1. Introduction
Torsional vibrations can have detrimental effects on drilling performance; to minimize these vibrations, many models have been proposed in the literature, wherein the thin drill pipes are characterized by a slender structure, represented by discs with constant stiffness. The bottom hole assembly (BHA) is composed of more thick-walled tubes, which are heavier than normal pipes and have a negligible stiffness coefficient. Whereas the most common models for capturing uncoupled torsional vibrations consist of several parallel discs rotating around their common axis, drill pipes are characterized by the stiffness coefficient K, and drill collars have a damping coefficient C. However, the number of discs varies from one study to another; for example, there are those that consist of a model with
n degrees of freedom in [
1], four degrees of freedom in [
2], and three degrees of freedom in [
3]. Nevertheless, the effects on torsional vibration severity of choosing one of these models and fixing its parameters have not been considered, and the influences of stiffness and damping coefficients have not been discussed before. Modeling the rotary drilling system is a compromise: greater freedoms offer greater precision at the cost of computational complexity, which may potentially lead to control system divergence. Therefore, in this research, a two-degree-of-freedom model required dynamic representation, computational efficiency, and interpretability was proposed to investigate stiffness and damping influences.
An understanding of torsional vibration is not only essential for protecting down-hole equipment but also crucial for making the entire drilling process more energy efficient. Uncontrolled stick–slip converts a large proportion of the mechanical energy provided by the top drive into heat loss, raises fuel consumption, and requires undesirable well control operations that maximize non-productive time. Through the quantitative determination of the way stiffness and damping variations govern the initiation and amplitude of these vibrations, the present research directly contributes to enhancing operating energy efficiency and equipment reliability in fossil–energy production chains. To connect numerical analysis to real working conditions, we incorporated measurement-while-drilling (MWD) data from an Algerian vertical well. Two downhole sensor packages, placed above the bit and at the top of the BHA, recorded torque, RPM, weight-on-bit, standpipe pressure, and tri-axial vibration levels continuously. These measurements were utilized (i) to calibrate the damping and stiffness parameters that define the three models and (ii) to compare simulated stick–slip response with field-measured torsional oscillations. Integrating these field observations into the simulation scenarios ensures that the parametric-variation study simulates realistic drilling conditions, which makes the conclusions more relevant in practice.
Drill string vibration analysis has progressed significantly from simple analyses of coupled axial, lateral, and torsional vibration stability by Ahmadi & Altintas, 2013 in [
4] and early control methods for torsional oscillations by Ullah et al., 2016 in [
5]. The need for more targeted mitigation was identified by later studies, which introduced drilling dynamics models developed specifically for high-frequency torsional oscillation (HFTO) mitigation as introduced by Shen et al., 2020 in [
6] and investigated the influence of parametric variations and rock-bit contact on stick–slip vibrations by Mendil et al., 2021a, 2021b in [
7,
8]. These outcomes were used as the basis of other studies, and control techniques evolved further to include torsional vibration damping through hybrid sliding PID controllers as introduced by Mendil et al., 2021c in [
2]. Moreover, machine-learning approaches, such as support vector machines, were applied for a stick–slip severity evaluation as discussed by Caballero et al., 2021 in [
9]. More recently, Landar et al., 2024a in [
10] developed and tested a Smart 4 controller embedded in the drill string for real-time vibration load measurement during drilling; this controller allowed the real-time control of drilling parameters by operators to avoid equipment failure.
Regarding hardware solutions, Shatskyi et al., 2023 in [
11] proposed a shell shock absorber with dry friction and synthesized a structural hysteresis model for predicting its behavior under cyclic nonmonotonic loading, which demonstrated its potential for enhanced damping in drilling applications. Furthermore, Landar et al., 2024b in [
12] proposed a novel shock absorber design with a torque-responsive screw mechanism with analytical and numerical models to increase vibration damping and tool protection at heavy loads. Their work was based on Velichkovich, 2007 in [
13], who focused on the design optimization of shell springs as elastic elements in drilling dampers.
The horizon further expanded to the application of stochastic analyses of coupled vibrations developed by Volpi et al., 2021 in [
14] and full theoretical–numerical analyses of nonlinear coupled axial–torsional dynamics given by Li et al., 2021 in [
15]. Subsequent research in 2022 further applied machine learning to torsional and lateral vibration severity through the research of Alsaihati & Alotaibi, 2022 in [
16], investigated comprehensive axial–torsional–lateral dynamics under wellbore conditions through the research of Fang et al., 2022 in [
17], and provided experimental validation of the effects of torsional vibration on penetration rate through the research of Barnett et al., 2022 in [
18]. Zhang et al., 2023 in [
19] integrated a review of the HFTO knowledge and led to the current research on integrating vibration data to optimize drilling with advanced decision matrices as described by Barboza et al., 2025 in [
20]. This article is dedicated to studying the influence of these parameter variations on the two-degree-of-freedom model. This paper contributes to the field by offering a targeted comparative analysis of how stiffness and damping affect the severity of torsional vibrations. Its findings, supported by MWD field data, directly enhance drilling operations’ energy efficiency and equipment reliability. To study the influence of the stiffness coefficient K and the damping coefficient C, three sets of values have been selected based on field data and compared for the same model. For the first model set, there is a difference between the two discs’ stiffness coefficient K [
5,
7]. For the second set, there are differences between the two coefficients, namely the stiffness K and the damping coefficient C [
8,
21]. For the third model set, it has been assumed that there is only a difference in the damping coefficient C. The open-loop simulation scenarios were conducted in a MATLAB R2025a environment, and the obtained results demonstrated the influence of variations in the stiffness and damping coefficients on the system response. Based on these simulation results, it was demonstrated that, unlike variations in the stiffness coefficient, variations in the damping coefficient do not have a significant effect on the appearance and severity of torsional vibrations [
9,
16,
22].
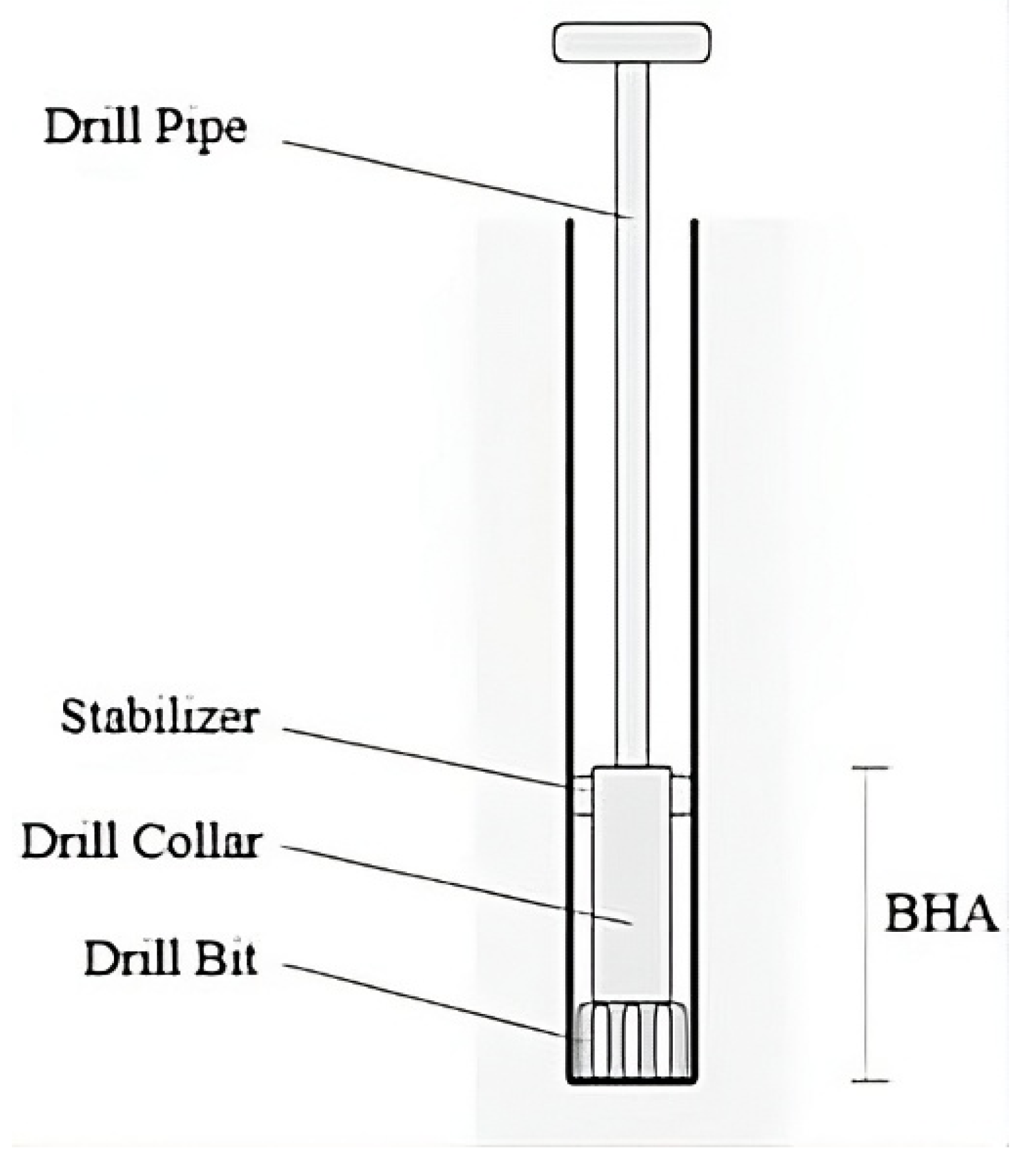
The rest of the manuscript is organized as follows: Section two is dedicated to describing the drill string components to facilitate understanding of the conceptual part of the study. Section three is then dedicated to field observations and the measurement of torsional vibrations. Section four is dedicated to the development of the mathematical model and the methodology proposed to identify the dynamic of the system with different degrees of freedom. Then, section five introduces the simulation results of drill string dynamics in various scenarios of parametric variations that mimic field conditions. This manuscript concludes with final remarks and recommendations for future research.
3. Petroleum Field Measurement of Torsional Vibrations
To develop a reliable mathematical model and obtain accurate simulation results, MWD data was employed from an oil well where torsional vibrations were recorded. The data was collected at two critical locations along the drill string: one just above the drill bit and the other at the top of the BHA.
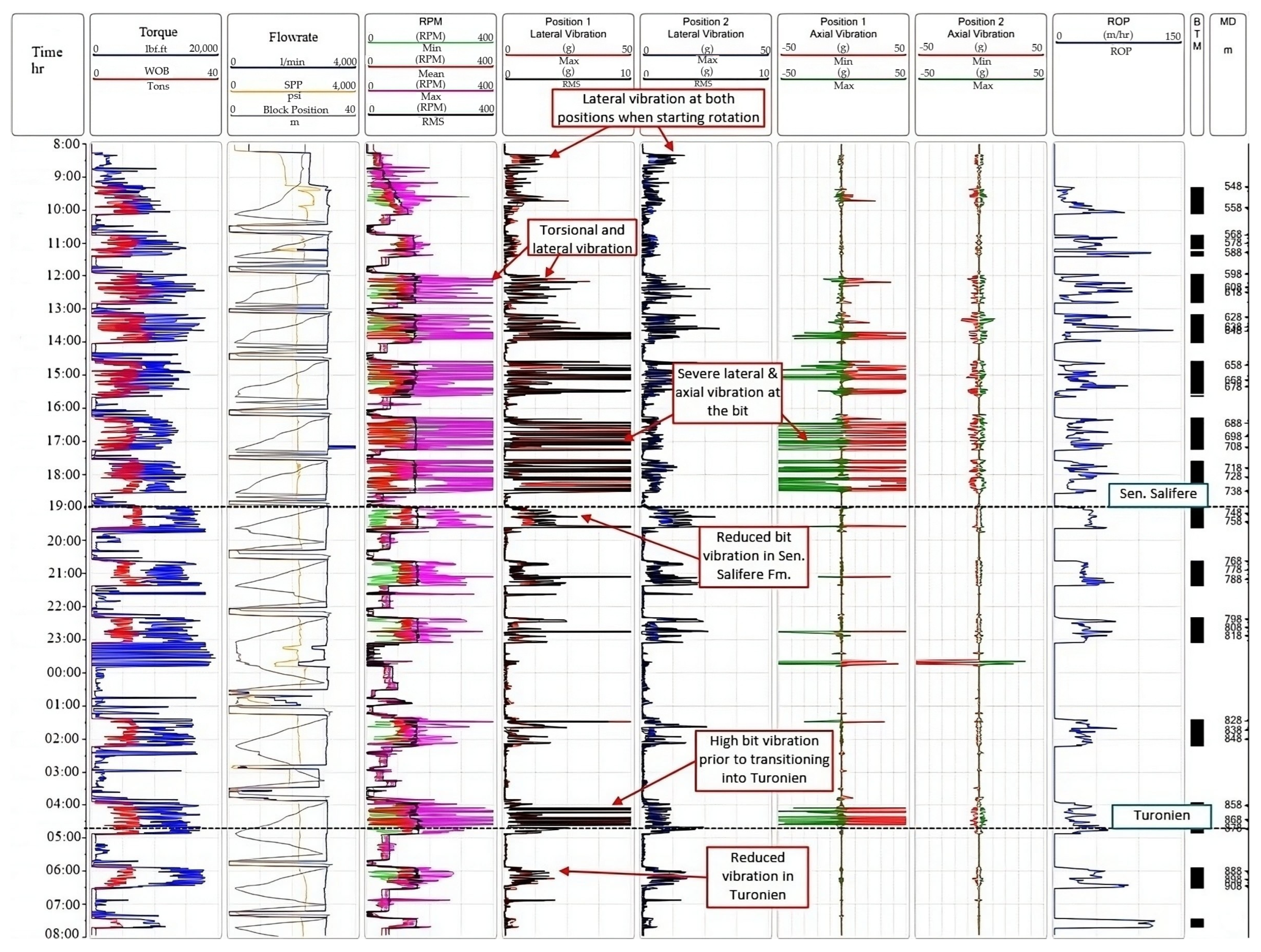
Figure 3 illustrates the various drilling parameters logged during the operation. From left to right, the tracks include the following: time (in hours); torque (in lbf·ft) and weight on bit (WOB, in tons); flow rate (in liters per minute), standpipe pressure (SPP, in psi), and block position (in meters); rotational speed (RPM), including minimum, mean, maximum, and root mean square values; lateral vibrations at position 1 (maximum and RMS in g); lateral vibrations at position 2 (maximum and RMS in g); axial vibrations at position 1 (minimum and maximum in g); axial vibrations at position 2 (minimum and maximum in g); rate of penetration (ROP, in meters per hour); and measured depth (MD, in meters). These measurements provide a comprehensive dataset for analyzing drilling dynamics and calibrating the proposed torsional vibration models. The analysis of this data indicated that the drill string is exposed to coupled torsional and lateral vibrations. However, amplitudes of lateral vibration during the development of torsional are found to be smaller compared to those when lateral vibrations occur independently. Therefore, the present study concentrates on modeling torsional dynamics based on this field data.
As can be seen from
Figure 3, drill string has complex vibratory motion. For instance, between around 8:00 and 10:00 (MD ~540–550 m), the initial rotation phase has heavy lateral vibration at Position 1 and Position 2. Between drilling from around 10:00 and 18:00 (MD ~550–680 m), there is both torsional and lateral vibration with a phase of heavy lateral and axial vibration close to the bit, particularly between 16:00–18:00. Most notably, a reduction in bit vibration is observed when drilling into the Sen. Salifere Formation, approximately between 18:00 and 20:00 (MD ~740–750 m). Then, between 03:00 and 05:00 (MD ~840–860 m), the bit’s high vibration is recorded shortly before penetrating into the Turonien Formation, where a clear reduction in vibration is observed at approximately 05:00. An analysis of these data indicated that the drill string is under coupled torsional and lateral vibrations. However, amplitudes of lateral vibration in the process of torsional development are smaller than in those cases when lateral vibrations occur independently. Therefore, the present research focuses on the modeling of torsional dynamics.
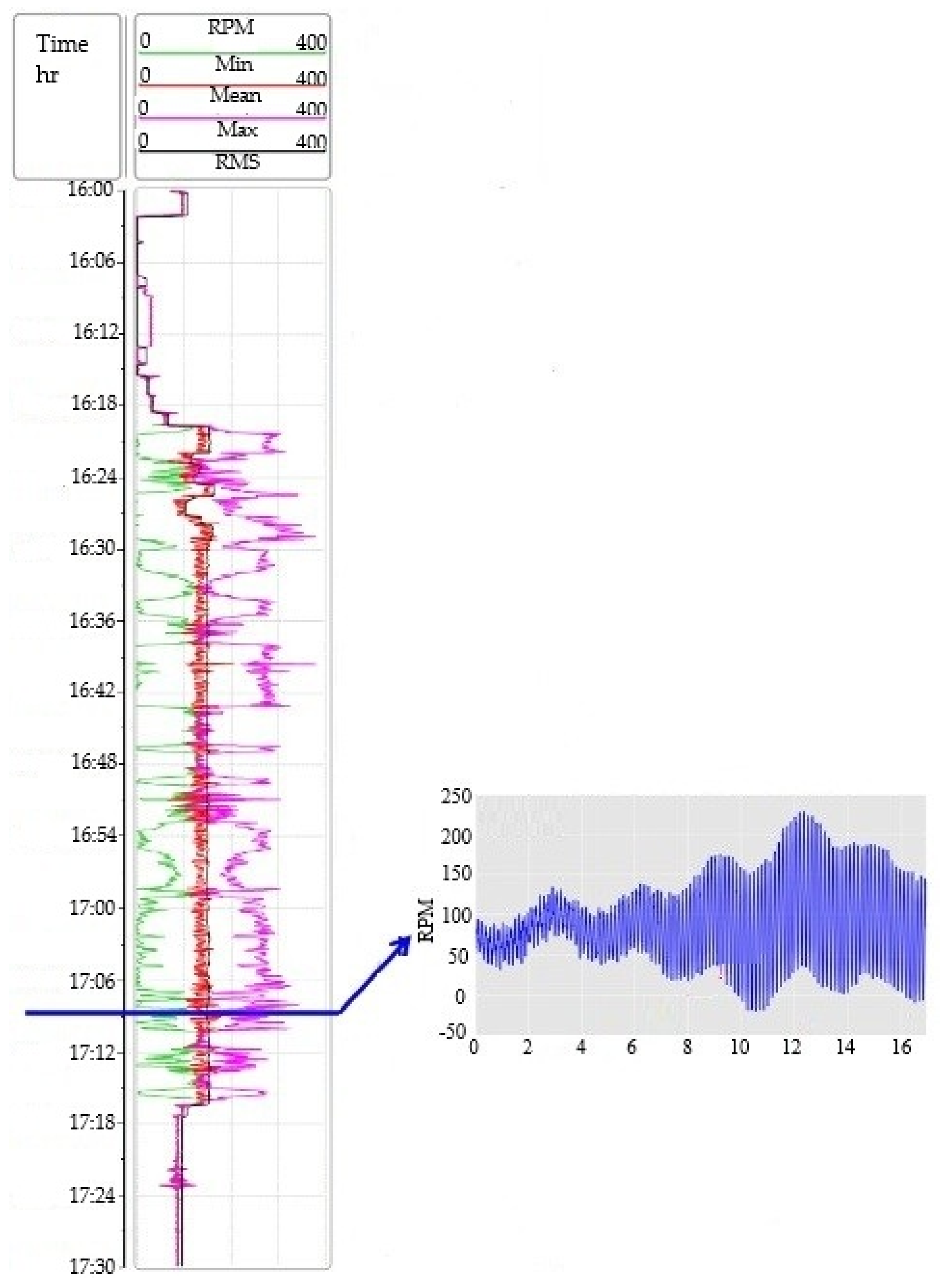
To further examine torsional behavior, a second set of data were measured in the same well one day later, as shown in
Figure 4. The figure illustrates time, torque, WOB, RPM (minimum, mean, maximum, and RMS), and ROP. A closer look at the RPM reading by the sensor near the bit reveals clear variations over time, corresponding to high-frequency torsional fluctuations. These fluctuations decrease drilling efficiency through reduced ROP and increased non-productive time.
From
Figure 4, the negative RPM measurement of the drill bit indicates the severe torsional vibrations. While normally the angular velocity of the drill bit would be continuously positive and consistent (clockwise), the presence of high-frequency torsional vibration levels causes definite sticking and slipping intervals. During the slip regime, energy stored during the stick regime is released, generating lateral vibrations. These side-to-side oscillations are indicated by the shocks that can produce a momentary reversal of the drill bit’s direction of rotation, which is what these negative RPM readings reflect.
To properly control and reduce such vibrations, mathematical models that represent high-frequency torsional dynamics must first be validated for accuracy. The next section, therefore, introduces the mathematical model proposed to examine the influence of stiffness and damping coefficient in torsional behavior encountered in the field.
4. Mathematical Model
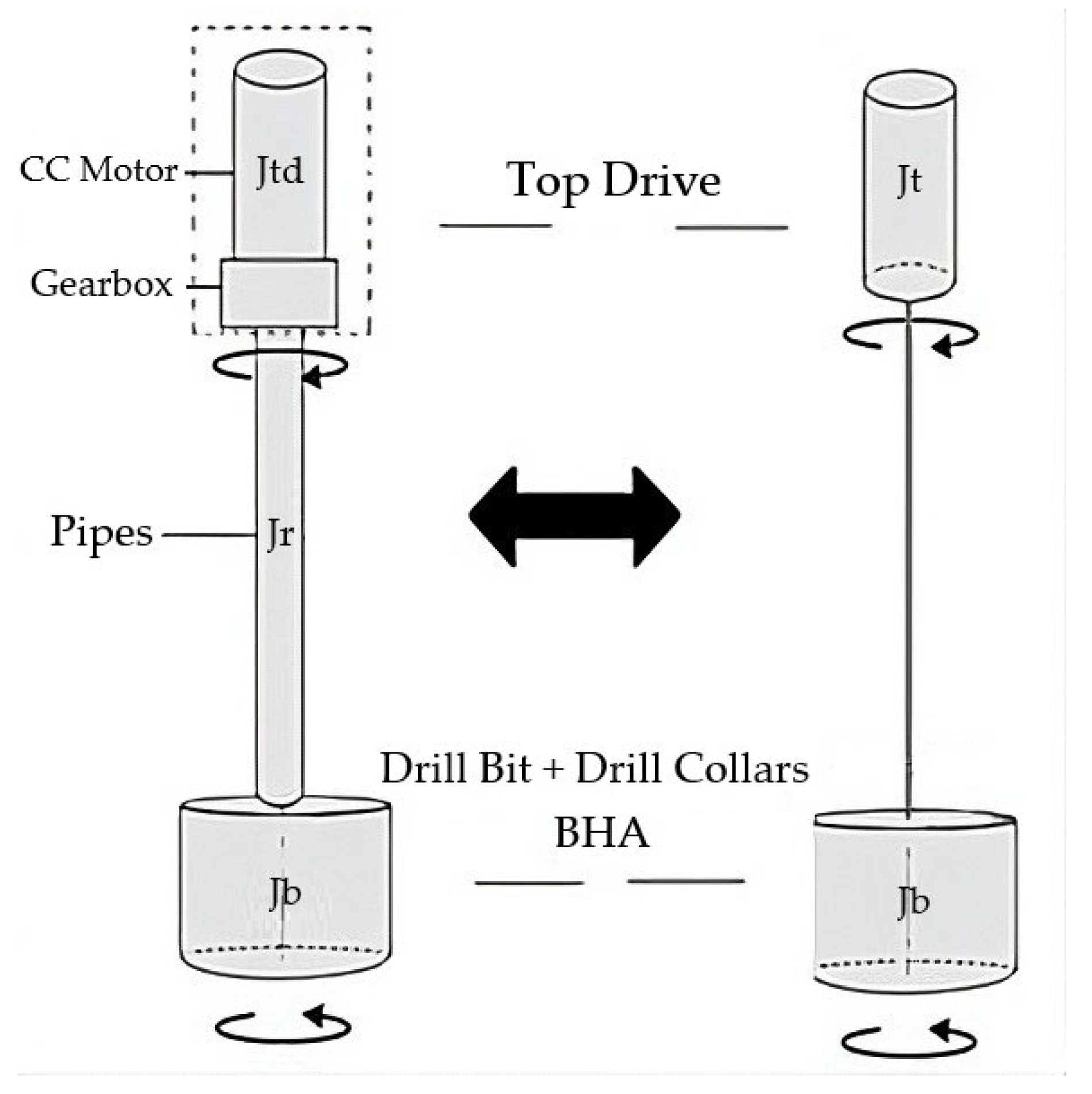
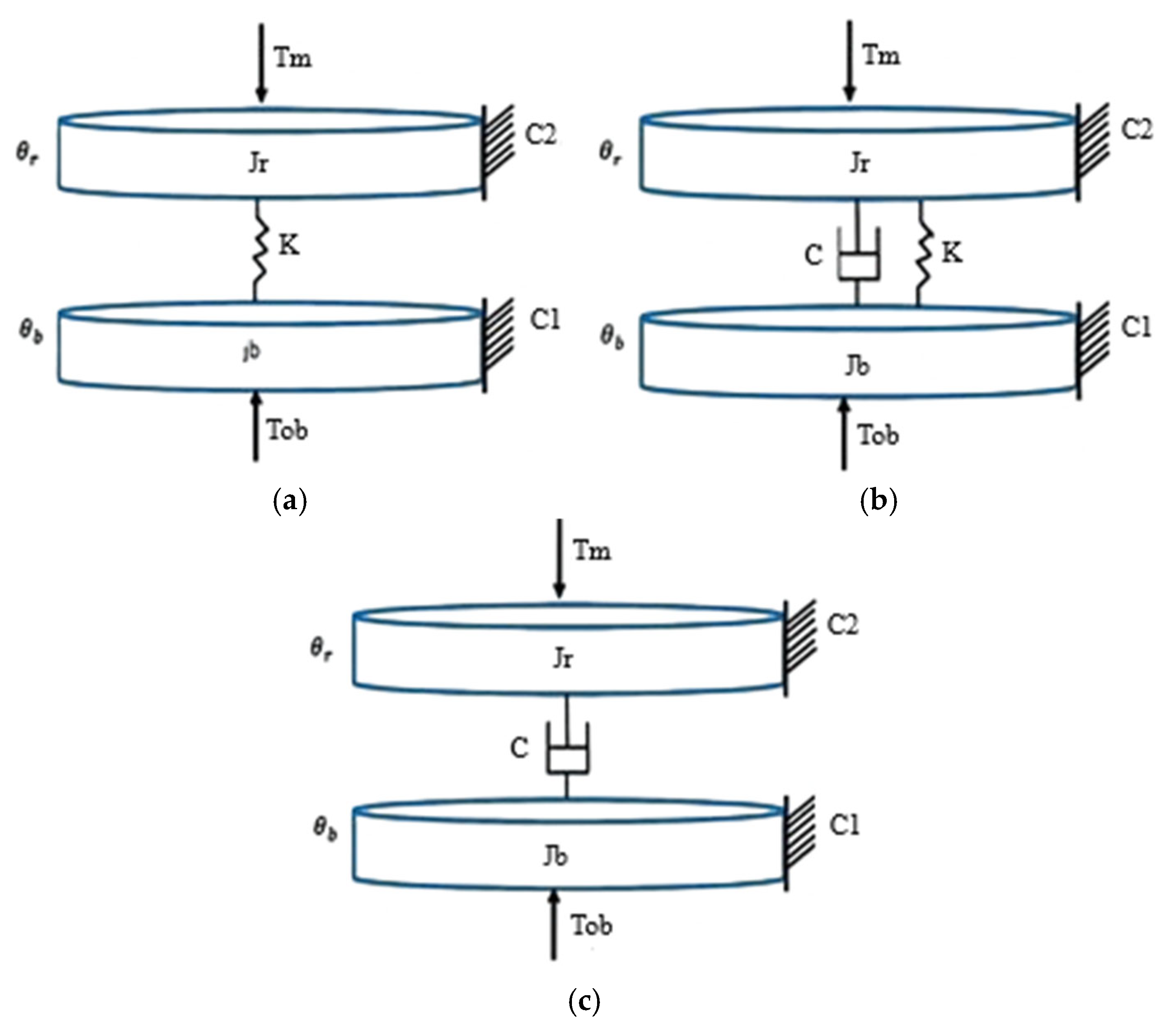
We consider our model in this article to have two degrees of freedom (
Figure 5a), which is represented by two discs: the top drive (rotary table) and the BHA (drill bit with drill collar). The drill pipe is represented as a linear spring with a torsional stiffness coefficient K and a torsional damping coefficient C [
6].
Figure 5a–c illustrate the torsional model, composed of two discs; the first represents the top drive, and the second is the BHA with the drill bit.
is the moment of inertia equivalent to drill collars with the drill bit,
represents the top drive inertia,
is the equivalent viscous damping coefficient of BHA, and
is the viscous damping coefficient at the rotary table.
is a nonlinear function of the torque on bit, and
is the torque supplied by the motor to the system [
24,
25]. The models have the same parameters except that the stiffness coefficient K is different from zero in
Figure 5a. In
Figure 5b, both C and K are different from zero, while for
Figure 5c, only the damping coefficient C is nonzero. The numerical values used in the simulation are summarized in
Table 1.
In this article, we have determined the equation of the motion of the models in
Figure 5a–c by applying Lagrange’s equations, which are applied to external energies as given by Equations (1) and (2).
where E
c is the total kinetic energy of the system with n degrees of freedom, E
p is the total potential energy of deformation, q is the vector of generalized displacements (
), and F is the vector of generalized forces. The Lagrange equations written in kinetic and potential energy and damping functions are given by Equation (3).
Since in this study we present a model with two degrees of freedom (
n = 2), the total kinetic and potential energies, as well as the total damping and generalized forces, are given by Equations (4), (5), (6), and (7), respectively.
While dissipation losses occur along the drill string, they are most frequent at direct contacts between the drill string and the borehole. Such contacts are random but most frequently occur at the drill pipe connections, as these are the weakest links in the drill string. Equation (6) is the mathematical representation of the total damping between the drill bit and the top drive. We have taken for granted that all dissipation damping in all contacts between the drill bit and top drive is cumulative and, therefore, can be summed and considered only as total dissipation damping. This is true for real drilling systems but can be completely wrong if each contact point would generate local stick–slip vibrations with a significant effect on other points in the drill string.
The equation of motion for part 1 (top drive) is found by deriving Equation (3) with respect to
, as given by Equation (8).
The equation of the motion of part 2 (BHA) is found by deriving Equation (3) with respect to
, as given by Equation (9).
4.1. The First Model
The equations of the motion of the first model set are shown in Equation (10).
By inserting the variables’ changes given by Equations (11) and (12) into Equation (10), Equation (13) is obtained.
4.2. The Second Model
The equations of the motion of the second model set are given by Equation (14).
By inserting the changes of variable given by Equations (11) and (12) into Equations (14) and (15) is obtained.
4.3. The Third Model
The equations of the motion of the third model set are given by Equation (16).
By inserting the variables’ changes given by Equations (11) and (12) into Equations (17) and (18) is obtained.
represents the nonlinear relationship between tool and rock [
22]. In this article, the same Karnoop model for these three models is used [
26,
27], and it is given by Equation (19).
with
We have three different models’ sets; this implies that we have three equations of the external torque
as described by Equation (19).
where d is the depth of cut,
is the intrinsic specific energy,
is the bit radius,
is the dynamic dry frictional coefficient,
is the static dry frictional coefficient,
is the weight-on-bit,
= g
; g = 9.8066;
;
is the applied external torque that must overcome the static friction torques
to make the bit move;
is the dynamic friction torque; and
is zero velocity [
28,
29].
The parameters on the transitions in Equation (19) were defined with great caution to the point where any inherent discontinuities are less than our sampling interval of 10−6 s in our simulation. This choice helps to avoid mostly the numerical instability issue within the model. Also, the accuracy provided by this model has turned out to be entirely sufficient for constructing conclusions regarding the influence of the stiffness and damping coefficients on the severity of torsional vibration, the central topic of the current study. While a more advanced, smoothed model can yield slight theoretical advantages, the computational expense of such a model would not add much towards enhancing the findings gained for the scope of this particular study.
A key decision in this model development was the choice of a two-degree-of-freedom (2DOF) model for representing the drilling system. While the real drill string is a continuous system with infinite degrees of freedom, a simplified 2DOF model, comprising the top drive and BHA as lumped masses, provides a sufficient representation for capturing the fundamental torsional dynamics, particularly the stick–slip phenomenon. This simplification significantly reduces the computational complexity compared to higher DOF, which makes simulations more efficient and results easier to interpret physically. Although it may not capture all the intricate responses of a real drilling system, such as localized high-frequency vibrations along the drill pipe or complex interactions with the wellbore, it effectively highlights the dominant influences of key parameters like stiffness and damping on overall torsional vibration severity, which is the primary focus of this study. The balance between capturing essential physics and maintaining tractability is crucial for drawing clear and actionable conclusions, especially when calibrating simulation results with field data.
6. Conclusions
In this paper, three sets of models, varying with the way stiffness and damping were modeled, were carefully tested and simulated against the same input functions, same system parameters, and the same nonlinear rock-bit interaction function (Karnoop model). The parameters of these models were also specifically matched with measurement-while-drilling (MWD) data collected from a drilled well in an Algerian oil field so that the simulations would reflect realistic operating conditions. This comparative study highlighted the effect of significant parameters. It has been demonstrated that the severity of torsional vibrations significantly increases with changing weight on bit (WOB) for both the first model set (only considering stiffness) and the second model set (considering stiffness and damping). This consistency of response across the first two models signifies the predominant role of WOB and drill string stiffness in causing stick–slip oscillations. In contrast, the third set of models involving only damping without any stiffness was remarkably not affected by an increase in WOB with regards to causing or intensifying stick–slip. This finding also concurs with our findings on the indirect limiting role played by damping towards the net severity of torsional vibrations. The simulation scenarios’ results always indicated that the damping coefficient, within the tested ranges, will have no considerable effect on the nature or magnitude of torsional vibrations. However, taking into consideration the damping coefficient used in the model is advisable because it relates to physical mechanisms for dissipating energy along the drill string. Leaving out all the frictional dynamics, although its direct impact on stick–slip severity is proved to be negligible, can lead to a wrong representation of the system’s energy balance. Knowing these specific influences, the behavior and dynamics of the drilling system can be simulated more accurately. Such precision is crucial to develop and implement torsional vibration control without introducing unjustified computational complexity and thereby enhance drilling performance and extend equipment life.
For further improvements, more research should be conducted to consider the spatial deformation and gradients of stiffness along the drill string. The 2DOF model used herein oversimplifies the drill pipe, but a multi-segment approach with non-uniform properties and contact positions would allow for the demonstration of the influence of localized stiffness changes (e.g., at tool joints or due to wellbore curvature) on torsional vibration and high-frequency oscillation. This would generate more efficient mitigation strategies.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}