
Thermal Imaging-Based Abnormal Heating Detection for High-Voltage Power Equipment


Abstract
1. Introduction
2. Related Work
2.1. Instance Segmentation
2.1.1. Mask-Based Methods
2.1.2. Contour-Based Methods
2.2. Fault Detection of Power Equipment
2.2.1. Detection and Segmentation of Power Equipment
2.2.2. Fault Detection of Power Equipment
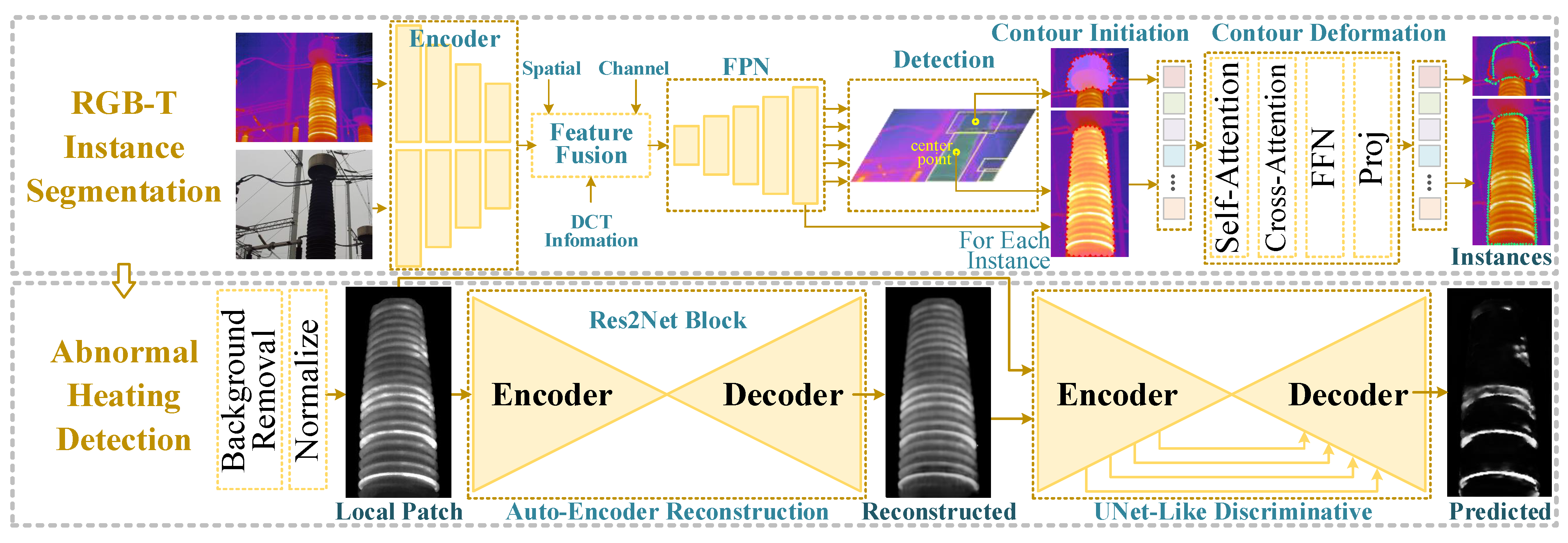
- The contour-based RGB-T instance segmentation method is proposed to achieve all-day capability. The multi-modality features are fused from spatial, channel, and frequency domains, which could handle modality differences and extract complementary information. The transformer decoder is utilized to evolve contour points via long-range dependencies across whole patches rather than connections between themselves;
- After extracting instance information of power equipment and suppressing background interference, the auto-encoder network is built to learn the distribution from positive samples and reconstruct input images. Then, the UNet-like network is built to learn the joint representation of original and reconstructed images, which could capture the lost information during the reconstruction process and segment abnormal heating regions;
- The proposed instance segmentation and abnormal heating detection methods are fully evaluated on the self-built datasets. The extensive results of experiments demonstrate the superiority of the proposed RGB-T instance segmentation method and the practicality of the proposed abnormal heating detection strategy for various kinds of power equipment.
3. Proposed Method
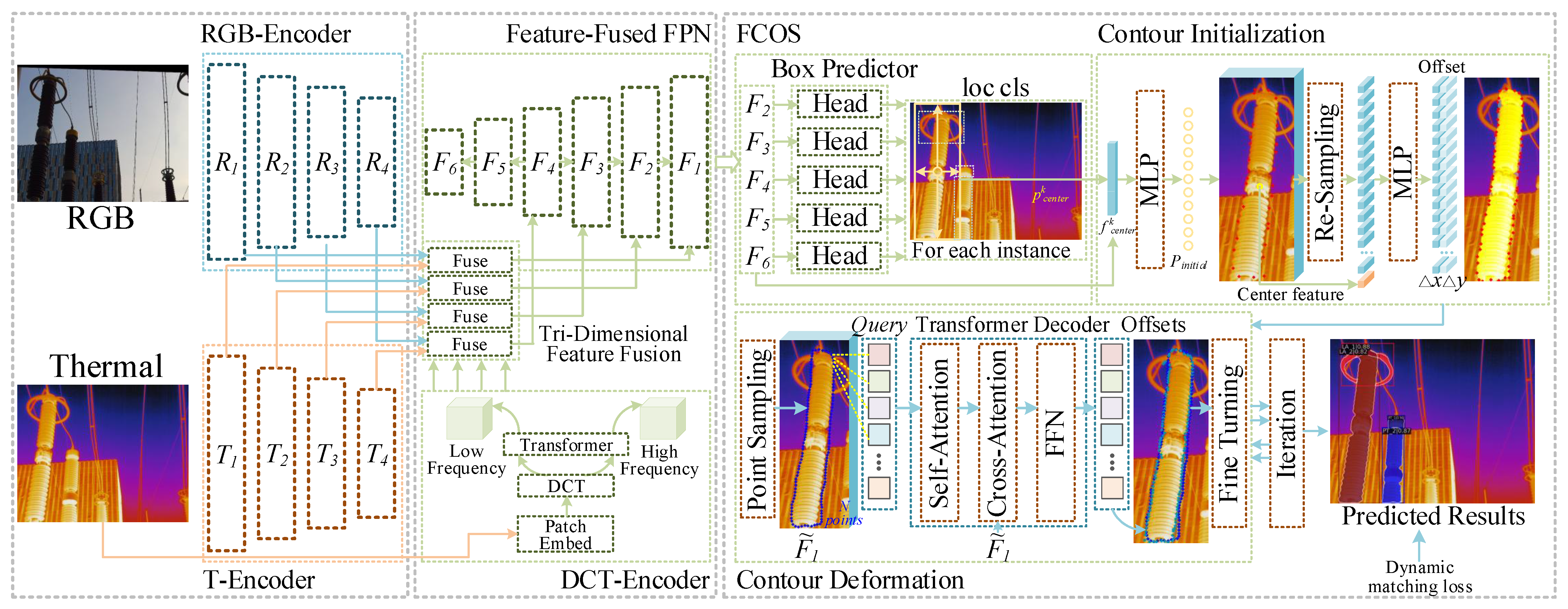
3.1. Contour-Based RGB-T Instance Segmentation Network
3.1.1. Network Architecture
3.1.2. Tri-Dimensional Feature Fusion Module
3.1.3. Object Detection Module
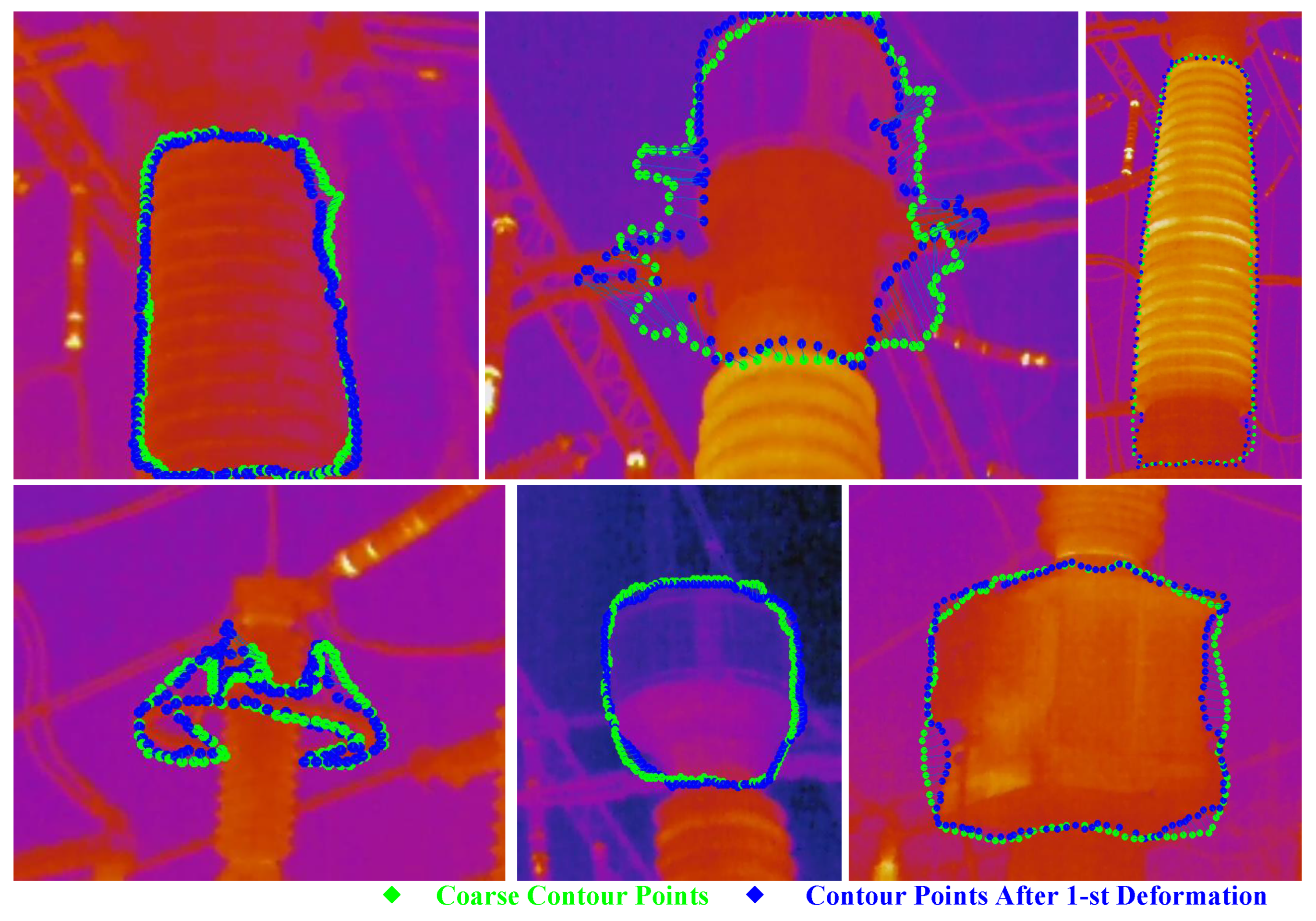
3.1.4. Transformer-Based Contour Deformation
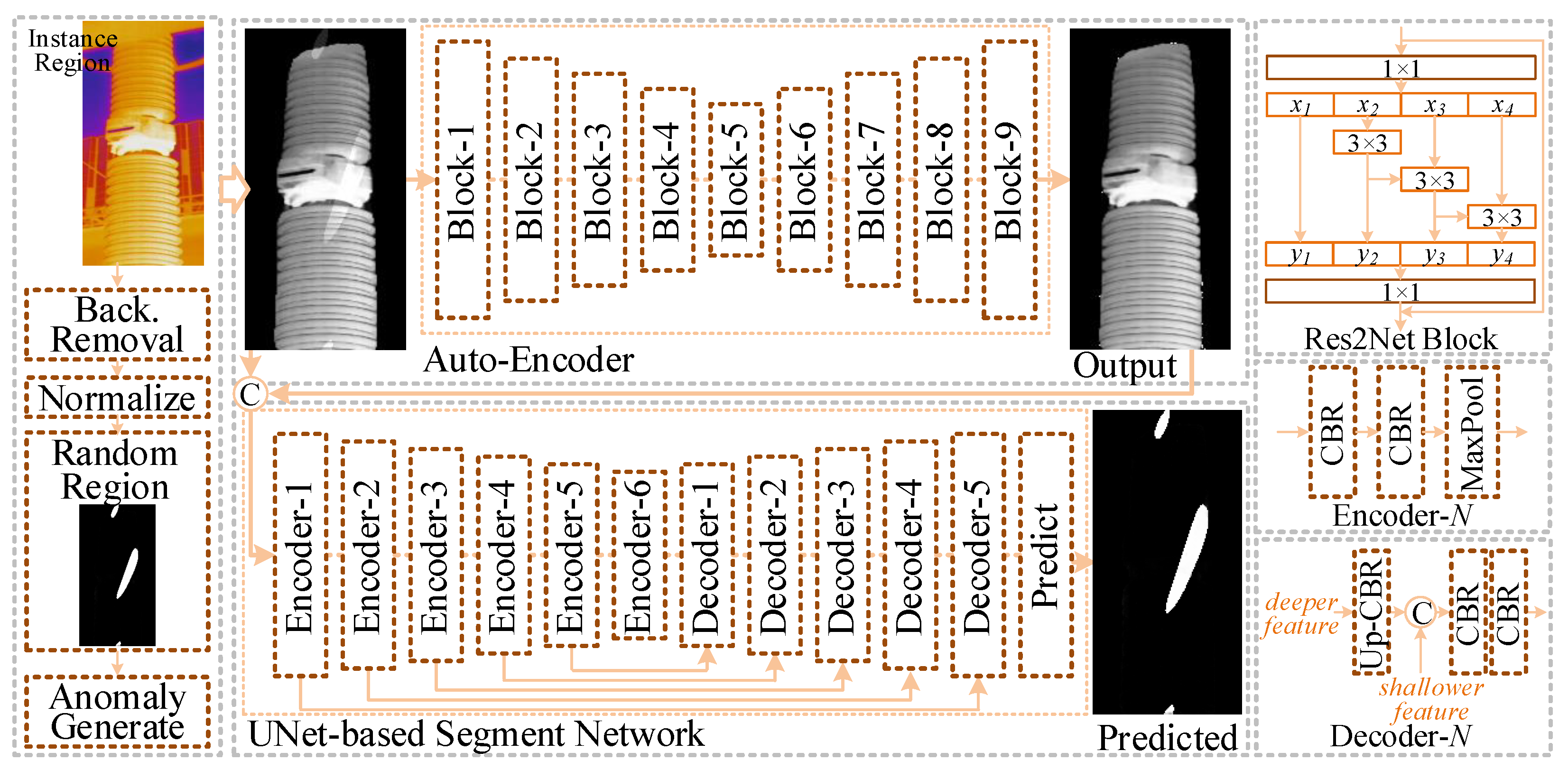
3.2. Reconstruction-Guided Abnormal Heating Detection
3.2.1. Network Framework
3.2.2. Auto-Encoder Based Reconstruction Network
3.2.3. UNet-like Discrimination Network
3.2.4. Random Argument Strategy
4. Experimental Results
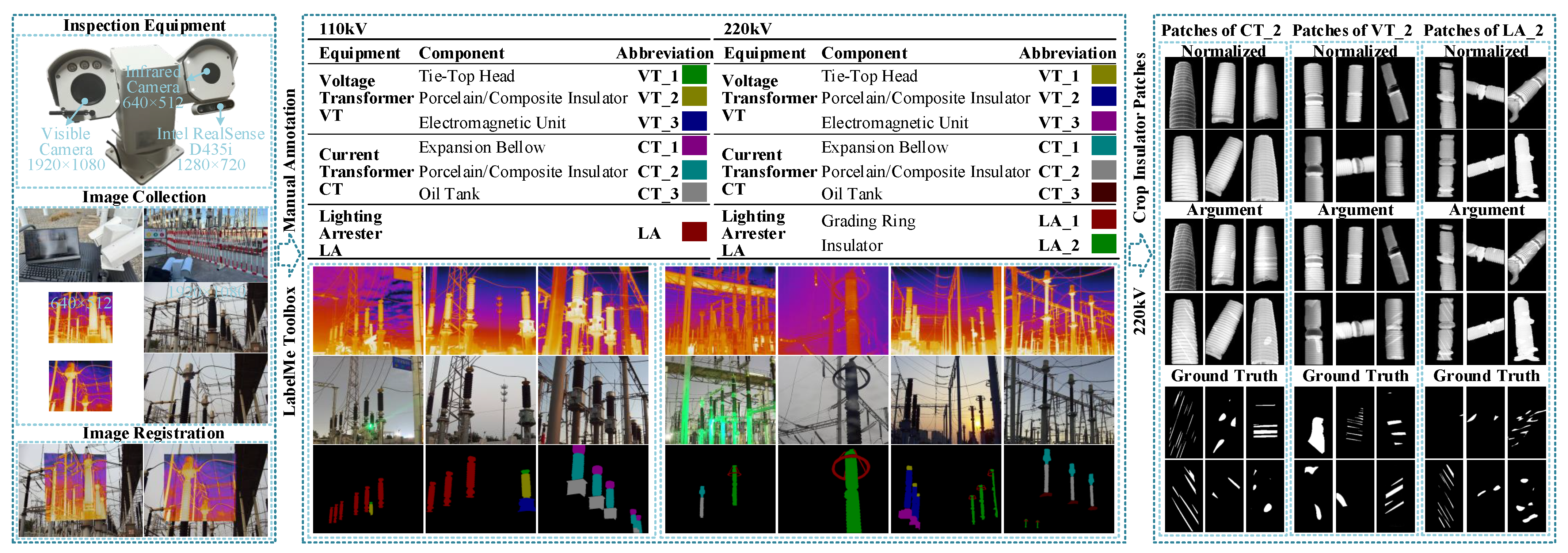
4.1. Dataset Construction
4.2. Effectiveness of the Instance Segmentation Network
4.2.1. Implementation Details and Evaluation Metrics
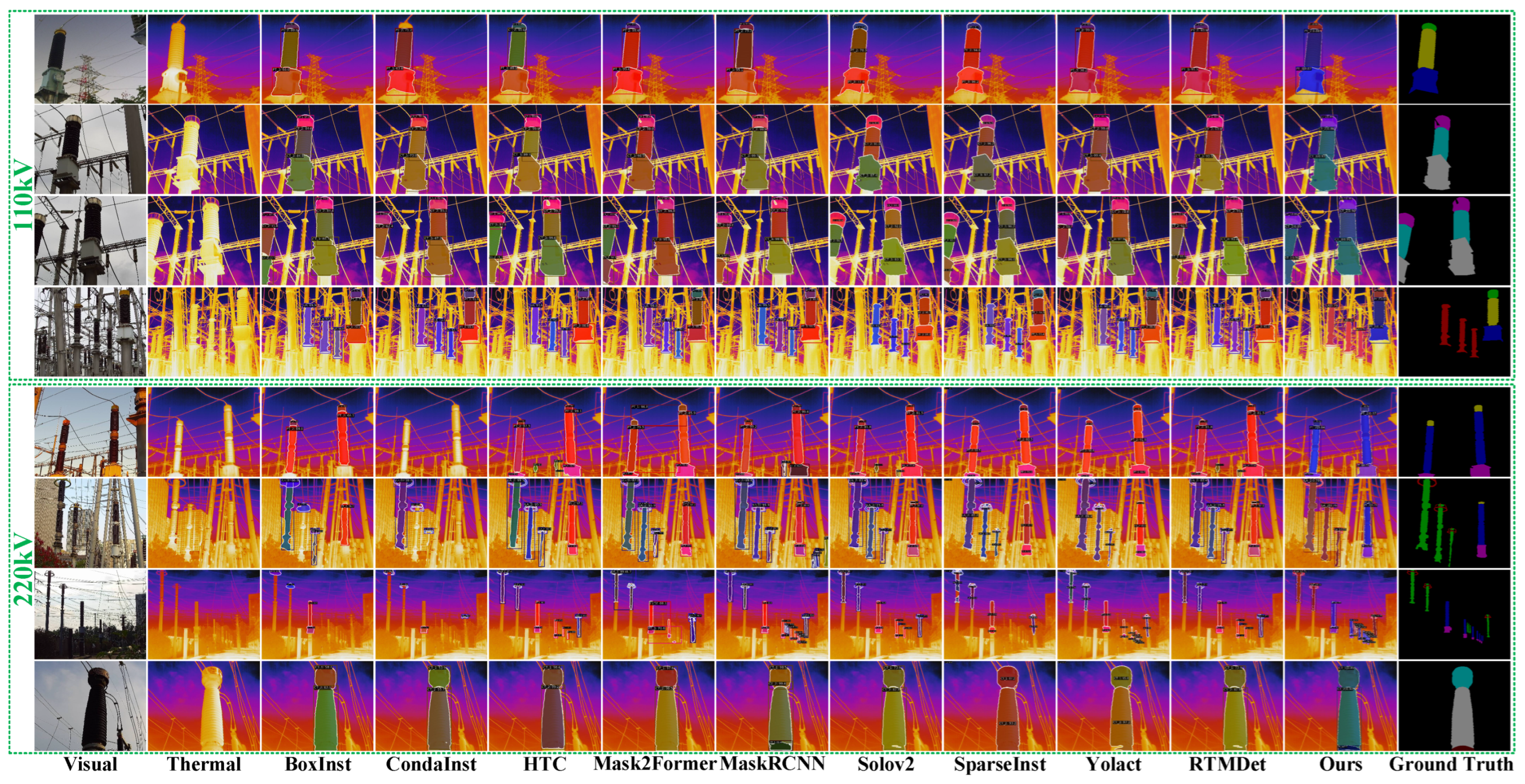
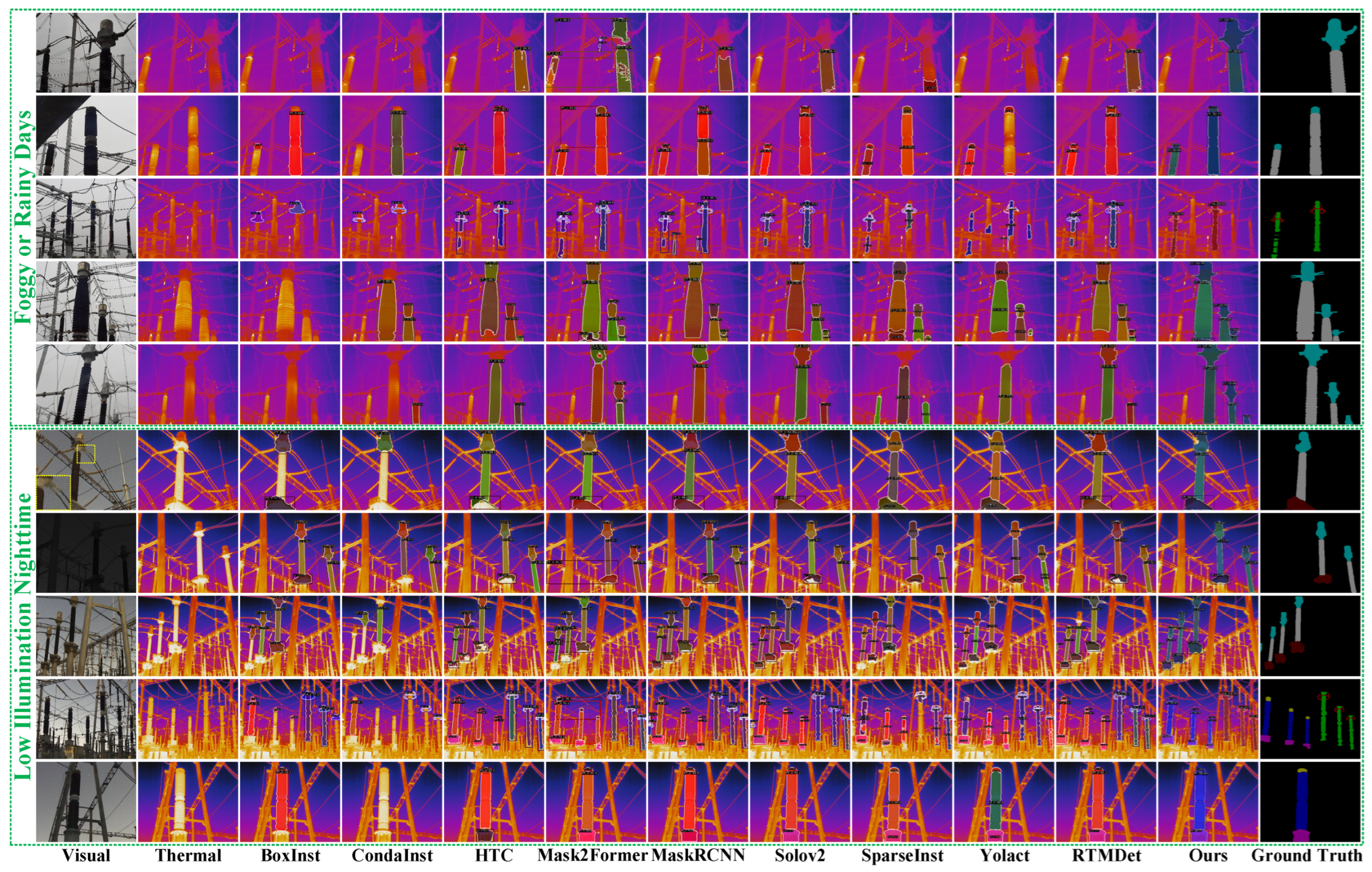
4.2.2. Qualitative Evaluation
4.2.3. Quantitative Evaluation
4.2.4. Ablation Studies
4.3. Effectiveness of the Abnormal Heating Detection Method
4.3.1. Implementation Details and Evaluation Metrics
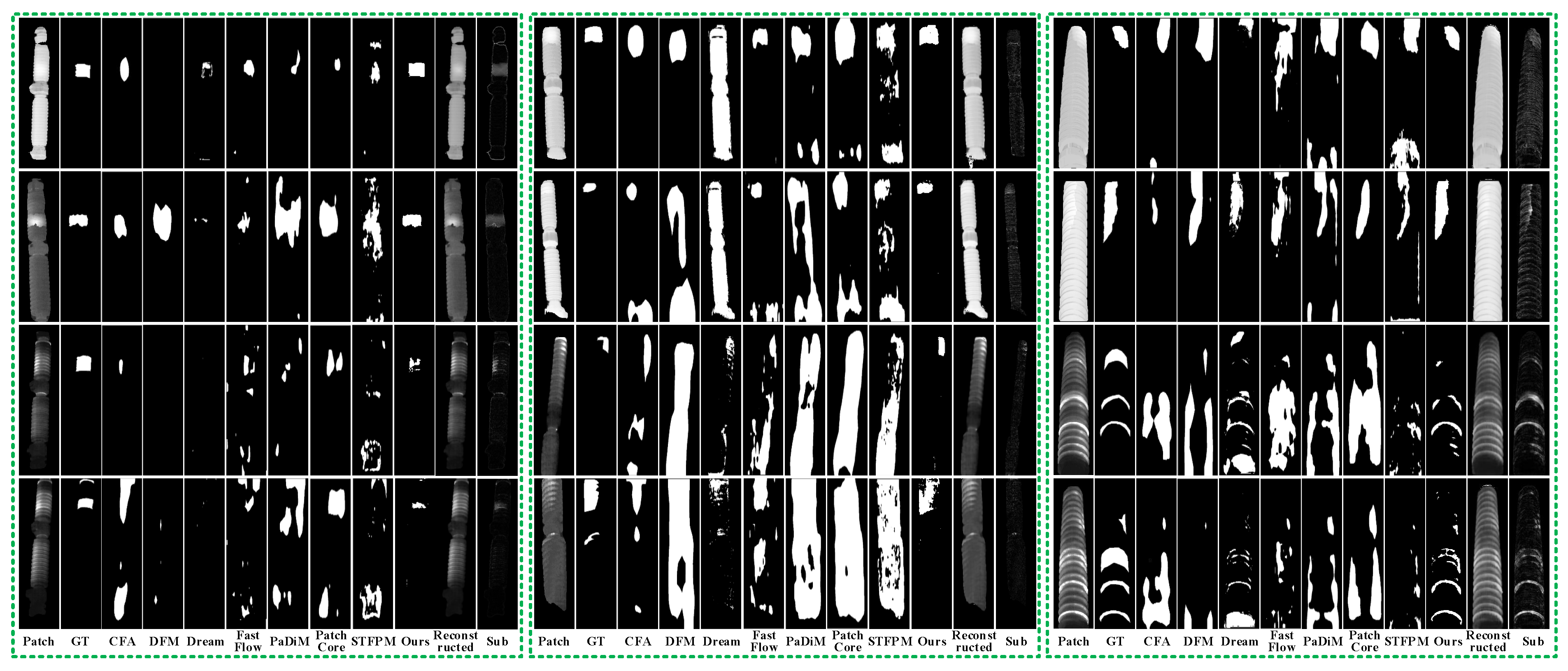
4.3.2. Qualitative Evaluation
4.3.3. Quantitative Evaluation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Miao, X.; Jiang, H.; Chen, J.; Wu, M.; Chen, Z. Component Detection for Power Line Inspection Using a Graph-Based Relation Guiding Network. IEEE Trans. Ind. Inform. 2023, 19, 9280–9290. [Google Scholar] [CrossRef]
- Zhao, Z.; Feng, S.; Zhai, Y.; Zhao, W.; Li, G. Infrared Thermal Image Instance Segmentation Method for Power Substation Equipment Based on Visual Feature Reasoning. IEEE Trans. Instrum. Meas. 2023, 72, 5029613. [Google Scholar] [CrossRef]
- Hao, Z.; Pengfei, L.; Guoqing, M.; Zilong, C.; Yubing, D.; Xiaoli, H. Case analysis on the abnormal heating defect of a 220 kV XLPE cable intermediate joint. IOP Conf. Ser. Earth Environ. Sci. 2020, 610, 012008. [Google Scholar] [CrossRef]
- Xu, C.; Li, Q.; Jiang, X.; Yu, D.; Zhou, Y. Dual-Space Graph-Based Interaction Network for RGB-Thermal Semantic Segmentation in Electric Power Scene. IEEE Trans. Circuits Syst. Video Technol. 2023, 33, 1577–1592. [Google Scholar] [CrossRef]
- Zhong, Z.; Chen, Y.; Hou, S.; Wang, B.; Liu, Y.; Geng, J.; Fan, S.; Wang, D.; Zhang, X. Super-resolution reconstruction method of infrared images of composite insulators with abnormal heating based on improved SRGAN. IET Gener. Transm. Distrib. 2022, 16, 2063–2073. [Google Scholar] [CrossRef]
- Yue, Y.k.; Wu, T.b. Analysis of abnormal heating of 66kV dry-type air-core reactor grounding device. J. Phys. Conf. Ser. 2022, 2237, 012014. [Google Scholar]
- Lin, Y.; Li, Z.; Sun, Y.; Yang, Y.; Zheng, W. Voltage-Induced Heating Defect Detection for Electrical Equipment in Thermal Images. Energies 2023, 16, 8036. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object detection via region-based fully convolutional networks. In Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Liu, Y.; Ji, X.; Pei, S.; Ma, Z.; Zhang, G.; Lin, Y.; Chen, Y. Research on automatic location and recognition of insulators in substation based on YOLOv3. High Volt. 2020, 5, 62–68. [Google Scholar] [CrossRef]
- Li, B.; Wang, T.; Zhai, Y.; Yuan, J. RFIENet: RGB-thermal feature interactive enhancement network for semantic segmentation of insulator in backlight scenes. Measurement 2022, 205, 112177. [Google Scholar] [CrossRef]
- Rahmani, A.; Haddadnia, J.; Seryasat, O. Intelligent fault detection of electrical equipment in ground substations using thermo vision technique. In Proceedings of the 2010 2nd International Conference on Mechanical and Electronics Engineering, Kyoto, Japan, 1–3 August 2010; Volume 2, pp. V2-150–V2-154. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, J.; Xu, S.; Lin, Z.; Pfister, H. Discrete Cosine Transform Network for Guided Depth Map Super-Resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 5697–5707. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Ahuja, N.A.; Ndiour, I.; Kalyanpur, T.; Tickoo, O. Probabilistic Modeling of Deep Features for Out-of-Distribution and Adversarial Detection. arXiv 2019, arXiv:1909.11786. [Google Scholar]
- Hariharan, B.; Arbeláez, P.; Girshick, R.; Malik, J. Simultaneous detection and segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 297–312. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Sarkar, A.; Maniruzzaman, M.; Alahe, M.A.; Ahmad, M. An Effective and Novel Approach for Brain Tumor Classification Using AlexNet CNN Feature Extractor and Multiple Eminent Machine Learning Classifiers in MRIs. J. Sens. 2023, 2023, 1224619. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Zagoruyko, S.; Lerer, A.; Lin, T.Y.; Pinheiro, P.H.; Gross, S.; Chintala, S.; Dollar, P. A MultiPath Network for Object Detection. In Proceedings of the British Machine Vision Conference, York, UK, 19–22 September 2016. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 386–397. [Google Scholar] [CrossRef] [PubMed]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. Yolact: Real-time instance segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9157–9166. [Google Scholar]
- Wang, X.; Kong, T.; Shen, C.; Jiang, Y.; Li, L. Solo: Segmenting objects by locations. In Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, 23–28 August 2020; pp. 649–665. [Google Scholar]
- Cheng, B.; Schwing, A.; Kirillov, A. Per-pixel classification is not all you need for semantic segmentation. Adv. Neural Inf. Process. Syst. 2021, 34, 17864–17875. [Google Scholar]
- Cheng, B.; Misra, I.; Schwing, A.G.; Kirillov, A.; Girdhar, R. Masked-attention mask transformer for universal image segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1290–1299. [Google Scholar]
- Duan, K.; Xie, L.; Qi, H.; Bai, S.; Huang, Q.; Tian, Q. Location-sensitive visual recognition with cross-iou loss. arXiv 2021, arXiv:2104.04899. [Google Scholar]
- Peng, S.; Jiang, W.; Pi, H.; Li, X.; Bao, H.; Zhou, X. Deep snake for real-time instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 8533–8542. [Google Scholar]
- Liu, Z.; Liew, J.H.; Chen, X.; Feng, J. Dance: A deep attentive contour model for efficient instance segmentation. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Virtual, 5–9 January 2021; pp. 345–354. [Google Scholar]
- Zhang, T.; Wei, S.; Ji, S. E2ec: An end-to-end contour-based method for high-quality high-speed instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 4443–4452. [Google Scholar]
- Chen, Y.T.; Shi, J.; Ye, Z.; Mertz, C.; Ramanan, D.; Kong, S. Multimodal Object Detection via Probabilistic Ensembling. In Proceedings of the European Conference on Computer Vision (ECCV), Tel Aviv, Israel, 23–27 October 2022; pp. 139–158. [Google Scholar]
- Cao, Y.; Bin, J.; Hamari, J.; Blasch, E.; Liu, Z. Multimodal Object Detection by Channel Switching and Spatial Attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Vancouver, BC, Canada, 17–24 June 2023; pp. 403–411. [Google Scholar]
- El Ahmar, W.; Massoud, Y.; Kolhatkar, D.; AlGhamdi, H.; Alja’afreh, M.; Hammoud, R.; Laganiere, R. Enhanced Thermal-RGB Fusion for Robust Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Vancouver, BC, Canada, 17–24 June 2023; pp. 365–374. [Google Scholar]
- Zhang, Q.; Chang, X.; Meng, Z.; Li, Y. Equipment detection and recognition in electric power room based on faster R-CNN. Procedia Comput. Sci. 2021, 183, 324–330. [Google Scholar] [CrossRef]
- Zheng, H.; Sun, Y.; Liu, X.; Djike, C.L.T.; Li, J.; Liu, Y.; Ma, J.; Xu, K.; Zhang, C. Infrared image detection of substation insulators using an improved fusion single shot multibox detector. IEEE Trans. Power Deliv. 2020, 36, 3351–3359. [Google Scholar] [CrossRef]
- Xu, P.; Zhang, J.; Yin, T.; Qian, X.; Yang, Y. Research on image segmentation of power equipment based on improved PCNN algorithm. Intell. Comput. Appl. 2019, 9, 59–62. [Google Scholar]
- Li, H.G.; Lu, C.Y.; Qi, L. Road Target Detection Based on Otsu Multi-Threshold Segmentation. In Proceedings of the Mechanical Engineering and Control Systems: Proceedings of 2015 International Conference on Mechanical Engineering and Control Systems (MECS2015), Wuhan, China, 23–25 January 2015; pp. 265–269. [Google Scholar]
- DUNN, J. A fuzzy relative of the ISODATA process and its use in detecting compact well-separated clusters. J. Cybern. 1974, 3, 32–57. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Lou, J.; Li, M. Infrared image segmentation for power equipment failure based on fuzzy clustering and wavelet decomposition. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; pp. 1274–1277. [Google Scholar]
- Balakrishnan, G.K.; Yaw, C.T.; Koh, S.P.; Abedin, T.; Raj, A.A.; Tiong, S.K.; Chen, C.P. A Review of Infrared Thermography for Condition-Based Monitoring in Electrical Energy: Applications and Recommendations. Energies 2022, 15, 6000. [Google Scholar] [CrossRef]
- Li, Y.; Li, Q.; Liu, Z.; Chen, Q. Diagnosis and Analysis of Abnormal Heating Fault for 35kV Dry Air Core Reactor. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 431–434. [Google Scholar]
- Liao, W.; Yang, D.; Wang, Y.; Ren, X. Fault diagnosis of power transformers using graph convolutional network. CSEE J. Power Energy Syst. 2020, 7, 241–249. [Google Scholar]
- Siddiqui, Z.A.; Park, U.; Lee, S.W.; Jung, N.J.; Choi, M.; Lim, C.; Seo, J.H. Robust powerline equipment inspection system based on a convolutional neural network. Sensors 2018, 18, 3837. [Google Scholar] [CrossRef] [PubMed]
- Resendiz-Ochoa, E.; Osornio-Rios, R.A.; Benitez-Rangel, J.P.; Morales-Hernandez, L.A.; Romero-Troncoso, R.d.J. Segmentation in thermography images for bearing defect analysis in induction motors. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 572–577. [Google Scholar] [CrossRef]
- Zheng, H.; Cui, Y.; Yang, W.; Li, J.; Ji, L.; Ping, Y.; Hu, S.; Chen, X. An Infrared Image Detection Method of Substation Equipment Combining Iresgroup Structure and CenterNet. IEEE Trans. Power Deliv. 2022, 37, 4757–4765. [Google Scholar] [CrossRef]
- Zou, H.; Huang, F. A novel intelligent fault diagnosis method for electrical equipment using infrared thermography. Infrared Phys. Technol. 2015, 73, 29–35. [Google Scholar] [CrossRef]
- Wang, B.; Dong, M.; Ren, M.; Wu, Z.; Guo, C.; Zhuang, T.; Pischler, O.; Xie, J. Automatic Fault Diagnosis of Infrared Insulator Images Based on Image Instance Segmentation and Temperature Analysis. IEEE Trans. Instrum. Meas. 2020, 69, 5345–5355. [Google Scholar] [CrossRef]
- Zavrtanik, V.; Kristan, M.; Skočaj, D. DRAEM—A Discriminatively Trained Reconstruction Embedding for Surface Anomaly Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 8330–8339. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Gao, S.H.; Cheng, M.M.; Zhao, K.; Zhang, X.Y.; Yang, M.H.; Torr, P. Res2Net: A New Multi-Scale Backbone Architecture. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 652–662. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Zhang, P.; Zhu, Y.; Lei, S. Simulation of Flood Wave Surface by Fast Fourier Transform Based on Perlin Noise. In Proceedings of the 2022 IEEE 13th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 21–23 October 2022; pp. 1–8. [Google Scholar]
- Wang, Z.; Bovik, A.; Sheikh, H.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open MMLab Detection Toolbox and Benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
- Chen, K.; Pang, J.; Wang, J.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Shi, J.; Ouyang, W.; et al. Hybrid Task Cascade for Instance Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Wang, X.; Zhang, R.; Kong, T.; Li, L.; Shen, C. SOLOv2: Dynamic and Fast Instance Segmentation. In Proceedings of the Advances in Neural Information Processing Systems; Larochelle, H., Ranzato, M., Hadsell, R., Balcan, M., Lin, H., Eds.; Curran Associates, Inc.: New York, NY, USA, 2020; Volume 33, pp. 17721–17732. [Google Scholar]
- Tian, Z.; Shen, C.; Wang, X.; Chen, H. BoxInst: High-Performance Instance Segmentation With Box Annotations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 5443–5452. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H. Conditional Convolutions for Instance Segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, 23–28 August 2020; pp. 282–298. [Google Scholar]
- Cheng, T.; Wang, X.; Chen, S.; Zhang, W.; Zhang, Q.; Huang, C.; Zhang, Z.; Liu, W. Sparse Instance Activation for Real-Time Instance Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 4433–4442. [Google Scholar]
- Lyu, C.; Zhang, W.; Huang, H.; Zhou, Y.; Wang, Y.; Liu, Y.; Zhang, S.; Chen, K. RTMDet: An Empirical Study of Designing Real-Time Object Detectors. arXiv 2022, arXiv:2212.07784. [Google Scholar]
- Li, G.; Wang, Y.; Liu, Z.; Zhang, X.; Zeng, D. RGB-T Semantic Segmentation with Location, Activation, and Sharpening. IEEE Trans. Circuits Syst. Video Technol. 2023, 33, 1223–1235. [Google Scholar] [CrossRef]
- Roth, K.; Pemula, L.; Zepeda, J.; Schölkopf, B.; Brox, T.; Gehler, P. Towards Total Recall in Industrial Anomaly Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 14318–14328. [Google Scholar]
- Lee, S.; Lee, S.; Song, B.C. CFA: Coupled-Hypersphere-Based Feature Adaptation for Target-Oriented Anomaly Localization. IEEE Access 2022, 10, 78446–78454. [Google Scholar] [CrossRef]
- Kramer, O. Scikit-Learn. In Machine Learning for Evolution Strategies; Springer International Publishing: Cham, Switzerland, 2016; pp. 45–53. [Google Scholar] [CrossRef]
- Defard, T.; Setkov, A.; Loesch, A.; Audigier, R. PaDiM: A Patch Distribution Modeling Framework for Anomaly Detection and Localization. In Proceedings of the Pattern Recognition. ICPR International Workshops and Challenges, Virtual, 10–15 January 2021; pp. 475–489. [Google Scholar]
- Yu, J.; Zheng, Y.; Wang, X.; Li, W.; Wu, Y.; Zhao, R.; Wu, L. FastFlow: Unsupervised Anomaly Detection and Localization via 2D Normalizing Flows. arXiv 2021, arXiv:2111.07677. [Google Scholar]
- Yamada, S.; Hotta, K. Reconstruction Student with Attention for Student-Teacher Pyramid Matching. arXiv 2022, arXiv:2111.15376. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox |
| MaskRCNN [21] | 0.6 | 0.594 | 0.214 | 0.289 | 0.648 | 0.646 | 0.74 | 0.605 | 0.841 | 0.88 | 0.69 | 0.685 |
| YOLACT [22] | 0.581 | 0.615 | 0.189 | 0.341 | 0.627 | 0.655 | 0.749 | 0.585 | 0.839 | 0.898 | 0.648 | 0.72 |
| HTC [54] | 0.614 | 0.691 | 0.27 | 0.394 | 0.664 | 0.74 | 0.736 | 0.725 | 0.878 | 0.901 | 0.676 | 0.799 |
| SOLOv2 [55] | 0.593 | - | 0.163 | - | 0.645 | - | 0.771 | - | 0.834 | - | 0.663 | - |
| BoxInst [56] | 0.551 | 0.708 | 0.264 | 0.537 | 0.567 | 0.743 | 0.624 | 0.66 | 0.779 | 0.936 | 0.663 | 0.837 |
| CondInst [57] | 0.613 | 0.62 | 0.293 | 0.415 | 0.669 | 0.68 | 0.766 | 0.616 | 0.865 | 0.887 | 0.688 | 0.713 |
| Mask2Former [25] | 0.622 | 0.601 | 0.194 | 0.229 | 0.664 | 0.652 | 0.767 | 0.668 | 0.842 | 0.782 | 0.678 | 0.661 |
| SparseInst [58] | 0.639 | - | 0.243 | - | 0.706 | - | 0.814 | - | 0.861 | - | 0.71 | - |
| RTMDet [59] | 0.632 | 0.713 | 0.274 | 0.437 | 0.684 | 0.78 | 0.766 | 0.702 | 0.897 | 0.909 | 0.690 | 0.810 |
| Ours | 0.653 | 0.775 | 0.331 | 0.501 | 0.695 | 0.833 | 0.767 | 0.802 | 0.869 | 0.941 | 0.721 | 0.858 |
| Metric | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox |
| MaskRCNN [21] | 0.781 | 0.709 | 0.503 | 0.504 | 0.789 | 0.709 | 0.832 | 0.747 | 0.981 | 0.98 | 0.917 | 0.879 |
| YOLACT [22] | 0.727 | 0.645 | 0.356 | 0.43 | 0.717 | 0.635 | 0.808 | 0.696 | 0.935 | 0.942 | 0.865 | 0.765 |
| HTC [54] | 0.769 | 0.768 | 0.445 | 0.593 | 0.792 | 0.783 | 0.827 | 0.785 | 0.959 | 0.964 | 0.886 | 0.898 |
| SOLOv2 [55] | 0.76 | - | 0.238 | - | 0.761 | - | 0.862 | - | 0.951 | - | 0.87 | - |
| BoxInst [56] | 0.746 | 0.804 | 0.458 | 0.554 | 0.748 | 0.815 | 0.806 | 0.84 | 0.976 | 0.986 | 0.883 | 0.933 |
| CondInst [57] | 0.824 | 0.749 | 0.584 | 0.588 | 0.828 | 0.732 | 0.889 | 0.802 | 0.984 | 0.986 | 0.934 | 0.918 |
| Mask2Former [25] | 0.819 | 0.769 | 0.34 | 0.347 | 0.791 | 0.751 | 0.924 | 0.871 | 0.957 | 0.923 | 0.886 | 0.849 |
| SparseInst [58] | 0.808 | - | 0.598 | - | 0.809 | - | 0.865 | - | 0.941 | - | 0.883 | - |
| RTMDet [59] | 0.814 | 0.828 | 0.540 | 0.540 | 0.813 | 0.813 | 0.881 | 0.881 | 0.986 | 0.992 | 0.934 | 0.934 |
| Ours | 0.83 | 0.836 | 0.555 | 0.653 | 0.824 | 0.838 | 0.897 | 0.879 | 0.991 | 0.991 | 0.926 | 0.941 |
| Metric | |||||||
|---|---|---|---|---|---|---|---|
| Situation | Method | Mask | Bbox | Mask | Bbox | Mask | Bbox |
| Normal | CondInst | 0.613 | 0.620 | 0.865 | 0.887 | 0.688 | 0.713 |
| Mask2Former | 0.622 | 0.601 | 0.842 | 0.782 | 0.678 | 0.661 | |
| SparseInst | 0.639 | - | 0.861 | - | 0.710 | - | |
| RTMDet | 0.632 | 0.713 | 0.897 | 0.909 | 0.690 | 0.810 | |
| Ours | 0.653 | 0.775 | 0.869 | 0.941 | 0.721 | 0.858 | |
| Fog | CondInst | 0.319 | 0.351 | 0.536 | 0.521 | 0.296 | 0.407 |
| Mask2Former | 0.352 | 0.415 | 0.578 | 0.588 | 0.348 | 0.441 | |
| SparseInst | 0.235 | - | 0.377 | - | 0.235 | - | |
| RTMDet | 0.306 | 0.300 | 0.478 | 0.458 | 0.305 | 0.333 | |
| Ours | 0.445 | 0.489 | 0.597 | 0.654 | 0.480 | 0.556 | |
| Night | CondInst | 0.548 | 0.600 | 0.776 | 0.838 | 0.597 | 0.654 |
| Mask2Former | 0.410 | 0.381 | 0.586 | 0.480 | 0.438 | 0.414 | |
| SparseInst | 0.367 | - | 0.586 | - | 0.392 | - | |
| RTMDet | 0.549 | 0.600 | 0.818 | 0.854 | 0.633 | 0.704 | |
| Ours | 0.576 | 0.661 | 0.788 | 0.878 | 0.654 | 0.761 | |
| Metric | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Category | Ablation | Mask | Bbox | Mask | Bbox | Mask | Bbox | Mask | Bbox |
| Feature Fusion | Thermal only | 0.641 | 0.738 | 0.256 | 0.387 | 0.677 | 0.788 | 0.730 | 0.747 |
| Concatenation | 0.597 | 0.730 | 0.228 | 0.391 | 0.632 | 0.789 | 0.675 | 0.734 | |
| Addition | 0.635 | 0.748 | 0.290 | 0.470 | 0.670 | 0.799 | 0.668 | 0.721 | |
| CAM [60] | 0.599 | 0.693 | 0.214 | 0.353 | 0.644 | 0.745 | 0.678 | 0.689 | |
| Proposed | 0.653 | 0.775 | 0.331 | 0.501 | 0.695 | 0.833 | 0.767 | 0.802 | |
| Contour Deformation | E2EC [29] | 0.616 | 0.711 | 0.253 | 0.406 | 0.654 | 0.771 | 0.619 | 0.608 |
| Proposed | 0.653 | 0.775 | 0.331 | 0.501 | 0.695 | 0.833 | 0.767 | 0.802 | |
| Method | Params (M) | FLOPs (G) | Runtime (s) |
|---|---|---|---|
| MaskRCNN [21] | 44.01 | 216.4 | 0.024 |
| SOLOv2 [55] | 46.26 | 208.9 | 0.034 |
| CondInst [57] | 34.00 | 268.5 | 0.027 |
| Mask2Former [25] | 44.01 | 203.1 | 0.071 |
| SparseInst [58] | 31.62 | 91.8 | 0.021 |
| RTMDet [59] | 10.16 | 21.5 | 0.016 |
| Ours | 62.12 | 198.5 | 0.068 |
| Metric | AUROC | AP | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Category | LA_2 | VT_2 | CT_2 | Mean | LA_2 | VT_2 | CT_2 | Mean | ||||||||
| Method | Image | Pixel | Image | Pixel | Image | Pixel | Image | Pixel | Image | Pixel | Image | Pixel | Image | Pixel | Image | Pixel |
| PatchCore [61] | 82.77 | 94.77 | 88.12 | 77.16 | 99.75 | 86.61 | 90.21 | 86.18 | 88.33 | 32.39 | 88.67 | 9.97 | 98.79 | 27.81 | 91.93 | 23.39 |
| CFA [62] | 78.51 | 93.00 | 49.90 | 89.90 | 87.19 | 91.34 | 71.86 | 91.41 | 79.41 | 19.92 | 81.66 | 25.56 | 94.25 | 32.62 | 85.10 | 26.03 |
| DFM [14] | 86.52 | 92.54 | 88.31 | 77.45 | 94.87 | 88.92 | 89.90 | 86.30 | 88.52 | 20.85 | 97.53 | 12.22 | 98.79 | 29.34 | 94.94 | 20.80 |
| PaDiM [64] | 86.94 | 91.01 | 64.74 | 79.67 | 92.43 | 88.89 | 81.37 | 86.52 | 92.30 | 11.24 | 84.48 | 10.85 | 98.78 | 24.32 | 91.85 | 15.47 |
| FastFlow [65] | 74.35 | 90.46 | 87.75 | 79.10 | 96.70 | 88.09 | 86.26 | 85.88 | 80.59 | 15.23 | 90.74 | 22.35 | 96.47 | 26.29 | 89.26 | 21.29 |
| STFPM [66] | 67.22 | 87.54 | 66.41 | 89.90 | 84.26 | 89.78 | 72.63 | 89.07 | 78.26 | 9.96 | 81.66 | 12.27 | 90.10 | 30.02 | 83.34 | 17.41 |
| DRAEM [47] | 25.78 | 84.37 | 36.73 | 82.73 | 47.31 | 77.73 | 36.60 | 81.61 | 72.97 | 23.15 | 81.66 | 10.26 | 89.13 | 20.45 | 81.25 | 17.95 |
| Ours | 95.37 | 97.73 | 94.61 | 95.32 | 99.75 | 97.05 | 96.57 | 96.70 | 98.57 | 63.68 | 98.81 | 40.01 | 99.97 | 67.21 | 99.11 | 56.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Xu, C.; Ye, Q.; Cao, L.; Dai, X.; Li, Q. Thermal Imaging-Based Abnormal Heating Detection for High-Voltage Power Equipment. Energies 2024, 17, 4035. https://doi.org/10.3390/en17164035
Liu J, Xu C, Ye Q, Cao L, Dai X, Li Q. Thermal Imaging-Based Abnormal Heating Detection for High-Voltage Power Equipment. Energies. 2024; 17(16):4035. https://doi.org/10.3390/en17164035
Chicago/Turabian StyleLiu, Jiange, Chang Xu, Qian Ye, Li Cao, Xin Dai, and Qingwu Li. 2024. "Thermal Imaging-Based Abnormal Heating Detection for High-Voltage Power Equipment" Energies 17, no. 16: 4035. https://doi.org/10.3390/en17164035
APA StyleLiu, J., Xu, C., Ye, Q., Cao, L., Dai, X., & Li, Q. (2024). Thermal Imaging-Based Abnormal Heating Detection for High-Voltage Power Equipment. Energies, 17(16), 4035. https://doi.org/10.3390/en17164035