1. Introduction
Increasing the efficiency of technical applications is currently a growing topic of interest as the energy demands of society increase [
1]. In this context, one possible solution is energy harvesting, which allows for the creation of self-powered systems like wireless sensor systems, which enable new functions that contribute to improvements in the efficiency of technical applications. With the introduction of electric machines (EMs) into the automotive industry, their requirements must be adapted to the high standards of the automotive industry. The key aspects in this domain are reliability and efficiency. Numerous studies have investigated methods to improve both aspects. These studies are based on sensor data, which measure the physical properties of EMs.
Regarding reliability and the associated failure safety, sensor data are used for condition monitoring. Deviations from the normal state can be detected by monitoring the actual state of the EM, and, with this, critical damage to the machine caused by faults can be prevented. Vaimann et al. [
2] and Meng et al. [
3] indicated that the monitoring of the temperature inside a radial permanent magnet machine is a significant aspect in preventing failure. Regarding the magnets of such an EM, measuring the magnets’ temperature prevents demagnetization and hence a loss of performance up to total failure. The field of predictive maintenance, as presented by Antonio-Daviu [
4] and Lu et al. [
5], shows the necessity for comprehensive sensor data as input for the relevant methods. The additional measuring of the magnetic flux of the EM and the mechanical behavior extends the need for sensors on the rotor. To implement a machine learning-based fault detection method for an electric vehicle powertrain, Dettinger et al. [
6] investigated the use of a digital twin, including an EM. Consequently, sensors have been used as input for fault detection.
Considering efficiency, sensor data lead to a better understanding of the physical behavior and properties of EMs. For example, Baumann et al. [
7] identified the difference between the measurement and simulation of the rotor temperature and showed that measuring the temperature could support the extension of the temperature limit by 10% compared with the implemented calculation, leading to an increase in the operating range for the EM.
While measuring the physical variables of the stator is common practice, there are unique challenges for sensors on the rotor. The main challenges are as follows:
Power supply;
Data transmission.
As the system discussed here is a rotating system, it is essential to minimize its mass. For the power supply, the literature presents several solutions, which can be divided into the following supply categories:
Energy storage (batteries and capacitors) [
8];
Direct power supplies [
9];
Wireless power supplies [
10,
11];
Table 1 gives an overview of the possible sensors, their power consumption, and, according to this, the necessary range of the power output of the chosen supply system.
Regarding rotating systems, energy harvesting (EH) offers advantages compared with the other supply categories. No recharging of the energy storage is needed, and regular maintenance to prevent the failure of direct power transmission devices, like slip rings, due to mechanical wear is not necessary [
16]. The most common solution for a wireless power supply is transmission via electromagnetic induction with coils. In EMs, negative interactions with their electromagnetic field are very likely. Here, EH, especially via a piezoelectric energy harvester (PEH), which Erturk [
17] characterized as an EH device with a high power density compared with other EH applications, circumvents the problem of the negative interaction with the EM. PEHs use the mechanical stress of the rotor shaft, which is a natural byproduct during the operation of EMs.
The purpose of this article is to provide an approach to the application of a PEH on the rotor shaft of an EM. After an introduction to the field of PEHs and the presentation of the investigated PEH system, the essential problems occurring in the design of a PEH are discussed. Enabling the development of a PEH while the EM is still in the early stages of the design process is the target of this approach. Therefore, the gap between the provided and required data for PEH design, as well as a method to close this gap, is discussed. The method includes various simulation models to calculate the needed data as input for the PEH and the PEH system itself. Each model, including a description of the fundamental approaches adopted to deduce the models, is briefly discussed. The design considers the energy provided by the PEH and the operating strategies of the sensor system powered by the PEH. Moreover, feedback on the design of the rotor shaft is given for the optimal operation of the whole system. After the presentation of the method, results from an exemplary implementation case are discussed.
2. Piezoelectric Energy Harvester
PEHs use piezoelectric materials (PM), which convert mechanical stress into an electric charge. By accelerating a seismic mass placed on the PM, the motion of the structure, like vibration, is converted. Therefore, a cantilever beam with one or two PM layers is added to the system, converting the motion into mechanical stress in the beam. This is the most common method of harvesting motion, as reviewed by Daukaev et al. [
18]. Micek et al. [
19] gave an example of the direct inducement of mechanical stress in the PM through the structure at which the PM is placed. They investigated a PM placed on a rotor shaft, inducing mechanical loads via a belt transmission, driving the shaft.
Regardless of the way that the mechanical stress is induced in the PM, it must be an alternating stress to generate a constant electric charge, resulting in an AC voltage generated by a PM. For rotating PEHs, the mechanical stress must alternate in the rotating system.
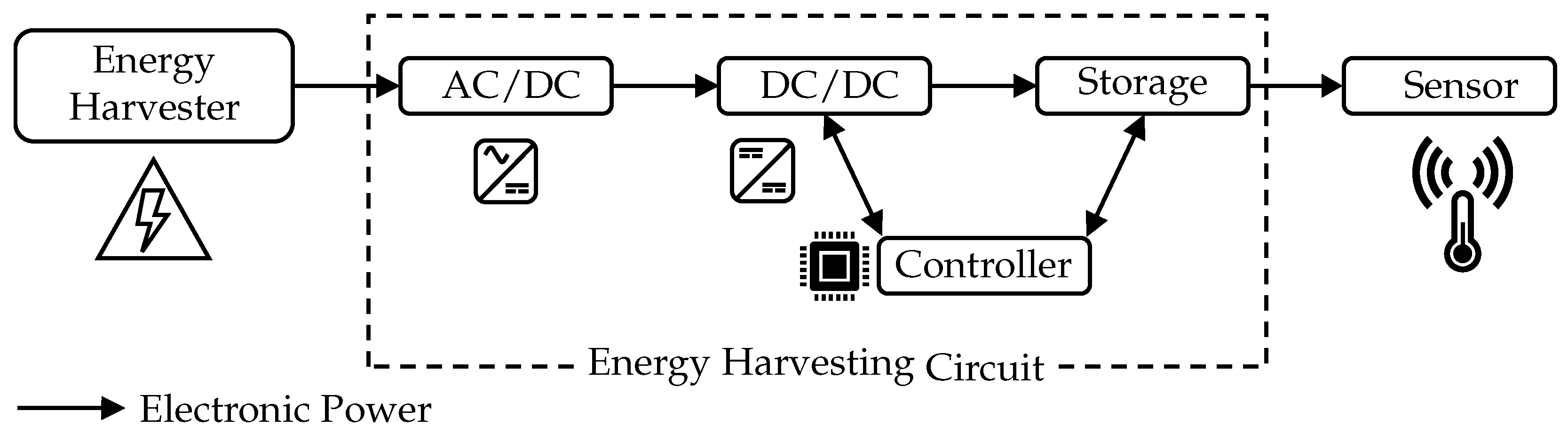
Figure 1 shows a general schematic illustration of an energy harvesting system. In the context of EH to power sensors, the harvester is called a micro-power generator. The system is divided into three parts:
In the case of PEHs, the micro-power generator is the PM, and for applications where the PM is placed on an uneven surface, a macro-fiber composite (MFC) was developed by the National Aeronautics and Space Administration (NASA) in 1996. They combined piezoceramic fibers with resin into a patch. Therefore, the patch is more flexible compared to pure piezoceramics and thus ideal for rotor-sided placement, and it is used as the PM in the presented method. Further, the dimensions of the MFC are set by the standard information given in the data sheet [
21]. All patches have a rectangular shape. After producing the electric charge and thus an electric voltage in the PM, the energy harvesting circuit (EHC) transforms the voltage. For most common applications in the field of EH, the provided AC voltage has to be converted into a DC voltage and further regulated in the applicable voltage range. Due to the fact that the output of the PM is not constant, electrical storage is necessary, buffering the produced power, thus stabilizing the output voltage for the load, which, in this application, is a sensor. In addition, the EHC contains a micro-controller responsible for controlling the charging of the storage and activation of the sensor. An example of an EHC was presented by Dembowski [
22].
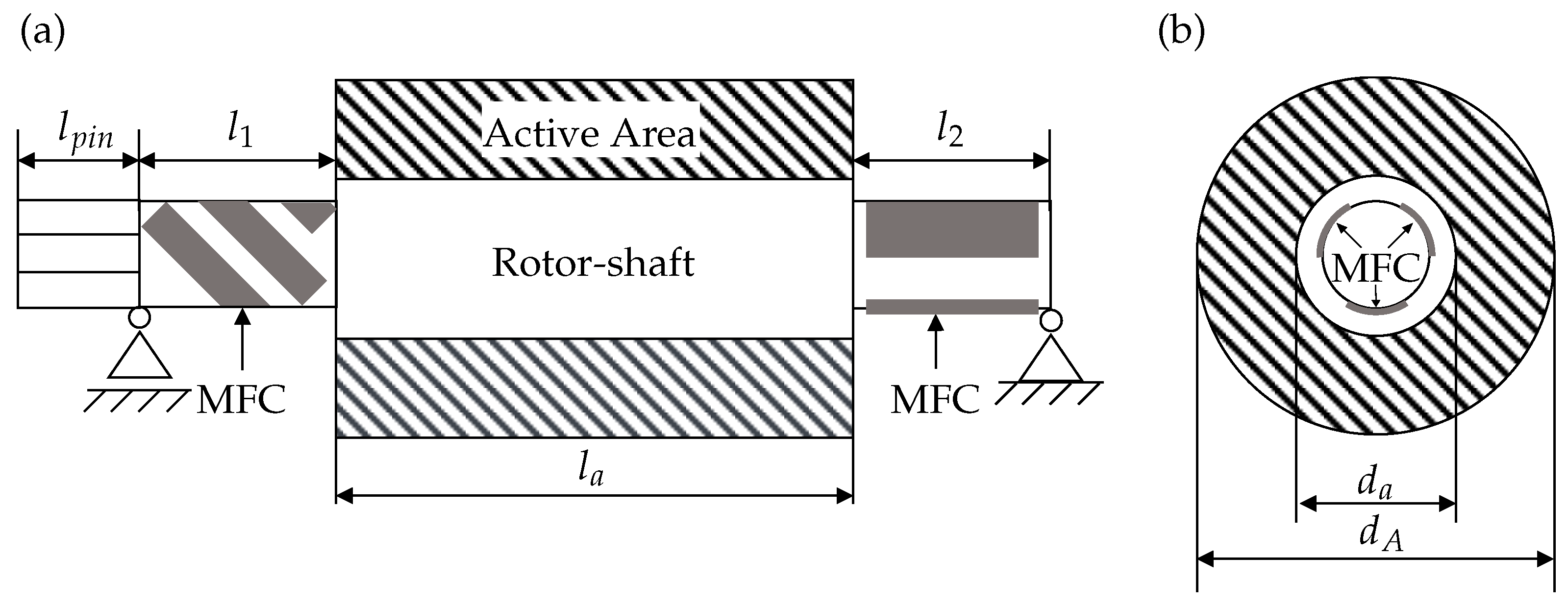
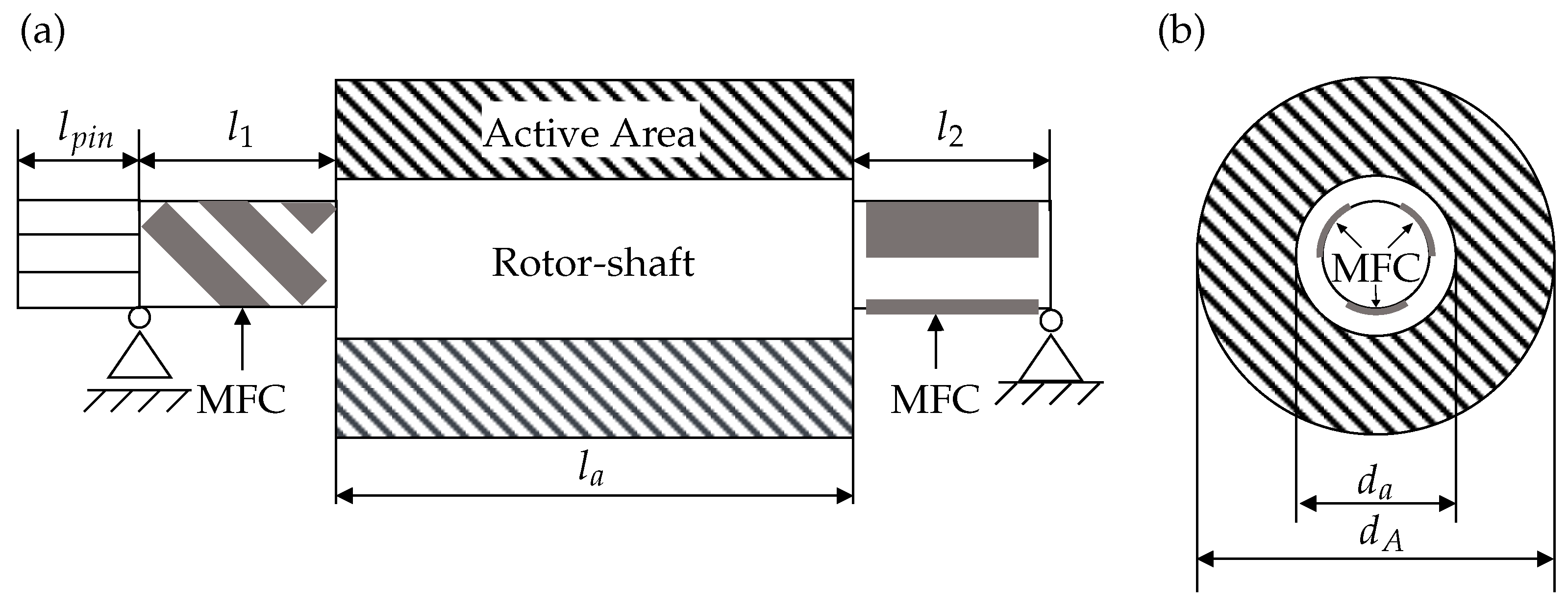
In the method presented in this article, the PEH uses the direct inducement of mechanical stress in the PM; hence, the PM is mounted directly on the rotor shaft. In this way, it can be assumed that the mechanical stresses in the PM and on the surface of the shaft are equivalent.
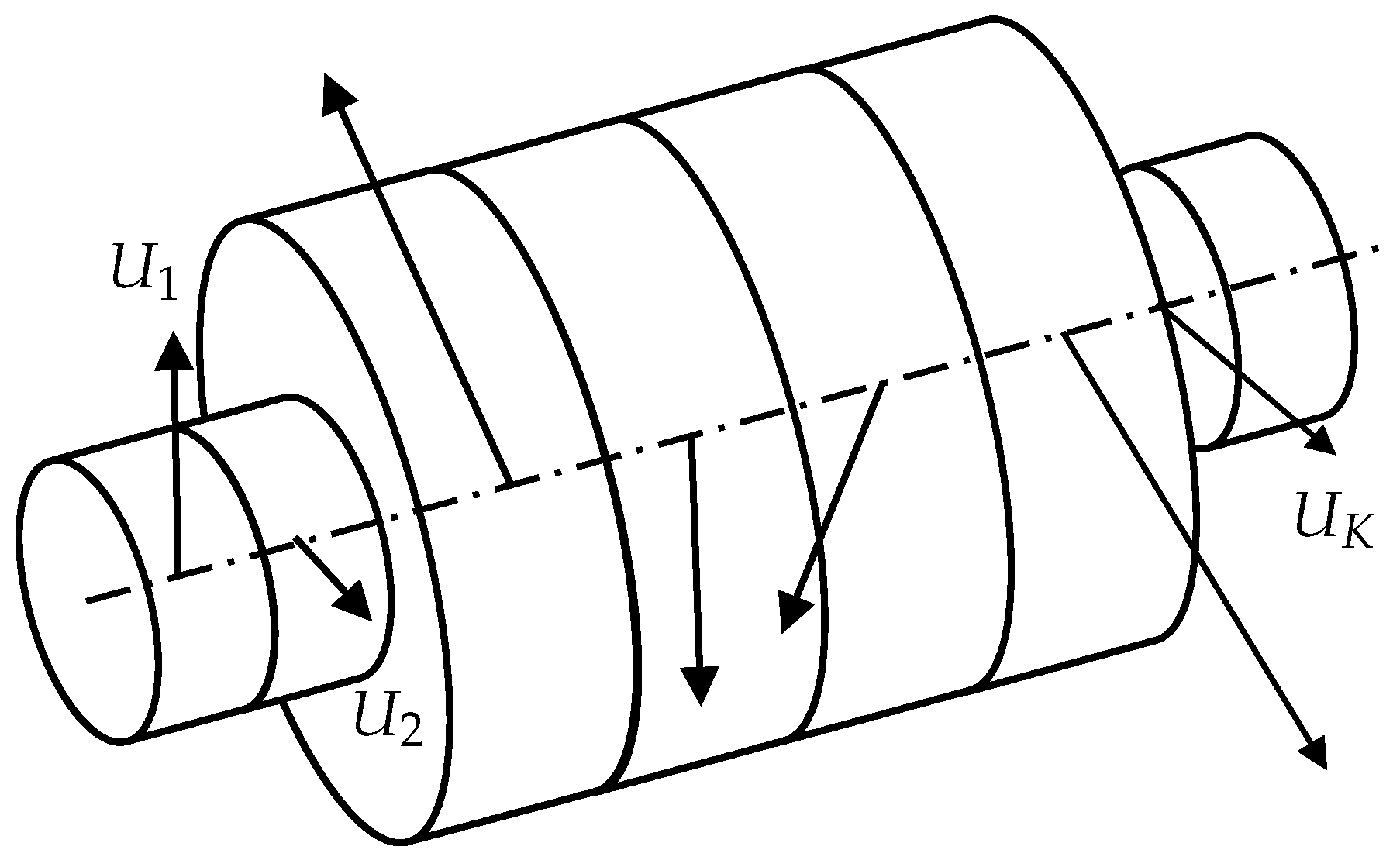
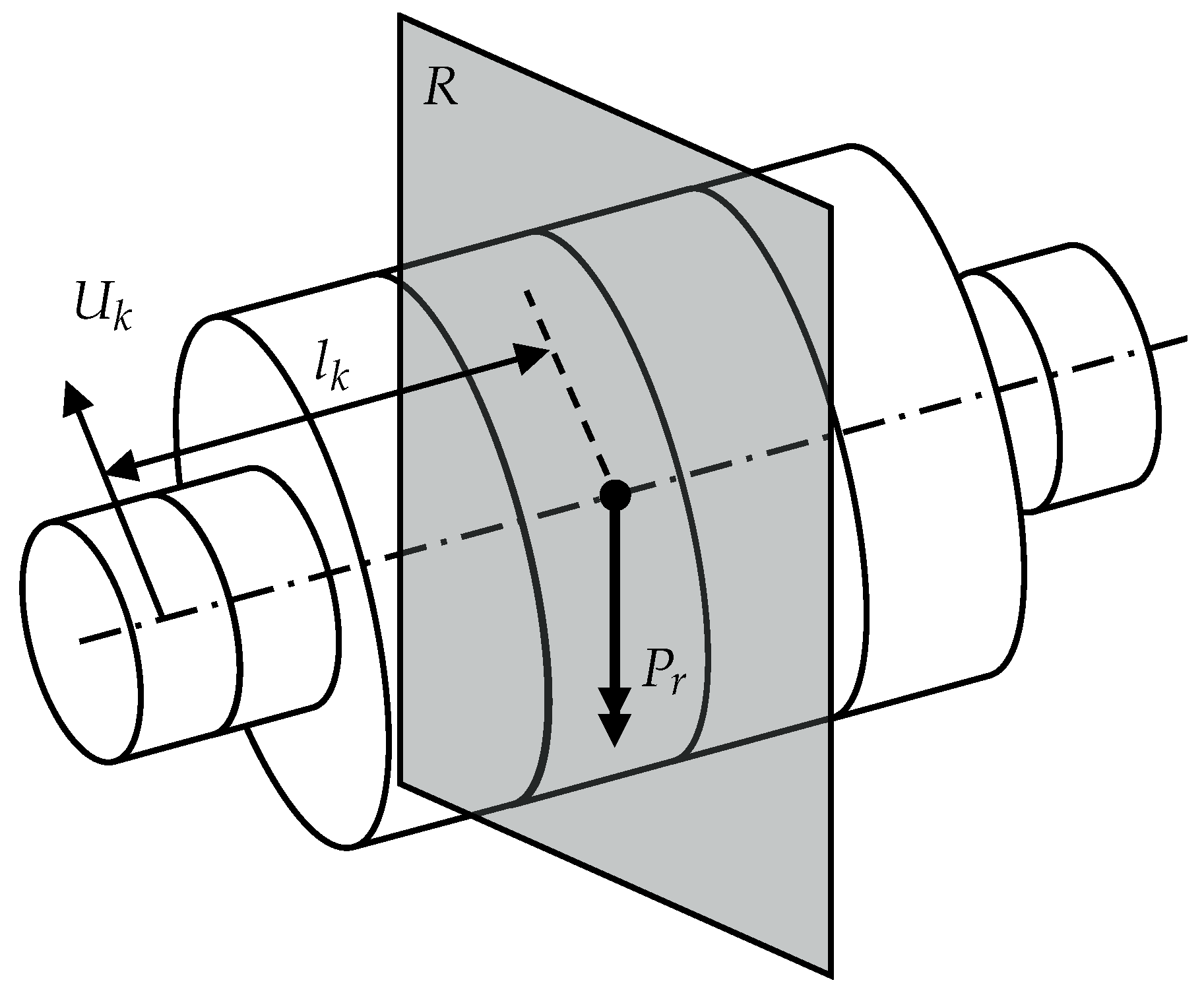
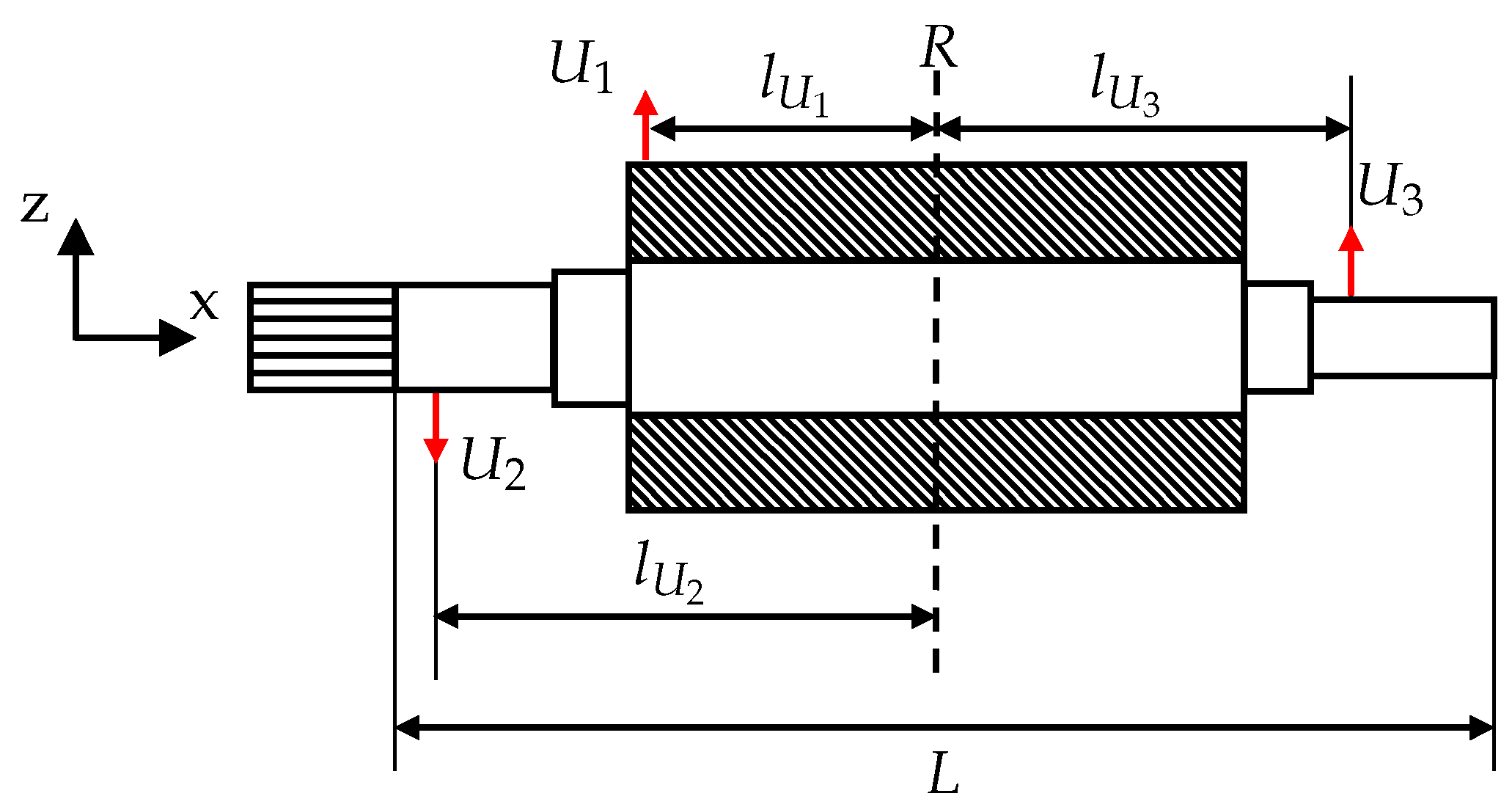
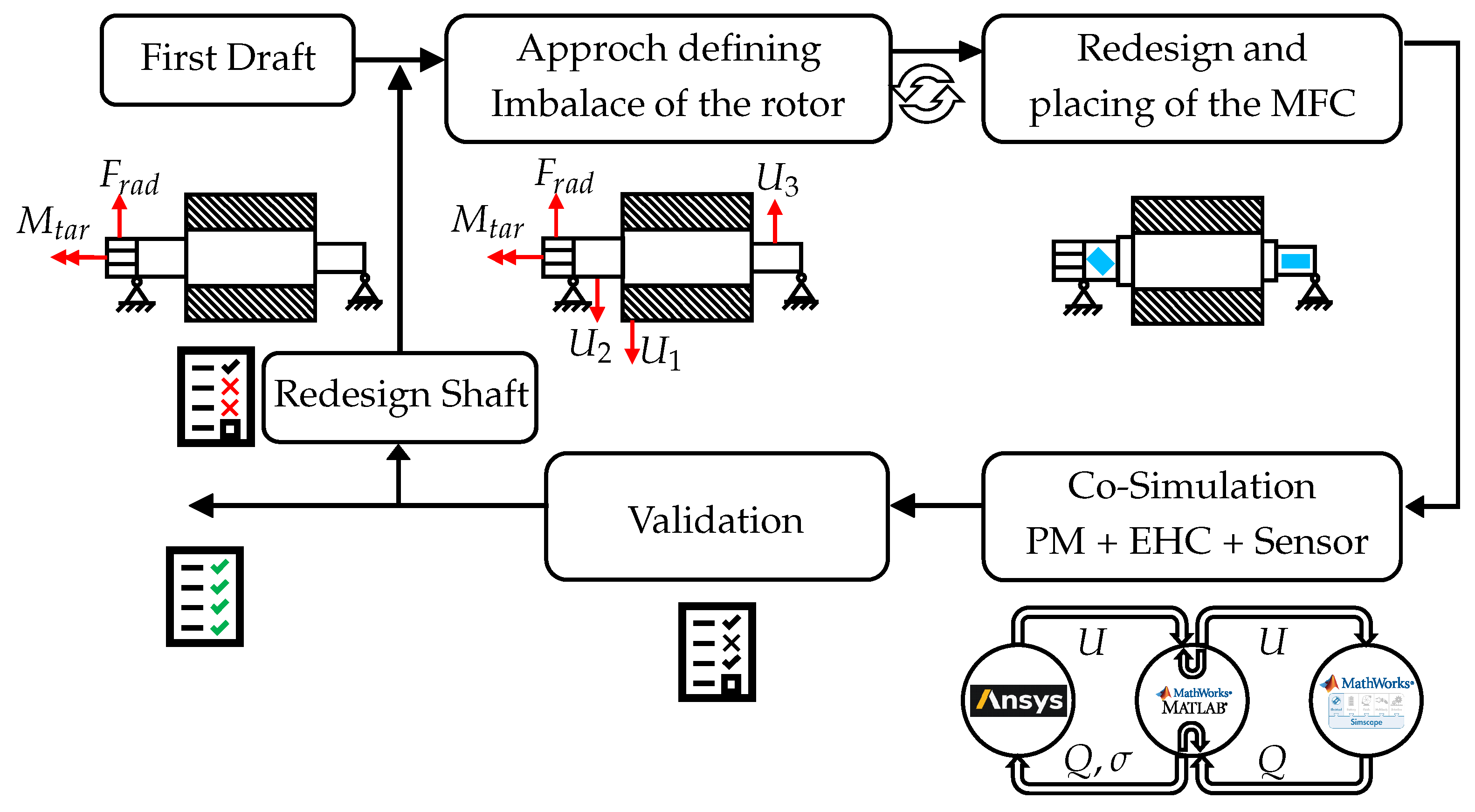
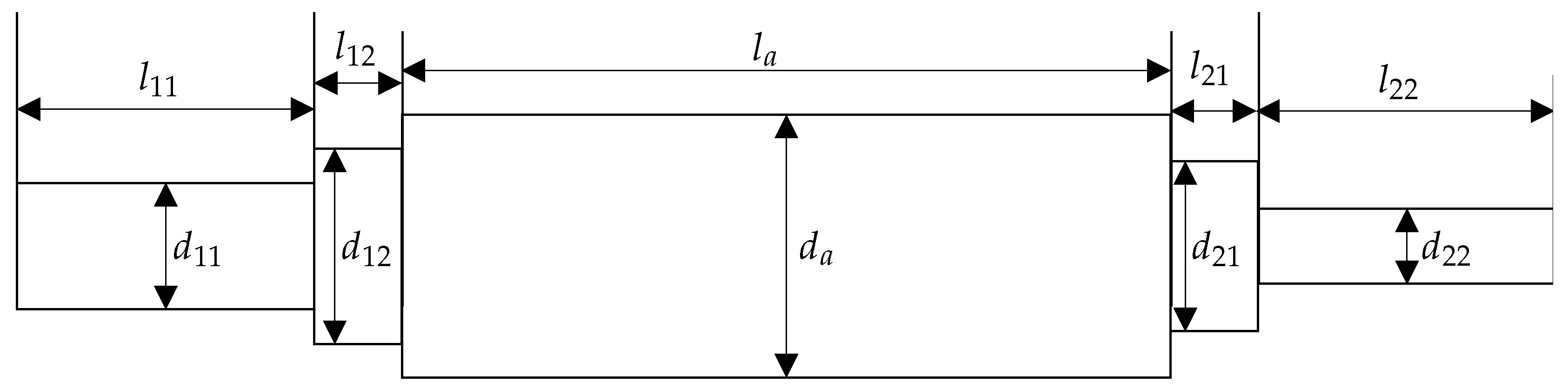
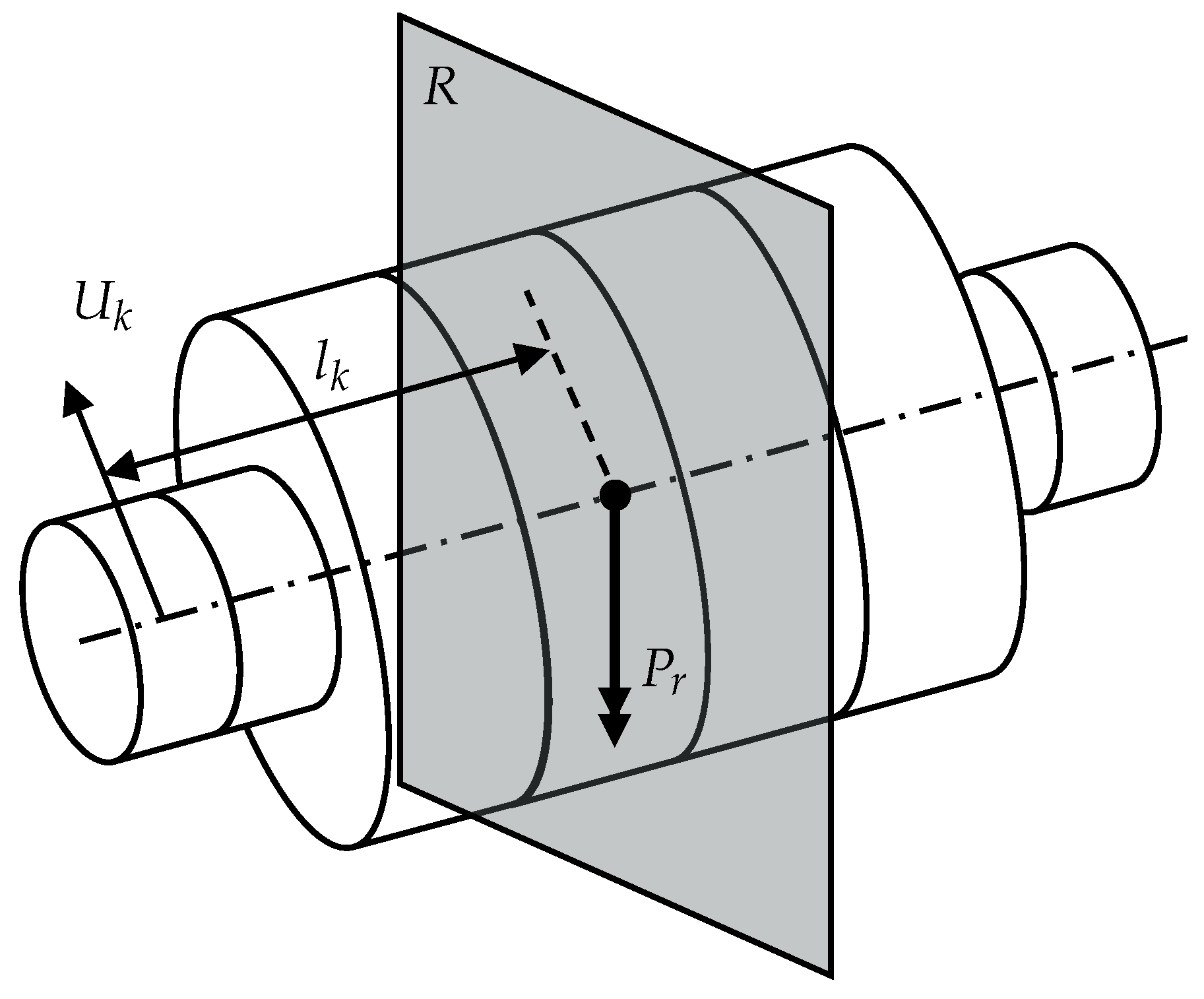
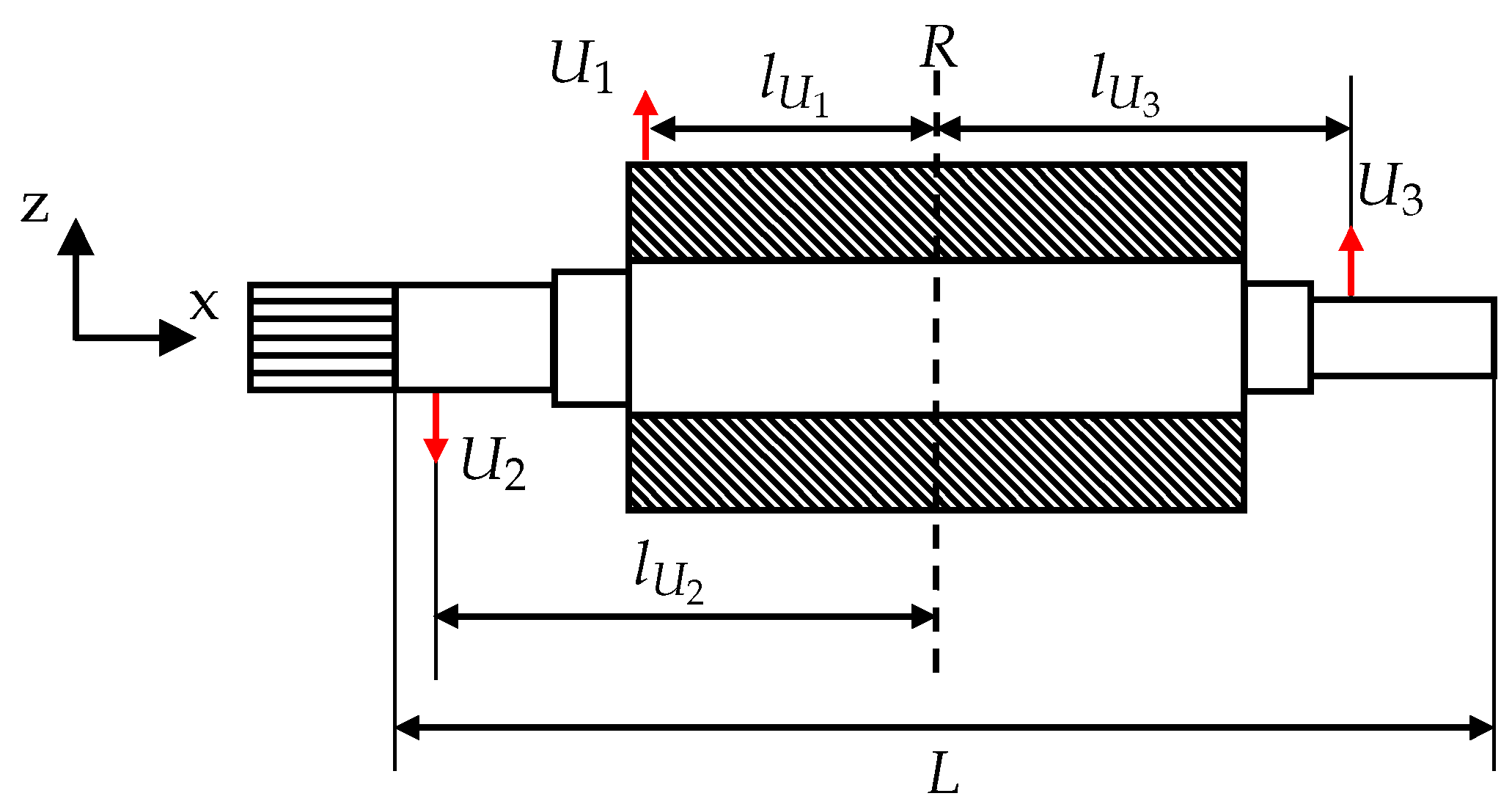
Figure 2 shows a schematic of a rotor including MFC patches as a PM. The length as well as the diameters of each part of the shaft can be calculated through the method presented in the following. The patches are placed outside the active area of the rotor and the mechanical stresses in this area are torsional and bending stresses, which both result from the torque generated in the EM. The bending stress occurs due to the radial force created by the pinion when transmitting the generated torque. In addition, the imbalance of the shaft induces bending stress. The MFC patches for the bending stress are placed with their piezoceramic fibers along the longitudinal axis of the shaft, where, for the torsional stress, they are rotated by an angle of
. On each side, three patches are placed, with those for the bending stresses separated by an angle of
, as shown in
Figure 2b.
Challenges in Designing PEH for Rotor Shafts
The design of PEHs requires knowledge about the mechanical stress applied, which is, in this case, mechanical stress on the surface of the rotor shaft. This means that the design of the EM, i.e., the design of the rotor shaft, is mandatory before starting the design process of the PEH.
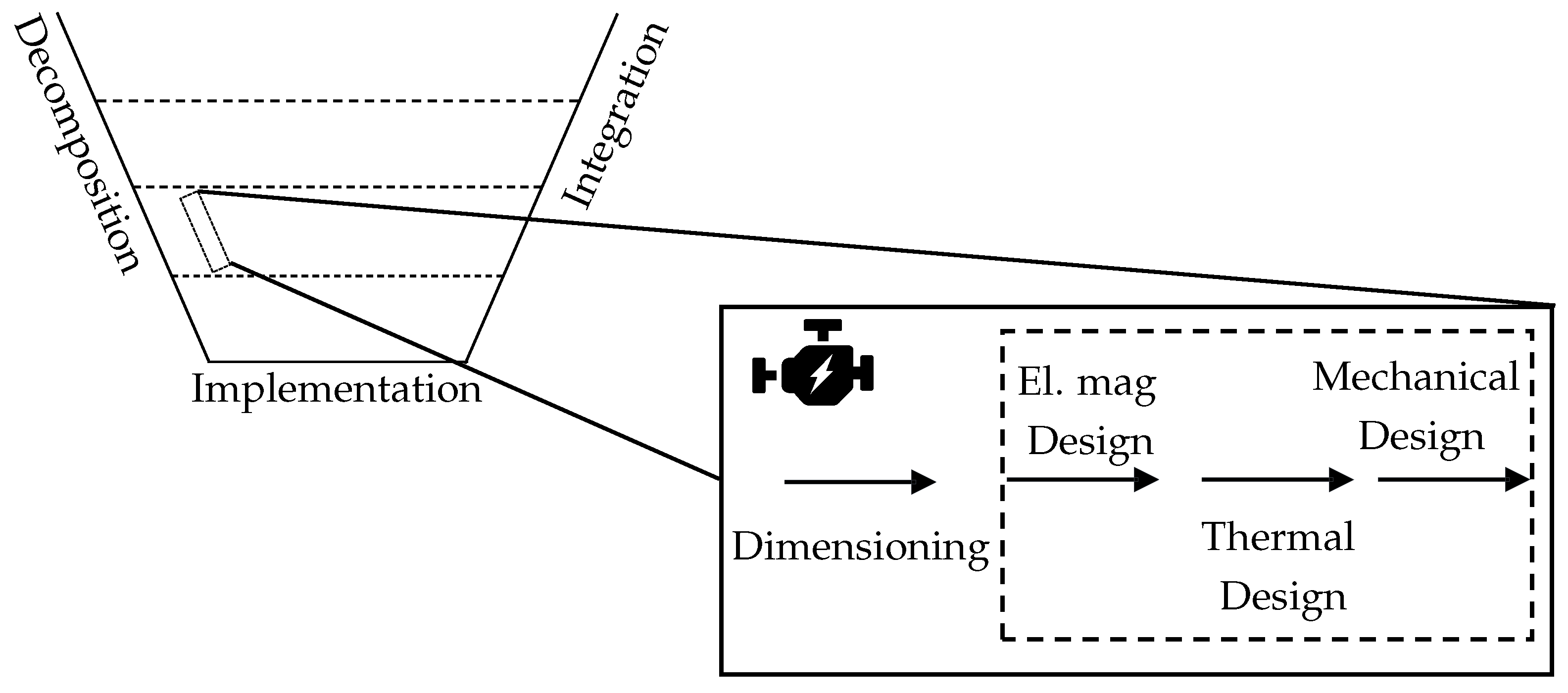
Figure 3 shows the V-model for the development of mechatronic systems defined by [
23], using the PEH as an exemplary component of the overall vehicle development. The V-model is used to determine the possible starting point of the PEH design. With the start at the upper left, a pursued business model is defined, based on the system to be developed. The highest system level is represented by the entire vehicle, comprising various aspects, including the requirement specifications. From this, functions are derived, realizing the requirements. The system is decomposed and subdivided into lower subsystems needed to fulfill the functions defined above. In the given example, this is the EM with exemplary requirements for the power output or durability due to functions like condition monitoring and predictive maintenance. The subsystems are decomposed further, down to the component level, in the last step. Here, the rotor shaft, power electronics, or sensors, including PEHs, are categorized. In each step, the requirements for the following subsystem and their corresponding functions are derived. Proceeding through the V-model, the level of detail increases corresponding to the decomposition. Data generated at each step in the development process are available for the following subsystems. According to the work of Daukaev et al. [
18] and Lei et al. [
24], and as illustrated in
Figure 3, the design process of the EM starts with electromagnetic design and ends with mechanical design. The development of the components follows the order of the provided data, as illustrated in
Figure 3. Therefore, the sizing of the rotor shaft is one of the last aspects to be determined. Due to this, knowledge about the mechanical stress on the surface of the shaft is only provided in the final design stage of EMs. Calculations or simulations regarding the power output of a PEH system and thus the realization of a sensor system can therefore only be achieved at the end of EM development. Possible adaptions to the shaft of the EM, increasing the power output to the required level, are therefore ruled out or are associated with high costs.
This results in the need for the development of PEHs parallel to EMs, especially in the context of PEHs powering sensor systems integrated with the operation of the EM, providing the potential for the increased reliability and efficiency of EMs, as presented by Meng et al. [
3] and Baumann et al. [
7]. For parallel design, PEHs must move one subsystem level further in the V-model. Further, PEH design before the process of mechanical design is necessary, so that the PEH defines the requirements for the rotor shaft. As the degree of detail decreases when moving up through the V-model, the provided data for the PEH design decrease as well. Provided data are now a requirement for the system vehicle. To enable parallel development, a method is necessary that adapts the PEH design from the component level to the new system level, where development takes place.
This method is presented in the following sections. It also defines the minimum amount of required data for the design process of EMs and thus the possible starting point for pre-PEH development.
4. Results
After presenting the method for the design of a PEH, the method is applied to an example. For the first step of the method, the necessary input data from
Table 2 are set based on the data of the BMW i3, which are shown in
Table 3.
Further, the specification of the PM, EHC and sensor is needed for the simulation of the PEH, as described in
Section 3.3. Dembrowski et al. [
22] designed an energy harvesting system in their work, whose structure is used and implemented in the co-simulation described in
Section 3.3.
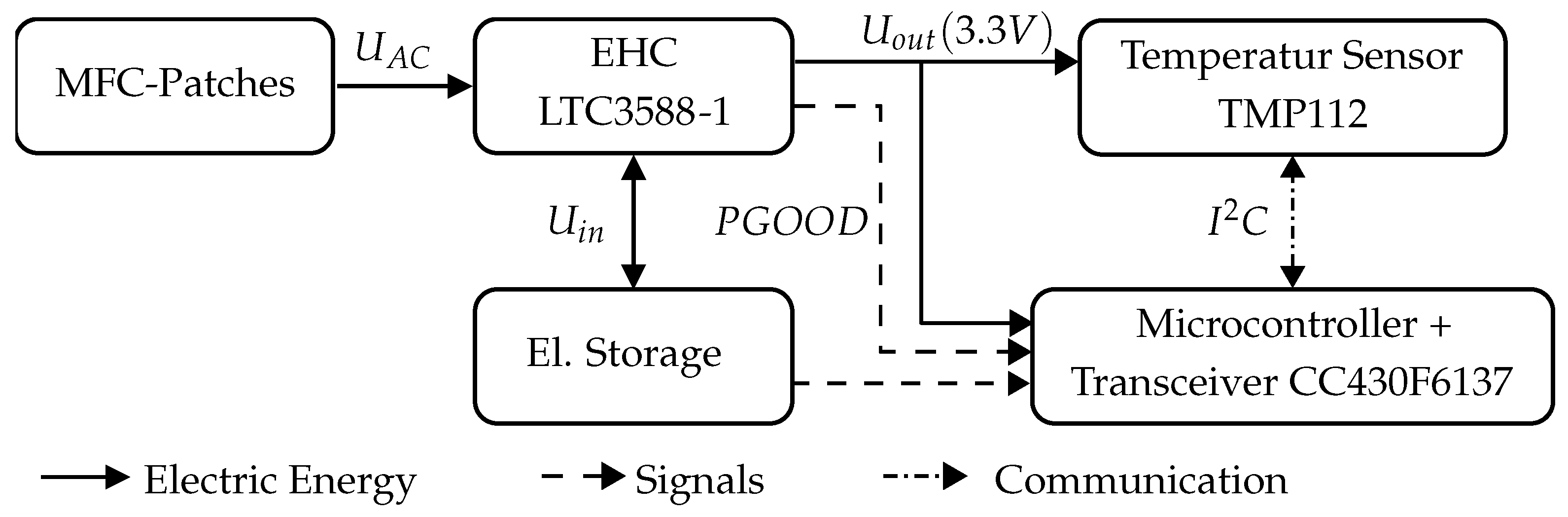
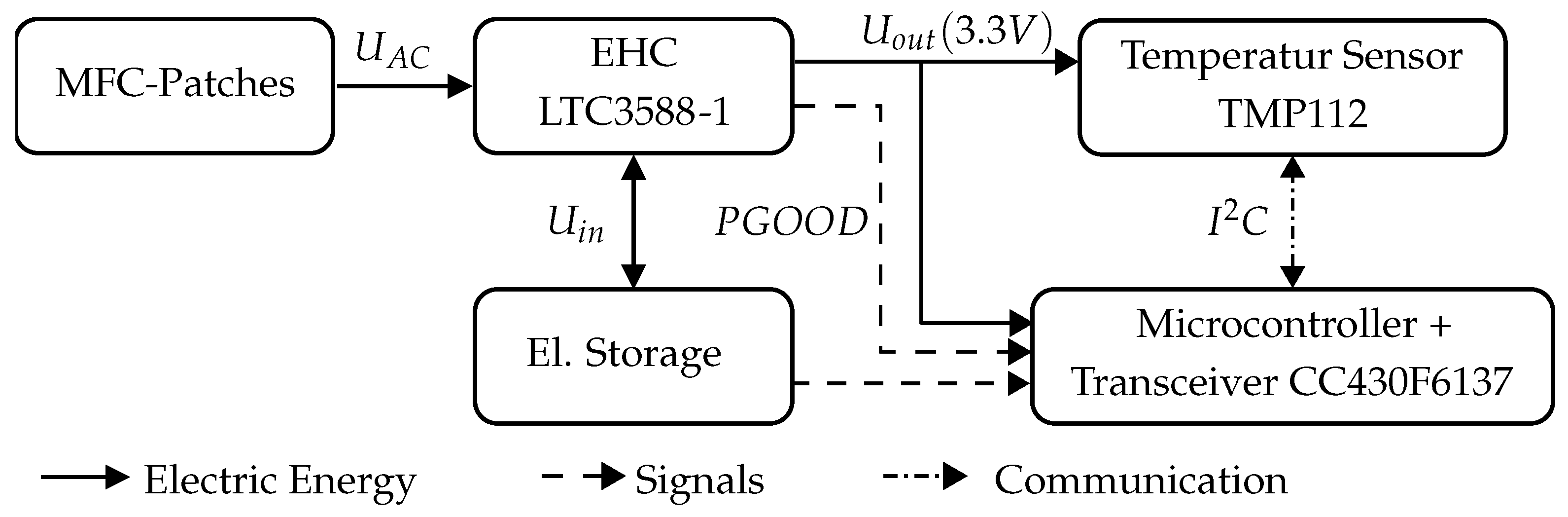
Figure 9 shows the elements of the system, starting with the PM in the form of the MFC patches generating an alternating voltage
, which is modified by the EHC. For the EHC in the given example, the LTC3588-1 [
34] is used, including a full-wave bridge rectifier and a buck converter to regulate the output voltage
.
In addition to the LTC3588-1, a capacitor as storage is added, storing the rectified voltage of the MFC patches. The state of charge of the capacitor is measured by the corresponding voltage
of the capacitor. The capacity
of the storage, defined by the charge
Q and the operating voltage
U, depends on the loads powered and the operating strategy of the sensor. The loads are the LTC3588-1, a fully integrated temperature sensor TMP112 and a microcontroller (
C). The LTC3588-1 has constant current consumption of
nA for a selected output voltage of
V. For one measurement of the temperature and the transmission of the data, the sensor and
C combined consume a charge of
As. Thus, the total charge of the loads for one measuring cycle,
with the measuring interval
s, is calculated. The consumption of the LTC3588-1 and the sensor system is the consumption measured by [
22] and includes energy losses. Further, the capacitor should be able to provide the charge for two measuring cycles. The operating voltage of the capacitor is limited by the EHC. With an operating voltage of
V, the buck converter sets the lower limit. Cutting
V with a Zener diode to protect the components of the EHC from over-voltage, the LTC3588-1 sets the higher limit. With this, the minimum capacity
can be calculated. Besides the calculation of
, a closer examination of the logic of the LTC3588-1 is necessary to determine the sensor’s operating strategy. As described before, the buck converter is activated when
V and then regulates
to the targeted 3.3 V. Reaching
V, which is indicated by the LTC3588-1 sending the logical output
, the
C is activated and monitors the capacitor’s state of charge. The sensor is enabled upon reaching
V, corresponding to fully charged storage, and is measures henceforth with
s. The deactivation of the sensor occurs when
drops below 11.89 V, because one measuring cycle leads to a drop of
and this results in
V, with the consequence of the deactivation of
C and the buck converter. The measurement is started again after the capacitor is fully charged.
With all parameters set, the method is applied. The dimensions of the shaft as well as the mechanical loads for the PM are calculated. The calculated data for the homogenized MFC patch are given in
Table A1, and
Table A2 shows all dimensions of the MFC patch. The shaft is shown in
Figure A1, with all parameters listed in
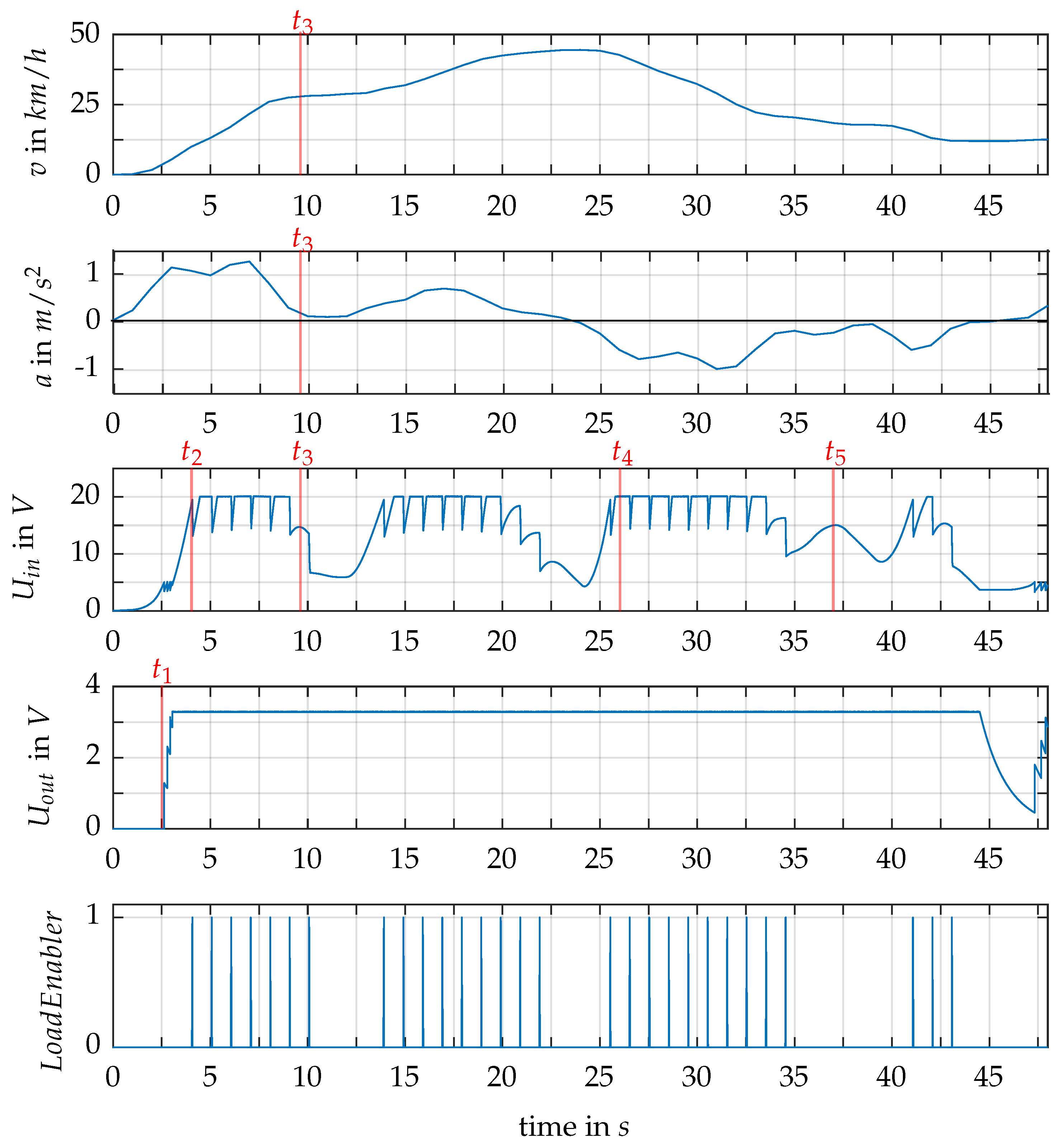
Table A3. In the presented work, the first 45 s of the WLTP are investigated. The results are presented in
Figure 10. The velocity
v of the vehicle corresponding to the rotating speed
of the EM, in addition to the acceleration
a representing the required torque
of the EM, is the input to the simulation. From
v and
a, the corresponding bending stresses due to the imbalance
and
are calculated with
alternating with a frequency of
.
Besides the driving scenario represented by the velocity
v and the acceleration
a,
Figure 10 shows the simulated voltage of the capacitor
and the output voltage
. Further, the
as a logical variable indicates the single measurements executed. In the following, key aspects of the simulated results are pointed out, showing the characteristics of the PEH system, especially of the EHC, and the feasibility of the PEH on the rotor shaft is reviewed by means of the achieved electric charge collected in the capacitor and the measuring cycles executed over the driving scenario.
Starting with the first characteristic point for the EHC , the acceleration from zero to around 30 km/h leads to the activation of the buck converter, which then increases step-wise up to the targeted V, enabling the start-up of the C after 3 s, monitoring from then on.
The requirement of a fully charged capacitor, to activate the sensor, is fulfilled at ; therefore, the C sends the logical signal and the drop in by the calculated V is perceivable.
A characteristic point that demonstrates the usefulness of the capacitor being able to store the amount of electrical charge to power the EHC and sensor for two measuring cycles is . Here, the MFC patches generate 41.6 As in the time from the last measuring cycle and do not recharge the capacitor by the consumed charge; thus, the charge for the upcoming measurement is provided by the storage, but this causes the sensor to be switched off afterwards, and a fully charged capacitor is necessary to reactivate the sensor. Further, illustrates the weakness of the PEH regarding a driving scenario with a constant velocity and minor acceleration.
However, the results show ranges in which the amount of generated energy by the MFC patches is higher than the energy that the PEH system is capable of storing, exemplified by , with reaching 20 V, leading the LTC3588-1 to cut the voltage. The resulting wasted energy illustrates the potential for optimization to enable the PEH system to use the full amount of energy provided by the MFC patches.
The need for further optimization regarding the operating strategy of the sensor is identified at , where the amount of energy provided by the system corresponds to a voltage of V and thus enough to power one measuring cycle. However, due to the operating strategy of charging the storage fully after has dropped below 11.68 V, the sensor is deactivated.
5. Discussion
In the development of EMs, prior studies have noted the importance of sensors measuring the physical parameters of the EM. In reviewing the literature, a need for sensors placed on the rotor of the machine is identified. Further, it becomes clear that the electrical power supply of the sensor is one major challenge in realizing its rotor-side placement. One possible solution is the application of energy harvesting systems, generating the required electrical power for a sensor.
This study aims to define a method for the design of a piezoelectric energy harvester, integrated within the rotor shaft. Investigating the design process of EMs, especially the rotor design, the study identifies a gap in the input data for PEH design between the provided and the needed data, based on the V-model. With this method, a pre-design of the rotor is accomplished, including a procedure to determine the mechanical imbalance of the rotor. The method is followed by a simulation model, calculating the power output of an energy harvesting system. The simulation deals with the back-coupling effect of piezoelectric materials, representing the nonlinear electronic components as a physical model. In combination with the FEM model for the PM, in the form of MFC patches, a co-simulation is implemented. Driving scenarios, like the WLTP, are used as inputs, defining the mechanical loads of the rotor and MFC patches.
In this work, the first 45 s of the WLTP are simulated. They provide the first indication of the feasibility of the implementation of PEHs on rotors. Overall, the results indicate that the MFC patches generate a sufficient amount of electrical energy to power a sensor, including wireless data transmission. This is reinforced by the fact that, during 66% of this scenario, the sensor is activated. Further, the results show the weak point of the system for driving scenarios with a constant driving speed in combination with low torque requests for the EM. Drawing on [
19,
22], the results of the method are verified by means of a comparison with the measured results of their work.
With the first approach to the design of a piezoelectric generator achieved, further research regarding the optimization of the system needs to be performed. Application strategies for the sensor in comparison with the operating strategy of the EHC represent one possible investigation. The influence on the achievable operating strategy of the sensor when changing the electrical storage capacity is one major aspect. The results of the simulation need to be validated by means of test bench measurements. For this, a possible test bench to measure the produced charge of the MFC patch under different loads is presented by Abdulkhaliq et al. [
1]. Adapting the test bench from the work of Micek et al. [
19] by integrating a rotor shaft calculated with the method presented in this work, including the EHC with the temperature sensor, would enable the validation of the results from the co-simulation. The presented work is a contribution to the field of energy harvesting. Introducing EH applications in EMs, the realization of various new sensor systems is achievable. Thus, with EH powering such sensors, an increase in the efficiency and reliability of EMs is achievable as their data enable functions like condition monitoring and predictive maintenance. Therefore, an approach for the design of a PEH is presented with a method predicated on standardized and recognized processes within the automotive industry. Further, the introduced approach is integrated within the overall vehicle design process. The method extends, compared to a cantilever beam as a PEH, the less researched field of directly mounted PEHs. Regarding the simulation of a PEH, the key strength of this study is the integration of a co-simulation model. Analytical methods for the calculation of the power output of the PEH are faster but are limited to linear electronic components, leading to incorrect values for the power output regarding nonlinear electronic components. Composed of an FEM model for the PM and a physical model for the electronic components, the co-simulation enables the integration of nonlinear components, which are included in the power electronics of the system, into the physical model. Further, the integration of an operating strategy for a sensor system is viable. In addition, the model transforms driving scenarios into mechanical stress for the PEH. The method can be applied throughout the entire design process of PEHs and is capable of providing an increase in the degree of detail.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}