1. Introduction
Induction motors are reliable and efficient machines, but like any mechanical or electrical equipment, they are susceptible to possible failures throughout their lifespan. The induction machines’ fault diagnosis is a crucial field in electrical engineering and industry, as these motors are widely used in a variety of industrial and commercial applications. Over the years, various techniques have been proposed for detecting different faults in these motors. One such technique is Motor Current Signature Analysis (MCSA), which has one of the most common techniques for detecting faults in these motors, such as short circuits between windings, broken or cracked rotor bars, bearing deterioration, etc. This technique can detect abnormalities in the operating condition [
1]. Other work focuses on electrical and mechanical faults, using signal processing and artificial intelligence, where MCSA is still a reference method in industry using artificial intelligence (AI) to improve the performance of traditional methods [
2].
Acoustic-based fault diagnosis techniques have been applied to three-phase induction motors, using sound signals to acquire mechanical and electrical fault signatures that are commonly presented in induction motors. To acquire the acoustic signals, some microphones are used, located in a specific ubication, and the wavelet time frequency and correlation tools are used to extract the fault signature features frequencies. Furthermore, the Self-Organizing Maps (SOM) method is used, resulting in the detection and classification of multiple faults [
3]. Using an acoustic signal technique, three scenarios are analyzed: healthy, a motor with broken bars and a defective squirrel cage ring.The recognition results are validated experimentally demonstrating the effectiveness of the acoustic technique [
4]. Negative sequence current of the induction motor is used to detect the incipient stator fault, increasing accuracy [
5].
In the literature, techniques employing artificial intelligence have emerged to address diagnostic problems in induction motors, particularly for electric rotor, stator, and mechanical bearing faults, giving satisfactory results [
6]. AI techniques are used like perceptron and self-organizing networks. The training is performed by real stator current signals. A multilayer perceptron is implemented, achieving satisfactory results [
7]. Other techniques like Adaptive Neuro-Fuzzy Inference System (ANFIS) and decision trees are used for fault diagnosis in electric motors. Algorithms like Classification and Regression Trees (CART) are implemented, having the potential for fault diagnosis in induction motors [
8].
Deep learning is another AI fault diagnosis technique that uses a combination of time–frequency distribution (TFD) and wavelet tools, outperforming traditional fault diagnosis methods in induction motors [
9]. Another proposed technique is the analysis of infrared thermal images, which is a non-invasive methodology [
10]. A non-invasive method is proposed to identify electrical and mechanical faults in asynchronous electric motors, employing a machine learning algorithm [
11]. A model to detect multiple faults in permanent magnet synchronous motors (PMSMs) is developed, like inter-turn short circuits and encoder faults [
12].
A two-dimensional convolutional neural network is used as a detection technique for induction motors, utilizing the magnitude of the fundamental frequency and the information from the third harmonic of the currents. It shows robust stator inter-turn short-circuit detection performance and identification of the faulty phase [
13]. Other research works propose a technique for detecting electrical stator faults using the measurement of cycles from the motor’s supply voltage source. The proposed algorithm measures imbalances and asymmetries caused by the fault identifying the faulty phase of a motor [
14]. Another technique performs the diagnosis of turn-to-turn faults in the windings by acquiring stator currents, which are mapped to form monochrome color images. The fault diagnosis is then carried out using convolutional artificial neural networks [
15]. Stator electrical fault detection is performed using the extended Park’s vector of the stator currents, as well as time-domain signal processing techniques such as the Hilbert transform and the discrete wavelet transform. This demonstrates a reduction in the computational complexity of the proposed algorithm [
16].
In this work, a novel non-invasive fault detection system is introduced, leveraging fuzzy logic for enhanced performance and accuracy. The system processes the input three-phase current through a MATLAB (version R2015b) toolbox that executes the proposed algorithm, based on the Mamdani fuzzy inference model. This approach enables precise and efficient fault detection. Extensive evaluation demonstrates that the proposed algorithm significantly outperforms existing methods, offering a 20% improvement in speed over traditional model-based algorithms [
17], a remarkable 74% reduction in computational time compared to AI-based algorithms [
9], and a 20% to 60% faster performance relative to current-based fault detection algorithms [
18]. In addition to its superior efficiency, the algorithm excels in diagnostic capability, accurately identifying the specific faulty winding, thereby providing a more comprehensive fault analysis. This dual advantage of speed and precise fault localization underscores the practical value of the algorithm, positioning it as a compelling alternative to existing methodologies [
9,
17,
18].
The structure of this paper is designed to guide the reader through the methodology, findings, and implications of the proposed fault detection system. The study begins with a detailed explanation of the materials and methods employed, where the phasorial analysis technique used to assess the line currents of a three-phase induction motor is thoroughly described. Following this, the results section presents the experimental findings, showcasing how these currents behave under different fault conditions and how the proposed algorithm effectively detects anomalies. A key aspect of this work is the exploration of inter-turn short-circuit faults within the motor, where the windings are intentionally modified to create various electrical fault scenarios. The discussion then delves into the significance of the observed variations in current angles, offering insights into the underlying mechanisms of fault detection. Finally, the paper concludes with a reflection on the contributions of this research, highlighting the advancements made in the detection and isolation of faults in induction motors.
2. Materials and Methods
To determine the behavior of current signals in an electric stator short-circuit of an induction motor, these can be represented by a set of phasors displaced by 120° from each other. In this way, as they rotate with angular velocity
, the projection of these phasors onto the
y-axis generates the amplitude of the corresponding current signal as shown in
Figure 1.
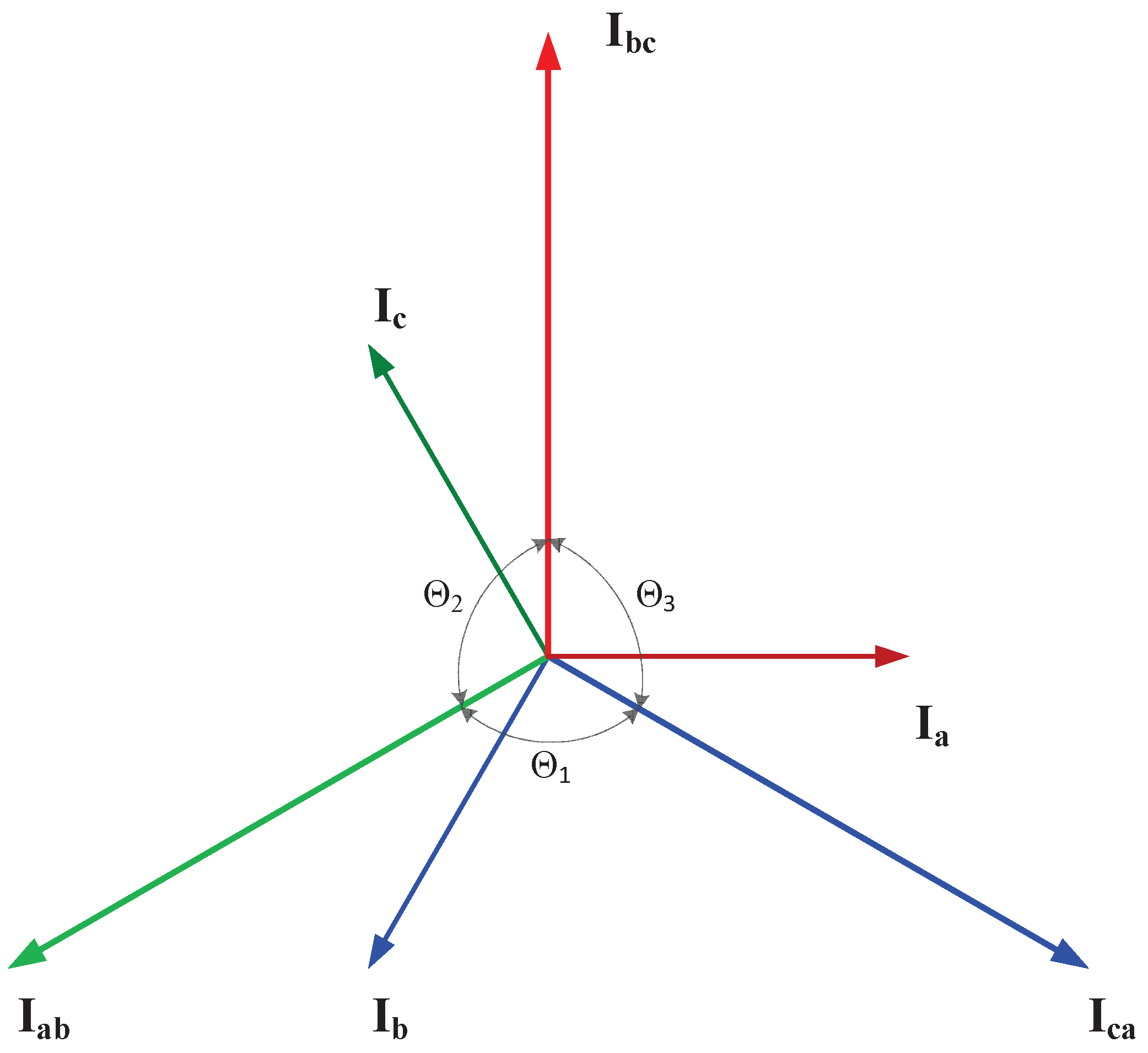
Analytical expressions for the currents in the stator in the healthy case can be expressed in phasor form by Equation (
1), and their graphical representation is shown in
Figure 2.
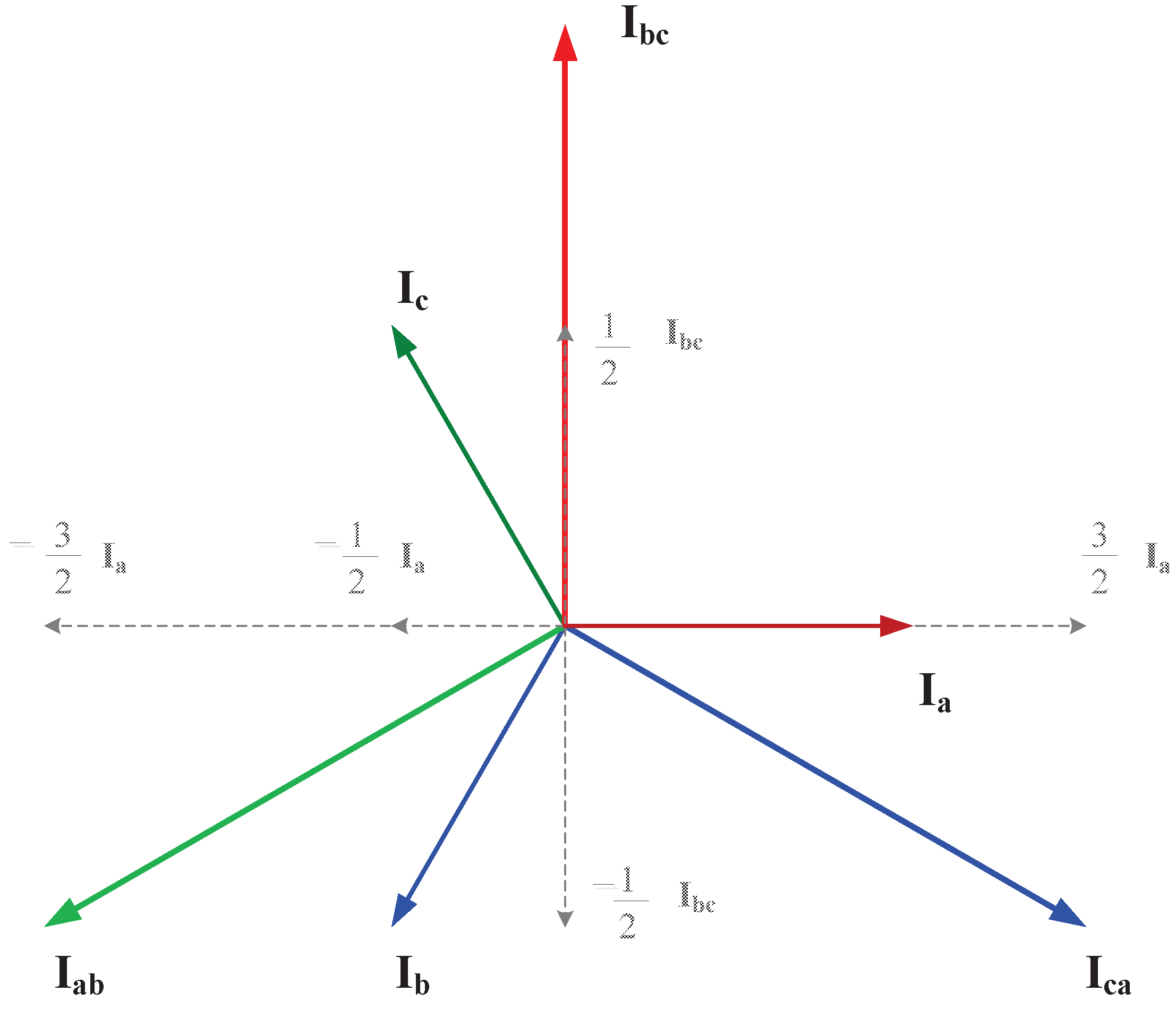
A balanced reference frame with phasorial perpendicular currents
, are shown in
Figure 3. The coordinates for each current are given by Equation (
3).
The derivation of this set of phasorial rectangular components for the phase and line currents is because the linear dependence does not exist.Consequently, each phase or line current can be expressed in terms of the other two. In other words, each phase current phasor forms a right angle with a corresponding line current phasor, allowing us to consider three rotating rectangular phasor systems whose reference frames are formed by a phase current (, , ), and a line current (, , ), respectively.
To determine the asymmetries in the phasors of the stator currents on a stator short-circuit faulty case, it can start with the scheme shown in
Figure 4.
If an inter-turn short-circuit scenario occurs corresponding to the line current
, according to Equation (
3), the current’s magnitude
remains unchanged since it is perpendicular to the fault current
that increases in magnitude. The components of the currents
and
that feed the motor stator are modified in magnitude and in phase as depicted in Equation (
3).
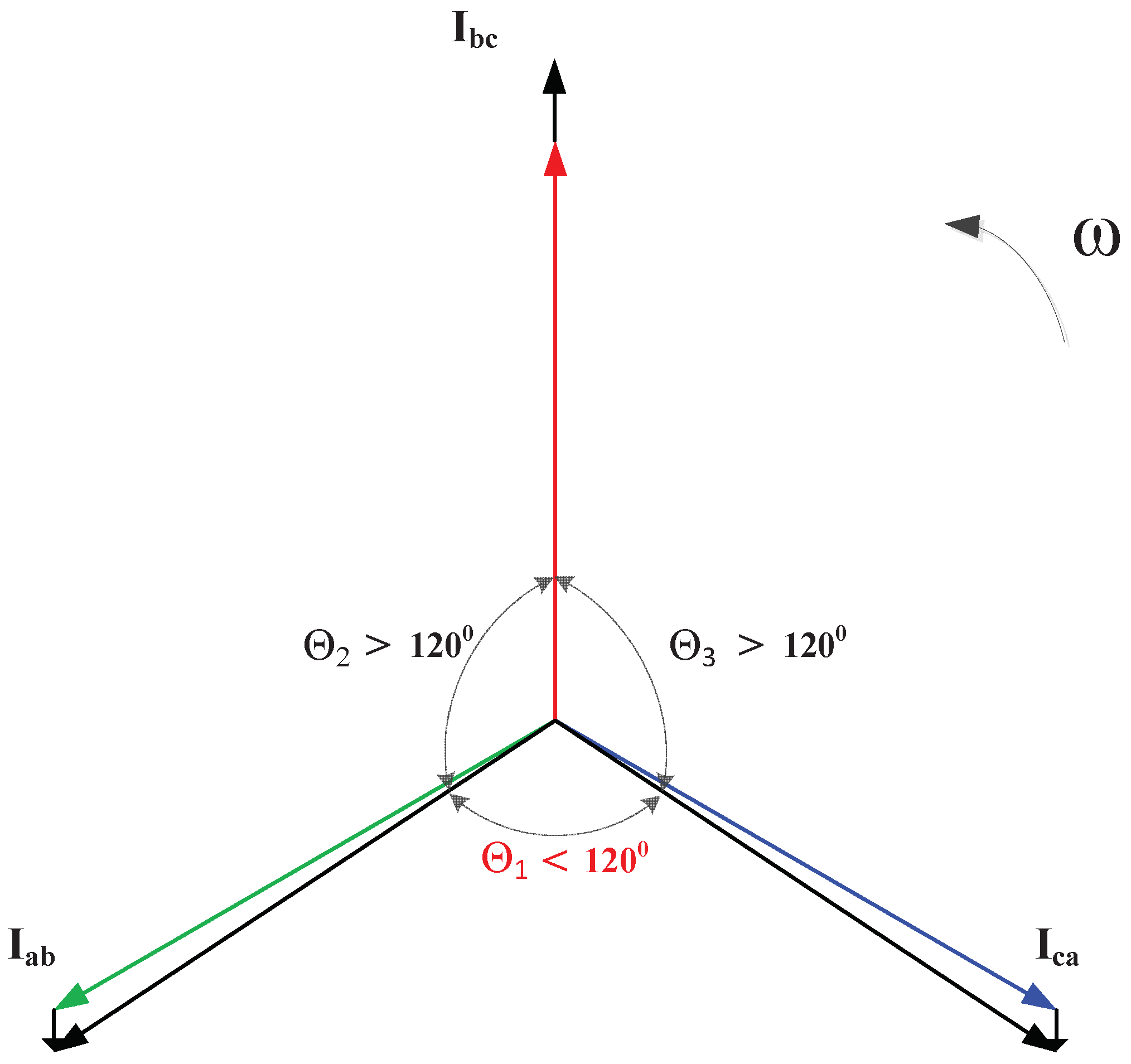
The phasor diagram of the increase in the current magnitudes on
is shown in
Figure 5.
From
Figure 5, it can be observed that there is a greater increase in the direction of the current
than in the currents
and
due to the electric fault. The latter currents only undergo variations in the direction of the fault but in the opposite direction, resulting in an increase in the magnitude of both currents and a decrease in the amplitude of the phase angle between them (
). As a consequence, there is an increase in the amplitude of the phase angle between the currents
and
(
) as well as between
and
(
).
If there are two vectors
U and
V in
n dimensions, the angle
between these two vectors
U and
V is given by Equation (
4) [
19]:
To determine the angle between currents, for example,
and
, the discrete version of the dot product between functions is used, defined by Equation (
5):
Therefore, by the phasor’s behavior and the phase angle between them, it is possible to perform the detection and isolation of the inter-turn electric stator fault scenarios.
Table 1 depicts the short-circuit fault diagnostic method.
From
Table 1, with the performed tests, and from the test bench in
Figure 6, it is observed that the angles have variations of approximately ±2.5 degrees in each fault scenario.
3. Results
To validate the technique for diagnosing short-circuit electrical faults, an experimental test bench was designed as illustrated in
Figure 6. It consists of five three-phase induction motors of 3 hp, SIEMENS (Munich, Germany), 220/440 V, 60 Hz, and 4 poles (1800 rpm) connected in a dual-star configuration. The motor is arranged to a voltage source through a full-bridge three-phase inverter, where the frequency and voltage of the power supply are controlled by a computer via the connection to the Texas Instruments (Dallas, TX, USA) TMS320F28335 Digital Signal Processor from the 2000 series, allowing real-time data acquisition. This allows computing the phasorial methodology, with better performance in processing in comparison with other techniques that use change in reference frames like image generations based on stator currents, which can affect the accuracy of the technique. The advantage of the proposed scheme is the use of simple arithmetic operations; if the sample frequency changes, increasing accuracy, a disadvantage is the need of a greater random access memory. A graphical interface is developed using Delphi 7 high-level visual language, through which it is possible to modify the sampling frequency, set at 1 kHz in this case, and the amount of data acquired in each test. One of the stator coils winding of the three-phase electric machine is altered to induce different artificial short-circuit fault scenarios. To load the induction motor, it is coupled to a direct current generator, which transfers voltage to a resistive load module.
Otherwise,
Figure 7 shows the connections to induce different fault scenarios in the induction motor, connection
represents the incipient fault, and
represents the severe fault.
Experimental results were obtained for three different short-circuit fault scenarios:
Table 2 shows the rms (root mean square) values of the Line current signature and the angle values among the Line currents for the healthy and faulty cases of each one of the five motors, where every trial represents the mean value of the 30 experiments in each machine. As observed, when the motor operates under normal condition, the Line current magnitudes
,
, and
have very similar values. Similarly, the phases among
,
, and
, formed between each pair of Line currents, are also very similar as shown in
Figure 2. Small variations in the magnitudes of the rms values are due to the motor’s inherent construction.
Table 3 shows the incipient fault results. In this case, the magnitudes of all three Line currents increase, with the increase being more noticeable in the current
corresponding to the winding with short-circuited turns (depicted in black in
Figure 5). Also, from
Table 3, it can be observed that the amplitudes of angles
and
are greater than 120°, while the amplitude of angle
is less than 120°.
When a severe short-circuit fault occurs, corresponding to the third considered case, the Line currents
,
, and
significantly increase in magnitude, with
being the highest. This causes the amplitudes of angles
and
to increase even further, while the amplitude of angle
tends to decrease as shown in
Table 4.
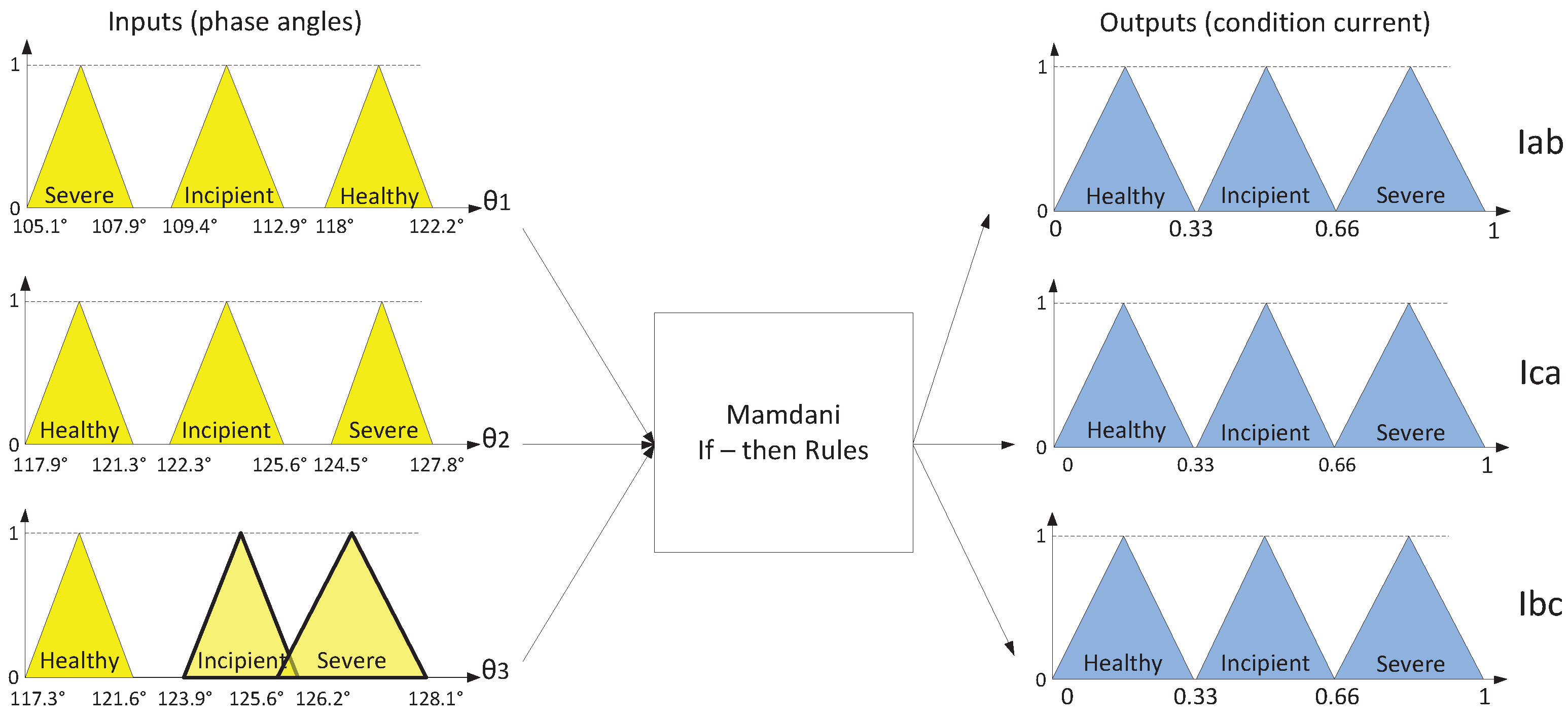
A fuzzy logic algorithm on Mamdani was developed, using the Matlab toolbox, which employs triangular membership functions as inputs, and min–max inference with if–then rules and triangular membership functions as outputs, utilizing the centroid method as shown in
Figure 8.
Figure 9 shows the sequence of the algorithm in a block diagram, and
Table 5 displays the set of fuzzy rules used.
Table 5 depicts the rule fuzzy set used to generate the diagnosis. It should be noted that this table is only for the case where
is the one experiencing the fault. When
or
are experiencing fault, the data of each of these faulty currents must be obtained. Therefore, rule 1 indicates than when the motor is operating under normal condition, the angle values among the current phasors will be approximately equal each other as shown in
Figure 8 within the range close to 120°. Thus, since
,
, and
are in the healthy threshold, rule 1 is fulfilled, so rules 2 and 3 are fulfilled when
,
, and
are at the thresholds of the incipient and severe conditions in the same figure.
For the validation of the fuzzy logic algorithm, data sets of Line currents from 30 experiments were obtained for each motor fault scenario. In other words, 30 experiments in the healthy case, 30 experiments in the incipient fault case, and 30 experiments in the severe fault case were conducted. The fuzzy logic algorithm shown in
Figure 9 was applied, introducing the angle values observed in the tables above, successfully detecting and isolating the short-circuit fault.
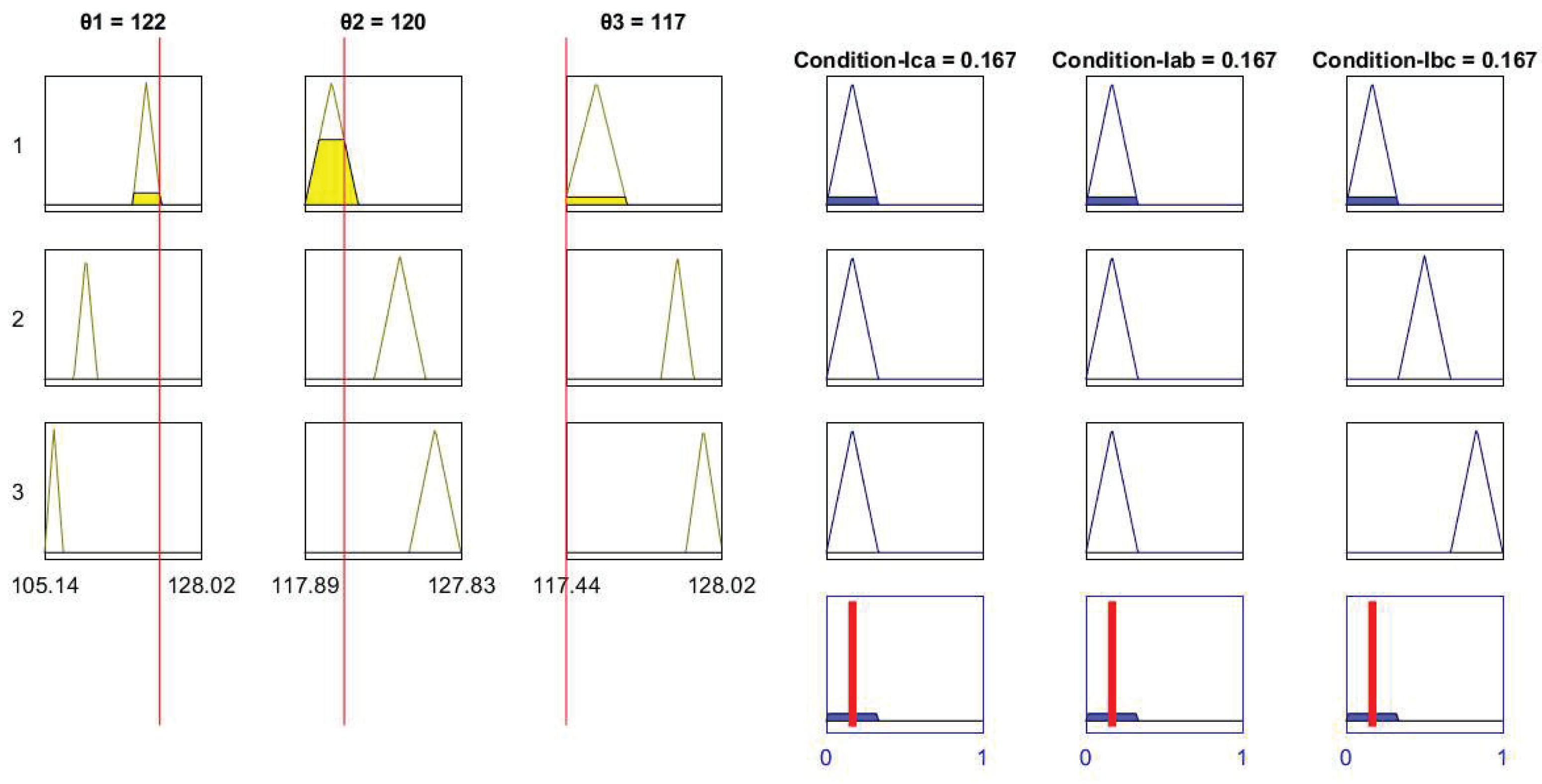
Figure 10 shows the algorithm’s response using the
,
, and
values presented in
Table 2 in trial number 1.
As observed in
Figure 10, when the induction motor is in a healthy condition, the algorithm’s response is 0.167 in each current using the centroid method, indicating a healthy motor. A single output variable named “conditionIbc” is defined, with a discourse universe ranging from 0 to 1 and consisting of three triangular membership functions. The first is the healthy condition, with a value range from 0 to 0.333; the second is the incipient fault condition, ranging from 0.333 to 0.667; and finally, the severe fault condition, with values from 0.667 to 1.
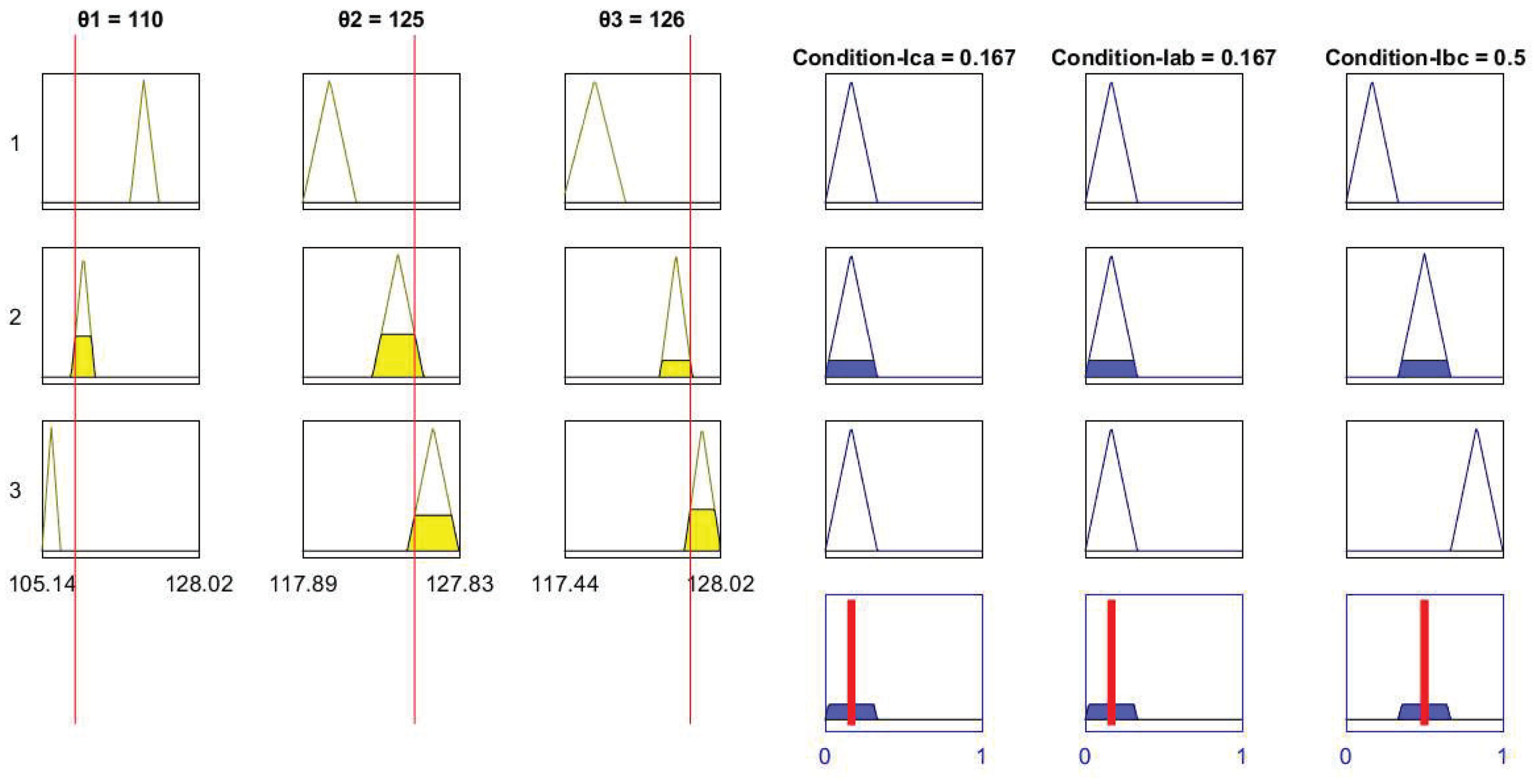
When an incipient fault is induced, the values of
,
, and
change in such a way that
reduces its amplitude, while
and
increase as observed in
Table 3. These angle values were input into the fuzzy logic algorithm, resulting in a response of 0.5 in corresponding to
as shown in
Figure 11, thus detecting and isolating the short-circuit fault.
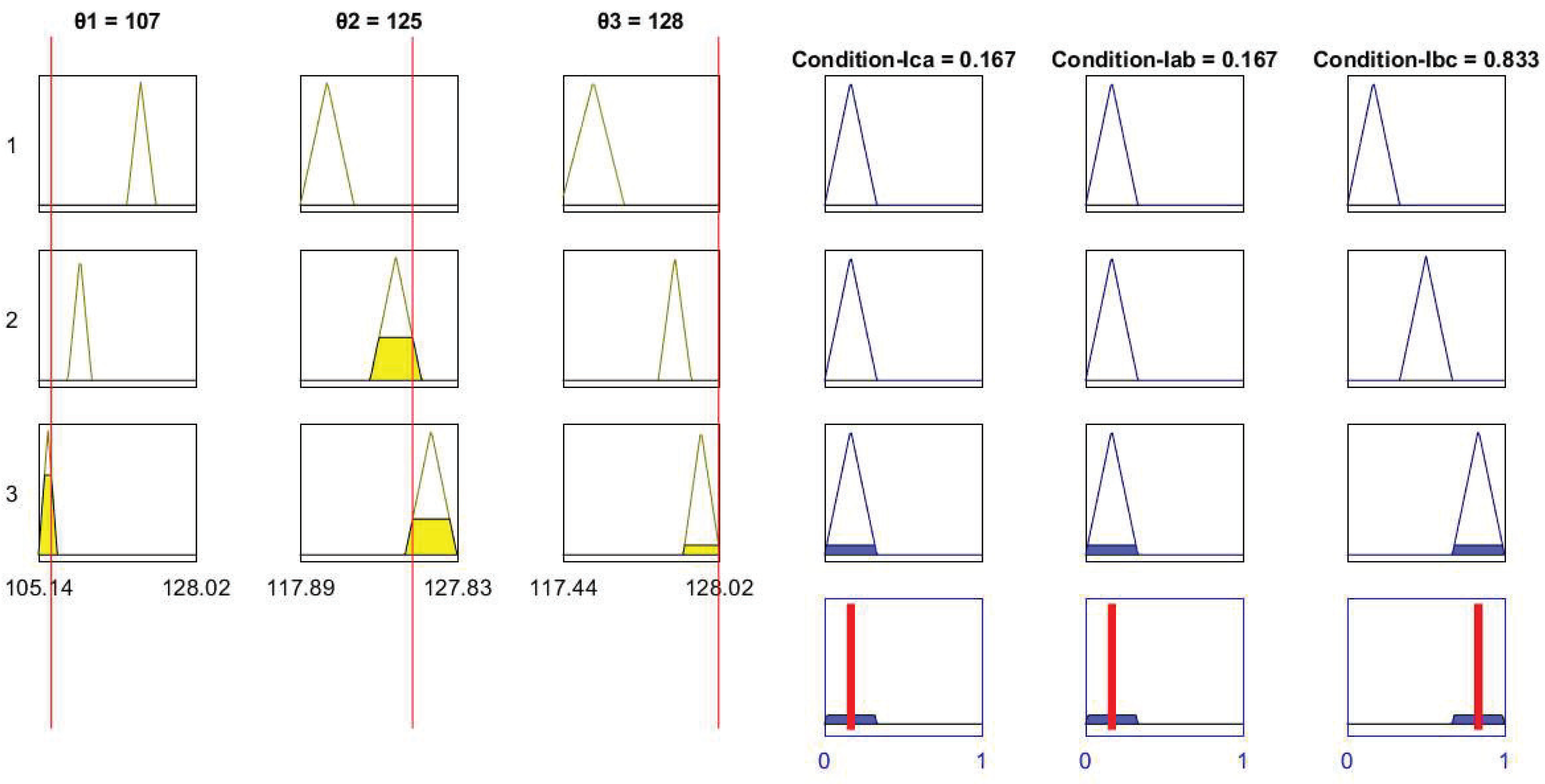
Now, when a severe fault short-circuit occurs, the algorithm’s response value is 0.833 as shown in
Figure 12.
4. Discussion
First, due to the manufacturing process of the induction motors, healthy motors can exhibit unbalanced currents, but those variations should be in a specific threshold; for this reason, in most signal processing techniques, it must be taken into account.
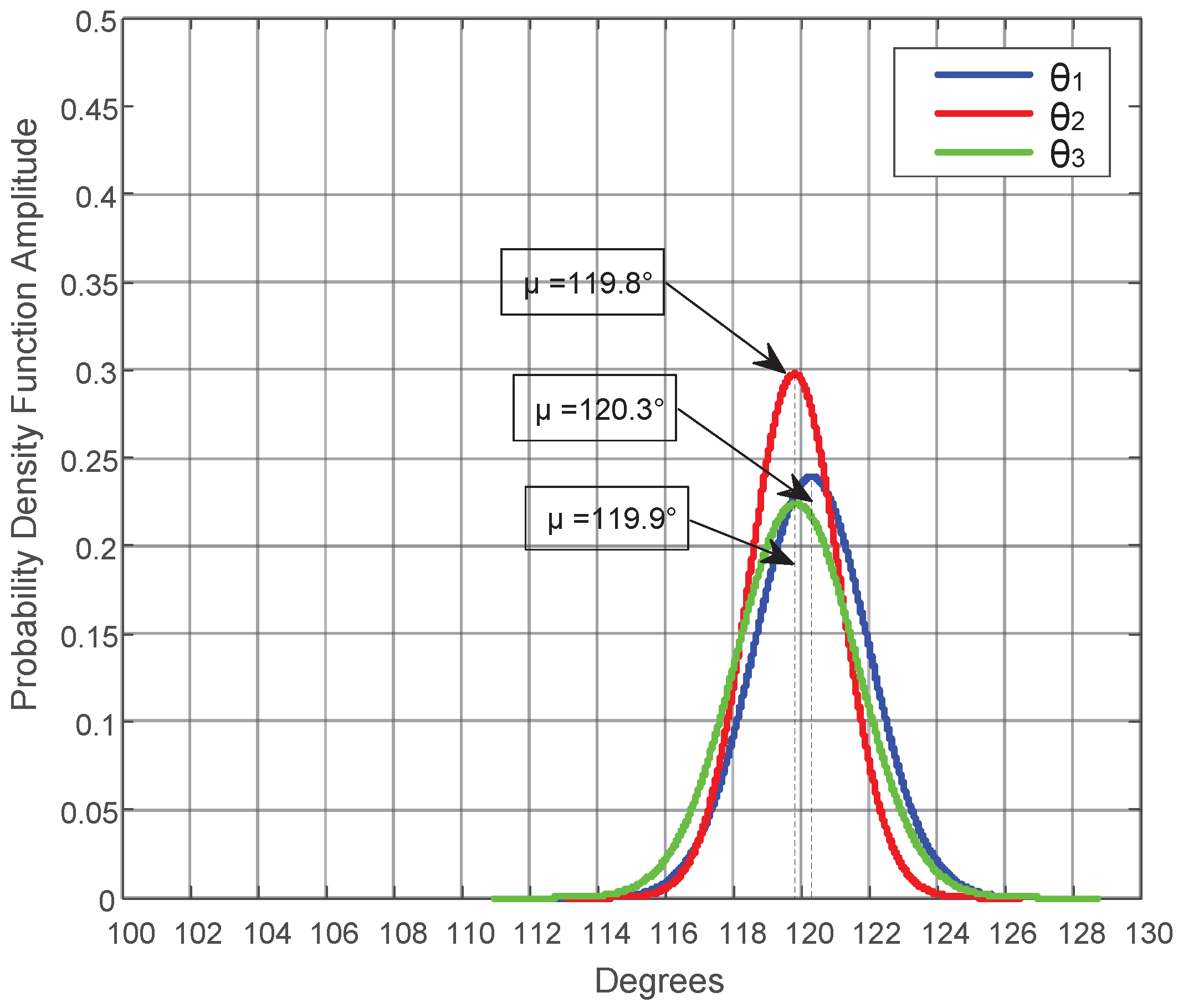
A statistical analysis is performed by computing the mean (
) of the angle values that allows the observation of the angles’ behavior according to the phasor analysis described in the methodology. Probability density functions are used as a redundant tool and are plotted using the data obtained from the fault scenarios to observe the interaction of the
,
, and
angles among the Line currents. As shown in
Figure 13, it is observed that the average values (
) initially are close to 120°.
In
Figure 14, the behavior of the probability curves confirms the results obtained through phasor analysis. When the Line current
increases, caused by an electric fault, the angles
and
grow approximately in the same magnitude as indicated by their mean values (
) of
and
, respectively. Meanwhile, the angle
opposite to the short-circuited Line current reduces to the mean value of
.
As indicated by the phasor analysis, when a severe fault short-circuit occurs, in this case, in Line current
, the amplitudes of angles
and
increase even more as demonstrated by their mean values of
and
, respectively. This is due to the increase in magnitude of the short-circuited Line current
, while the amplitude of angle
reduces to the mean value of
, which is lower compared to the incipient fault case as shown in
Figure 15.
The results of the phasor analysis method applied to current signals in the time domain significantly reduce the computational cost, fault detection, and isolation time as well as the mathematics used, compared to methods employed in the frequency domain such as Fourier analysis, wavelet analysis, and instantaneous space phasor, as well as techniques that use large data sets such as artificial intelligence.
Table 6 shows a comparison of the method, data, detection, and isolation and execution times of the most common method and their proposed scheme.
5. Conclusions
In the present work, the main contribution of this research to the field of diagnosing electrical faults in medium-power three-phase induction rotating machines is the development of a tool that leverages the phase shifts presented in the phasor system, redundantly applying the use of an artificial intelligence tool, specifically, Mamdani fuzzy logic, for this particular case. Additionally, the research incorporates widely used statistical tools with low computational cost. The sensitivity of the algorithm for detecting and isolating incipient faults is demonstrated, which, through early detection, prevents significant economic losses due to unexpected stoppages in industrial systems.
This technique is a tool that, through the analysis of the behavior of current phasors, allows to detect the variation in the angle between each pair of currents. It can determine advances and delays of the phasors when a short-circuit fault occurs. Through a fuzzy logic algorithm based on phase shifts, conditions for the classification of short-circuit faults are established.
Probability distributions show that variation of the angles are related to the results obtained by fuzzy logic. However, it should be noted that the diagnosis of faults in a motor that does not use an inverter is not guaranteed due to the imbalance of the power supply voltages in the electrical grid.
The presented methodology offers a comprehensive approach for the detection and isolation of short-circuit faults in induction motors, leveraging phasor analysis as a key tool in the diagnostic process. Although there are different methods that can detect stator short-circuit faults, not all of them are easy to implement. This method, however, can detect and isolate the fault simply by sensing the stator currents. It is important to highlight that this technique can be implemented in other electrical machines such as transformers and generators.



 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}