
Transfer Learning for Induction Motor Health Monitoring: A Brief Review


Abstract
1. Introduction
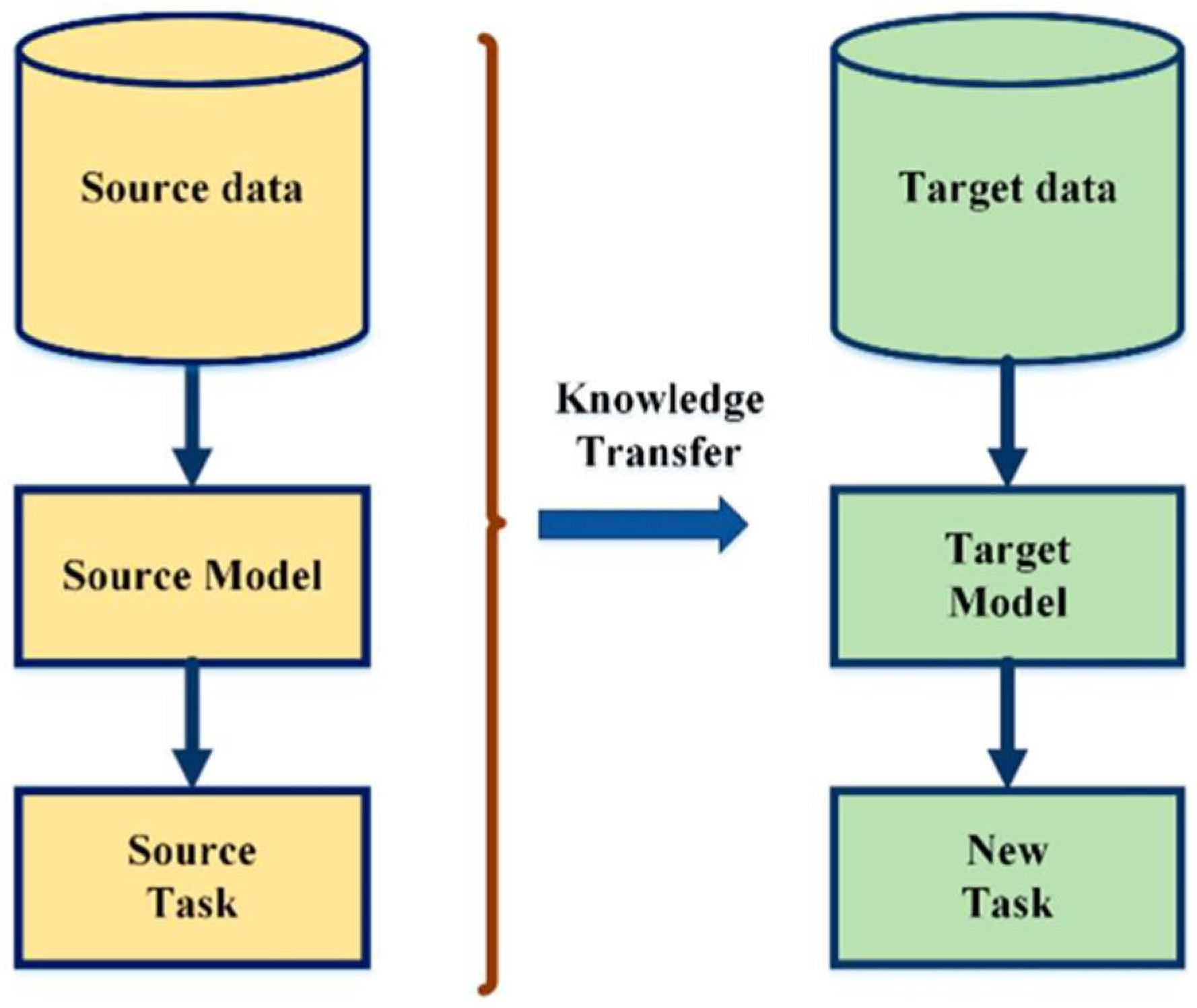
2. Fundamentals of Transfer Learning
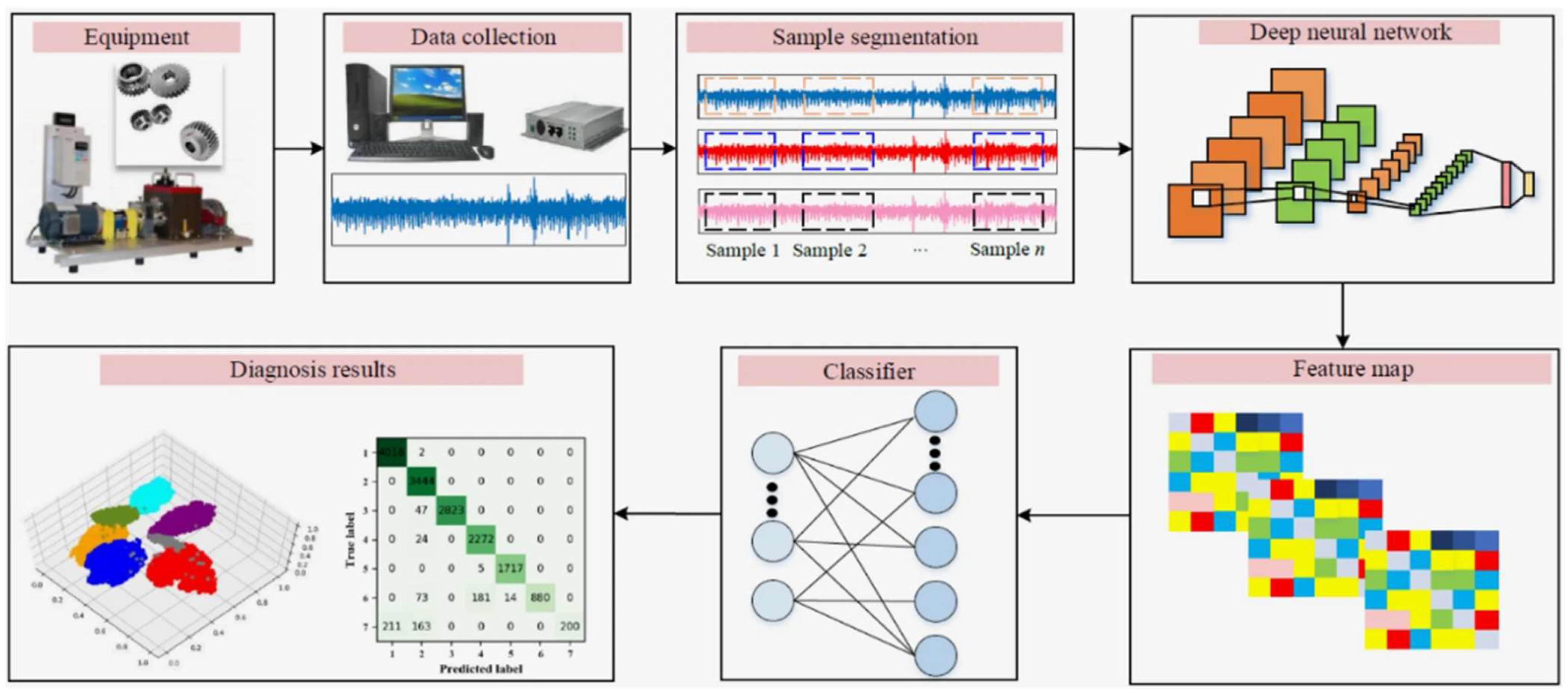
3. Overview of Motor Health Monitoring
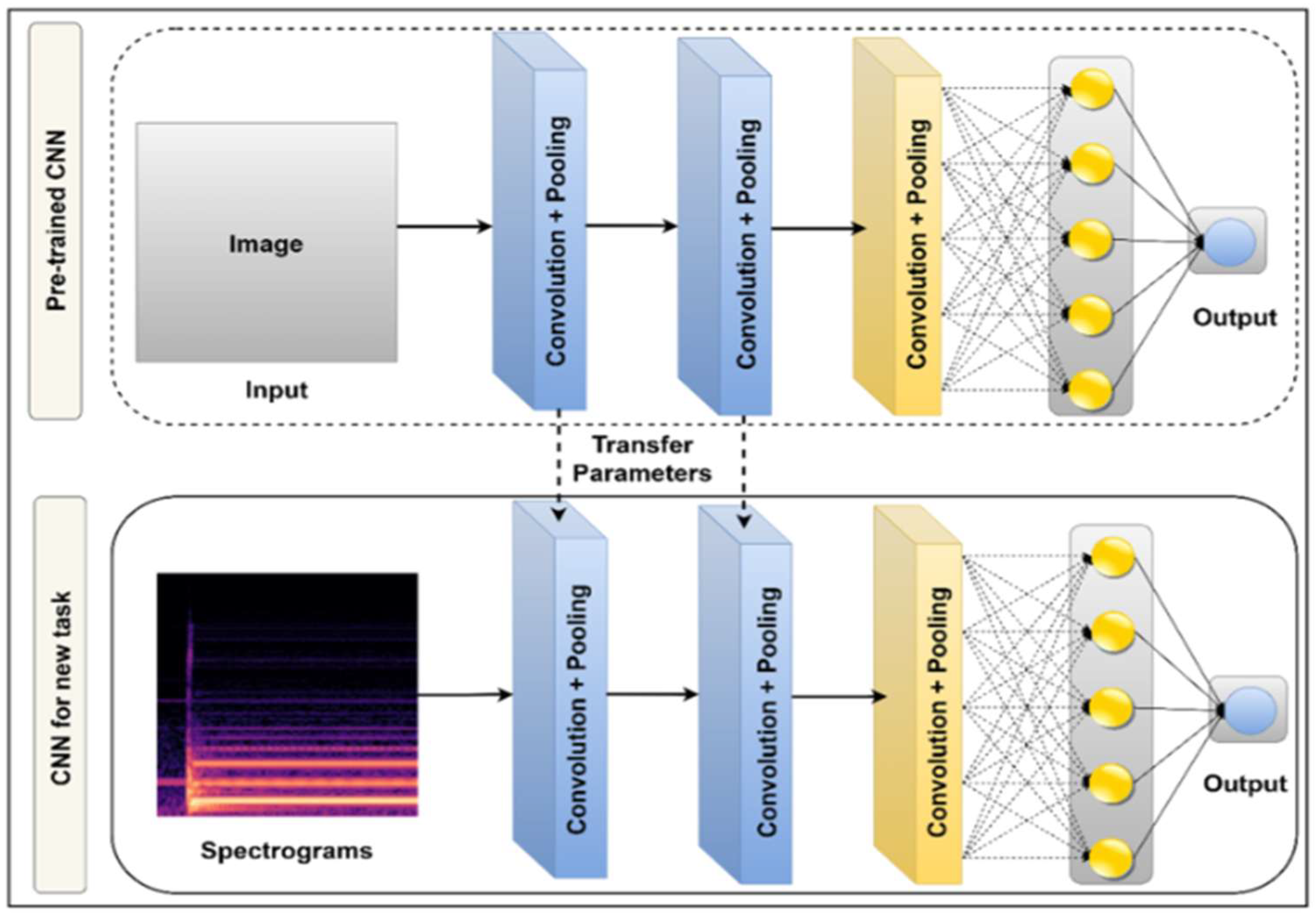
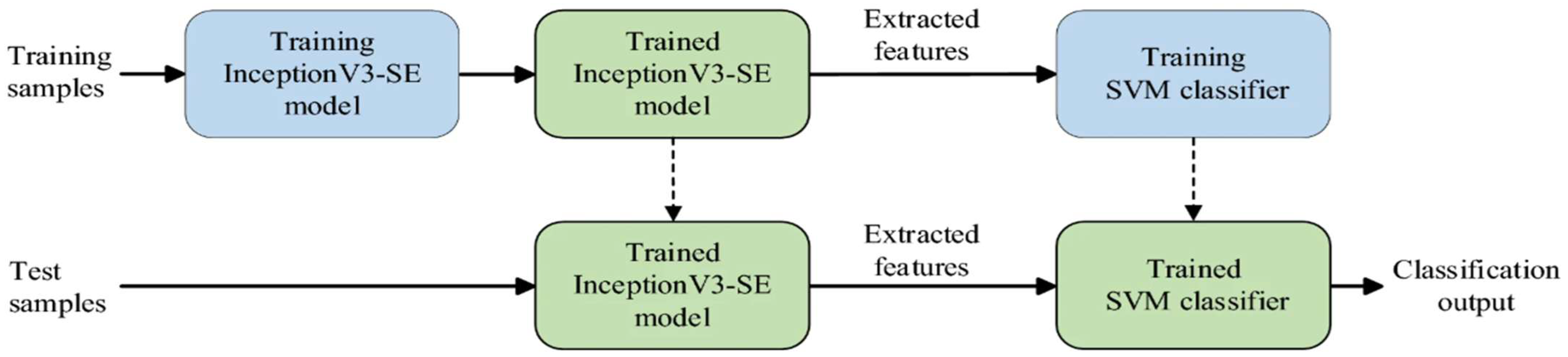
4. Transfer Learning in Motor Health Monitoring
5. Emerging Trends and Future Directions
5.1. Emerging Trends
5.2. Future Directions
6. Conclusions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Trzynadlowski, A.M. The Field Orientation Principle in Control of Induction Motors; Springer Science & Business Media: Berlin, Germany, 2013; ISBN 978-1-4615-2730-5. [Google Scholar]
- Zhang, P.; Du, Y.; Habetler, T.G.; Lu, B. A Survey of Condition Monitoring and Protection Methods for Medium-Voltage Induction Motors. IEEE Trans. Ind. Appl. 2011, 47, 34–46. [Google Scholar] [CrossRef]
- Konar, P.; Chattopadhyay, P. Bearing Fault Detection of Induction Motor Using Wavelet and Support Vector Machines (SVMs). Appl. Soft Comput. 2011, 11, 4203–4211. [Google Scholar] [CrossRef]
- Pandarakone, S.E.; Mizuno, Y.; Nakamura, H. Distinct Fault Analysis of Induction Motor Bearing Using Frequency Spectrum Determination and Support Vector Machine. IEEE Trans. Ind. Appl. 2017, 53, 3049–3056. [Google Scholar] [CrossRef]
- Brusamarello, B.; Cardozo da Silva, J.C.; de Morais Sousa, K.; Guarneri, G.A. Bearing Fault Detection in Three-Phase Induction Motors Using Support Vector Machine and Fiber Bragg Grating. IEEE Sens. J. 2023, 23, 4413–4421. [Google Scholar] [CrossRef]
- Jigyasu, R.; Shrivastava, V.; Singh, S. Smart Classifier Based Prognostics and Health Management of Induction Motor. Mater. Today Proc. 2021, 43, 355–361. [Google Scholar] [CrossRef]
- Tran, V.T.; Yang, B.-S.; Oh, M.-S.; Tan, A.C.C. Fault Diagnosis of Induction Motor Based on Decision Trees and Adaptive Neuro-Fuzzy Inference. Expert Syst. Appl. 2009, 36, 1840–1849. [Google Scholar] [CrossRef]
- Toma, R.N.; Prosvirin, A.E.; Kim, J.-M. Bearing Fault Diagnosis of Induction Motors Using a Genetic Algorithm and Machine Learning Classifiers. Sensors 2020, 20, 1884. [Google Scholar] [CrossRef]
- Euldji, R.; Bouamhdi, M.; Rebhi, R.; Bachene, M.; Ikumapayi, O.M.; Al-Dujaili, A.Q.; Abdulkareem, A.I.; Humaidi, A.J.; Menni, Y. Optimizing Condition Monitoring of Ball Bearings: An Integrated Approach Using Decision Tree and Extreme Learning Machine for Effective Decision-Making. Open Phys. 2023, 21, 20220239. [Google Scholar] [CrossRef]
- Briglia, G.; Immovilli, F.; Cocconcelli, M.; Lippi, M. Bearing Fault Detection and Recognition From Supply Currents with Decision Trees. IEEE Access 2024, 12, 12760–12770. [Google Scholar] [CrossRef]
- Yaman, O. An Automated Faults Classification Method Based on Binary Pattern and Neighborhood Component Analysis Using Induction Motor. Measurement 2021, 168, 108323. [Google Scholar] [CrossRef]
- Bakır, Ç. Different Induction Motor Faults by New Proposed Random Forest Method. Balk. J. Electr. Comput. Eng. 2023, 11, 380–386. [Google Scholar] [CrossRef]
- Abdulkareem, A.; Anyim, T.; Popoola, O.; Abubakar, J.; Ayoade, A. Prediction of Induction Motor Faults Using Machine Learning. Heliyon 2025, 11, e41493. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.; Hati, A.S.; Kumar, P. A Transfer Learning-Based Deep Convolutional Neural Network Approach for Induction Machine Multiple Faults Detection. Int. J. Adapt. Control. Signal Process. 2023, 37, 2380–2393. [Google Scholar] [CrossRef]
- Misbah, I.; Lee, C.K.M.; Keung, K.L. Fault Diagnosis in Rotating Machines Based on Transfer Learning: Literature Review. Knowl.-Based Syst. 2024, 283, 111158. [Google Scholar] [CrossRef]
- Ibrahim, A.; Anayi, F.; Packianather, M. New Transfer Learning Approach Based on a CNN for Fault Diagnosis. Eng. Proc. 2022, 24, 16. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, P.; Hati, A.S.; Kim, H.S. Deep Transfer Learning Framework for Bearing Fault Detection in Motors. Mathematics 2022, 10, 4683. [Google Scholar] [CrossRef]
- Braig, M.; Zeiler, P. Using Data From Similar Systems for Data-Driven Condition Diagnosis and Prognosis of Engineering Systems: A Review and an Outline of Future Research Challenges. IEEE Access 2023, 11, 1506–1554. [Google Scholar] [CrossRef]
- Kumar, P.; Hati, A.S. Review on Machine Learning Algorithm Based Fault Detection in Induction Motors. Arch. Comput. Methods Eng. 2021, 28, 1929–1940. [Google Scholar] [CrossRef]
- Zhao, Z.; Wu, J.; Li, T.; Sun, C.; Yan, R.; Chen, X. Challenges and Opportunities of AI-Enabled Monitoring, Diagnosis & Prognosis: A Review. Chin. J. Mech. Eng. 2021, 34, 56. [Google Scholar] [CrossRef]
- Atif, M.; Azmat, S.; Khan, F.; Albogamy, F.R.; Khan, A. AI-Driven Thermography-Based Fault Diagnosis in Single-Phase Induction Motor. Results Eng. 2024, 24, 103493. [Google Scholar] [CrossRef]
- Junior, R.F.R.; dos Santos Areias, I.A.; Campos, M.M.; Teixeira, C.E.; da Silva, L.E.B.; Gomes, G.F. Fault Detection and Diagnosis in Electric Motors Using 1d Convolutional Neural Networks with Multi-Channel Vibration Signals. Measurement 2022, 190, 110759. [Google Scholar] [CrossRef]
- Souza, R.M.; Nascimento, E.G.S.; Miranda, U.A.; Silva, W.J.D.; Lepikson, H.A. Deep Learning for Diagnosis and Classification of Faults in Industrial Rotating Machinery. Comput. Ind. Eng. 2021, 153, 107060. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z.; Wang, S.; Li, W.; Sarkodie-Gyan, T.; Feng, S. A Hybrid Deep-Learning Model for Fault Diagnosis of Rolling Bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A Deep Learning Method for Bearing Fault Diagnosis Based on Cyclic Spectral Coherence and Convolutional Neural Networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar] [CrossRef]
- Tran, M.-Q.; Liu, M.-K.; Tran, Q.-V.; Nguyen, T.-K. Effective Fault Diagnosis Based on Wavelet and Convolutional Attention Neural Network for Induction Motors. IEEE Trans. Instrum. Meas. 2022, 71, 3501613. [Google Scholar] [CrossRef]
- Choudhary, A.; Mishra, R.K.; Fatima, S.; Panigrahi, B.K. Multi-Input CNN Based Vibro-Acoustic Fusion for Accurate Fault Diagnosis of Induction Motor. Eng. Appl. Artif. Intell. 2023, 120, 105872. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional Neural Network-Based Stator Current Data-Driven Incipient Stator Fault Diagnosis of Inverter-Fed Induction Motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef]
- Husari, F.; Seshadrinath, J. Early Stator Fault Detection and Condition Identification in Induction Motor Using Novel Deep Network. IEEE Trans. Artif. Intell. 2022, 3, 809–818. [Google Scholar] [CrossRef]
- Chen, Z.; Huang, H.-Z.; Deng, Z.; Wu, J. Shrinkage Mamba Relation Network with Out-of-Distribution Data Augmentation for Rotating Machinery Fault Detection and Localization under Zero-Faulty Data. Mech. Syst. Signal Process. 2025, 224, 112145. [Google Scholar] [CrossRef]
- Tran, M.; Amer, M.; Dababat, A.; Abdelaziz, A.Y.; Dai, H.-J.; Liu, M.-K.; Elsisi, M. Robust Fault Recognition and Correction Scheme for Induction Motors Using an Effective IoT with Deep Learning Approach. Measurement 2023, 207, 112398. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing Fault Diagnosis Base on Multi-Scale CNN and LSTM Model. J. Intell. Manuf. 2021, 32, 971–987. [Google Scholar] [CrossRef]
- Abdelmaksoud, M.; Torki, M.; El-Habrouk, M.; Elgeneidy, M. Convolutional-Neural-Network-Based Multi-Signals Fault Diagnosis of Induction Motor Using Single and Multi-Channels Datasets. Alex. Eng. J. 2023, 73, 231–248. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly Accurate Machine Fault Diagnosis Using Deep Transfer Learning. IEEE Trans. Ind. Inform. 2019, 15, 2446–2455. [Google Scholar] [CrossRef]
- Kumar, P.; Raouf, I.; Kim, H.S. Transfer Learning for Servomotor Bearing Fault Detection in the Industrial Robot. Adv. Eng. Softw. 2024, 194, 103672. [Google Scholar] [CrossRef]
- Gangsar, P.; Bajpei, A.R.; Porwal, R. A Review on Deep Learning Based Condition Monitoring and Fault Diagnosis of Rotating Machinery. Noise Vib. Worldw. 2022, 53, 550–578. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, T.; Cui, G.; Pan, Y. Intelligent Machine Fault Diagnosis Using Convolutional Neural Networks and Transfer Learning. IEEE Access 2022, 10, 50959–50973. [Google Scholar] [CrossRef]
- Misra, S.; Kumar, S.; Sayyad, S.; Bongale, A.; Jadhav, P.; Kotecha, K.; Abraham, A.; Gabralla, L.A. Fault Detection in Induction Motor Using Time Domain and Spectral Imaging-Based Transfer Learning Approach on Vibration Data. Sensors 2022, 22, 8210. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 136–144. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, Y.; Qin, C.; Liu, Z.; Li, Y.; Liu, C. Transfer Learning with Convolutional Neural Networks for Small Sample Size Problem in Machinery Fault Diagnosis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 5131–5143. [Google Scholar] [CrossRef]
- Li, J.; Huang, R.; He, G.; Wang, S.; Li, G.; Li, W. A Deep Adversarial Transfer Learning Network for Machinery Emerging Fault Detection. IEEE Sens. J. 2020, 20, 8413–8422. [Google Scholar] [CrossRef]
- Dişli, F.; Gedikpınar, M.; Sengur, A. Deep Transfer Learning-Based Broken Rotor Fault Diagnosis For Induction Motors. TJST 2023, 18, 275–290. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, T. Deep Convolutional Neural Network Using Transfer Learning for Fault Diagnosis. IEEE Access 2021, 9, 43889–43897. [Google Scholar] [CrossRef]
- Xu, W.; Wan, Y.; Zuo, T.-Y.; Sha, X.-M. Transfer Learning Based Data Feature Transfer for Fault Diagnosis. IEEE Access 2020, 8, 76120–76129. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines With Unlabeled Data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Lu, T.; Yu, F.; Han, B.; Wang, J. A Generic Intelligent Bearing Fault Diagnosis System Using Convolutional Neural Networks with Transfer Learning. IEEE Access 2020, 8, 164807–164814. [Google Scholar] [CrossRef]
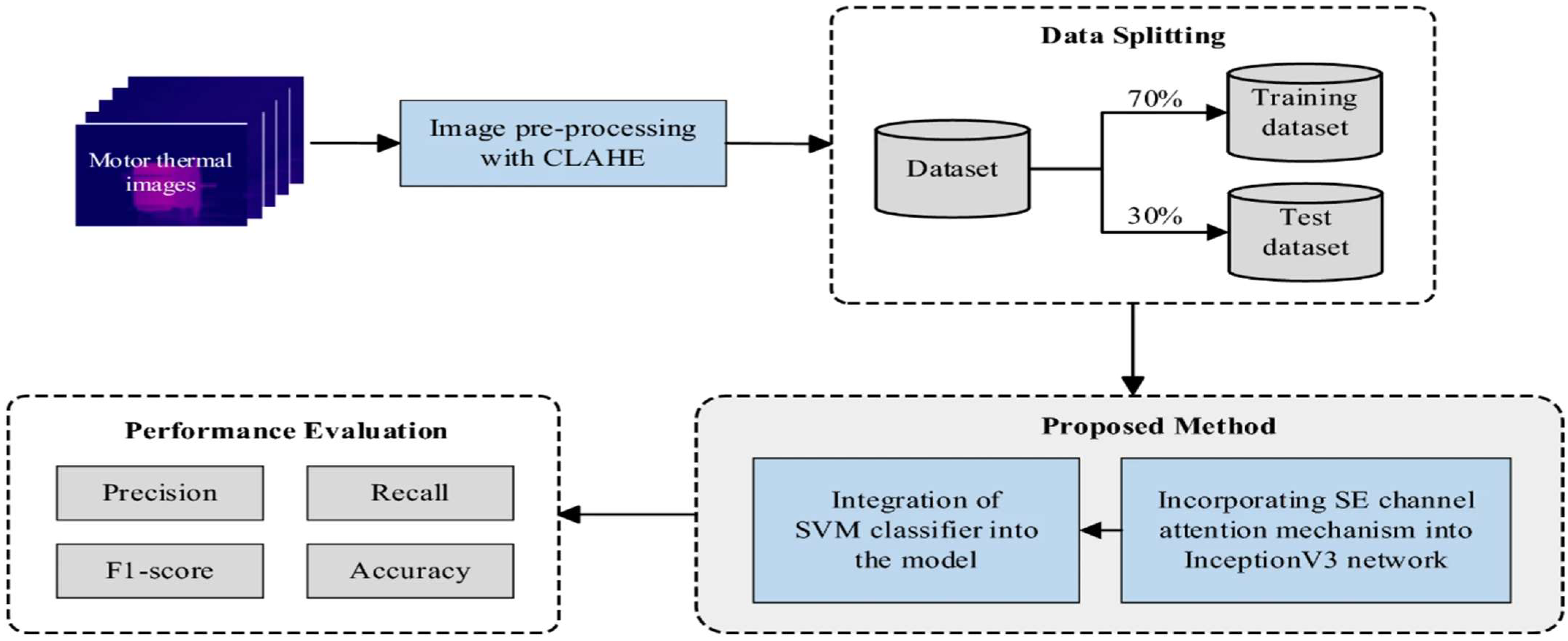
- Xu, L.; Teoh, S.S.; Ibrahim, H. A Deep Learning Approach for Electric Motor Fault Diagnosis Based on Modified InceptionV3. Sci. Rep. 2024, 14, 12344. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, Y.; Deng, J.; Jiang, Y.; Zhang, W. A Novel Transfer Learning Method for Bearing Fault Diagnosis under Different Working Conditions. Measurement 2021, 171, 108767. [Google Scholar] [CrossRef]
- Wu, Z.; Jiang, H.; Zhao, K.; Li, X. An Adaptive Deep Transfer Learning Method for Bearing Fault Diagnosis. Measurement 2020, 151, 107227. [Google Scholar] [CrossRef]
- Kumar, P.; Hati, A.S. Transfer Learning-Based Deep CNN Model for Multiple Faults Detection in SCIM. Neural Comput. Applic. 2021, 33, 15851–15862. [Google Scholar] [CrossRef]
- Jigyasu, R.; Shrivastava, V.; Singh, S.; Bhadoria, V. Transfer Learning Based Bearing and Rotor Fault Diagnosis of Induction Motor. In Proceedings of the 2022 2nd International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 28–29 April 2022; pp. 2628–2632. [Google Scholar]
- Hasan, M.J.; Islam, M.M.M.; Kim, J.-M. Acoustic Spectral Imaging and Transfer Learning for Reliable Bearing Fault Diagnosis under Variable Speed Conditions. Measurement 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Choudhary, A.; Mian, T.; Fatima, S.; Panigrahi, B.K. Passive Thermography Based Bearing Fault Diagnosis Using Transfer Learning With Varying Working Conditions. IEEE Sens. J. 2023, 23, 4628–4637. [Google Scholar] [CrossRef]
- Luo, S.; Huang, X.; Wang, Y.; Luo, R.; Zhou, Q. Transfer Learning Based on Improved Stacked Autoencoder for Bearing Fault Diagnosis. Knowl.-Based Syst. 2022, 256, 109846. [Google Scholar] [CrossRef]
- Liu, D.; Cui, L.; Wang, G.; Cheng, W. Interpretable Domain Adaptation Transformer: A Transfer Learning Method for Fault Diagnosis of Rotating Machinery. Struct. Health Monit. 2025, 24, 1187–1200. [Google Scholar] [CrossRef]
- Shao, J.; Huang, Z.; Zhu, Y.; Zhu, J.; Fang, D. Rotating Machinery Fault Diagnosis by Deep Adversarial Transfer Learning Based on Subdomain Adaptation. Adv. Mech. Eng. 2021, 13, 16878140211040226. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Li, Q. Generative Adversarial Network and Transfer-Learning-Based Fault Detection for Rotating Machinery with Imbalanced Data Condition. Meas. Sci. Technol. 2022, 33, 045103. [Google Scholar] [CrossRef]
- Huo, C.; Jiang, Q.; Shen, Y.; Qian, C.; Zhang, Q. New Transfer Learning Fault Diagnosis Method of Rolling Bearing Based on ADC-CNN and LATL under Variable Conditions. Measurement 2022, 188, 110587. [Google Scholar] [CrossRef]
- Yu, X.; Liang, Z.; Wang, Y.; Yin, H.; Liu, X.; Yu, W.; Huang, Y. A Wavelet Packet Transform-Based Deep Feature Transfer Learning Method for Bearing Fault Diagnosis under Different Working Conditions. Measurement 2022, 201, 111597. [Google Scholar] [CrossRef]
- Liang, J.; Liang, Q.; Wu, Z.; Chen, H.; Zhang, S.; Jiang, F. A Novel Unsupervised Deep Transfer Learning Method With Isolation Forest for Machine Fault Diagnosis. IEEE Trans. Ind. Inform. 2024, 20, 235–246. [Google Scholar] [CrossRef]
- Kumar, P.; Singh, S.; Song, D.Y. Investigation of Transfer Learning Method for Motor Fault Detection. Machines 2025, 13, 329. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, X.; Li, J. Deep Residual Network Combined with Transfer Learning Based Fault Diagnosis for Rolling Bearing. Appl. Sci. 2022, 12, 7810. [Google Scholar] [CrossRef]
- Jiang, L.; Zhu, S.; Sun, N. An Improved Lightweight Variant of EfficientNetV2 Coupled With Sensor Fusion and Transfer Learning Techniques for Motor Fault Diagnosis. IEEE Access 2024, 12, 84470–84487. [Google Scholar] [CrossRef]
- Yang, Y.; Jing, J.; Zhang, J.; Liu, Z.; Li, X. Discriminative Fault Diagnosis Transfer Learning Network under Joint Mechanism. Sci. Rep. 2025, 15, 8888. [Google Scholar] [CrossRef]
- Abid, M.; ul Haq, I.; Cai, Z.; Zhang, S. Faults Identification with Deep CNN Fine-Tuned ResNet50 Model for Rolling Bearings. IET Conf. Proc. 2023, 2023, 533–539. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, N.; Shen, C. A New Deep Transfer Learning Method for Bearing Fault Diagnosis Under Different Working Conditions. IEEE Sens. J. 2020, 20, 8394–8402. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, X.; Chen, B.; Chen, H.; Deng, W. Bearing Fault Diagnosis Using Transfer Learning and Optimized Deep Belief Network. Meas. Sci. Technol. 2022, 33, 065009. [Google Scholar] [CrossRef]
- Wang, X.; Shen, C.; Xia, M.; Wang, D.; Zhu, J.; Zhu, Z. Multi-Scale Deep Intra-Class Transfer Learning for Bearing Fault Diagnosis. Reliab. Eng. Syst. Saf. 2020, 202, 107050. [Google Scholar] [CrossRef]
- Skowron, M. Early Fault Diagnosis of Rotor Cage Bars and Stator Windings of Induction Motor Based on Axial Flux Signal Using Transfer Learning. In Proceedings of the the 2nd International Electronic Conference on Machines and Applications, Online, 18–20 June 2024. [Google Scholar]
- Zhu, P.; Ma, S.; Han, Q.; Chu, F. Deep Transfer Learning With Generalized Distribution Matching Measure for Rotating Machinery Fault Diagnosis. IEEE Trans. Ind. Inform. 2025, 21, 3515–3524. [Google Scholar] [CrossRef]
- Rosyadi, I.; Nazaruddin, Y.Y.; Siregar, P.I. Leveraging Deep Transfer Learning and Time-Aware Convolutional Transformers for Stator Winding Fault Diagnosis in Electric Motors: A Digital Twin Approach. Complex Syst. Model. Simul. 2025, 1–18. [Google Scholar] [CrossRef]
- Zheng, B.; Huang, J.; Ma, X.; Zhang, X.; Zhang, Q. An Unsupervised Transfer Learning Method Based on SOCNN and FBNN and Its Application on Bearing Fault Diagnosis. Mech. Syst. Signal Process. 2024, 208, 111047. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type (Ref.) | TL Approach | Data Type | Details | Model |
|---|---|---|---|---|
| Bearing fault [16] | CNN-based TL | Thermal images | Utilized pretrained VGG-19 on ImageNet for FDT using thermal images captured by FLIR camera. | VGG19-CNN |
| Bearing faults [62] | Signal to images conversion with Inception | Vibration signals | Converted vibration signals to 2D time–frequency images | ResNet-34 |
| Multi-faults [63] | Feature extraction with EfficientNetV2 | Multi-sensor signals | Converted multi-sensor signals to 2D time-frequency images | EfficientNetV2 |
| Bearing faults [64] | Unsupervised TL | Vibration signal | Employed Squeeze-and-Excitation (SE) attention and Joint Adaptation Network (JAN) for unsupervised diagnosis. | SE + JAN |
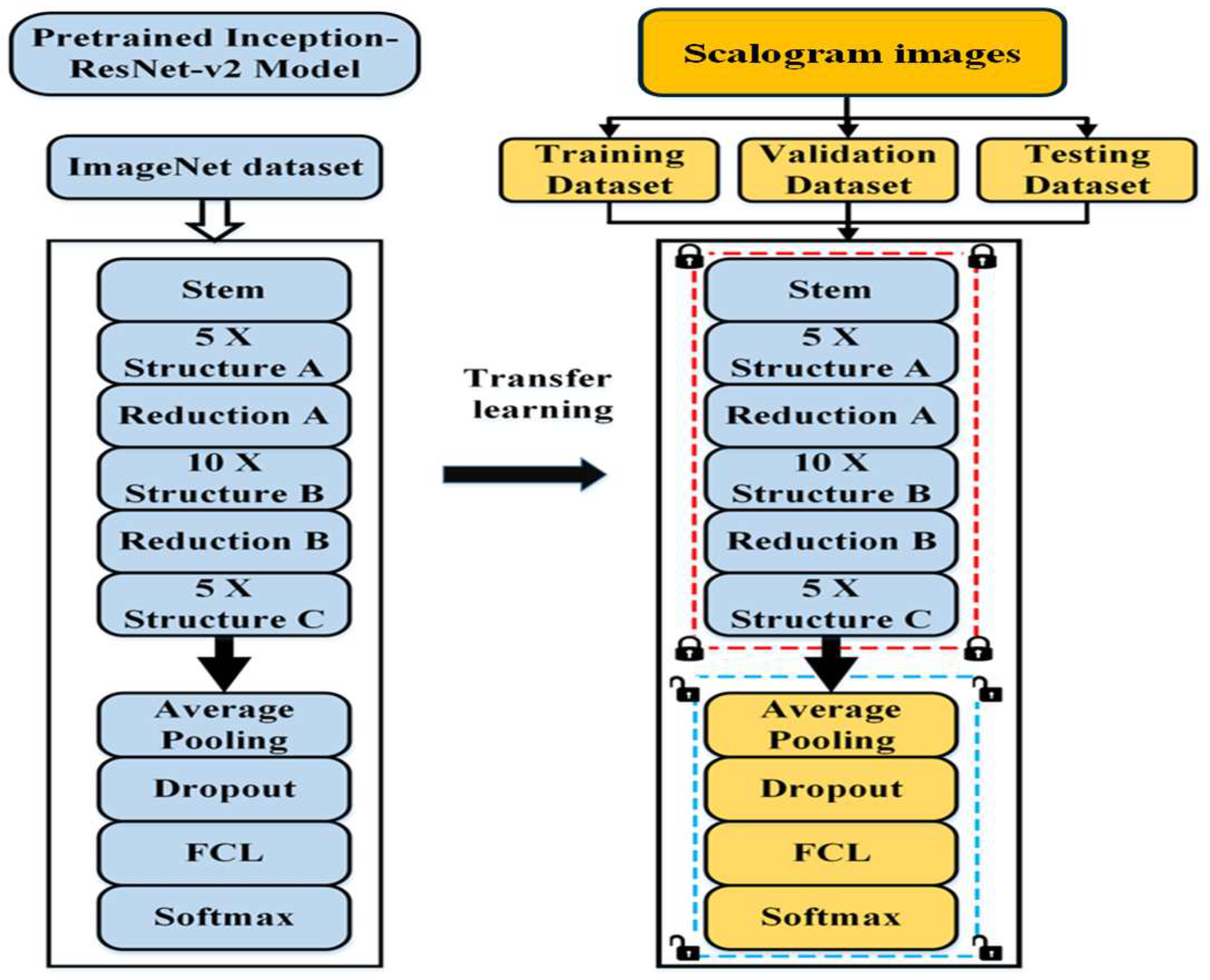
| Bearing faults [65] | TL with ResNet-50 | Vibration signal | Fine-tuned ResNet-50 for vibration-signal-based scalogram images | ResNet-50 |
| Bearing and rotor faults [14] | TL with VGG19 | Current signals | Feature extraction using VGG19 | VGG19 |
| Bearing faults [66] | TL for domain adaptation | Vibration signals | Deep TL-based CNN model for domain adaptation | TL-CNN model |
| Bearing faults [67] | Joint distribution adaptive (JDA) method | Vibration signals | JDA with deep belief network (DBN) | JDA-DBN |
| Bearing faults [68] | ResNet-50 for feature extraction | Vibration signals | ResNet-50 for low level feature extraction and multiple scale feature learner to analyze these features | ResNet-50 |
| Rotor damages [42] | ResNet18 model with time–frequency images | Vibration and current signals | CNN with TL in combination with spectrogram images | ResNet18 |
| Bearing faults [57] | Efficient-Net for feature extraction | Vibration signals | TL method based on the time-generative adversarial network | Efficient-Net model |
| Rotor cage bars and stator windings [69] | CNN for feature extraction | Axial flux | Signal processing by CNN in combination with TL | TL model |
| Bearing faults [70] | Multichannel feature extraction module | Vibration signals | Multi-order statistics matching sparse wavelet CNN method | TL model |
| Stator winding faults [71] | TL integrated with digital twin | Motor signals | Time-aware Convolutional Transformer (TaCT) model | TL model |
| Bearing faults [72] | Unsupervised TL | Vibration signals | Optimized CNN with fast batch nuclear-norm maximization | Unsupervised TL |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, P. Transfer Learning for Induction Motor Health Monitoring: A Brief Review. Energies 2025, 18, 3823. https://doi.org/10.3390/en18143823
Kumar P. Transfer Learning for Induction Motor Health Monitoring: A Brief Review. Energies. 2025; 18(14):3823. https://doi.org/10.3390/en18143823
Chicago/Turabian StyleKumar, Prashant. 2025. "Transfer Learning for Induction Motor Health Monitoring: A Brief Review" Energies 18, no. 14: 3823. https://doi.org/10.3390/en18143823
APA StyleKumar, P. (2025). Transfer Learning for Induction Motor Health Monitoring: A Brief Review. Energies, 18(14), 3823. https://doi.org/10.3390/en18143823