
A Two-Stage Multi-Objective Design Optimization Model for a 6 MW Direct-Drive Permanent Magnet Synchronous Generator

Abstract
1. Introduction
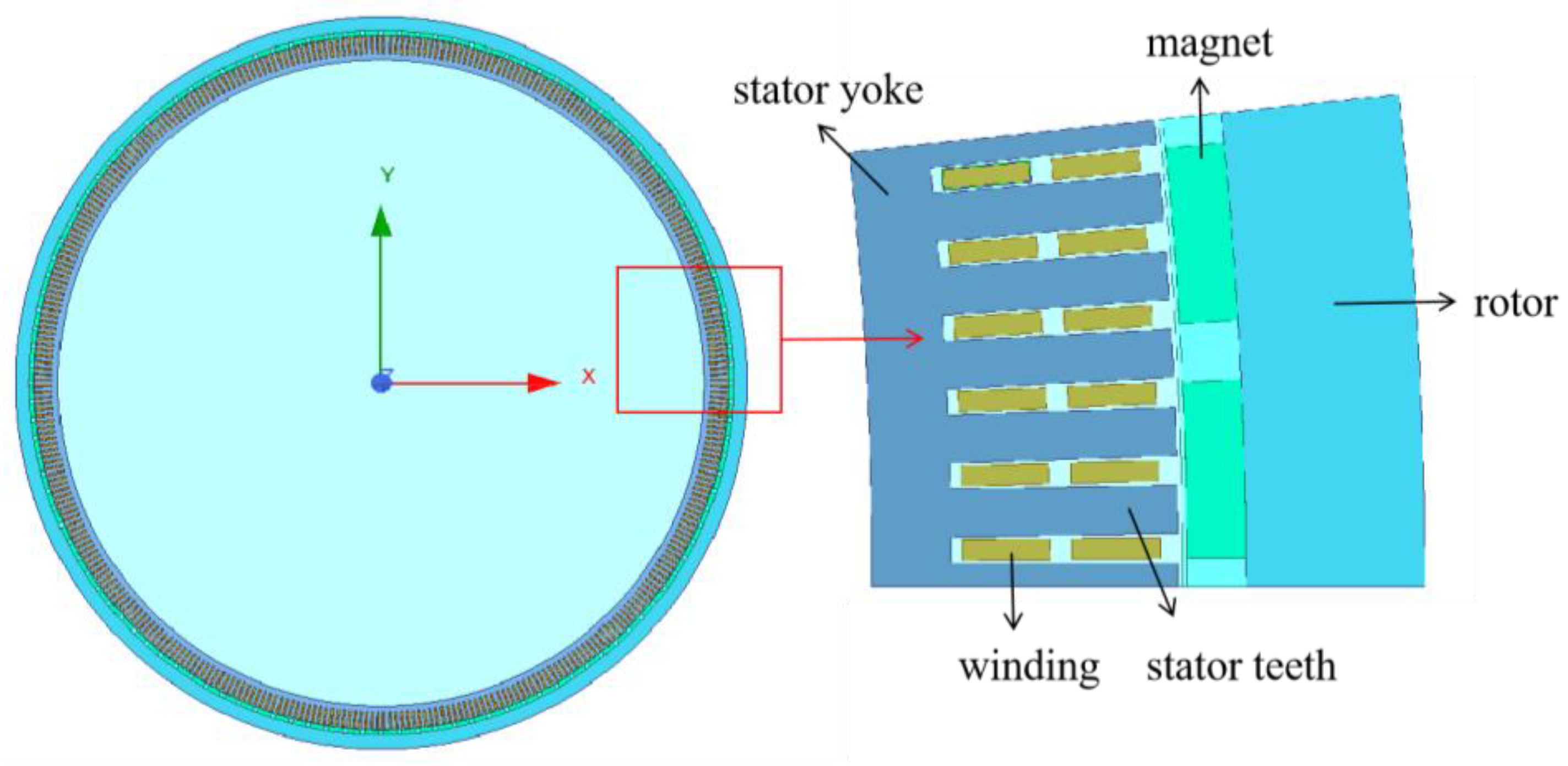
2. DDPMSG Model
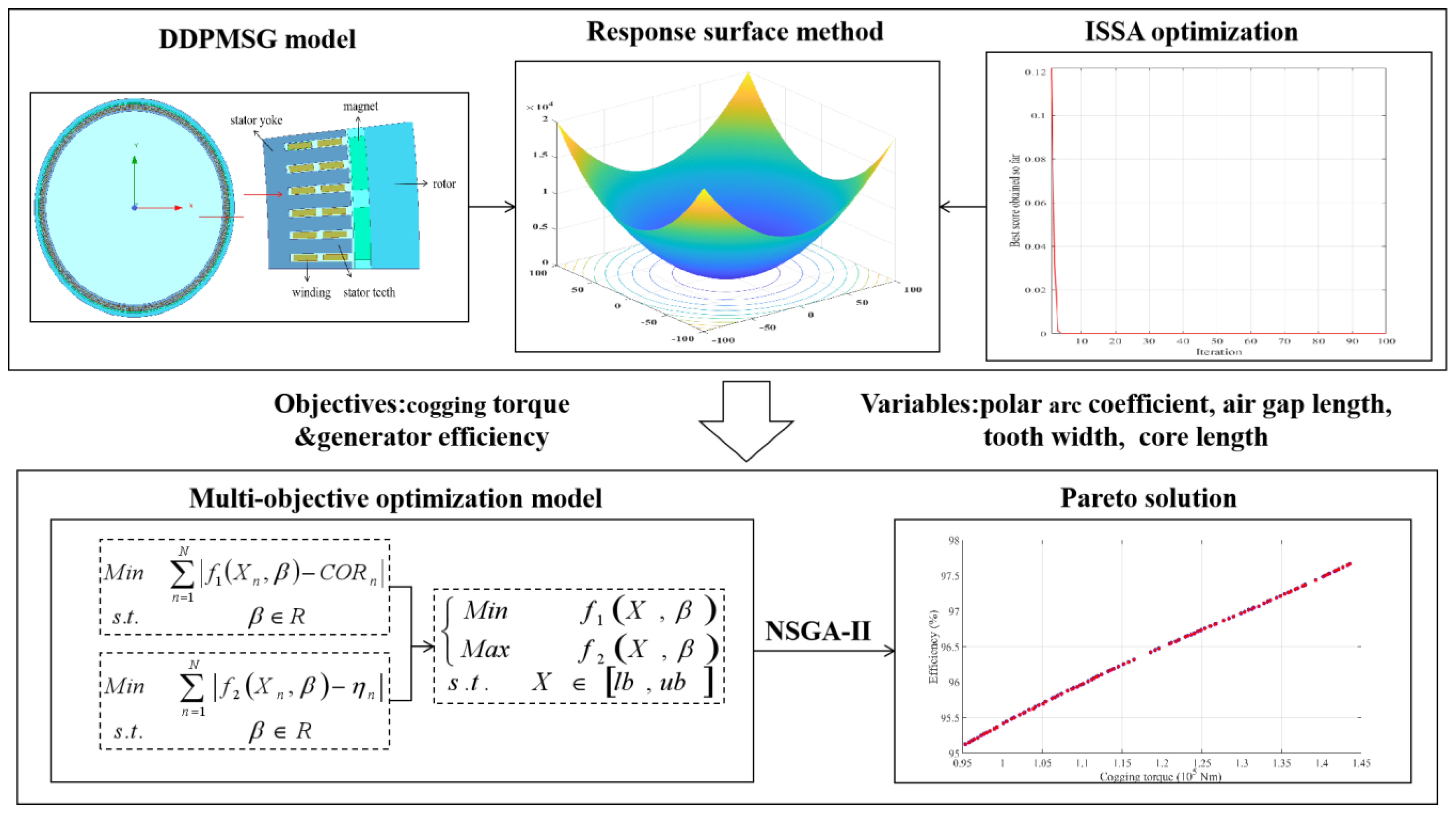
3. Two-Stage Optimization Model
3.1. First-Stage Optimization Model Based on ISSA
3.2. Second-Stage Optimization Model Based on NSGA-II
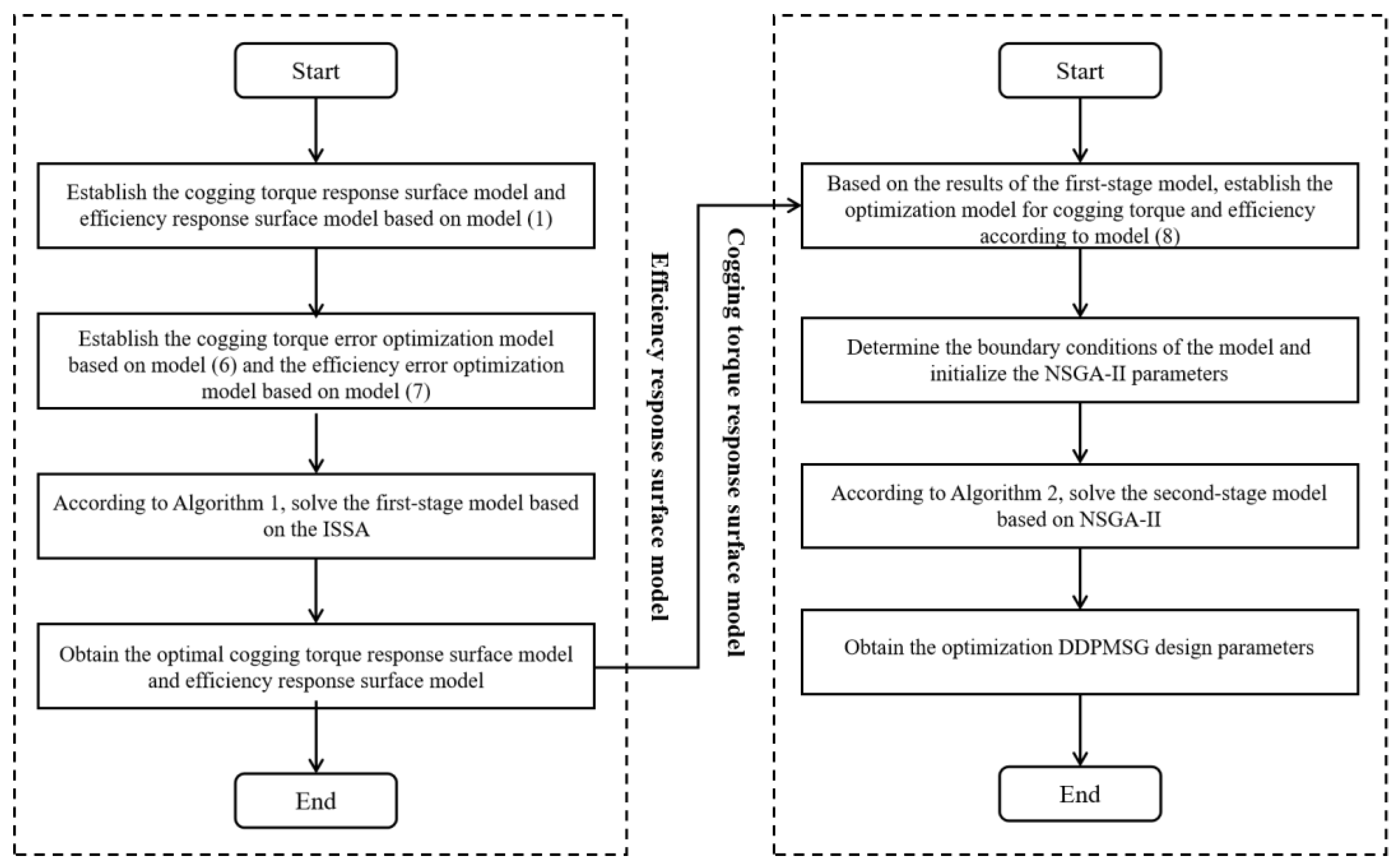
3.3. Model Solving
| Algorithm 1: The first-stage model-solving algorithm based on the ISSA |
| 1. Input the DDPMSG generator test data. |
| 2. Initialize the ISSA parameters, including the population size and number of iterations. |
| 3. Establish the response surface model for the cogging torque and efficiency according to model 1. |
| 4. Based on the experimental data, calculate the fitness of the individual population according to models (6) and (7). |
| 5. While (iter < Max_Iteration_Iter && Error > threshold) |
| 6. Update the population according to Formulas (2) to (4). |
| 7. Perform the population variation according to Formula (5). |
| 8. Calculate the fitness of new population individuals according to models (6) and (7). |
| 9. Update the optimal solution. |
| 10. End While |
| 11. Output the optimal model of the generator cogging torque and efficiency. |
| Algorithm 2: The second-stage model solving algorithm based on the NSGA-II |
| 1. Solve the first-stage optimization model based on the ISSA and obtain model (8). |
| 2. Initialize the NSGA-II parameters, including the population size, iteration number, crossover probability, and mutation probability. |
| 3. According to model (8), calculate the generator cogging torque and efficiency of the individual. |
| 4. While (iter < Max_Iteration) |
| 5. Perform the individual selection, crossover, and mutation. |
| 6. Calculate the cogging torque and generator efficiency of the new population based on model (8). |
| 7. Calculate the non-dominated sorting and crowding results. |
| 8. End While |
| 9. Output the optimal parameters of the generator. |
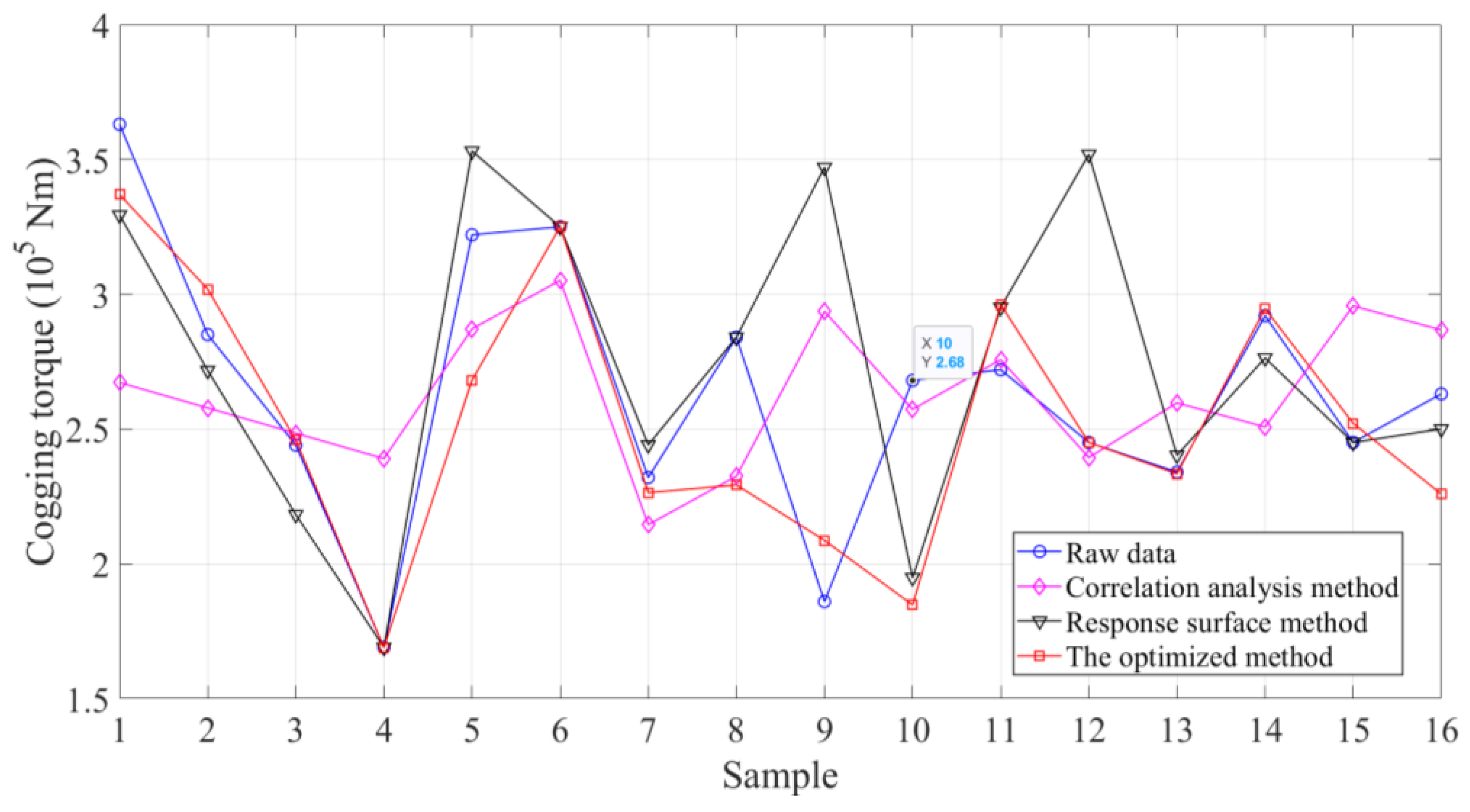
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Rated power (kW) | 6000 |
| Rated speed (rpm) | 10.5 |
| Permanent magnet model | N45H |
| Rotor outer diameter (mm) | 6434 |
| Stator outer diameter (mm) | 6098 |
| Air gap (mm) | 6 |
| Length of stator (mm) | 1640 |
| Pole number | 120 |
References
- Zakeri, B.; Paulavets, K.; Barreto-Gomez, L.; Echeverri, L.G.; Pachauri, S.; Boza-Kiss, B.; Zimm, C.; Rogelj, J.; Creutzig, F.; Ürge-Vorsatz, D.; et al. Pandemic, War, and Global Energy Transitions. Energies 2022, 15, 6114. [Google Scholar] [CrossRef]
- Haces-Fernandez, F.; Cruz-Mendoza, M.; Li, H. Onshore Wind Farm Development: Technologies and Layouts. Energies 2022, 15, 2381. [Google Scholar] [CrossRef]
- Dehghanzadeh, A.R.; Behjat, V. Dynamic modeling and experimental validation of a dual-stator PMSG for low speed applications. Gazi Univ. J. Sci. 2015, 28, 275–283. [Google Scholar]
- Dai, J.; Yang, X.; Wen, L. Development of wind power industry in China: A comprehensive assessment. Renew. Sustain. Energy Rev. 2018, 97, 156–164. [Google Scholar] [CrossRef]
- Ahn, H.; Park, H.; Kim, C.; Lee, H. A review of state-of-the-art techniques for PMSM parameter identification. J. Electr. Eng. Technol. 2020, 15, 1177–1187. [Google Scholar] [CrossRef]
- Jing, L.; Tang, W.; Wang, T.; Ben, T.; Qu, R. Performance Analysis of Magnetically Geared Permanent Magnet Brushless Motor for Hybrid Electric Vehicles. IEEE Trans. Transp. 2022, 8, 2874–2883. [Google Scholar] [CrossRef]
- Hebala, A.; Ghoneim, W.A.M.; Ashour, H.A. Detailed Design Procedures for PMSG Direct-Driven by Wind Turbines. J. Electr. Eng. Technol. 2019, 14, 251–263. [Google Scholar] [CrossRef]
- Ko, K.; Jang, S.; Park, J.; Cho, H.; You, D.-J. Electromagnetic Performance Analysis of Wind Power Generator With Outer Permanent Magnet Rotor Based on Turbine Characteristics Variation Over Nominal Wind Speed. IEEE Trans. Magn. 2011, 47, 3292–3295. [Google Scholar] [CrossRef]
- Sargazi, M.; Esmaili, M.; Jafarboland, M.; Khajavi, M. Effect of pole embrace on the cogging torque and unbalanced magnetic forces of BLDC motors. In Proceedings of the 22nd Iranian Conference on Electrical Engineering, Tehran, Iran, 20–22 May 2014. [Google Scholar]
- Li, H.; Feng, M.; Lei, L.; Geng, Y.; Wang, J. Research on Cogging Torque Reduction of Direct-Drive Type Dual-Rotor Radial Flux Permanent Magnet Synchronous Motor for Electric Propulsion Aircraft. Energies 2024, 17, 1583. [Google Scholar] [CrossRef]
- Mengesha, S.; Rajput, S.; Lineykin, S.; Averbukh, M. The Effects of Cogging Torque Reduction in Axial Flux Machines. Micromachines 2021, 12, 323. [Google Scholar] [CrossRef]
- Guo, L.; Wang, H. Research on Stator Slot and Rotor Pole Combination and Pole Arc Coefficient in a Surface-Mounted Permanent Magnet Machine by the Finite Element Method. World Electr. Veh. J. 2021, 12, 26. [Google Scholar] [CrossRef]
- Fang, H.; Chen, H. Analysis and Reduction of the Cogging Torque of Flux-Modulated Generator for Wave Energy Conversion. Energy Procedia 2019, 158, 327–332. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, M.; Chen, Z. Optimal design of stator interior permanent magnet machine with minimized cogging torque for wind power application. Energy Convers. Manag. 2008, 49, 2100–2105. [Google Scholar] [CrossRef]
- Yang, J.; Chen, J.; Yang, G.; Zhang, C. Research on cogging torque characteristics of permanent magnet synchronous machines with the same number of poles and slots. J. Magn. Magn. Mater. 2022, 561, 169730. [Google Scholar] [CrossRef]
- Lin, H.; Wang, D.; Liu, D.; Chen, J. Influence of magnet shape on torque behavior in surface-mounted permanent magnet motors. In Proceedings of the 17th International Conference on Electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 44–47. [Google Scholar]
- Mahmood, Z.; Ikram, J.; Badar, R.; Bukhari, S.S.H.; Ali Shah, M.; Memon, A.A.; Huba, M. Minimization of Torque Ripples in Multi-Stack Slotted Stator Axial-Flux Synchronous Machine by Modifying Magnet Shape. Mathematics 2022, 10, 1653. [Google Scholar] [CrossRef]
- Öztürk, N.; Dalcalı, A.; Çelik, E.; Sakar, S. Cogging torque reduction by optimal design of PM synchronous generator for wind turbines. Int. J. Hydrogen Energy 2017, 42, 17593–17600. [Google Scholar] [CrossRef]
- Kwon, J.-H.; Kim, J.-K.; Jeon, E.-S. Shape Optimization of Discontinuous Armature Arrangement PMLSM for Reduction of Thrust Ripple. Appl. Sci. 2021, 11, 11066. [Google Scholar] [CrossRef]
- Li, M.; Gabriel, F.; Alkadri, M. Kriging-Assisted Multi-Objective Design of Permanent Magnet Motor for Position Sensorless Control. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.-R.I.; Milimonfared, J. Optimum design of tubular permanent-magnet motors for thrust characteristics improvement by combined taguchi-neural network approach. IEEE Trans. Magn. 2010, 46, 4092–4100. [Google Scholar] [CrossRef]
- Liu, X.; Fu, W.N. A Dynamic Dual-Response-Surface Methodology for Optimal Design of a Permanent-Magnet Motor Using Finite-Element Method. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Multi-objective design optimization of an IPMSM based on multilevel strategy. IEEE Trans. Ind. Electron. 2020, 68, 139–148. [Google Scholar] [CrossRef]
- Giurgea, S.; Zire, H.S.; Miraoui, A. Two-Stage Surrogate Model for Finite-Element-Based Optimization of Permanent-Magnet Synchronous Motor. IEEE Trans. Magn. 2007, 43, 3607–3613. [Google Scholar] [CrossRef]
- Bhagubai, P.P.C.; Bucho, L.F.D.; Fernandes, J.F.P.; Costa Branco, P.J. Optimal Design of an Interior Permanent Magnet Synchronous Motor with Cobalt Iron Core. Energies 2022, 15, 2882. [Google Scholar] [CrossRef]
- Mahmouditabar, F.; Vahedi, A.; Mosavi, M.R.; Bafghi, M.H.B. Sensitivity analysis and multiobjective design optimization of flux switching permanent magnet motor using MLP-ANN modeling and NSGA-II algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, e12511. [Google Scholar] [CrossRef]
- Liu, X.; Lin, Q.; Fu, W. Optimal Design of Permanent Magnet Arrangement in Synchronous Motors. Energies 2017, 10, 1700. [Google Scholar] [CrossRef]
- Jung, S.-Y.; Jung, H.; Hahn, S.-C.; Jung, H.-K.; Lee, C.-G. Opitmal design of direct-driven PM wind generator for maximum annual energy production. IEEE Trans. Magn. 2008, 44, 1062–1065. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.; Kim, J.W.; Lee, C.G.; Jung, S.Y. Intelligent Memetic Algorithm Using GA and Guided MADS for the Optimal Design of Interior PM Synchronous Machine. In Proceedings of the Digests of the 2010 14th Biennial IEEE Conference on Electromagnetic Field Computation, Chicago, IL, USA, 9–12 May 2010. [Google Scholar]
- Puri, V.; Chauhan, Y.K.; Singh, N. A comparative design study and analysis of inner and outer rotor permanent magnetsynchronous machine for power generation in vertical axis wind turbine using GSA and GSA-PSO. Sustain. Energy Technol. Assess. 2017, 23, 136–148. [Google Scholar]
- Du, J.; Wang, X.; Lv, H. Optimization of magnet shape based on efficiency map of IPMSM for EVs. IEEE Trans. Appl. Supercond. 2016, 26, 1–7. [Google Scholar] [CrossRef]
- Wang, S.-C.; Nien, Y.-C.; Huang, S.-M. Multi-Objective Optimization Design and Analysis of V-Shape Permanent Magnet Synchronous Motor. Energies 2022, 15, 3496. [Google Scholar] [CrossRef]
- Meo, S.; Zohoori, A.; Vahedi, A. Optimal design of permanent magnet flux switching generator for wind applications via artificial neural network and multi-objective particle swarm optimization hybrid approach. Energy Convers. Manag. 2016, 110, 230–239. [Google Scholar] [CrossRef]
- Fard, J.R.; Ardebili, M. Optimal Design and Analysis of the Novel Low Cogging Torque Axial Flux-Switching Permanent-Magnet Motor. Electr. Power Compon. Syst. 2019, 46, 1330–1339. [Google Scholar] [CrossRef]
- Htet, T.Z.; Zhao, Z.; Gu, Q. Design Analysis of Direct-Driven PMSG in Wind Turbine Application. In Proceedings of the 2016 International Conference on System Reliability and Science, Paris, France, 15–18 November 2016. [Google Scholar]


| Parameter | Range |
|---|---|
| Polar arc coefficient | 0.65~0.8 |
| Air gap length | 2.5~4 mm |
| Tooth width | 30~37.5 mm |
| Core length | 1450~1600 mm |
| No. | Polar Arc Coefficient/mm | Air Gap Length/mm | Tooth Width/mm | Core Length/mm | Cogging Torque/(×105 Nm) | Efficiency/% |
|---|---|---|---|---|---|---|
| 1 | 0.65 | 2.5 | 30 | 1450 | 3.63 | 95.6 |
| 2 | 0.65 | 3 | 32.5 | 1500 | 2.85 | 95.5 |
| 3 | 0.65 | 3.5 | 35 | 1550 | 2.44 | 96.01 |
| 4 | 0.65 | 4 | 37.5 | 1600 | 1.69 | 97.35 |
| 5 | 0.7 | 2.5 | 32.5 | 1550 | 3.22 | 96.88 |
| 6 | 0.7 | 3 | 30 | 1600 | 3.25 | 97.45 |
| 7 | 0.7 | 3.5 | 37.5 | 1450 | 2.32 | 95.36 |
| 8 | 0.7 | 4 | 35 | 1500 | 2.84 | 96.32 |
| 9 | 0.75 | 2.5 | 35 | 1600 | 1.86 | 97.23 |
| 10 | 0.75 | 3 | 37.5 | 1550 | 2.68 | 97.34 |
| 11 | 0.75 | 3.5 | 30 | 1500 | 2.72 | 97.23 |
| 12 | 0.75 | 4 | 32.5 | 1450 | 2.45 | 95.67 |
| 13 | 0.8 | 2.5 | 37.5 | 1500 | 2.34 | 97.5 |
| 14 | 0.8 | 3 | 35 | 1450 | 2.92 | 96.88 |
| 15 | 0.8 | 3.5 | 32.5 | 1600 | 2.45 | 97.02 |
| 16 | 0.8 | 4 | 30 | 1550 | 2.63 | 95.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, D.; Wu, X.; Meng, H.; Su, Y. A Two-Stage Multi-Objective Design Optimization Model for a 6 MW Direct-Drive Permanent Magnet Synchronous Generator. Energies 2024, 17, 4147. https://doi.org/10.3390/en17164147
Tian D, Wu X, Meng H, Su Y. A Two-Stage Multi-Objective Design Optimization Model for a 6 MW Direct-Drive Permanent Magnet Synchronous Generator. Energies. 2024; 17(16):4147. https://doi.org/10.3390/en17164147
Chicago/Turabian StyleTian, De, Xiaoxuan Wu, Huiwen Meng, and Yi Su. 2024. "A Two-Stage Multi-Objective Design Optimization Model for a 6 MW Direct-Drive Permanent Magnet Synchronous Generator" Energies 17, no. 16: 4147. https://doi.org/10.3390/en17164147
APA StyleTian, D., Wu, X., Meng, H., & Su, Y. (2024). A Two-Stage Multi-Objective Design Optimization Model for a 6 MW Direct-Drive Permanent Magnet Synchronous Generator. Energies, 17(16), 4147. https://doi.org/10.3390/en17164147