
Comparative Analysis of Energy Efficiency and Position Stability of Sub-250 g Quadcopter and Bicopter with Similar Mass Under Varying Conditions


Abstract
1. Introduction
2. Related Work and Background
3. Methods
3.1. Choosing Research Criteria
- Similar total weight, containing less than 250 g;
- Analogous electronic components—both designs use the same processor, IMU, barometer and optical flow sensor;
- Identical power source;
- Identical propulsion kit—BLDC motor + propeller.
- BLDC motors Happymodel EX1404 3500 kv with Gemfan 4024 propellers;
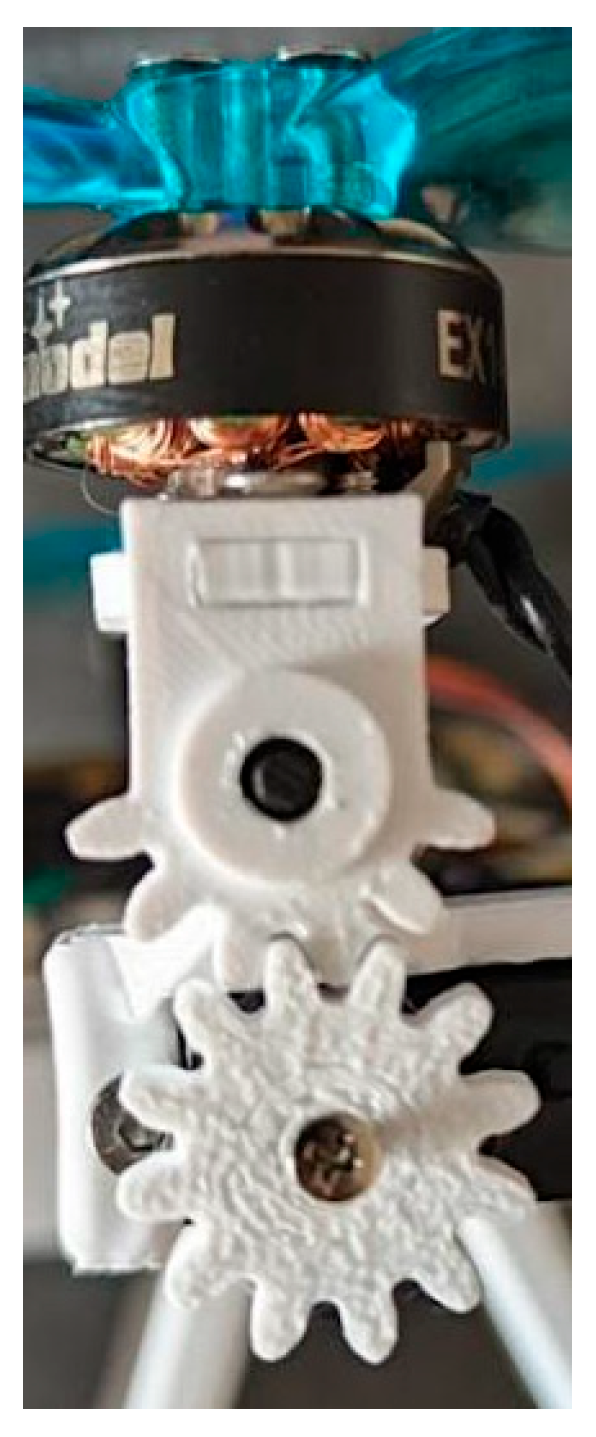
- PowerHD DSM44 Servomotors controlled directly from flight controller with Pulse-Width Modulation (PWM), steering drive unit rotation mechanism, as seen on Figure 3;
- Speedybee f405 AIO flight controller (for quadcopter) and Speedybee f405 wing mini (for bicopter);
- Mothers optical flow sensor 3901-L0X;
- 3s 1300 mAh battery;
- FrSky control with XM receiver;
- INAV 8.0.1 software.
3.2. Test Conditions
3.3. Test Scenarios
- Series 1: Maintaining position without wind
- 1.
- Drones were launched in angle mode (automatic stabilization of the drone in each axis);
- 2.
- After stabilization, the PosHold mode was activated with the surface modifier for optical flow;
- 3.
- The drones were manually positioned to stay as much as possible in the center of the test field;
- 4.
- The flight of maintaining the position over the test field for 30 s was recorded;
- 5.
- After the flight, the center of the drone’s position was marked with dots every second for 30 s on the recording;
- 6.
- After the flight, the drone’s parameters from the blackbox were read for 30 s of stable flight.
- Series 2: Maintaining position with wind
- 1.
- Drones launched in angle mode;
- 2.
- After stabilization, the PosHold mode was activated with the surface modifier for optical flow;
- 3.
- The fan was turned on, and the measurement was started;
- 4.
- After the flight, the drone’s parameters from the blackbox were read for 30 s of stable flight.
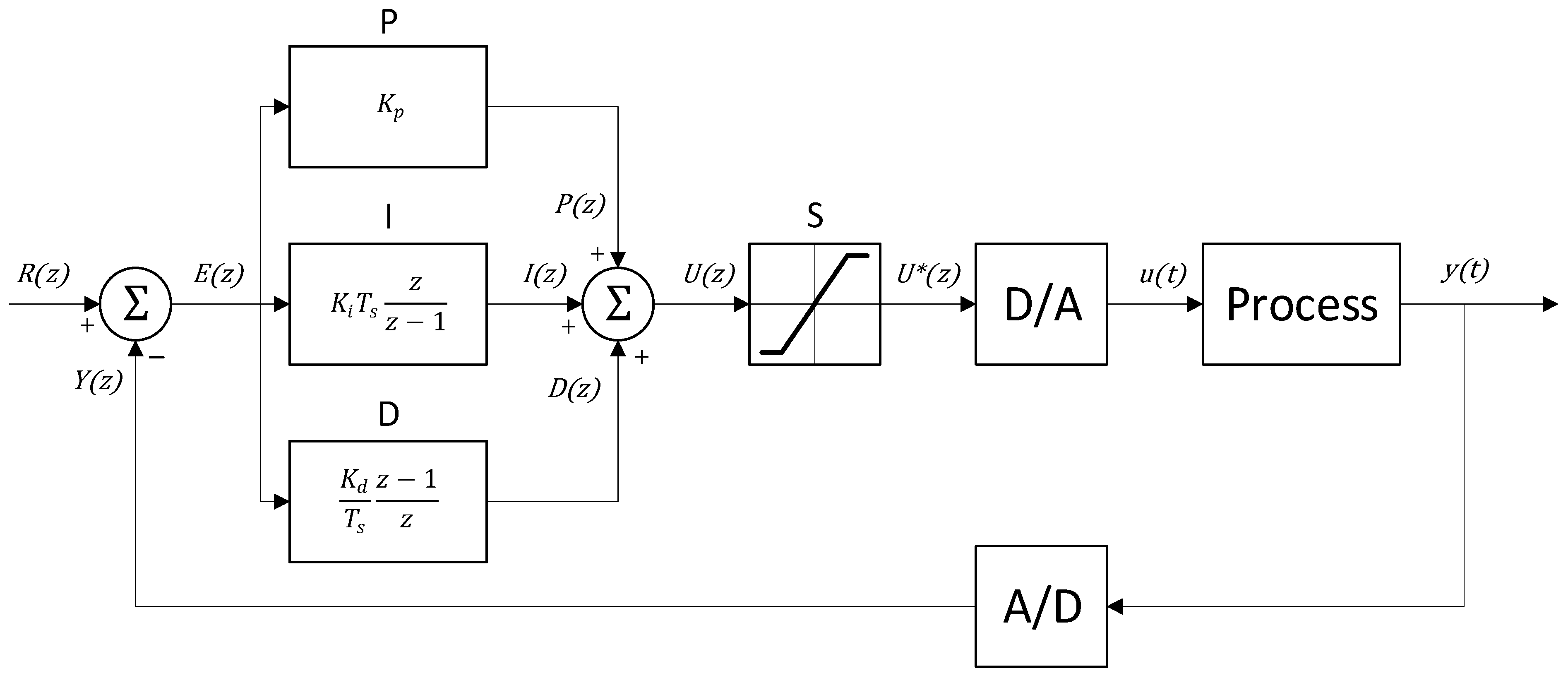
3.4. PID Controller Settings
- Calculating error:
- —error in time step z
- —set value
- —current measured value, obtained by sampling the signal
- 2.
- Proportional component (P)
- 3.
- Integrating component (I)
- —sampling period (set as default 500 μs)
- 4.
- Differential component (D)
- 5.
- PID controller output
- , , —linear positions in the North (N), East (E), and Down (D) directions
- , , —linear velocities along the body-frame x, y, and z axes
- , , —Euler angles
- , , —angular velocities around the x, y, and z axes
- Euler angles: The three angles (, , ) define the orientation of the UAV with respect to the reference frame. They correspond to rotations around the following axes:
- —roll: rotation around the longitudinal axis (x)
- —pitch: rotation around the lateral axis (y)
- —yaw: rotation around the vertical axis (z)
3.5. Power Registration and Measurement Methods
- Angular velocities from gyroscopes;
- Accelerations from accelerometers;
- PWM signal values on motors;
- Voltage U and current I drawn by the entire drone.
3.6. Stability Registration and Measurement Methods
4. Experimental Results
4.1. Engine Tests on the Dynamometer
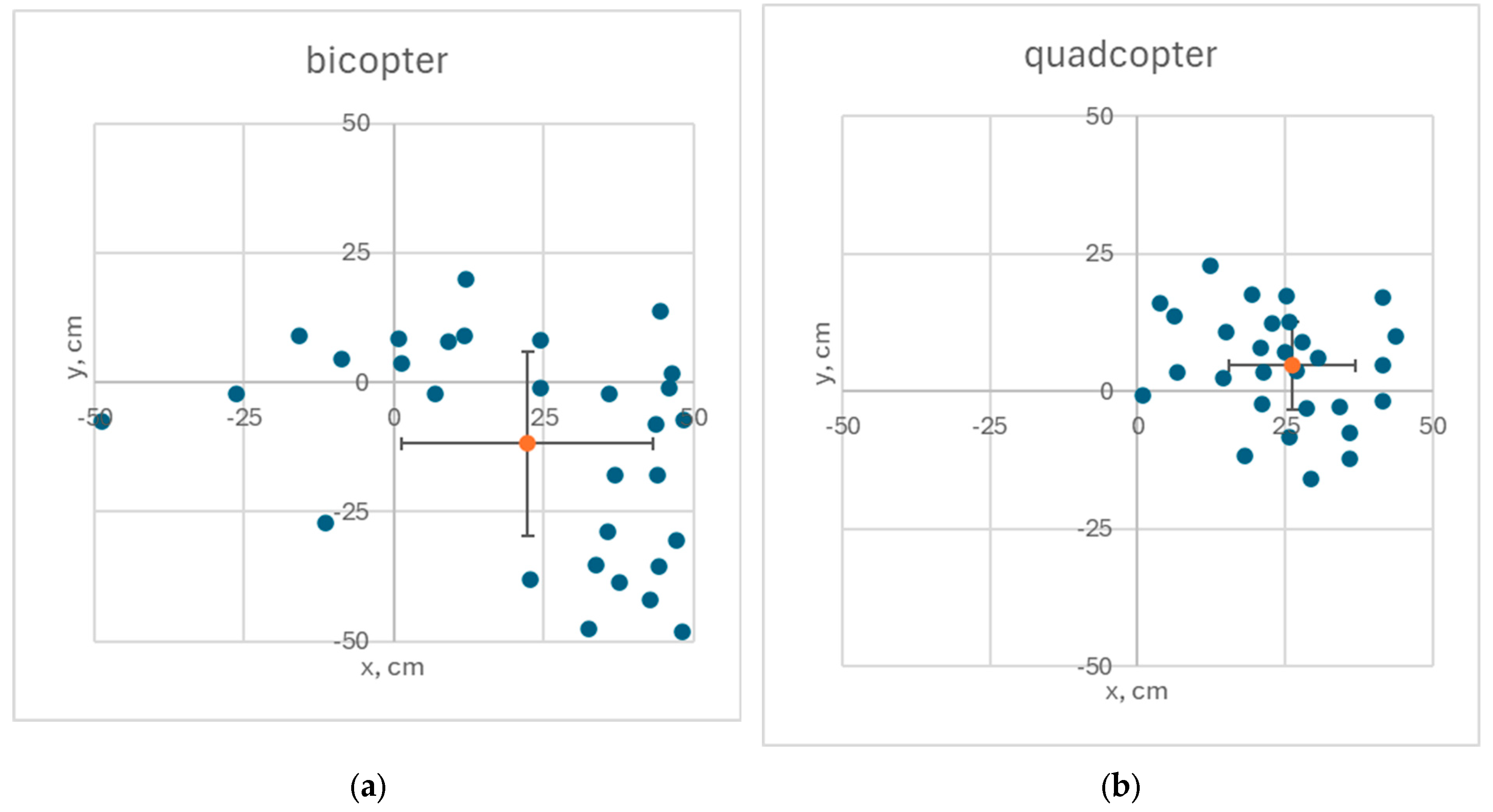
4.2. Wind-Free Positioning Tests
4.3. Wind Stabilizzation Tests
5. Discussion
6. Conclusions
- Energy consumption: In tests conducted, the quadcopter showed 6–22% lower energy consumption than the bicopter, especially in gusts of wind (Figure 10), although these do not fully reflect actual urban turbulence, which should be taken into account in future tests. The energy efficiency of the bicopter can be improved by using a propulsion system whose highest efficiency is achieved for higher thrusts (those in which flight is performed)
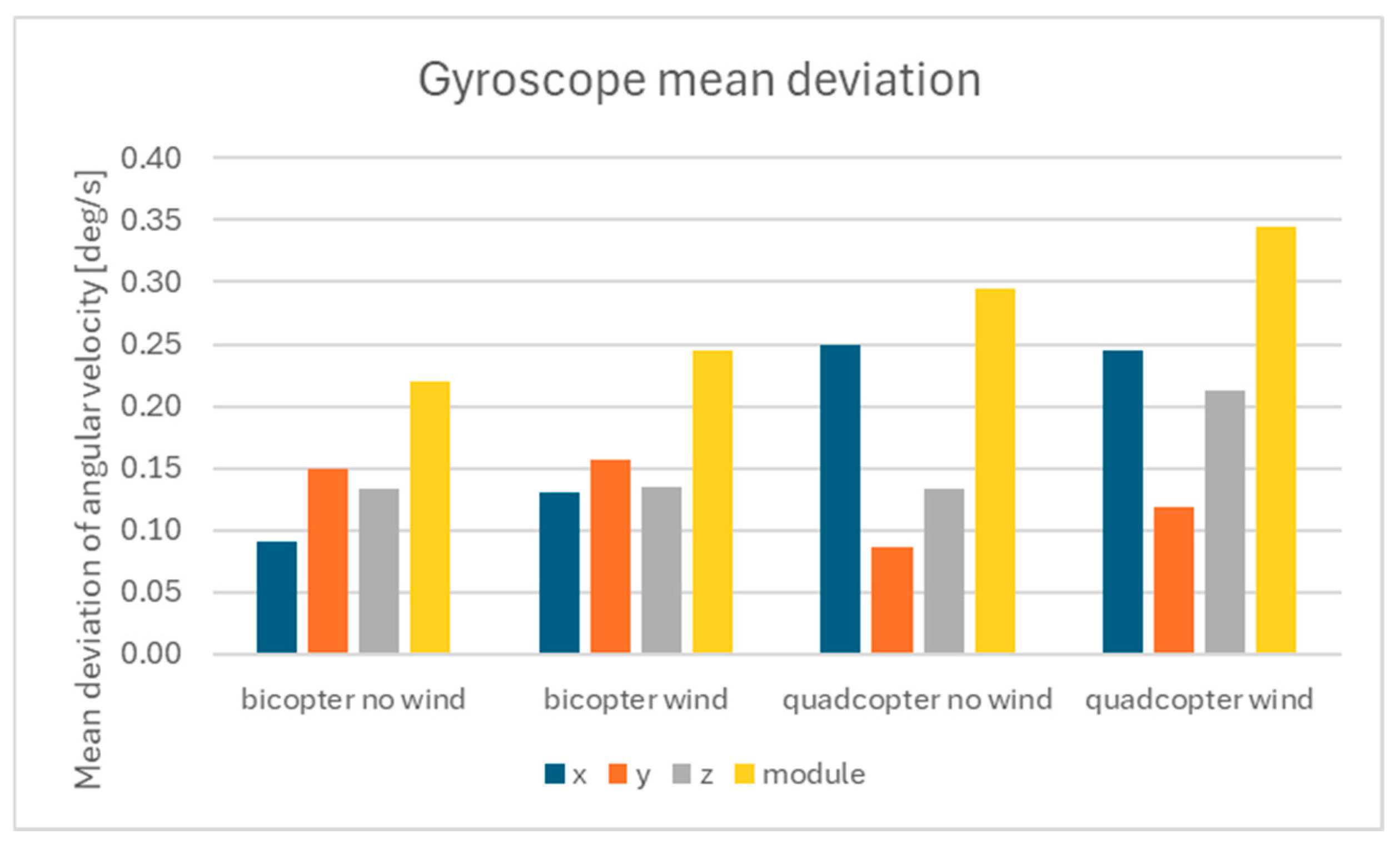
- Flight stability: The quadcopter provides easier stability due to widely available controller settings and better understood mechanics (Figure 9). Nevertheless, it is possible to configure a stable bicopter. In future work, it is recommended to use servos with the highest possible refresh rate and the lowest possible backlash.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qin, Y.; Xu, W.; Lee, A.; Zhang, F. Gemini: A Compact yet Efficient Bi-Copter UAV for Indoor Applications. IEEE Robot. Autom. Lett. 2020, 5, 3213–3220. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, Z.; Zhao, J.; Zhang, S. Modeling and Attitude Control of Bi-Copter. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 8–14 October 2016; IEEE: Piscataway Township, NJ, USA, 2016. [Google Scholar]
- Li, Y.; Qin, Y.; Xu, W.; Zhang, F. Modeling, Identification, and Control of Non-Minimum Phase Dynamics of Bi-Copter UAVs. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; IEEE: Piscataway Township, NJ, USA, 2020. [Google Scholar]
- Hu, A.; Zhao, X.; Xu, D. Modeling and Hovering Control of 5-DoF Tilt-Birotor Robot. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; IEEE: Piscataway Township, NJ, USA, 2020. [Google Scholar]
- Qin, Y.; Chen, N.; Cai, Y.; Xu, W.; Zhang, F. Gemini II: Design, Modeling, and Control of a Compact Yet Efficient Servoless Bi-Copter. IEEE/ASME Trans. Mechatron. 2022, 27, 4304–4315. [Google Scholar] [CrossRef]
- Albayrak, O.B.; Ersan, Y.; Bagbasi, A.S.; Turgut Basaranoglu, A.; Arikan, K.B. Design of a Robotic Bicopter. In Proceedings of the 2019 7th International Conference on Control, Mechatronics and Automation (ICCMA), Delft, The Netherlands, 6–8 November 2019; IEEE: Piscataway Township, NJ, USA, 2019. [Google Scholar]
- Hrecko, L.; Slacka, J.; Halas, M. Bicopter Stabilization Based on IMU Sensors. In Proceedings of the 2015 20th International Conference on Process Control (PC), Strbske Pleso, Slovakia, 9–12 June 2015; IEEE: Piscataway Township, NJ, USA, 2015. [Google Scholar]
- Jadoon, A.N.; Mughees, A.; Ahmad, I.; Sherazi, H.I. Optimal Novel Nonlinear Control Law for Attitude and Heading Control of a Bi-Copter System with Controller-in-Loop. Expert. Syst. Appl. 2025, 272, 126554. [Google Scholar] [CrossRef]
- Tolba, M.; Shirinzadeh, B. Generic Modeling and Control of Unbalanced Multirotor UAVs. Aerosp. Sci. Technol. 2022, 121, 107394. [Google Scholar] [CrossRef]
- Beliautsou, V.; Beliautsou, A. Prop-Plane—New Convertible VTOL UAV as a Combination of a Longitudinal Bicopter and a Flying Wing with a Tilt-Rotor Powertrain. Aerosp. Sci. Technol. 2024, 155, 109650. [Google Scholar] [CrossRef]
- Kumutham, A.R.; Pratihar, D.K.; Deb, A.K. Impact of CoM Placement on Quadcopter’s Performance and Controller Development. In Proceedings of the 2024 36th Conference of Open Innovations Association (FRUCT), Lappeenranta, Finland, 30 October–1 November 2024. [Google Scholar] [CrossRef]
- Durán-Delfín, J.E.; García-Beltrán, C.D.; Guerrero-Sánchez, M.E.; Valencia-Palomo, G.; Hernández-González, O. Modeling and Passivity-Based Control for a convertible fixed-wing VTOL. Appl. Math. Comput. 2024, 461, 128298. [Google Scholar] [CrossRef]
- He, X.; Wang, Y. Design and Trajectory Tracking Control of a New Bi-Copter UAV. IEEE Robot. Autom. Lett. 2022, 7, 9191–9198. [Google Scholar] [CrossRef]
- Abedini, A.; Bataleblu, A.A.; Roshanian, J. Robust Backstepping Control of Position and Attitude for a Bi-Copter Drone. In Proceedings of the 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 17–19 November 2021; IEEE: Piscataway Township, NJ, USA, 2021. [Google Scholar]
- Chang, X.-H.; Liu, Y. Robust H Filtering for Vehicle Sideslip Angle With Quantization and Data Dropouts. IEEE Trans. Veh. Technol. 2020, 69, 10435–10445. [Google Scholar] [CrossRef]
- Jacewicz, M.; Żugaj, M.; Głębocki, R.; Bibik, P. Quadrotor Model for Energy Consumption Analysis. Energies 2022, 15, 7136. [Google Scholar] [CrossRef]
- Olejnik, D.A.; Wang, S.; Dupeyroux, J.; Stroobants, S.; Karasek, M.; De Wagter, C.; de Croon, G. An Experimental Study of Wind Resistance and Power Consumption in MAVs with a Low-Speed Multi-Fan Wind System. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway Township, NJ, USA, 2022. [Google Scholar]
- Gholami, A.H.; Haeri, M.; Tipi, A.R.D. Experimental Comparison of Thrust Performance of Two Low and Medium-Speed Motors by Wind Tunnels and Obtaining the Flight Time of a Specific Drone. J. Aerosp. Sci. Technol. 2020, 13, 10–17. [Google Scholar]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A.; Nawaz, H. Unmanned Aerial Vehicles: A Review. Cogn. Robot. 2023, 3, 8–22. [Google Scholar] [CrossRef]
- Kierzkowski, A.; Dziewoński, B.; Kaliszuk, K.; Kucharski, M. Evaluation of Light Electric Flying-Wing Unmanned Aerial System Energy Consumption During Holding Maneuver. Energies 2025, 18, 1300. [Google Scholar] [CrossRef]
- Hong, T.-K.; Lin, C.-Y.; Lin, H.-J.; Ruseno, N. Taiwan Solar-Powered UAV Flight Endurance Record. Drone Syst. Appl. 2024, 12, 1–14. [Google Scholar] [CrossRef]
- Lin, C.; Lin, T.; Liao, W.; Lan, H.; Lin, J.; Chiu, C.; Danner, A. Solar Power Can Substantially Prolong Maximum Achievable Airtime of Quadcopter Drones. Adv. Sci. 2020, 7, 2001497. [Google Scholar] [CrossRef] [PubMed]
- Silvestro, S. Optimization of an Ultralight Autonomous Drone for Service Robotics. Doctoral Dissertation, Politecnico di Torino Politecnico di Torino, Turin, Italy, 2019. [Google Scholar]
- Adami, A.; Fregonese, L.; Gallo, M.; Helder, J.; Pepe, M.; Treccani, D. Ultra light UAV systems for the metrical documentation of cultural heritage: Applications for architecture and archaeology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 15–21. [Google Scholar] [CrossRef]
- Putsep, K.; Rassolkin, A. Methodology for Flight Controllers for Nano, Micro and Mini Drones Classification. In Proceedings of the 2021 International Conference on Engineering and Emerging Technologies (ICEET), Istanbul, Turkey, 27–28 October 2021; IEEE: Piscataway Township, NJ, USA, 2021. [Google Scholar]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Mandal, J.K. Z-Transform-Based Reversible Encoding; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Available online: https://flywoo.net/products/nin-2104-ultralight-fpv-motor-1750kv-3000kv-silver (accessed on 1 June 2025).
- Available online: https://www.pololu.com/product/2142/resources (accessed on 1 June 2025).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Bicopter | Quadcopter |
|---|---|---|
| Engine | 2x EX1404 3500 kv | 4x EX1404 3500 kv |
| Servo | 2x PowerHD DSM44 | none |
| Flight controller | Speedybee f405 wing mini | Speedybee f405 AIO |
| Optical flow | matek 3901-L0X | matek 3901-L0X |
| Battery | 3s 1300 mAh 100C | 3s 1300 mAh 100C |
| Weight | 231 g | 233 g |
| Dimensions (no propellers) [mm] | 140 × 200 × 72 | 125 × 125 × 55 |
| Dimensions (with propellers) [mm] | 140 × 270 × 72 | 215 × 215 × 55 |
| Units per Configuration | ||||
|---|---|---|---|---|
| Component | Model | Single Unit Cost | Bicopter | Quadcopter |
| BLDC motor | Happymodel EX1404 3500 Kv | $15 | 2 | 4 |
| Propeller | Gemfan 4024 | $0.50 | 2 | 4 |
| Servo | PowerHD DSM44 | $11 | 2 | 0 |
| Flight controller | MicoAir743-AIO-35 A | $60 | 1 | 1 |
| Optical flow sensor | matek 3901-L0X | $35 | 1 | 1 |
| Battery | Li-Pol 3s 1300 mAh CNHL | $14 | 1 | 1 |
| Receiver | FrSky Xm+ | $25 | 1 | 1 |
| Bicopter | Quadcopter | |||||
|---|---|---|---|---|---|---|
| Roll | Pitch | Yaw | Roll | Pitch | Yaw | |
| 65 | 90 | 100 | 40 | 40 | 45 | |
| 75 | 105 | 110 | 75 | 75 | 80 | |
| 30 | 60 | 0 | 23 | 23 | 0 | |
| Bicopter | Quadcopter | |||
|---|---|---|---|---|
| No Wind | Wind | No Wind | Wind | |
| Mean power [W] | 46.56 | 49.56 | 43.89 | 40.40 |
| Power standard deviation [W] | 0.51 | 4.37 | 1.21 | 3.43 |
| Power variation [W] | 0.26 | 19.09 | 1.46 | 11.76 |
| Position x mean deviation [cm] | 20.98 | 10.76 | ||
| Position y mean deviation [cm] | 17.72 | 7.94 | ||
| Gyroscope mean deviation [deg/s] | 0.22 | 0.24 | 0.30 | 0.34 |
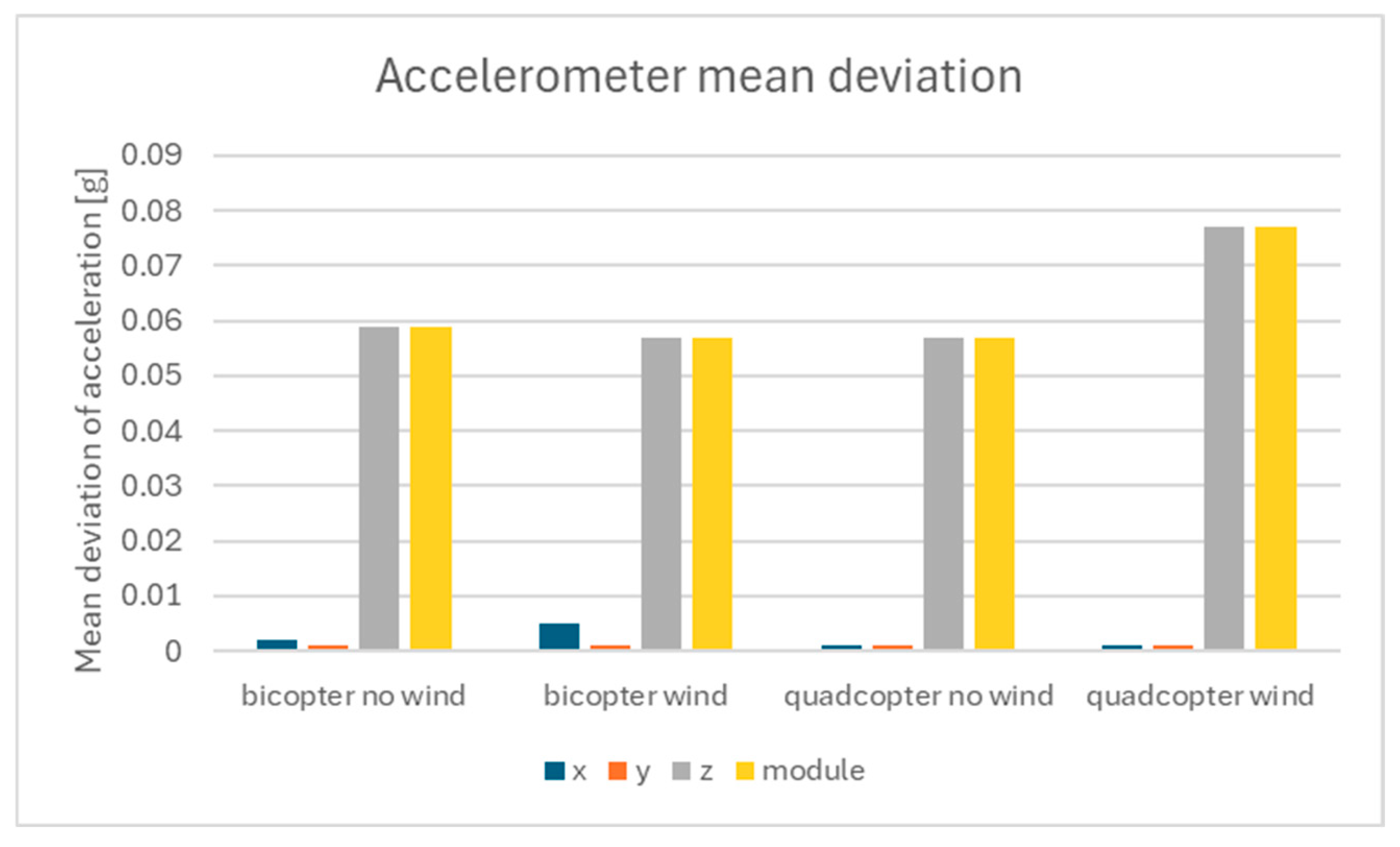
| Accelerometer mean deviation [g] | 0.06 | 0.06 | 0.06 | 0.08 |
| Model | Type | Quality | Gear | Frequency | Weight | Torque | Speed |
|---|---|---|---|---|---|---|---|
| SG90 | Analog | Low | Plastic | 50 Hz | 9 g | 0.177 Nm | 0.1 s/60° |
| MG-90 | Analog | Medium | Metal | 50 Hz | 13.5 g | 0.177 Nm | 0.1 s/60° |
| DSM44 | Digital | High | Metal | 330 Hz | 6 g | 0.117 Nm | 0.09 s/60° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kierzkowski, A.; Woźniak, M.; Bury, P. Comparative Analysis of Energy Efficiency and Position Stability of Sub-250 g Quadcopter and Bicopter with Similar Mass Under Varying Conditions. Energies 2025, 18, 3728. https://doi.org/10.3390/en18143728
Kierzkowski A, Woźniak M, Bury P. Comparative Analysis of Energy Efficiency and Position Stability of Sub-250 g Quadcopter and Bicopter with Similar Mass Under Varying Conditions. Energies. 2025; 18(14):3728. https://doi.org/10.3390/en18143728
Chicago/Turabian StyleKierzkowski, Artur, Mateusz Woźniak, and Paweł Bury. 2025. "Comparative Analysis of Energy Efficiency and Position Stability of Sub-250 g Quadcopter and Bicopter with Similar Mass Under Varying Conditions" Energies 18, no. 14: 3728. https://doi.org/10.3390/en18143728
APA StyleKierzkowski, A., Woźniak, M., & Bury, P. (2025). Comparative Analysis of Energy Efficiency and Position Stability of Sub-250 g Quadcopter and Bicopter with Similar Mass Under Varying Conditions. Energies, 18(14), 3728. https://doi.org/10.3390/en18143728