
An Adaptive Control Strategy for a Virtual Synchronous Generator Based on Exponential Inertia and Nonlinear Damping


Abstract
1. Introduction
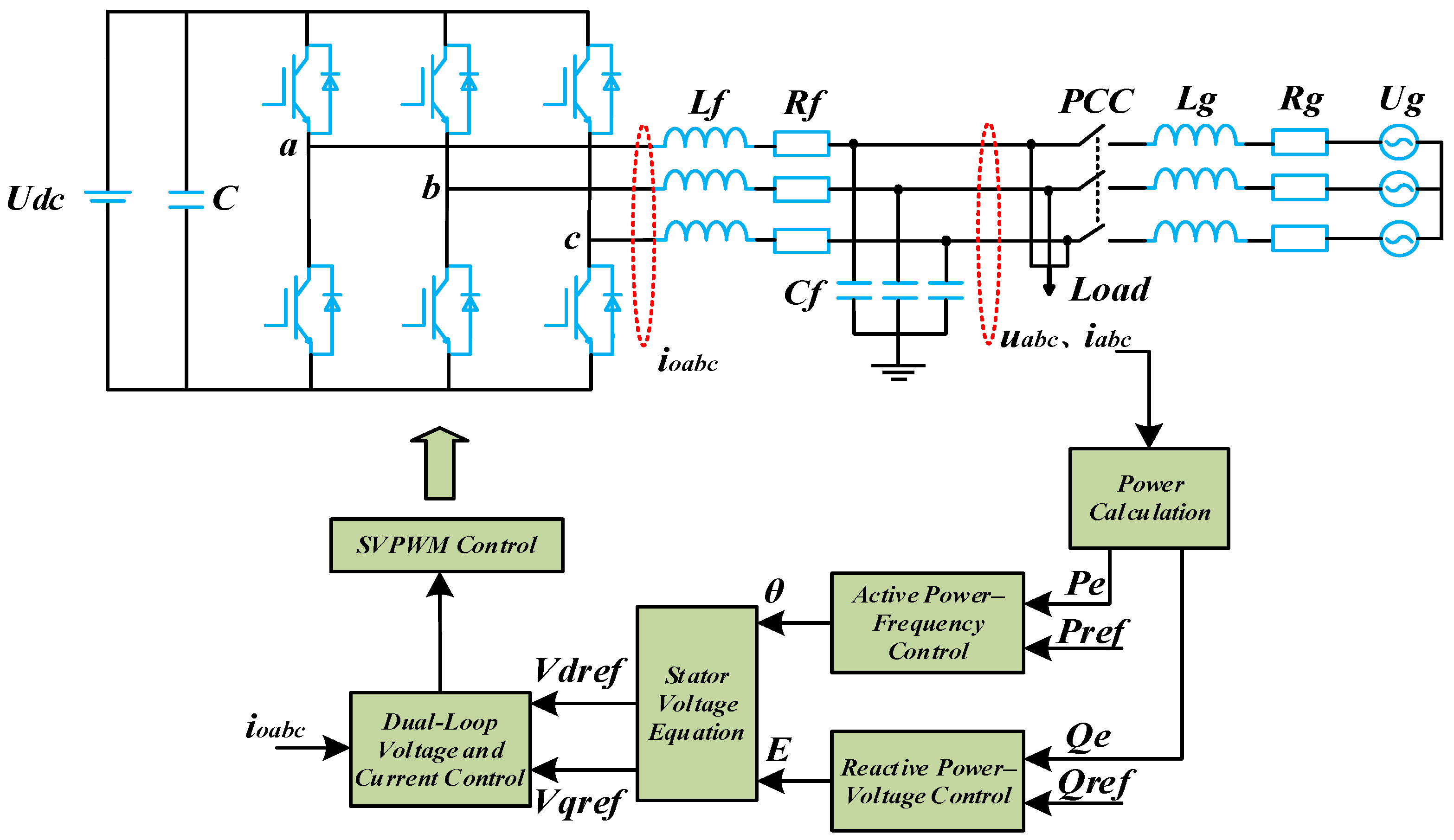
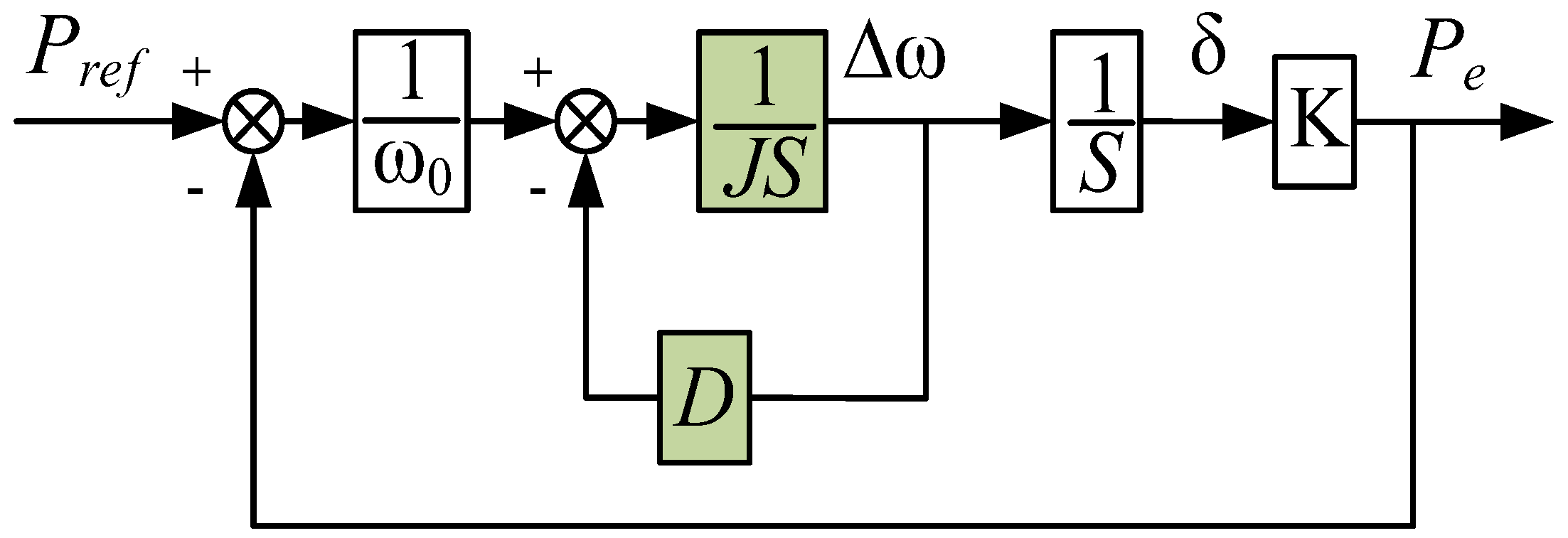
2. Fundamental Principles and Characteristic Analysis of VSG
3. Adaptive Control Strategy for VSG Parameters
3.1. Adaptive Inertia and Damping Control Algorithm
3.2. Parameter Tuning
3.2.1. Parameter Range Selection for Key Control Variables
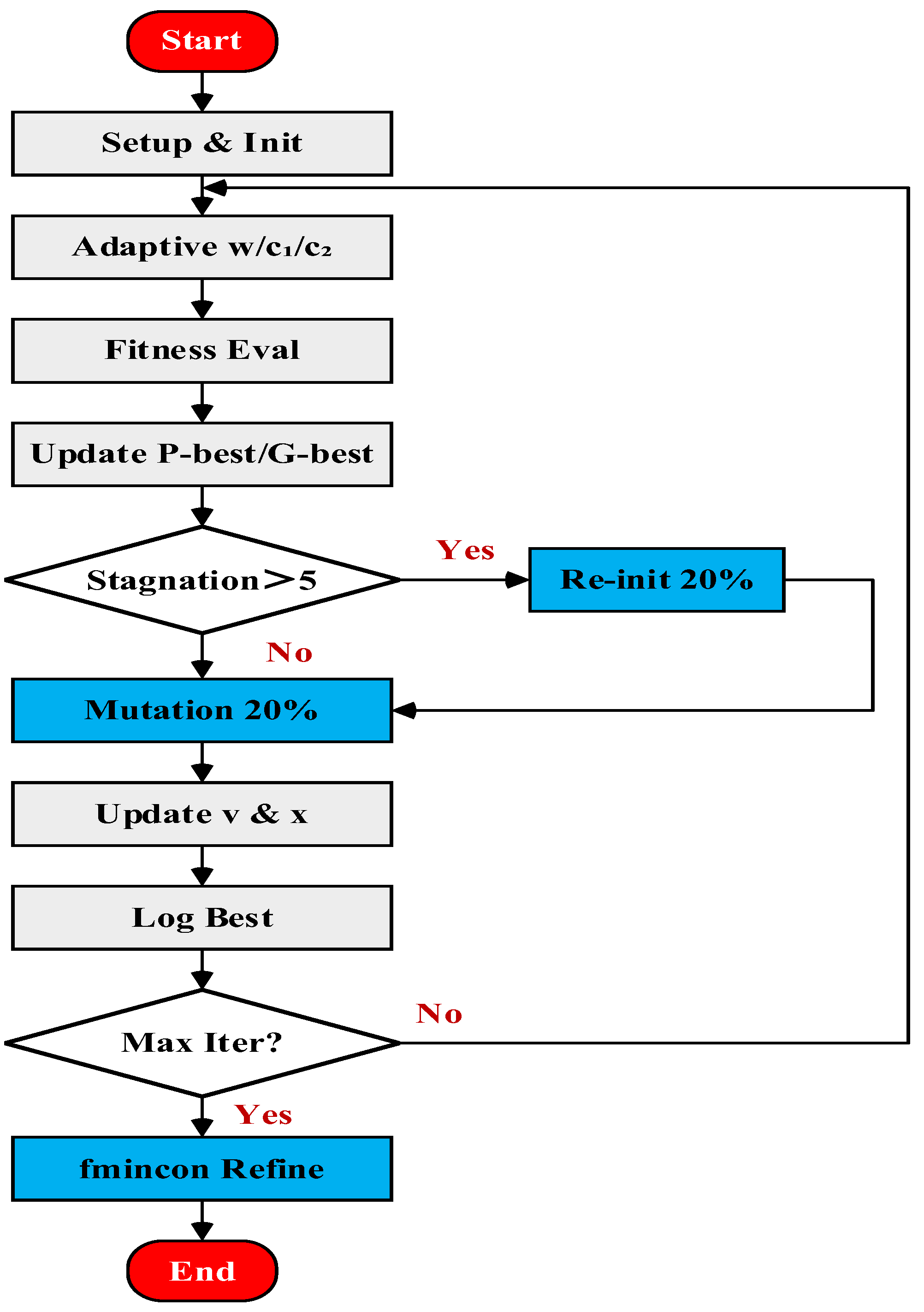
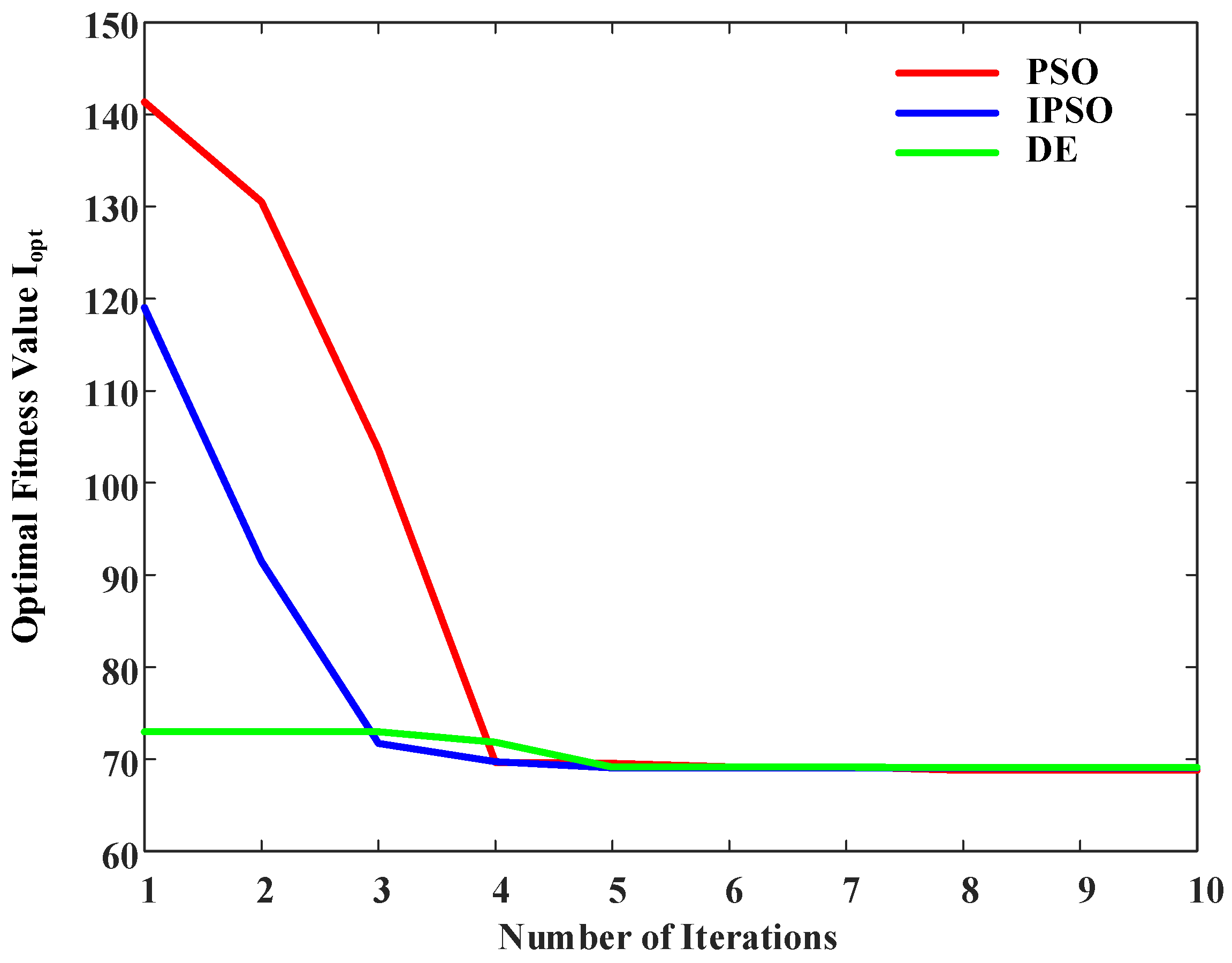
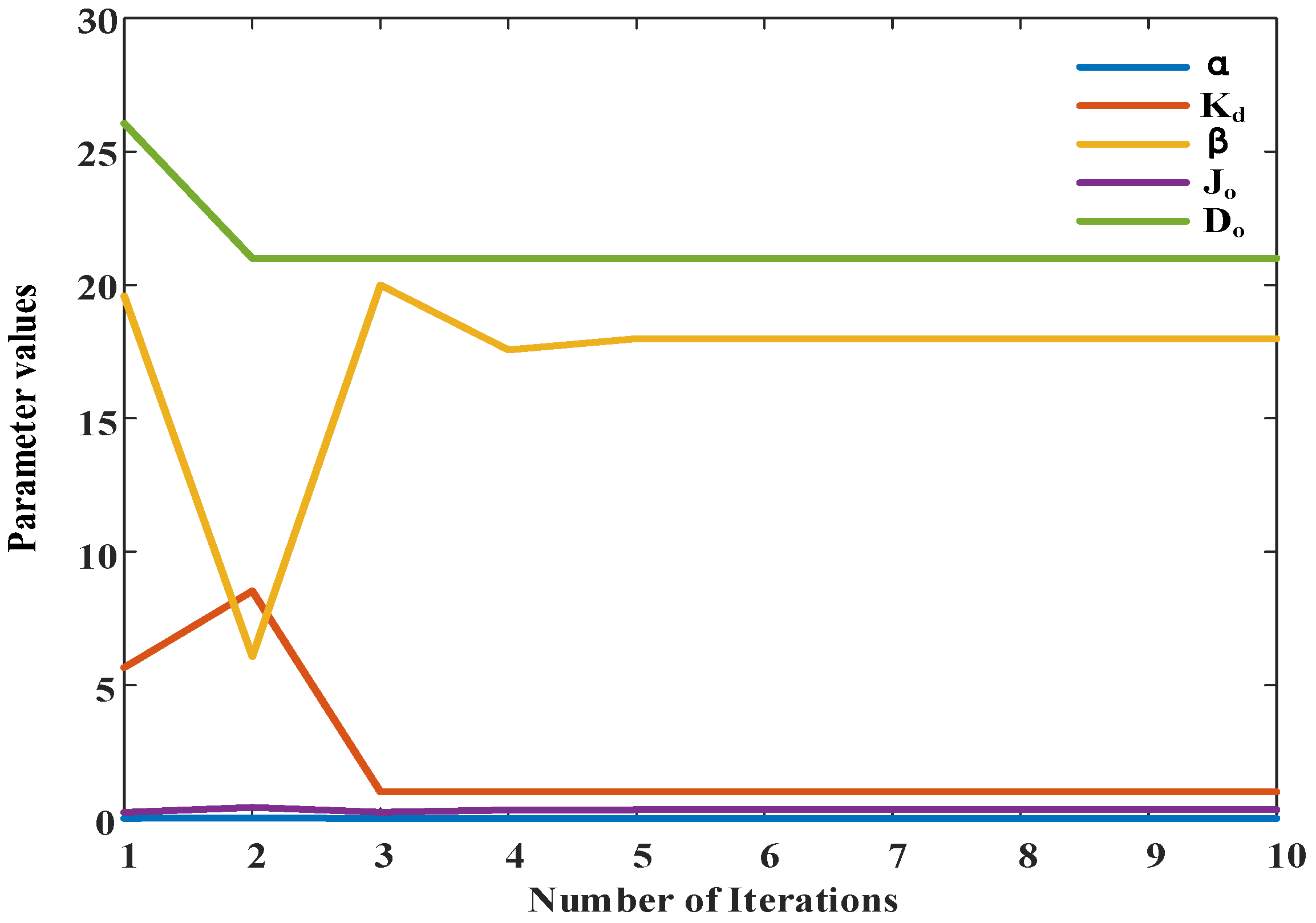
3.2.2. Parameter Optimization Using the Enhanced PSO Algorithm
4. Simulation Verification
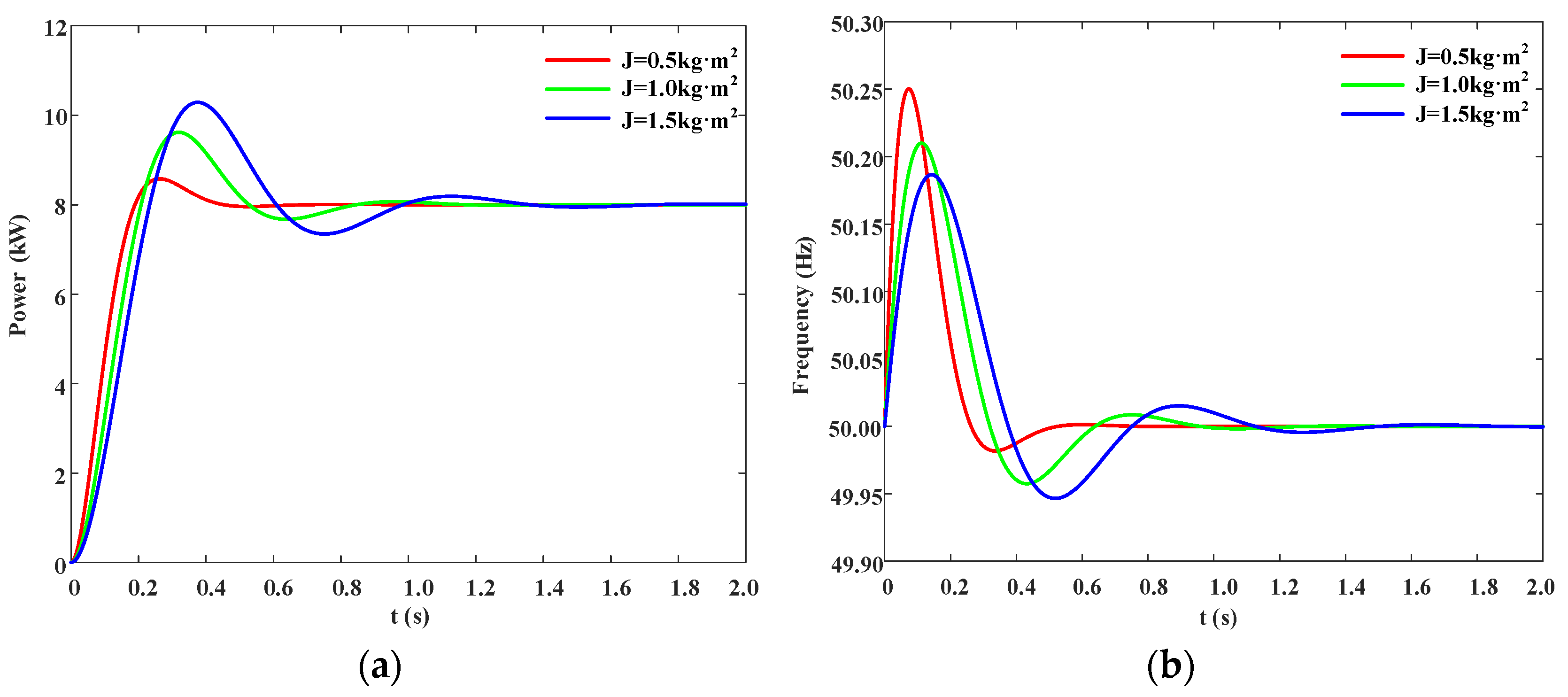
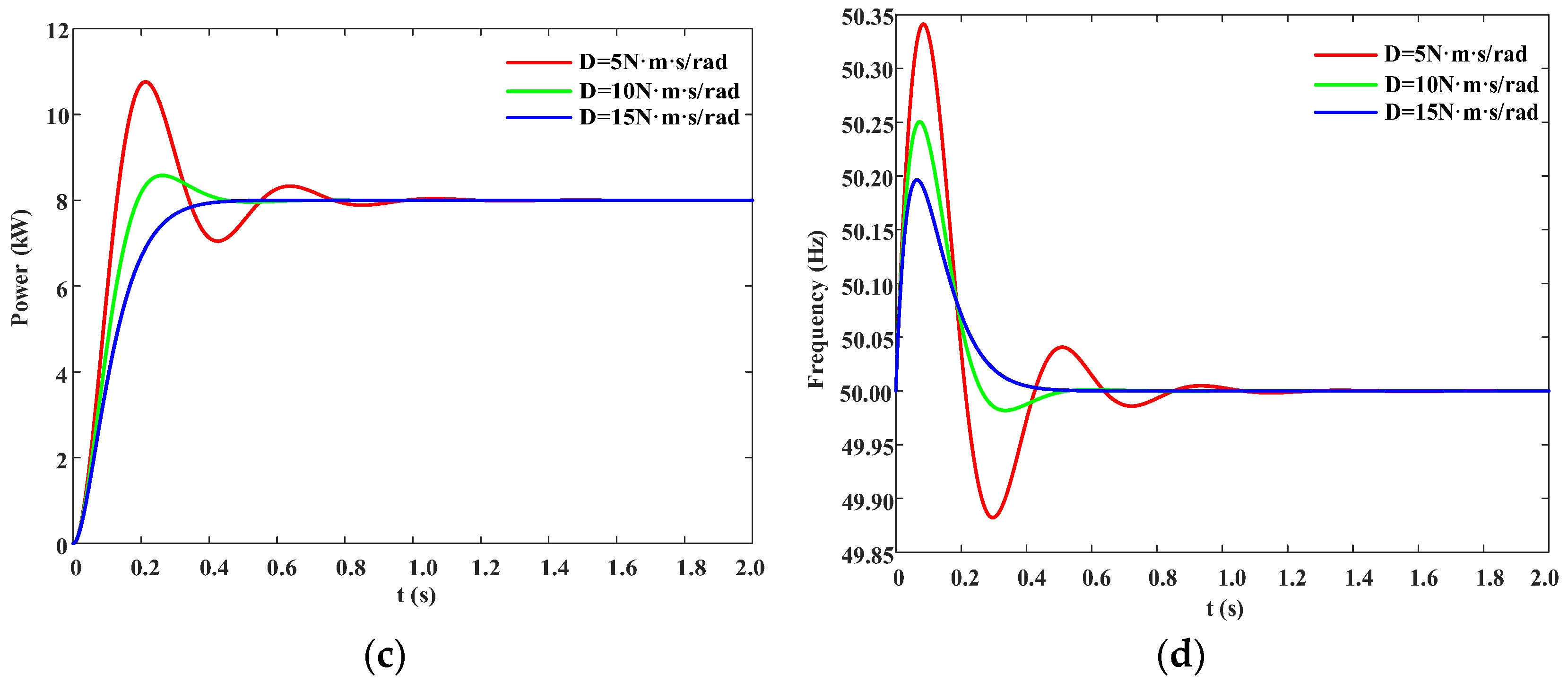
4.1. Validation of Theoretical Analysis
4.2. Validation of Adaptive Control Strategy
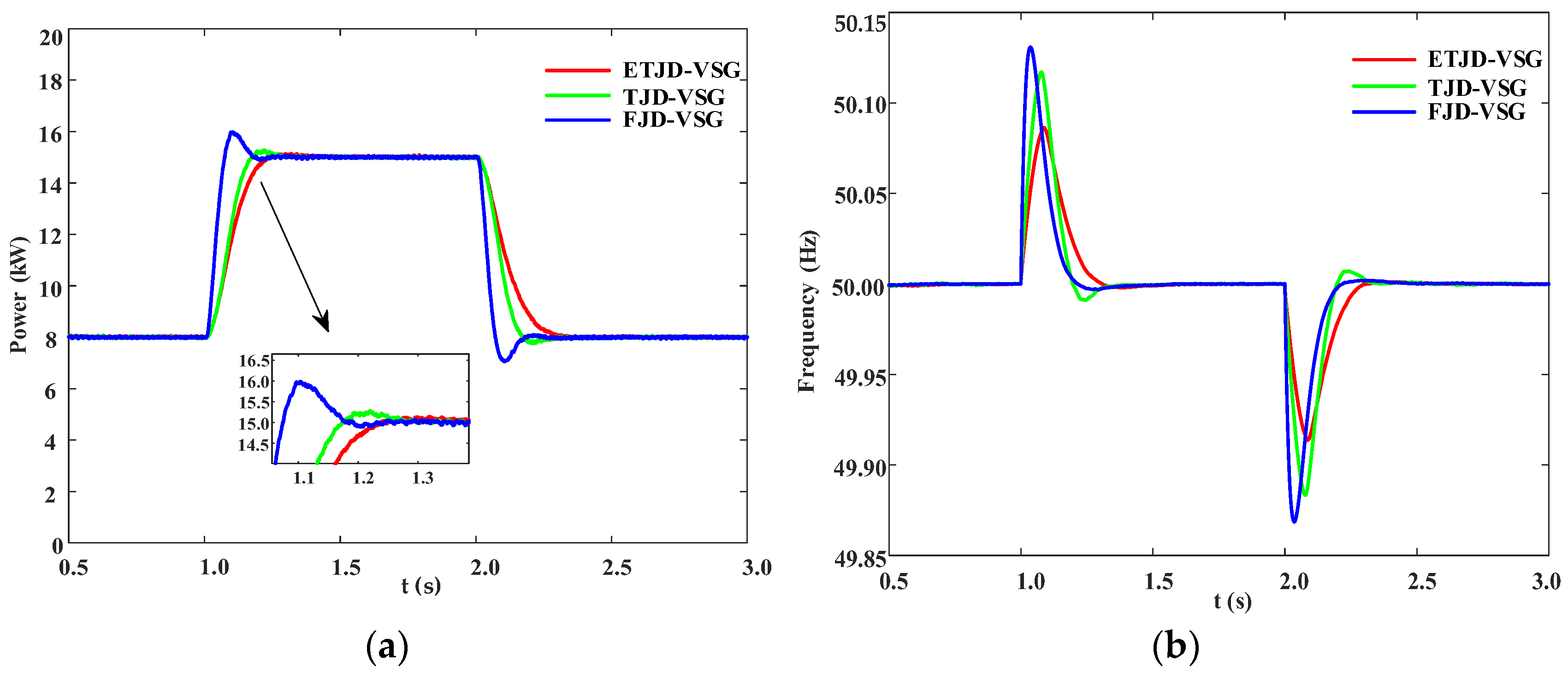
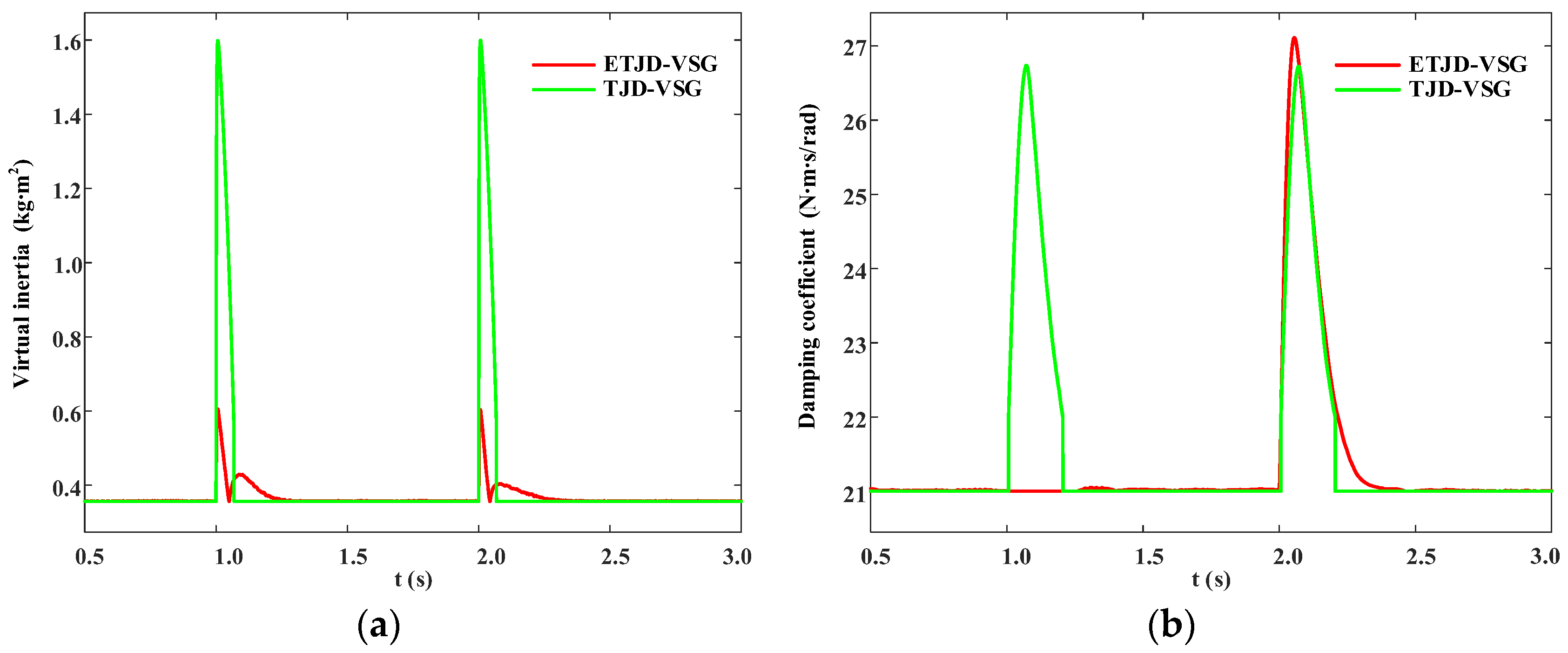
4.2.1. Sudden Change in Active Power Reference of VSG Output
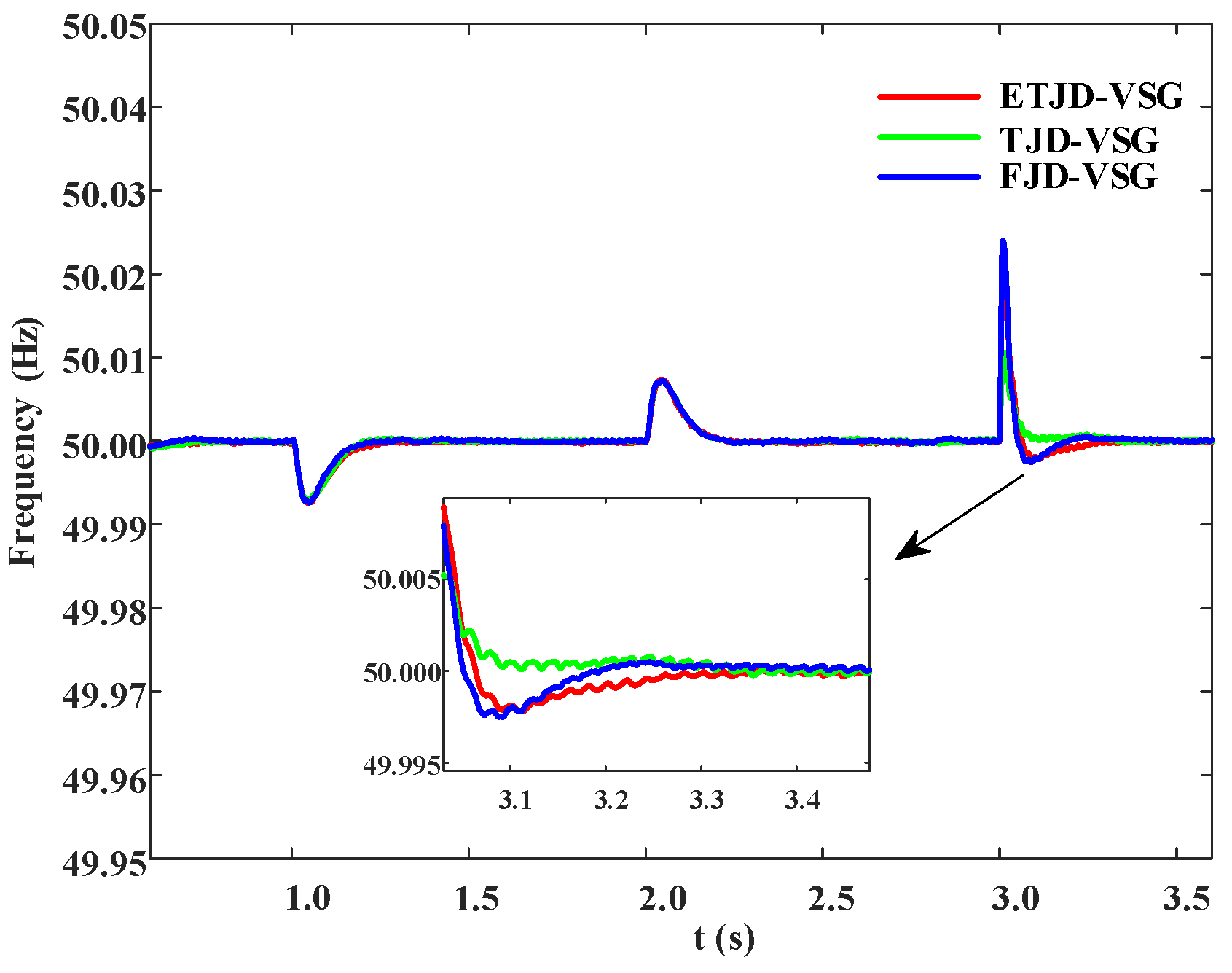
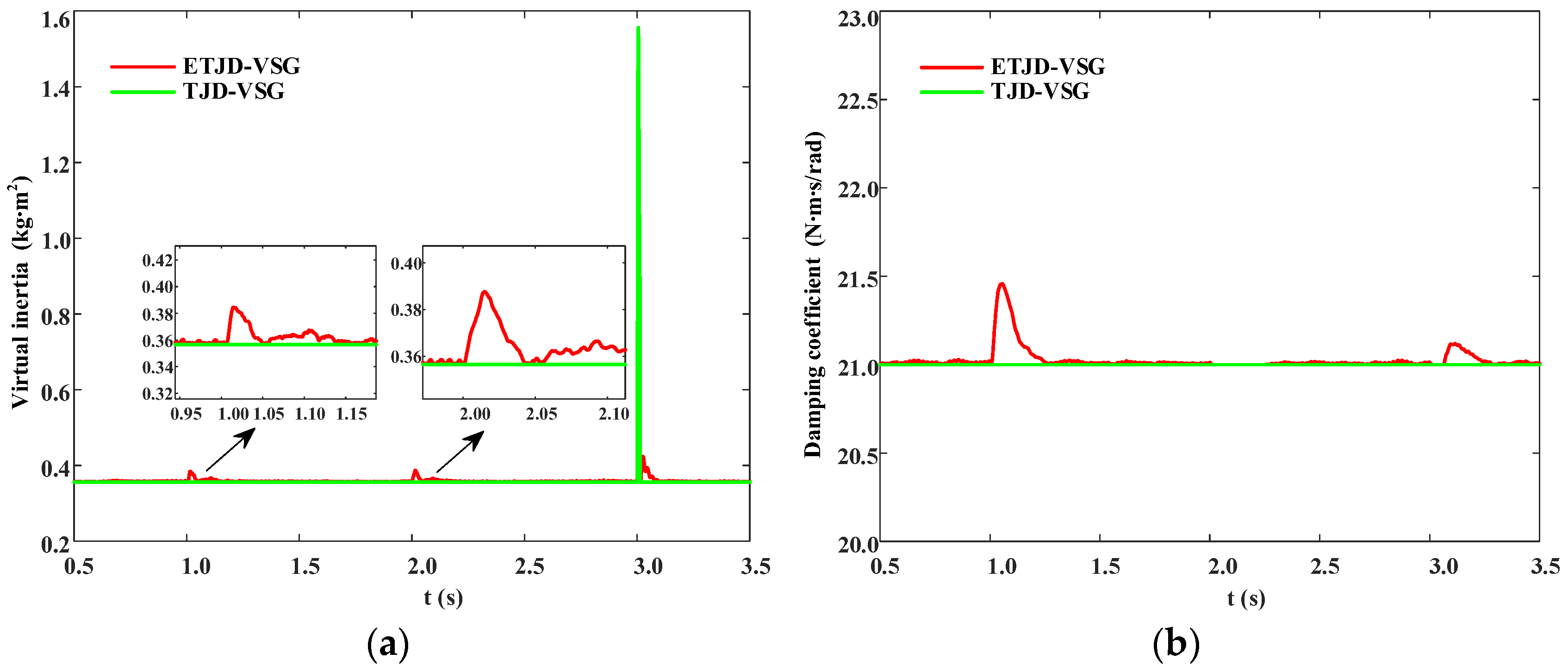
4.2.2. Grid-Connected Condition with Small Load Fluctuations
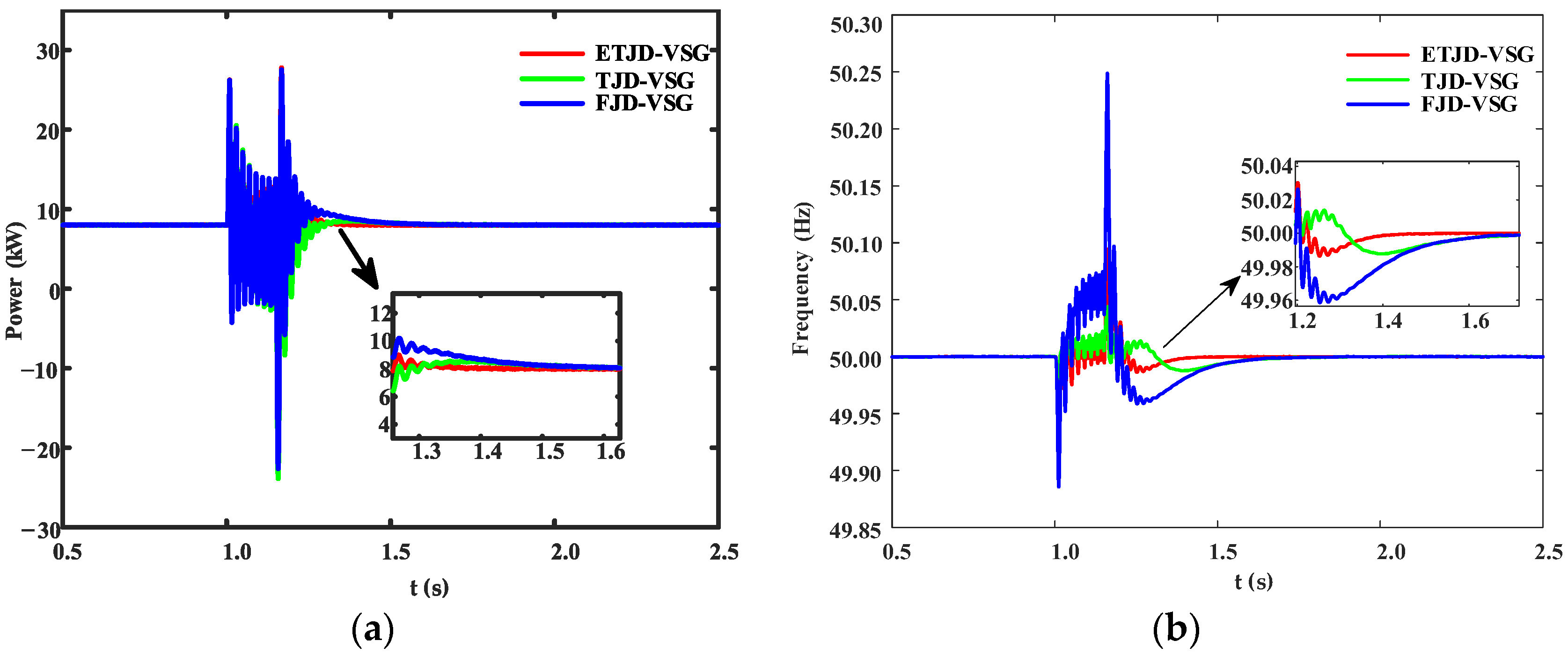
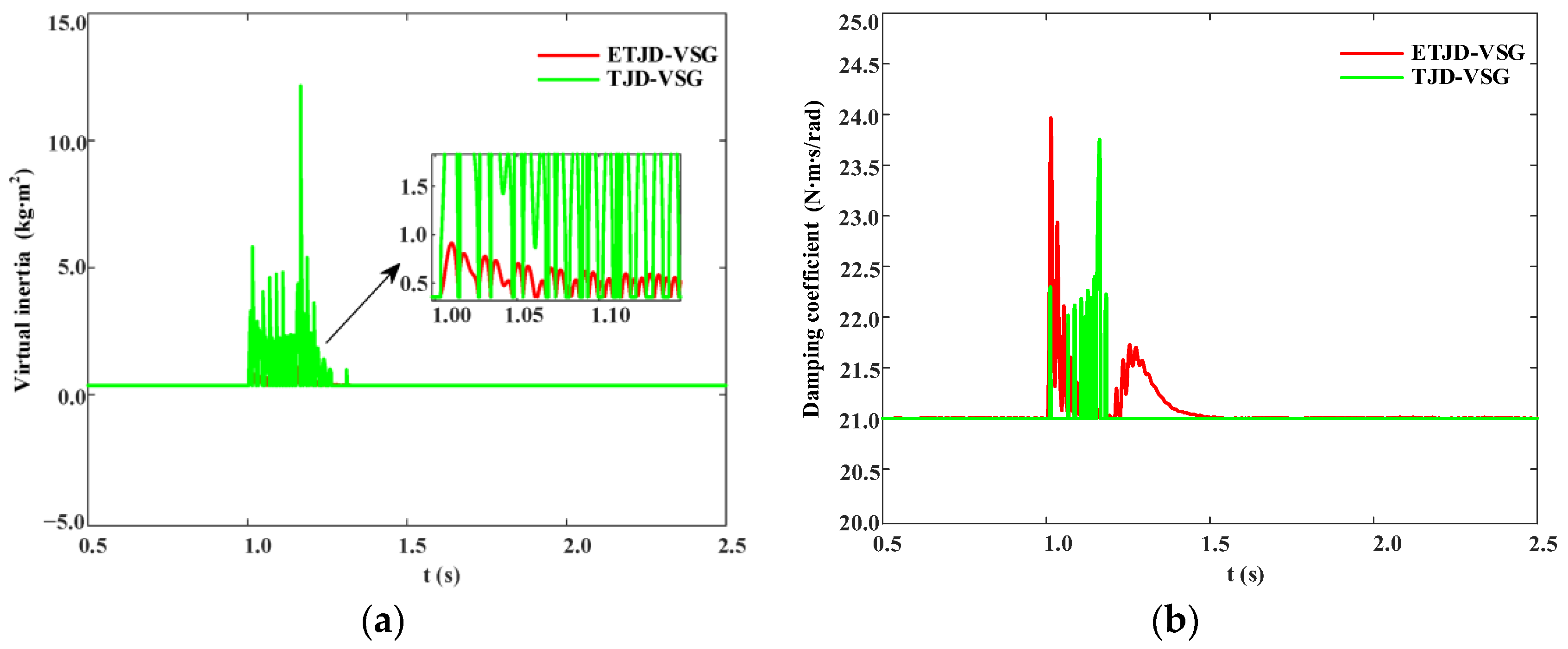
4.2.3. Grid-Side Single-Phase Fault Condition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Jin, T.; Weng, J. Virtual Synchronous Generator with Improved Adaptive Control of Rotational Inertia. Chin. Meas. Test 2025, 1, 1–6. Available online: http://kns.cnki.net/kcms/detail/51.1714.TB.20240325.1223.010.html (accessed on 7 May 2025).
- Khajehoddin, A.S.; Karimi-Ghartemani, M.; Ebrahimi, M. Grid-Supporting Inverters with Improved Dynamics. IEEE Trans. Ind. Electron. 2019, 66, 3655–3667. [Google Scholar] [CrossRef]
- Linbin, H.; Huanhai, X.; Zhen, W. Damping Low-Frequency Oscillations Through VSC-HVdc Stations Operated as Virtual Synchronous Machines. IEEE Trans. Power Electron. 2019, 34, 5803–5818. [Google Scholar]
- Lan, Z.; Liu, Z.; He, D. Active Power Oscillation Suppression Strategy for VSG Parallel Systems Based on Transient Electromagnetic Power Compensation. Power Syst. Technol. 2023, 47, 23–33. [Google Scholar]
- Chao, K.; Miao, S.; Liu, Z. Microgrid Stability Analysis Based on Virtual Synchronous Generator Control. Prot. Control Mod. Power Syst. 2019, 47, 9–16. [Google Scholar]
- Li, C.; Yang, Y.; Cao, Y.; Wang, L.; Blaabjerg, F. Frequency and Voltage Stability Analysis of Grid-Forming Virtual Synchronous Generator Attached to Weak Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2662–2671. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, Y.; Liu, S. Adaptive Control Strategy of VSG Based on Variable Universe Fuzzy Control. Distrib. Energy 2023, 8, 19–28. [Google Scholar]
- Li, J.; Wen, B.; Wang, H. Adaptive Virtual Inertia Control Strategy of VSG for Microgrid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Li, Z.; Yang, M.; Zhang, J. Cooperative Adaptive Control of VSG Inertia and Damping. J. Electr. Power Syst. Autom. 2023, 35, 36–43. [Google Scholar]
- Liu, J.; Miura, Y.; Ise, T. Fixed-Parameter Damping Methods of Virtual Synchronous Generator Control Using State Feedback. IEEE Access 2019, 7, 99177–99190. [Google Scholar] [CrossRef]
- Wang, S.; Xie, Y. Virtual Synchronous Generator Control Strategy Based on Improved Damping and Angular Frequency Deviation Feedforward. Energies 2023, 16, 5635. [Google Scholar] [CrossRef]
- Gurski, E.; Kuiava, R.; Perez, F.; Benedito, R.; Damm, G. A Novel VSG with Adaptive Virtual Inertia and Adaptive Damping Coefficient to Improve Transient Frequency Response of Microgrids. Energies 2024, 17, 4370. [Google Scholar] [CrossRef]
- Liu, P.; Zheng, K.; Zhu, J. Secondary Frequency Control of Islanded Microgrids Considering Load Dynamic Variations. J. Electron. Meas. Instrum. 2024, 38, 213–224. [Google Scholar]
- Zhang, M.; Zhao, T.; Zhu, A. Control Strategy of Virtual Synchronous Generator Based on Current Model Prediction. Mach. Electron. 2023, 41, 63–69. [Google Scholar]
- Kang, X.; Huang, W.; Zhou, G. Deep Reinforcement Learning-Based Parameter Self-Tuning Control Strategy for VSG. Energy Rep. 2022, 8, 219–226. [Google Scholar]
- Guo, J.; Fan, Y. Adaptive Control Strategy of VSG Parameters Based on Improved Particle Swarm Optimization. J. Electr. Mach. Control 2022, 26, 90–98. [Google Scholar]
- Grover, H.; Sharma, S.; Verma, A.; Hossain, M.J.; Kamwa, I. Adaptive Parameter Tuning Strategy of VSG-Based Islanded Microgrid under Uncertainties. In Proceedings of the IEEE International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Hyderabad, India, 31 July–3 August 2024; pp. 1–6. [Google Scholar]
- Zhao, N.; Qiao, P.; Zhou, P. Adaptive Control Strategy of VSG Parameters Based on Improved Grey Wolf Algorithm. Power Sci. Eng. 2024, 40, 33–43. [Google Scholar]
- Yang, Y.; Liu, C.; Lai, S.K. Frequency-Dependent Equivalent Impedance Analysis for Optimizing Vehicle Inertial Suspensions. Nonlinear Dyn. 2025, 113, 9373–9398. [Google Scholar] [CrossRef]
- Wu, X.; Li, W.D.; Li, Z.W. Active Frequency-Response Optimization Control Strategy Considering Electrochemical Energy Storage under Large Disturbances. Autom. Electr. Power Syst. 2023, 47, 118–127. (In Chinese) [Google Scholar]
- Zhou, T.; Xiang, Y.J.; Du, K.K. Review of Coordinated Control Technology of Wind Turbine and Energy Storage Participating in Grid Frequency Regulation. Zhejiang Electr. Power 2024, 43, 45–55. (In Chinese) [Google Scholar]
- Shi, R.; Lan, C.; Dong, Z. An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism. Energies 2023, 16, 23. [Google Scholar] [CrossRef]
- Liu, W.; Shi, R.; Zhou, Q. Adaptive Optimization Strategy for VSG Parameters in Energy Storage System Based on BP Neural Network. Electron. Meas. Technol. 2024, 47, 42–49. [Google Scholar]
- EN 50549-1:2019; Requirements for Generating Plants to Be Connected in Parallel with Distribution Networks—Part 1: Connection to a LV Distribution network—Generating Plants up to and Including Type B. CENELEC—European Committee for Electrotechnical Standardization: Brussels, Belgium, 2025. Available online: https://www.en-standard.eu/ (accessed on 15 July 2025).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Udc/V | 800.00 | α | 0.001 |
| Lf/mH | 5.00 | β | 17.99 |
| Rf/Ω | 0.10 | Kd | 1.00 |
| Cf/μF | 30.00 | Kj_min | 0.20 |
| Lg/mH | 0.20 | Kj_max | 1.00 |
| Rg/Ω | 0.10 | J0/(kg∙m2) | 0.33 |
| ω0/(rad/s) | 314.00 | D0/(N∙m∙s/rad) | 21.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pian, H.; Meng, K.; Li, H.; Liu, Y.; Li, Z.; Jiang, L. An Adaptive Control Strategy for a Virtual Synchronous Generator Based on Exponential Inertia and Nonlinear Damping. Energies 2025, 18, 3822. https://doi.org/10.3390/en18143822
Pian H, Meng K, Li H, Liu Y, Li Z, Jiang L. An Adaptive Control Strategy for a Virtual Synchronous Generator Based on Exponential Inertia and Nonlinear Damping. Energies. 2025; 18(14):3822. https://doi.org/10.3390/en18143822
Chicago/Turabian StylePian, Huiguang, Keqilao Meng, Hua Li, Yongjiang Liu, Zhi Li, and Ligang Jiang. 2025. "An Adaptive Control Strategy for a Virtual Synchronous Generator Based on Exponential Inertia and Nonlinear Damping" Energies 18, no. 14: 3822. https://doi.org/10.3390/en18143822
APA StylePian, H., Meng, K., Li, H., Liu, Y., Li, Z., & Jiang, L. (2025). An Adaptive Control Strategy for a Virtual Synchronous Generator Based on Exponential Inertia and Nonlinear Damping. Energies, 18(14), 3822. https://doi.org/10.3390/en18143822