
Robust Optimal Power Scheduling for Fuel Cell Electric Ships Under Marine Environmental Uncertainty


Abstract
1. Introduction
- An optimal power and voyage scheduling method is developed for PEMFC/BESS hybrid ships operating on coastal round-trip routes. This method optimizes total operational costs by considering fuel costs, degradation costs of fuel cells and BESS, cold-ironing costs, and economically efficient operating speeds.
- A robust optimization-based scheduling approach is proposed to address uncertainties affecting ship speed in marine environments. This method enables the system to flexibly adapt to unforeseen changes or errors, ensuring stable and reliable operation under varying conditions.
- A strategy specifically designed for zero-emission ships powered solely by fuel cells is introduced. By leveraging the high efficiency of PEMFCs during low-load operation, this method employs a preplanned schedule covering a range of uncertainty scenarios. It allows multiple PEMFCs to operate concurrently while maintaining each cell within its optimal low-load, high-efficiency region.
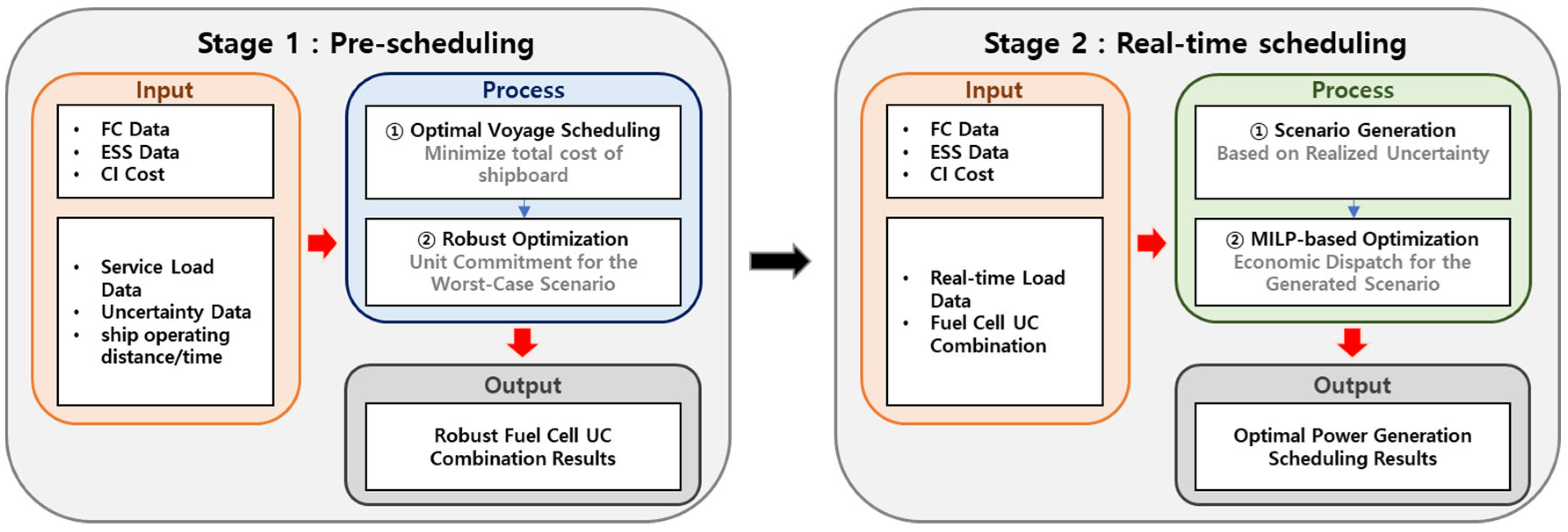
2. Problem Description
- Stage 1 (Pre-scheduling): Power generation and voyage planning are optimized over predicted load scenarios to produce a unit commitment (UC) plan. This plan defines on-off schedules for PEMFC and BESS units in advance of the voyage.
- Stage 2 (Real-time scheduling): During ship operation, economic dispatch (ED) follows the UC plan to accommodate actual load fluctuations. Generation outputs are adjusted in real time to track the true power demand.
2.1. Optimal Power Generation Scheduling for PEMFC/BESS Shipboard Power System
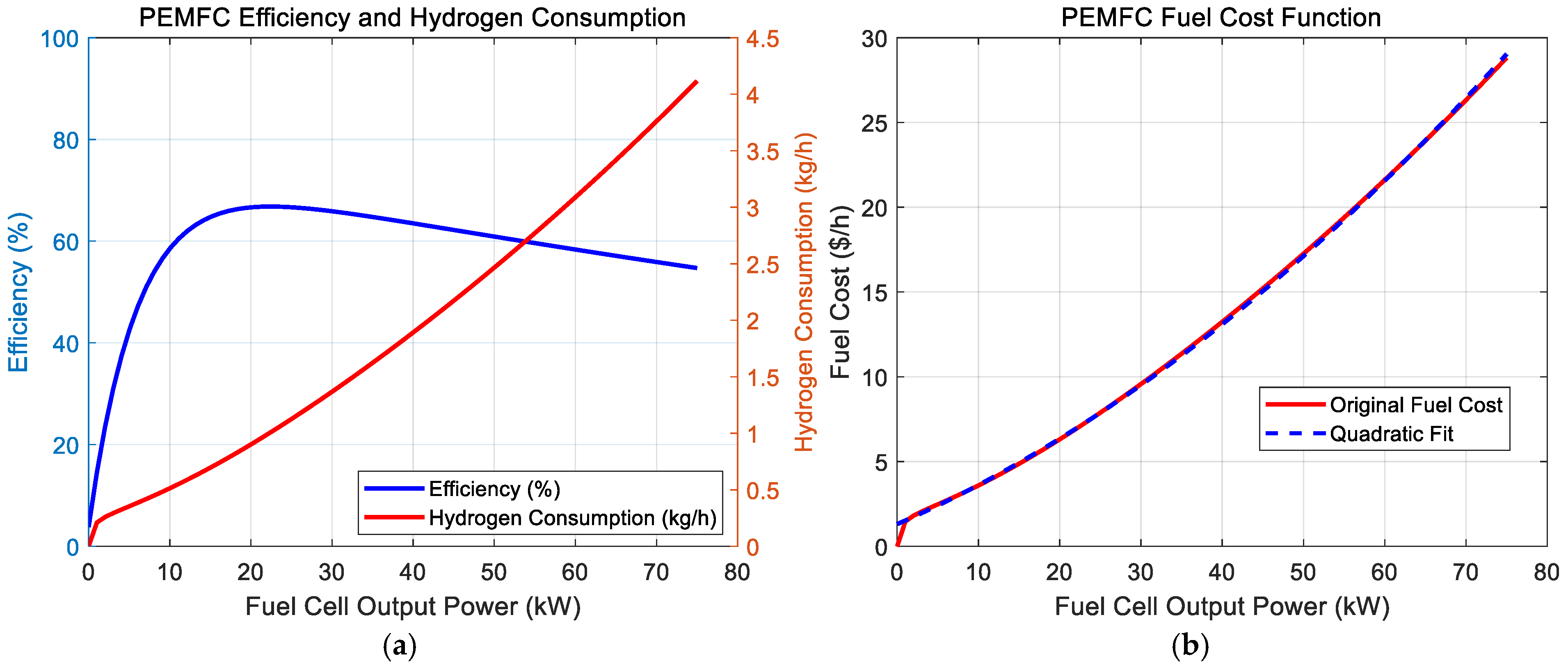
2.1.1. PEMFC Cost Function
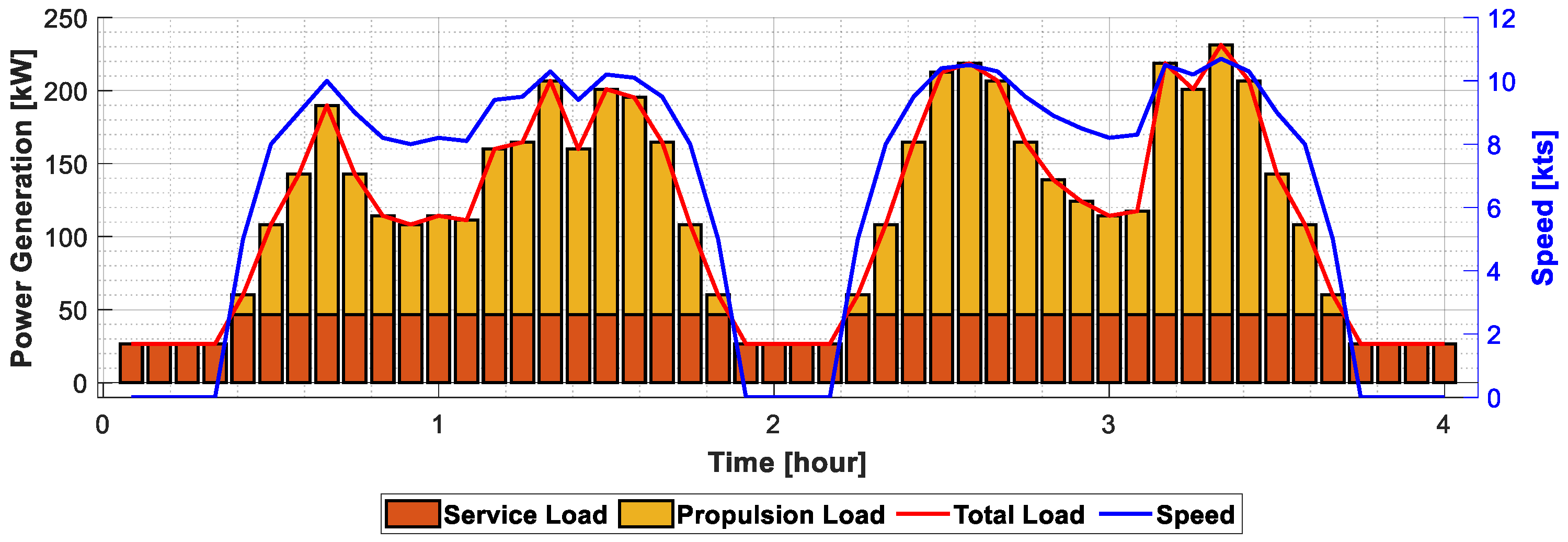
2.1.2. Propulsion Load
2.1.3. Voyage Scheduling
2.2. Robust Optimization for PEMFC/BESS Shipboard Power System
2.2.1. Robust Optimization
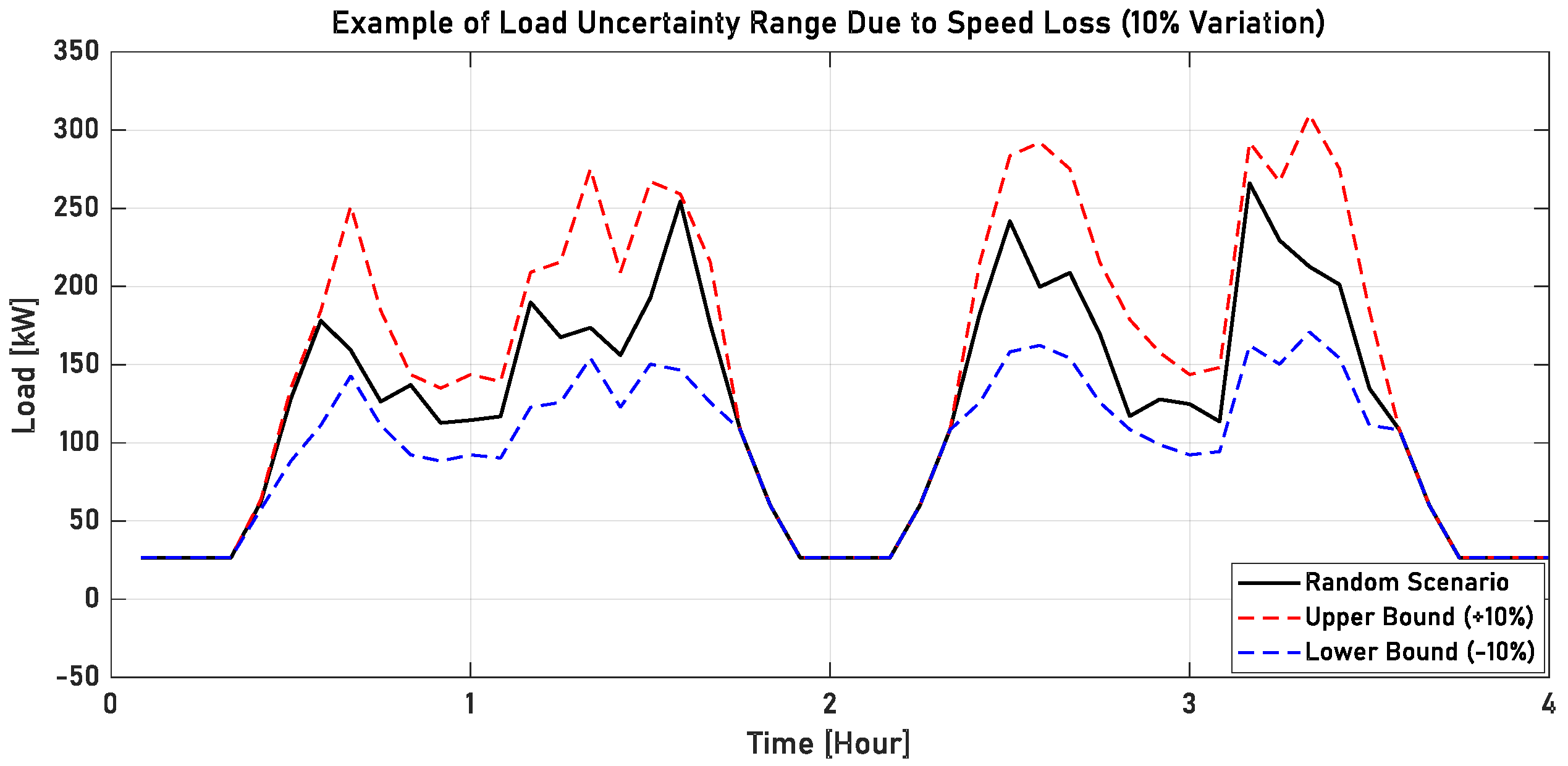
2.2.2. Uncertainty in Marine Environments
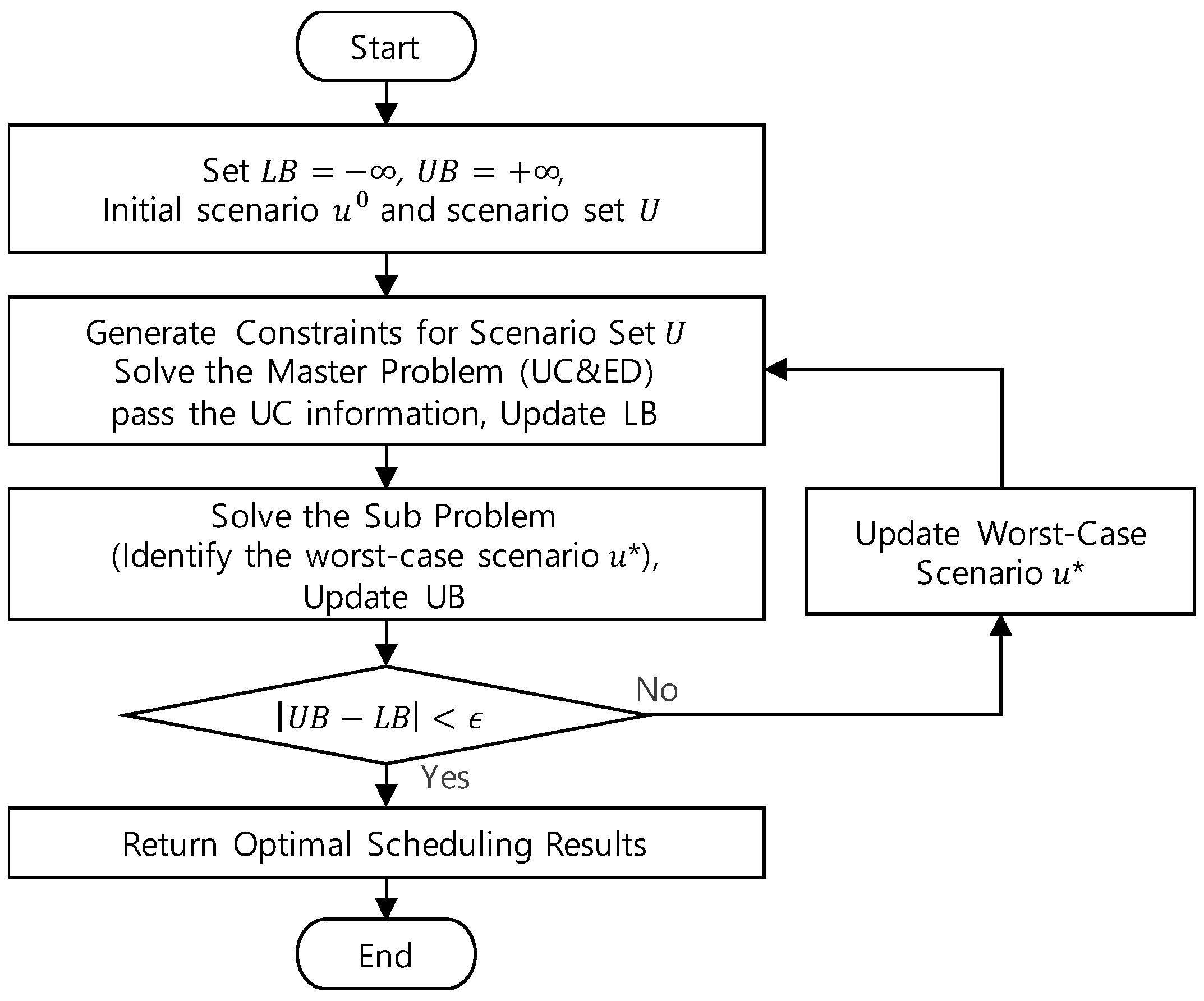
2.2.3. Column-and-Constraint Generation Method
- A Master Problem, which optimizes scheduling based on a predefined set of uncertainty scenarios.
- A Subproblem, which identifies and adds new worst-case scenarios to the set [29].
3. Mathematical Description
3.1. Optimal Operation of PEMFC/BESS Shipboard Power System with Voyage Scheduling
3.1.1. Objective
3.1.2. Constraints
Power Balance Constraints
FC Constraints
BESS Constraints
Cold-Ironing Constraints
Voyage Scheduling Constraints
3.2. Method 2: Robust Optimal Operation of PEMFC/BESS Shipboard Power System Considering Environmental Uncertainties
3.2.1. Objective of First Stage
3.2.2. Objective of Second Stage
4. Simulation and Results
4.1. Simulation Setup
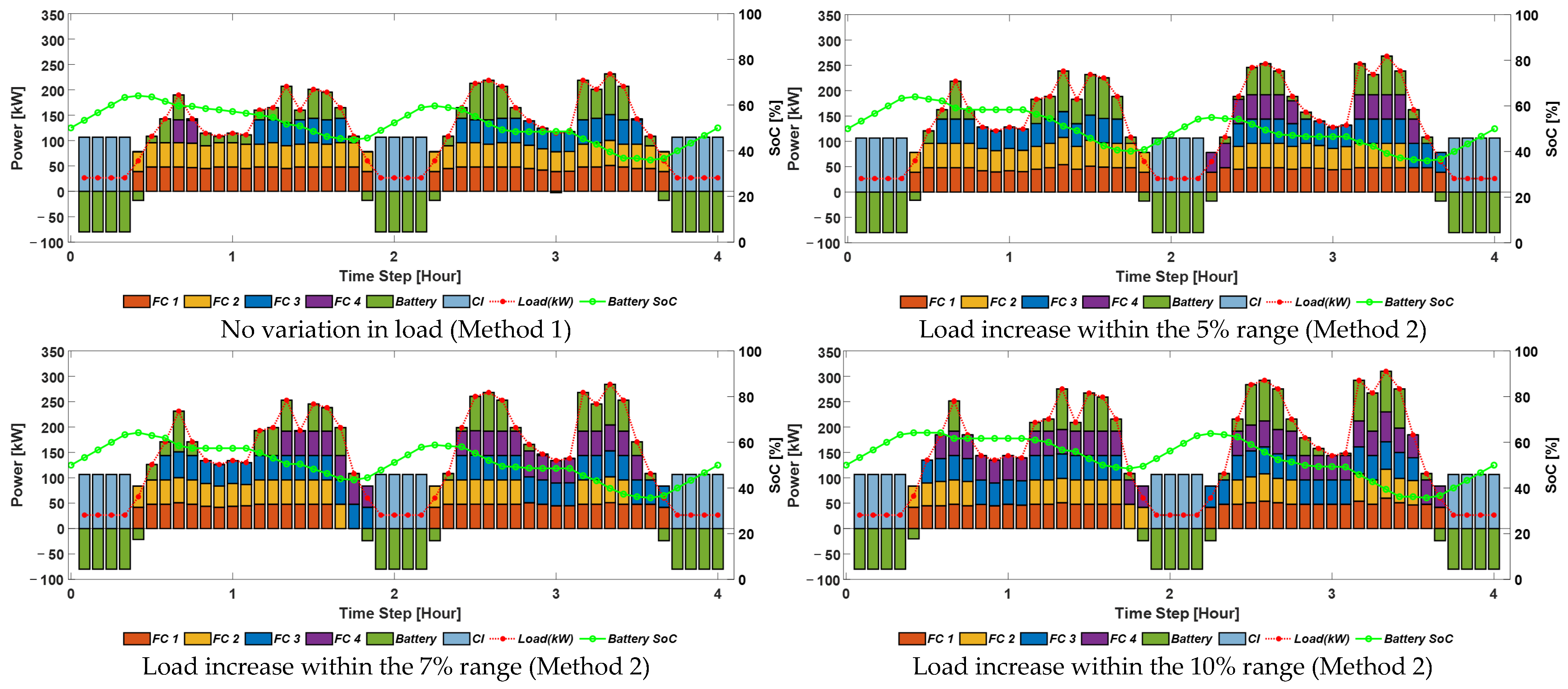
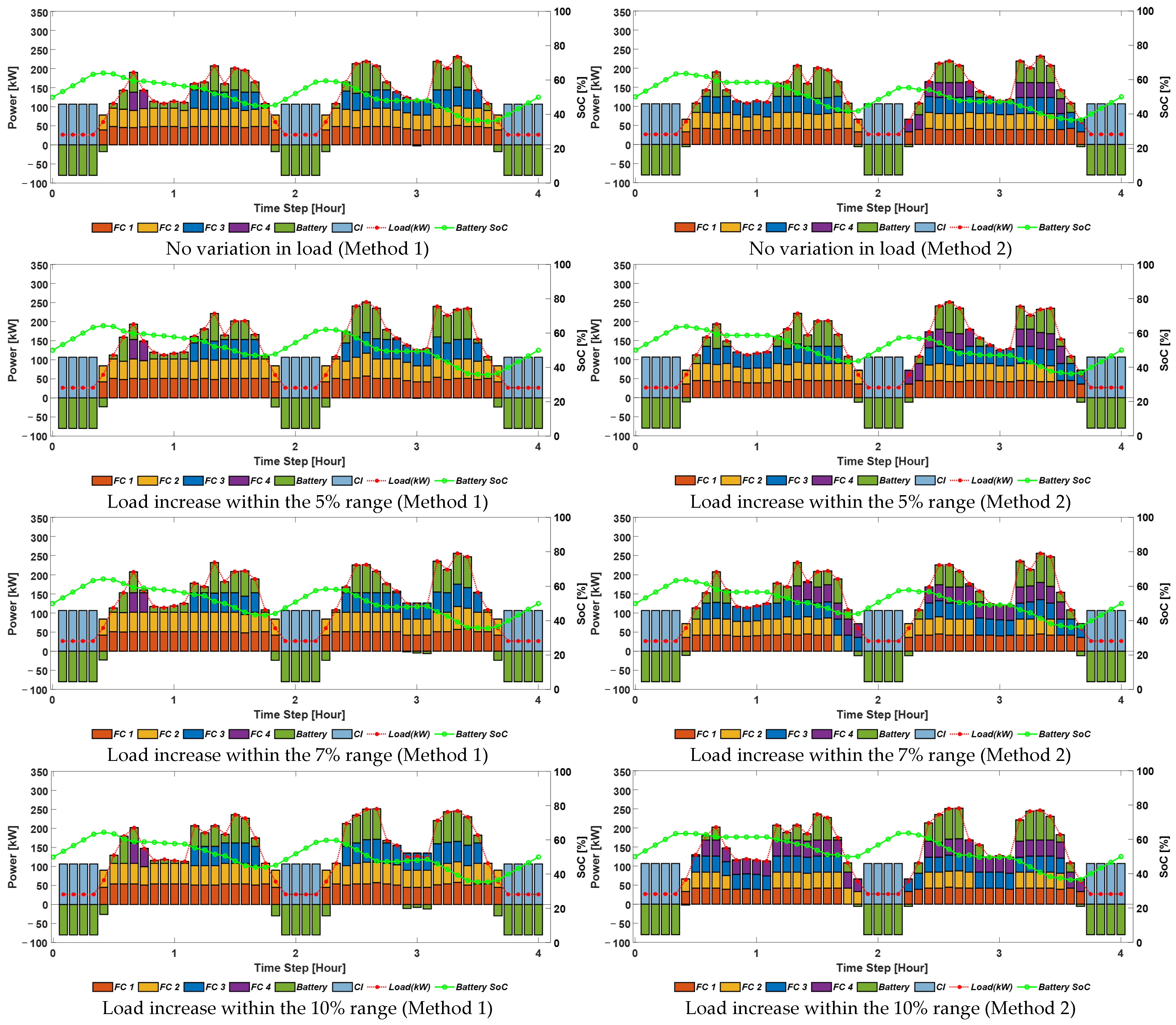
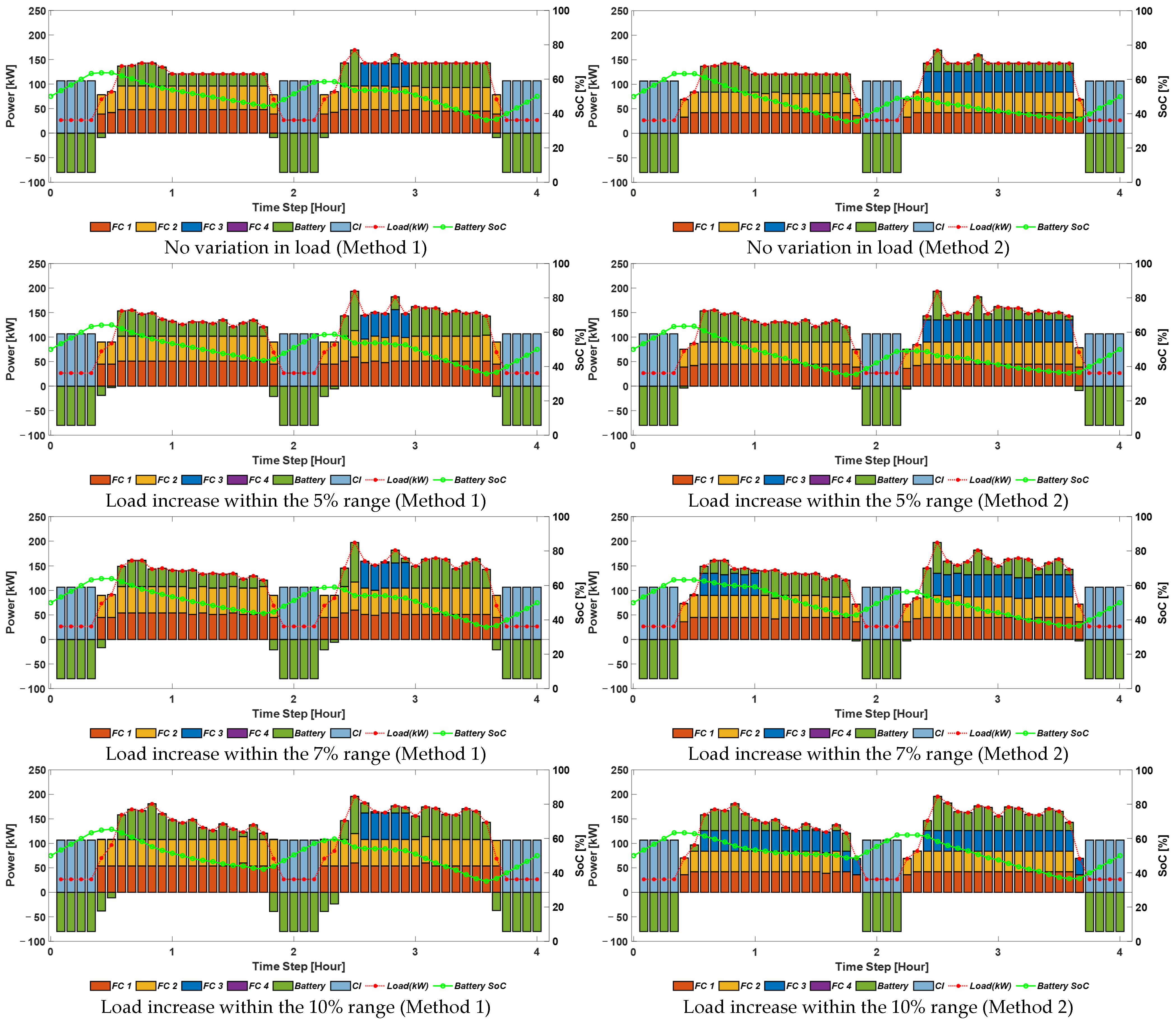
4.2. Optimal Power Generation Scheduling: Results and Analysis
4.3. Voyage Scheduling Analysis
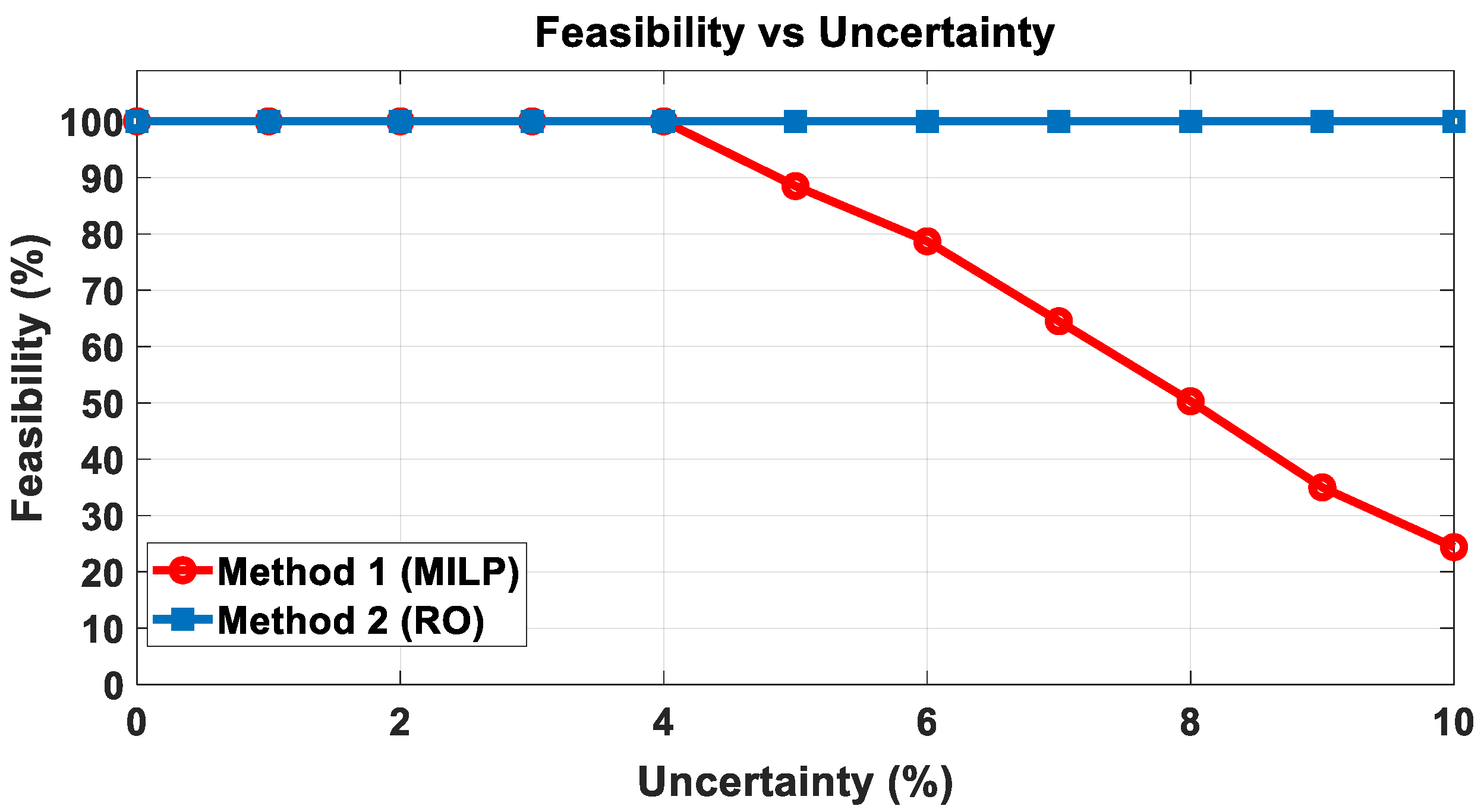
4.4. Sensitivity Analysis to Uncertainty
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms | |
| BESS | Battery energy storage system |
| CI | Cold-ironing |
| C&CG | Column-and-constraint generation |
| DC | Direct current |
| ED | Economic dispatch |
| ESS | Energy storage system |
| MILP | Mixed-integer linear programming |
| PEMFC | Polymer electrolyte membrane fuel cell |
| SOC | State of charge |
| UC | Unit commitment |
| Variable and parameters | |
| Voltage drop per hour during high-power operation (μV/h) | |
| Voltage drop per hour during low-power operation (μV/h) | |
| Voltage drop per startup event (μV/start) | |
| Degradation cost incurred by the BESS due to discharge at time t ($) | |
| Fuel cost of the ith PEMFC at time t ($) | |
| Degradation cost of the ith PEMFC at time t ($) | |
| Hydrogen cost (price) ($/kg) | |
| Degradation cost due to high-power operation for the ith PEMFC at time t ($) | |
| Degradation cost due to operating state for the ith PEMFC at time t ($) | |
| Degradation cost due to low-power operation for the ith PEMFC at time t ($) | |
| Degradation cost due to startup operations for the ith PEMFC at time t ($) | |
| Cost of cold-ironing power at time t ($) | |
| Speed uncertainty factor (dimensionless) | |
| Total energy capacity of the BESS (kWh) | |
| Energy output of the ith PEMFC (kWh) | |
| Lower heating value of hydrogen (kWh/kg) | |
| Energy-to-hydrogen conversion factor (kg/kWh) | |
| Mass of hydrogen consumed (kg) | |
| Number of PEMFC units (dimensionless) | |
| BESS charge power at time t (kW) | |
| BESS discharge power at time t (kW) | |
| Cold-ironing power usage at time t (kW) | |
| Output power of the ith PEMFC at time t (kW) | |
| Total load demand at time t (kW) | |
| Propulsion load as a function of ship speed v (kW) | |
| Cost of the PEMFC stack ($) | |
| State of charge of the BESS at time t (%) | |
| Minimum allowable BESS state of charge (%) | |
| Maximum allowable BESS state of charge (%) | |
| Initial BESS state of charge at voyage start (%) | |
| Final BESS state of charge at voyage end (%) | |
| Expected lifespan of the PEMFC (h) | |
| High-power operation time for the ith PEMFC at time t (h) | |
| Low-power operation time for the ith PEMFC at time t (h) | |
| Binary variable indicating whether the ith PEMFC is on at time t | |
| Binary variable representing the charging/discharging state of the BESS | |
| Binary variable indicating a startup event for the PEMFC at time t | |
| Charging efficiency of the BESS (%) | |
| Discharge efficiency of the BESS (%) | |
Appendix A
Polynomial Fitting Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polynomial Order | RMSE ($/h) | R2 |
|---|---|---|
| Linear (1st) | 1.2531 | 0.9843 |
| Quadratic (2nd) | 0.1499 | 0.9997 |
| Cubic (3rd) | 0.1499 | 0.9997 |
| Quartic (4th) | 0.1473 | 0.9997 |
| Polynomial Order | RMSE (kW) | R2 |
|---|---|---|
| Linear (1st) | 27.446 | 0.9376 |
| Quadratic (2nd) | 1.2325 | 0.9999 |
| Cubic (3rd) | 6.33 × 10−14 | 1.0000 |
References
- International Maritime Organization. 2023 IMO Strategy on Reduction of GHG Emissions from Ships (MEPC 80/WP.12, Annex 1); International Maritime Organization: London, UK, 2023. [Google Scholar]
- Korea Maritime Cooperation Center. International Trend for Maritime Decarbonization; Korea Maritime Cooperation Center: Sejong-si, Republic of Korea, 2023; Volume 7. [Google Scholar]
- Kim, S.N.; Park, Y.H. DC Electric propulsion ship technology trend. Korean Inst. Electr. Eng. 2018, 67, 25–31. [Google Scholar]
- Jeong, D.W. Optimal Operation Strategy for Power Generation System of Electric Propulsion Ships Based on Lagrangian Relaxation Method for Fuel Cost Reduction. Master’s Thesis, Kookmin University, Seoul, Republic of Korea, 2022. [Google Scholar]
- Lee, J.M.; Kim, J.H.; Kim, S.G.; Kim, T.W.; Kim, M.S. Overview and technology development trends of hydrogen fuel cell ships. Bull. Soc. Nav. Archit. Korea 2019, 56, 3–9. [Google Scholar]
- Seo, Y.S.; Cho, J.H.; Lee, J.M.; Kim, B.S. Development Trends and Directions of Hydrogen Fuel Cell Technology for Ships; KEIT PD Issue Report; Korea Institute for Advancement of Technology: Seoul, Republic of Korea, 2019. [Google Scholar]
- Chandran, M.; Palaniswamy, K.; Karthik Babu, N.B.; Das, O. A study of the influence of current ramp rate on the performance of polymer electrolyte membrane fuel cell. Sci. Rep. 2022, 12, 21888. [Google Scholar] [CrossRef] [PubMed]
- Pivetta, D.; Dall’Armi, C.; Taccani, R. Multi-objective optimization of hybrid PEMFC/Li-ion battery propulsion systems for small and medium size ferries. Int. J. Hydrogen Energy 2021, 46, 35949–35960. [Google Scholar] [CrossRef]
- Switch Maritime. Available online: https://www.switchmaritime.com/ (accessed on 1 January 2025).
- Choi, C.H.; Yu, S.; Han, I.S.; Kho, B.K.; Kang, D.G.; Lee, H.Y.; Seo, M.S.; Kong, J.W.; Kim, G.; Ahn, J.W.; et al. Development and demonstration of PEM fuel-cell-battery hybrid system for propulsion of tourist boat. Int. J. Hydrogen Energy 2016, 41, 3591–3599. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Anvari-Moghaddam, A.; Guerrero, J.M. A cost-effective and emission-aware power management system for ships with integrated full Electric propulsion. Electr. Power Syst. Res. 2017, 150, 63–75. [Google Scholar] [CrossRef]
- Aziz, M.; Trinh, P.-H.; Hudaya, C.; Chung, I.-Y. Coordinated control strategy for hybrid multi-PEMFC/BESS in a shipboard power system. Electr. Power Syst. Res. 2025, 243, 111495. [Google Scholar] [CrossRef]
- Fang, S.; Xu, Y.; Li, Z.; Zhao, T.; Wang, H. Two-step multi-objective management of hybrid energy storage system in all-Electric ship microgrids. IEEE Trans. Veh. Technol. 2019, 68, 3361–3373. [Google Scholar] [CrossRef]
- Taheri, S.I.; Vieira, G.G.T.; Salles, M.B.C.; Avila, S.L. A trip-ahead strategy for optimal energy dispatch in ship power systems. Electr. Power Syst. Res. 2021, 192, 106917. [Google Scholar] [CrossRef]
- Shapiro, A. Topics in Stochastic Programming; CORE Lecture Series; Universite Catholique de Louvain: Ottignies-Louvain-la-Neuve, Belgium, 2011. [Google Scholar]
- Jin, Y.; Wang, H.; Chugh, T.; Guo, D.; Miettinen, K. Data-Driven Evolutionary Optimization: An Overview and Case Studies. IEEE Trans. Evol. Comput. 2019, 23, 442–458. [Google Scholar] [CrossRef]
- Ksciuk, J.; Kuhlemann, S.; Tierney, K.; Koberstein, A. Uncertainty in maritime ship routing and scheduling: A literature review. Eur. J. Oper. Res. 2023, 308, 499–524. [Google Scholar] [CrossRef]
- Fang, S.; Xu, Y.; Wang, H.; Shang, C.; Feng, X. Robust operation of shipboard microgrids with multiple-battery energy storage system under navigation uncertainties. IEEE Trans. Veh. Technol. 2020, 69, 10531–10544. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Fang, S.; Zheng, X.; Feng, X. Robust coordination of a hybrid AC/DC multi-energy ship microgrid with flexible voyage and thermal loads. IEEE Trans. Smart Grid 2020, 11, 2782–2793. [Google Scholar] [CrossRef]
- Kim, G.B.; Aziz, M.; Trinh, P.H.; Chung, I.Y. Optimal design and scheduling methods for fuel cell and battery energy storage systems in Electric ships. In Proceedings of the ICEE Conference, Kitakyushu, Japan, 30 June–4 July 2024. [Google Scholar]
- Sery, J.; Leduc, P. Fuel cell behavior and energy balance on board a Hyundai Nexø. Int. J. Engine Res. 2022, 23, 709–720. [Google Scholar] [CrossRef]
- Banaei, M.; Rafiei, M. A comparative analysis of optimal operation scenarios in hybrid emission-free ferry ships. IEEE Trans. Transp. Electrif. 2020, 6, 318–333. [Google Scholar] [CrossRef]
- Jeong, B.H. Generator Scheduling Methods for Fuel Cost Reduction in Electrical Shipboard Power Systems Using Load Forecasting. Master’s Thesis, Kookmin University, Seoul, Republic of Korea, 2023. [Google Scholar]
- Angkasa, F.F. Optimal Power Generation and Voyage Scheduling with Operating Reserve Management for Electric Ship. Master’s Thesis, Kookmin University, Seoul, Republic of Korea, 2022. [Google Scholar]
- Fan, F.; Aditya, V.; Xu, Y.; Cheong, B.; Gupta, A.K. Robustly coordinated operation of a ship microgrid with hybrid propulsion systems and hydrogen fuel cells. Appl. Energy 2022, 312, 118738. [Google Scholar] [CrossRef]
- Bialystocki, N.; Konovessis, D. On the estimation of ship’s fuel consumption and speed curve: A statistical approach. J. Ocean Eng. Sci. 2016, 1, 157–166. [Google Scholar] [CrossRef]
- Zhao, L.; Zeng, B. An Exact Algorithm for Two-Stage Robust Optimization with Mixed Integer Recourse Problems. 2012. Available online: https://optimization-online.org/2012/ (accessed on 1 January 2025).
- Zeng, B.; Zhao, L. Solving two-stage robust optimization problems using a column-and-constraint generation method. Oper. Res. Lett. 2013, 41, 457–461. [Google Scholar] [CrossRef]
- Liu, R.S.; Hsu, Y.F. A scalable and robust approach to demand side management for smart grids with uncertain renewable power generation and bi-directional energy trading. Int. J. Electr. Power Energy Syst. 2018, 97, 396–407. [Google Scholar] [CrossRef]
- Li, M.; Liu, H.; Yan, M.; Xu, H.; He, H. A novel multi-objective energy management strategy for fuel cell buses quantifying fuel cell degradation as operating cost. Sustainability 2022, 14, 16190. [Google Scholar] [CrossRef]


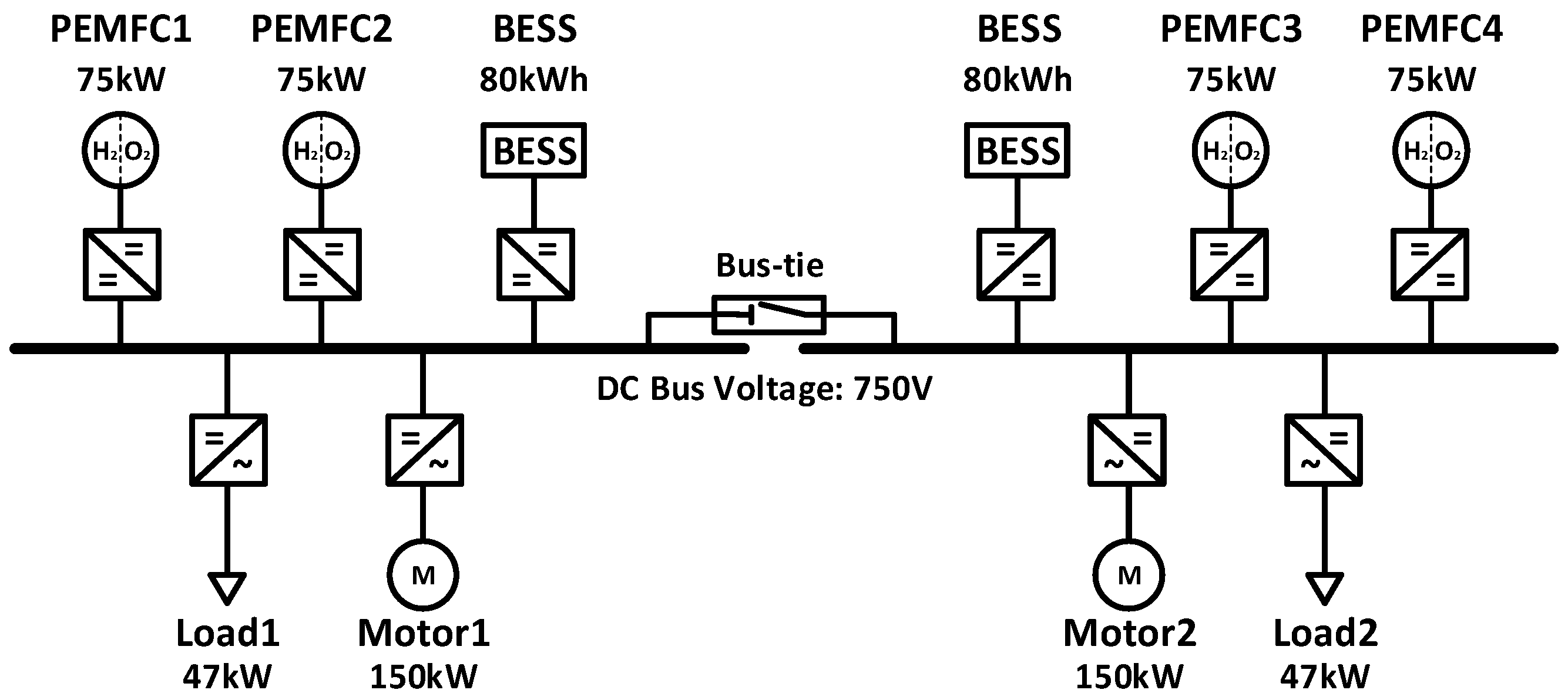


| Components | Capacity |
|---|---|
| PEMFC | 75 kW |
| BESS | 80 kWh |
| Propulsion Motor | 150 kW |
| Main Bus | 750 V |
| PEMFC Output and Operating Range | ||||
| Type | Rated Capacity (kW) | Minimum Output (kW) | Maximum Output (kW) | |
| PEMFC | 75 | 7.5 | 67.5 | |
| BESS Output and Operating Range | ||||
| Type | Rated Capacity (kWh) | Min, Max SOC (%) | C-rate | Converter Efficiency (%) |
| BESS | 80 | 10, 90 | 0.5 | 95 |
| PEMFC Cost Function | |||
| 0.001019 | 0.9959 | 6.244 | |
| Propulsion motor | |||
| 0.3274 | −2.585 | 7.426 | 0.0131 |
| Parameters | |||
| Hydrogen Cost ($) | 7 | ($/kWh) | 0.38 |
| (kg/kWh) | 0.03 | ($/kWh) | 0.01 |
| (μV) | 10, 8.662, 23.91 | (μV) | 6000 |
| ($) | 28,000 | (h) | 5000 |
| 1 | , | 10 | |
| No Variation in Load | Load Increase Within the 5% Range | Load Increase Within the 7% Range | Load Increase Within the 10% Range | |||||
|---|---|---|---|---|---|---|---|---|
| Method | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 |
| H2 consumption Cost ($) | 121.98 | 118.90 | 133.65 | 129.82 | 134.73 | 129.87 | 142.02 | 134.98 |
| FC degradation Cost ($) | 37.71 | 43.27 | 44.20 | 43.27 | 50.68 | 44.93 | 57.16 | 48.16 |
| BESS degradation cost ($) | 2.73 | 2.60 | 2.79 | 2.66 | 2.82 | 2.66 | 2.92 | 2.59 |
| Cold-ironing cost ($) | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 |
| Total cost ($) | 173.09 | 175.43 | 191.29 | 186.40 | 198.88 | 188.13 | 212.76 | 196.39 |
| Total cost change ($) | - | 2.34 (+1.35%) | - | −3.27 (−1.89%) | - | −10.76 (−5.41%) | - | −16.37 (−7.69%) |
| H2 cost change ($) | - | −3.08 (−2.53%) | - | −3.81 (−3.13%) | - | −4.85 (−3.60%) | - | −7.03 (−4.95%) |
| Uncertainty Range | 5% | 7% | 10% | |||
|---|---|---|---|---|---|---|
| Method | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 |
| Feasible scenarios | 1344 | 1500 | 1005 | 1500 | 397 | 1500 |
| Infeasible scenarios | 156 (10.4%) | 0 | 495 (33%) | 0 | 1103 (73.53%) | 0 |
| No Variation in Load | Load Increase Within the 5% Range | Load Increase Within the 7% Range | Load Increase Within the 10% Range | |||||
|---|---|---|---|---|---|---|---|---|
| Method | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 |
| H2 consumption Cost ($) | 100.36 | 98.02 | 109.90 | 107.03 | 115.00 | 110.58 | 121.76 | 114.81 |
| FC degradation Cost ($) | 30.49 | 34.38 | 33.74 | 34.38 | 36.98 | 36.44 | 43.46 | 39.94 |
| BESS degradation cost ($) | 2.63 | 2.53 | 2.77 | 2.60 | 2.76 | 2.56 | 3.03 | 2.53 |
| Cold-ironing cost ($) | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 | 10.66 |
| Total cost ($) | 144.14 | 145.59 | 157.07 | 154.67 | 165.39 | 160.24 | 178.91 | 167.95 |
| Total cost change ($) | - | 1.45 (+1.01%) | - | −2.40 (−1.53%) | - | −5.16 (−3.12%) | - | −10.96 (−6.13%) |
| H2 cost change ($) | - | −2.34 (−2.33%) | - | −2.87 (−2.61%) | - | −4.42 (−3.84%) | - | −6.94 (−5.70%) |
| Uncertainty Range | 5% | 7% | 10% | |||
|---|---|---|---|---|---|---|
| Method | Method 1 | Method 2 | Method 1 | Method 2 | Method 1 | Method 2 |
| Feasible scenarios | 1500 | 1500 | 1388 | 1500 | 1193 | 1500 |
| Infeasible scenarios | 0 (0%) | 0 | 112 (7.47%) | 0 | 307 (20.47%) | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, G.; Lee, M.; Chung, I.-Y. Robust Optimal Power Scheduling for Fuel Cell Electric Ships Under Marine Environmental Uncertainty. Energies 2025, 18, 2837. https://doi.org/10.3390/en18112837
Kim G, Lee M, Chung I-Y. Robust Optimal Power Scheduling for Fuel Cell Electric Ships Under Marine Environmental Uncertainty. Energies. 2025; 18(11):2837. https://doi.org/10.3390/en18112837
Chicago/Turabian StyleKim, Gabin, Minji Lee, and Il-Yop Chung. 2025. "Robust Optimal Power Scheduling for Fuel Cell Electric Ships Under Marine Environmental Uncertainty" Energies 18, no. 11: 2837. https://doi.org/10.3390/en18112837
APA StyleKim, G., Lee, M., & Chung, I.-Y. (2025). Robust Optimal Power Scheduling for Fuel Cell Electric Ships Under Marine Environmental Uncertainty. Energies, 18(11), 2837. https://doi.org/10.3390/en18112837