1. Introduction
With the introduction of a “double carbon” strategy, the wind power industry is continuously advancing technologically, leading to an increase in installed capacity. As of April 2023, China’s wind power installed capacity reached 380 million kilowatts, accounting for 14.3% of the national power generation installed capacity. However, the inherent stochasticity and volatility associated with wind power generation have exacerbated the power imbalance between supply and demand, posing a serious threat to grid frequency stability [
1]. Ensuring grid frequency safety and stability becomes particularly crucial as wind power penetration continues to rise.
To ensure economic benefits, wind turbines are typically operated at the MPPT to optimize their performance. However, when participating in primary frequency regulation by utilizing rotor kinetic energy, wind turbines provide additional power support under low-frequency conditions (where the frequency drop exceeds the lower limit of the dead zone). This requires the release of rotational kinetic energy, resulting in a decrease in rotor speed and deviation from optimal power output, thereby limiting the wind turbine’s ability to provide additional output. Moreover, if the rotor speed drops to its protection limit and needs quick recovery, it would consume a significant amount of power and lead to a substantial shortage that hampers system frequency recovery. Consequently, wind turbines cannot meet the frequency support requirements for primary frequency regulation during low-frequency operating conditions for 20–30 s.
Energy storage, serving as a superior power source for frequency regulation, offers advantages such as precise tracking, rapid response, and bidirectional regulation. It has gained extensive application in wind power generation systems, attracting significant attention from domestic and international scholars who have conducted research on energy storage control strategies and capacity configuration [
2].
The authors in reference [
3,
4] devoted themselves to meticulously modeling a Li-ion battery energy storage system (BESS), which was found to significantly improve the grid connection stability of DFIG wind turbines. Their work provides essential models and references for further research. Reference [
5] emphasizes from an economic standpoint that implementing wind power assembly energy storage as primary frequency regulation offers a more cost-effective solution. This strategy maximizes utilization of the wind turbine rotor’s kinetic energy while minimizing the necessary energy storage capacity. The authors of references [
6,
7,
8] investigate various energy storage devices such as SCs, flywheel energy storage systems, lithium batteries, and hydrogen fuel cells to examine their effects on primary frequency regulation. From the perspective of coefficient optimization, various methods such as linear segmentation, S-function, and fuzzy control were employed in [
9] to rectify the charging and discharging coefficients. This amendment effectively mitigates the issues of over-charging and over-discharging in energy storage systems. References [
10,
11] concentrate on optimizing the allocation ratio of frequency regulation resources by introducing dynamic optimization coefficients through fuzzy control. Consequently, wind turbines’ adaptability for frequency regulation is significantly enhanced. Moreover, energy storage devices like SCs can further augment the power support capacity of wind turbines during low-frequency conditions.
In conditions of high-frequency conditions (where the frequency rise exceeds the upper limit of the dead zone), wind turbines can easily adjust their power output. While the rotor needs to absorb power during acceleration, wind turbines may deviate from the optimal power tracking point. However, there are no inherent limitations that restrict wind turbines from reducing their output. Therefore, wind turbines are more suitable for participating in frequency regulation under high-frequency operating conditions. Additionally, wind turbines retain a significant amount of rotational kinetic energy during the acceleration process which, if effectively harnessed, can further alleviate energy storage requirements in low-frequency conditions and minimize configuration demands for energy storage.
Therefore, based on the power-speed characteristics of wind turbines, this paper proposes a primary frequency regulation strategy that coordinates rotor kinetic energy and SC. Under low-frequency conditions, SCs support power generation, while under high-frequency conditions, the wind turbine rotor accelerates and reduces output. Continuous attention is given to subsequent frequency changes. In the case of short-term low-frequency conditions, stored kinetic energy is released to provide support, forming a mechanism for wind turbine kinetic energy recovery and release. This mechanism reduces the charging and discharging requirements of the SC system, extends its service life, and considers the requirements for wind turbine frequency regulation and economy. Additionally, for switching between rotor kinetic energy and SC strategies, this paper comprehensively considers the state of charge (SOC) of SC energy storage and introduces a logistic function to real-time correct allocation coefficients of DFIG and SC resources in order to achieve smooth switching between different energy storage resources. Finally, simulations were conducted using the MATLAB/Simulink wind storage joint frequency regulation model in short-term/long-term frequency fluctuation scenarios to verify the effectiveness and rationality of the proposed frequency regulation strategy.
The subsequent sections of this paper are structured as follows:
Section 2 provides a concise analysis of the frequency regulation characteristics exhibited by wind turbines. In
Section 3, an elaborate presentation is given on the collaborative primary frequency regulation control strategy.
Section 4 validates the feasibility of the proposed control strategy and compares it with other conventional approaches. Finally, concluding remarks are presented in
Section 5.
2. Frequency Regulation Characteristics of DFIG
According to “Technical Specification for Power Grid and Source Coordination (DL/T 1870–2018)” [
12], the primary frequency regulation dead zone should be controlled within ±0.05 Hz. To comply with this requirement, the dead zone of both DFIG and thermal power units is uniformly set at ±0.033 Hz. When the frequency deviation exceeds +0.033 Hz, it indicates a high-frequency operating condition, triggering the initiation of frequency rise regulation. Conversely, when the deviation drops below −0.033 Hz, it signifies a low-frequency operating condition and initiates frequency reduction regulation.
Based on reference [
13], it has been observed that throughout the year, there is a probability of less than 10% for forecasted wind speed to exceed the turbine’s rated wind speed by over 80%. Considering this information along with the MPPT curve analysis, it can be inferred that at lower wind speeds, the rotor speed at DFIG’s MPPT point is comparatively lower while allowing for a wide range of adjustment on its right side. This characteristic can be effectively utilized to enhance efficiency in wind power generation systems.
The transformation process of DFIG participating in frequency rise regulation is illustrated in
Figure 1, where the horizontal axis represents the rotor speed of the wind turbine
ωr and the vertical axis represents the output electromagnetic power. Under normal frequency conditions, the wind turbine operates stably at point A with MPPT control, corresponding to the optimal speed
ωopt. In case of a sudden increase in system frequency, the output electromagnetic power instantly decreases to point B. With additional power from traditional virtual inertia control, the wind turbine absorbs kinetic energy of the rotor, causing an increase in rotor speed and gradually transitioning to point C, reaching its highest rotor speed
ω1 during this frequency regulation. Once it has reached point C, when the wind turbine runs back into dead zone frequencies, it switches back to MPPT control and returns along the MPPT curve to operating point A.
It is worth noting that during this process, as the operating range of
ωr lies between 0.7 and 1.2 pu, the magnitude of rotor kinetic energy becomes significant. On one hand, a sudden release of rotor speed can potentially destabilize the system frequency. On the other hand, in practical scenarios, continuous fluctuations in system frequency are observed. Based on statistical data from reference [
5], within a day, there are a total of 1670 instances where bus frequency crosses the dead zone for frequency regulation in a specific area’s power grid; among these occurrences, 720 times exceed the upper limit while 950 times exceed the lower limit of this dead zone. Therefore, a strategy can be proposed to optimize the utilization of the available space on the right side of the MPPT point by enabling temporary storage of rotor kinetic energy stored from the frequency rise, as a contingency measure for subsequent frequency fluctuations.
3. Frequency Regulation Strategy Based on Rotor Kinetic Energy of DFIG and SC
This paper investigates the potential for long-term adjustable overspeed operation of wind turbines, aiming to optimize the utilization of rotor kinetic energy and recover stored energy through high-frequency operating conditions. SCs are dynamically adaptive and coordinated with wind turbines, primarily responsible for providing frequency support during low-frequency operating conditions. Based on these design principles, a primary frequency regulation control strategy has been developed based on wind turbine rotor kinetic energy and energy storage.
3.1. DFIG Control Strategy
In order to address the limited adaptability of conventional virtual inertia control strategies in coping with prolonged and continuous frequency fluctuations, this paper proposes a wind turbine energy recovery control strategy, as illustrated in
Figure 2.
Where
Kp corresponds to the virtual sag coefficient;
Kd corresponds to the virtual inertia coefficient;
Kw corresponds to the wind turbine allocation coefficient based on the logistic function which is referred to in
Section 3.2.1; Δ
P corresponds to the additional power calculated under traditional virtual inertia control; Δ
Pe corresponds to the additional power of the wind turbine controlled by the strategy in this paper;
Pe corresponds to the electromagnetic power of the wind turbine;
wr corresponds to the actual rotor speed; and
wr* corresponds to the reference value of the rotor speed.
In this paper, we introduce a frequency fluctuation logic judgment link to enable real-time logic judgment based on the working condition of frequency fluctuations. Under low-frequency conditions, an adaptive weight parameter
Kw is incorporated into the wind turbine output, building upon traditional virtual inertia control. The calculation of
Kw follows the methodology outlined in
Section 3.2.1.
In the event of high-frequency conditions, the wind turbine accelerates to store rotor kinetic energy and locks onto the corresponding turbine speed when ΔP reaches its maximum. The rotor kinetic energy is temporarily stored and subsequently released based on frequency fluctuations within a 60 s time window. If there is no frequency drop within this timeframe, the rotor kinetic energy will be naturally released, returning the wind turbine to the MPPT state. However, if a frequency drop occurs within 60 s, a rapid release of rotor kinetic energy provides active support before SC participates in subsequent joint frequency control.
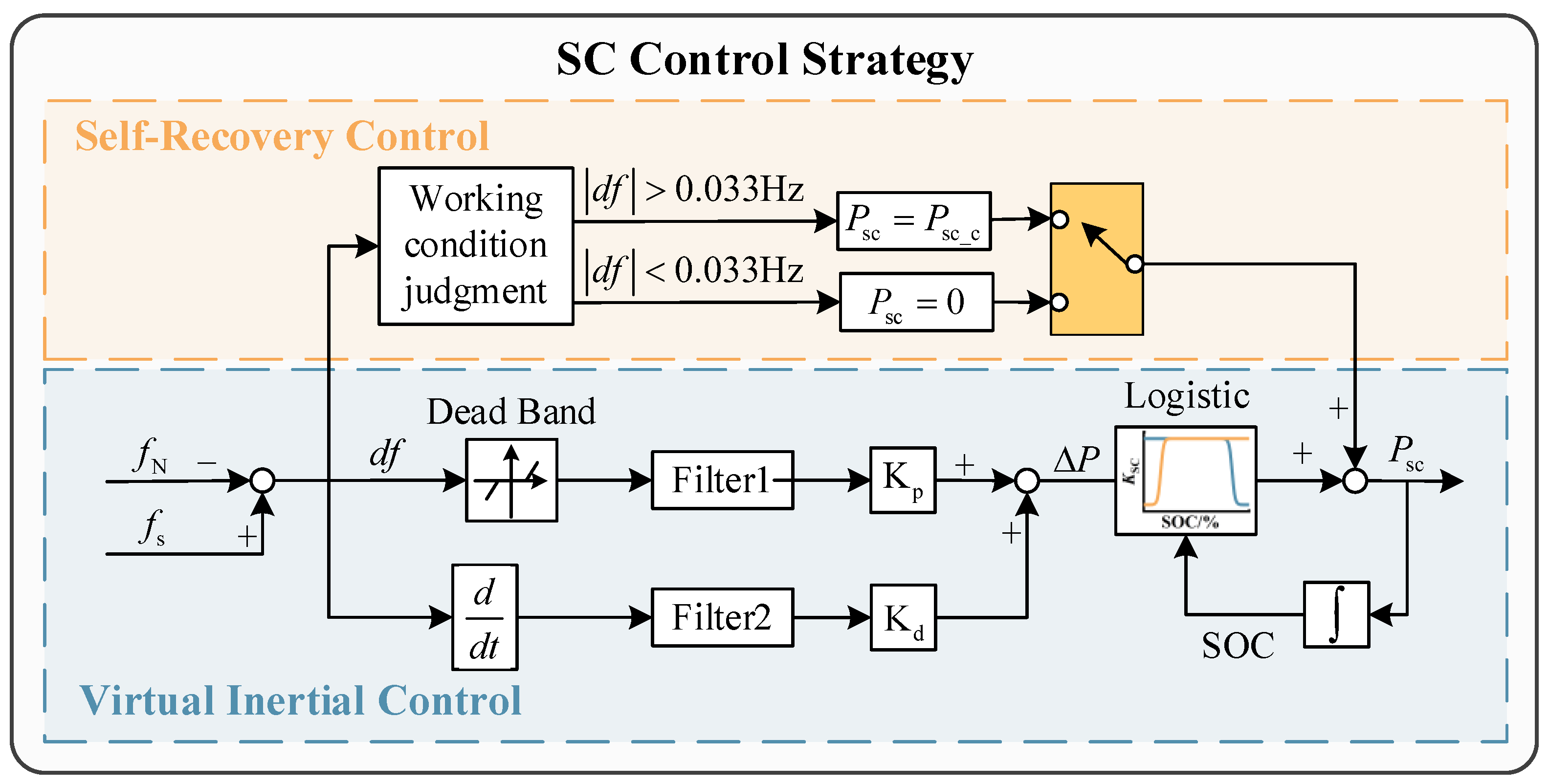
3.2. SC Adaptive Control Strategy
The conventional fixed distribution coefficient primary frequency regulation control strategy may result in excessive charging and discharging of energy storage, thereby impacting the operational lifespan of energy storage systems. In this study, a logistic function is introduced to optimize the wind storage distribution coefficient, ensuring the appropriate SOC range for energy storage and facilitating a seamless adaptive transition between the output of SCs and DFIG. Additionally, an SOC self-recovery link is implemented to prepare batteries for subsequent phases of frequency regulation, as showed in
Figure 3.
Where
Kp corresponds to the virtual sag coefficient;
Kd corresponds to the virtual inertia coefficient;
Ksc corresponds to the energy storage allocation coefficients based on the logistic function which is referred to the
Section 3.2.1; and
Psc corresponds to the electromagnetic power of the SC.
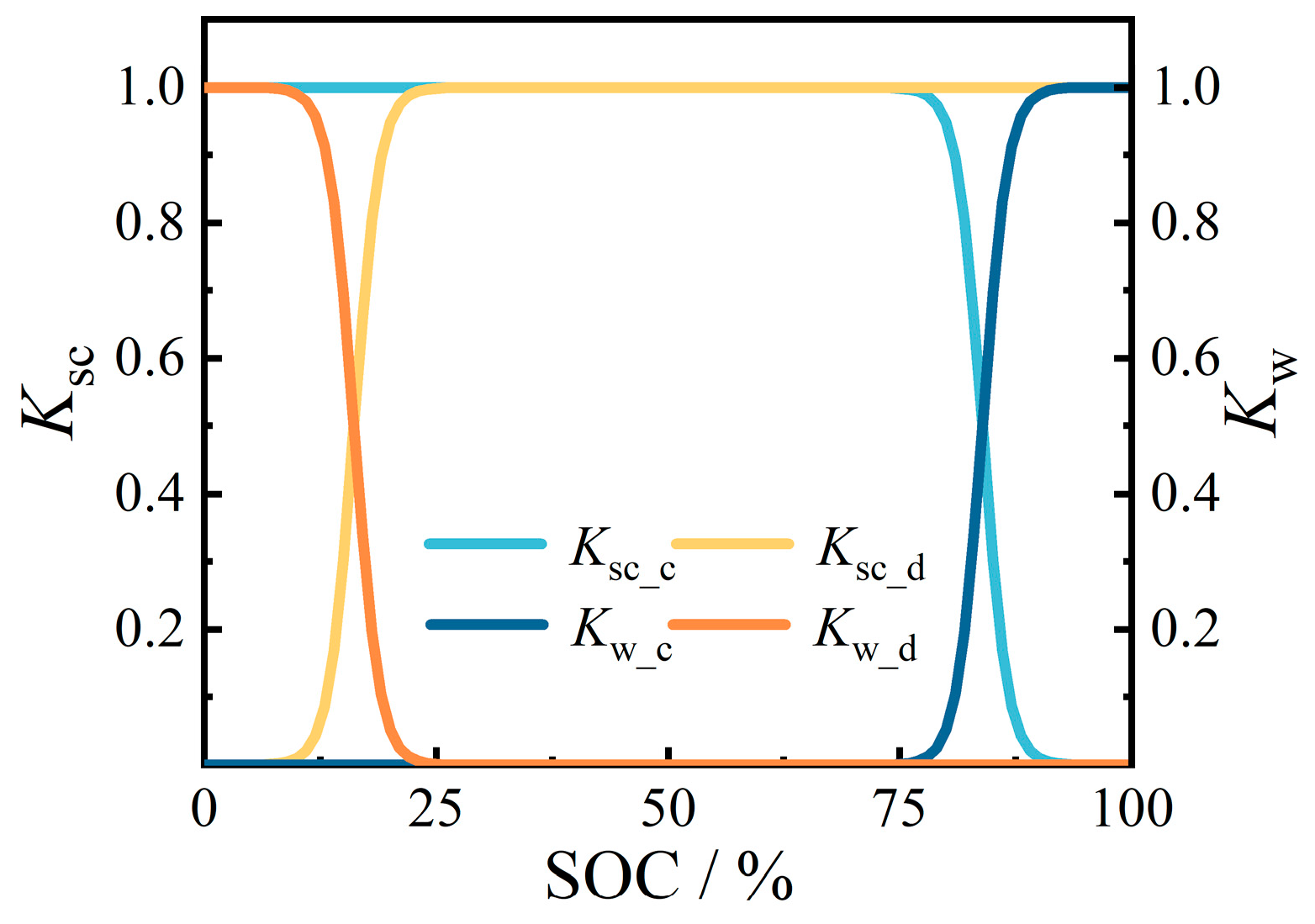
3.2.1. Adaptive Control of SC SOC
This paper divides the SOC for SCs into five intervals, namely, minimum, low, high, and maximum values. To ensure that the SOC does not exceed its limit, an S-type logistic function is employed to establish the charging and discharging curves within [SOC
min, SOC
low] and [SOC
high, SOC
max]. The logistic function demonstrates exponential growth in its initial stage, gradually saturates as the value increases, and ultimately converges towards a stable value. The specific expression is provided below.
where
K corresponds to the final value;
P0 corresponds to the initial value, and the larger
P0, the shorter the time to reach saturation; and
r corresponds to an indicator that measures the speed of curve change, and the larger
r, the faster the change. The logistic regression function is being incorporated into the allocation coefficient of frequency regulation for DFIG and SC, with SOC as the independent variable and adaptive factors
r and
P0 as parameter variables.
Ksc and
Kw are the dependent variables in this context. According to experience, the parameter variable is taken as
P0 = 0.01 and
r = 15 [
14,
15]. Therefore, based on SOC feedback, an adaptive parameter expression for SC and DFIG is showed in:
where
Ksc_c corresponds to the charging coefficient of the SC;
Ksc_d corresponds to the discharge coefficient of the SC.
The adaptive parameters of the SC based on SOC feedback are shown in
Figure 4, and the wind turbine frequency regulation parameters are determined by Formula (4) accordingly.
3.2.2. Self-Recovery Control of SOC
As previously mentioned, the frequency regulation responsibility for low-frequency operating conditions is primarily assigned to the SCs. Therefore, the self-recovery control of SOC in SCs is implemented after frequency drop regulation. During periods without frequency regulation, if the frequency stabilizes within the dead band range, power absorption from the grid by SCs continues until SOC reaches 90%. Throughout the charging process, a constant power output is maintained by SCs to ensure maximum charging of SOC and subsequently reduce required energy storage capacity and optimize investment.
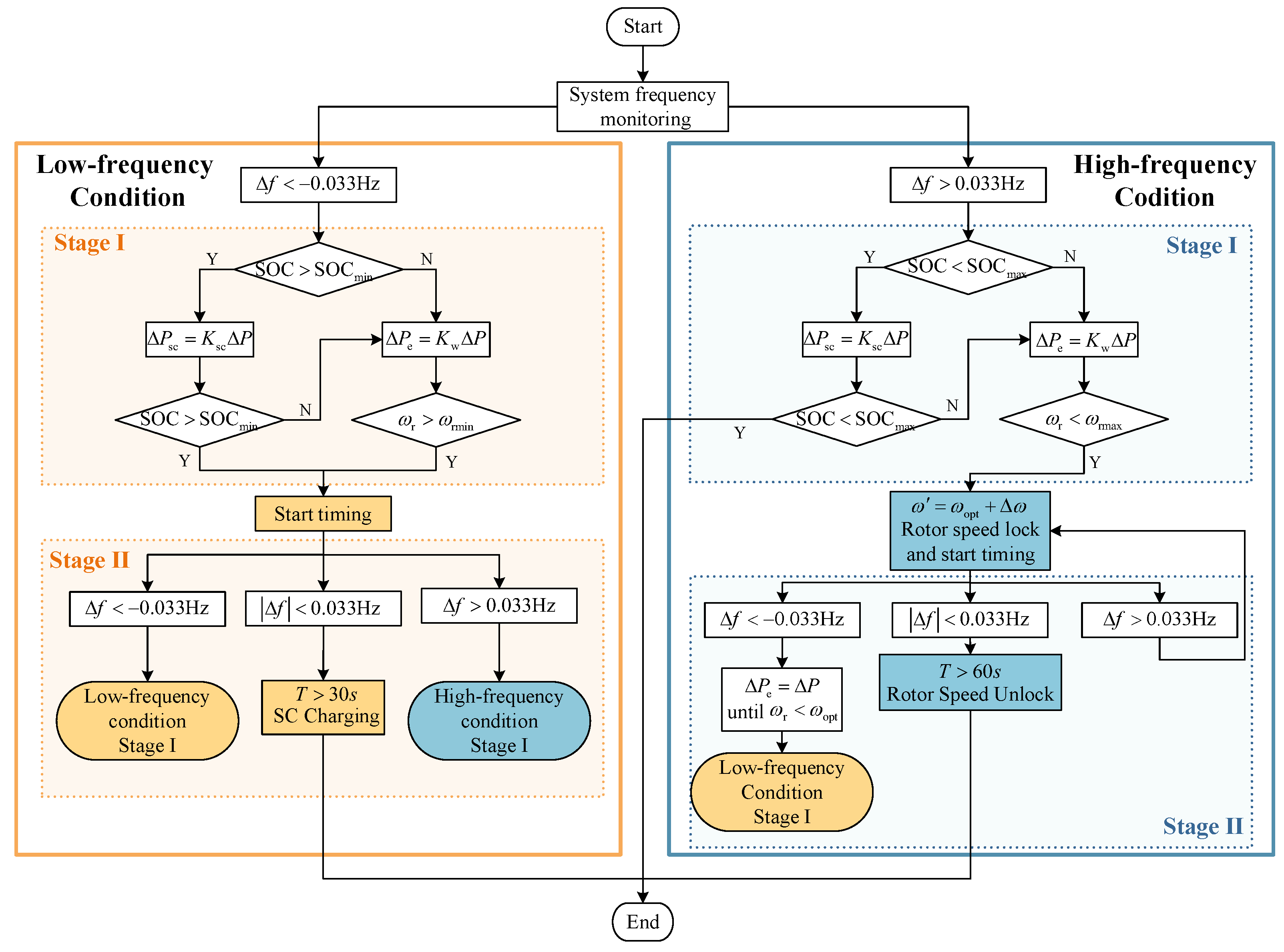
3.3. Flow Chart of Primary Frequency Regulation Control Strategy
DFIG and SCs are logically coordinated according to the sequential allocation. Considering that the SC is connected to the DFIG DC bus through the converter, the response speed is millisecond level, and a fast power response can be achieved, while the power response of the wind turbine is relatively lagging, so the charge and discharge of the SC are preferentially involved in the primary frequency regulation.
The DFIG and SC are logically coordinated based on sequential allocation, ensuring efficient power response. Due to the converter connection between the SC and DFIG DC bus, millisecond-level response speed is achieved, enabling a fast power response. In contrast, the wind turbine’s power response lags behind. Therefore, prioritizing the involvement of SC in primary frequency regulation.
Therefore, the flow of primary frequency regulation strategy based on rotor kinetic energy of DFIG and SC is shown in
Figure 5. The frequency regulation control is divided into two parts:
3.3.1. High-Frequency Condition
When the grid frequency exceeds the dead band threshold, the wind energy storage system actively engages in frequency regulation. Initially, during Stage I, the SC is charged and its SOC is continuously monitored to determine whether the wind turbine should participate in frequency regulation or not.
If the SOC never exceeds SOChigh, the system will employ virtual inertia control for charging until the end of regulation. However, if SOC surpasses SOChigh, active power support is required from the wind turbine. By referring to real-time calculations based on Formulas (2) and (4), transition coefficients Ksc and Kw are determined using SOC to adjust both SC and DFIG frequency regulation power. Subsequently, in Stage II of the control system, after regulation under high-frequency condition, the wind turbine locks its rotor speed at maximum value while temporarily preserving rotor kinetic energy. A logical judgment is made based on frequency fluctuations within a 60 s cycle. If the frequency decreases, priority is given to releasing the rotor kinetic energy stored in Stage I, and then the frequency regulation process is shifted towards the frequency drop regulation. Alternatively, if no decrease in frequency occurs by the end of 60 s, then the wind turbine releases its rotor kinetic energy and returns to its MPPT.
3.3.2. Low-Frequency Condition
When the grid frequency falls below the dead zone threshold, the wind energy storage system actively participates in frequency regulation for reduction. In Stage I, the SC is discharged first, following a similar approach as under high-frequency condition. Based on the current SOC, it is determined whether the wind turbine should engage in frequency regulation or not.
If the SOC never exceeds SOClow, the energy storage system is discharged using virtual inertia control until the end of frequency regulation. However, if SOC exceeds SOClow, active participation of the wind turbine in frequency regulation becomes necessary. Real-time calculations based on Formulas (3) and (4) are performed to determine transition coefficients Ksc and Kw, which are utilized for adjusting both the energy storage system and the wind turbine’s power contribution to frequency regulation based on SOC.
Following the aforementioned two cases of regulation, both enter Stage II of low-frequency condition. The frequency fluctuation is continuously monitored for logical assessment. If it remains stable within the designated frequency dead zone for a duration of 30 s, constant power charging is implemented to restore the SOC in the SC. Conversely, if any deviation in frequency occurs, an immediate transition to the corresponding frequency regulation state takes place.
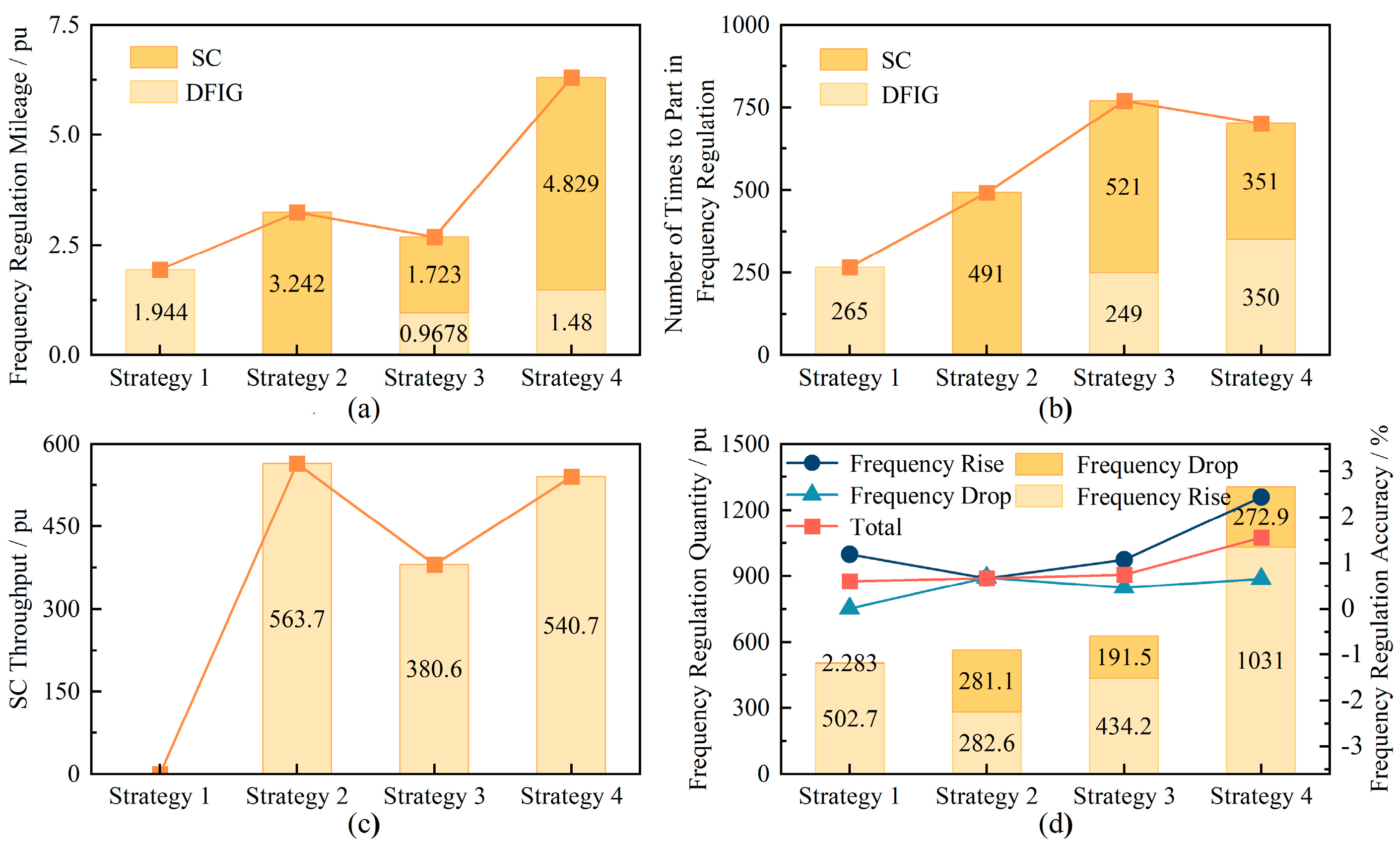
3.4. Simulation Evaluation Indicators
In order to evaluate the effectiveness and economy of the frequency regulation strategy proposed in this paper and the contribution of frequency regulation resources, the following indexes are defined:
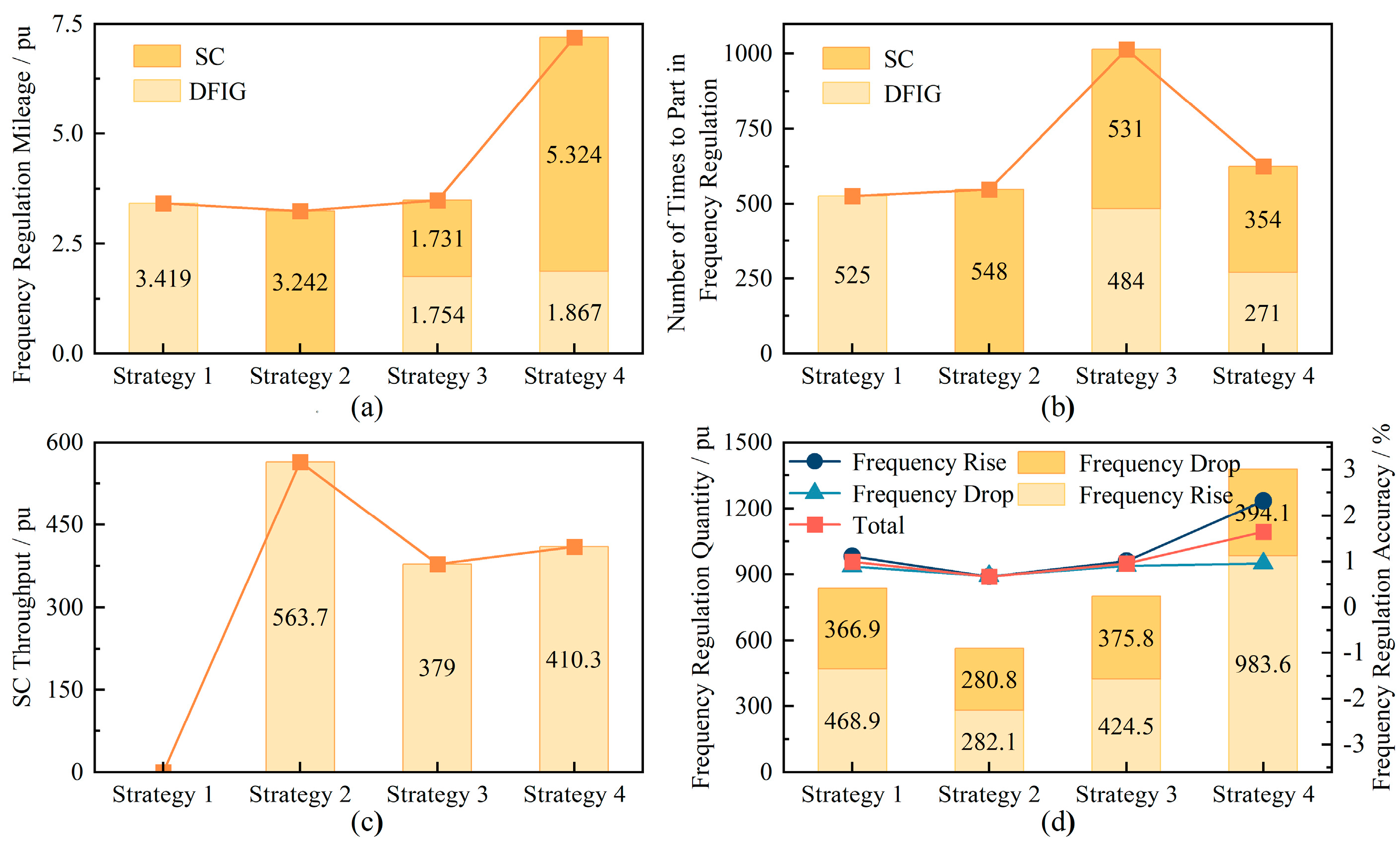
Frequency regulation mileage: the total absolute value of the output power change of a frequency regulation resource in a period is defined as the “frequency regulation mileage” of the resource [
16]. The frequency regulation mileage is calculated as follows:
- 2.
Frequency regulation accuracy: define the ratio of the integral between the actual output and the frequency regulation demand instruction in a frequency regulation process as frequency regulation accuracy.
where
Ps is the actual output;
Po is the frequency regulation demand power instruction.
- 3.
Frequency regulation integral power contribution index: according to the standard requirements, define the wind turbine primary frequency regulation integral power contribution index q as follows:
where
K15,
K30, and
K45 are the power contribution index weights of the wind turbine for 15 s, 30 s, and 45 s, which are set as 0.55, 0.3, and 0.15, respectively;
q15,
q30, and
q45 are first frequency regulation integral power contribution indexes of the wind turbine for 15 s, 30 s, and 45 s, respectively.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}