


Collaborative Control and Intelligent Optimization of a Lead–Bismuth Cooled Reactor Based on a Modified PSO Method

 and
and
Abstract
1. Introduction
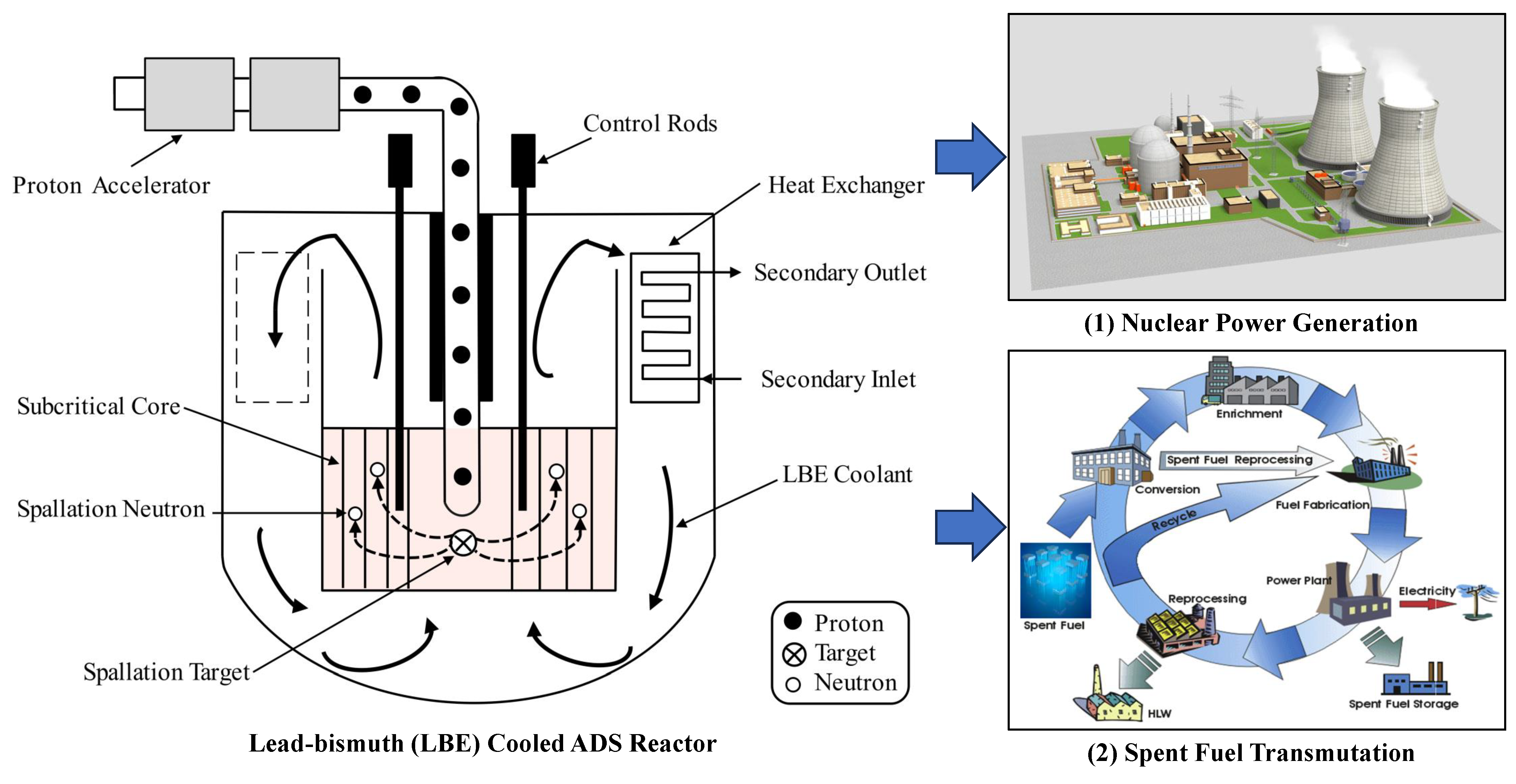
2. LBE-Cooled Reactor Dynamic Model
2.1. Space–Time Neutron Diffusion Model
2.2. Reactor Thermohydraulic Model
2.3. Heat Exchanger Dynamic Model
3. Collaborative Control and Intelligent Optimization Method
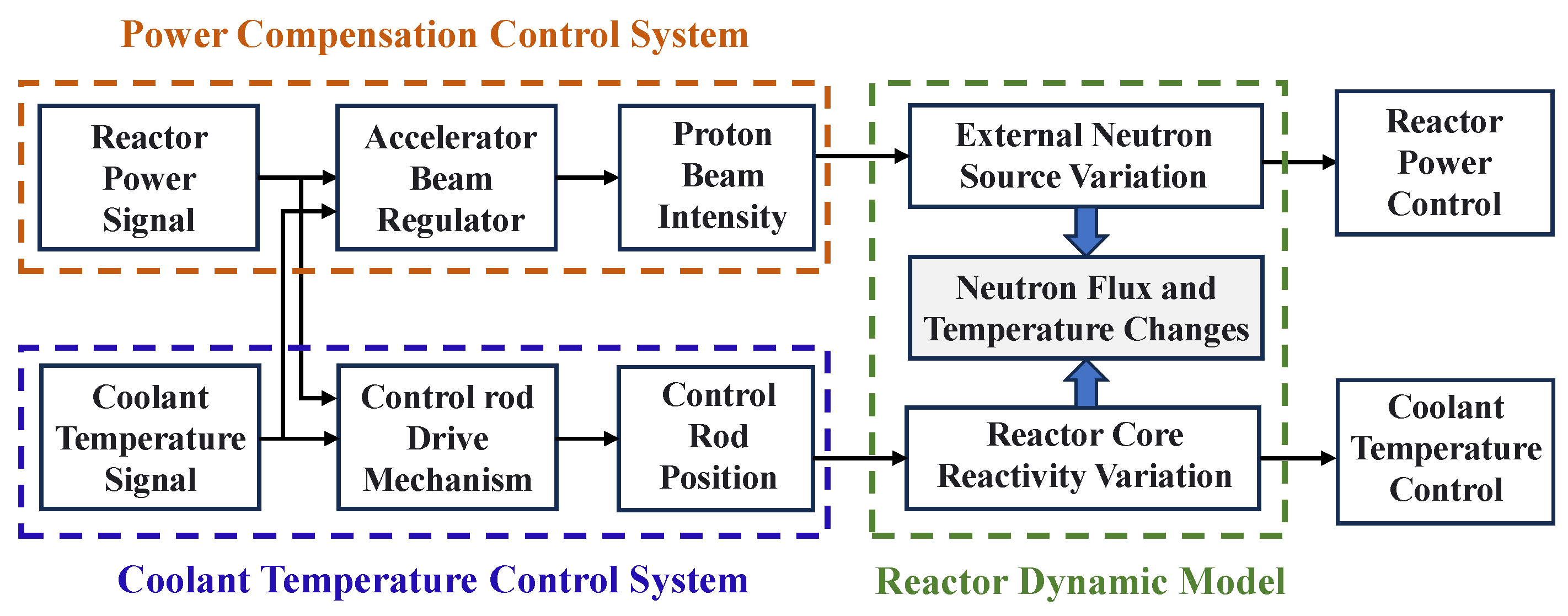
3.1. Collaborative Control Strategy
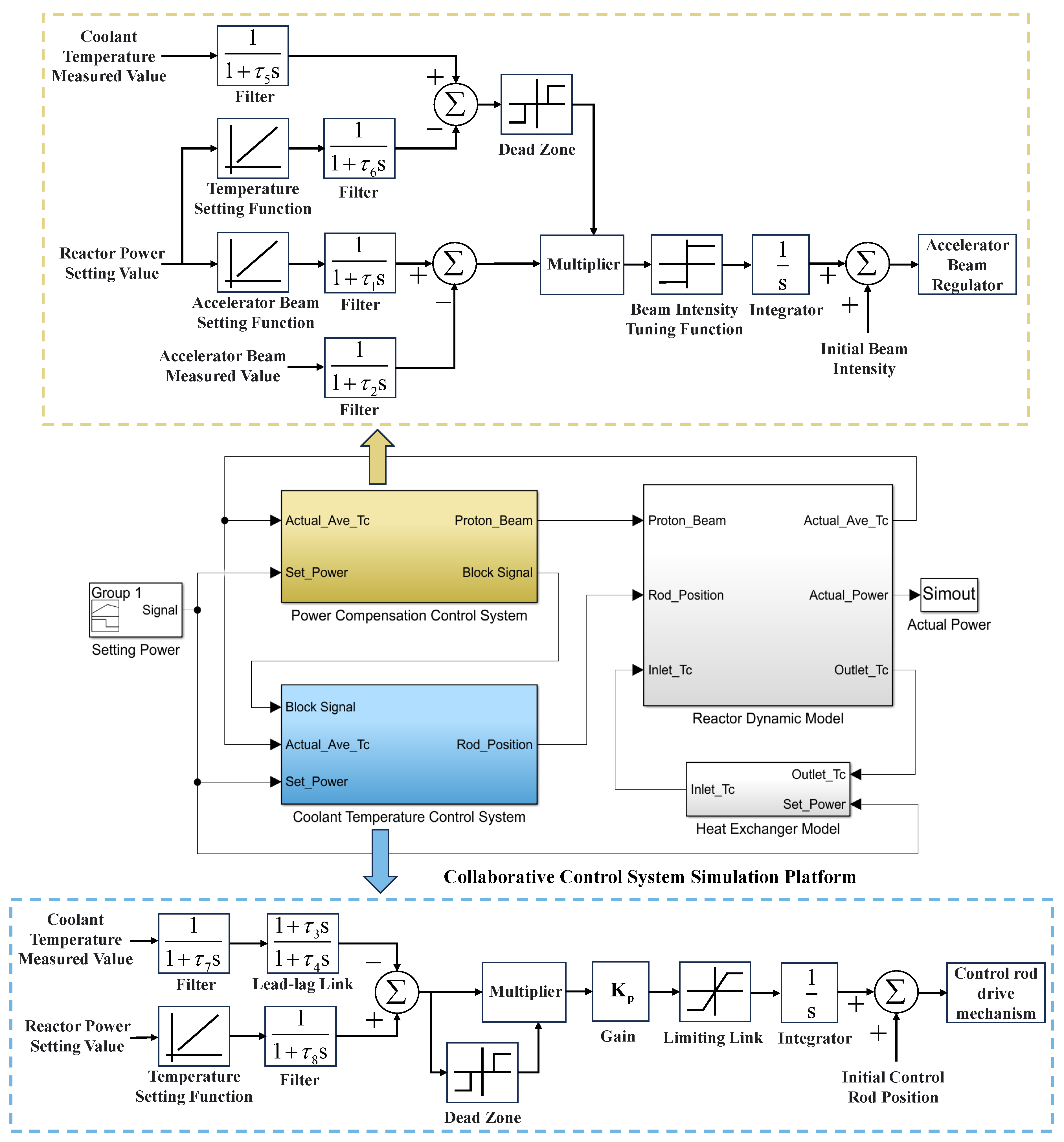
3.2. Collaborative Control System Design
3.2.1. Power Compensation Control System
3.2.2. Coolant Temperature Control System
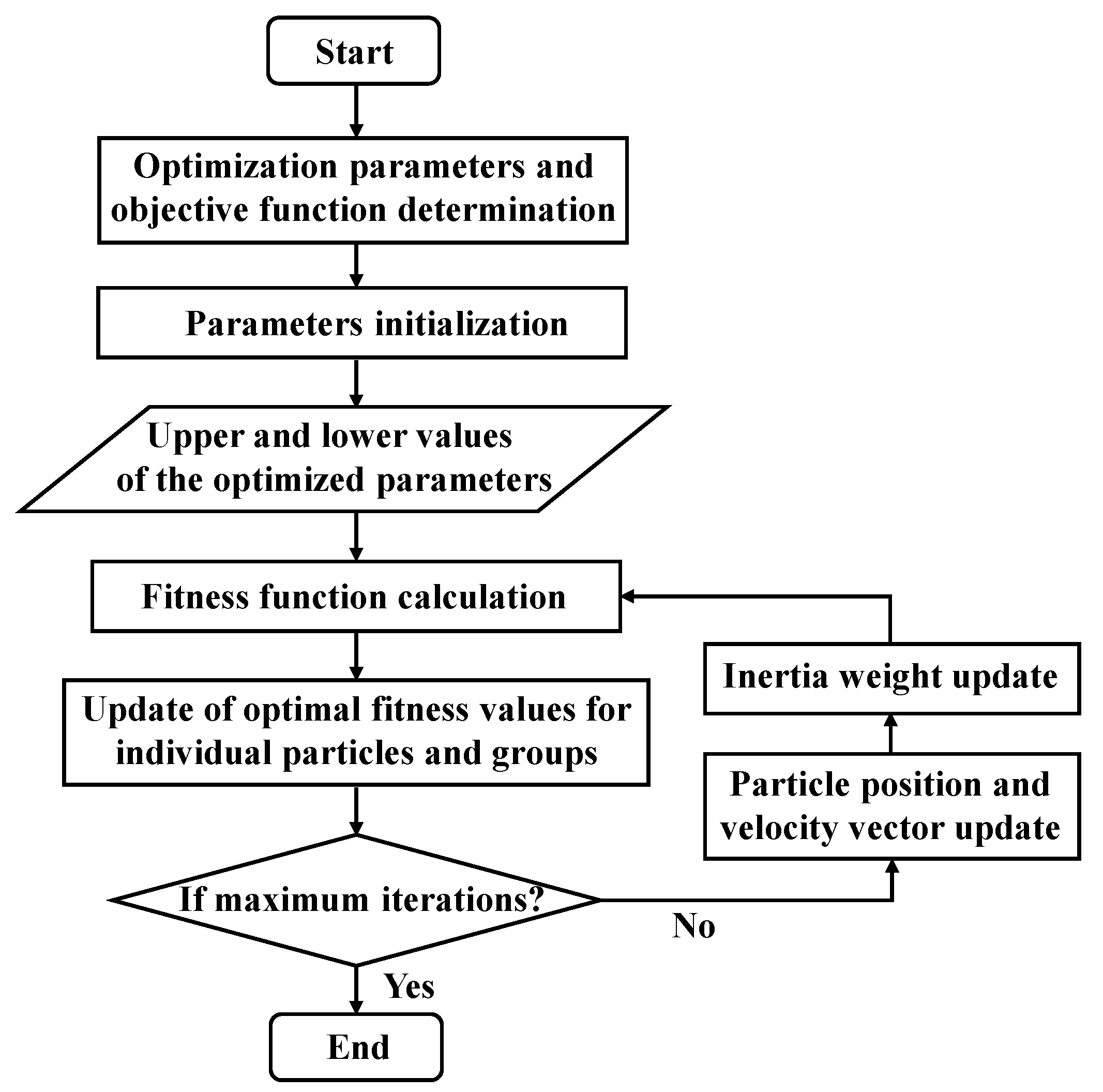
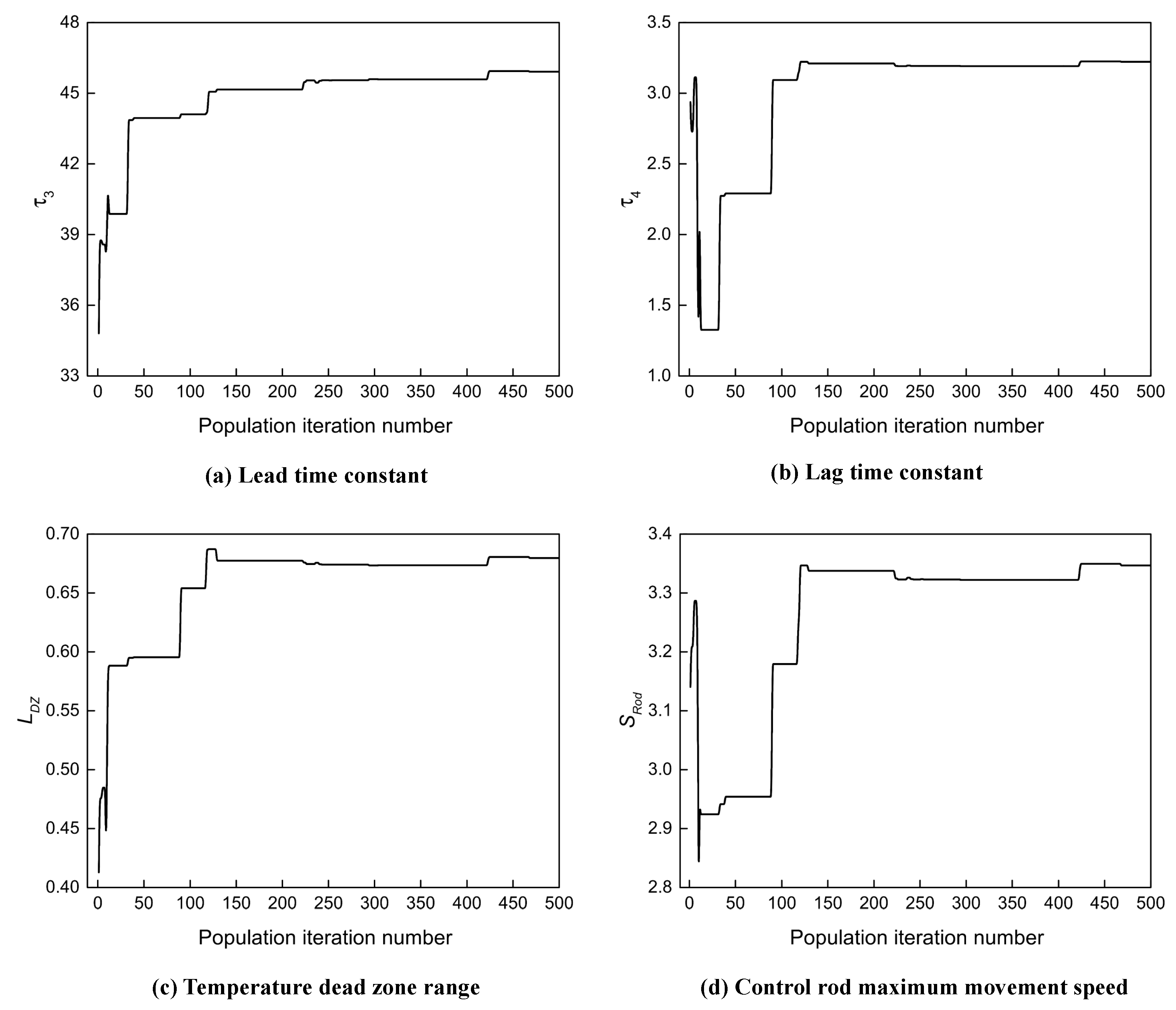
3.3. Controller Parameter Optimization Method
4. Results and Discussion
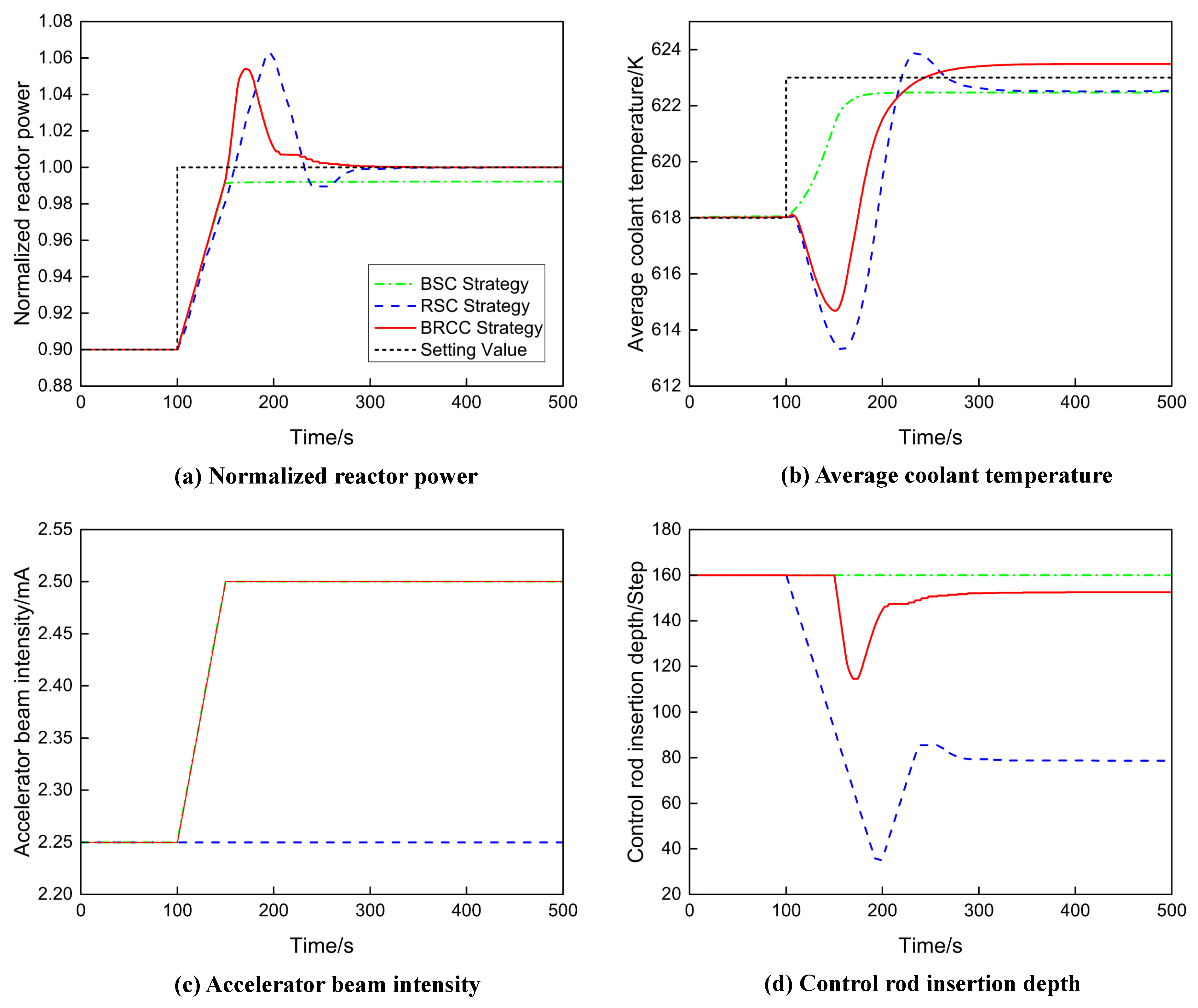
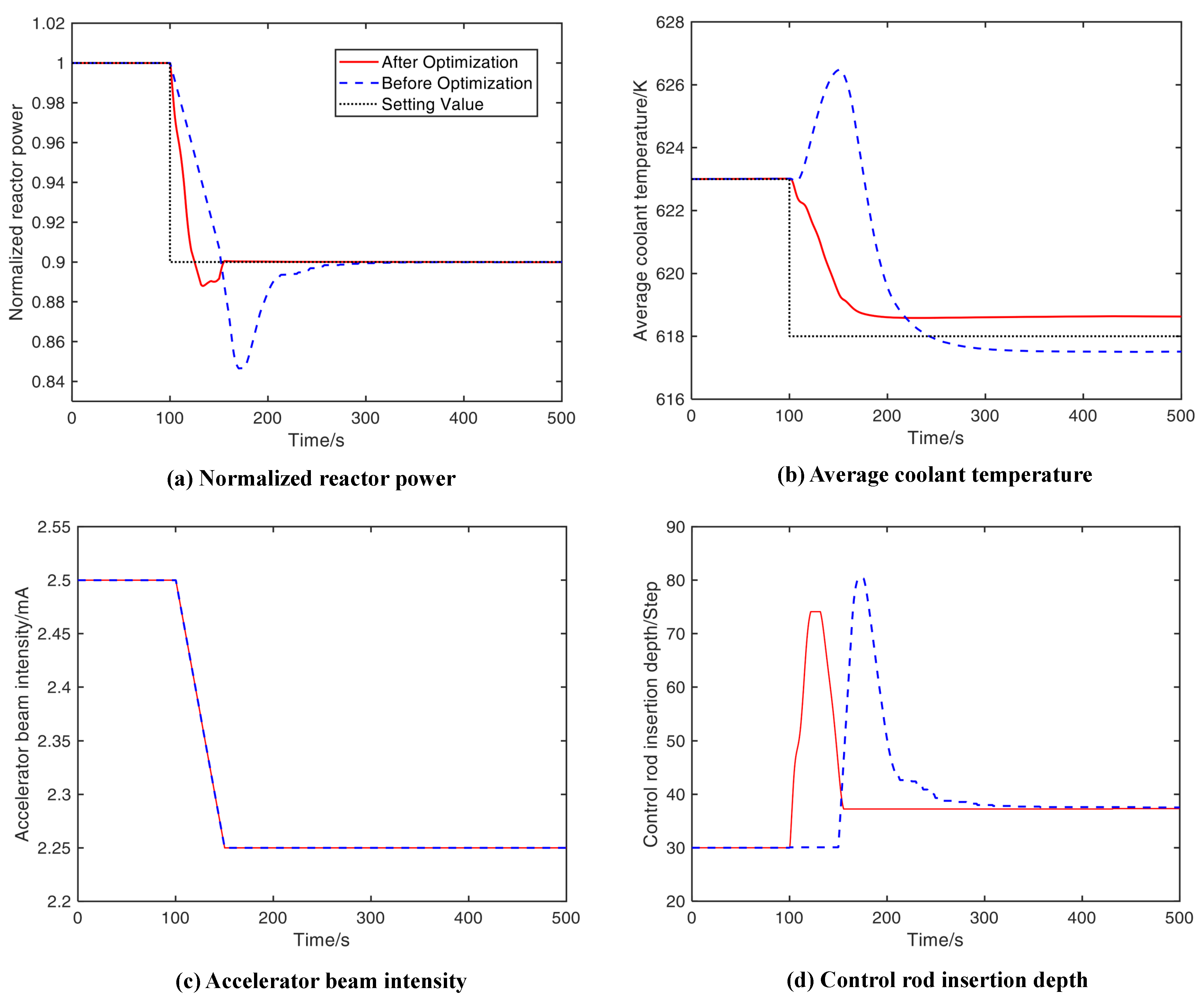
4.1. Step Load 10% FP Reduction
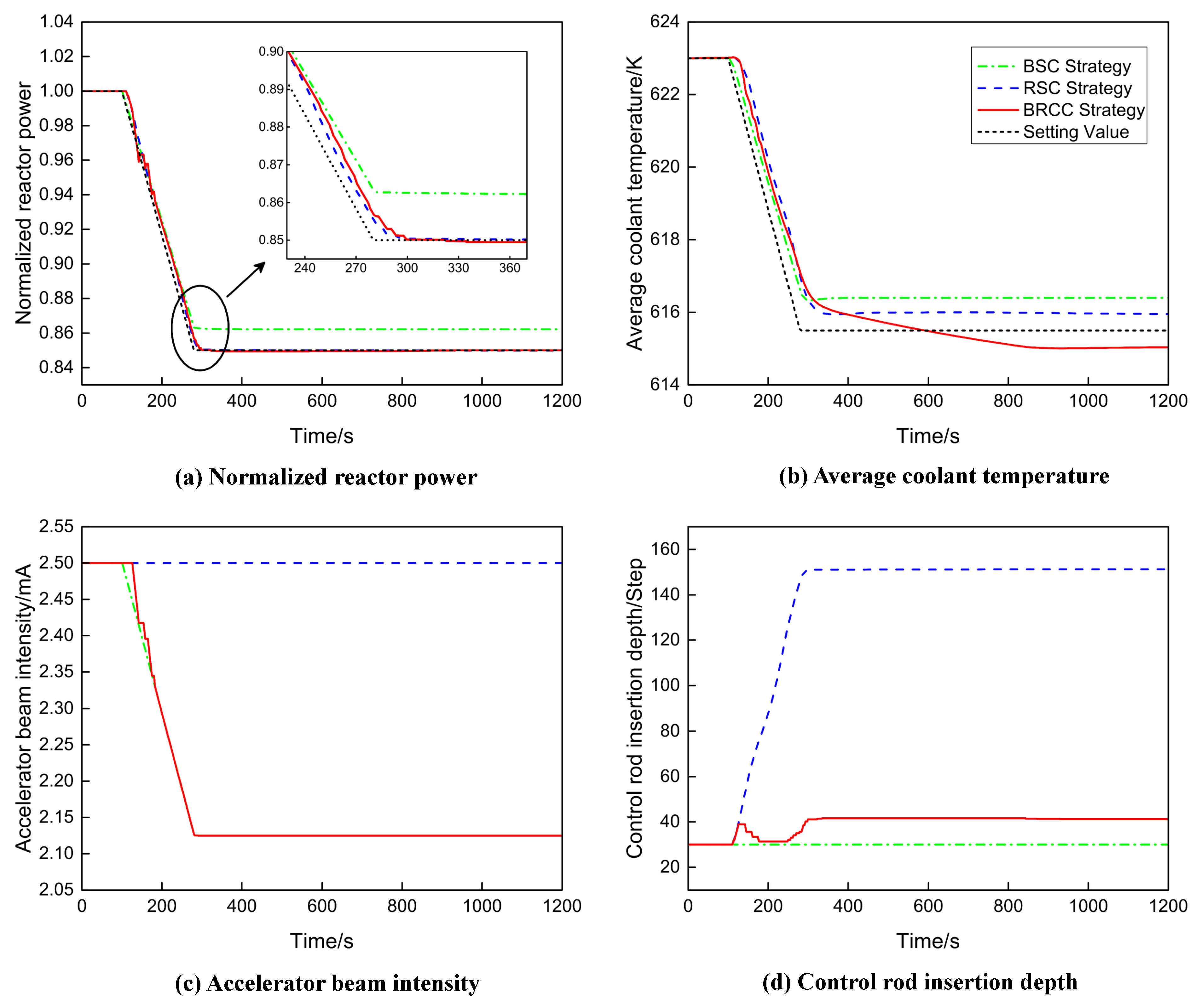
4.2. Step Load 10% FP Increase
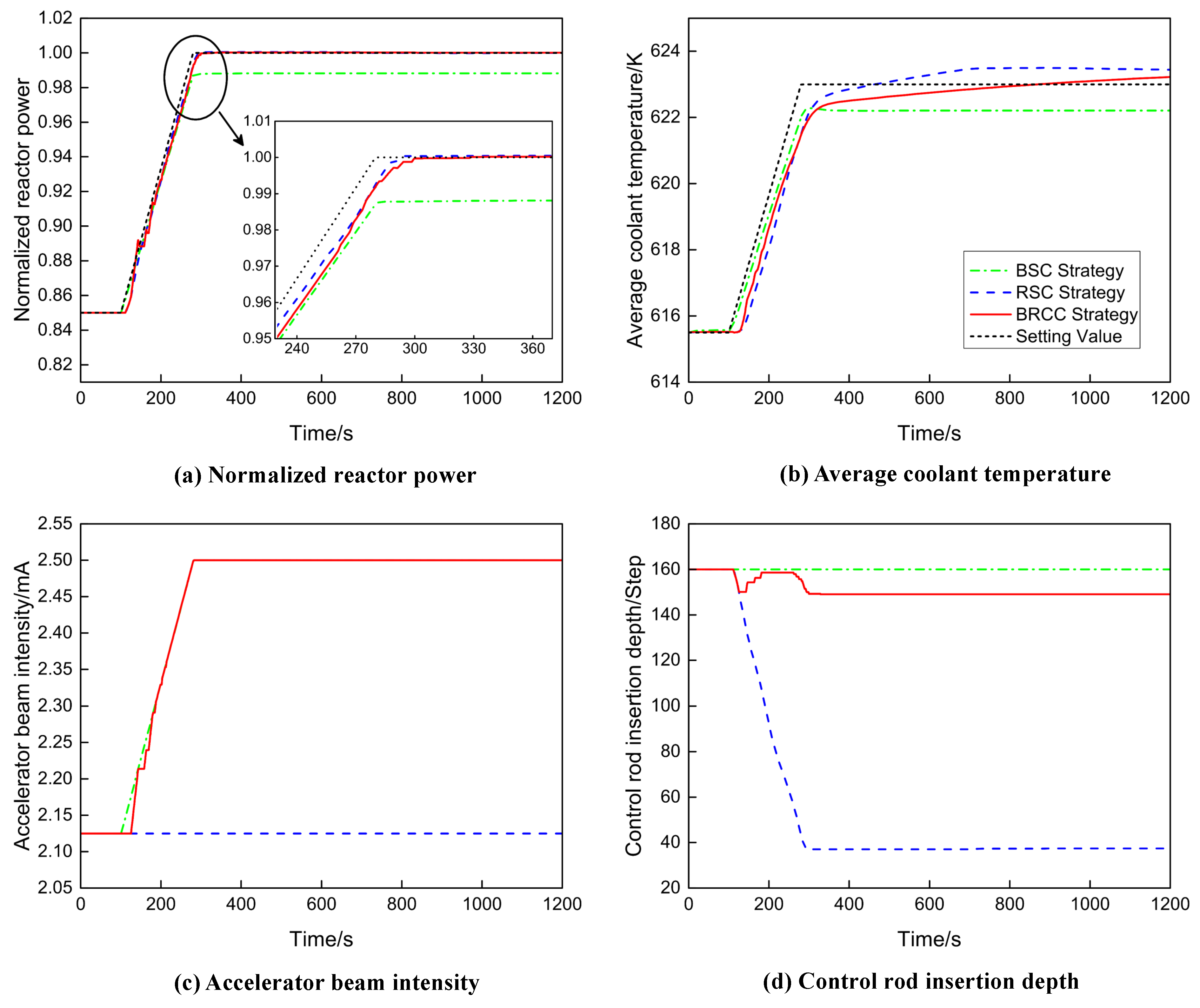
4.3. Linear Load 5% FP/min Reduction
4.4. Linear Load 5% FP/min Increase
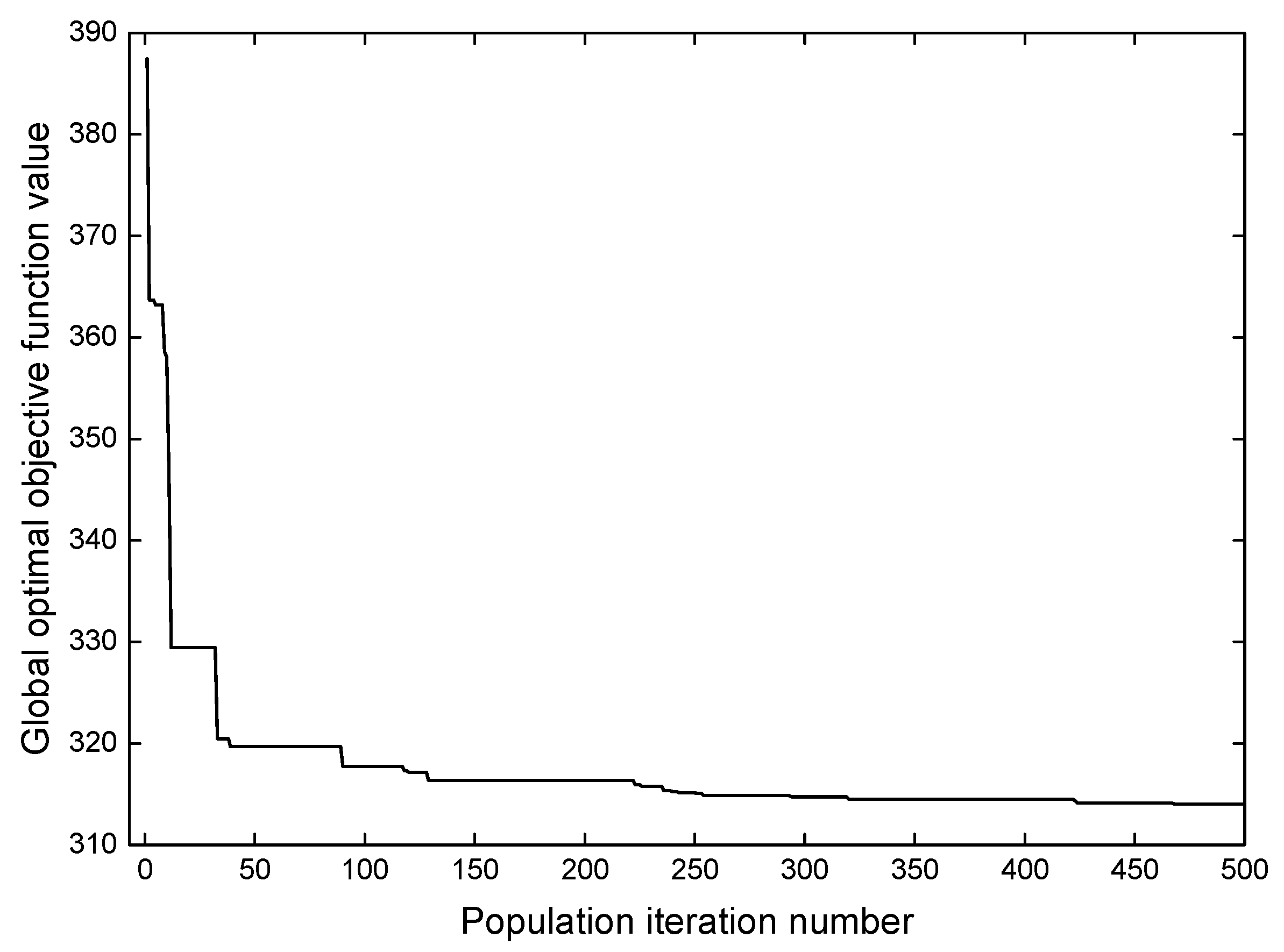
4.5. Controller Parameter Optimization Result
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alwaeli, M.; Mannheim, V. Investigation into the current state of nuclear energy and nuclear waste management—A state-of-the-art review. Energies 2022, 15, 4275. [Google Scholar] [CrossRef]
- Kooyman, T. Current state of partitioning and transmutation studies for advanced nuclear fuel cycles. Ann. Nucl. Energy 2021, 157, 108239. [Google Scholar] [CrossRef]
- Ma, Y.; Min, J.; Li, J.; Liu, S.; Liu, M.; Shang, X.; Yu, G.; Huang, S.; Yu, H.; Wang, K. Neutronics and thermal-hydraulics coupling analysis in accelerator-driven subcritical system. Prog. Nucl. Energy 2020, 122, 103235. [Google Scholar] [CrossRef]
- Gokhale, P.A.; Deokattey, S.; Kumar, V. Accelerator driven systems (ADS) for energy production and waste transmutation: International trends in R&D. Prog. Nucl. Energy 2006, 48, 91–102. [Google Scholar]
- Bianchi, F.; Artioli, C.; Burn, K.W.; Gherardi, G.; Monti, S.; Mansani, L.; Cinotti, L.; Struwe, D.; Schikorr, M.; Maschek, W.; et al. Status and trend of core design activities for heavy metal cooled accelerator driven system. Energy Convers. Manag. 2006, 47, 2698–2709. [Google Scholar] [CrossRef]
- Cinotti, L.; Giraud, B.; Abderrahim, H.A. The experimental accelerator driven system (XADS) designs in the EURATOM 5th framework programme. J. Nucl. Mater. 2004, 335, 148–155. [Google Scholar] [CrossRef]
- Abderrahim, H.A.; Baeten, P.; De Bruyn, D.; Fernandez, R. MYRRHA—A multi-purpose fast spectrum research reactor. Energy Convers. Manag. 2012, 63, 4–10. [Google Scholar] [CrossRef]
- Mansani, L.; Artioli, C.; Schikorr, M.; Rimpault, G.; Angulo, C.; Bruyn, D.D. The European Lead-Cooled EFIT Plant: An Industrial-Scale Accelerator-Driven System for Minor Actinide Transmutation—I. Nucl. Technol. 2012, 180, 241–263. [Google Scholar] [CrossRef]
- Van Tuyle, G.; Hill, D.; Beller, D.; Bishop, W.; Cotton, T.; Finck, P.; Halsey, W.; Herezeg, J.; Herring, J.; Lancaster, D.; et al. A roadmap for developing ATW technology: System scenarios & integration. Prog. Nucl. Energy 2001, 38, 3–23. [Google Scholar]
- Yang, W.S.; Khalil, H.S. Blanket design studies of a lead-bismuth eutectic-cooled accelerator transmutation of waste system. Nucl. Technol. 2001, 135, 162–182. [Google Scholar] [CrossRef]
- Tsujimoto, K.; Oigawa, H.; Ouchi, N.; Kikuchi, K.; Kurata, Y.; Mizumoto, M.; Sasa, T.; Saito, S.; Nishihara, K.; Umeno, M.; et al. Research and development program on accelerator driven subcritical system in JAEA. J. Nucl. Sci. Technol. 2007, 44, 483–490. [Google Scholar] [CrossRef]
- Park, W.S.; Shin, U.; Han, S.J.; Song, T.Y.; Choi, B.H.; Park, C.K. HYPER (Hybrid Power Extraction Reactor): A system for clean nuclear energy. Nucl. Eng. Des. 2000, 199, 155–165. [Google Scholar] [CrossRef]
- Loong, C.K.; Wei, J.; Guan, X.; Wang, X. The impact on science and technology of university-based, accelerator-driven, compact neutron and proton sources: A case in point in China. Phys. Procedia 2012, 26, 8–18. [Google Scholar] [CrossRef]
- Wu, Y. Design and R&D progress of China lead-based reactor for ADS research facility. Engineering 2016, 2, 124–131. [Google Scholar]
- Wang, G.; Gu, L.; Yun, D. Preliminary Multi-Physics Performance Analysis and Design Evaluation of UO2 Fuel for LBE-Cooled Subcritical Reactor of China Initiative Accelerator Driven System. Front. Energy Res. 2021, 9, 732801. [Google Scholar] [CrossRef]
- Li, J.Y.; Guo, S.M.; Gu, L.; Zhang, Y.P.; Xu, H.S.; Su, X.K.; Wang, Y.Q. Quantum evolutionary algorithm based power optimization control strategy for China initiative accelerator driven subcritical system. Ann. Nucl. Energy 2022, 166, 108678. [Google Scholar] [CrossRef]
- Zeng, W.; Li, J.; Hui, T.; Xie, J.; Yu, T. LQG/LTR controller with simulated annealing algorithm for CIADS core power control. Ann. Nucl. Energy 2020, 142, 107422. [Google Scholar] [CrossRef]
- Zeng, W.; Hui, T.; Xie, J.; Yu, T. Dynamic simulation of CIADS core power control based on the duty ratio of the proton beam. Prog. Nucl. Energy 2020, 125, 103390. [Google Scholar] [CrossRef]
- Cammi, A.; Luzzi, L.; Porta, A.A.; Ricotti, M.E. Modelling and control strategy of the Italian LBE-XADS. Prog. Nucl. Energy 2006, 48, 578–589. [Google Scholar] [CrossRef]
- Yan, S.; Fang, H.; Wang, P.; Sun, C.; Zhao, F.; Huang, H.; Wu, Y. Modeling and control strategy of the China accelerator driven subcritical reactor. Prog. Nucl. Energy 2014, 71, 179–187. [Google Scholar] [CrossRef]
- Li, J.Y.; Lin, H.; Gu, L.; Zhang, Y.P.; Du, J.L.; Wang, Y.Q.; Lin, C.; Zhou, X.C.; Wang, T. Reliability analysis of core power optimization control using Kalman filter for accelerator driven system based on reconfigurable computing. Ann. Nucl. Energy 2023, 192, 109959. [Google Scholar] [CrossRef]
- Li, J.Y.; Du, J.L.; Gu, L.; Zhang, Y.P.; Lin, C.; Wang, Y.Q.; Zhou, X.C.; Lin, H. The optimization study of core power control based on meta-heuristic algorithm for China initiative accelerator driven subcritical system. Nucl. Eng. Technol. 2023, 55, 452–459. [Google Scholar] [CrossRef]
- Li, X.; He, Y.; Ma, W.; Cui, W.; He, Z.; Zhou, D.; Zheng, H.; Yang, F.; Guo, Y.; Niu, H.; et al. Control strategy for the core power in an accelerator drive sub-critical system. Nucl. Eng. Technol. 2024; in press. [Google Scholar]
- Cinotti, L.; Gherardi, G. The Pb–Bi cooled XADS status of development. J. Nucl. Mater. 2002, 301, 8–14. [Google Scholar] [CrossRef]
- Luo, R.; Wang, P.; Wei, X.; Revankar, S.T.; Zhao, F. Development of Neutronics and Thermal-Hydraulics Coupled Code for Accelerator Driven Subcritical Systems. In Proceedings of the International Conference on Nuclear Engineering, London, UK, 22–26 July 2018; American Society of Mechanical Engineers: Houston, TX, USA, 2018; Volume 51463. Paper No: V004T15A004. [Google Scholar]
- Song, H.; Luo, R.; Wan, J.; Li, S.; Zhao, F. Development of a novel 1D coupled neutronics/thermal-hydraulics code and its verification on PWR rod ejection accident benchmark. Prog. Nucl. Energy 2016, 92, 197–210. [Google Scholar] [CrossRef]
- Safa, H.; Group, W.; Carluec, B. Requirements for the XADS Accelerator & The Technical Answers; PDS-XADS Report DEL/02/009; Ansaldo Energia: Genoa, Italy, 2002. [Google Scholar]
- Oka, Y.; Suzuki, K. Nuclear Reactor Kinetics and Plant Control; Springer: Tokyo, Japan, 2013; Volume 10. [Google Scholar]
- Luzzi, L.; Vettraino, F.; Calabrese, R. ADS-demo fuel rod performance analysis. In Proceedings of the Global Environment and Nuclear Energy Systems/Advanced Nuclear Power Plants International Conference (GENES4/ANP2003), Kyoto, Japan, 15–19 September 2003; p. 1155. [Google Scholar]
- Van den Eynde, G.; Malambu, E.; Stankovskiy, A.; Fernandez, R.; Baeten, P. An updated core design for the multi-purpose irradiation facility MYRRHA. J. Nucl. Sci. Technol. 2015, 52, 1053–1057. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1945–1950. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Luo, R.; Liu, C.; Macián-Juan, R. Investigation of control characteristics for a molten salt reactor plant under normal and accident conditions. Energies 2021, 14, 5279. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Population size | 15 | |
| Total number of iterations | 500 | |
| Individual learning factor | 2 | |
| Global learning factor | 2 | |
| Maximum inertia factor | 0.9 | |
| Minimum inertia factor | 0.4 | |
| Lead time constant range | 20–80 | |
| Particle maximum speed | 18 | |
| Lag time constant range | 1–5 | |
| Particle maximum speed | 1.2 | |
| Temperature dead zone range | 0.4–0.7 | |
| Particle maximum speed | 0.09 | |
| Control rod maximum speed range | 2.5–3.5 | |
| Particle maximum speed | 0.3 |
| Evaluation Indicators | Before Optimization | After Optimization |
|---|---|---|
| MSE | 4.78 | 1.23 |
| ITAE | 698.66 | 154.55 |
| Overshoot | 5.93 | 1.34 |
| Tuning time/s | 237 | 56 |
| Accelerator beam adjustment amount/mA | 0.25 | 0.25 |
| Control rod movement steps | 93 | 81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, S.; Zhou, L.; Song, L.; Guo, H.; Wu, J.; Luo, R.; Zhao, F. Collaborative Control and Intelligent Optimization of a Lead–Bismuth Cooled Reactor Based on a Modified PSO Method. Energies 2025, 18, 567. https://doi.org/10.3390/en18030567
Yan S, Zhou L, Song L, Guo H, Wu J, Luo R, Zhao F. Collaborative Control and Intelligent Optimization of a Lead–Bismuth Cooled Reactor Based on a Modified PSO Method. Energies. 2025; 18(3):567. https://doi.org/10.3390/en18030567
Chicago/Turabian StyleYan, Shoujun, Lijie Zhou, Lifeng Song, Huiyu Guo, Junliang Wu, Run Luo, and Fuyu Zhao. 2025. "Collaborative Control and Intelligent Optimization of a Lead–Bismuth Cooled Reactor Based on a Modified PSO Method" Energies 18, no. 3: 567. https://doi.org/10.3390/en18030567
APA StyleYan, S., Zhou, L., Song, L., Guo, H., Wu, J., Luo, R., & Zhao, F. (2025). Collaborative Control and Intelligent Optimization of a Lead–Bismuth Cooled Reactor Based on a Modified PSO Method. Energies, 18(3), 567. https://doi.org/10.3390/en18030567