
Cooperative Control Strategy for Power Quality Based on Heterogeneous Inverter Parallel System



Abstract
1. Introduction
2. Constitution of the Parallel System
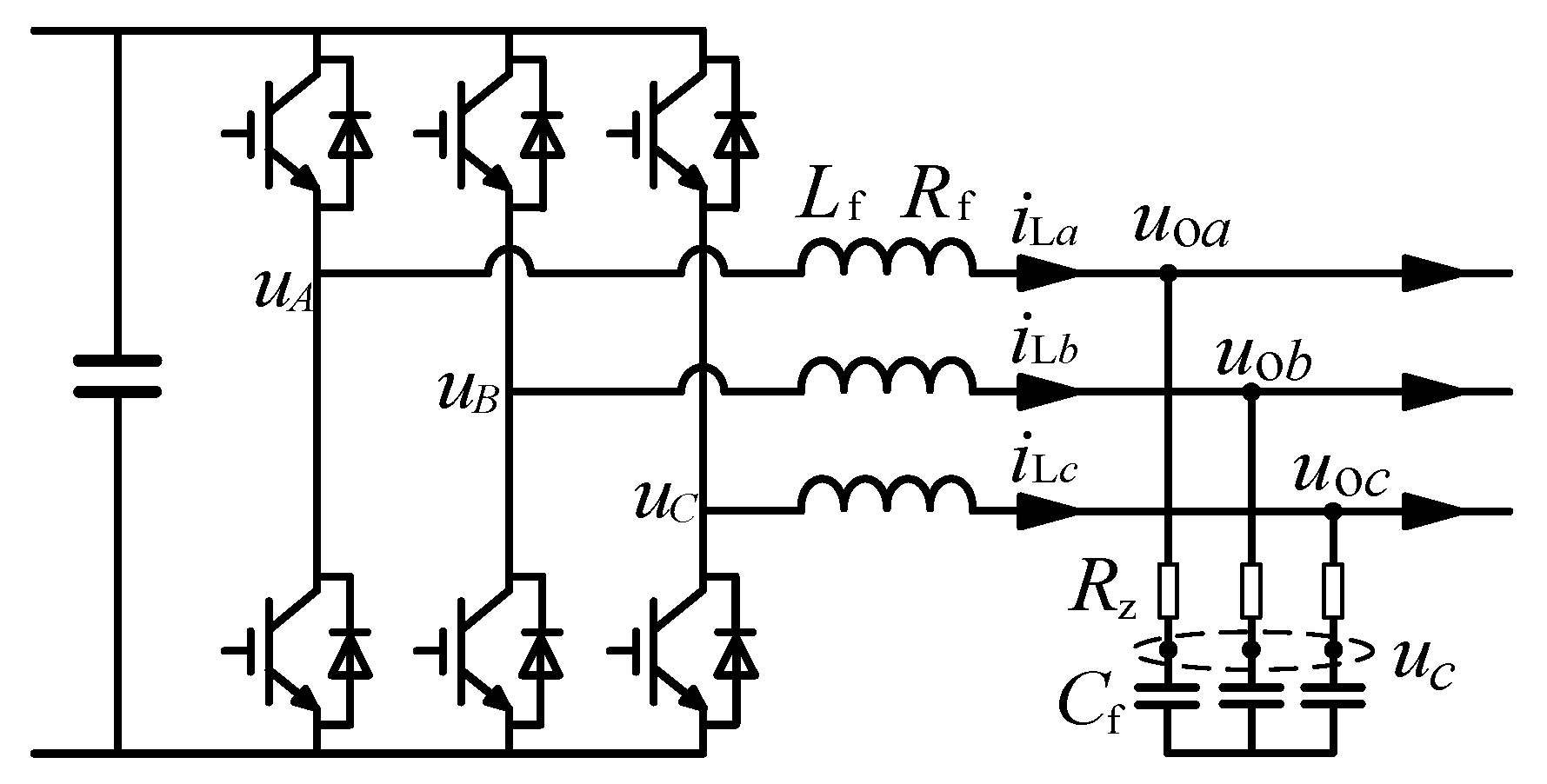
2.1. Topology and Modeling of the Inverters
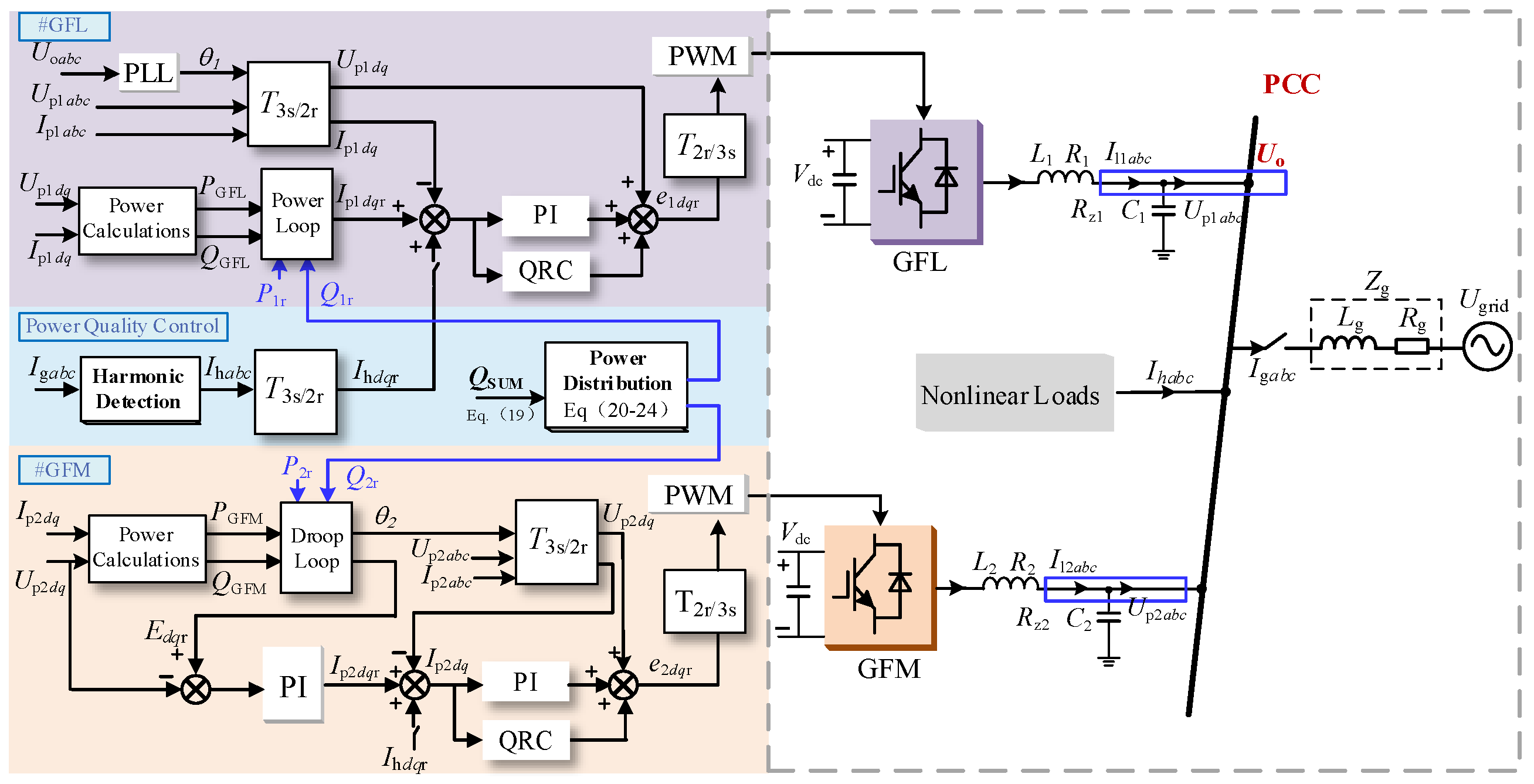
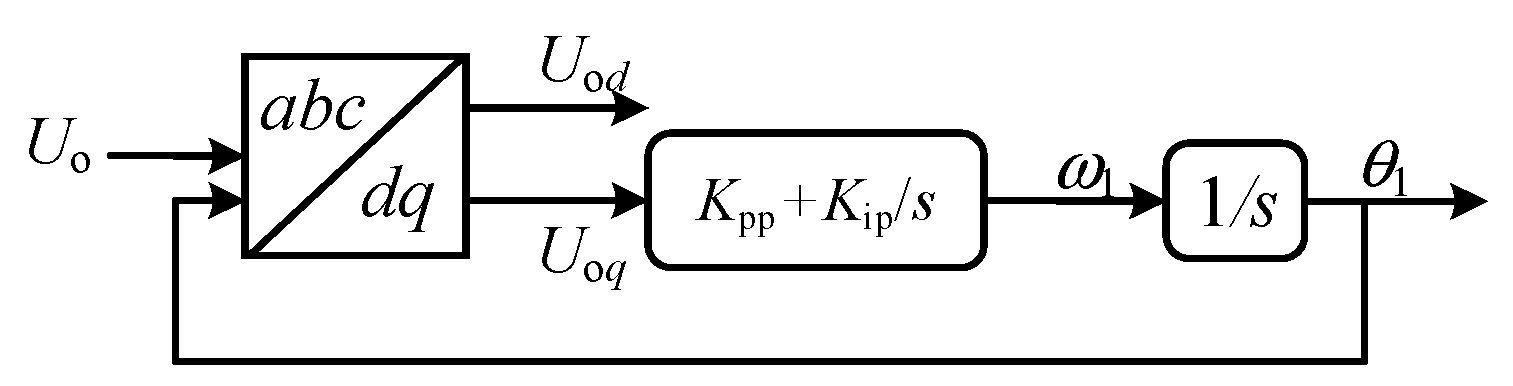
2.2. Structure and Basic Control Strategy of Parallel System
3. Harmonic Suppression Strategy
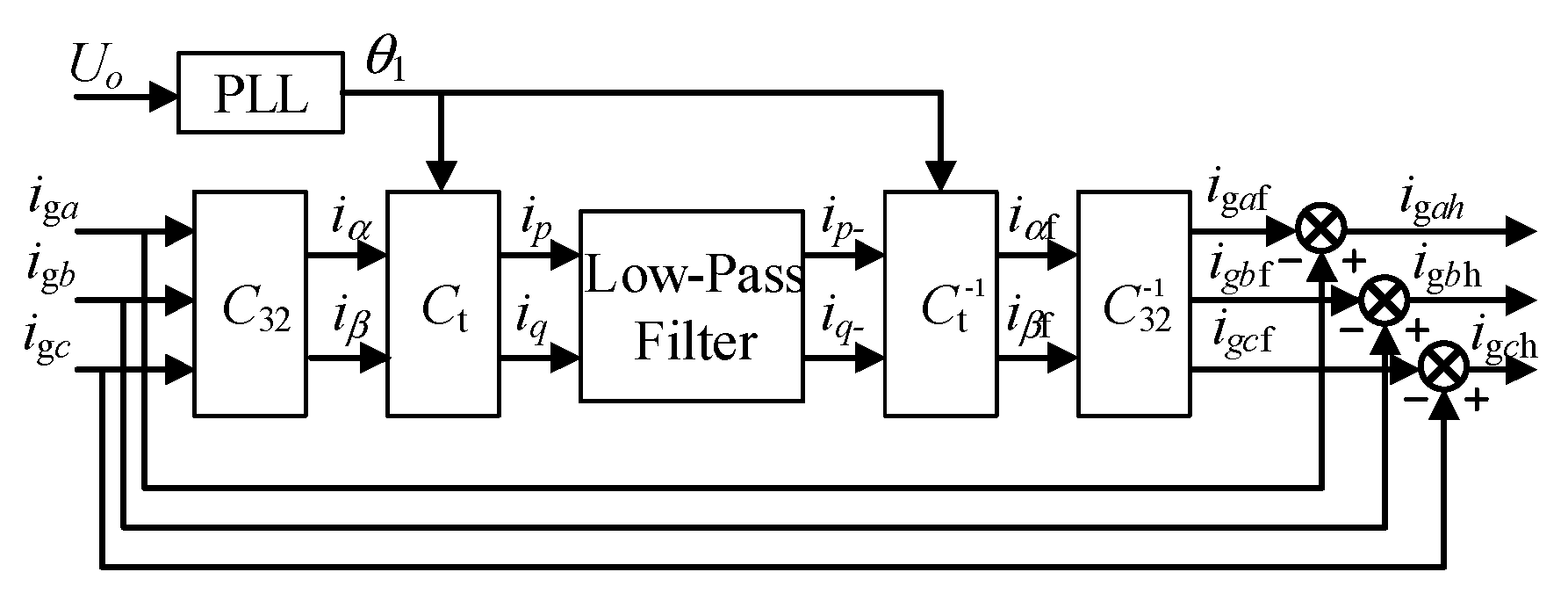
3.1. Detection of Harmonic Current
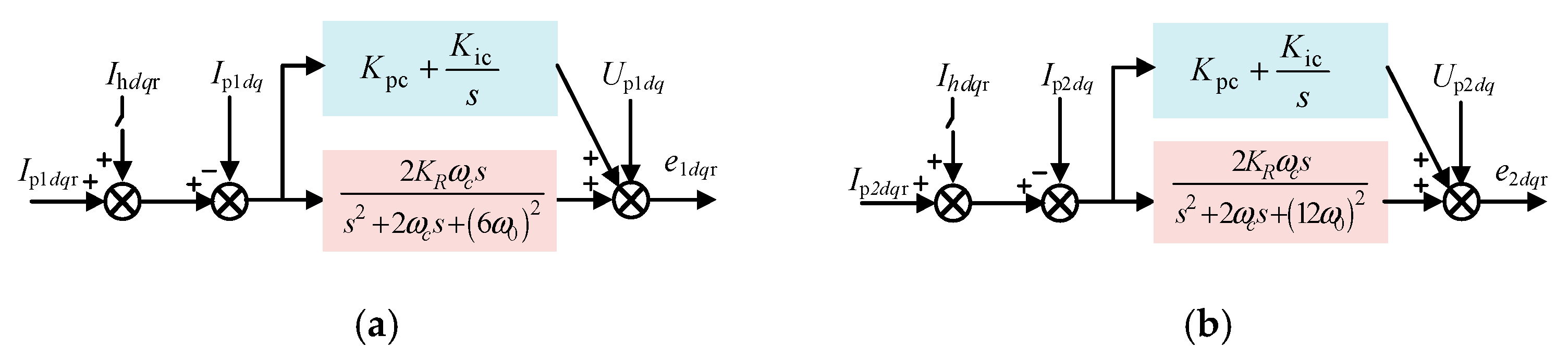
3.2. Tracking and Harmonic Current Allocation of Composite Commands
4. Cooperative Control Strategy for Voltage Support
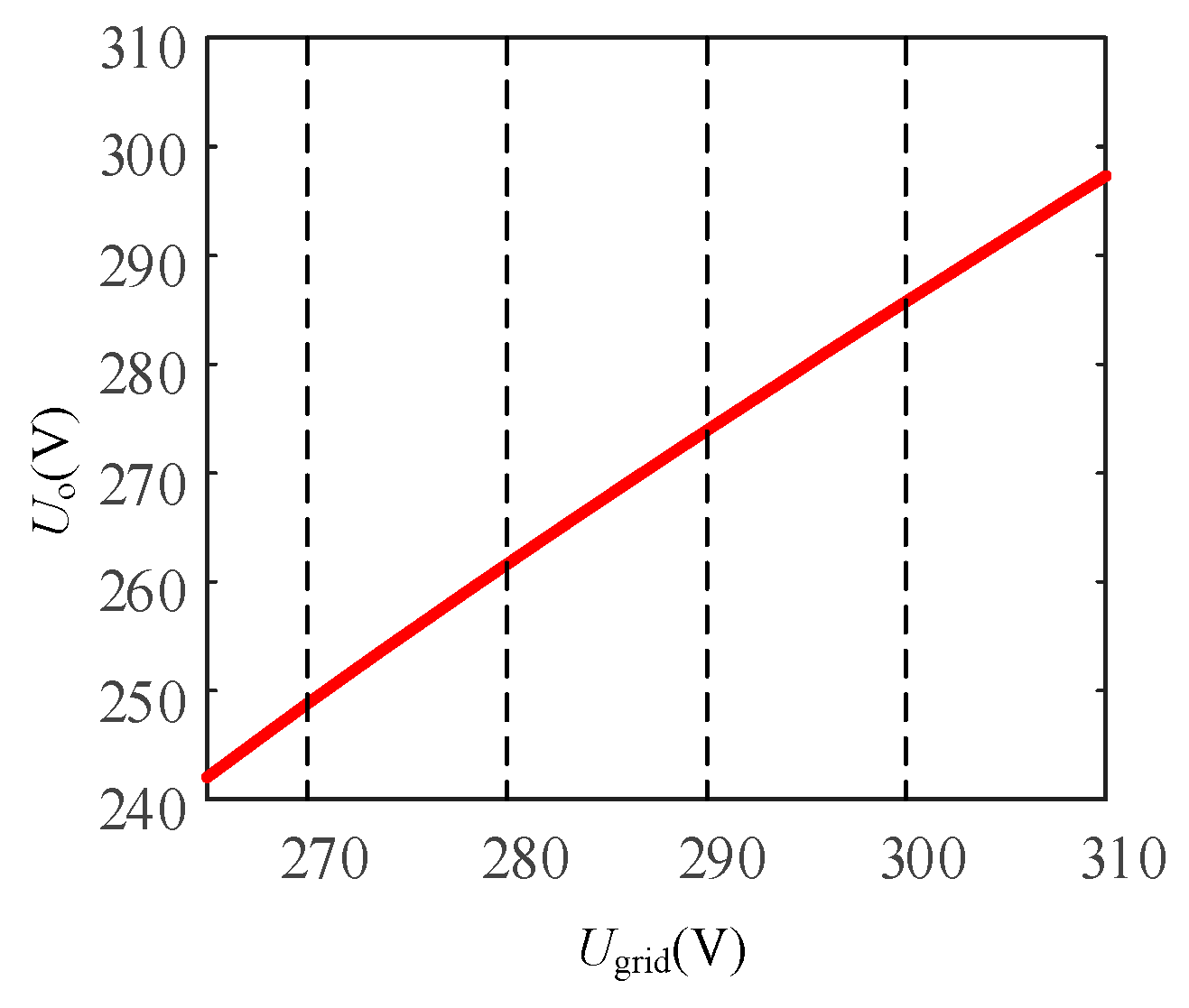
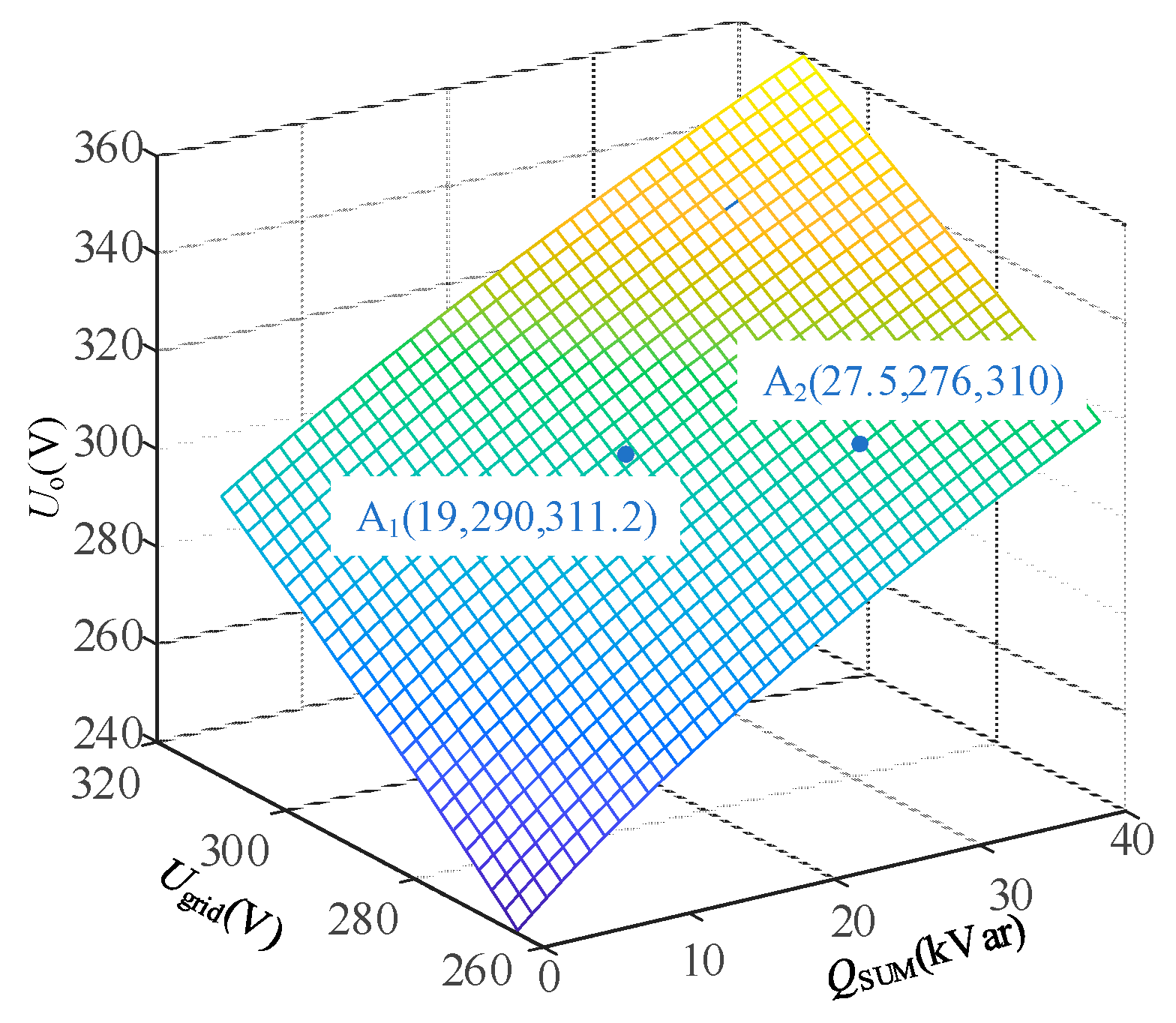
4.1. Power Transmission Characteristics of the Parallel System
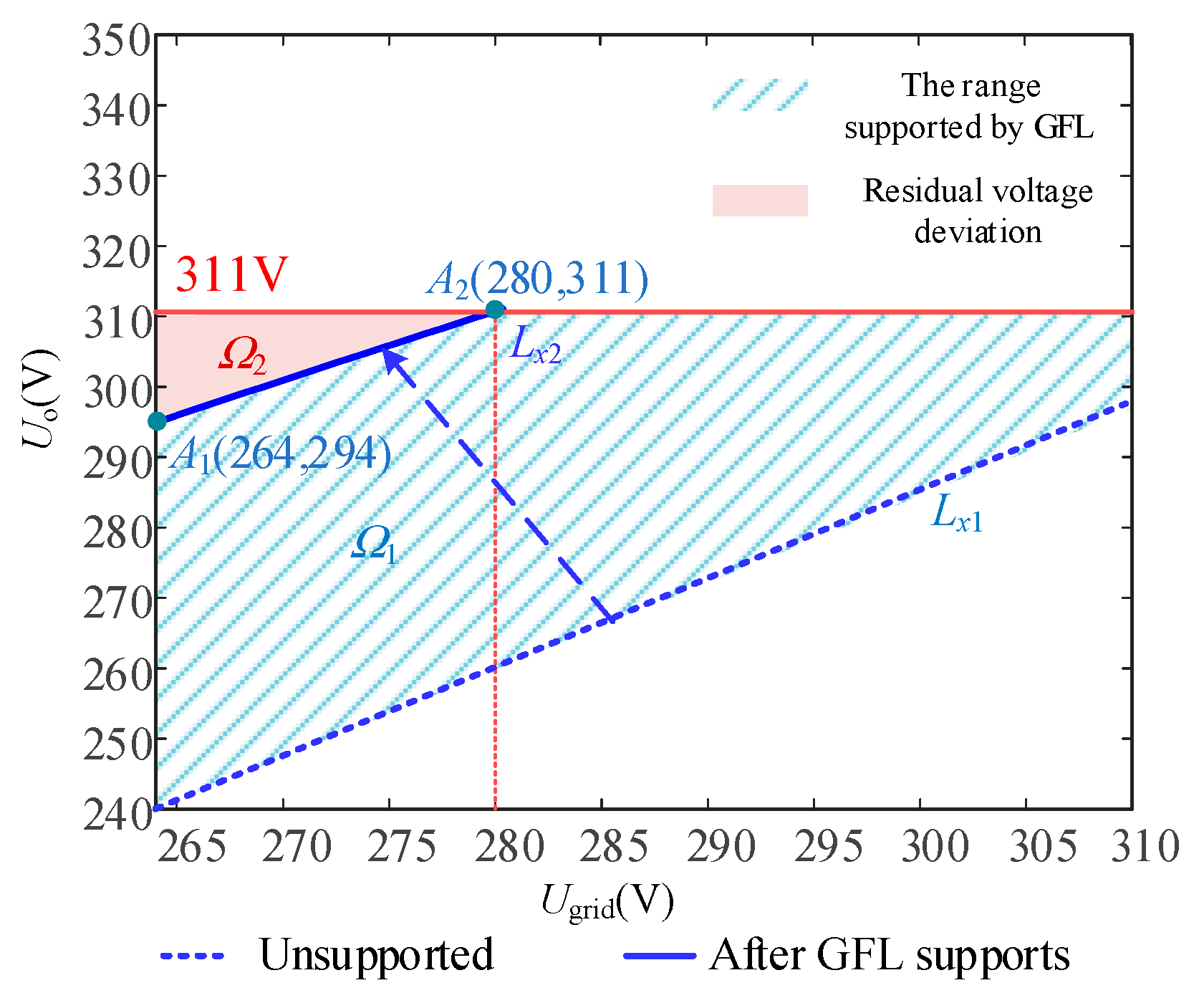
4.2. Analysis of Voltage Support Conditions in the Parallel System
4.2.1. Operating Condition Where Only the GFL Inverter Supports Voltage
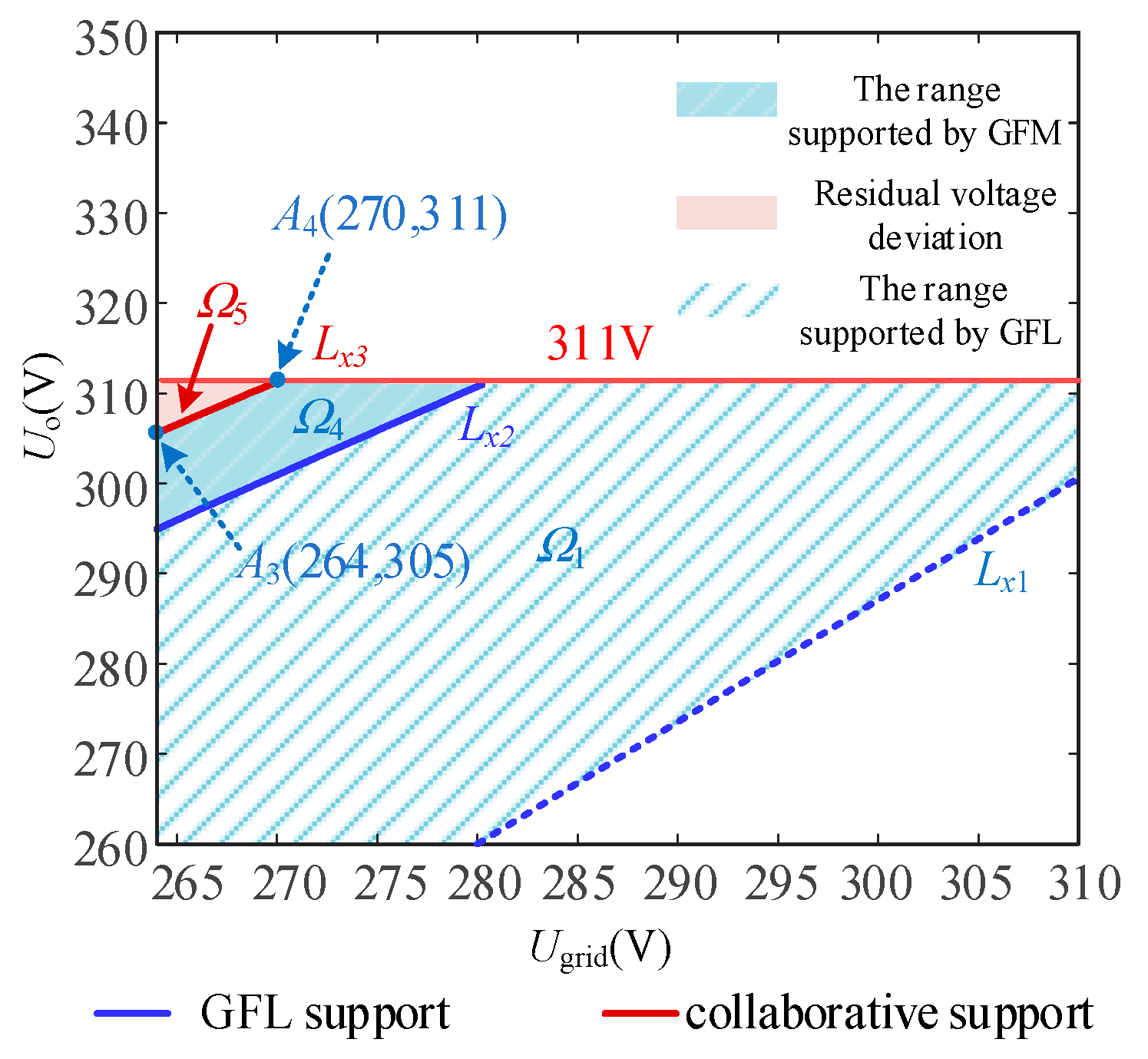
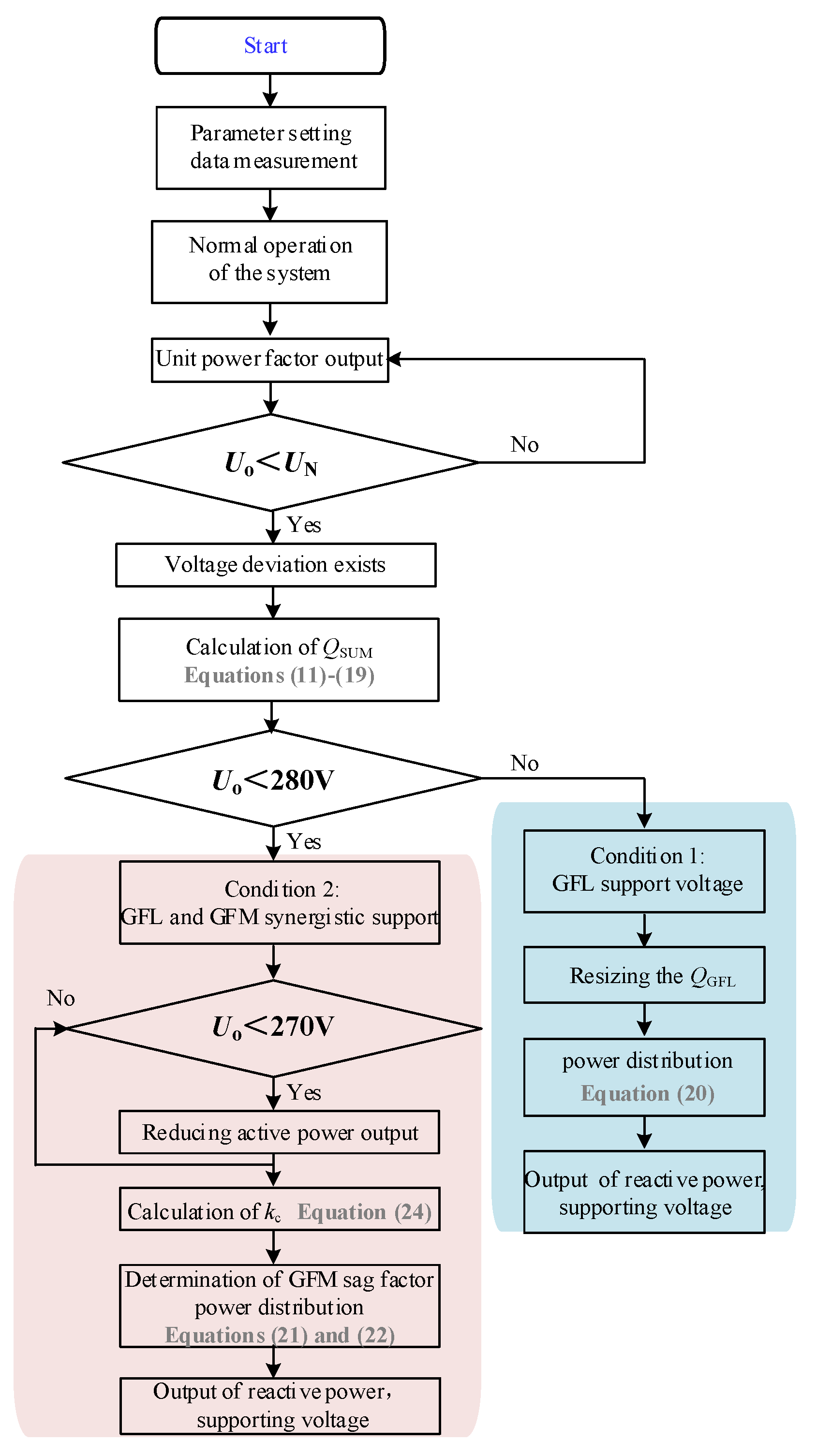
4.2.2. Operating Condition Where Both GFL and GFM Inverters Support Voltage
5. Simulation Verification
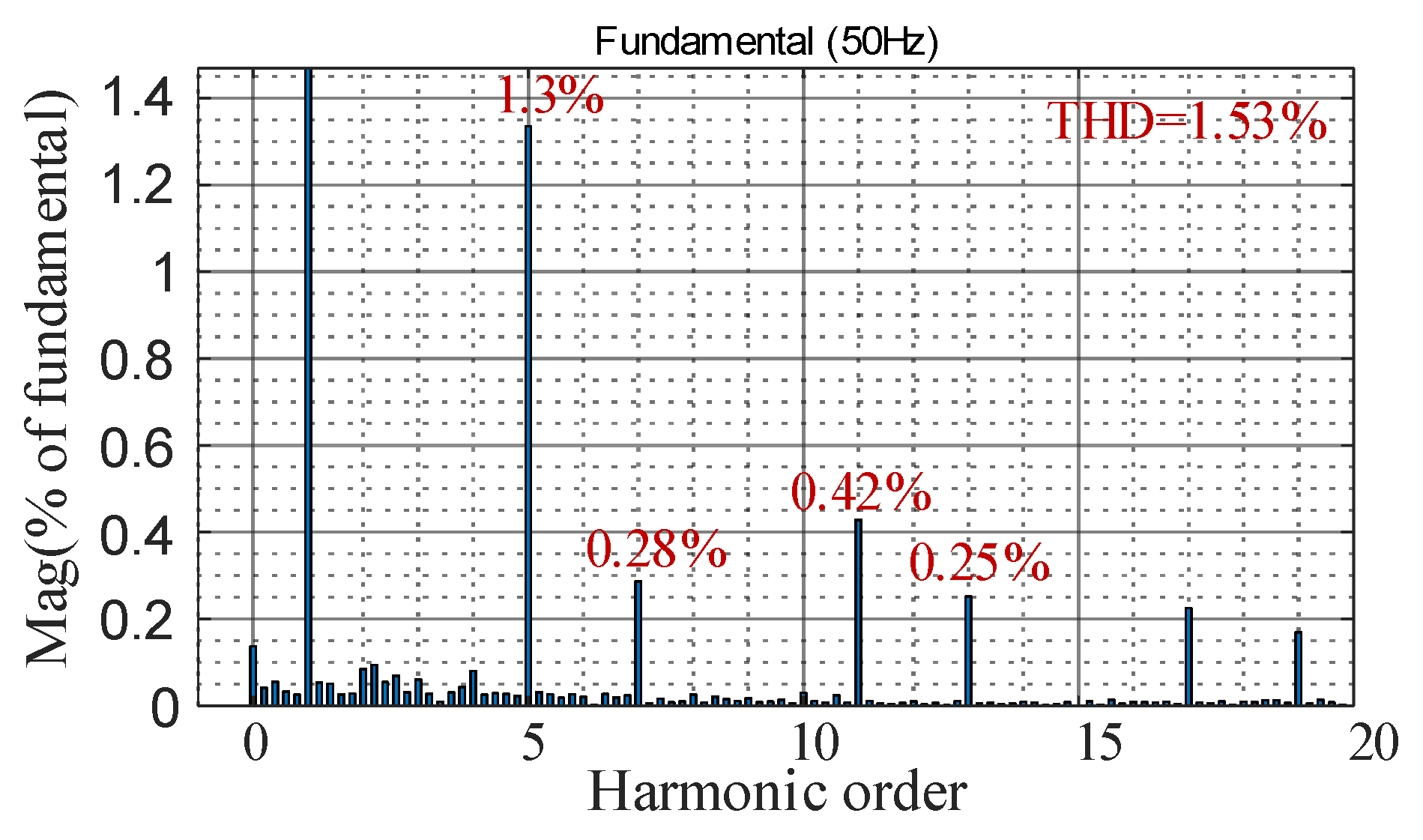
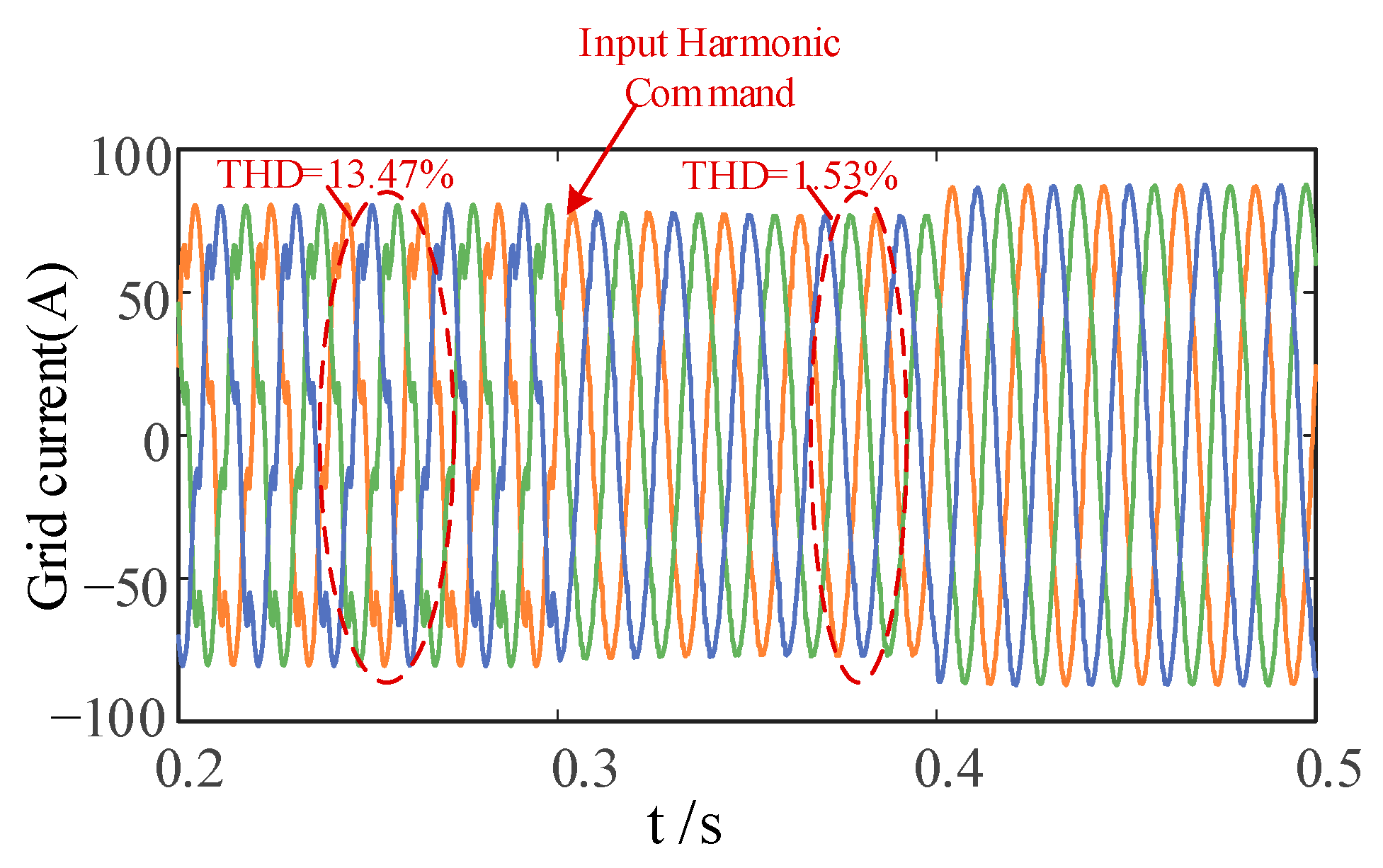
5.1. Simulation Validation of Harmonic Suppression
5.2. Simulation Verification of Voltage Cooperative Support
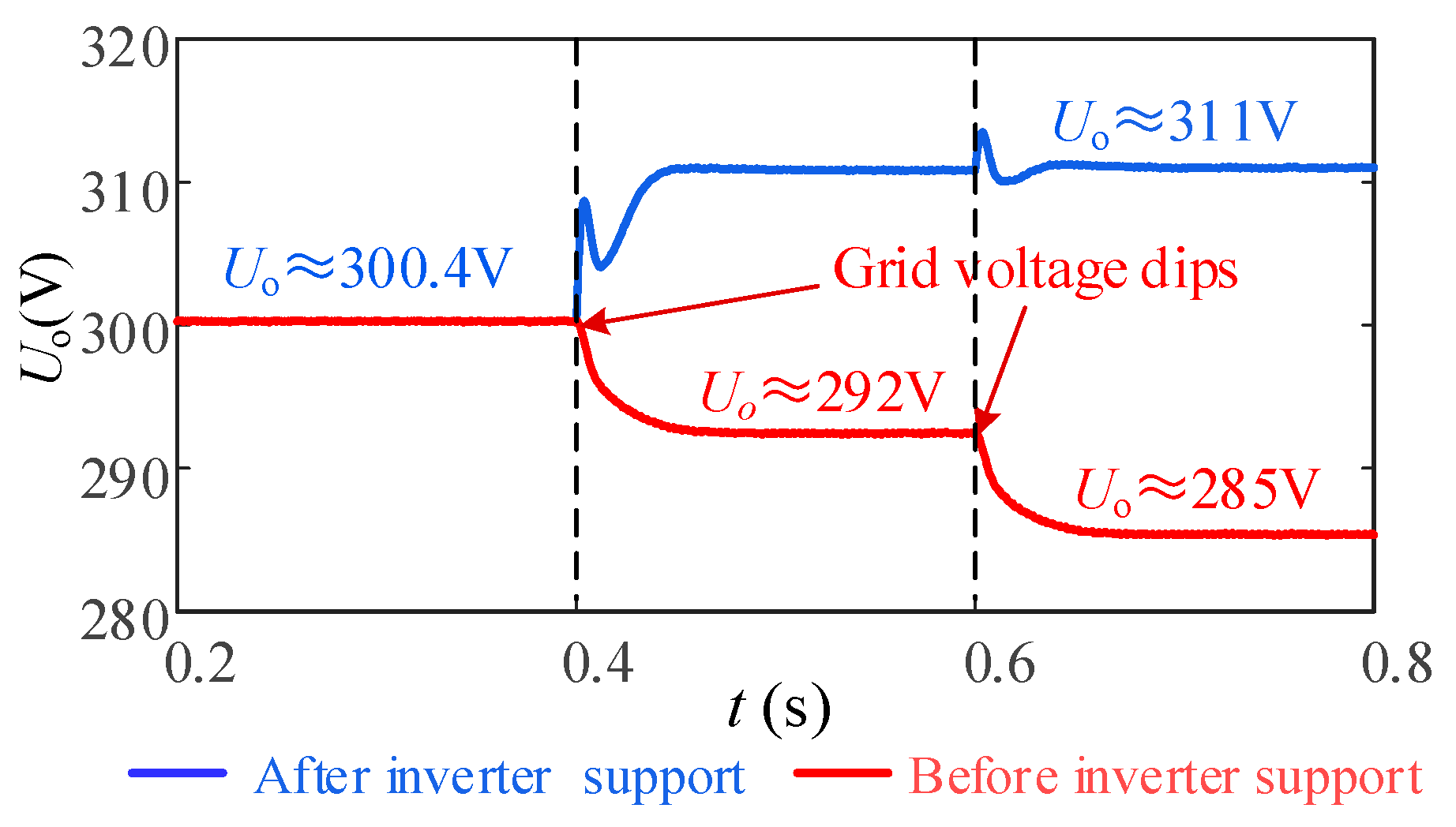
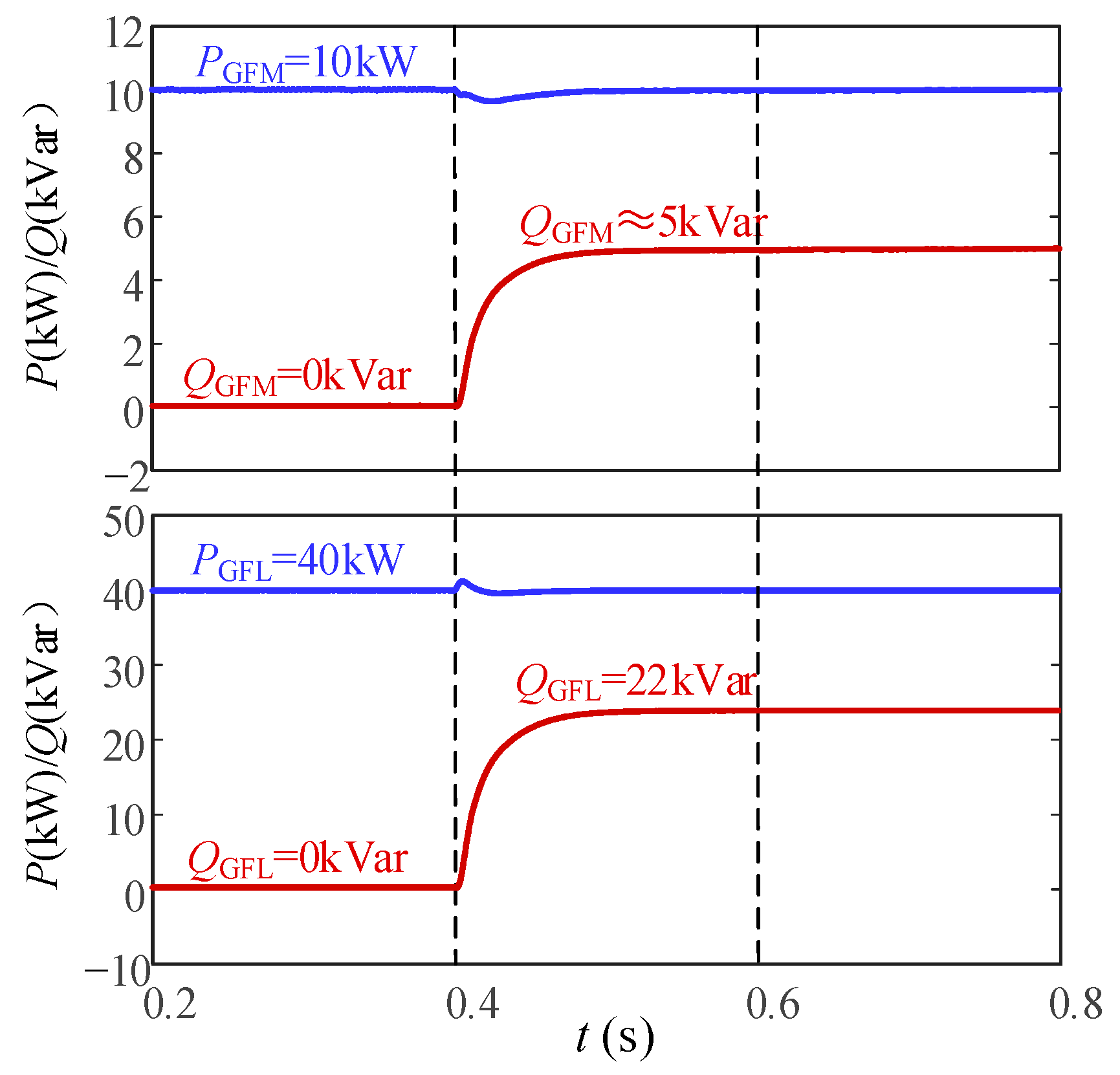
5.2.1. Condition Where Only the GFL Inverter Supports Voltage
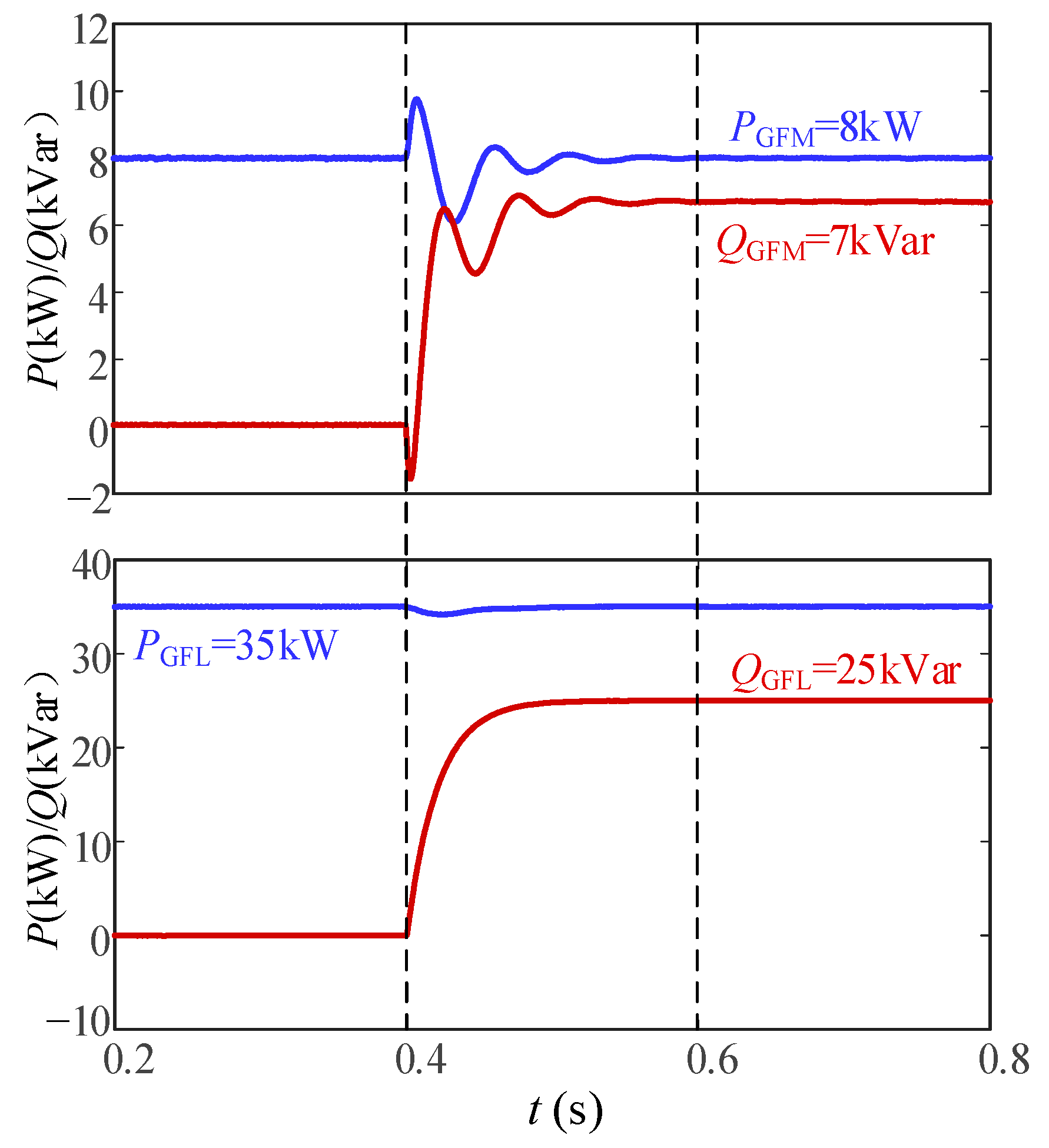
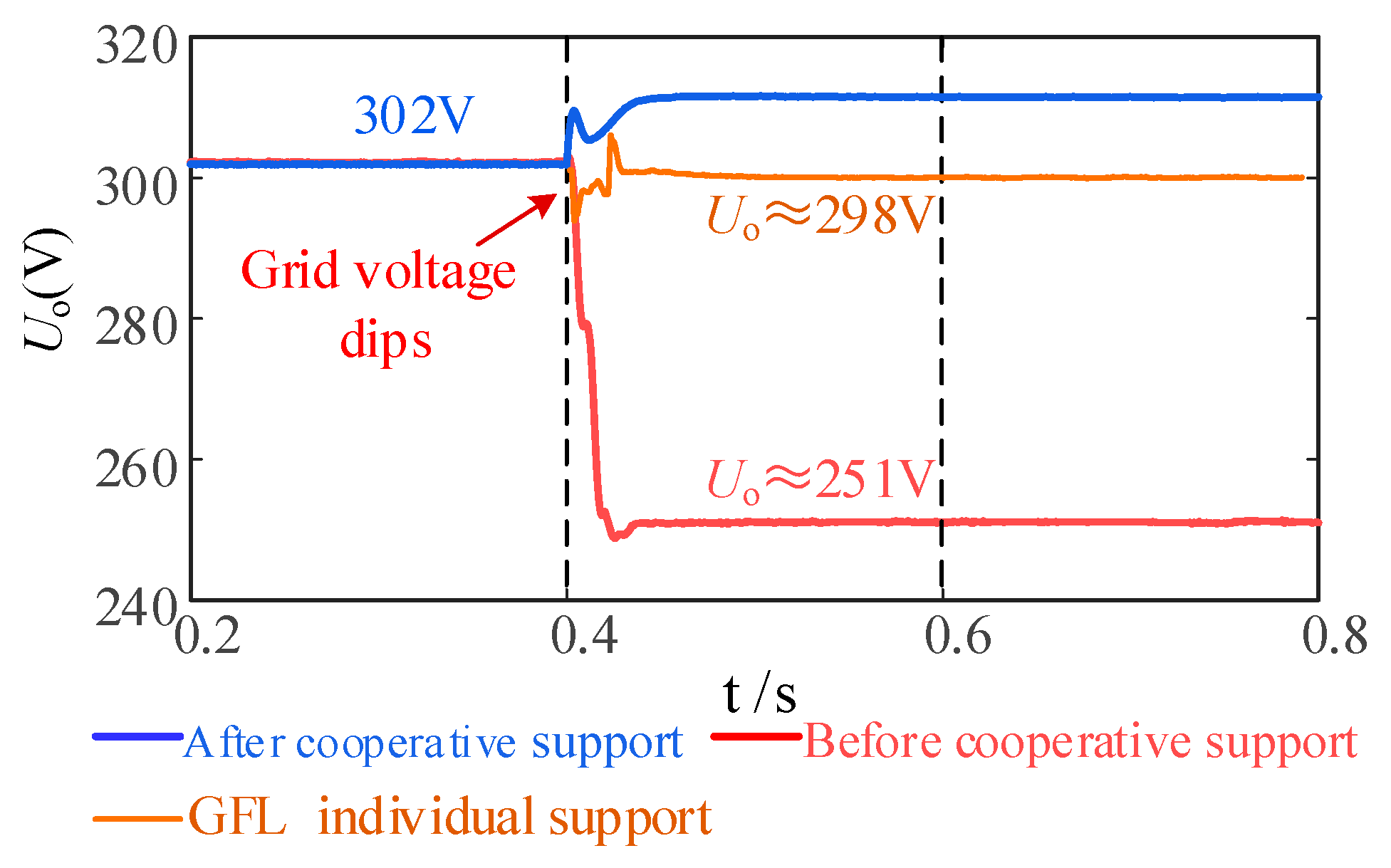
5.2.2. Conditions Where Voltage Is Supported by GFL and GFM Inverters in Concert
6. Experimental Verification
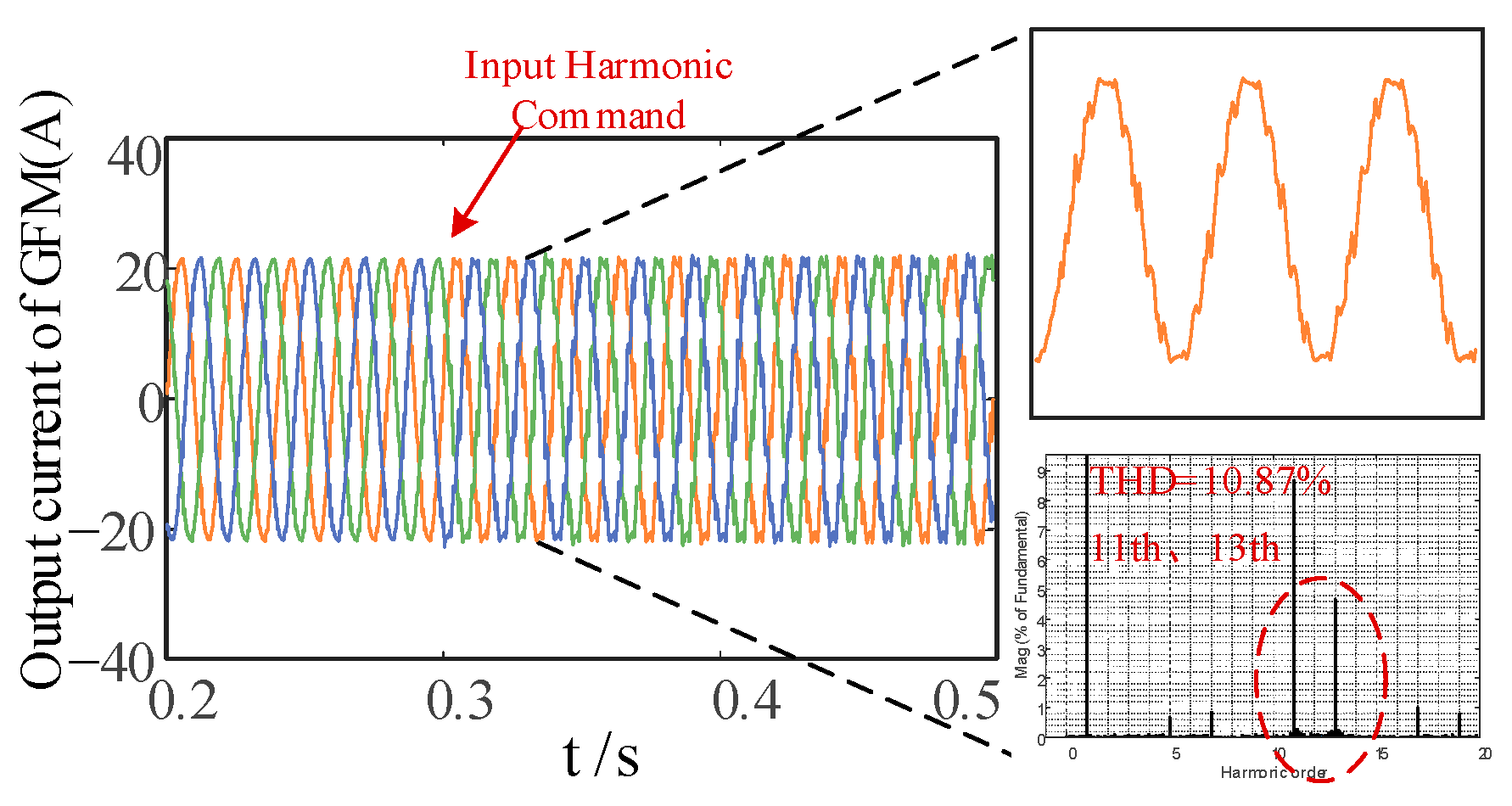
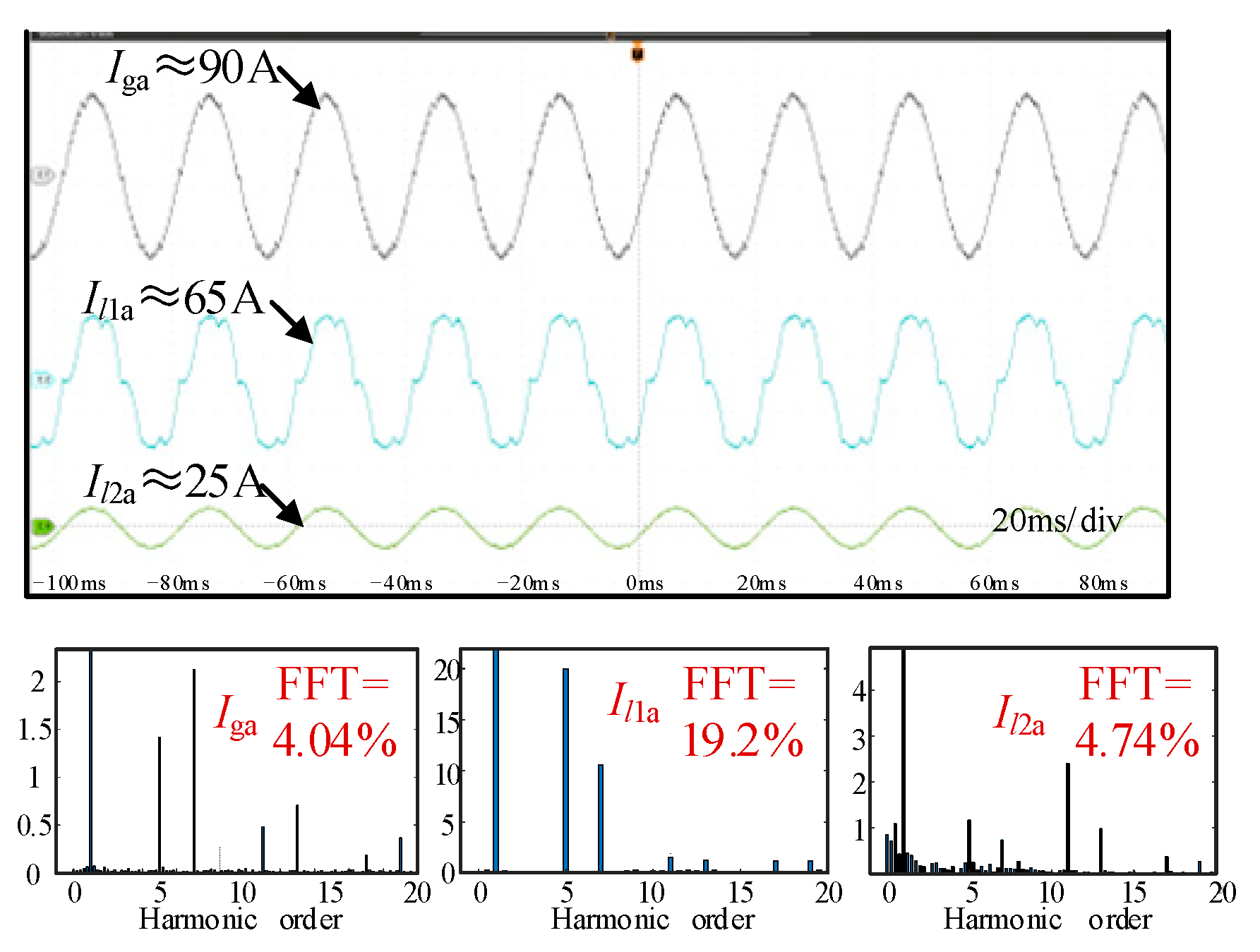
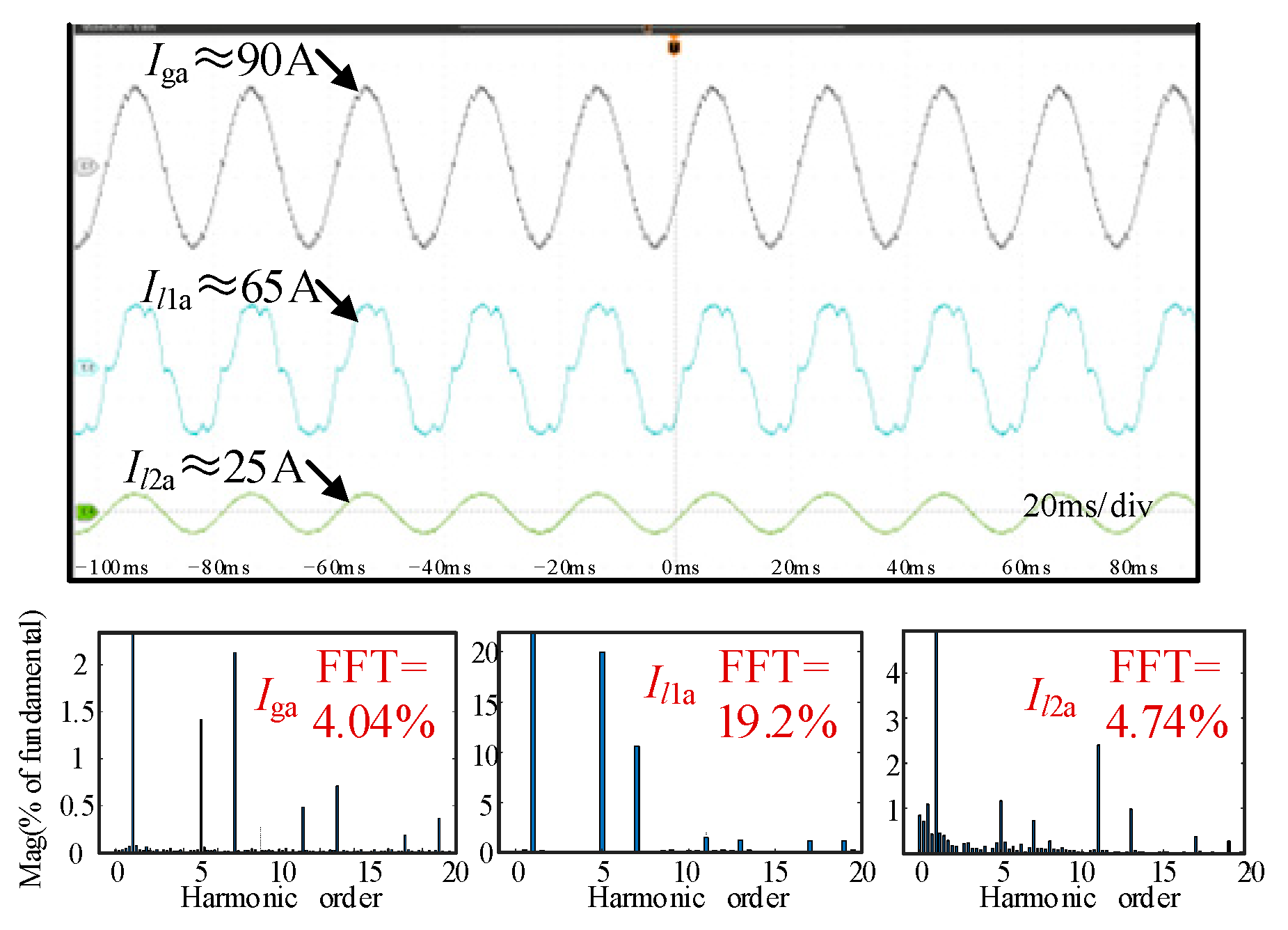
6.1. Experimental Verification of Harmonic Suppression
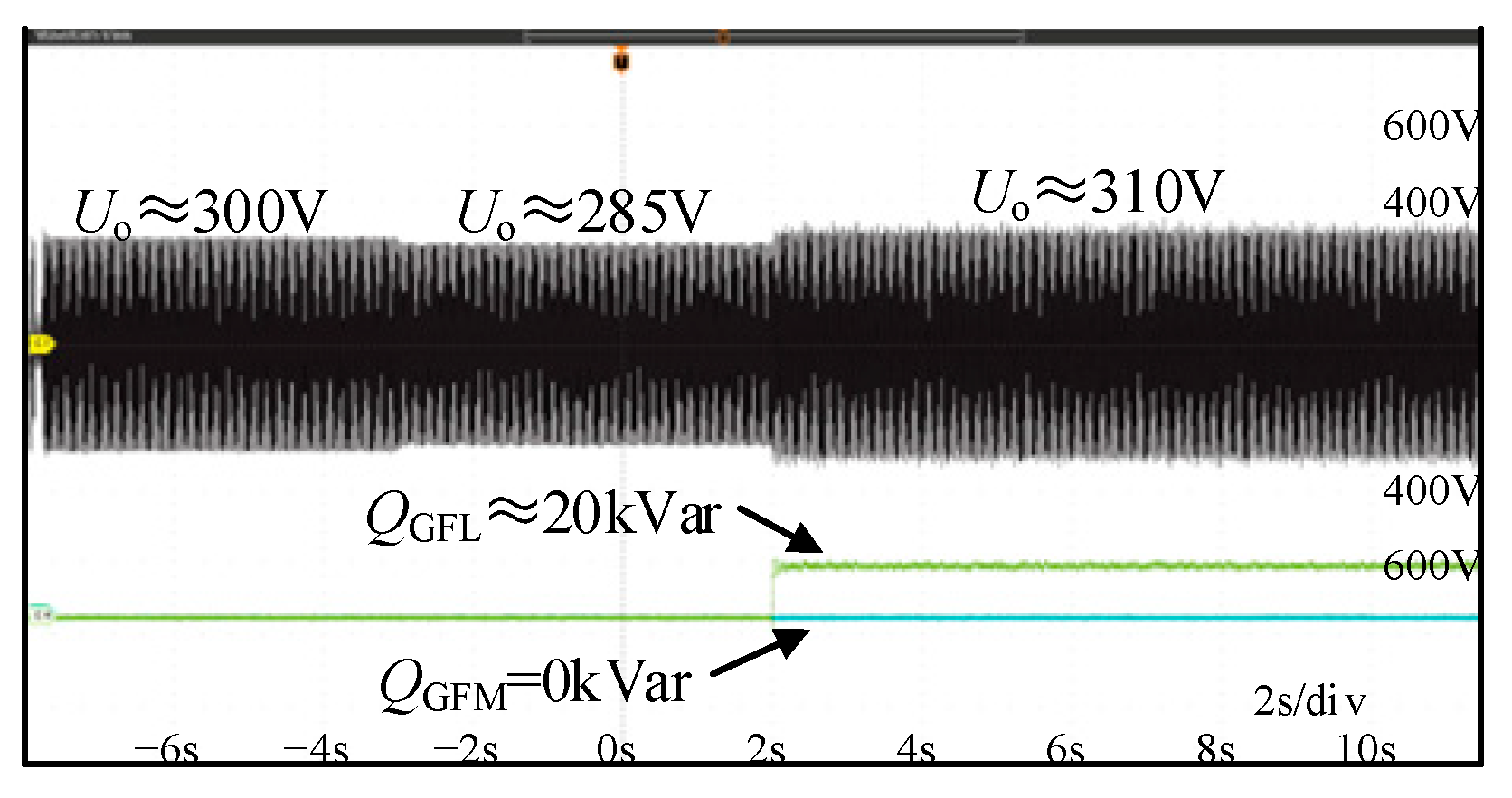
6.2. Experimental Verification of Voltage Cooperative Support
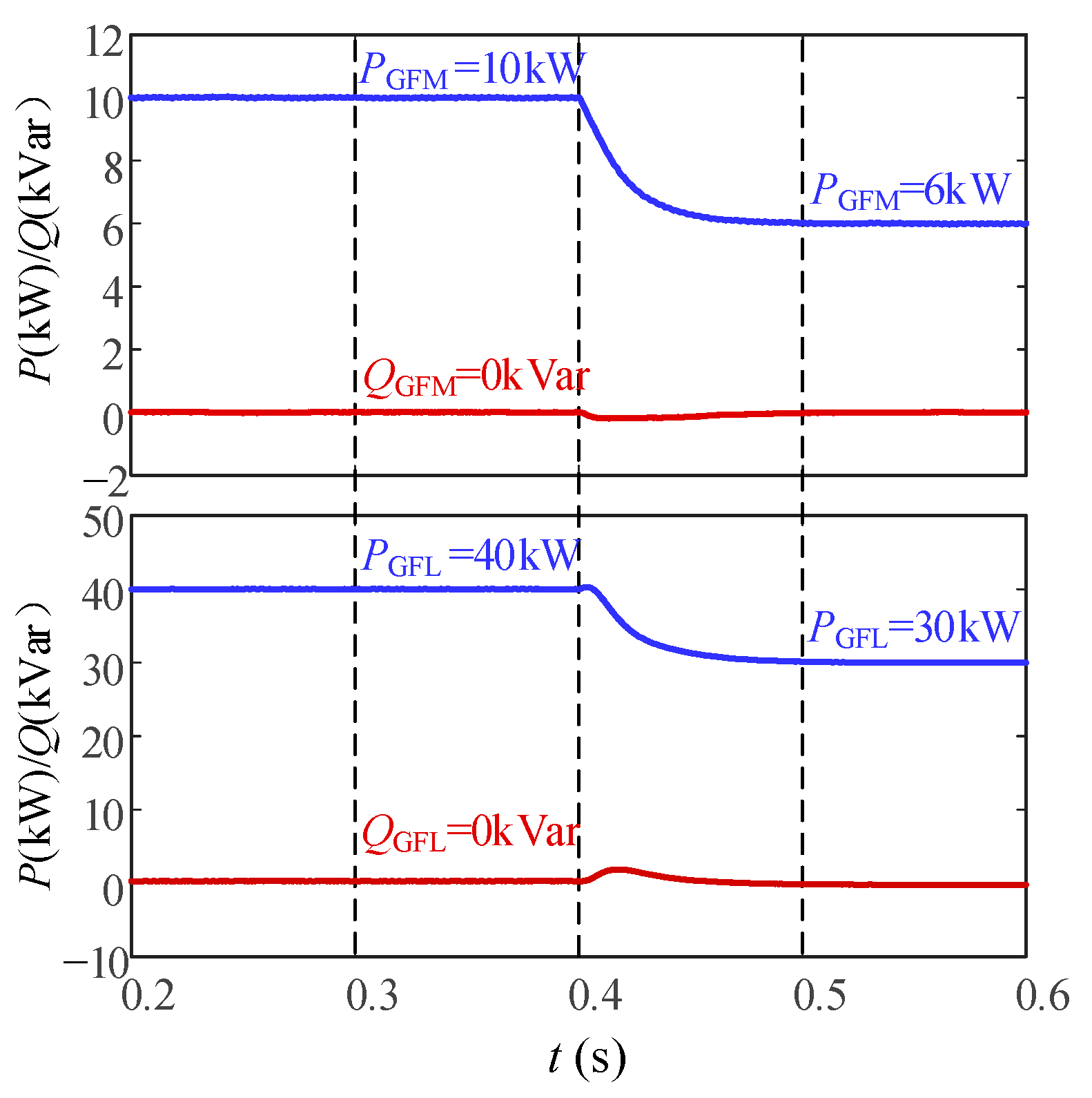
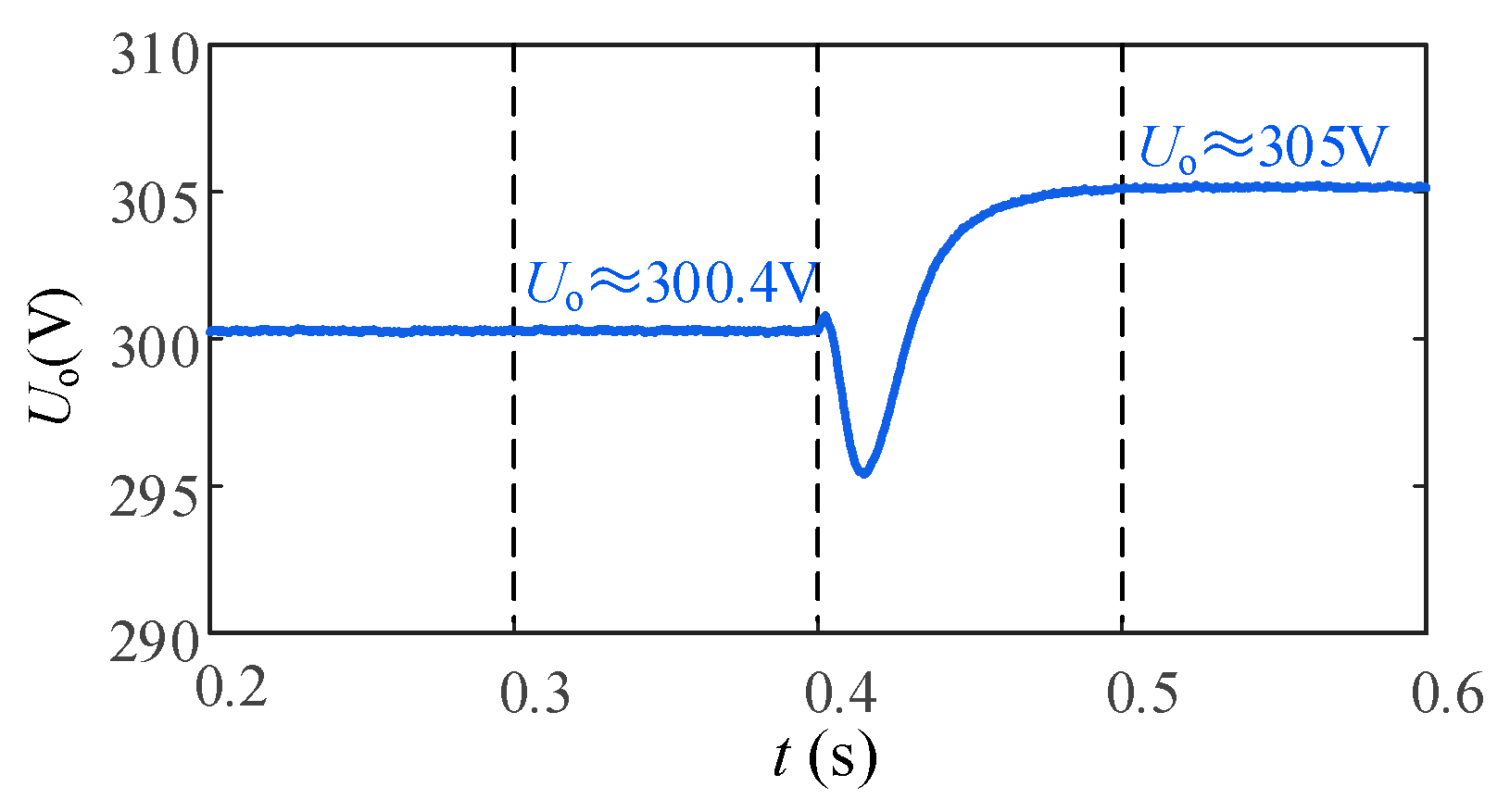
6.2.1. Working Condition Where Only the GFL Inverter Supports Voltage
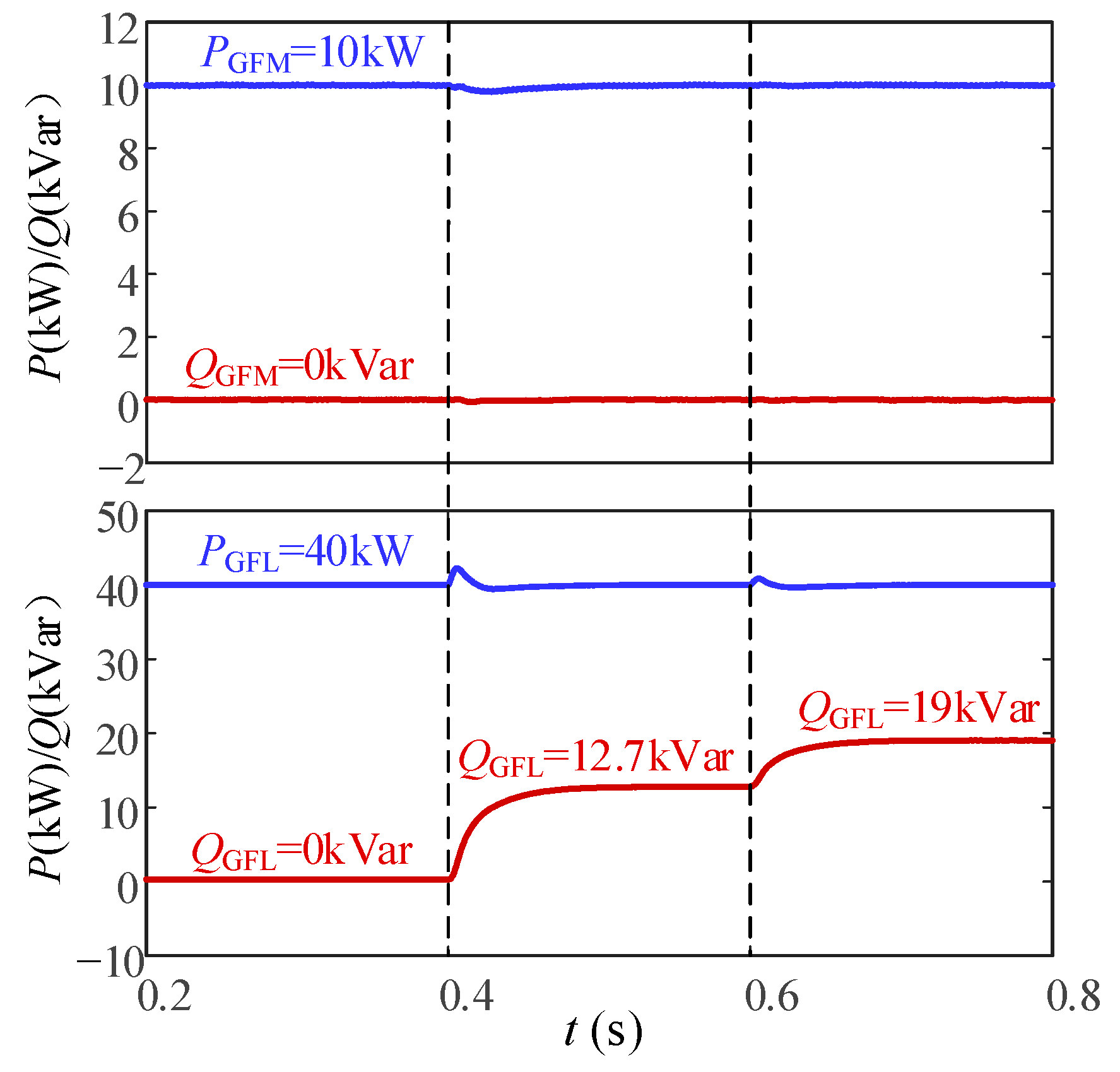
6.2.2. Condition Where Voltage Is Supported by GFL and GFM Inverters in Concert
7. Conclusions
- With the introduction of large-scale renewable energy sources, power electronics has become an important feature of modern power systems. GFL and GFM inverters in parallel are the trend of the future due to their ability to satisfy both customer and system requirements in terms of voltage/frequency regulation and power quality.
- In this paper, the characteristics of GFL and GFM inverters are fully utilized. While ensuring power transmission, the remaining capacity is fully utilized to carry out the auxiliary control of power quality problems such as harmonic problems and voltage deviation. A harmonic allocation control strategy based on QRC is proposed, which can effectively control and allocate the 5th, 7th, 11th, and 13th harmonics. A coordinated control strategy of voltage support is proposed, which can better realize the accurate support of PCC voltage.
- Through simulation verification, the GFL inverter outputs the 5th and 7th harmonics, and the GFM inverter outputs the 11th and 13th harmonics. The THD of the grid current can be reduced from 13.47 to 1.53%. When the grid voltage drops to 251 V, there is still a voltage deviation of 13 V when the GFL inverter supports voltage alone, and after coordinated control, the PCC voltage can be accurately supported near the rated voltage. Although this paper analyzes specific scenarios, the proposed method has the value of generalized application.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, J.; Li, Y.W.; Wang, R.; Wang, C. A measurement method to solve a problem of using DG interfacing converters for selective load harmonic filtering. IEEE Trans. Power Electron. 2016, 31, 1852–1856. [Google Scholar] [CrossRef]
- de Jesus, V.M.R.; Cupertino, A.F.; Xavier, L.S.; Pereira, H.A.; Mendes, V.F. Comparison of MPPT strategies in three-phase photovoltaic inverters applied for harmonic compensation. IEEE Trans. Ind. Appl. 2019, 55, 5141–5152. [Google Scholar] [CrossRef]
- Osorio, F.; Mantilla, M.A.; Rey, J.M.; Petit, J.F. A flexible control strategy for multi-functional pv inverters with load compensation capabilities considering current limitations and unbalanced load conditions. Energies 2024, 17, 4218. [Google Scholar] [CrossRef]
- Kaur, S.; Dwivedi, B. Power quality issues and their mitigation techniques in microgrid system-a review. In Proceedings of the 7th India International Conference on Power Electronics (IICPE), Patiala, India, 17–19 November 2016; p. 1. [Google Scholar]
- Wei, Y.; Wang, J.; Li, N. An analysis of the influence of grid-connected renewable energy on power quality of power grids. Power Syst. Clean Energy 2022, 38, 108–114. [Google Scholar]
- Wang, J.; Sun, K.; Wu, H.; Zhu, J.; Xing, Y.; Li, Y. Hybrid connected unified power quality conditioner integrating distributed generation with reduced power capacity and enhanced conversion efficiency. IEEE Trans. Ind. Electron. 2020, 68, 12340–12352. [Google Scholar] [CrossRef]
- Acuna, P.; Moran, L.; Rivera, M.; Dixon, J.; Rodriguez, J. Improved active power filter performance for renewable power generation systems. IEEE Trans. Power Electron. 2013, 29, 687–694. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, L.; Pang, Y.; Liao, S.; Yang, X.; Wong, M.C. Power selective control with fault tolerance of multifunctional inverter for active power injection and power quality compensation. IEEE Trans. Ind. Electron. 2022, 70, 4309–4319. [Google Scholar] [CrossRef]
- Ali, Z.; Christofides, N.; Hadjidemetriou, L.; Kyriakides, E. Multi-functional distributed generation control scheme for improving the grid power quality. IET Power Electron. 2019, 12, 30–43. [Google Scholar] [CrossRef]
- Zeng, Z.; Yang, H.; Zhao, R.; Cheng, C. Topologies and control strategies of multi-functional grid-connected inverters for power quality enhancement: A comprehensive review. Renew. Sustain. Energy Rev. 2013, 24, 223–270. [Google Scholar] [CrossRef]
- Pranith, S.; Kumar, S.; Singh, B.; Bhatti, T.S. Multimode operation of PV-battery system with renewable intermittency smoothening and enhanced power quality. IET Renew. Power Gener. 2019, 13, 887–897. [Google Scholar] [CrossRef]
- Wang, J.; Sun, K.; Wu, H.; Zhang, L.; Zhu, J.; Xing, Y. Quasi-two-stage multifunctional photovoltaic inverter with power quality control and enhanced conversion efficiency. IEEE Trans. Power Electron. 2019, 35, 7073–7085. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous power theory and applications to power conditioning. In Instantaneous Power Theory and Applications to Power Conditioning; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Simões, M.G.; Busarello, T.D.C.; Bubshait, A.S.; Harirchi, F.; Pomilio, J.A.; Blaabjerg, F. Interactive smart battery storage for a PV and wind hybrid energy management control based on conservative power theory. Int. J. Control 2016, 89, 850–870. [Google Scholar] [CrossRef]
- Paredes, H.K.M.; Rodrigues, D.T.; Cebrian, J.C.; Bonaldo, J.P. CPT-based multi-objective strategy for power quality enhancement in three-phase three-wire systems under distorted and unbalanced voltage conditions. IEEE Access 2021, 9, 53078–53095. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Cui, B. An improved adaptive harmonic detection algorithm. In Proceedings of the 24th International Conference on Automation and Computing (ICAC), Newcastle Upon Tyne, UK, 6–7 September 2018. [Google Scholar]
- Choi, W.; Lee, W.; Han, D.; Sarlioglu, B. New configuration of multifunctional grid-connected inverter to improve both current-based and voltage-based power quality. IEEE Trans. Ind. Appl. 2018, 54, 6374–6382. [Google Scholar] [CrossRef]
- Zhang, X.; Spencer, J.W.; Guerrero, J.M. Small-signal modeling of digitally controlled grid-connected inverters with LCL filters. IEEE Trans. Ind. Electron. 2012, 60, 3752–3765. [Google Scholar] [CrossRef]
- Alves, A.G.P.; Rolim, L.G.B.; da Silva Dias, R.F.; dos Santos Ramos, J. Analysis of grid-connected VSCs subject to voltage harmonic disturbances: Prediction and design tool of resonant controllers. IEEE Trans. Energy Convers. 2023, 38, 239–249. [Google Scholar] [CrossRef]
- Golestan, S.; Ebrahimzadeh, E.; Guerrero, J.M.; Vasquez, J.C. An adaptive resonant regulator for single-phase grid-tied VSCs. IEEE Trans. Power Electron. 2018, 33, 1867–1873. [Google Scholar] [CrossRef]
- Ramos, G.A.; Ruget, R.I.; Costa-Castelló, R. Robust repetitive control of power inverters for standalone operation in DG systems. IEEE Trans. Energy Convers. 2020, 35, 237–247. [Google Scholar] [CrossRef]
- Qing, H.; Zhang, C.; Chai, X.; He, H.; Wang, X. Research on grid-connected harmonic current suppression of three-phase four-wire energy storage inverters. J. Power Electron. 2023, 23, 972–983. [Google Scholar] [CrossRef]
- Teng, Y.; Deng, W.; Pei, W.; Li, Y.; Dingv, L.; Ye, H. Review on grid-forming converter control methods in high-proportion renewable energy power systems. Glob. Energy Interconnect. 2022, 5, 328–342. [Google Scholar] [CrossRef]
- Li, Y.; Gu, Y.; Green, T.C. Revisiting grid-forming and grid-following inverters: A duality theory. IEEE Trans. Power Syst. 2022, 37, 4541–4554. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, W.; Lin, W.; Wen, J. Grid forming converters in renewable energy sources dominated power grid: Control strategy, stability, application, and challenges. J. Mod. Power Syst. Clean Energy 2021, 9, 1239–1256. [Google Scholar] [CrossRef]
- Zhang, C.; Dou, X.; Wang, L.; Dong, Y.; Ji, Y. Distributed cooperative voltage control for grid-following and grid-forming distributed generators in islanded microgrids. IEEE Trans. Power Syst. 2022, 38, 589–602. [Google Scholar] [CrossRef]
- Rosso, R.; Engelken, S.; Liserre, M. Robust stability investigation of the interactions among grid-forming and grid-following converters. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 991–1003. [Google Scholar] [CrossRef]
- Cheng, H.; Shuai, Z.; Shen, C.; Liu, X.; Li, Z.; Shen, Z.J. Transient angle stability of paralleled synchronous and virtual synchronous generators in islanded microgrids. IEEE Trans. Power Electron. 2020, 35, 8751–8765. [Google Scholar] [CrossRef]
- Shen, C.; Shuai, Z.; Shen, Y.; Peng, Y.; Liu, X.; Li, Z.; Shen, Z.J. Transient stability and current injection design of paralleled current-controlled VSCs and virtual synchronous generators. IEEE Trans. Smart Grid 2020, 12, 1118–1134. [Google Scholar] [CrossRef]
- Pengyin, L.; Hui, L.; Linlin, W.; Yunhong, L.I.; Siqi, Y.U.; Xiaorong, X.I. Grid-following and grid-forming combined control and optimal configuration to satisfy oscillation constraints across whole operating region. Autom. Electr. Power Syst. 2024, 48, 139–146. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Value |
|---|---|---|
| SGFL | Rated capacity of GFL inverter | 48 kVA |
| P1r | Reference active power of GFL inverter | 40 kW |
| Q1r | Reference reactive power of GFL inverter | 0 kVar |
| SGFM | Rated capacity of GFM inverter | 12 kVA |
| P2r | Reference active power of GFM inverter | 10 kW |
| Q2r | Reference reactive power of GFM inverter | 0 kVar |
| Symbol | Parameters | Value |
|---|---|---|
| Vdc | Voltage on the DC side | 800 V |
| Ugrid | Amplitude of grid voltage | 311 V |
| L1 | Filter inductor of GFL inverter | 3 mH |
| L2 | Filter inductor of GFM inverter | 3 mH |
| R1 | Equivalent resistance of L1 | 0.01 Ω |
| R2 | Equivalent resistance of L2 | 0.01 Ω |
| Lg | Grid inductance | 2.5 mH |
| Rg | Grid resistance | 0.001 Ω |
| C1 | Filter capacitor of GFL inverter | 50 µF |
| C2 | Filter capacitor of GFM inverter | 50 µF |
| Rz1 | Damping resistance of C1 | 4.5 Ω |
| Rz2 | Damping resistance of C2 | 4.5 Ω |
| f0 | Fundamental frequency of the grid | 50 Hz |
| fsw | Switching frequency | 10 kHz |
| Rnl | Resistance of non-linear loads | 15 Ω |
| Cnl | Capacitance of non-linear loads | 20 µF |
| Symbol | Parameters | Value |
|---|---|---|
| Kpp | Proportionality coefficient for PLL | 2.38 |
| Kip | Integral coefficient for PLL | 869 |
| Kps | Proportionality coefficient for GFL power loop | 0.0015 |
| Kis | Integral coefficient for GFL power loop | 1 |
| kp | Droop coefficient of GFM active power loop | 0.0002 |
| kq | Droop coefficient of GFM reactive power loop | 0.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zhang, H.; Xiao, F.; Zheng, Y.; Guo, Q. Cooperative Control Strategy for Power Quality Based on Heterogeneous Inverter Parallel System. Energies 2024, 17, 6226. https://doi.org/10.3390/en17246226
Wang Q, Zhang H, Xiao F, Zheng Y, Guo Q. Cooperative Control Strategy for Power Quality Based on Heterogeneous Inverter Parallel System. Energies. 2024; 17(24):6226. https://doi.org/10.3390/en17246226
Chicago/Turabian StyleWang, Qing, Hongzhao Zhang, Fan Xiao, Yuting Zheng, and Qi Guo. 2024. "Cooperative Control Strategy for Power Quality Based on Heterogeneous Inverter Parallel System" Energies 17, no. 24: 6226. https://doi.org/10.3390/en17246226
APA StyleWang, Q., Zhang, H., Xiao, F., Zheng, Y., & Guo, Q. (2024). Cooperative Control Strategy for Power Quality Based on Heterogeneous Inverter Parallel System. Energies, 17(24), 6226. https://doi.org/10.3390/en17246226