

Low Voltage Ride Through Coordination Control Strategy of DFIG with Series Grid Side Converter


Abstract
1. Introduction
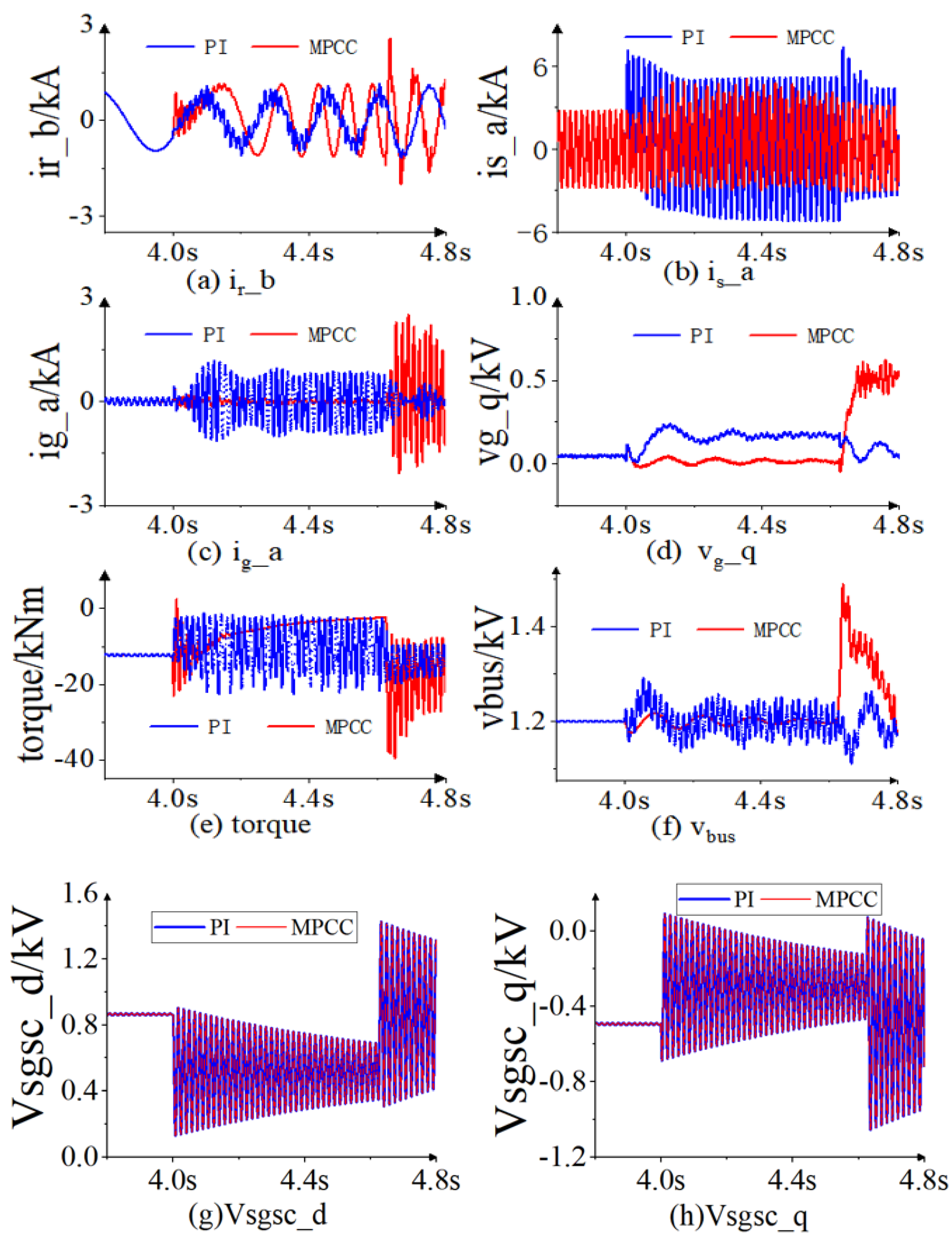
- A voltage ride-through strategy is developed through coordinated control of the SGSC and RSC, where regulation of the SGSC output voltage suppresses the stator flux transient component, and the MPCC strategy enables the RSC to directly track the rotor current, effectively mitigating overcurrent issues. For example, in a single-phase ground fault, the stator current fluctuation range under traditional PI control is −7.14 to 7.14 kA, whereas the improved coordinated control reduces it to −4.3 to 4.3 kA, a reduction of about 40%;
- This paper also introduces the T/4 delayed voltage separation control strategy applied to SGSC for positive and negative sequence component separation under both steady-state and fault conditions. Equation (12) shows how to achieve voltage positive and negative sequence separation, thereby avoiding the time delay problem of the traditional PI controller. Simulation results indicate that this strategy can limit the DC-link voltage fluctuation range between 1.17 and 1.22 kV during a single-phase short circuit fault, significantly improving system stability compared to traditional PI control.
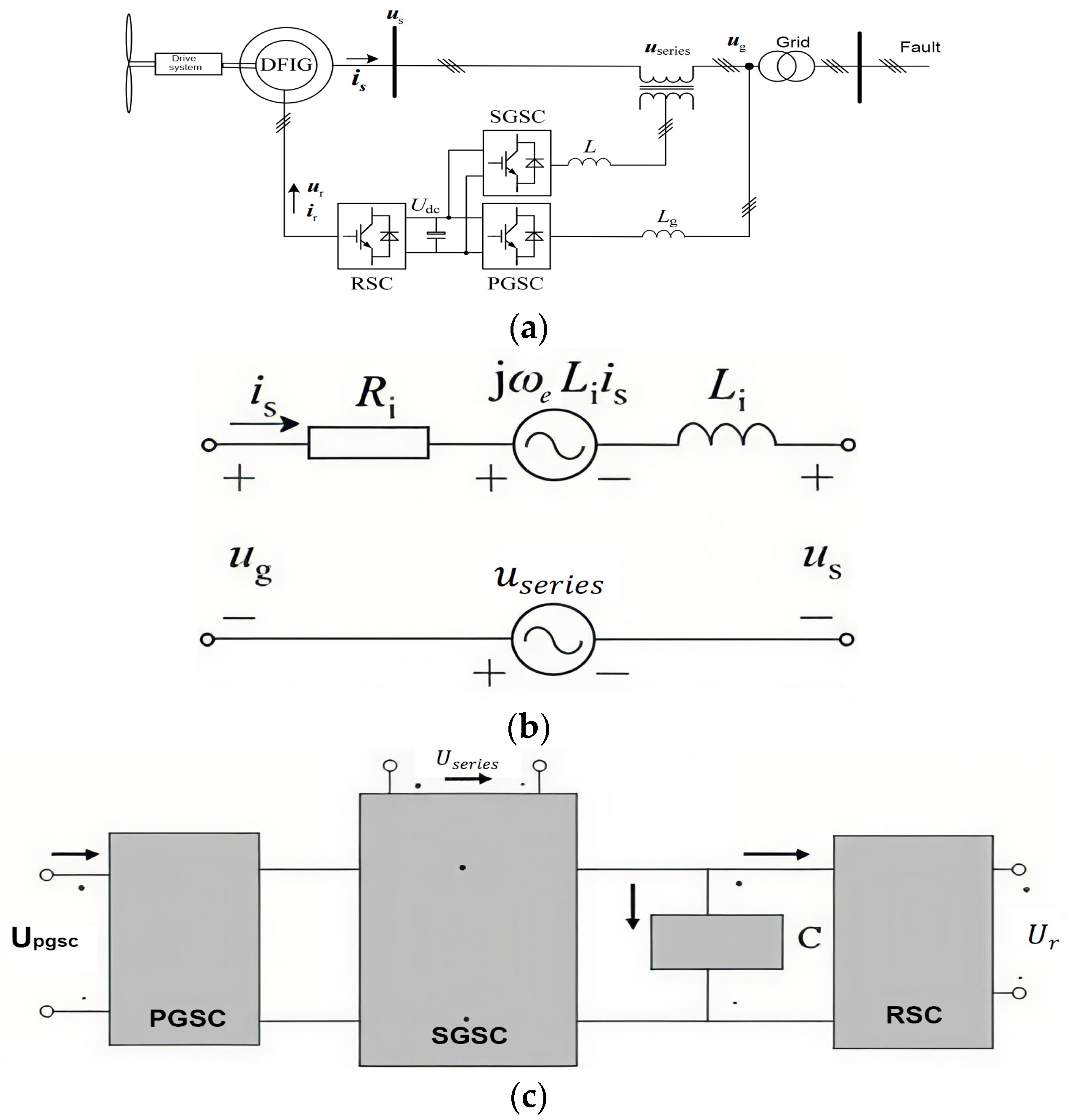
2. The DFIG Model with SGSC
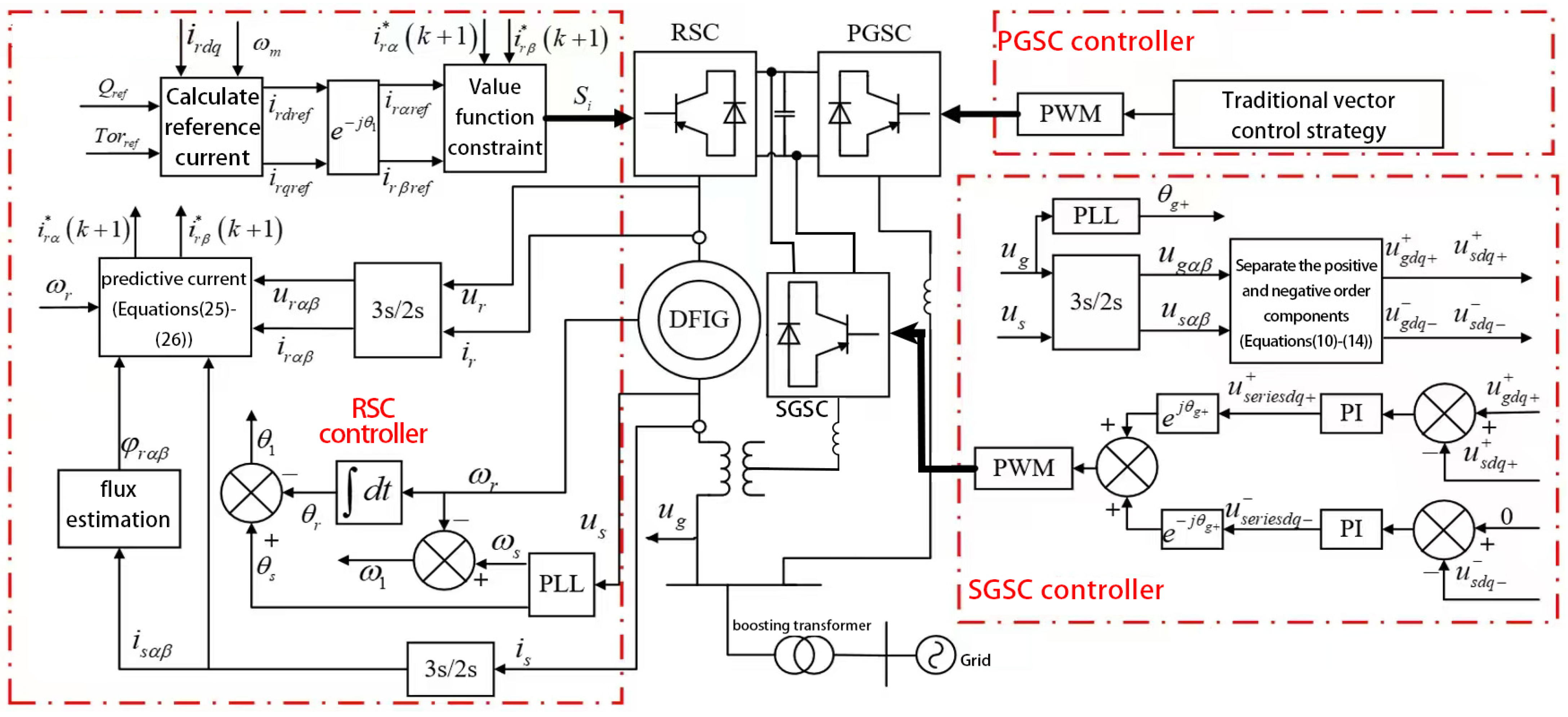
3. Coordinated Control of Voltage Ride Through Based on SGSC and RSC
3.1. Improved Control of SGSC During Grid Steady State and Fault
3.2. MPCC Strategy Applied to RSC During Grid Failure
3.2.1. Building a Predictive Model
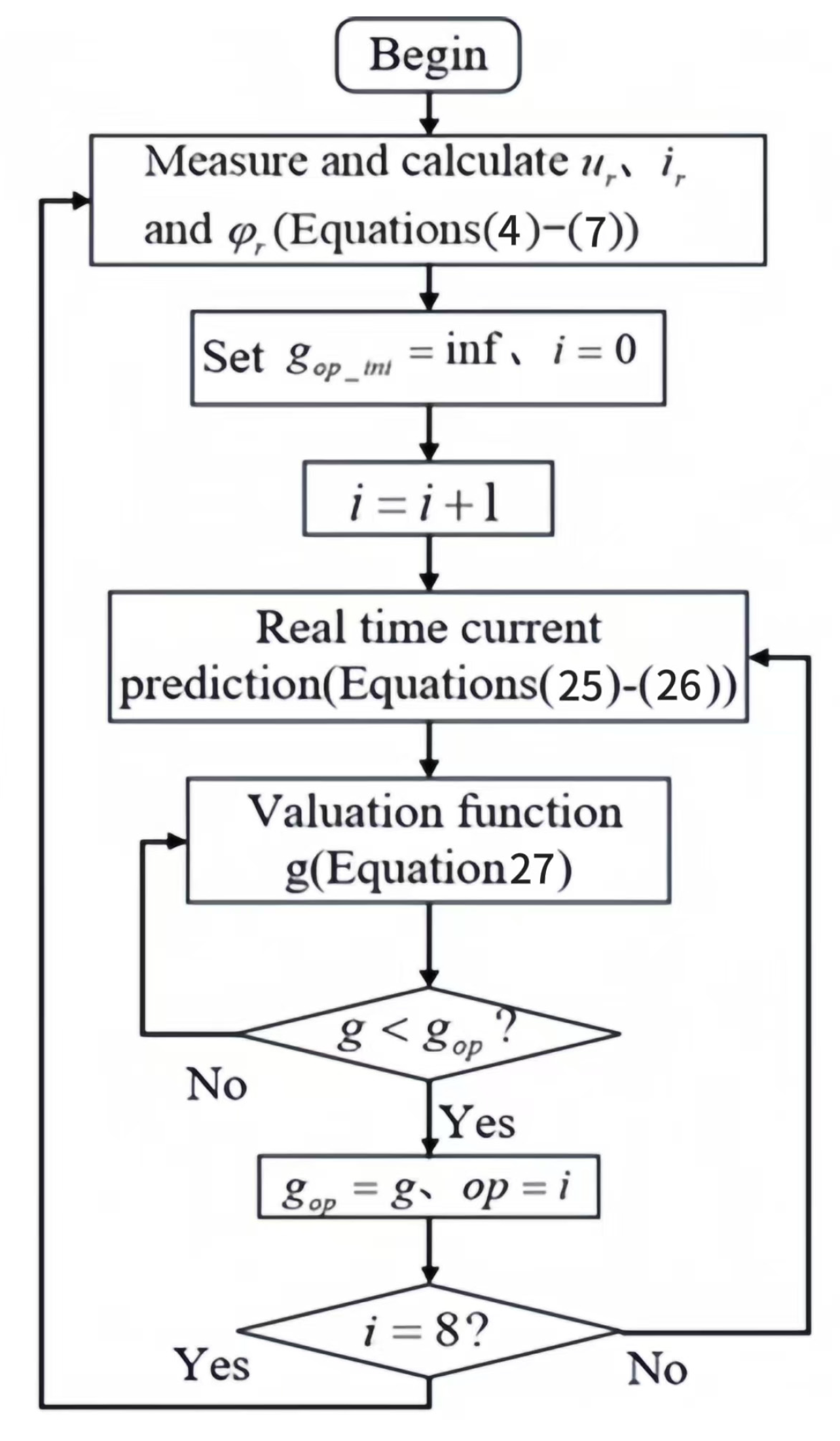
3.2.2. Current Predictive Control Algorithm
3.2.3. The Establishment of the Value Function
4. Simulation Verification
5. Conclusions
- Three-phase symmetrical fault: In a three-phase short-circuit fault, when the grid voltage drops to 60%, the q-axis grid-side voltage under traditional PI control reaches its peak value of 0.25 kV after 0.125 s, while the improved coordinated control stabilizes it around 0.023 kV. Additionally, the improved coordinated control reduces the electromagnetic torque fluctuation range from −0.8 to 21.6 kNm to a near-stable value. The bus voltage fluctuation range is also reduced from 1.14–1.29 kV to 1.17–1.21 kV;
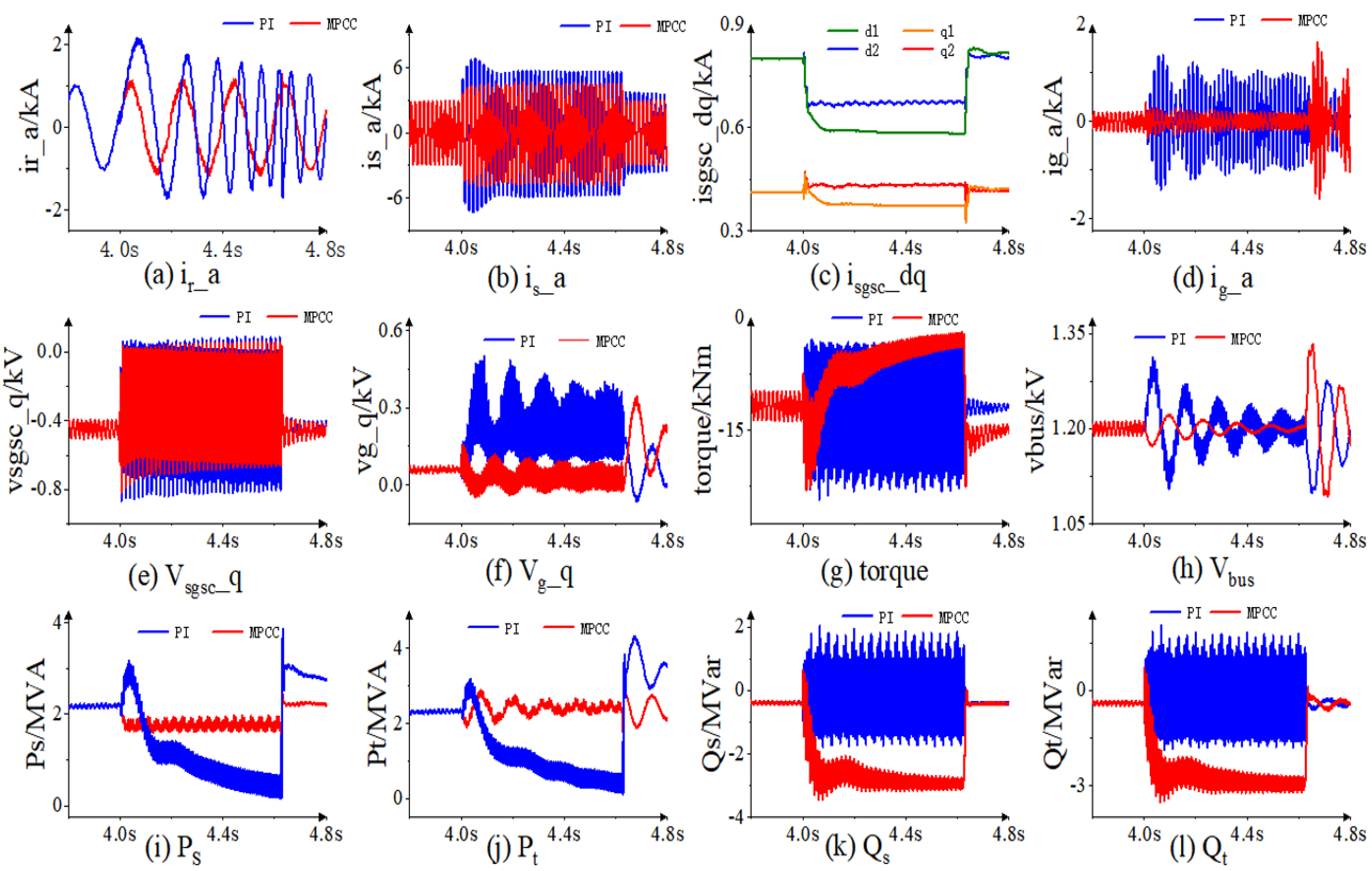
- Single-phase grounding fault: For single-phase grounding faults, the comparison between traditional PI control and the improved coordinated control demonstrates clear performance differences. For example, in the case of a single-phase short-circuit fault, the stator current fluctuation range under traditional PI control is from −7.14 kA to 7.14 kA, while the improved coordinated control based on SGSC and RSC reduces this range to −4.3 kA to 4.3 kA, representing a reduction of approximately 40%. Furthermore, the improved coordinated control increases the minimum electromagnetic torque from −23.4 kNm to −22.1 kNm and quickly suppresses it to a relatively stable level;
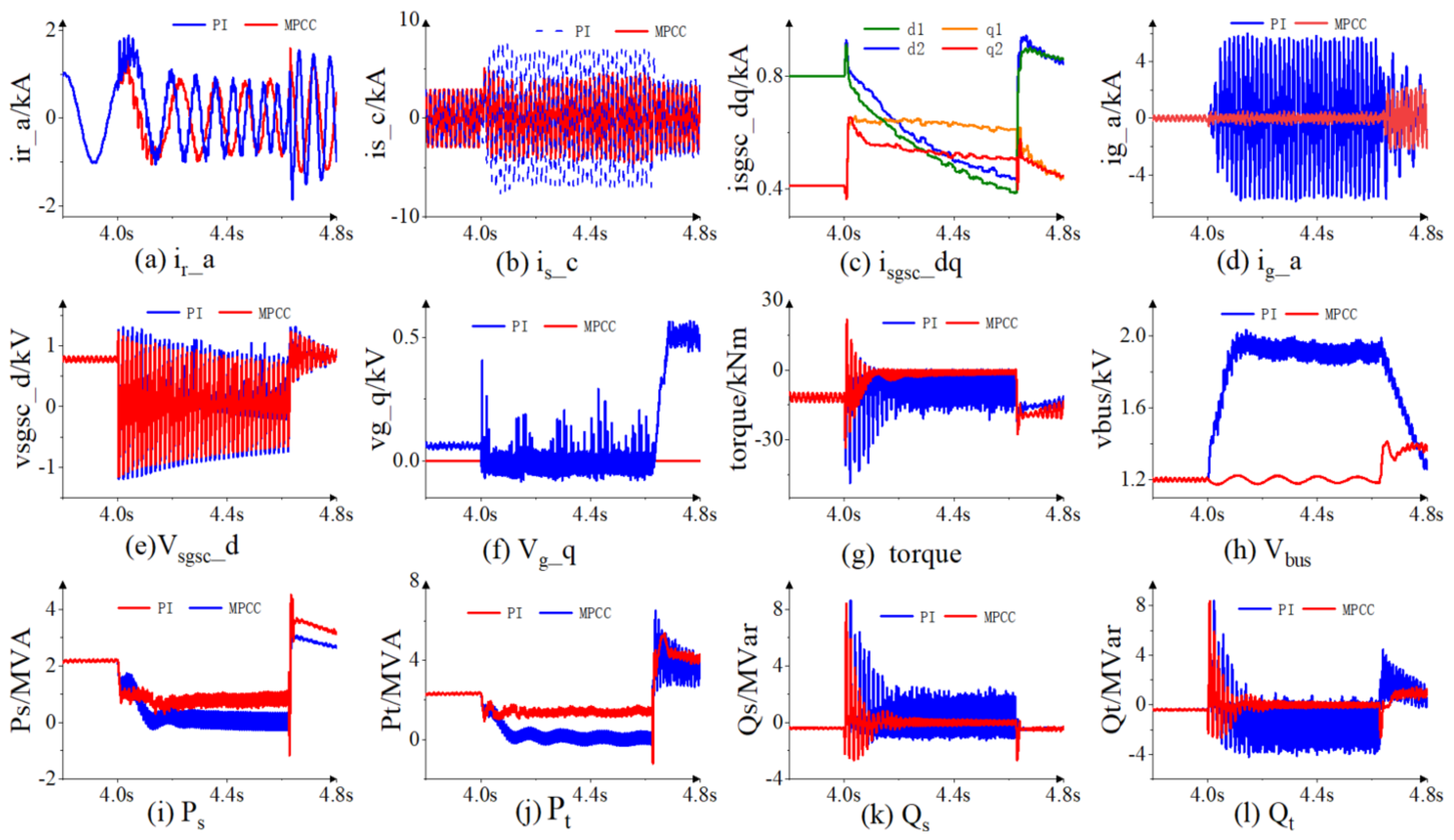
- Two-phase short-circuit fault: For a two-phase short-circuit fault, the improved coordinated control exhibits superior performance. For instance, in a two-phase short-circuit fault, the DC-link voltage under traditional PI control peaks at 2.03 kV after 0.143 s, while the improved coordinated control limits it to between 1.17 kV and 1.26 kV. Additionally, the improved coordinated control ensures that the reactive power stabilizes after 0.21 s, with the fluctuation range being only −0.4 MVar to 0.38 MVar. The quantitative analysis demonstrates that the improved coordinated control strategy significantly enhances system stability and response speed under various fault conditions, providing more reliable low-voltage ride-through capability for DFIG wind energy systems during grid faults.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cheng, Q.M.; Wang, Y.J.; Cheng, Y.M.; Wei, L.; Shen, L. Coordinated control strategy of DFIG wind power system based on SGSC and PBC under unbalanced grid voltage. Acta Energiae Solaris Sin. 2021, 42, 351–358. [Google Scholar]
- Cheng, Q.M.; Wei, L.; Cheng, Y.M.; Wei, L.; Wang, Y.J. Coordinated control of DFIG Based on SGSC and lyapunov controller in unbalanced power grid. Electr. Mach. Control 2020, 24, 27–37. [Google Scholar]
- Suppioni, V.P.; Grilo, A.P.; Teixeira, J.C. Improving network voltage unbalance levels by controlling DFIG wind turbine using a dynamic voltage restorer. Int. J. Electr. Power Energy Syst. 2018, 96, 185–193. [Google Scholar] [CrossRef]
- Suppioni, V.P.; Grilo, A.P.; Teixeira, J.C. Control methodology for compensation of grid voltage unbalance using a series-converter scheme for the DFIG. Electr. Power Syst. Res. 2016, 133, 198–208. [Google Scholar] [CrossRef]
- Yao, J.; Li, H.; Chen, Z. Enhanced control of a DFIG-Based wind-power generation system with series grid-side converter under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2013, 28, 3167–3181. [Google Scholar] [CrossRef]
- Kang, Y.L.; Zheng, T.T.; Miao, S.H.; Liu, Z.W.; Liu, Y.L. Coordinated control strategy of series and parallel networked side converters for DFIG system under unbalanced grid voltage. Trans. Electr. Technol. 2018, 33, 193–204. [Google Scholar]
- Hiremath, R.; Moger, T. Grid-Connected DFIG Driven Wind System for Low Voltage Ride Through Enhancement using Neural Predictive Controller. J. Inst. Eng. India Ser. 2022, 103, 1577–1588. [Google Scholar] [CrossRef]
- Petersson, A. Analysis, modeling and control of doubly-fed induction generators for wind turbines. Doctoral Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2005. [Google Scholar]
- Flannery, P.S.; Venkataramanan, G. A grid fault tolerant doubly fed induction generator wind turbine via series connected grid side converter. arXiv 2022, arXiv:2201.08879. [Google Scholar]
- Omar, S.; Helal, A.; Elarabawy, I. Stator voltage sensorless DFIG with low voltage ride-through capability using series and parallel grid side converters. In Proceedings of the 2016 7th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 22–24 March 2016. [Google Scholar]
- Jahanbakhsh, B.; Xu, D. Improved low voltage ride through capability of doubly fed induction generator using series grid side converter. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012. [Google Scholar]
- Morari, M.; Lee, J.H. Model predictive control: Past, present and future. Comput. Chem. Eng. 1999, 23, 667–683. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electr. 2000, 56, 1826–1838. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, H.; Chen, Y. Research on Control Strategy of Solid State Transformer Based on Improved MPC Method. IEEE Access 2023, 11, 9431–9440. [Google Scholar] [CrossRef]
- Ding, C.; Chen, Y.; Nie, T. LVRT Control Strategy for Asymmetric Faults of DFIG Based on Improved MPCC Method. IEEE Access 2021, 9, 165207–165218. [Google Scholar] [CrossRef]
- Hu, S.J.; Meng, Y.F.; Li, F.L. AC voltage sensorless Control strategy of grid-connected inverter under unbalanced grid voltage. Trans. China Electrotech. Soc. 2017, 32, 146–152. [Google Scholar]
- Yao, J.; Liao, Y.; Li, H. Coordinated control of a doubly fed induction generator wind turbine with series grid-side converter under unbalanced grid voltage conditions. Electr. Mach. Control 2010, 14, 8. [Google Scholar]
- Liu, R.Z.; Chen, Z.; Tang, W.B. Control strategy of an LCL grid-connected Inverter with the influence of a phase-locked loop under a weak power grid. Power Syst. Prot. Control 2022, 50, 10. [Google Scholar]
- Makrini, A.E.; Karkri, Y.E.; Boukhriss, Y.; Markhi, H.E.; Moussaoui, H.E. LVRT Control Strategy of DFIG based Wind Turbines Combining Passive and Active Protection. Int. J. Renew. Energy Res. 2017, 7, 1258–1269. [Google Scholar]
- Li, B.; Zheng, D.; Li, B. Analysis of low voltage ride-through capability and optimal control strategy of doubly-fed wind farms under symmetrical fault. Prot. Control Mod. Power Syst. 2023, 8, 1–15. [Google Scholar] [CrossRef]
- Li, B.T.; Zheng, D.C.; Li, B.; Ji, L.; Hong, Q.T.; Meng, Q.L. Research on low voltage ride-through strategies for doubly-fed wind farms during asymmetric faults. Int. J. Electr. Power Energy Syst. 2024, 160, 110138. [Google Scholar]
- Cheng, X.K.; Sun, X.D.; Chai, J.Y.; Liu, H.; Song, P. Virtual synchronous control strategy for doubly-fed induction generator under asymmetrical gris faults. Autom. Electr. Power Syst. 2018, 42, 120–126. [Google Scholar]
- Lin, R.X.; Ma, X.Y.; Chang, X.Q.; Xu, L.; Ding, L.J.; Yang, H.G. Analysis of DFIG rotor current considering chopper protection under asymmetrical grid voltage sags. Proc. CSU-EPSA 2019, 31, 106–117. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sa | Sb | Sc | Voltage Vector V |
|---|---|---|---|
| 0 | 0 | 0 | |
| 1 | 0 | 0 | |
| 1 | 1 | 0 | |
| 0 | 1 | 0 | |
| 0 | 1 | 1 | |
| 0 | 0 | 1 | |
| 1 | 0 | 1 | |
| 1 | 1 | 1 |
| Parameter | Numerical Value |
|---|---|
| Stator and rotor mutual inductance (mH) | 2.5 |
| Rotor leakage inductance (mH) | 0.087 |
| Stator leakage inductance (mH) | 0.087 |
| DC bus voltage reference value (kV) | 1.2 |
| Rated Capacity (MW) | 2 |
| Rated voltage (kV) | 0.69 |
| Stator resistance (mΩ) | 2.6 |
| Rotor resistance (mΩ) | 2.9 |
| SGSC series transformer ratio | 2:1 |
| Capacity of the SGSC (MW) | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, X.; Ding, C.; Zhang, J.; Wang, Q.; Chen, W. Low Voltage Ride Through Coordination Control Strategy of DFIG with Series Grid Side Converter. Energies 2025, 18, 2537. https://doi.org/10.3390/en18102537
Qi X, Ding C, Zhang J, Wang Q, Chen W. Low Voltage Ride Through Coordination Control Strategy of DFIG with Series Grid Side Converter. Energies. 2025; 18(10):2537. https://doi.org/10.3390/en18102537
Chicago/Turabian StyleQi, Xin, Can Ding, Jun Zhang, Quan Wang, and Wenhui Chen. 2025. "Low Voltage Ride Through Coordination Control Strategy of DFIG with Series Grid Side Converter" Energies 18, no. 10: 2537. https://doi.org/10.3390/en18102537
APA StyleQi, X., Ding, C., Zhang, J., Wang, Q., & Chen, W. (2025). Low Voltage Ride Through Coordination Control Strategy of DFIG with Series Grid Side Converter. Energies, 18(10), 2537. https://doi.org/10.3390/en18102537