Abstract
The increasing adoption of electric vehicles (EVs) is driving the need for more efficient, scalable, and flexible charging infrastructures. Among the most promising solutions are reconfigurable multi-point multi-power (MPMP) charging stations, which enable dynamic power allocation across multiple charging points operating at discrete power levels. This paper introduces a novel power management strategy for MPMP stations based on Pareto optimization, aiming to minimize the average charging time while ensuring fairness and efficiency. The method dynamically allocates power among charging points to minimize the average charging time across all connected EVs, while adhering to system constraints and the varying charging profiles required to preserve battery health. The proposed approach was validated through simulations in a dynamic scenario involving six EVs with heterogeneous battery capacities and charging profiles. Results demonstrated that the Pareto-based strategy achieved a significantly lower expected average charging time when compared to the first-come first-served strategy (FCFS).
1. Introduction
The transition to electric vehicles (EVs) represents one of the most profound transformations in contemporary mobility, redefining not only transportation systems but also reshaping paradigms in energy usage, sustainability, and future urban planning. With ongoing advances in battery technology, infrastructure expansion, and supportive regulatory frameworks, EVs are paving the way toward a cleaner, more efficient, and environmentally conscious mobility ecosystem.
Nevertheless, this transition is still underway, and several critical challenges remain before EVs can achieve widespread adoption. Among the most pressing is the development of a robust and accessible charging infrastructure capable of meeting growing user demand while coping with the technical constraints inherent to current EV charging systems. In response to the increasing deployment of EVs, substantial innovation has emerged in the design of charging stations (CSs), aiming to reduce charging times, alleviate stress on the electrical grid, and preserve battery health. Additionally, effective power management in stations hosting multiple charging points (CPs) is a key concern—particularly in high-traffic locations, such as highways [1]. Indeed, the limited driving range of EVs combined with relatively long charging times continues to hinder broader adoption.
At worst, traditional CSs consist of a single CP supplying a fixed power level to one vehicle at a time. Even when multiple CPs are available, they often deliver the same power level irrespective of the specific EV model or its charging needs. This static allocation strategy lacks the flexibility required to follow optimal charging profiles [2]. In practice, the available station power is usually divided equally among all active CPs, disregarding the varying demands of connected vehicles, which may require more or less than the nominal CP power. This approach leads to inefficiencies in both energy usage and infrastructure utilization, resulting in longer average charging times and higher operating costs for station owners.
To overcome these limitations, reconfigurable multi-point multi-power (MPMP) charging stations have been proposed as a viable solution. These architectures enable dynamic allocation of power among multiple CPs [3,4], allowing for optimal resource utilization tailored to each EV’s state of charge (SOC) and specific power requirements [5,6]. In fact, ultrafast charging does not follow constant or even constant current–constant voltage (CC-CV) profiles. To preserve battery longevity, a stepped power profile is commonly adopted [7], striking a balance between fast charging and battery health by maximizing the charging current without compromising the battery lifespan [8,9,10]. To implement such optimal profiles, it is essential to adopt flexible solutions that allow dynamic and demand-based power distribution across CPs, without the need to oversize the station’s electrical infrastructure. Within this framework, MPMP stations can reach optimal performance by continuously reallocating power based on real-time system status. In particular, surplus power from underutilized CPs can be redirected to those serving EVs with higher power acceptance, thus reducing average charging times and improving quality of service (QoS) for users [11]. A cornerstone of these reconfigurable systems is their modular architecture, composed of identical power converter modules interconnected to flexibly partition the total station capacity across multiple CPs [11]. This design promotes scalability for future demand scenarios and supports more resilient and adaptive infrastructures [12,13]. The proposed CS model adopts an MPMP configuration that enables concurrent charging of multiple EVs at different power levels through efficient internal power management. The station is built using isolated bidirectional DC-DC converters (IBDCs) based on a dual-active-bridge (DAB) topology [14]. These modules are arranged in an input-parallel/output-parallel (IPOP) configuration, with the input connected to a common DC bus and the outputs routed through a switching matrix. This matrix allows for parallel connection of modules to CPs, supporting reconfigurable power delivery tailored to individual EV demands. The bidirectional nature of DABs further enables integration with vehicle-to-grid (V2G) systems and local energy storage [15,16]. While DAB control strategies are well established, the novelty of this work lies in the power management algorithm specifically designed for MPMP stations. The goal is to minimize the average charging time in dynamic conditions, where not all CPs are occupied and station power availability varies. The proposed approach surpasses conventional power allocation strategies, such as uniform distribution, first-come first-served (FCFS), and SOC- or priority-based schemes [17], which may cause unacceptable discrepancies in the user experience [18].
Instead, this paper adopts a multi-objective decision-making framework grounded in Pareto optimization. This method evaluates trade-offs between conflicting goals, including average charging time, fairness, and energy efficiency, and identifies Pareto-optimal configurations, where no criterion can be improved without worsening another. This approach enables informed, goal-driven selection of the most appropriate power allocation strategy for each scenario. Efficient power management is indeed pivotal in MPMP stations. Advanced control paradigms, such as model predictive control (MPC) [19], AI-driven algorithms [20], and fuzzy logic [21], have been proposed to allocate power dynamically based on vehicle priority, target charging speed, and resource constraints [22]. These reconfigurable stations rely on both hardware and software adaptability to respond to real-time demand fluctuations. This study explores the potential of Pareto optimization to minimize the average charging time in MPMP charging systems. In the considered configuration, each CP operates at discrete power levels of 80 kW, 160 kW, or 240 kW via a dynamic switching matrix that enables real-time reconfiguration based on instantaneous demand and operational constraints [23].
Additionally, the link between the electrochemical behavior of next-generation battery materials and their suitability for integration with intelligent power distribution architectures should also be considered. In fact, emerging solid-state and hybrid battery chemistries offer enhanced thermal stability and response characteristics, which are directly relevant to dynamic load management [24]. Moreover, advances in electrode design and ionic conductivity can impact on the battery response times, thus enabling faster and more efficient power reallocation in real time [25,26].
The remainder of the paper is structured as follows: Section 1 outlines the proposed system architecture, Section 2 introduces the multi-objective function used for MPMP system management, Section 3 presents simulation results, and Section 4 concludes with key findings and future research directions.
2. Charging Station Architecture
Multi-port converters enable simultaneous charging at different power levels, offering enhanced flexibility in the management of EV charging infrastructure. The primary aim of this paper is to minimize the average charging time of EVs present at a charging station at any given moment by suitably reallocating power across individual charging points through a reconfigurable topological structure.
With the growing adoption of electric vehicles, the design and operational management of charging stations have become critical. Without any optimization approach, these stations could become critical bottlenecks in the whole charging infrastructure, particularly on high-traffic routes, thereby hindering the broader adoption of EVs, especially for long-distance travel where fast charging is essential.
The core issue lies in the significant heterogeneity among EVs regarding their fast-charging capabilities. Fast charging, typically utilized at motorway service stations, requires delivering different power levels depending on the vehicle model. Table 1 highlights the variability in maximum charging power across a selection of popular commercial EVs, underscoring the need for adaptive charging infrastructure, as also shown in Figure 1. This diversity introduces potential inefficiencies: if a high-power-capable vehicle is connected to a low-power outlet, charging is suboptimal. Conversely, connecting a low-power-capable EV to a high-power charger does not improve the charging time and may even accelerate battery degradation. Moreover, EVs exhibit non-linear charging profiles, especially under fast-charging conditions. While charging is often limited to a SOC range between 20% and 80% to avoid excessive battery wear, the power acceptance of the battery is not constant throughout this interval. Typically, power remains high in the mid-SOC range but tapers off significantly as SOC approaches 80%, due to battery management strategies designed to extend battery life and limit thermal stress. This variability demands real-time, dynamic power distribution strategies within charging stations to ensure efficient use of resources. Rather than viewing this variability as a limitation, this paper proposes a system that controls the dynamic nature of EV charging profiles. By continuously adapting the power supplied to each charging point based on the instantaneous charging demand and battery acceptance profile, it is possible to reduce average charging times while also minimizing unnecessary battery stress. Indeed, traditional charging stations often feature a fixed number of charging points delivering uniform distributed power levels. However, this static approach can lead to considerable inefficiencies.

Table 1.
Some EV models and corresponding charging characteristics.
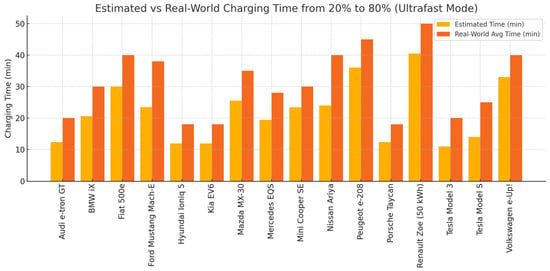
Figure 1.
Estimated charging time for some EVs for SOC 20% to 80%.
Thus, a uniform power distribution among charging points is suboptimal, given the variability in maximum power acceptance across different EVs. To address this issue, this paper explores a modular yet discrete approach to configuring charging points within a station. Specifically, we propose a reconfigurable topology that allows for dynamic adjustment based on real-time demand.
The architecture of the considered charging station is shown in Figure 2. It is assumed that the input DC bus at 900 V is supplied by the medium-voltage (MV) grid through the cascaded connection of a step-down transformer and an active rectifier. The voltage level was chosen to ensure compatibility with the voltage and power requirements of all commercial EVs considered in this study. From this shared DC bus, a set of charging points can be connected.
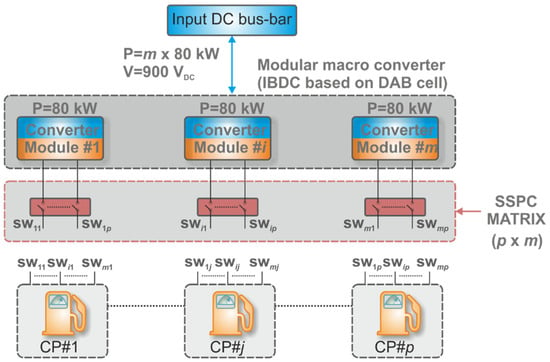
Figure 2.
Charging station converter topology.
The proposed modular converter architecture consists of m converter modules (CMs), each of which is composed of isolated bidirectional DC-DC converters based on DAB circuit configuration. Each CM can provide a maximum total power of 80 kW, and it can be individually connected to each of the p CPs by means of a suitable matrix of solid-state power contactors (SSPCs).
The choice of SSPCs for the switching matrix implementation relies on their enhanced characteristics with respect to mechanical circuit breakers: fast switching capability to achieve rapid and precise circuit interruption, also eliminating electrical arcs and reducing contact wear; bidirectionality, if required; integrated protection features (e.g., overcurrent, short-circuit, and thermal), and advanced diagnostics and communication interfaces. Moreover, power semiconductor devices based on wide bandgap (WBG) technology (e.g., SiC or GaN), or other innovative solutions (e.g., B-TRAN technology), can be selected for their higher efficiency (i.e., reduced losses thanks to lower on-state resistance and/or lower on-state voltage drop) and thermal performance. The thermal management design depends on the power/current to be handled—forced air cooling can be primarily considered for currents up to 400 A, while higher currents require liquid cooling and, therefore, lead to an increase in the system weight/volume.
The SSPC switching matrix allows to direct the proper power to each CP, depending on the power request of the EV that is currently using that CP. The switch matrix allows for obtaining an independent DC input for each CP, thus ensuring that the input voltage is compatible with the one of the connected EV battery pack, which depends on the inherent technology and SOC level.
The total number of dual-line switches needed is equal to p × m. These must be properly sized to carry the maximum possible current, which occurs when the connected CM delivers its maximum power (i.e., 80 kW) at the minimum output voltage (i.e., the minimum voltage level of the EV battery pack). The maximum power of each CP is equal to 240 kW, which can be achieved by connecting to the CP three CMs.
This dynamic configuration allows real-time power target distribution when vehicles reach charging points or even during the charging process itself. For instance, in scenarios where the number of EVs currently charging is lower than the number of available CPs, the total available power can be flexibly distributed to closely match the optimal charging profiles of each individual vehicle. This enables the system to maximize the efficiency of the charging process while aligning with the power acceptance characteristics of the batteries.
A similar approach applies when all charging points are engaged by EVs exhibiting diverse charging profiles, typically characterized by different maximum charging power limits and discrete power acceptance curves. In such cases, dynamic power reallocation can still be employed to optimize charging efficiency across the fleet. This involves adjusting the power supplied to each charging point in real time, based on vehicle-specific parameters such as the SOC, battery temperature, and the charging phase. However, it is evident that a perfect match between the supplied power and the instantaneous optimal charging power for each vehicle will not always be achievable. The ideal condition, where each EV receives exactly the maximum power it can accept at every time instant, would result in the theoretical minimum charging time for each vehicle. In practice, due to constraints such as finite station power capacity, different vehicle arrival times, and competing power demands, such an ideal distribution is rarely feasible. Therefore, it becomes necessary to adopt an optimization strategy that balances competing demands.
In this study, the proposed management strategy is designed to minimize the average charging time of all electric vehicles (EVs) present at the charging station at any given time. This objective is achieved by periodically evaluating the system states and vehicle parameters at defined sampling intervals, and by applying optimization criteria, such as minimizing the weighted sum of the remaining charging durations, within the power allocation algorithm.
Mathematically, the optimization problem can be formulated as:
where P(t) is the power allocation vector at time t, N(t) is the number of vehicles currently being charged, and Tc,i(t) is the estimated remaining charging time for the i-th vehicle. This formulation captures the time-varying and heterogeneous nature of the charging demand and provides a basis for implementing adaptive scheduling algorithms that react to system dynamics in real time. To effectively address this inherently multi-objective minimization problem, it is essential to adopt appropriate optimization criteria capable of balancing competing goals—such as minimizing individual vehicle charging times, maximizing infrastructure utilization, and ensuring fair power distribution across all charging points.
In this paper, the proposed strategy for managing charging point allocation is grounded in a multi-objective optimization framework based on Pareto efficiency. The aim is to identify power allocation solutions that offer an optimal trade-off among multiple performance metrics, without arbitrarily prioritizing one over the others. This approach avoids bias in decision-making and provides a set of non-dominated solutions, where no objective can be improved without degrading at least one of the others.
3. Pareto-Based Power Management Method
In the context of multi-port multi-power charging stations, where each charging point can operate at three discrete maximum power levels, 80 kW, 160 kW and 240 kW, the use of Pareto optimization presents a highly effective strategy for minimizing the average charging time across all connected EVs. Each charging point within the MPMP system is capable of reconfiguration via a dynamic switching matrix, which enables flexible allocation and redistribution of power resources based on current demand and system constraints. Therefore, among the conventional power management algorithms, the Pareto optimization framework appears to be the most appropriate solution for the proposed reconfigurable modular CS architecture. Indeed, the Pareto approach allows determining the optimal configuration of power levels among the various charging points in real time. Rather than aiming for a single “best” solution, Pareto optimization identifies a set of non-dominated solutions where any improvement in one objective (e.g., reducing the charging time for a specific vehicle) cannot occur without compromising another (e.g., increasing the charging time for another vehicle). This multi-objective approach is particularly well suited for MPMP systems, where balancing efficiency, fairness, and power availability is critical.
By applying this method, the system continuously evaluates all feasible switch configurations and power allocations, seeking the solution set that yields the lowest possible average charging time across the station. Once the Pareto front is established, a decision-making criterion, such as minimizing the overall queue time or prioritizing high-priority vehicles, can be applied to select the most appropriate configuration.
The Pareto-based minimization function is a scalar function that ranks candidate solutions based on their dominance relation with respect to others in the population. For a given solution x, the function evaluates the degree to which x is dominated by other solutions or dominates them. This evaluation can be expressed as:
where P is the current population of solutions and D(x,y) is a dominance measure, such as binary dominance, crowding distance, or a more continuous metric like dominance depth or hypervolume contribution. The Pareto-based minimization function offers a robust mechanism for solving multi-objective optimization problems by incorporating dominance information directly into the optimization process.
Therefore, with regards to the application considered, the optimization problem was formulated using a Pareto-based minimization function, which considers a vector of objective functions:
where P(t) is the vector of power allocation at time t, and each fk represents a distinctive objective, such as:
- -
- The average remaining charging time of EV at the station,
- -
- The standard deviation of power distribution,
- -
- The difference between requested and allocated power in order to minimize the mismatch from requested optimal profile.
The optimization seeks to find power allocation vectors P*(t) such that:
where P denotes the Pareto front, the set of all non-dominated solutions.
By employing a Pareto-front-based approach, the system can dynamically choose an optimal power distribution that reflects the current charging station conditions, the state-of-charge of connected EVs, their power acceptance characteristics, and operational constraints, such as total available power or thermal limitations of the infrastructure.
To ensure a balanced charging experience among all connected EVs, the selection of the optimal solution from the Pareto front is guided by a fairness criterion based on the standard deviation of charging times. Specifically, among the non-dominated solutions forming the Pareto front, the final selected power allocation vector P*(t) must satisfy the following condition: the standard deviation of the individual remaining charging times must not exceed ±5% of the average remaining charging time across all EVs currently being charged.
Formally, let:
- -
- be the estimated remaining charging time for vehicle i at time t,
- -
- be the average remaing charging time,
- -
- be the standard deviation.
The selection criterion becomes:
Only those Pareto-optimal solutions that meet this constraint are considered eligible. Among these, the final choice may be refined based on secondary objectives, such as minimal cumulative battery stress or minimal deviation from vehicle-specific optimal charging profiles. This criterion ensures that no individual EV is penalized, promoting fairness and user satisfaction while still leveraging the benefits of dynamic power allocation.
4. Simulation Results
To validate the effectiveness of the proposed Pareto-based power management strategy, a series of simulations were conducted using a MATLAB/Simulink (R2024a) environment. The simulation model replicates the behavior of a reconfigurable MPMP charging station, incorporating the modular architecture described in Section 2. The system consists of eight converter modules and eight charging points, where each CM is capable of delivering up to 80 kW. All the simulations have been performed with reference to a fixed number of electric vehicles (six), which start the charging process simultaneously. Battery capacities and SOC levels were vehicle specific, while maximum charging power was set to 2C for all the vehicles. All the vehicles were characterized by multi-step charging profiles that constrained the acceptable C-rate to decreasing levels as the SOC increased. A vehicle was considered fully charged when the correspondent SOC exceeded 80%.
Firstly, a simulation was carried out with reference to the vehicle set of Table 2 in order to highlight how the proposed approach allocated the CPs’ available power. The Pareto front was updated at a fixed rate based on the chosen charging process observation time TO. TO was set to 2 min. Lower values of TO would allow for the optimization to perform more effectively but, on the other side, would significantly burden the simulation. The Pareto front at the start of the simulation is reported in Figure 3. The font links the average charging time (horizontal axis) and the normalized standard deviation with respect to the corresponding average charging time (vertical axis). While charging time varied between around 33 and 45 min, the standard deviation varied between around 32% and 1%. By selecting the solution that exhibited a standard deviation of 5%, an average charging time of around 42 min was predicted. It should be noted that the Pareto front was rebuilt as the charging process proceeded. This led to a finalized charging time that could be significantly different from the initial predicted one. The distributions of the charging powers’ allocations corresponding to the Pareto front of Figure 3 are reported in Figure 4. As expected, as the average charging time increased (which corresponded to a decrease in the standard deviations), charging powers decreased at different rates to minimize differences between the charging times of the vehicles set.
Table 2.
Characteristics and SOC at the initial time of the EVs used to simulate the first considered charging scenario.
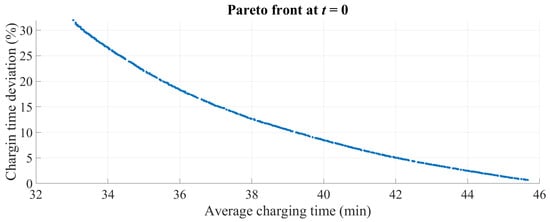
Figure 3.
Pareto front on average charging time and charging time standard deviations.
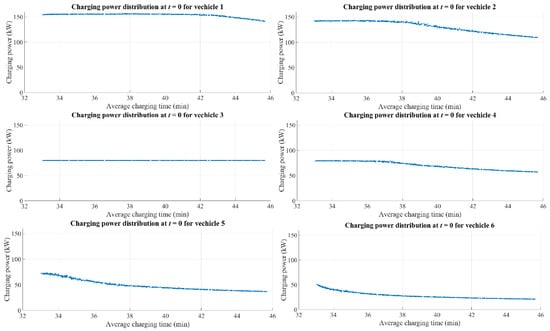
Figure 4.
Charging powers’ allocations on the Pareto front.
Time behaviors of the charging powers and of the batteries’ SOC in the whole process are reported, respectively, in Figure 5 and Figure 6. Figure 5 highlights how the Pareto approach and the vehicles’ power profiles acted simultaneously to limit the charging power reserved to each vehicle. In particular, vehicle 1 was charged initially at 160 kW in order to allocate an acceptable charging power to the other vehicles. The charging power of vehicle 1 was ramped up to 240 kW only after vehicles 5 and 6 had completed their charging process. Then, it was ramped down to lower levels as the power profile capped the charging power.
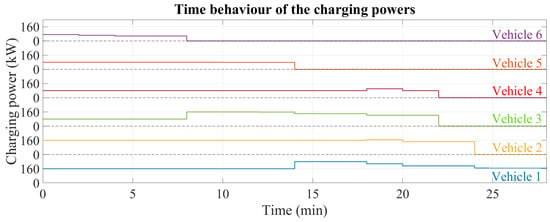
Figure 5.
Vehicles’ charging powers.
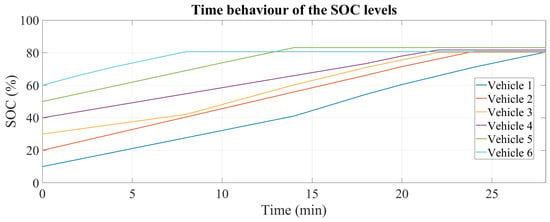
Figure 6.
Vehicle SOC levels.
A second set of simulations was implemented to benchmark the proposed method against a first-come first-served (FCFS) strategy. For each strategy, 100,000 simulations were performed with randomized vehicle sets. Each set was based on six vehicles, with SOC levels randomized in the range 10–60% and batteries capacities randomized in the range 40–120 kW. In each simulation, the performance of the strategy was evaluated by computing for each vehicle the difference between the resulting charging time and the ideal one that would be achieved through a virtual charging point able to supply the maximum charging power compatible with the vehicle profile.
The charging time differences were then synthetized with their average and charging deviation values normalized with respect to the ideal average charging time. Figure 7 and Figure 8 report the distributions of the two performance indexes for the Pareto strategy. The corresponding distributions obtained for the FCFS strategy are shown in Figure 9 and Figure 10. It can be deduced that the Pareto strategy was able to significantly reduce the expected charging time since it shifted the peak of both the distributions to lower values. In particular, if 90% of the population was considered, the PO strategy gave an average charging time error under 54% and a charging time deviation error under 45%, versus 57% and 63% obtained, respectively, by the FCFS strategy.
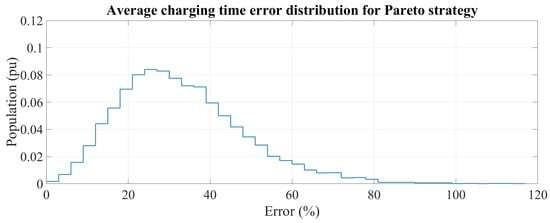
Figure 7.
Distribution of the average charging time error for the Pareto strategy.
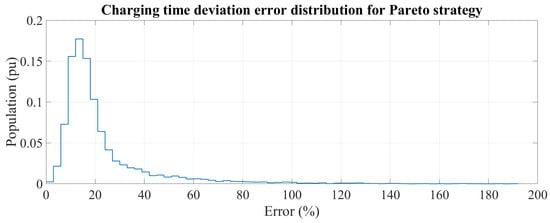
Figure 8.
Distribution of the charging time deviation error for the Pareto strategy.
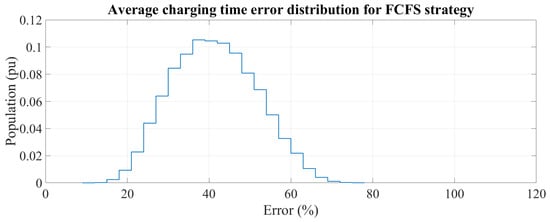
Figure 9.
Distribution of the average charging time error for the FCFS strategy.
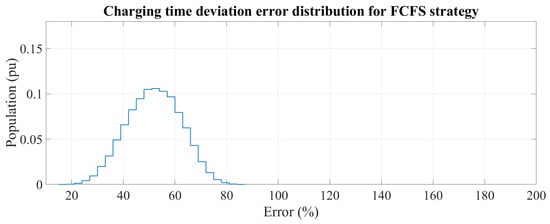
Figure 10.
Distribution of the charging time deviation error for the FCFS strategy.
5. Conclusions
This paper introduced a novel power management method for multi-point multi-power (MPMP) electric vehicle charging stations based on Pareto optimization. The proposed framework leveraged a reconfigurable modular topology, employing dual-active-bridge (DAB) converters and a dynamic switching matrix to flexibly allocate power across charging points operating at discrete levels. By incorporating a multi-objective optimization approach, the system dynamically balanced several competing goals: minimizing average charging time, ensuring fair resource distribution, minimizing power mismatch with battery acceptance profiles, and reducing battery stress.
The simulation results strongly validated the effectiveness of the proposed Pareto-based optimization strategy for power management in modular, reconfigurable MPMP charging infrastructures. Unlike traditional static allocation methods, the dynamic and multi-objective approach adopted in this work enabled significant improvements in charging performance by intelligently distributing available power among multiple charging points.
The results demonstrated that even under constrained conditions, such as a fixed 80 kW per converter module, the system achieved an optimized average charging time of 42.5 min with minimal deviation across vehicles. This represented a significant improvement over the baseline strategy, which resulted in an average charging time of 46.8 min under constant charging power conditions.
The benefits became even more pronounced when the time-varying nature of battery charging behavior was taken into account, and the optimization process was applied iteratively at a sampling interval of 2 min. Through adaptive reallocation of power resources in response to real-time vehicle demands and battery characteristics, the system achieved a substantial reduction in charging time, bringing all vehicles to at least 80% SOC in just 29.4 min. This corresponded to a performance gain of over 30% compared to conventional strategies.
These findings confirmed the suitability of the proposed Pareto-based method for real-world applications, particularly in scenarios involving multiple EVs with heterogeneous charging requirements. Furthermore, the modularity of the charging infrastructure and the scalability of the algorithm make this solution highly adaptable to future high-demand charging stations. The approach not only enhanced efficiency but also contributed to extending battery life by respecting dynamic charging profiles, thus aligning technical performance with long-term sustainability.
Author Contributions
Conceptualization, A.D. and M.C.; methodology, A.D. and I.S.; software, G.B.; validation, A.D., M.C., and I.S.; formal analysis, A.D.; investigation, G.B. and I.S.; resources, M.C.; data curation, A.D.; writing—original draft preparation, A.D. and M.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by Spoke 13—Flagship 2024—LINE B—2° Edition High Integrated Hybrid Smart Plug and was funded by the European Union Next-Generation EU (Piano Nazionale di Ripresa e Resilienza (PNRR)–Missione 4 Componente 2, Investimento 1.4–D.D. 1033 17/06/2022, CN00000023). This manuscript reflects only the authors’ views and opinions—neither the European Union nor the European Commission can be considered responsible for them.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Acharige, S.S.G.; Haque, E.; Arif, M.T.; Hosseinzadeh, N.; Hasan, K.N.; Oo, A.M.T. Review of Electric Vehicle Charging Technologies, Standards, Architectures, and Converter Configurations. IEEE Access 2023, 11, 41218–41255. [Google Scholar] [CrossRef]
- Cheng, X.; Tao, X.; Chen, J.; Chen, Y.; Yang, R.; Pei, X.; Wu, H.; Zhao, X. A Reconfigurable Charging Stack with DC-DC Modules Flexibly Allocated for Electric Vehicle Charging Stations. In Proceedings of the 2024 9th Asia Conference on Power and Electrical Engineering (ACPEE), Shanghai, China, 11–13 April 2024; pp. 2653–2658. [Google Scholar]
- Aoun, A.; Adda, M.; Ilinca, A.; Ghandour, M.; Ibrahim, H. Dynamic Charging Optimization Algorithm for Electric Vehicles to Mitigate Grid Power Peaks. World Electr. Veh. J. 2024, 15, 324. [Google Scholar] [CrossRef]
- Chen, C.; Shang, F.; Salameh, M.; Krishnamurthy, M. Challenges and Advancements in Fast Charging Solutions for EVs: A Technological Review. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 695–701. [Google Scholar]
- Pandzic, H.; Bobanac, V. An Accurate Charging Model of Battery Energy Storage. IEEE Trans. Power Syst. 2019, 34, 1416–1426. [Google Scholar] [CrossRef]
- Dannier, A.; Ferraro, L.; Miceli, R.; Piegari, L.; Rizzo, R. Numerical and experimental validation of a LiFePO4 battery model at steady state and transient operations. In Proceedings of the 2013 Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–6. [Google Scholar]
- Shen, W.; Vo, T.T.; Kapoor, A. Charging algorithms of lithium-ion batteries: An overview. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 1567–1572. [Google Scholar]
- Jiang, J.; Liu, Q.; Zhang, C.; Zhang, W. Evaluation of Acceptable Charging Current of Power Li-Ion Batteries Based on Polarization Characteristics. IEEE Trans. Ind. Electron. 2014, 61, 6844–6851. [Google Scholar] [CrossRef]
- Moghaddam, Z.; Ahmad, I.; Habibi, D.; Phung, Q.V. Smart Charging Strategy for Electric Vehicle Charging Stations. IEEE Trans. Transp. Electrif. 2018, 4, 76–88. [Google Scholar] [CrossRef]
- Saner, C.B.; Saha, J.; Srinivasan, D. A Charge Curve and Battery Management System Aware Optimal Charging Scheduling Framework for Electric Vehicle Fast Charging Stations with Heterogeneous Customer Mix. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14890–14902. [Google Scholar] [CrossRef]
- Buckreus, R.; Aksu, R.; Kisacikoglu, M.; Yavuz, M.; Balasubramanian, B. Optimization of Multiport DC Fast Charging Stations Operating with Power Cap Policy. IEEE Trans. Transp. Electrif. 2021, 7, 2402–2413. [Google Scholar] [CrossRef]
- Ahmad, A.; Qin, Z.; Wijekoon, T.; Bauer, P. An Overview on Medium Voltage Grid Integration of Ultra-Fast Charging Stations: Current Status and Future Trends. IEEE Open J. Ind. Electron. Soc. 2022, 3, 420–447. [Google Scholar] [CrossRef]
- Shao, S.; Chen, L.; Shan, Z.; Gao, F.; Chen, H.; Sha, D.; Dragičević, T. Modeling and Advanced Control of Dual-Active-Bridge DC–DC Converters: A Review. IEEE Trans. Power Electron. 2022, 37, 1524–1547. [Google Scholar] [CrossRef]
- Rana, M.M.; Alam, S.M.M.; Rafi, F.A.; Deb, S.B.; Agili, B.; He, M.; Ali, M.H. Comprehensive Review on the Charging Technologies of Electric Vehicles (EV) and Their Impact on Power Grid. IEEE Access 2025, 13, 35124–35156. [Google Scholar] [CrossRef]
- Varghese, S.S.; Ali, S.Q.; Joos, G. Energy Management of Fast Charging and Ultra-Fast Charging Stations with Distributed Energy Resources. IEEE Access 2024, 12, 131638–131655. [Google Scholar] [CrossRef]
- Rubino, L.; Rubino, G.; Esempio, R. Linear Programming-Based Power Management for a Multi-Feeder Ultra-Fast DC Charging Station. Energies 2023, 16, 1213. [Google Scholar] [CrossRef]
- Hassler, J.; Dimitrova, Z.; Petit, M.; Dessante, P. Optimization and Coordination of Electric Vehicle Charging Process for Long-Distance Trips. Energies 2021, 14, 4054. [Google Scholar] [CrossRef]
- Ghaemi, A.; Farrokhi, M.; Mokhtari, H. Model predictive control for optimal power management in EV charging stations. IEEE Trans. Ind. Electron. 2022, 69, 657–666. [Google Scholar]
- Wang, F.; Xu, Z.; Wang, Y. Artificial intelligence-based optimization for smart charging of electric vehicles: A review. Renew. Sustain. Energy Rev. 2020, 133, 110301. [Google Scholar]
- Rezaei, M.; Firuzabad, M.F. Fuzzy logic-based decision making for energy management in EV fast-charging stations. Energy 2020, 192, 116651. [Google Scholar]
- Liu, D.; Wu, H.; Liu, X. Hierarchical power management strategy for EV charging stations with renewable energy and energy storage. Appl. Energy 2020, 261, 114360. [Google Scholar]
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in vehicles and renewable energy sources for cost and emission reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Xu, C.; Yang, W.; Ma, G.; Che, S.; Li, Y.; Jia, Y.; Chen, N.; Huang, G.; Li, Y. Edge-Nitrogen Enriched Porous Carbon Nanosheets Anodes with Enlarged Interlayer Distance for Fast Charging Sodium-Ion Batteries. Small 2022, 18, 2204375. [Google Scholar] [CrossRef]
- Xu, C.; Chen, K.; Yang, J.; Ma, G.; Wang, Y.; Zhou, Z.; Wu, Z.; Che, S.; Li, Z.; Tu, Y.; et al. Synergistic effect of holey graphene and CoSe2-NiSe2 heterostructure to enhance fast Na-ion transport. Chem. Eng. J. 2024, 498, 155353. [Google Scholar] [CrossRef]
- Xu, C.; Yang, J.; Chen, K.; Ma, G.; Wang, Y.; Li, Z.; Zhou, Z.; Wu, Z.; Che, S.; Ding, C.; et al. CoSe2-Modified multidimensional porous carbon frameworks as high-Performance anode for fast-Charging sodium-Ion batteries. Chem. Eng. J. 2024, 497, 154875. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).