
A Distributed Coordination Approach for Enhancing Protection System Adaptability in Active Distribution Networks


Abstract
1. Introduction
- Proposal of an adaptive communication-based protection scheme that leverages distributed coordination and under-voltage criteria. This scheme enhances the effectiveness of protection systems in active distribution networks.
- Despite its communication dependence, the proposed scheme only requires a one-byte data exchange of element information between neighboring agents to ensure coordinated operation. This significantly reduces bandwidth requirements.
- The scheme empowers non-adaptive protection equipment to exhibit adaptive characteristics. This is verified through real-time testing in a Controller Hardware-In-the-Loop (CHIL) experimental setup, considering the primary fault behavior of inverter-based resources (IBRs).
2. Background
2.1. Fault Behavior and Modeling of Inverter-Based Resources
- Voltage support during fault events: IBRs are expected to remain connected to support voltage during fault events. For instance, in certain countries, inverters must adhere to the ride-through curves defined in IEEE 1547-2018 [26].
- Dynamic limitation of fault current: to ensure the safety of inverters due to their reduced thermal capabilities, a dynamic limitation of fault current is employed [27].
2.2. Fault Direction Estimation Algorithms
2.3. Graph Theory
2.4. Optimal Protection Coordination
3. Proposed Protection Scheme
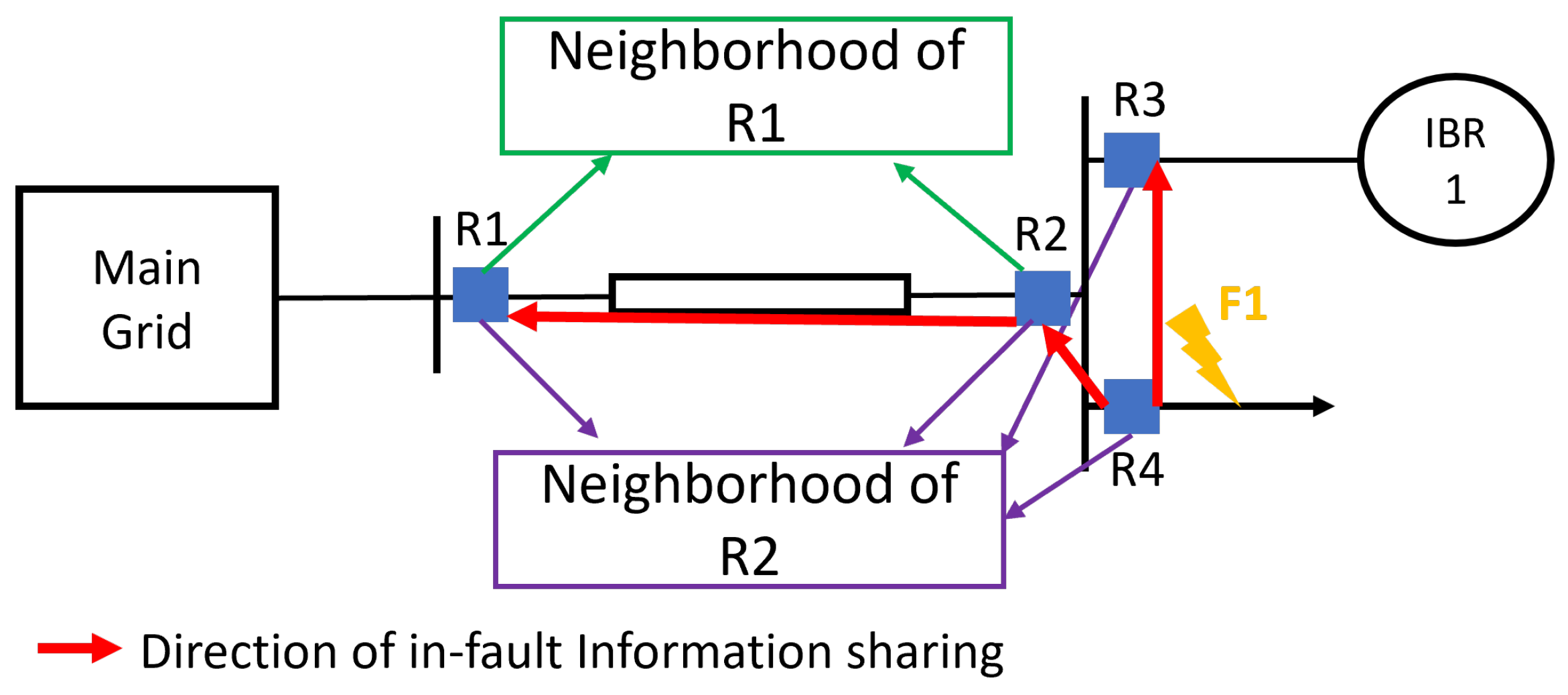
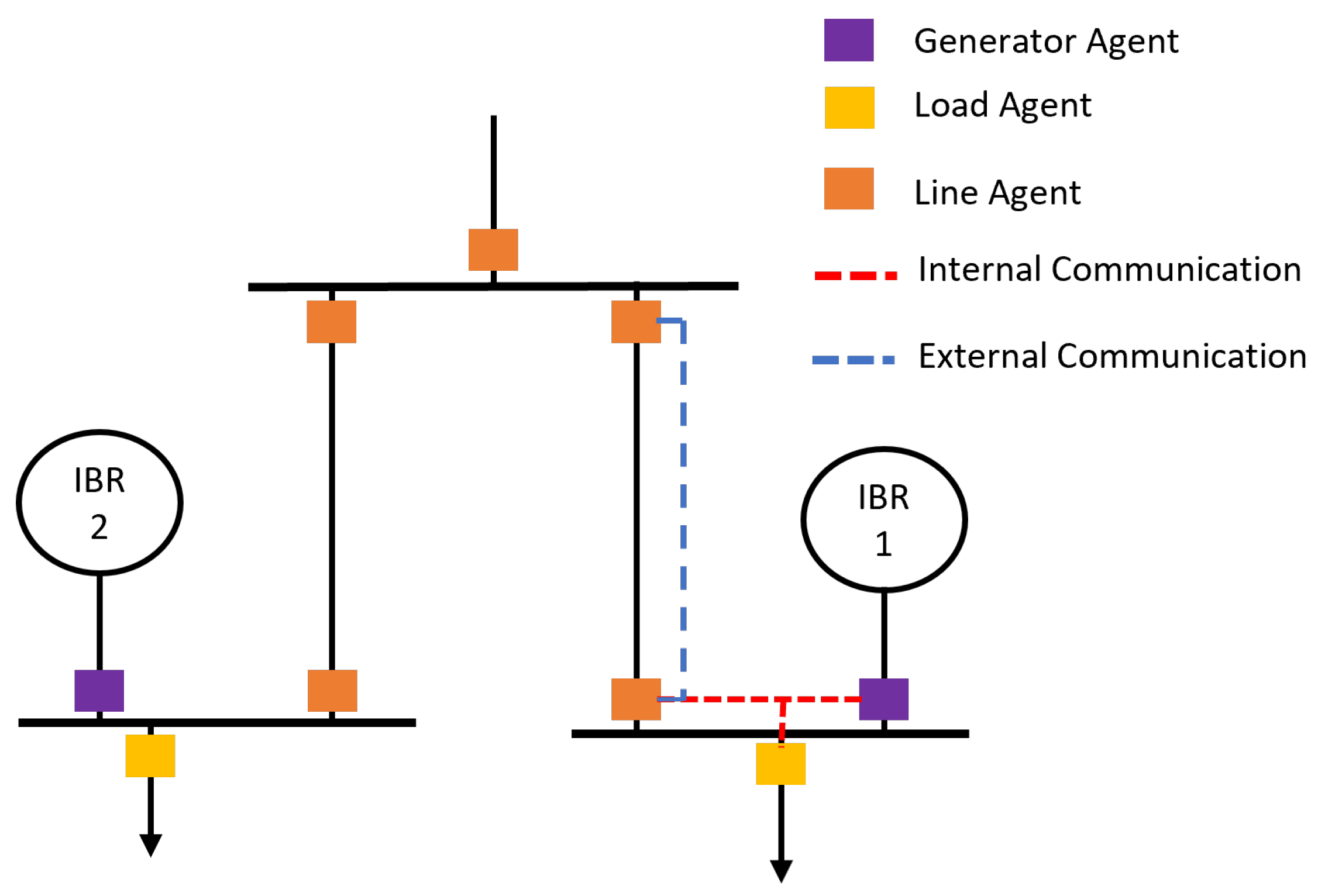
3.1. Distributed Protection Coordination
| Algorithm 1: Iteration algorithm for protection equipment l |
|
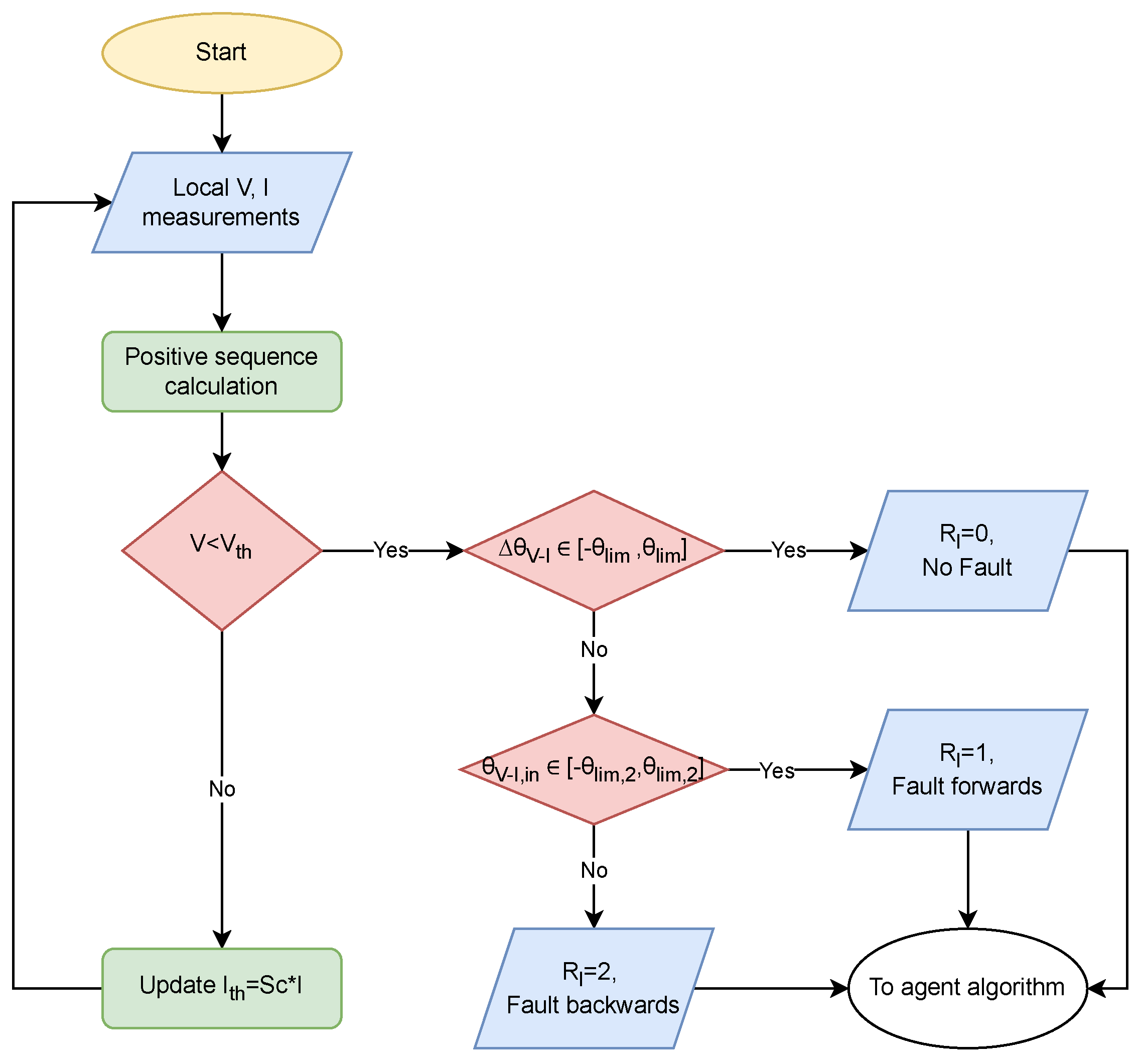
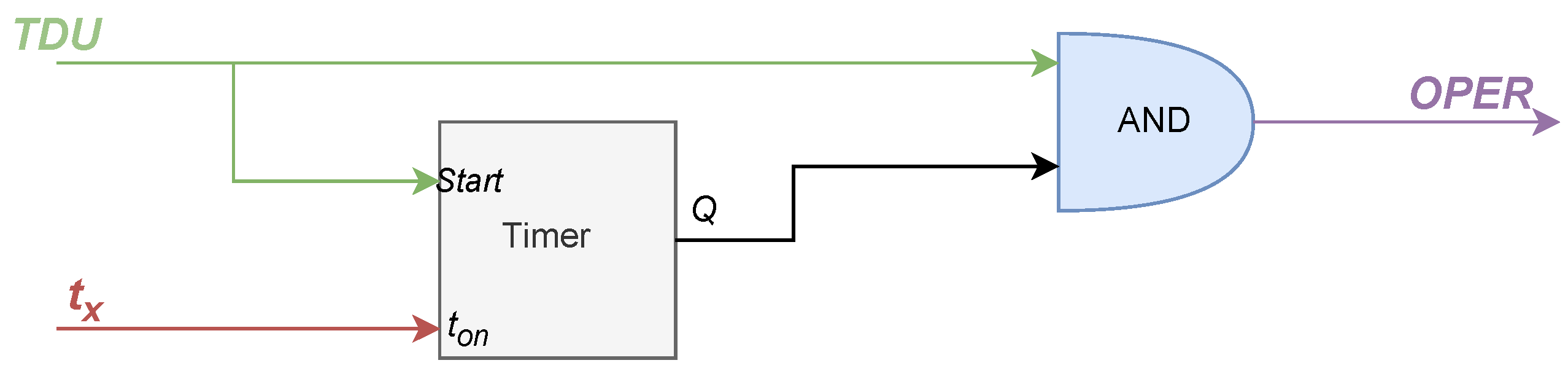
3.2. Fault Detection and Direction Estimation Algorithm
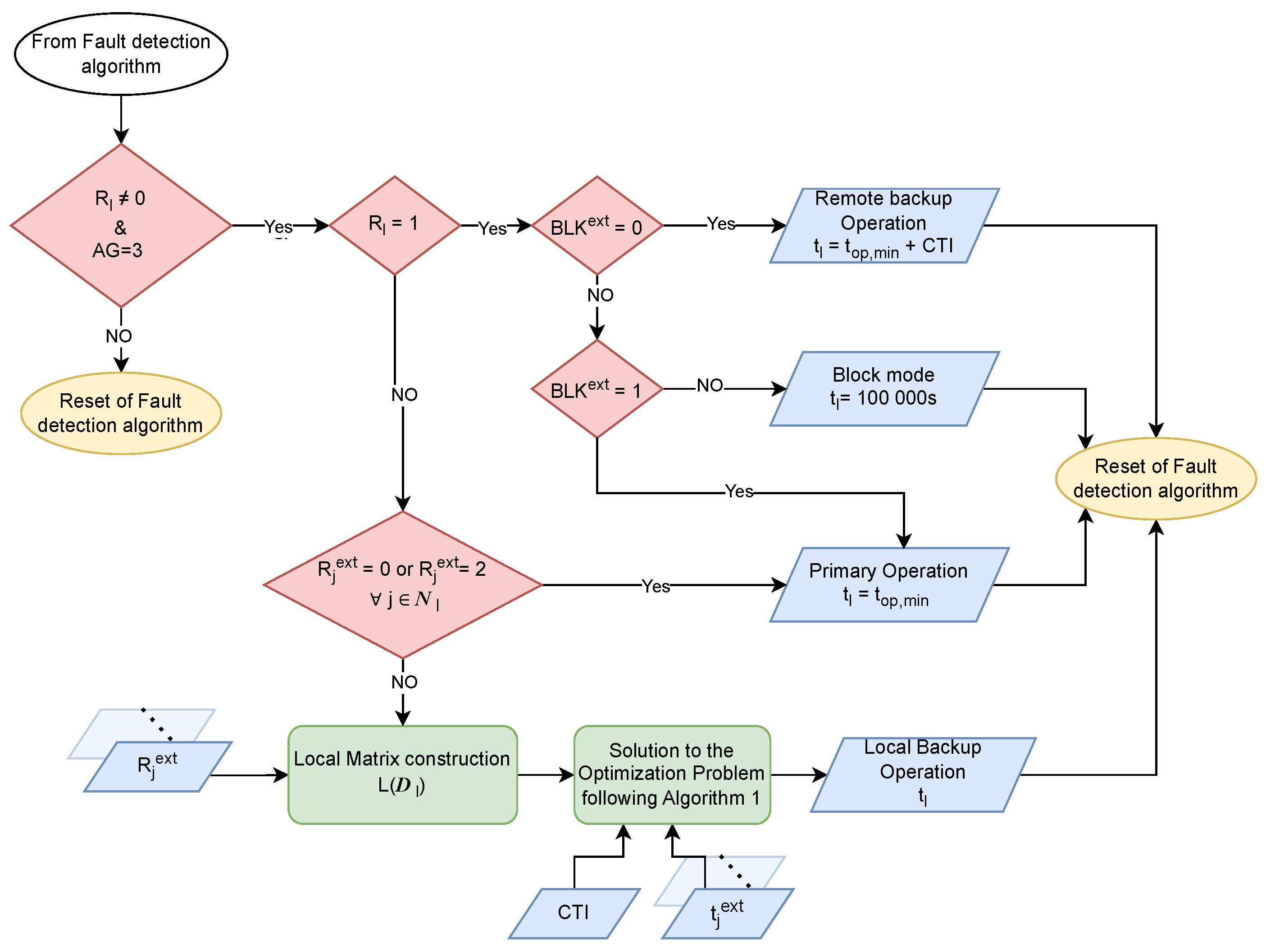
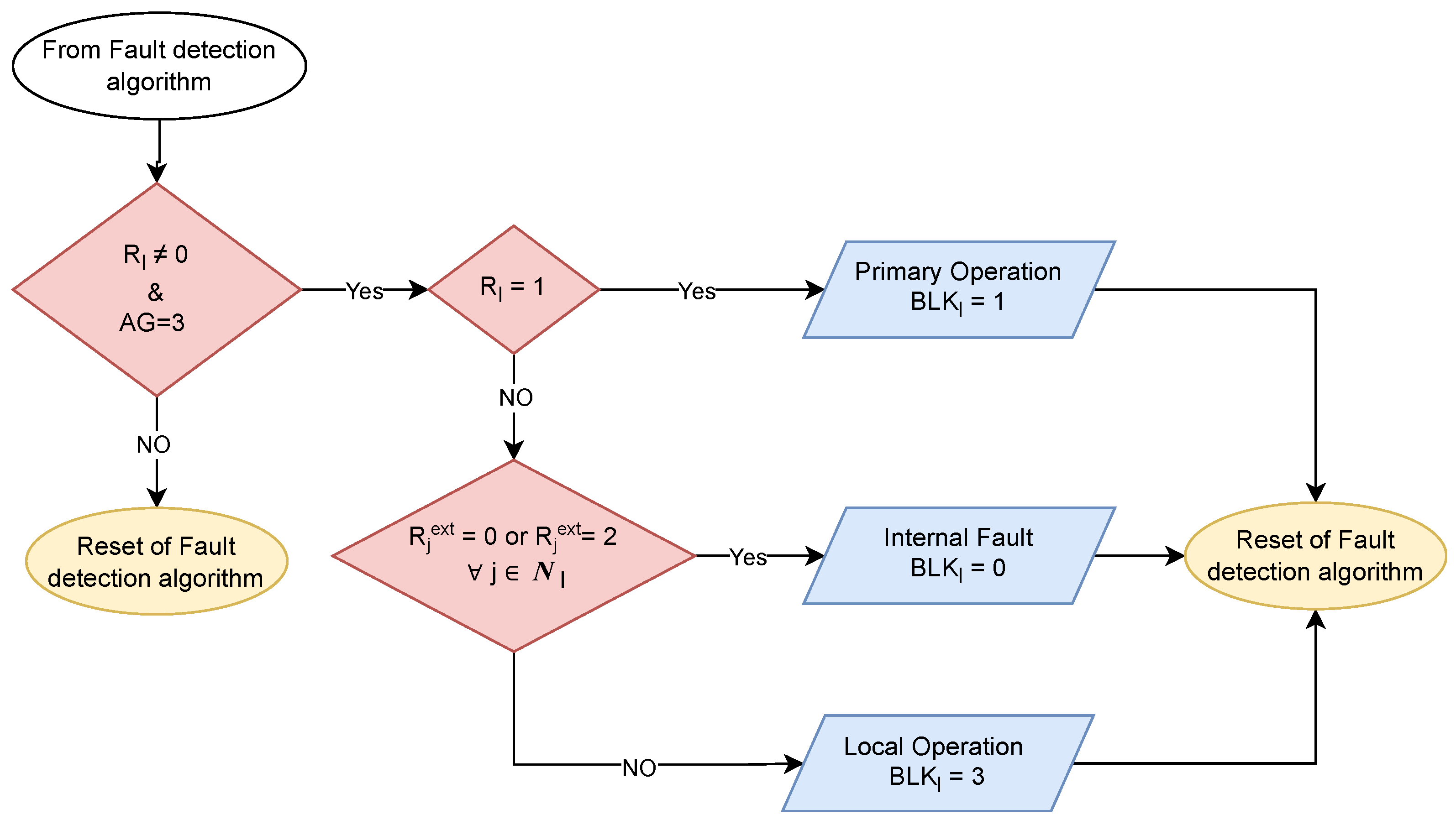
3.3. Online Coordination Algorithm
4. Real-Time Simulation Test Bed
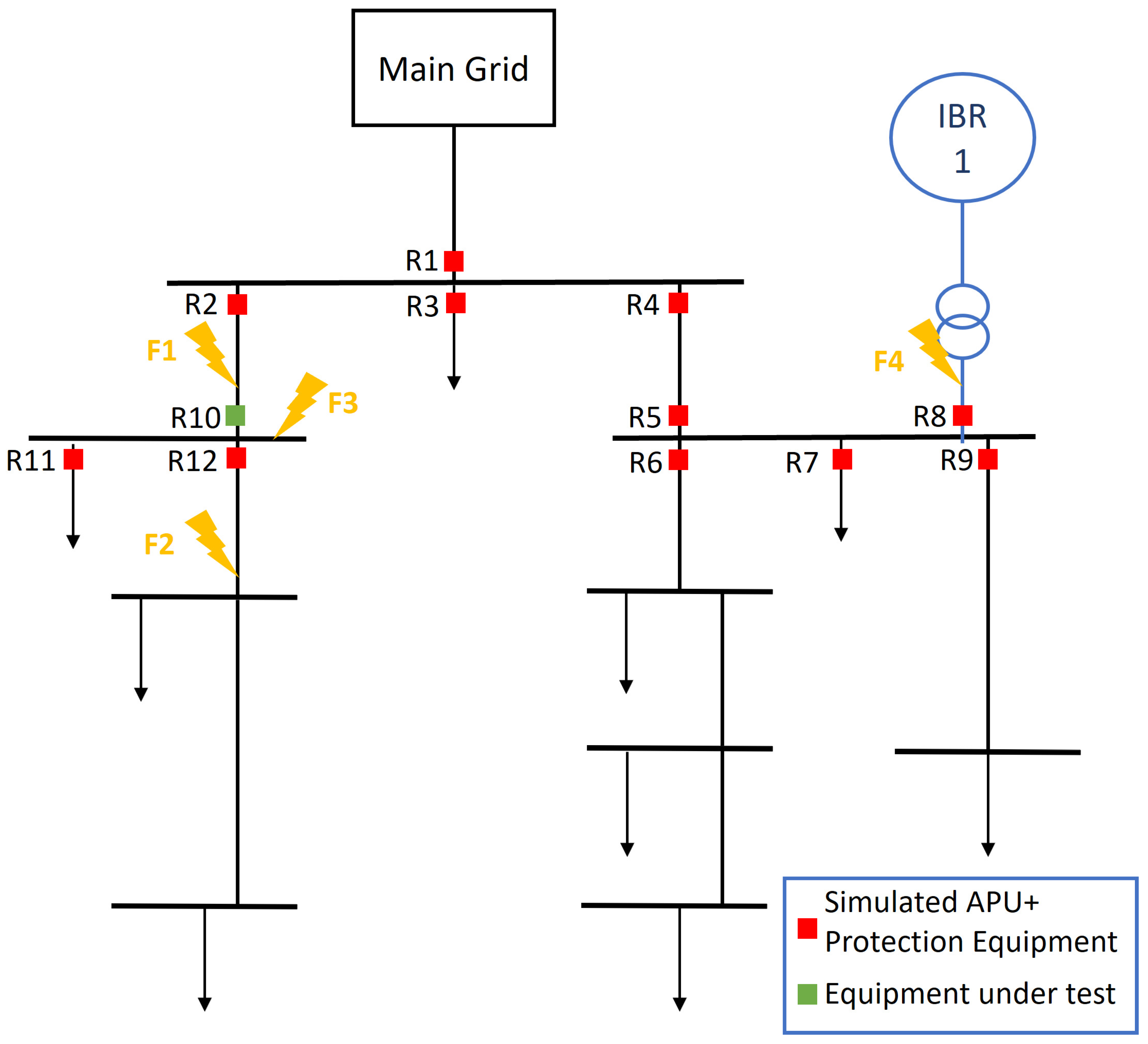
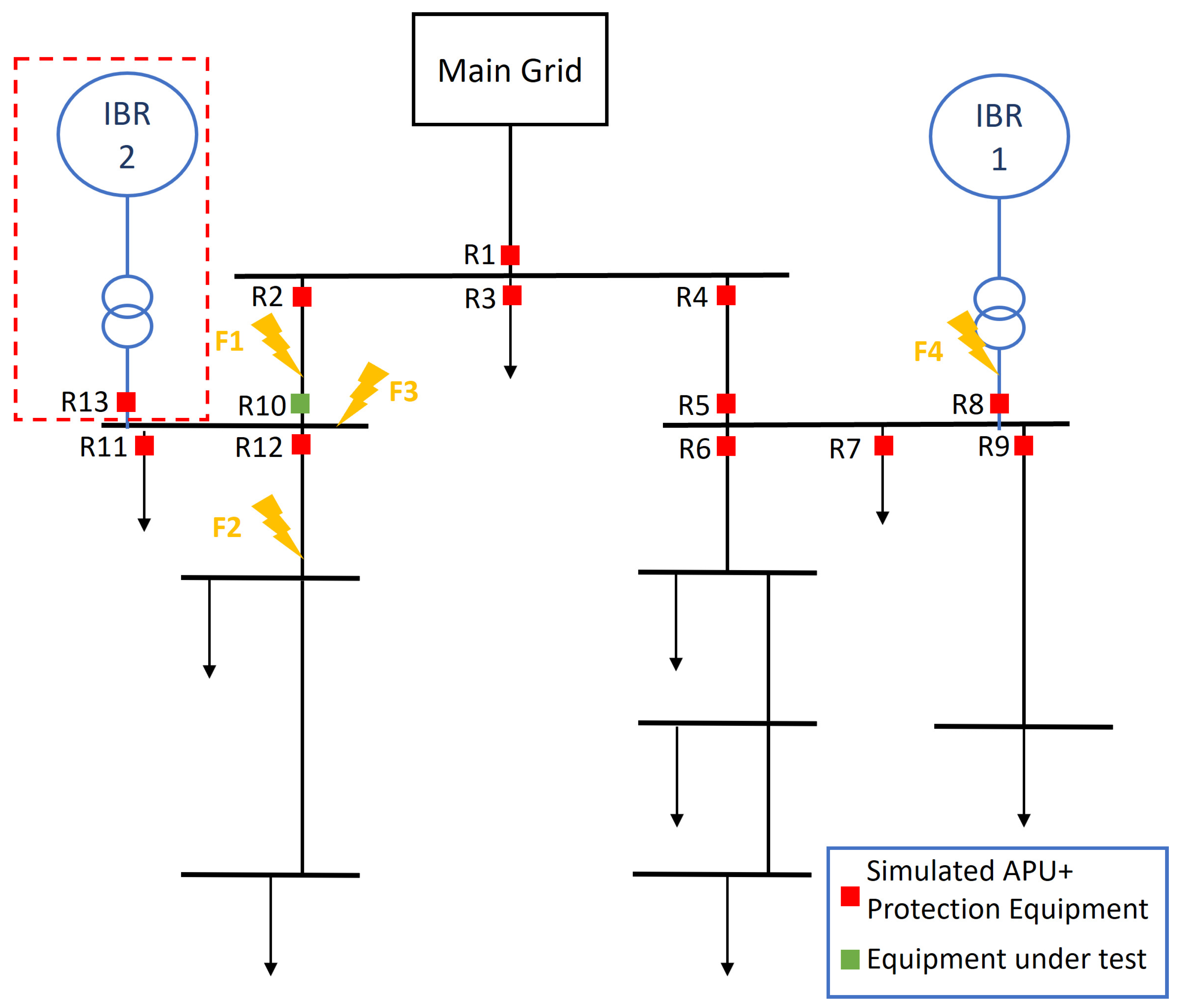
4.1. Experimental Setup
4.2. Study Cases
5. Test Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ADN | Active distribution network |
| APU | Auxiliary Protection Unit |
| CHIL | Controller Hardware-In-the-Loop |
| CIGRE | International Council on Large Electric Systems |
| CTI | Coordination time interval |
| GOOSEs | Generic Object-Oriented Substation Events |
| IBR | Inverter-based resource |
| IIDG | Inverter-interfaced distributed generator |
| MAS | Multi-agent-based system |
| PTP | Precision Time Protocol |
| SG | Setting group |
| SVs | Sampled Values |
References
- Hamanah, W.M.; Hossain, M.I.; Shafiullah, M.; Abido, M.A. AC Microgrid Protection Schemes: A Comprehensive Review. IEEE Access 2023, 11, 76842–76868. [Google Scholar] [CrossRef]
- Manson, S.; McCullough, E. Practical Microgrid Protection Solutions: Promises and Challenges. IEEE Power Energy Mag. 2021, 19, 58–69. [Google Scholar] [CrossRef]
- Wong, J.Y.R.; Tan, C.K.; Bakar, A.H.A.; Che, H.S. Selectivity Problem in Adaptive Overcurrent Protection for Microgrid with Inverter-Based Distributed Generators (IBDG): Theoretical Investigation and HIL Verification. IEEE Trans. Power Deliv. 2022, 37, 3313–3324. [Google Scholar] [CrossRef]
- Samadi, A.; Chabanloo, R.M. Adaptive coordination of overcurrent relays in active distribution networks based on independent change of relays’ setting groups. Int. J. Electr. Power Energy Syst. 2020, 120, 106026. [Google Scholar] [CrossRef]
- Chandraratne, C.; Logenthiran, T.; Naayagi, R.T.; Woo, W.L. Overview of Adaptive Protection System for Modern Power Systems. In Proceedings of the International Conference on Innovative Smart Grid Technologies, ISGT Asia, Singapore, 22–25 May 2018. [Google Scholar] [CrossRef]
- Aminifar, F.; Teimourzadeh, S.; Shahsavari, A.; Savaghebi, M.; Golsorkhi, M.S. Machine learning for protection of distribution networks and power electronics-interfaced systems. Electr. J. 2021, 34, 106886. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, D.; Yi, S. Real-Time Machine Learning-based fault Detection, Classification, and locating in large scale solar Energy-Based Systems: Digital twin simulation. Solar Energy 2023, 251, 77–85. [Google Scholar] [CrossRef]
- Sadoughi, M.; Hojjat, M.; Abardeh, M.H. Smart overcurrent relay for operating in islanded and grid-connected modes of a micro-grid without needing communication systems. Energy Syst. 2022, 13, 31–51. [Google Scholar] [CrossRef]
- Marín-Quintero, J.; Orozco-Henao, C.; Velez, J.C.; Bretas, A. Micro grids decentralized hybrid data-driven cuckoo search based adaptive protection model. Int. J. Electr. Power Energy Syst. 2021, 130, 106960. [Google Scholar] [CrossRef]
- Wang, X.; Luan, K. Setting Optimization of Distribution Network Current Protection Based on Constrained Multi-Objectives Backbone Particle Swarm Optimization. IEEJ Trans. Electr. Electron. Eng. 2024, 19, 318–326. [Google Scholar] [CrossRef]
- Ataei, M.A.; Gitizadeh, M. A distributed adaptive protection scheme based on multi-agent system for distribution networks in the presence of distributed generations. IET Gener. Transm. Distrib. 2022, 16, 1521–1540. [Google Scholar] [CrossRef]
- Barranco-Carlos, A.; Orozco-Henao, C.; Marín-Quintero, J.; Mora-Flórez, J.; Herrera-Orozco, A. Adaptive Protection for Active Distribution Networks: An Approach Based on Fuses and Relays with Multiple Setting Groups. IEEE Access 2023, 11, 31075–31091. [Google Scholar] [CrossRef]
- Gutierrez-Rojas, D.; Nardelli, P.H.J.; Mendes, G.; Popovski, P. Review of the State of the Art on Adaptive Protection for Microgrids Based on Communications. IEEE Trans. Ind. Inform. 2021, 17, 1539–1552. [Google Scholar] [CrossRef]
- Eslami, R.; Hosseini, S.A. A Comprehensive Method for Fault Detection in AC/DC Hybrid Microgrid. Electr. Power Components Syst. 2022, 50, 38–51. [Google Scholar] [CrossRef]
- dos Reis, F.B.; Pinto, J.O.C.; dos Reis, F.S.; Issicaba, D.; Rolim, J.G. Multi-agent dual strategy based adaptive protection for microgrids. Sustain. Energy Grids Netw. 2021, 27, 100501. [Google Scholar] [CrossRef]
- Dizioli, F.A.; Barra, P.H.; Menezes, T.S.; Lacerda, V.A.; Coury, D.V.; Fernandes, R.A. Multi-agent system-based microgrid protection using angular variation: An embedded approach. Electr. Power Syst. Res. 2023, 220, 109324. [Google Scholar] [CrossRef]
- Wan, H.; Li, K.K.; Wong, K.P. An Adaptive Multiagent Approach to Protection Relay Coordination With Distributed Generators in Industrial Power Distribution System. IEEE Trans. Ind. Appl. 2010, 46, 2118–2124. [Google Scholar] [CrossRef]
- Zamani, M.A.; Yazdani, A.; Sidhu, T.S. A communication-assisted protection strategy for inverter-based medium-voltage microgrids. IEEE Trans. Smart Grid 2012, 3, 2088–2099. [Google Scholar] [CrossRef]
- Wang, W.; Lu, Z. Cyber security in the Smart Grid: Survey and challenges. Comput. Netw. 2013, 57, 1344–1371. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, J.; Shahidehpour, M.; Bai, L.; Xiao, Y.; Li, H. Cooperative Operation of Distributed Energy Resources and Thermal Power Plant With a Carbon-Capture-Utilization-and-Storage System. IEEE Trans. Power Syst. 2024, 39, 1850–1866. [Google Scholar] [CrossRef]
- Duan, Y.; Zhao, Y.; Hu, J. An initialization-free distributed algorithm for dynamic economic dispatch problems in microgrid: Modeling, optimization and analysis. Sustain. Energy Grids Netw. 2023, 34, 101004. [Google Scholar] [CrossRef]
- Acevedo-Iles, M.; Romero-Quete, D.; Mojica-Nava, E.; Cortes, C.A. Distributed Protection Coordination Algorithm Applied to Overcurrent-Based Schemes. In Proceedings of the 2023 IEEE Belgrade PowerTech, Belgrade, Serbia, 25–29 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Mahamedi, B.; Zhu, J.G.; Eskandari, M.; Li, L.; Mehrizi-Sani, A. Analysis of fault response of inverter-interfaced distributed generators in sequence networks. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018. [Google Scholar] [CrossRef]
- Nimpitiwan, N.; Heydt, G.T.; Ayyanar, R.; Suryanarayanan, S. Fault current contribution from synchronous machine and inverter based distributed generators. IEEE Trans. Power Deliv. 2007, 22, 634–641. [Google Scholar] [CrossRef]
- Khan, M.A.U.; Hong, Q.; Egea-Àlvarez, A.; Dyśko, A.; Booth, C. A communication-free active unit protection scheme for inverter dominated islanded microgrids. Int. J. Electr. Power Energy Syst. 2022, 142, 108125. [Google Scholar] [CrossRef]
- Association, I.S. IEEE Std. 1547-2018; Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: Piscataway, NJ, USA, 2018.
- Rathnayake, D.B.; Akrami, M.; Phurailatpam, C.; Me, S.P.; Hadavi, S.; Jayasinghe, G.; Zabihi, S.; Bahrani, B. Grid Forming Inverter Modeling, Control, and Applications. IEEE Access 2021, 9, 114781–114807. [Google Scholar] [CrossRef]
- Furlaneto, R.; Kocar, I.; Grilo-Pavani, A.; Karaagac, U.; Haddadi, A.; Farantatos, E. Short circuit network equivalents of systems with inverter-based resources. Electr. Power Syst. Res. 2021, 199, 107314. [Google Scholar] [CrossRef]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Transient Stability Modeling of Droop-Controlled Grid-Forming Inverters with Fault Current Limiting. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Just, H. Modeling and Control of Power Converters in Weak and Unbalanced Electric Grids; Universitätsverlag der Technischen Universität Berlin: Berlin, Germany, 2021. [Google Scholar] [CrossRef]
- Kabiri, R.; Holmes, D.G.; McGrath, B.P. Control of Active and Reactive Power Ripple to Mitigate Unbalanced Grid Voltages. IEEE Trans. Ind. Appl. 2016, 52, 1660–1668. [Google Scholar] [CrossRef]
- Haddadi, A.; Zhao, M.; Kocar, I.; Farantatos, E.; Martinez, F. Impact of Inverter-Based Resources on Memory-Polarized Distance and Directional Protective Relay Elements. In Proceedings of the 2020 52nd North American Power Symposium, NAPS 2020, Tempe, AZ, USA, 11–13 April 2021. [Google Scholar] [CrossRef]
- Haddadi, A.; Kocar, I.; Mahseredjian, J.; Karaagac, U.; Farantatos, E. Performance of phase comparison line protection under inverter-based resources and impact of the german grid code. In Proceedings of the IEEE Power and Energy Society General Meeting, Montreal, QC, Canada, 2–6 August 2020. [Google Scholar] [CrossRef]
- Rezaeieh, M.R.H.; Bolandi, T.G.; Jalalat, S.M. A novel approach for resilient protection of AC microgrid based on differential phase angle of superimposed complex power. Sustain. Energy Grids Netw. 2023, 34, 101024. [Google Scholar] [CrossRef]
- Mojica-Nava, E. Optimización y Control en Grafos; Editorial UN: Bogotá, Colombia, 2022. [Google Scholar]
- Ellis-Monaghan, J.A.; Moffatt, I. Handbook of the Tutte Polynomial and Related Topics; Chapman and Hall/CRC: London, UK, 2022. [Google Scholar] [CrossRef]
- IEEE Std 242-2001; IEEE Recommended Practice for Protection and Coordination of Industrial and Commercial Power Systems (IEEE Buff Book). (Revision of IEEE Std 242-1986) [IEEE Buff Book]; IEEE: Piscataway, NJ, USA, 2001; pp. 1–710. [CrossRef]
- Kumar, P.; Rana, A.S. Review of optimization techniques for relay coordination in consideration with adaptive schemes of Microgrid. Electr. Power Syst. Res. 2024, 230, 110240. [Google Scholar] [CrossRef]
- Biswal, S.; Samantaray, S.R. An Effective Protection Coordination Scheme for Networked Microgrids Based on Nonstandard Tripping Characteristics of DOCRs. IEEE Syst. J. 2023, 17, 6588–6599. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Barra, P.; Lacerda, V.; Fernandes, R.; Coury, D. A hardware-in-the-loop testbed for microgrid protection considering non-standard curves. Electr. Power Syst. Res. 2021, 196, 107242. [Google Scholar] [CrossRef]
- IEC 61869-9; Instrument Transformers-Part 9: Digital Interface for Instrument Transformers. IEC: Geneva, Switzerland, 2016.
- IEC 61850-8-1; Communication Networks and Systems for Power Utility Automation—Part 8-1: Specific Communication Service Mapping (SCSM)—Mappings to MMS (ISO 9506-1 and ISO 9506-2) and to ISO/IEC 8802-3. IEC: Geneva, Switzerland, 2011.
- IEEE 1588; IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems. (Revision of IEEE Std 1588-2002); IEEE: Piscataway, NJ, USA, 2008.
- Zillgith, M. Libiec61850/Lib60870 Open Source Libraries for IEC 61850 and IEC 60870-5-101/104. Available online: https://libiec61850.com/ (accessed on 25 November 2023).
- Acevedo-Iles, M.; Romero-Quete, D.; Cortes, C.A. Open-Source Code of an Adaptive Protection Scheme Using LIBIEC61850. 2023. Available online: https://github.com/ManuAce9/Integral-Protection-Scheme (accessed on 15 December 2023).
- Conseil International Des Grands Réseaux Électriques. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; CIGRÉ: Paris, France, 2014; Available online: https://www.e-cigre.org/publications/detail/575-benchmark-systems-for-network-integration-of-renewable-and-distributed-energy-resources.html (accessed on 15 January 2023).
- IEEE Std C57.109-1993; IEEE Guide for Liquid-Immersed Transformers Through-Fault-Current Duration. IEEE: Piscataway, NJ, USA, 1993; pp. 1–125. [CrossRef]
- Marín-Quintero, J.; Orozco-Henao, C.; Percybrooks, W.S.; Vélez, J.C.; Montoya, O.D.; Gil-González, W. Toward an adaptive protection scheme in active distribution networks: Intelligent approach fault detector. Appl. Soft Comput. 2021, 98, 106839. [Google Scholar] [CrossRef]
- Huang, Z.; Dong, L.; Yao, X. Reversed trend comprehensive assessment-based inverter fault diagnosis under various complex interferences in microgrid. Meas. J. Int. Meas. Confed. 2024, 228, 114301. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sc | |
| 10 ms | |
| 300 ms |
| Fault Case | Scenario 1 | ||
|---|---|---|---|
| Primary Equipment Operating Time (ms) | Backup Equipment Operating Time (ms) | ||
| F1 | |||
| F2 | |||
| F3 | |||
| F4 | |||
| Fault Case | Scenario 2 | ||
|---|---|---|---|
| Primary Equipment Operating Time (ms) | Backup Equipment Operating Time (ms) | ||
| F1 | |||
| F2 | |||
| F3 | |||
| — | |||
| F4 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acevedo-Iles, M.; Romero-Quete, D.; Cortes, C.A. A Distributed Coordination Approach for Enhancing Protection System Adaptability in Active Distribution Networks. Energies 2024, 17, 4338. https://doi.org/10.3390/en17174338
Acevedo-Iles M, Romero-Quete D, Cortes CA. A Distributed Coordination Approach for Enhancing Protection System Adaptability in Active Distribution Networks. Energies. 2024; 17(17):4338. https://doi.org/10.3390/en17174338
Chicago/Turabian StyleAcevedo-Iles, Manuel, David Romero-Quete, and Camilo A. Cortes. 2024. "A Distributed Coordination Approach for Enhancing Protection System Adaptability in Active Distribution Networks" Energies 17, no. 17: 4338. https://doi.org/10.3390/en17174338
APA StyleAcevedo-Iles, M., Romero-Quete, D., & Cortes, C. A. (2024). A Distributed Coordination Approach for Enhancing Protection System Adaptability in Active Distribution Networks. Energies, 17(17), 4338. https://doi.org/10.3390/en17174338