
Research on Parameter Inversion of Coal Mining Subsidence Prediction Model Based on Improved Whale Optimization Algorithm


Abstract
1. Introduction
2. Probability Integral Method Predicted Model
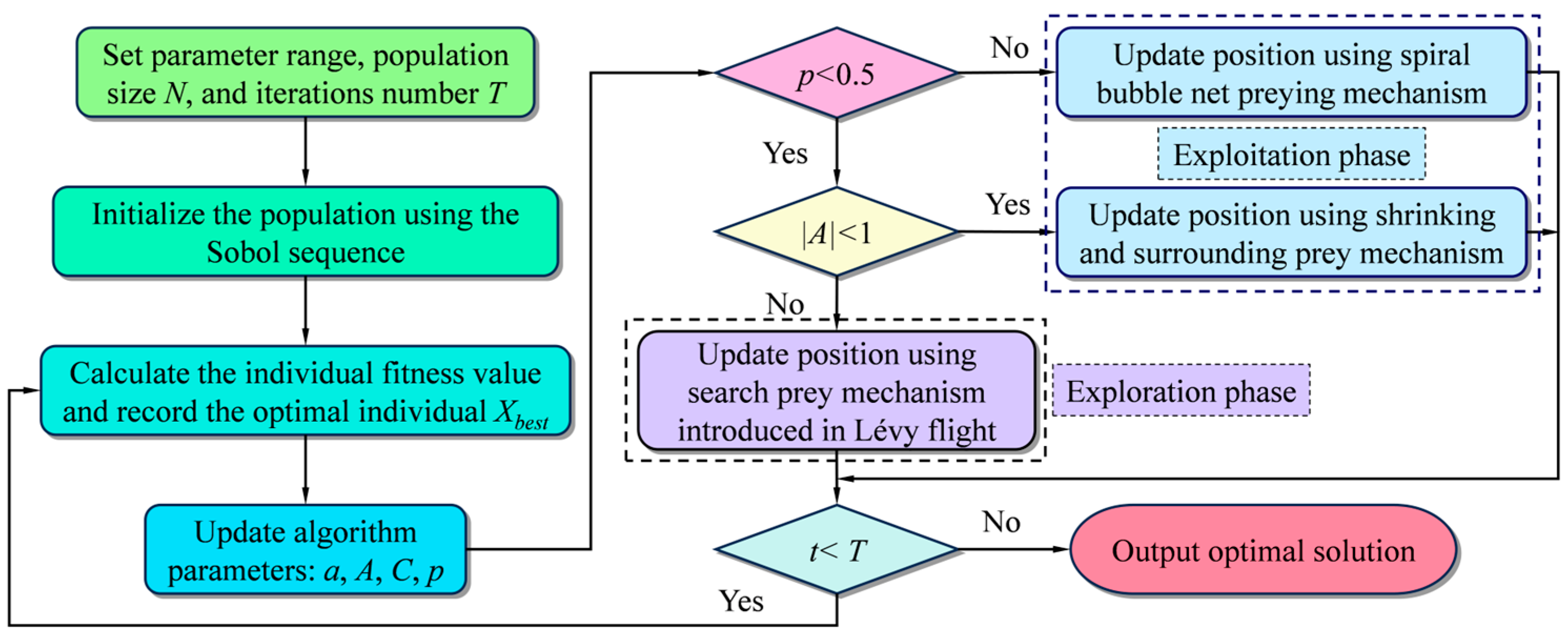
3. Parameter Inversion Model Based on IWOA
3.1. The Basic WOA
3.1.1. Shrinking and Encircling of Prey
3.1.2. Spiral Bubble Net Hunting
3.1.3. Prey Search
3.2. Improvement Strategy
3.2.1. Sobol Sequence Initializes the Population
3.2.2. Lévy Flight Strategy
3.3. Parameter Inversion Model of the PIM
4. Simulation Experiment
Simulation Experiment Results and Analysis
5. Discussion
5.1. Anti-Gross Error Interference Experiment
5.2. Anti-Gaussian Noise Interference Experiment
5.3. Anti-Missing Observation Point Interference Experiment
5.4. Global Search Performance
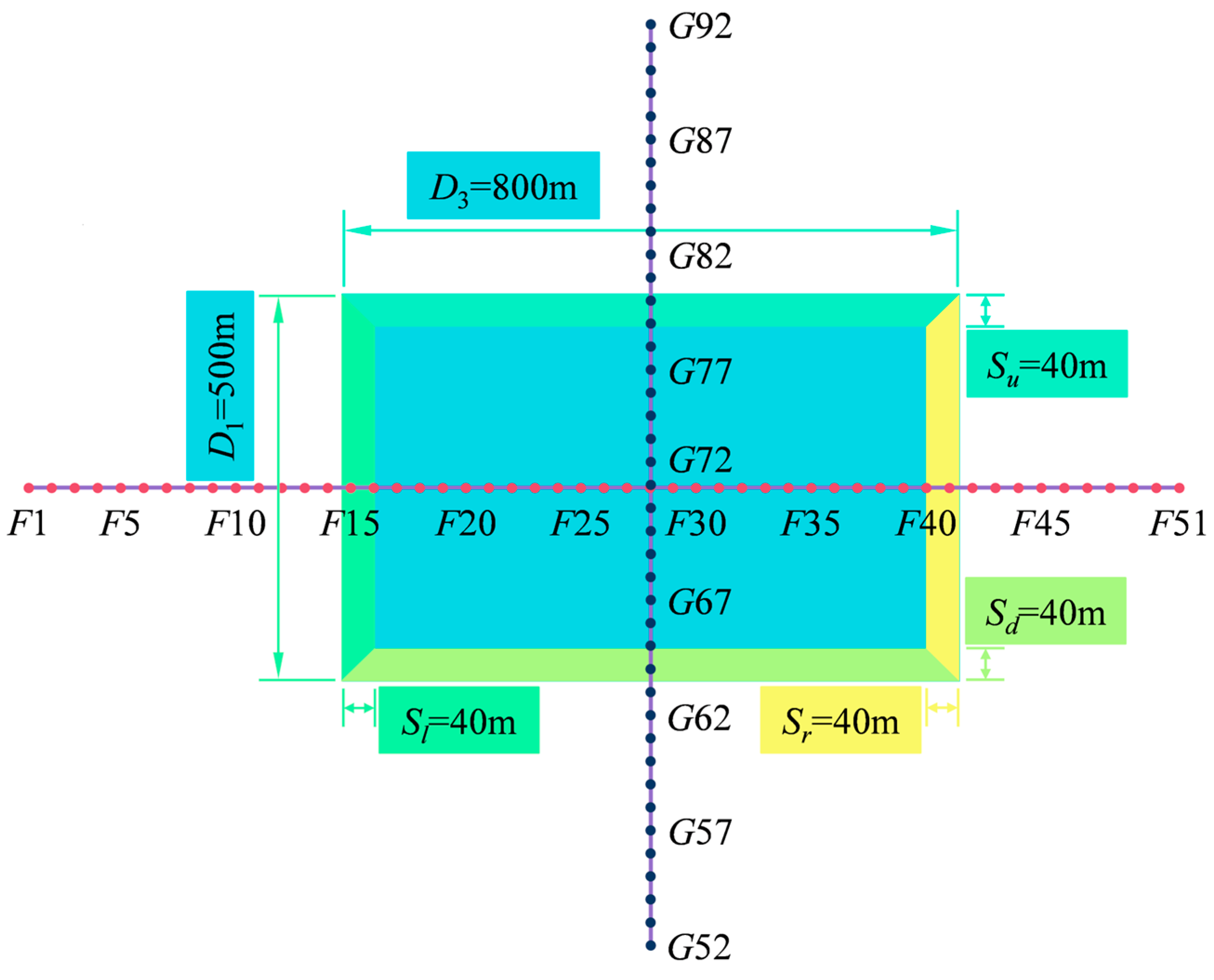
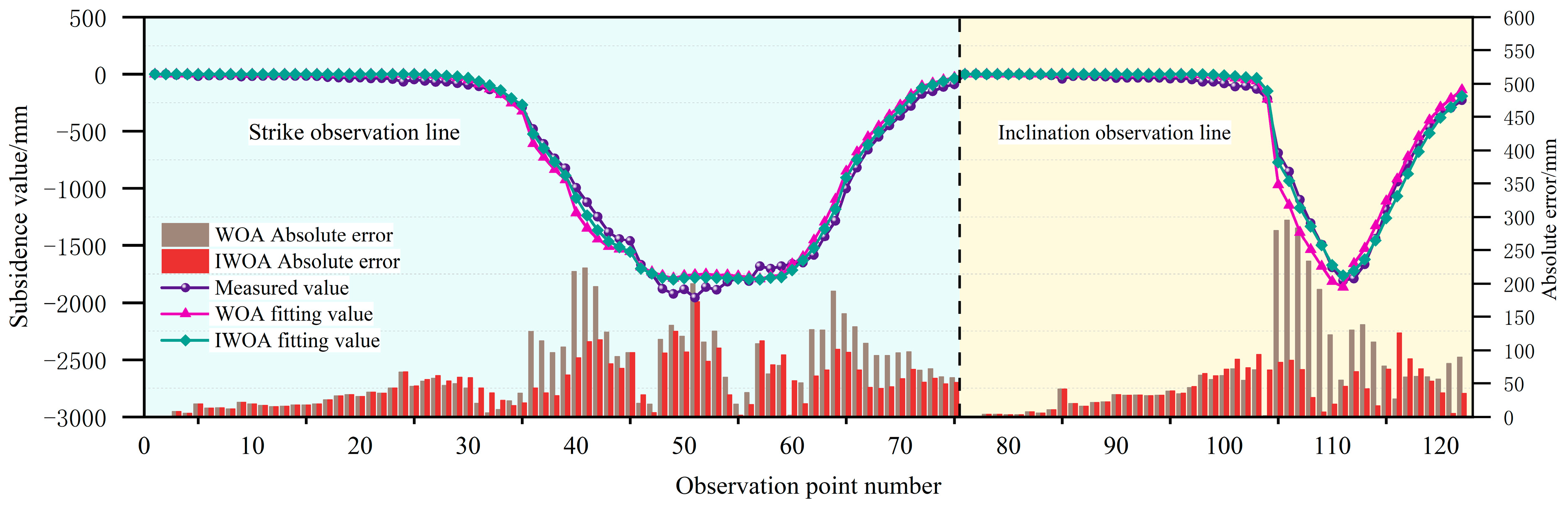
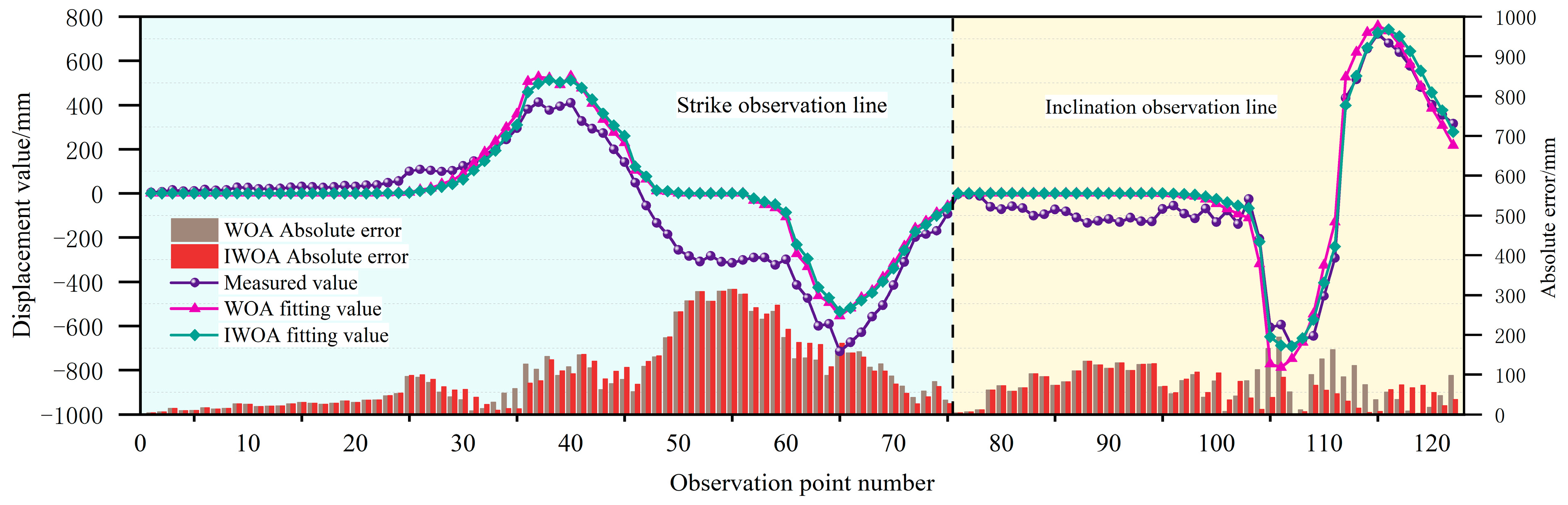
6. Engineering Applications
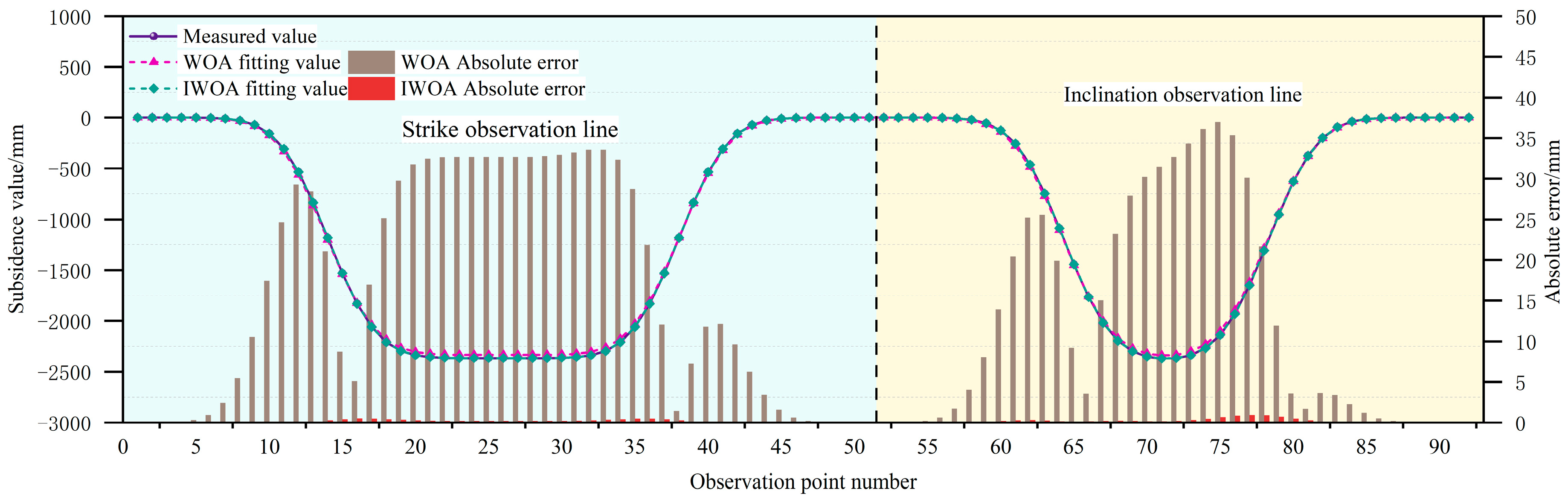
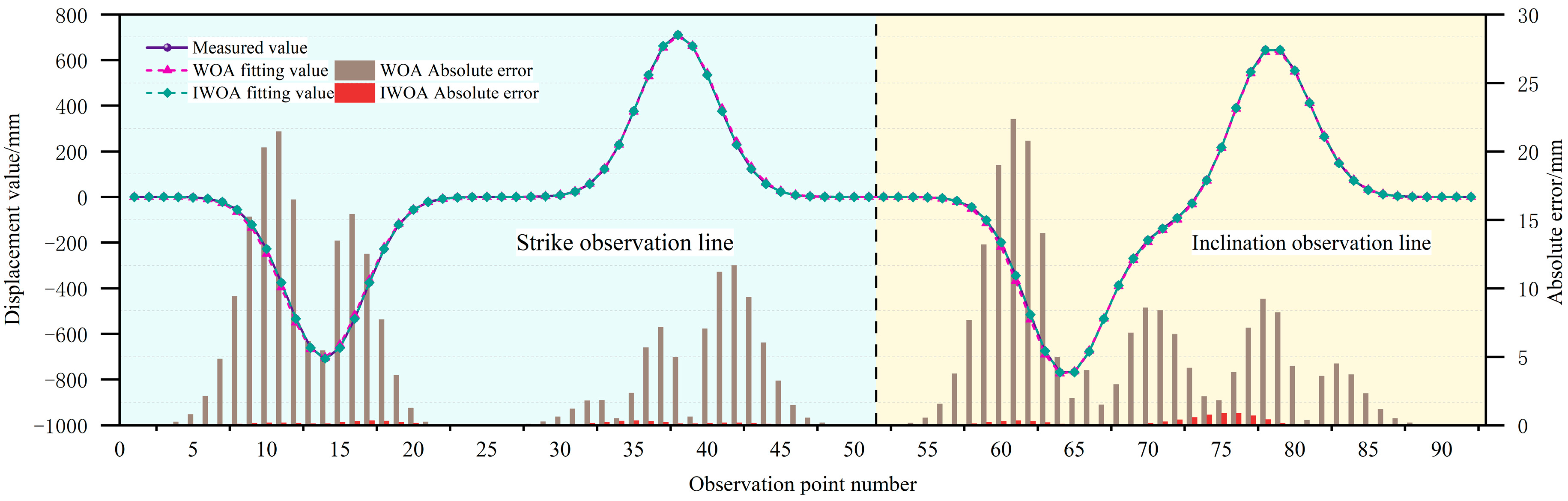
Results and Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chang, S.; Liu, Z.G.; Yang, S.; Fu, S.G.; Zhang, J.Y.; Qiao, G.D. Study on Simulation Experiment of Anti-reflection of Coal Seam Induced by Controlled Blasting in Soft Coal Seam Floor Strata. Coal Technol. 2023, 42, 169–174. [Google Scholar]
- Guo, G.L.; Wang, Y.J. Study of Robust Determining Parameters Model for Probability-integral Method and its Application. Act. Geod. Cartogr. Sin. 2000, 44, 162–165+171. [Google Scholar]
- Zha, J.F.; Jia, X.G.; Guo, G.L. Uniform Design Method for Initial Value Selection in Parameter Determination by Probability-Integral Method. Met. Min. 2006, 41, 27–29. [Google Scholar]
- Ge, J.X. Calculation and analysis of prediction parameters of surface subsidence. Min. Press. Roof Manag. 2004, 21, 78–79+82. [Google Scholar]
- Zha, J.F.; Feng, W.K.; Zhu, X.J. Research on Parameters Inversion in Probability Integral Method by Genetic Algorithm. J. Min. Saf. Eng. 2011, 28, 655–659. [Google Scholar]
- Yang, J.Y.; Liu, C.; Chen, T.Y.; Zhang, Y.M. The invasive weed optimization–based inversion of parameters in probability integral model. Arab. J. Geosci. 2019, 12, 424. [Google Scholar] [CrossRef]
- Li, J.Y.; Wang, L.; Zhu, S.J.; Teng, C.Q.; Jiang, K.G. Research on parameters estimation of probability integral model based on wolves pack algorithm. China Min. Mag. 2020, 29, 102–109. [Google Scholar]
- Teng, C.Q.; Wang, L.; Wei, P.; Li, J.Y.; Jiang, K.G.; Zhu, S.J. Parameter inversion of probability integral prediction based on shuffled frog leaping algorithm. J. Min. Strat. Control Eng. 2020, 2, 106–112. [Google Scholar]
- Lakshmi, A.V.; Mohanaiah, P. WOA-TLBO: Whale optimization algorithm with teaching-learning-based optimization for global optimization and facial emotion recognition. Appl. Soft Comput. 2021, 110, 107623. [Google Scholar] [CrossRef]
- Mafarja, M.; Mirjalili, S. Whale optimization approaches for wrapper feature selection. Appl. Soft Comput. 2018, 62, 441–453. [Google Scholar] [CrossRef]
- Wang, W.D.; Guo, X.S.; Wang, M.L.; Tian, G.C.; Li, Y.W. Surface movement law in shallow multi-seam coal mining. Coal Eng. 2023, 55, 136–141. [Google Scholar]
- Liu, B.C.; Dai, H.Y. Research Development and Origin of Probability Integral Method. Coal Min. 2016, 21, 1–3. [Google Scholar]
- Zhang, J.Z.; Zhang, T.; Zhang, G.; Kong, M. Parameter optimization of PID controller based on an enhanced whale optimization algorithm for AVR system. Oper. Res. 2023, 23, 44. [Google Scholar] [CrossRef]
- Zhang, X.M.; Ma, N.; Fu, W.; Ji, W.D.; Zhang, S.; Diao, Y.F. Adaptive whale optimization algorithm based on chaotic mapping and quadratic interpolation. Comput. Eng. Des. 2023, 44, 1088–1096. [Google Scholar]
- Li, M.Y.; Yang, J.W.; Yao, D.C.; Wang, J.H.; Hu, Z.S. Fault Diagnosis Method of Adaptive Resonance Demodulation Bearing Based on Whale Optimization Algorithm. Sci. Technol. Eng. 2023, 23, 3723–3729. [Google Scholar]
- Zhou, X.R.; Wang, F.; Yin, L.K.; San, R. Whale Optimization Algorithm Based on Improved Dynamic Factor. Sci. Technol. Eng. 2023, 23, 12145–12151. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Chang, Y.F.; Zhu, Z.M.; Tang, Y.; Huang, W.C. Wind power prediction model based on CEEMD and improved SSA-LSSVM. Transducer Microsyst. Technol. 2023, 42, 130–134. [Google Scholar]
- Shen, Y.H.; Zhang, C.; Yang, L.; Li, Y.Y.; Zheng, X.J. Research on eye movement data classification using support vector machine with improved whale optimization algorithm. J. Biomed. Eng. 2023, 40, 335–342. [Google Scholar]
- Shi, J.; Du, G.Q. Method and application of SVM optimized by improved sparrow search algorithm. Comput. Eng. Des. 2023, 44, 954–961. [Google Scholar]
- Wang, H.R.; XianYu, J.C. Application of Distributed Generation Configuration Based on Improved Sparrow Search Algorithm. Comput. Eng. Appl. 2021, 57, 245–252. [Google Scholar]
- Huang, J.Z.; Li, Z.; Li, S.B. Probability integral prediction parameter inversion method based on lion swarm optimization. Beijing Surv. Mapp. 2022, 36, 101–108. [Google Scholar]
- Huang, J.Z.; Wang, L.; Li, J.Y.; Jiang, C.; Teng, C.Q.; Li, Z.; Li, S.B. Comparison and Analysis of the Performance of Swarm Intelligence Optimization Algorithms for Inversion of Probability Integral Parameters. Met. Min. 2022, 57, 173–181. [Google Scholar]
- Guo, Q.B.; Chen, H.K.; Luo, J.; Wang, X.B.; Wang, L.; Lv, X.; Wang, L. Parameter inversion of probability integral method based on improved crow search algorithm. Arab. J. Geosci. 2022, 15, 180. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, K.G.; Wei, T.; Jiang, C.; Zha, J.F.; Chi, S.S. Estimation of parameters of probability integral method model based on improved fireworks algorithm. Surv. Rev. 2021, 53, 366–382. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | q | tanβ | b | θ/° | Su/m | Sd/m | Sl/m | Sr/m |
|---|---|---|---|---|---|---|---|---|
| Design value | 0.8 | 2.0 | 0.3 | 87 | 40 | 40 | 40 | 40 |
| Range | [0.6~1.0] | [1.6~2.4] | [0.2~0.4] | [84~90] | [30~50] | [30~50] | [30~50] | [30~50] |
| Parameter | Design Value | Average Value | RMSE | Relative Error/% | |||
|---|---|---|---|---|---|---|---|
| WOA | IWOA | WOA | IWOA | WOA | IWOA | ||
| q | 0.8 | 0.7898 | 0.8000 | 0.0138 | 0.0004 | −1.2807 | 0.0035 |
| tanβ | 2.0 | 1.9706 | 2.0008 | 0.1758 | 0.0037 | −1.4708 | 0.0400 |
| b | 0.3 | 0.3021 | 0.2999 | 0.0264 | 0.0006 | 0.7021 | −0.0271 |
| θ/° | 87 | 86.7074 | 86.9943 | 0.9870 | 0.0267 | −0.3363 | −0.0065 |
| Su/m | 40 | 39.2454 | 40.0515 | 5.5328 | 0.2005 | −1.8865 | 0.1288 |
| Sd/m | 40 | 38.4423 | 39.8955 | 5.3552 | 0.4123 | −3.8943 | −0.2612 |
| Sl/m | 40 | 36.7444 | 39.9850 | 4.6608 | 0.0864 | −8.1391 | −0.0376 |
| Sr/m | 40 | 38.7021 | 39.9852 | 6.2583 | 0.1630 | −3.2449 | −0.0371 |
| Parameter | WOA | IWOA | ||||||
|---|---|---|---|---|---|---|---|---|
| 0.1 Wmax | 0.15 Wmax | 0.1 Wmax | 0.15 Wmax | |||||
| Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | |
| q | 0.8105 | 1.3114 | 0.8137 | 1.7088 | 0.8075 | 0.9345 | 0.8103 | 1.2913 |
| tanβ | 2.0110 | 0.5513 | 2.0052 | 0.2602 | 1.9778 | −1.1076 | 1.9744 | −1.2796 |
| b | 0.2935 | −2.1742 | 0.2894 | −3.5325 | 0.2953 | −1.5647 | 0.2937 | −2.0948 |
| θ/° | 86.9494 | −0.0582 | 86.6635 | −0.3867 | 86.9873 | −0.0146 | 86.9612 | −0.0446 |
| Su/m | 39.5275 | −1.1812 | 38.8974 | −2.7564 | 38.1947 | −4.5133 | 37.1151 | −7.2121 |
| Sd/m | 37.0992 | −7.2519 | 36.5614 | −8.5964 | 38.0041 | −4.9898 | 36.7356 | −8.1611 |
| Sl/m | 38.3102 | −4.2246 | 38.4361 | −3.9099 | 37.8268 | −5.4330 | 36.2704 | −9.3241 |
| Sr/m | 39.1182 | −2.2044 | 38.7484 | −3.1291 | 38.0919 | −4.7701 | 36.9054 | −7.7365 |
| Parameter | WOA | IWOA | ||||||
|---|---|---|---|---|---|---|---|---|
| N(0,25) | N(0,100) | N(0,25) | N(0,100) | |||||
| Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | |
| q | 0.7934 | −0.8210 | 0.8107 | 1.3343 | 0.8004 | 0.0521 | 0.8093 | 1.1615 |
| tanβ | 1.9756 | −1.2184 | 2.0934 | 4.6701 | 2.0057 | 0.2863 | 2.0161 | 0.8037 |
| b | 0.3096 | 3.2127 | 0.3036 | 1.1863 | 0.3009 | 0.2872 | 0.3021 | 0.7028 |
| θ/° | 86.6062 | −0.4526 | 86.7436 | −0.2947 | 86.9902 | −0.0113 | 86.8347 | −0.1900 |
| Su/m | 39.4309 | −1.4228 | 40.9321 | 2.3302 | 39.9342 | −0.1644 | 41.4598 | 3.6494 |
| Sd/m | 37.3908 | −6.5230 | 38.7917 | −3.0208 | 39.7481 | −0.6298 | 41.0004 | 2.5010 |
| Sl/m | 36.7321 | −8.1697 | 38.6135 | −3.4663 | 39.4329 | −1.4176 | 41.0847 | 2.7117 |
| Sr/m | 40.1607 | 0.4017 | 41.6880 | 4.2200 | 39.8610 | −0.3474 | 40.3978 | 0.9945 |
| Parameter | Design Value | Missing 5 Points | Missing 10 Points | Missing Key Points | |||
|---|---|---|---|---|---|---|---|
| Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | ||
| q | 0.8 | 0.7999 | −0.0092 | 0.7996 | −0.0557 | 0.7998 | −0.0278 |
| tanβ | 2.0 | 2.0006 | 0.0317 | 2.0030 | 0.1475 | 2.0019 | 0.0972 |
| b | 0.3 | 0.2997 | −0.0847 | 0.3005 | 0.1617 | 0.3002 | 0.0724 |
| θ/° | 87 | 86.9931 | −0.0079 | 86.9896 | −0.0120 | 86.9933 | −0.0077 |
| Su/m | 40 | 40.1022 | 0.2555 | 40.0749 | 0.1872 | 40.0828 | 0.2069 |
| Sd/m | 40 | 39.9852 | −0.0371 | 39.8415 | −0.3963 | 39.9485 | −0.1287 |
| Sl/m | 40 | 39.8968 | −0.2580 | 39.8458 | −0.3855 | 39.9610 | −0.0976 |
| Sr/m | 40 | 40.0010 | 0.0025 | 39.9250 | −0.1874 | 40.0914 | 0.2284 |
| Parameter | Design Value | Rang 1 | Rang 2 | Rang 3 |
|---|---|---|---|---|
| q | 0.8 | [0.7~0.9] | [0.6~1.0] | [0.5~1.1] |
| tanβ | 2.0 | [1.8~2.2] | [1.6~2.4] | [1.4~2.6] |
| b | 0.3 | [0.25~0.35] | [0.2~0.4] | [0.1~0.5] |
| θ/° | 87 | [85~89] | [84~90] | [80~90] |
| Su/m | 40 | [35~45] | [30~50] | [20~60] |
| Sd/m | 40 | [35~45] | [30~50] | [20~60] |
| Sl/m | 40 | [35~45] | [30~50] | [20~60] |
| Sr/m | 40 | [35~45] | [30~50] | [20~60] |
| Parameter | Design Value | Rang 1 | Rang 2 | Rang 3 | |||
|---|---|---|---|---|---|---|---|
| Average Value | Relative Error/% | Average Value | Relative Error/% | Average Value | Relative Error/% | ||
| q | 0.8 | 0.7998 | −0.0224 | 0.8000 | 0.0035 | 0.7999 | −0.0180 |
| tanβ | 2.0 | 2.0010 | 0.0492 | 2.0008 | 0.0400 | 2.0008 | 0.0408 |
| b | 0.3 | 0.3002 | 0.0583 | 0.2999 | −0.0271 | 0.2998 | −0.0747 |
| θ/° | 87 | 86.9995 | −0.0006 | 86.9943 | −0.0065 | 87.0108 | 0.0125 |
| Su/m | 40 | 39.9898 | −0.0256 | 40.0515 | 0.1288 | 40.2229 | 0.5573 |
| Sd/m | 40 | 39.9955 | −0.0113 | 39.8955 | −0.2612 | 40.3886 | 0.9715 |
| Sl/m | 40 | 39.9486 | −0.1284 | 39.9850 | −0.0376 | 39.3002 | −1.7494 |
| Sr/m | 40 | 39.9983 | −0.0042 | 39.9852 | −0.0371 | 39.9923 | −0.0191 |
| Parameter | Range | Average Value | RMSE | ||
|---|---|---|---|---|---|
| WOA | IWOA | WOA | IWO | ||
| q | [0.7~1.3] | 1.034 | 0.966 | 0.086 | 0.033 |
| tanβ | [1.5~2.5] | 1.991 | 2.015 | 0.224 | 0.023 |
| b | [0.05~0.45] | 0.304 | 0.295 | 0.044 | 0.003 |
| θ/° | [85~92] | 89.213 | 91.179 | 0.626 | 0.313 |
| Su/m | [−20~20] | 1.572 | −1.886 | 10.382 | 6.028 |
| Sd/m | [−30~10] | −11.376 | −18.860 | 9.852 | 5.070 |
| Sl/m | [45~85] | 70.370 | 57.146 | 13.519 | 4.848 |
| Sr/m | [25~65] | 43.089 | 60.970 | 9.883 | 4.851 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Qiao, B.; Yang, Y.; Guo, J. Research on Parameter Inversion of Coal Mining Subsidence Prediction Model Based on Improved Whale Optimization Algorithm. Energies 2024, 17, 1158. https://doi.org/10.3390/en17051158
Guo Q, Qiao B, Yang Y, Guo J. Research on Parameter Inversion of Coal Mining Subsidence Prediction Model Based on Improved Whale Optimization Algorithm. Energies. 2024; 17(5):1158. https://doi.org/10.3390/en17051158
Chicago/Turabian StyleGuo, Qingbiao, Boqing Qiao, Yingming Yang, and Junting Guo. 2024. "Research on Parameter Inversion of Coal Mining Subsidence Prediction Model Based on Improved Whale Optimization Algorithm" Energies 17, no. 5: 1158. https://doi.org/10.3390/en17051158
APA StyleGuo, Q., Qiao, B., Yang, Y., & Guo, J. (2024). Research on Parameter Inversion of Coal Mining Subsidence Prediction Model Based on Improved Whale Optimization Algorithm. Energies, 17(5), 1158. https://doi.org/10.3390/en17051158