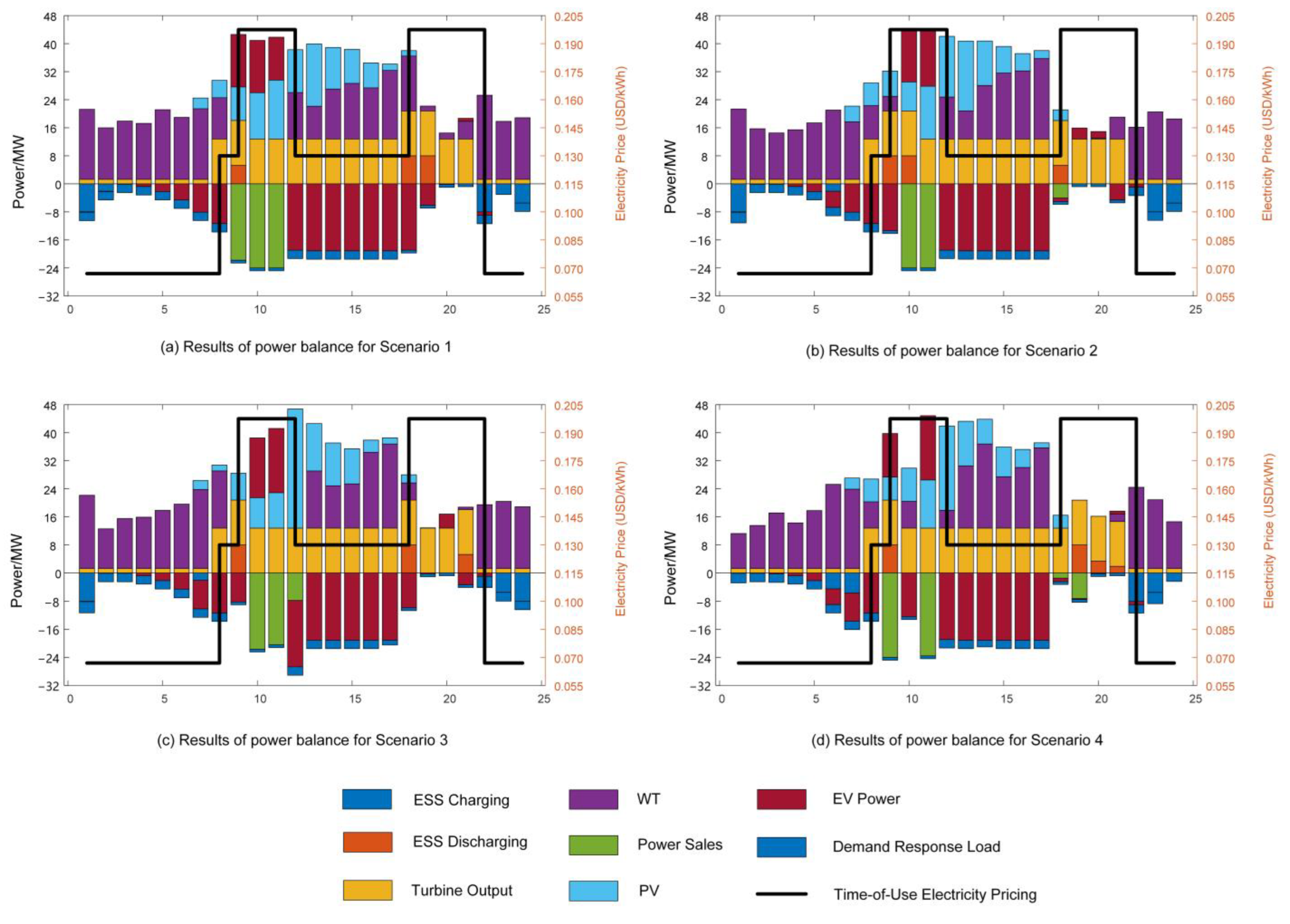
5.2.1. Analysis of Scheduling Results Under Different Scenarios
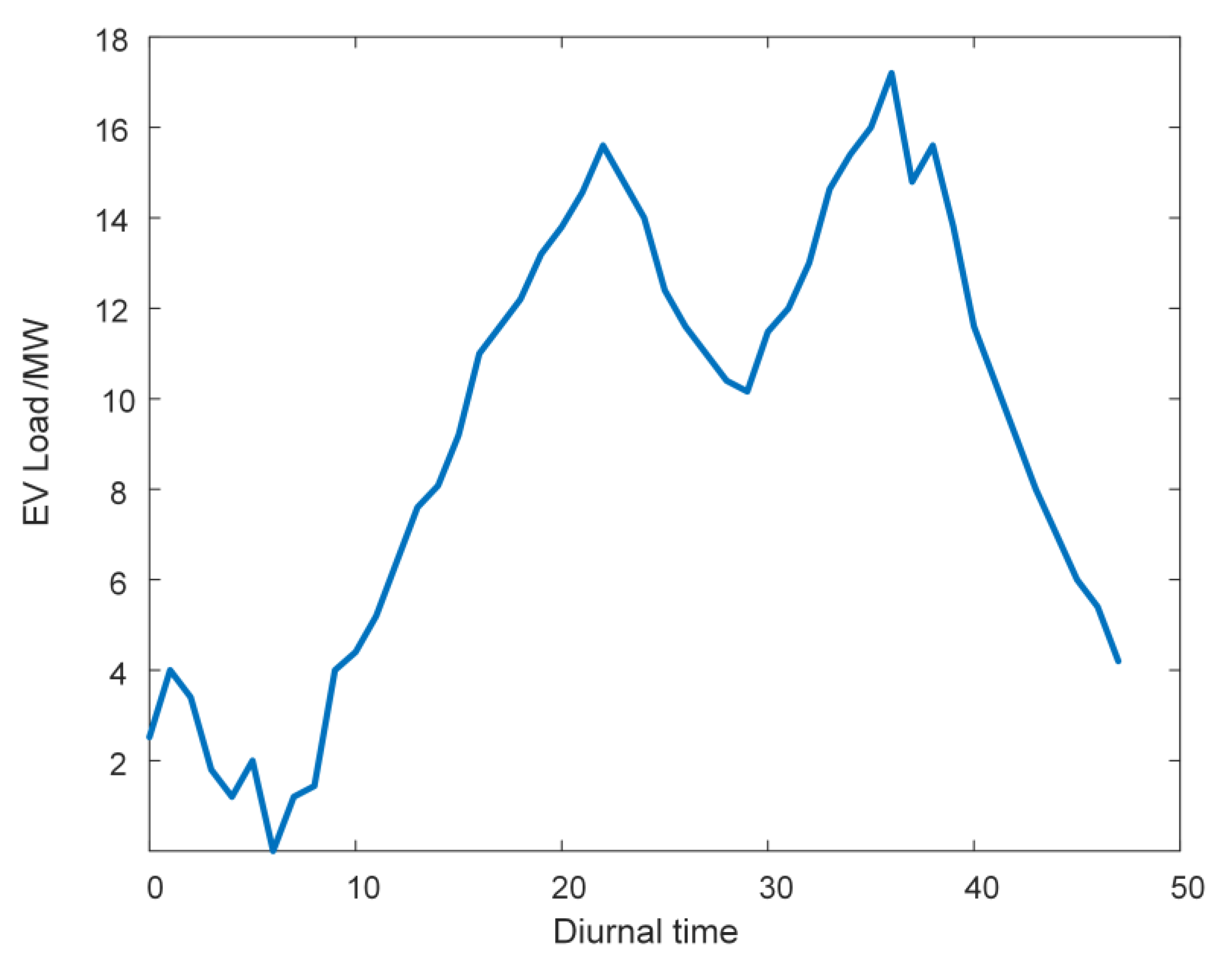
5.2.2. Analysis of Electric Vehicle Charging and Discharging Behavior
5.2.3. Sensitivity Analysis
6. Conclusions
- (1)
- The approach using kernel density estimation and Frank copula functions significantly decreases forecasting errors for wind and solar outputs in day-ahead scheduling. This method produces scenarios closely matching actual outputs, enhancing scheduling accuracy and minimizing cost losses from forecast inaccuracies. It provides a solid foundation for power system operations and market transactions, improving demand response and facilitating the integration of renewable energy.
- (2)
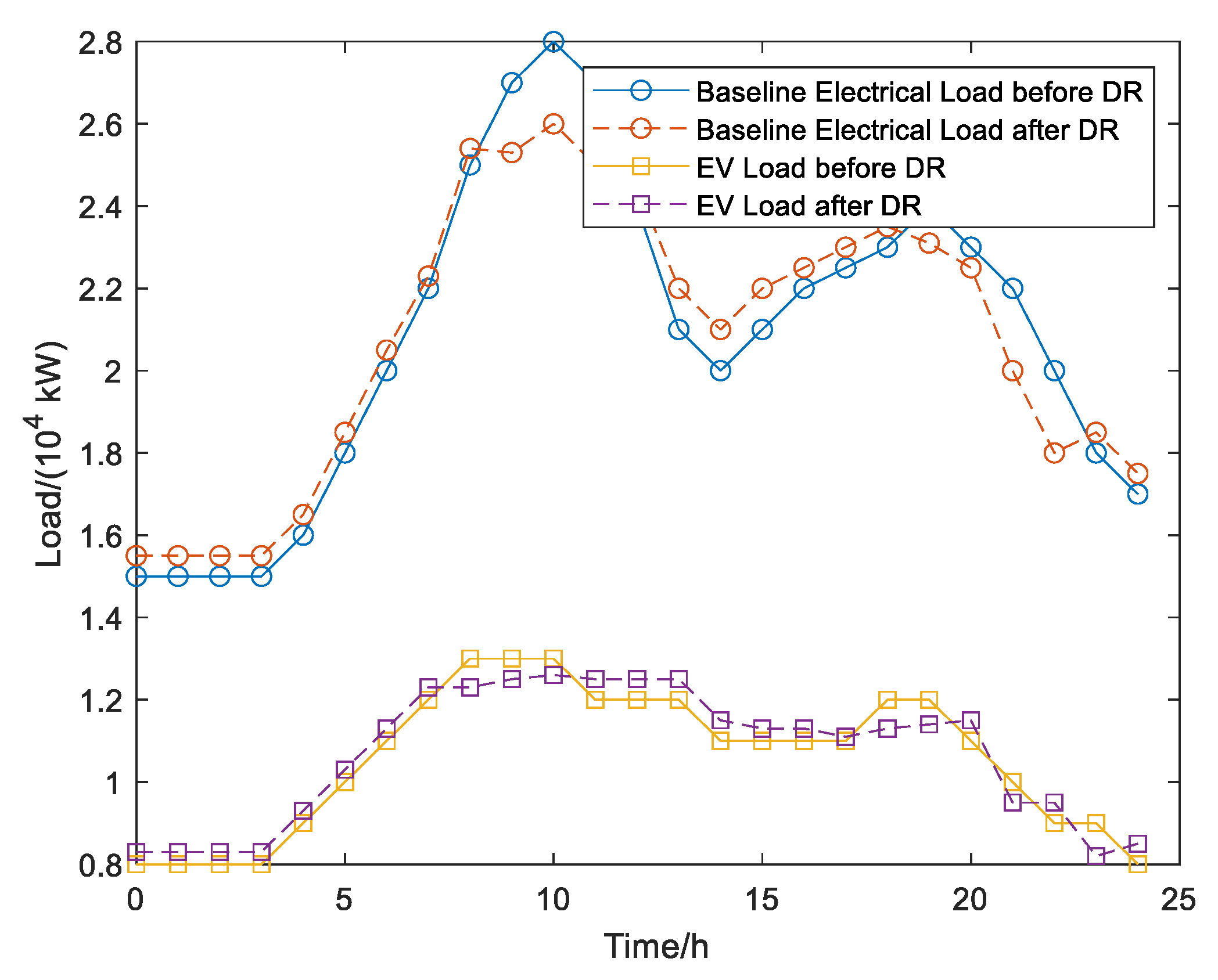
- The integration of comprehensive demand response leads to a reduction in the microgrid’s maximum total load from 41.366 MW to 38.523 MW, while the minimum total load rises from 23.163 MW to 23.859 MW, optimizing the load peak-to-valley difference to 14.664 MW, a decrease of 19.44%. The effects of comprehensive demand response contribute to stabilizing load fluctuations, establishing a robust basis for real-time scheduling of EV charging and discharging.
- (3)
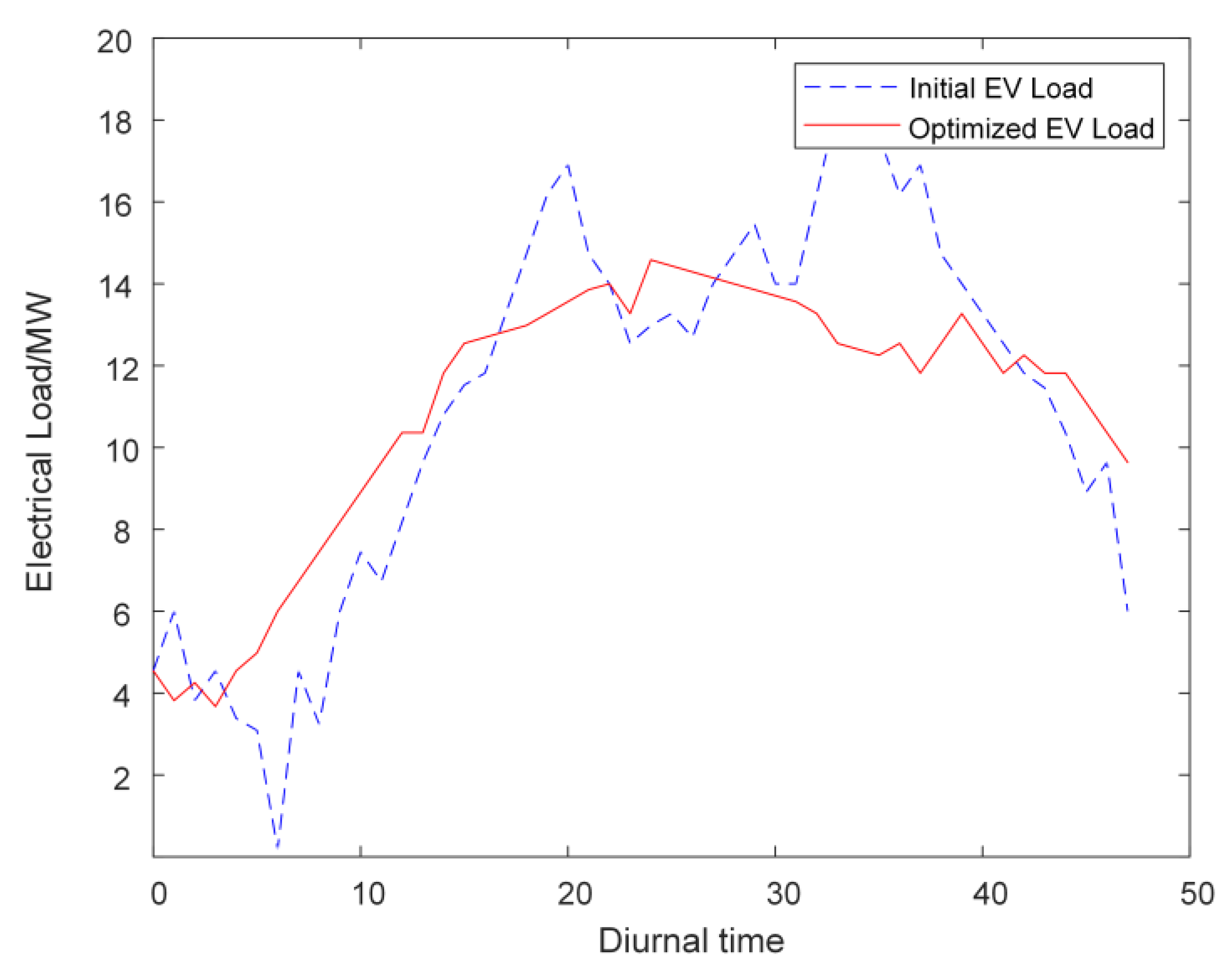
- The bi-level optimization scheduling model presented in this paper, which integrates V2G technology, effectively synchronizes the charging and discharging activities of EVs with the microgrid’s energy supply and demand. The orderly EV charging strategy adopted after scheduling substantially diminishes grid load fluctuations, enabling peak shaving and valley filling. This flexibility enhances energy scheduling and distribution, ultimately improving the energy efficiency and economic sustainability of the grid.
7. Future Research Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.D.; Chen, S.J.; Wu, Y.Q.; Wang, Q.H.; Liu, X.; Qi, L.J.; Lu, X.Y.; Gao, L. How to make better use of intermittent and variable energy? A review of wind and photovoltaic power consumption in China. Renew. Sustain. Energy Rev. 2021, 137, 110626. [Google Scholar] [CrossRef]
- Li, Z.L.; Li, P.; Yuan, Z.P.; Xia, J.; Tian, D. Optimized utilization of distributed renewable energies for island microgrid clusters considering solar-wind correlation. Electr. Power Syst. Res. 2022, 206, 107822. [Google Scholar] [CrossRef]
- Yu, H.; Niu, S.Y.; Shang, Y.T.; Shao, Z.Y.; Jia, Y.W.; Jian, L.N. Electric vehicles integration and vehicle-to-grid operation in active distribution grids: A comprehensive review on power architectures, grid connection standards and typical applications. Renew. Sustain. Energy Rev. 2022, 168, 112812. [Google Scholar] [CrossRef]
- Hoicka, C.E.; Rowlands, I.H. Solar and wind resource complementarity: Advancing options for renewable electricity integration in Ontario, Canada. Renew. Energy 2011, 36, 97–107. [Google Scholar] [CrossRef]
- Lin, S.F.; Liu, C.T.; Shen, Y.W.; Li, F.X.; Li, D.D.; Fu, Y. Stochastic Planning of Integrated Energy System via Frank-Copula Function and Scenario Reduction. IEEE Trans. Smart Grid 2022, 13, 202–212. [Google Scholar] [CrossRef]
- Li, K.; Duan, P.F.; Xue, Q.W.; Cheng, Y.D.; Hua, J.; Chen, J.L.; Guo, P.H. Enhancing reliability assessment in distributed generation networks: Incorporating dynamic correlation of wind-solar power output uncertainty. Sustain. Energy Grids Netw. 2024, 39, 101505. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, X.G.; Yi, C.Z.; Li, Z.B.; Xu, D.G. A Novel Shared Energy Storage Planning Method Considering the Correlation of Renewable Uncertainties on the Supply Side. IEEE Trans. Sustain. Energy 2022, 13, 2051–2063. [Google Scholar] [CrossRef]
- Zhao, M.Z.; Wang, Y.M.; Wang, X.B.; Chang, J.X.; Zhou, Y.; Liu, T. Modeling and Simulation of Large-Scale Wind Power Base Output Considering the Clustering Characteristics and Correlation of Wind Farms. Front. Energy Res. 2022, 10, 810082. [Google Scholar] [CrossRef]
- Zhou, H.; Wu, H.H.; Ye, C.J.; Xiao, S.J.; Zhang, J.; He, X.; Wang, B. Integration Capability Evaluation of Wind and Photovoltaic Generation in Power Systems Based on Temporal and Spatial Correlations. Energies 2019, 12, 171. [Google Scholar] [CrossRef]
- Ru, Y.; Wang, Y.; Mao, W.J.; Zheng, D.; Fang, W.Q. Dynamic Environmental Economic Dispatch Considering the Uncertainty and Correlation of Photovoltaic-Wind Joint Power. Energies 2024, 17, 6247. [Google Scholar] [CrossRef]
- Sun, L.; Xu, Q.S.; Chen, X.; Fan, Y.K. Day-ahead economic dispatch of microgrid based on game theory. Energy Rep. 2020, 6, 633–638. [Google Scholar] [CrossRef]
- Leng, C.M.; Yang, H.; Song, Y.K.; Yu, Z.T.; Shen, C. Expected value model of microgrid economic dispatching considering wind power uncertainty. Energy Rep. 2023, 9, 291–298. [Google Scholar] [CrossRef]
- Huo, Y.C.; Bouffard, F.; Joós, G. Decision tree-based optimization for flexibility management for sustainable energy microgrids. Appl. Energy 2021, 290, 116772. [Google Scholar] [CrossRef]
- Du, X.D.; Wang, L.B.; Zhao, J.L.; He, Y.L.; Sun, K. Power Dispatching of Multi-Microgrid Based on Improved CS Aiming at Economic Optimization on Source-Network-Load-Storage. Electronics 2022, 11, 2742. [Google Scholar] [CrossRef]
- He, Y.L.; Wu, X.W.; Sun, K.; Liu, X.Y.; Wang, H.P.; Zeng, S.M.; Zhang, Y. A Novel MOWSO algorithm for Microgrid multi-objective optimal dispatch. Electr. Power Syst. Res. 2024, 232, 110374. [Google Scholar] [CrossRef]
- Lei, X.; Huang, T.; Yang, Y.; Fang, Y.; Wang, P. A Bi-Layer Multi-Time Coordination Method for Optimal Generation and Reserve Schedule and Dispatch of a Grid-Connected Microgrid. IEEE Access 2019, 7, 44010–44020. [Google Scholar] [CrossRef]
- Du, J.L.; Hu, W.H.; Zhang, S.; Liu, W.; Zhang, Z.Y.; Wang, D.J.; Chen, Z. A multi-objective robust dispatch strategy for renewable energy microgrids considering multiple uncertainties. Sustain. Cities Soc. 2024, 116, 105918. [Google Scholar] [CrossRef]
- Jiang, H.Y.; Ning, S.Y.; Ge, Q.B. Multi-Objective Optimal Dispatching of Microgrid With Large-Scale Electric Vehicles. IEEE Access 2019, 7, 145880–145888. [Google Scholar] [CrossRef]
- Hakimi, S.M.; Moghaddas-Tafreshi, S.M. Effect of plug-in hybrid electric vehicles charging/discharging management on planning of smart microgrid. J. Renew. Sustain. Energy 2012, 4, 063144. [Google Scholar] [CrossRef]
- Wu, T.; Yang, Q.; Bao, Z.J.; Yan, W.J. Coordinated Energy Dispatching in Microgrid With Wind Power Generation and Plug-in Electric Vehicles. IEEE Trans. Smart Grid 2013, 4, 1453–1463. [Google Scholar] [CrossRef]
- Shi, R.F.; Li, S.P.; Zhang, P.H.; Lee, K.Y. Integration of renewable energy sources and electric vehicles in V2G network with adjustable robust optimization. Renew. Energy 2020, 153, 1067–1080. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Wang, Z.Y.; Lu, Z.Y. Multi-objective load dispatch for microgrid with electric vehicles using modified gravitational search and particle swarm optimization algorithm. Appl. Energy 2022, 306, 118018. [Google Scholar] [CrossRef]
- Wu, J.Q.; Zhang, Q.; Lu, Y.D.; Qin, T.X.; Bai, J.Y. Source-Load Coordinated Low-Carbon Economic Dispatch of Microgrid including Electric Vehicles. Sustainability 2023, 15, 15287. [Google Scholar] [CrossRef]
- Luo, Z.J.; Ren, H.; Xin, G.Y.; Xu, M.K.; Wang, F.; Zhang, Y.C. Optimal operation of microgrid with consideration of V2G’s uncertainty. Iet Gener. Transm. Distrib. 2024, 18, 289–302. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Guo, X.Z.; Zhang, C.; Liang, R.; Peng, T.; Yang, Y.; Wu, M.J.; Zhou, Y.X. Multi-strategy reference vector guided evolutionary algorithm and its application in multi-objective optimal scheduling of microgrid systems containing electric vehicles. J. Energy Storage 2024, 95, 112500. [Google Scholar] [CrossRef]
- Yu, J.; Feng, Q.Z.; Li, Y.; Cao, J.D. Stochastic Optimal Dispatch of Virtual Power Plant considering Correlation of Distributed Generations. Math. Probl. Eng. 2015, 2015, 135673. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.X.; Wang, X.F. Review on probabilistic forecasting of wind power generation. Renew. Sustain. Energy Rev. 2014, 32, 255–270. [Google Scholar] [CrossRef]
- Semeyutin, A.; O’Neill, R. A brief survey on the choice of parameters for: “Kernel density estimation for time series data”. N. Am. J. Econ. Financ. 2019, 50, 101038. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| /kWh | /kWh | /kW | /kW | Charging Efficiency | |||
|---|---|---|---|---|---|---|---|
| 52.5 | 52.5 | 7 | −7 | 1 | 1 | 1 | 0.95 |
| Scenario | Probability Value |
|---|---|
| 1 | 0.226 |
| 2 | 0.228 |
| 3 | 0.234 |
| 4 | 0.13 |
| 5 | 0.182 |
| Revenue (in USD) | Cost (in USD) | Profit (in USD) | |
|---|---|---|---|
| Scenario 1 | 25,362.06 | 27,175.79 | −1813.73 |
| Scenario 2 | 30,350.17 | 26,051.30 | 4298.86 |
| Scenario 3 | 42,333.98 | 38,444.69 | 3889.30 |
| Scenario 4 | 43,622.96 | 36,047.70 | 7575.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, Z.; Liu, X.; Zhang, Q.; Zhang, Y.; Wang, Z.; Zhang, Y.; Li, W. Consideration of Wind-Solar Uncertainty and V2G Mode of Electric Vehicles in Bi-Level Optimization Scheduling of Microgrids. Energies 2025, 18, 823. https://doi.org/10.3390/en18040823
Chang Z, Liu X, Zhang Q, Zhang Y, Wang Z, Zhang Y, Li W. Consideration of Wind-Solar Uncertainty and V2G Mode of Electric Vehicles in Bi-Level Optimization Scheduling of Microgrids. Energies. 2025; 18(4):823. https://doi.org/10.3390/en18040823
Chicago/Turabian StyleChang, Zezhou, Xinyuan Liu, Qian Zhang, Ying Zhang, Ziren Wang, Yuyuan Zhang, and Wei Li. 2025. "Consideration of Wind-Solar Uncertainty and V2G Mode of Electric Vehicles in Bi-Level Optimization Scheduling of Microgrids" Energies 18, no. 4: 823. https://doi.org/10.3390/en18040823
APA StyleChang, Z., Liu, X., Zhang, Q., Zhang, Y., Wang, Z., Zhang, Y., & Li, W. (2025). Consideration of Wind-Solar Uncertainty and V2G Mode of Electric Vehicles in Bi-Level Optimization Scheduling of Microgrids. Energies, 18(4), 823. https://doi.org/10.3390/en18040823