1. Introduction
The wind turbine is a rigid–flexible coupling system, and its blades will be deformed under the action of aerodynamic force, inertia force, and elastic force, which affects the operation of the wind turbine. To monitor the deformation of the blades, this paper builds a dynamic deformation measurement system of wind turbine blades based on 3D-DIC technology and directly measures the three-dimensional displacement distribution of the blades made of different elastic modulus materials under different operating conditions to obtain the dynamic deformation of the blades. The experimental results show that the dynamic waving deformation of wind turbine blades shows a trend of increasing and then decreasing with the increase in wind turbine rotational speed and incoming wind speed, and the wind turbine blade, as one of the most critical components of the wind turbine, is deformed by aerodynamic, elastic, and inertial forces [
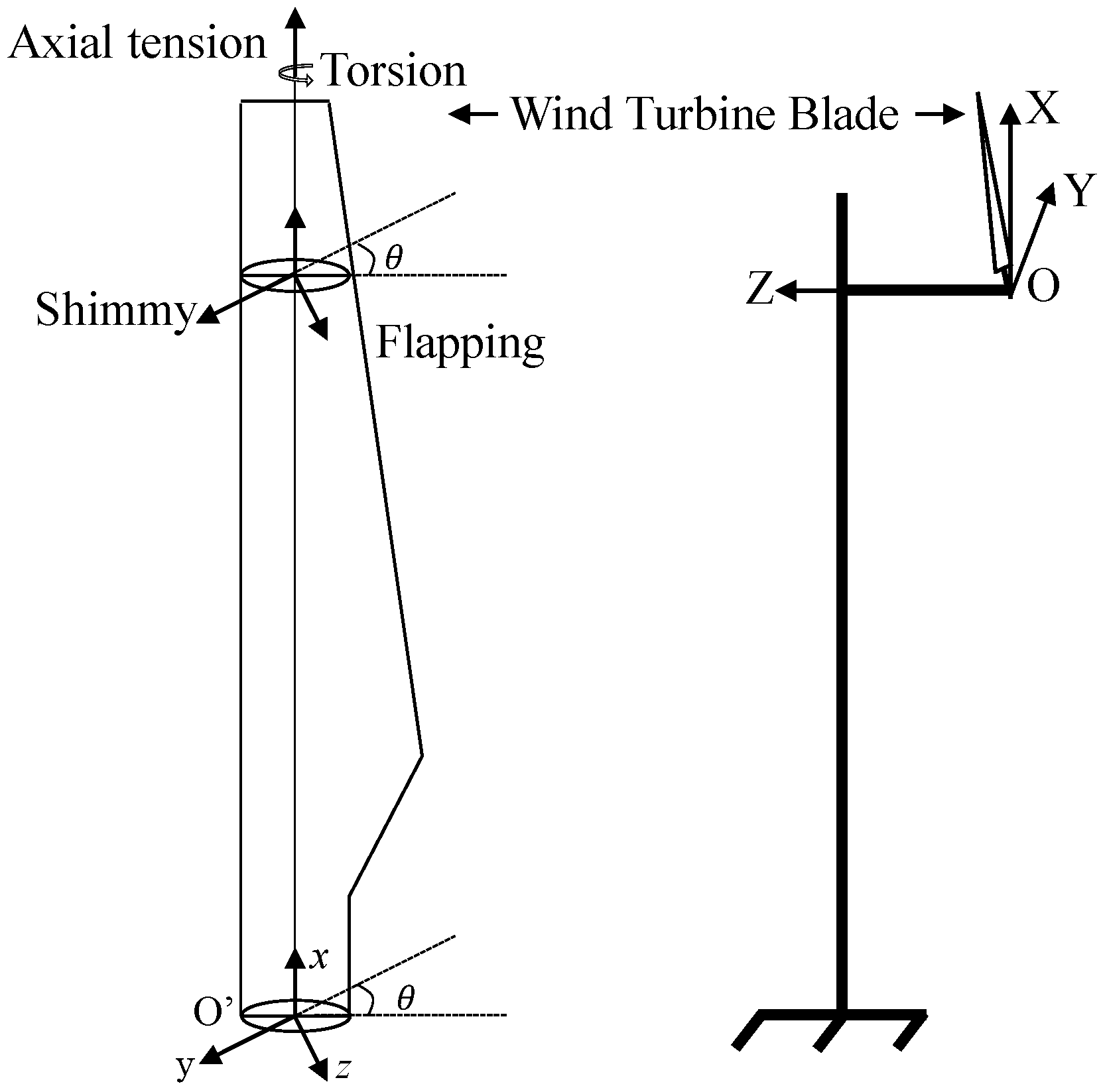
1]. Blade deformation is divided into waving deformation, torsion deformation, and oscillation deformation, of which the amount of oscillation deformation and torsion deformation is relatively small. Wind turbine operating conditions have a certain effect on blade deformation [
2], and at the same time, it is related to the blade elastic modulus and the geometry of the airfoil section [
3]. The deformation of the blade not only causes changes in the blade winding flow field but also affects its service life. Therefore, monitoring the deformation law of the blade under operating conditions can provide a theoretical basis for the safe and stable operation of the blade and structural optimization.
To simulate more accurately the real working conditions of wind turbines under different operating conditions and to comprehensively assess the impact of blades on the performance of wind turbines, rigid and flexible blades are considered, which are found to be significantly different through the comparative analysis of the flow form of the tip fluid [
4]. It was found that considering the blade as a rigid body can no longer meet the wind turbine design requirements, driving the development of the blade from being assumed as a rigid body to a complex, real, flexible body [
5]. Under this condition, the CFD simulation of wind turbine operation under various conditions found that wind turbine blade deformation has a significant effect on the aerodynamic performance, and the blade deformation leads to a change in the vortex trajectory at the tip of the blade [
6], which mainly changes the vortex’s normal direction, thus changing the boundary conditions of the vortex model, leading to a slightly different distribution of the circulating currents along the span [
7], and also delaying the location of the initiating vortex [
8]. The aerodynamic performance of a wind turbine is closely linked to the loads, and understanding the changes in the aerodynamic performance of a wind turbine after blade deformation requires the application of loads to the blade to produce deformation, and the contribution of inertial loads to the blade deformation is higher relative to the contribution of aerodynamic loads [
9].
Even though numerical simulation can study the working condition of wind turbines after blade deformation, which has the advantages of convenience and low cost of measurement, the numerical simulation is carried out in an ideal state, which is quite different from the actual working complex environment of a wind turbine, so the numerical simulation results have a big difference with the actual operation. Some scholars use experimental methods to study the deformation of the blade under different forces. If the blade is in the state of a cantilever beam with one end fixed and one end free, the blade is divided into seven nodes from the root of the blade and loaded with a determined load on six loading surfaces, and the difference between the displacement of each cross-section and the initial distance of the relevant cross-section is obtained, that is, the deformation of the blade under the load [
10]. To understand the stress–strain situation suffered by different parts of the blade, strain sensors were arranged on the surface of the wooden blade, and hammering experiments were carried out at 26 locations on the blade, which in turn yielded the relationship between blade strain and deformation [
11]. Applying external loads to the blade, also fixing one end of the blade, applying four different strengths of backward tension in the direction of blade waving to simulate the wind turbine blade under different flexure conditions, and using LiDAR technology to capture the blade displacement to obtain the blade deformation [
12]. However, the blade is usually subjected to complex loads in practice, such as dynamic loads, non-uniform loads, and other common effects, and the load in the laboratory is relatively single, so it is difficult to accurately describe the dynamic deformation produced by real complex load blades, resulting in the inability to comprehensively consider the deformation of the blade.
Consequently, it is necessary to monitor the dynamic deformation of wind turbine blades under actual working conditions. Through reviewing the literature, it is found that there are more experimental means to monitor the blade; for example, Zhang et al. [
13] developed a new technique of fine search based on affine transformation, which can directly calculate the rigid and elastic displacements caused by deformation, but it has not been applied in dynamic deformation experiments of wind turbine blades. Different experimental means are compared to find a suitable method. It is found that digital image correlation (DIC), as an optical video measurement method, realizes accurate measurement of blade deformation by high-speed continuous image acquisition of the blade surface and image matching and displacement field reconstruction using relevant algorithms. Carr et al. [
14], based on the theoretical method of the cantilever beam, built an experimental platform with one end of the blade fixed and one end movable, captured the static strain distribution of the blade using the DIC technique, and used the method for full-field surface dynamic measurement [
15]. These studies confirmed the effectiveness of the DIC method in monitoring wind turbine blade deformation, and the results provide a strong reference for subsequent blade optimization, wind turbine performance prediction, and wind farm layout.
However, the DIC fails when the measured object is rotating [
16,
17], making it difficult to apply the method to deformation measurements of some rotating research objects. To solve this problem, a DIC considering a rotational algorithm is proposed [
18], which can accurately obtain full-field deformation measurements of an object under the occurrence of an arbitrary rotational angle, overcoming the limitations of deformation measurements at large rotational angles, making the application of the DIC to wind turbine blade measurements a reality, and verifying its usability in wind turbine blade deformation experiments [
19]. Technology has the advantages of non-contact, comprehensiveness, and high accuracy, which can provide detailed blade deformation information and can be used to conduct three-dimensional dynamic experiments on turbine blades [
20], which proves that the technology can monitor the dynamic deformation of the blades. Winstroth et al. [
21] used the DIC measurement method to obtain the deformation amount of the wind turbine blade and compared the results of the study with the results of numerical simulation, which showed that DIC has great potential in blade condition monitoring. However, in the experiment, the blades were subdivided, and some of the areas were selected for monitoring, and the wind turbine blades were not globally monitored.
In this paper, a 3D digital image correlation (3D-DIC) algorithm is used to build a horizontal-axis wind turbine blade dynamic deformation measurement system in the wind tunnel opening section of the Key Laboratory of the Ministry of Education for Wind Energy and Solar Energy Utilization Technology (Inner Mongolia University of Technology) to monitor the distribution of three-dimensional displacements of blades with different elastic modulus to obtain the dynamic deformation of blades, and to explore the dynamic deformation law of wind turbines under different operating conditions. The dynamic deformation of the blade is obtained to explore the dynamic deformation law of the blade under different operating conditions of the wind turbine. The results of the study can provide valuable experimental data support for the structural design and improvement of wind turbine blades.
5. Conclusions
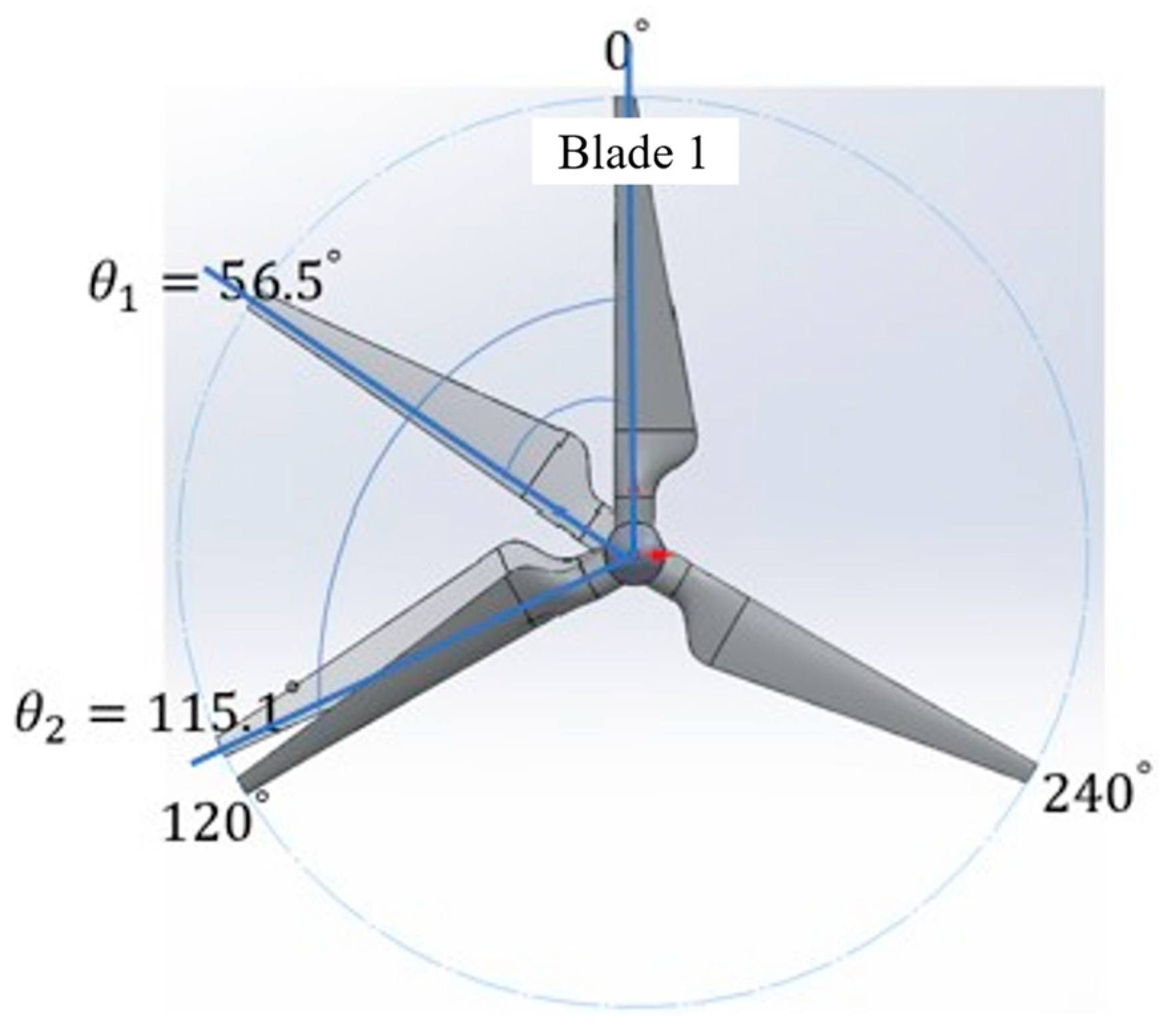
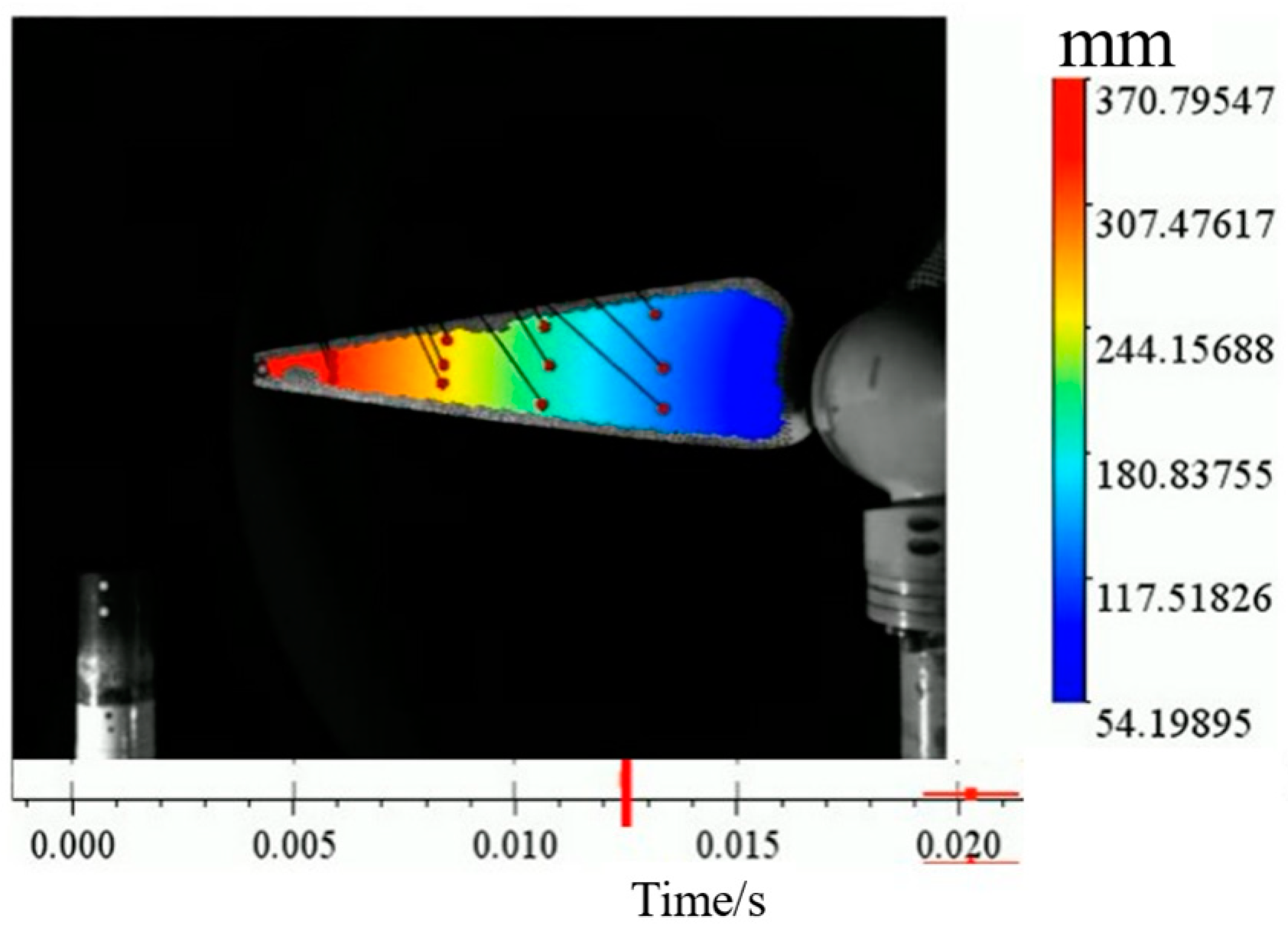
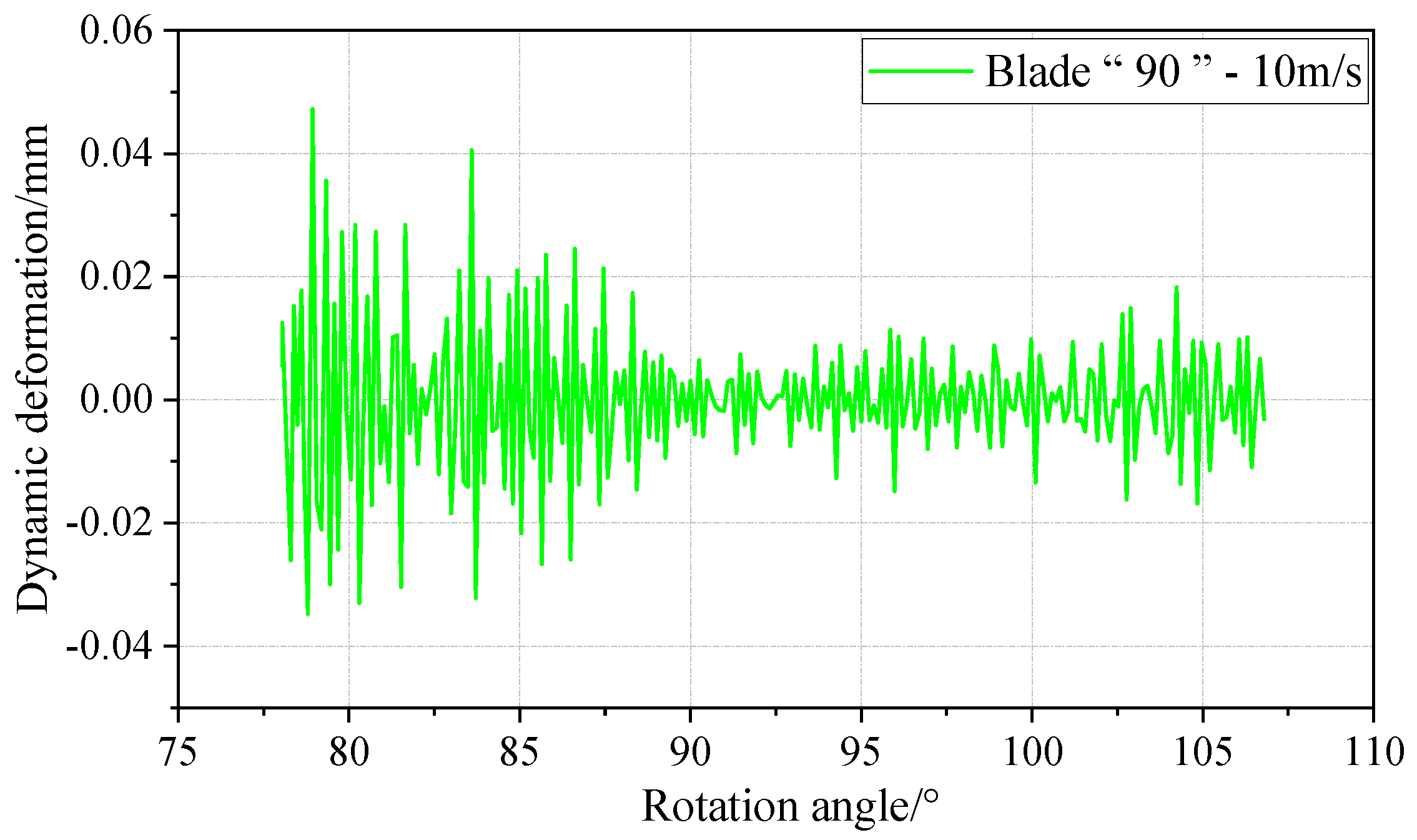
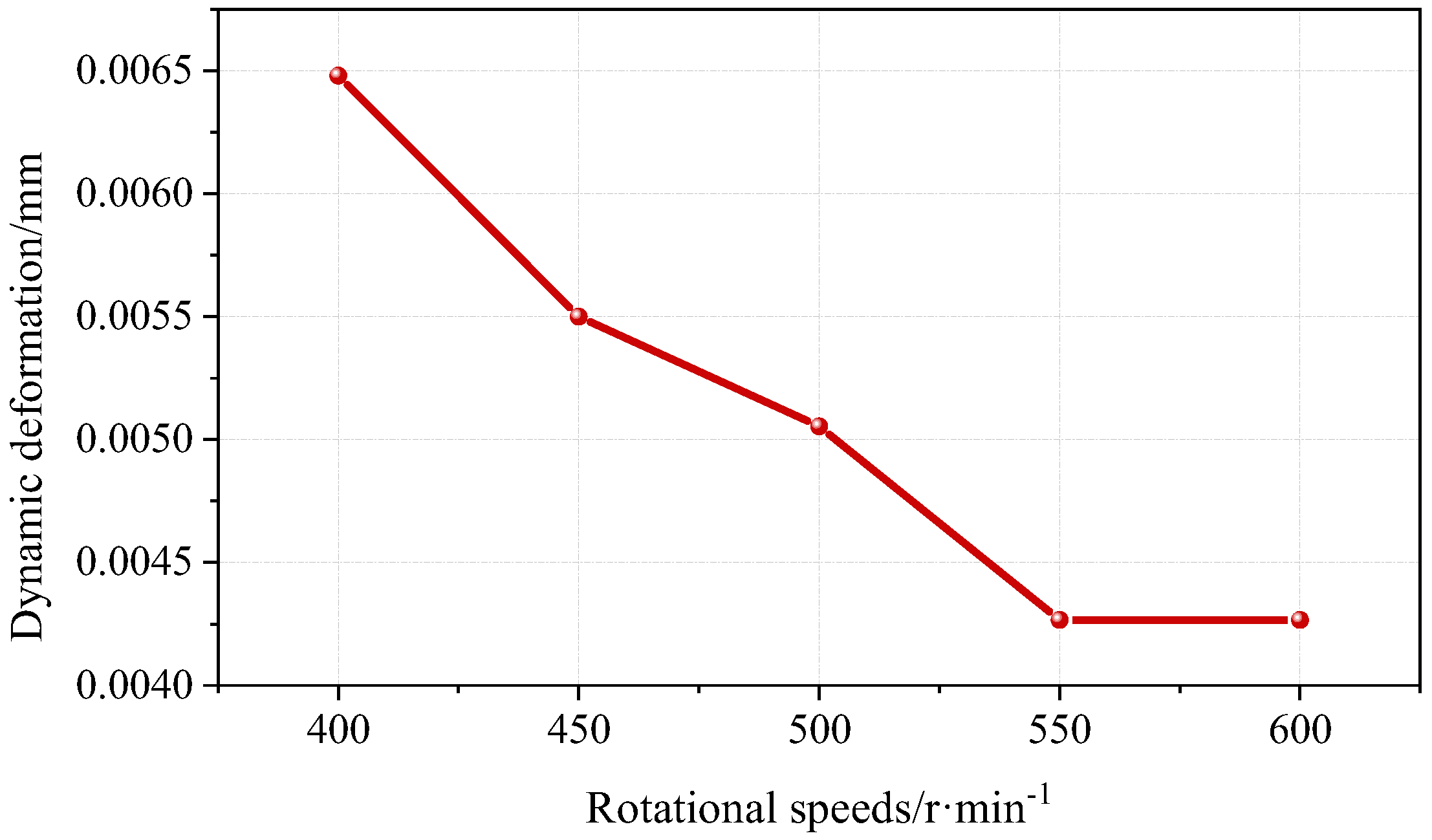
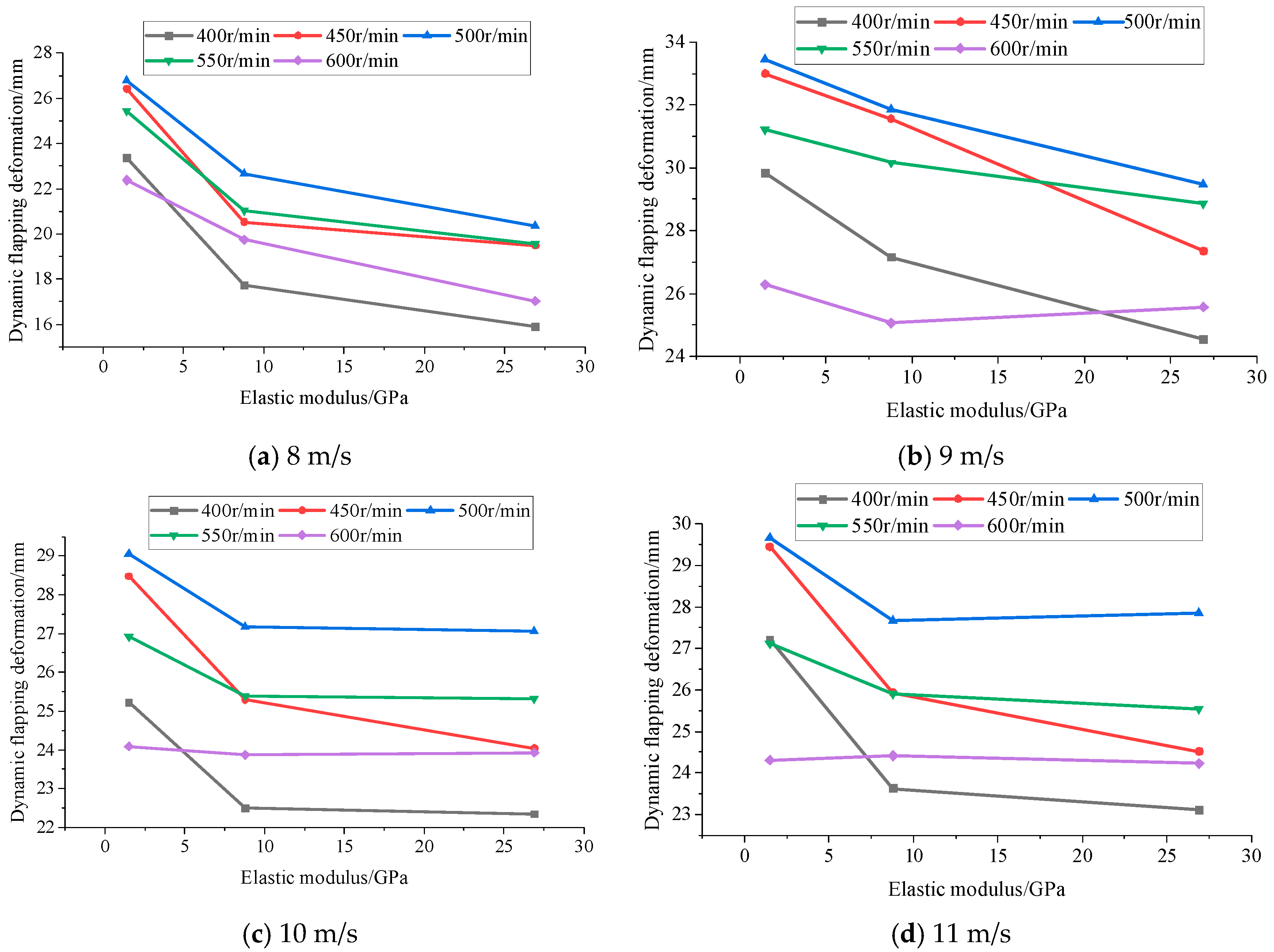
In this paper, an advanced three-dimensional digital image correlation (3D-DIC) algorithm is used to construct a dynamic deformation measurement system for horizontal-axis wind turbine blades in the opening section of the wind tunnel at the Key Laboratory of the Ministry of Education for Wind and Solar Energy Utilization Technology (Inner Mongolia University of Technology), and the applicability of the method for wind turbine blade deformation measurements is explored. Considering the calibration accuracy of the camera system on the blade during the blade measurement process and the possible failure of the relevant algorithm under large rotation conditions, the reliability of the method was verified through experiments, and a 3D-DIC-based dynamic measurement system for wind turbine blades was developed. Measurement of the full-field displacement distribution of wind turbine blades during the working process from the rotation angle θ1 = 56.5° to θ2 = 115° was realized, and the dynamic waving deformation of the wind turbine blades was obtained. The influence of different independent variable factors on the dynamic deformation amount and dynamic waving deformation amount of wind turbine blades with different elastic moduli was found. With the increase in rotational speed, the dynamic waving deformation of the wind turbine blades shows a tendency to increase and then decrease, and the maximum deformation occurs in the range of 450 r/min to 550 r/min. With the increase in wind speed, the dynamic waving deformation of the wind turbine blades shows a tendency to increase and then decrease, and the maximum deformation occurs in the wind speed range of 9 m/s and a rotational speed of 550 r/min. With the increase in elastic modulus of the wind turbine blade, the dynamic swinging deformation of the wind turbine blade shows a tendency to decrease gradually, and the degree of decrease is reduced. The mathematical formula for calculating the blade deformation was also obtained, which can predict the volume of the blade under different operating conditions.
Although the influence of the blade’s structural elastic modulus on the blade dynamic deformation volume obtained from the analysis before designing the experiment in this paper is small, its influence is large in the experiment; subsequent research needs to investigate the structural elastic modulus. In this experiment, the dynamic swing deformation of the wind turbine blade was measured and analyzed; however, the deformation of the wind turbine blade has torsion and oscillation deformation in addition to dynamic swing deformation. Although small and neglected in this experimental study, the deformation is still large in the actual deformation of large wind turbine blades, so it is also necessary to study larger wind turbine blades.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}