
Pitch Actuator Fault-Tolerant Control of Wind Turbines via an
 , , ,
, , ,  and
and
Abstract
1. Introduction
- To address the critical issue of pitch actuator faults in wind turbines and their detrimental impact on performance and reliability;
- To introduce and elucidate the adaptive- scheme as a novel and effective control strategy tailored for pitch actuator fault tolerance;
- To evaluate and validate the proposed approach, the simulation results are analyzed for healthy and faulty conditions of the system.
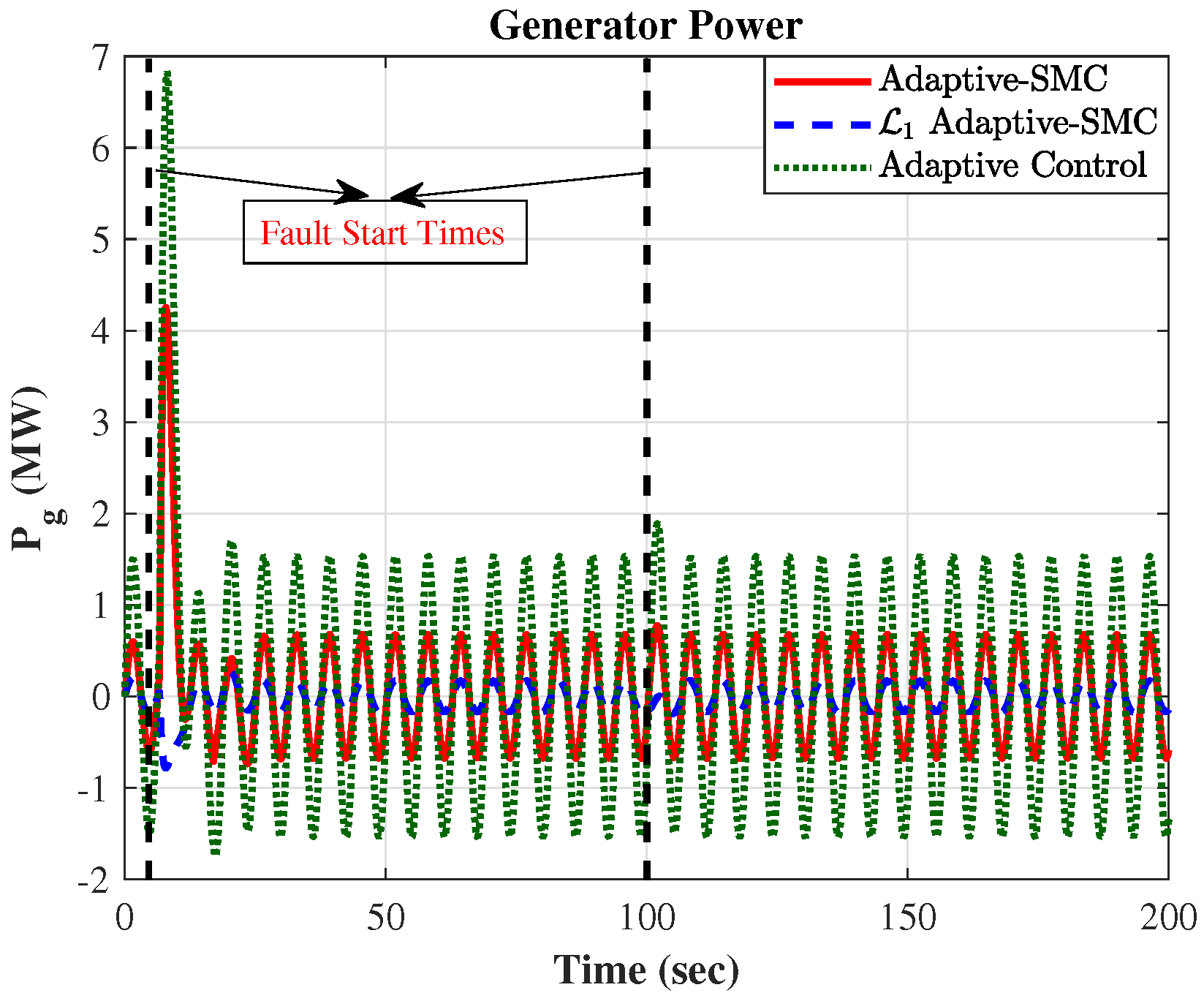
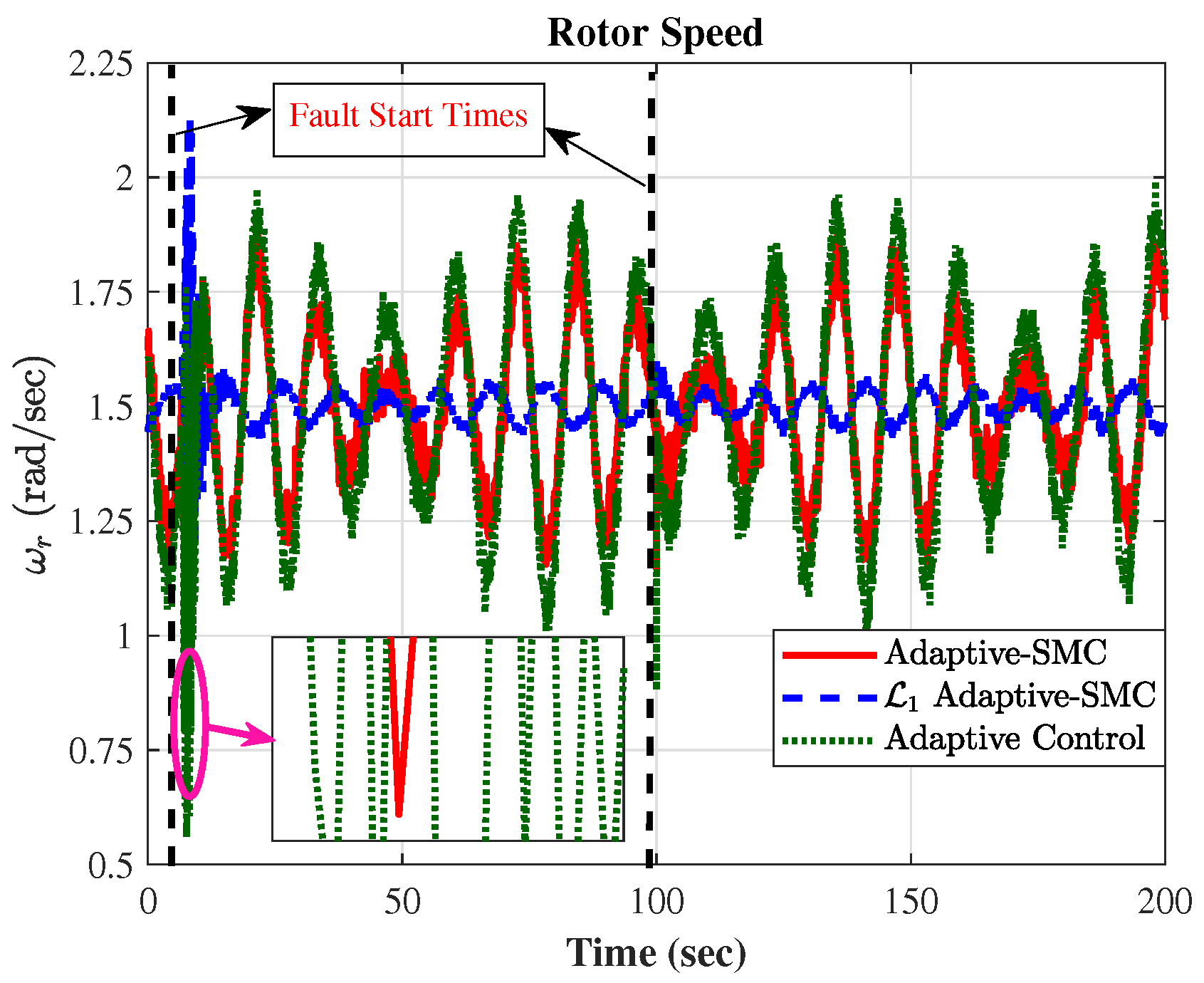
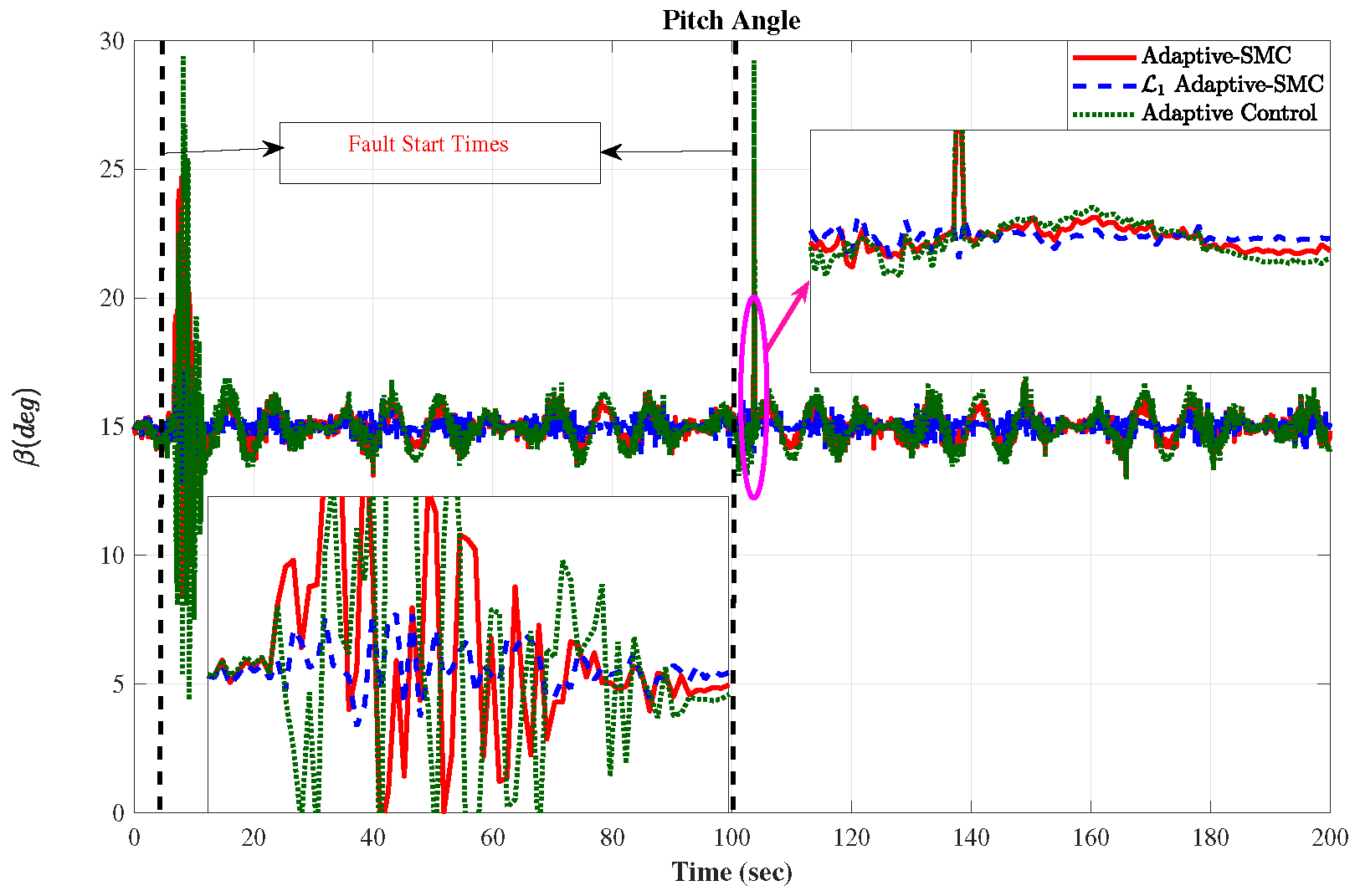
- To compare the performance of the proposed method with traditional control techniques, including adaptive- and adaptive control, to demonstrate its superiority.
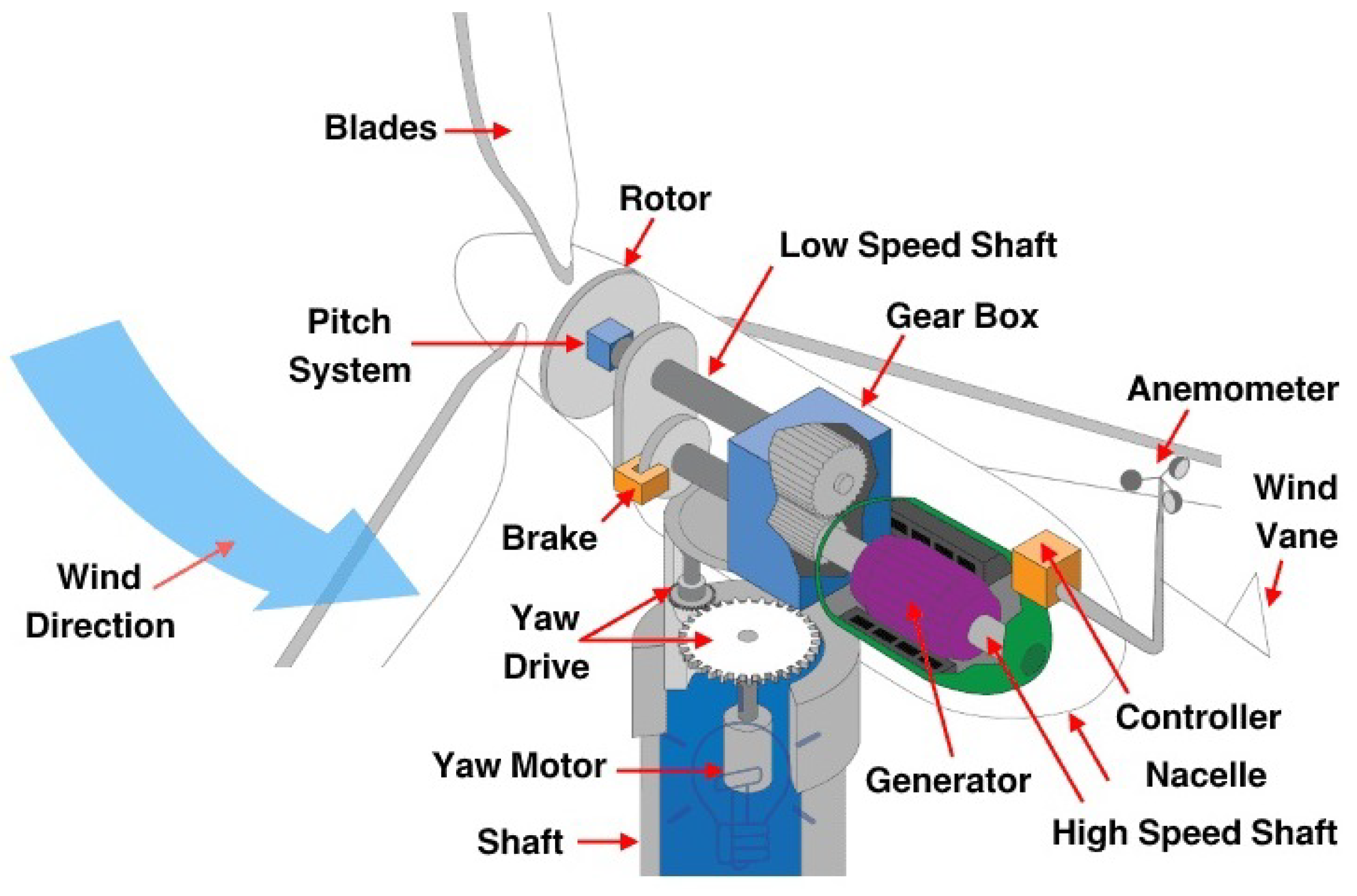
2. Wind Turbine System
2.1. Aerodynamic Model
- P: power extracted from the wind;
- : air density;
- A: swept area of the turbine blades;
- : power coefficient of the turbine;
- V: wind speed.
- is the tip–speed ratio for each individual segment of the blade.
- : is the tip–speed ratio.
- : is the blade pitch angle.
- , , are coefficients determined based on the specific model and design of the wind turbine and its blades.
- : is the aerodynamic power extracted from the wind, which can be calculated using the aforementioned power coefficient and other aerodynamic parameters.
- : is the angular velocity of the rotor in radians per second.
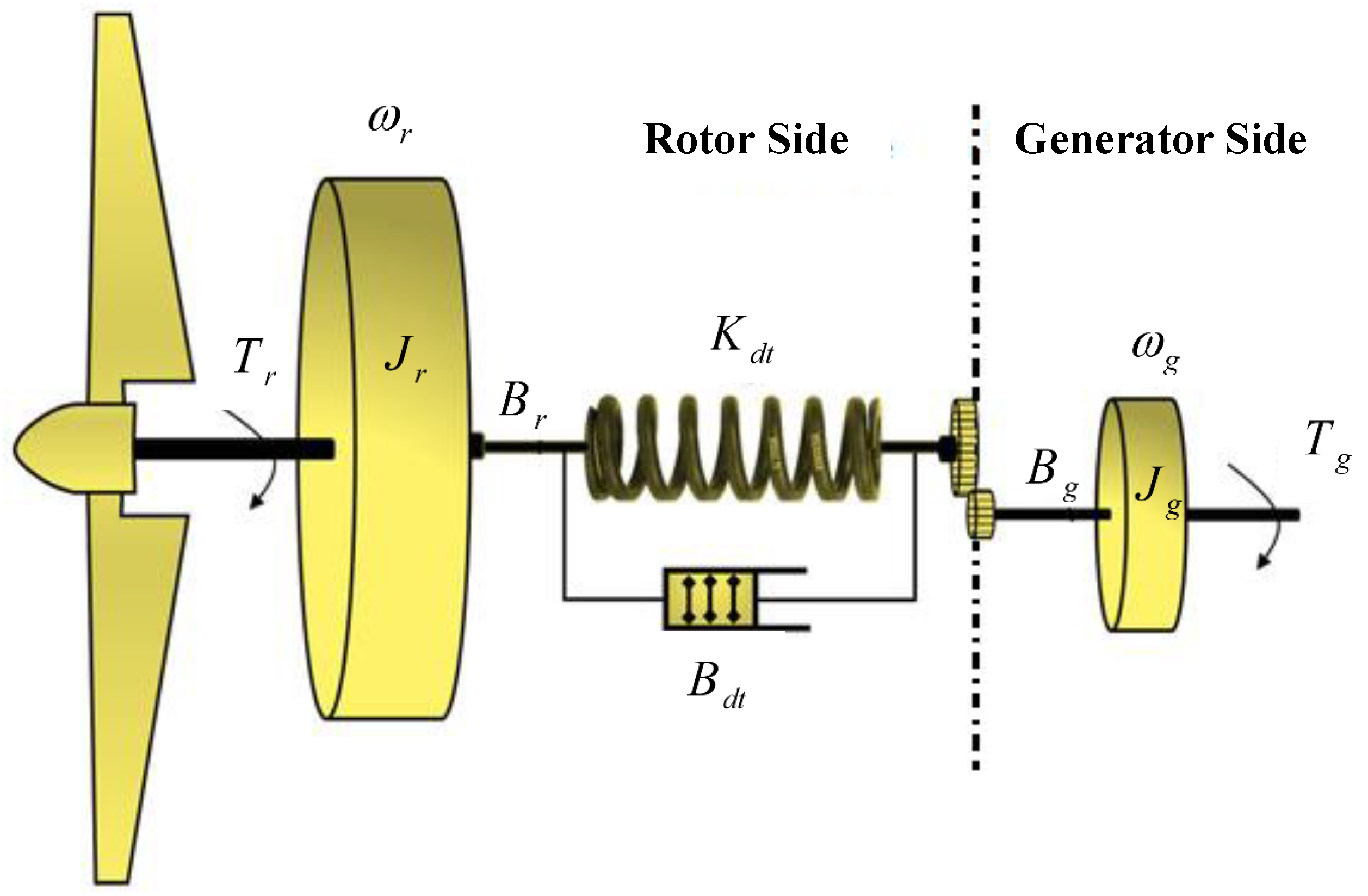
2.2. Drive-Train Model
2.2.1. Rotor Dynamics
2.2.2. Generator Dynamics
2.2.3. Drive-Train Dynamics (Spring-Damper System)
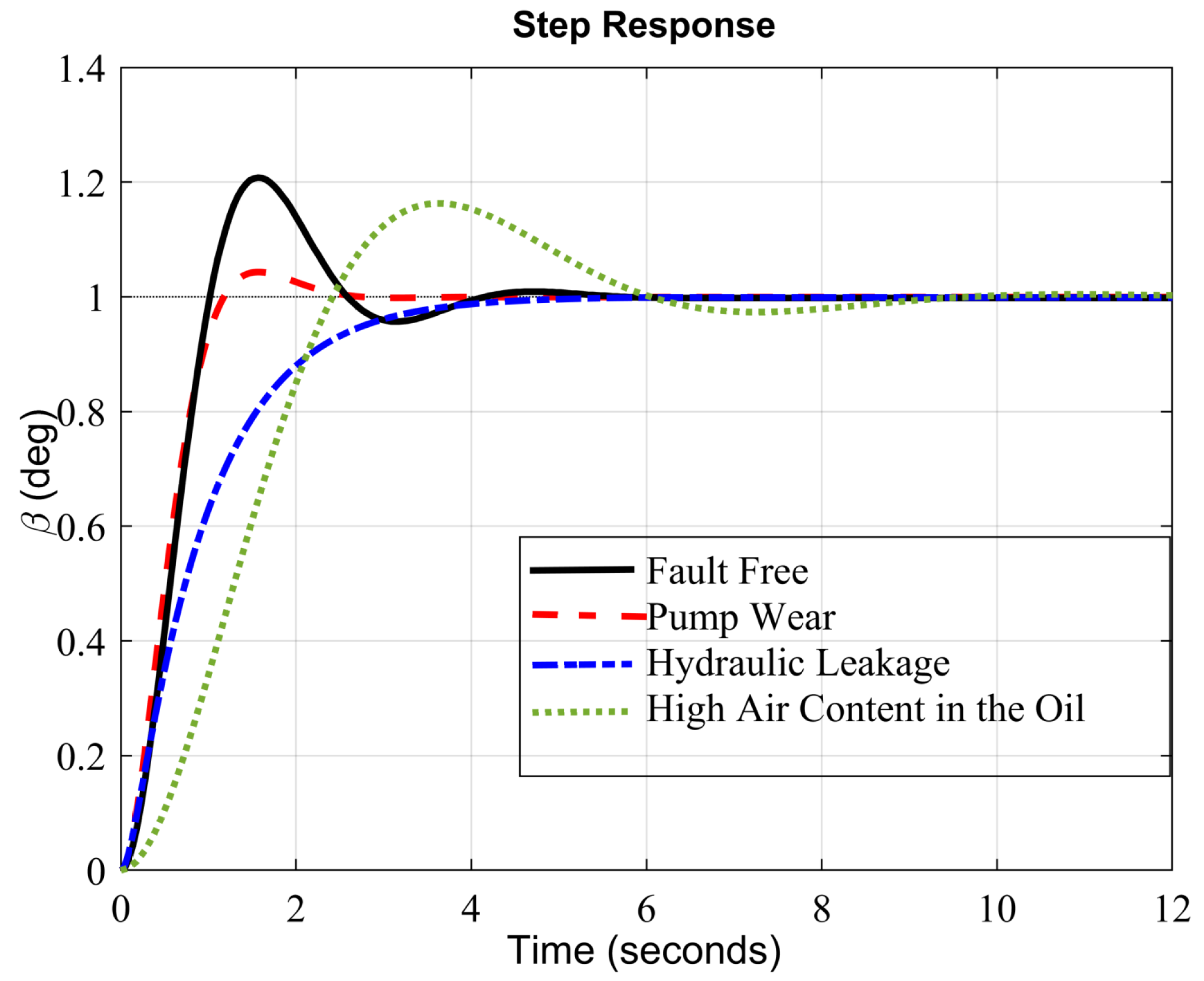
2.3. Pitch Actuator Model
- First-order system: This block models the pitch actuator’s dynamics. The transfer function for the first-order system is:where is the time constant, ans s is the Laplace variable.
- Saturation: This block ensures that the actuator’s output does not exceed (or fall below) specified limits. While saturation can be represented mathematically in various ways, in block diagram form, it is typically a nonlinear element.
- Rate Limiter: This block restricts the rate of change of the actuator’s output.
3. Faults Model of Pitch Actuator
3.1. Pump Wear
3.2. Hydraulic Leakage
3.3. High Air Content in Oil
4. Proposed Control Scheme
4.1. Standard Problem
4.1.1. State Predictor
4.1.2. Adaptation Laws
4.1.3. Control Law
4.2. Adaptive- with State Predictor
- Adjustable gain: In the adaptive- scheme, the adjustable gain refers to the mechanism by which the controller dynamically adjusts the control gains in response to varying system conditions and disturbances. This adaptability allows the controller to maintain optimal performance even as the system parameters or external conditions change. The adjustable gain ensures that the control input is sufficient to counteract disturbances and maintain desired performance without causing excessive control effort or chattering.
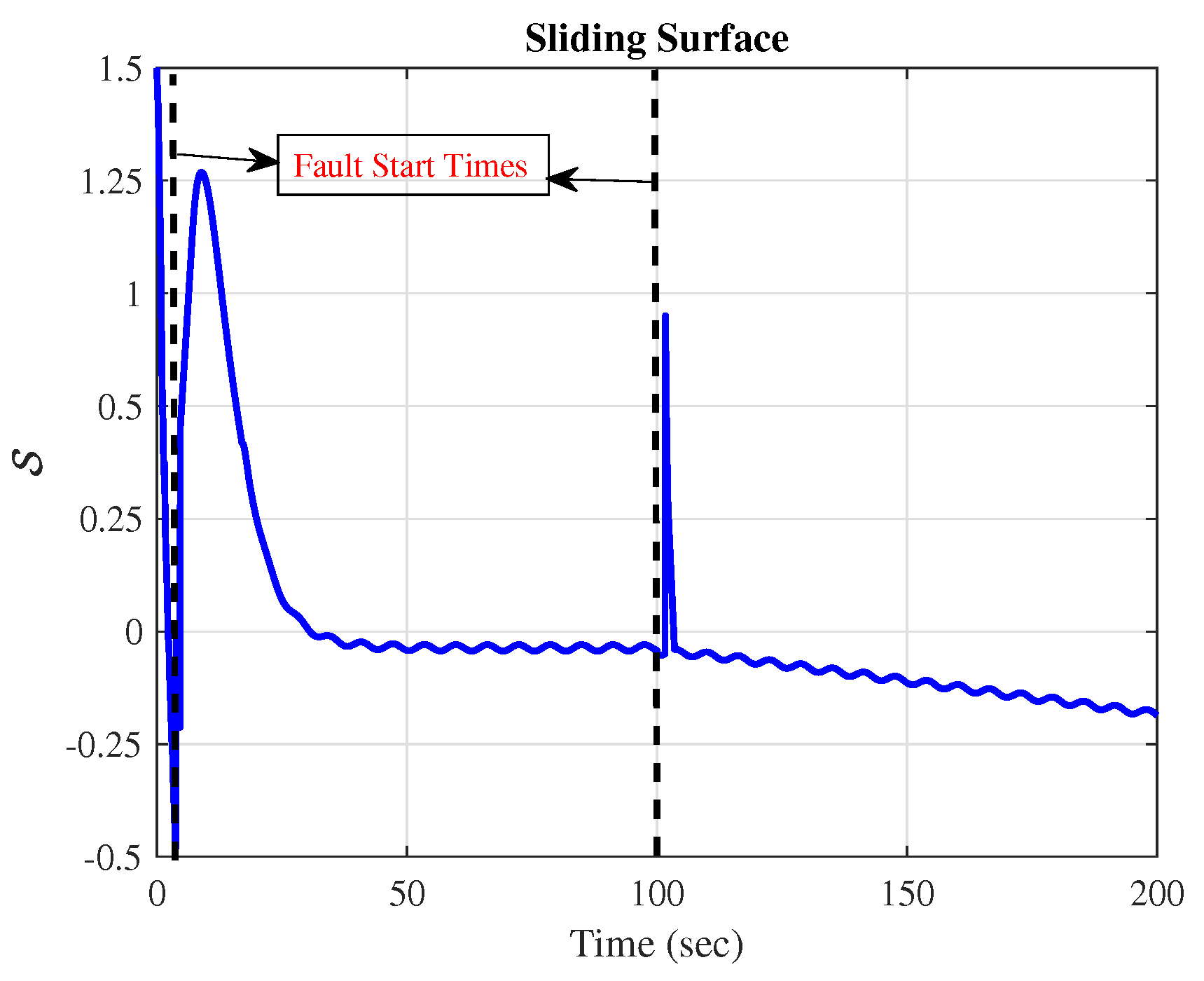
- Integrated sliding surface: The integrated sliding surface is a key component of the technique. In this context, the sliding surface is a predefined manifold in the system’s state space. The control objective is to drive the system’s state trajectory onto this surface and hold it there, ensuring robust performance despite uncertainties and disturbances. The integrated sliding surface combines the traditional sliding mode control approach with additional terms from the adaptive control, which helps to reduce chattering and improve the system’s response to faults and disturbances.
4.3. State Predictor of Nonlinear Disturbance
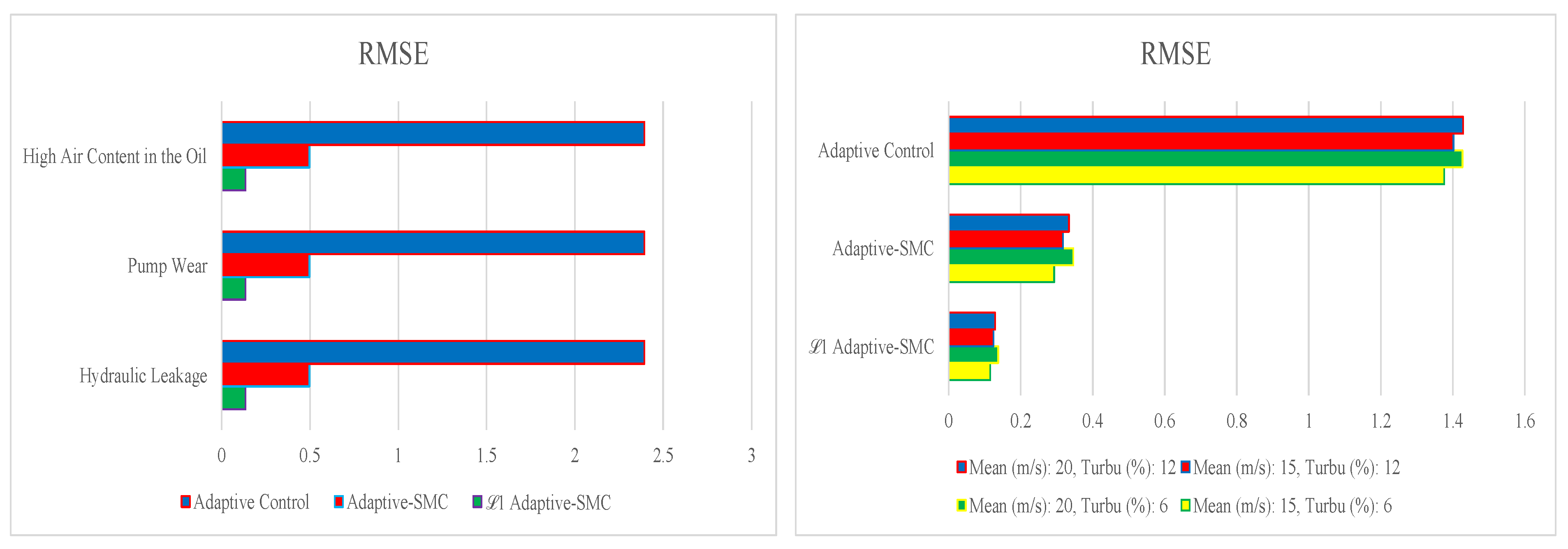
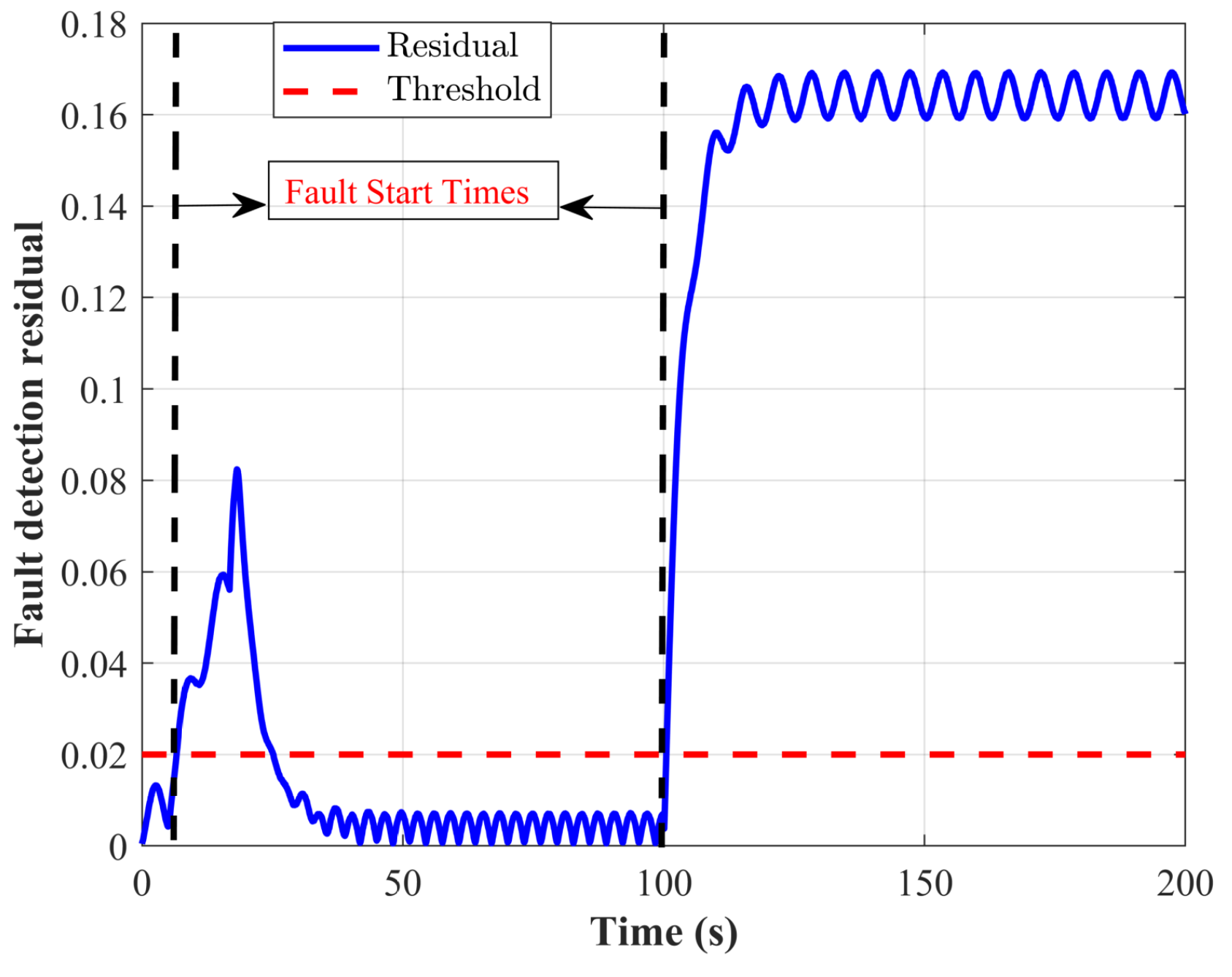
5. Simulation-Based Evaluation and Discussion of the Results
6. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Sliding Mode Control | |
| Active Fault-Tolerant Control | |
| adaptive- | Adaptive Sliding Mode Control |
| Root Mean Square | |
| DFIG | Doubly Fed Induction Generator |
| ITSMC | Integral Terminal Sliding Mode Control |
| NFITS | Nonsingular Fast Integral-Type Terminal Sliding |
References
- Olabi, A.G.; Obaideen, K.; Abdelkareem, M.A.; AlMallahi, M.N.; Shehata, N.; Alami, A.H.; Mdallal, A.; Hassan, A.A.M.; Sayed, E.T. Wind Energy Contribution to the Sustainable Development Goals: Case Study on London Array. Sustainability 2023, 15, 4641. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Datta, R.; Kumar, M.P.; Davim, J.P.; Pramanik, S. Energy Conversion Strategies for Wind Energy System: Electrical, Mechanical and Material Aspects. Materials 2022, 15, 1232. [Google Scholar] [CrossRef]
- Rezazadeh, A.; Bagheri, H.R.; Sarabadani, A.A. The Best Planning For a Grid-Connected Microgrid Takes Into Account Load and Renewable Generation Uncertainty As Well As Battery Storage. Trans. Mach. Intell. 2018, 1, 19–30. [Google Scholar] [CrossRef]
- Kheirabadi, M.N.; Khaligh, V.; Ghezelbash, A. The Role of Renewable Energies on Energy Security in Iran (In three fields of resources, production and distribution of energy). Trans. Mach. Intell. 2019, 1, 10–23. [Google Scholar]
- Acho, L.; Pujol-Vázquez, G. Data Fusion Based on an Iterative Learning Algorithm for Fault Detection in Wind Turbine Pitch Control Systems. Sensors 2021, 21, 8437. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Tan, W.; Hou, G. PIDD2 Control of Large Wind Turbines’ Pitch Angle. Energies 2023, 16, 5096. [Google Scholar] [CrossRef]
- Chavero-Navarrete, E.; Trejo-Perea, M.; Jáuregui-Correa, J.C.; Carrillo-Serrano, R.V.; Ronquillo-Lomeli, G.; Ríos-Moreno, J.G. Pitch Angle Optimization for Small Wind Turbines Based on a Hierarchical Fuzzy-PID Controller and Anticipated Wind Speed Measurement. Appl. Sci. 2021, 11, 1683. [Google Scholar] [CrossRef]
- Asgharnia, A.; Jamali, A.; Shahnazi, R.; Maheri, A. Load mitigation of a class of 5-MW wind turbine with RBF neural network based fractional-order PID controller. ISA Trans. 2020, 96, 272–286. [Google Scholar] [CrossRef]
- Pujol-Vazquez, G.; Acho, L.; Gibergans-Báguena, J. Fault Detection Algorithm for Wind Turbines’ Pitch Actuator Systems. Energies 2020, 13, 2861. [Google Scholar] [CrossRef]
- Gong, X.; Qiao, W. Current-Based Mechanical Fault Detection for Direct-Drive Wind Turbines via Synchronous Sampling and Impulse Detection. IEEE Trans. Ind. Electron. 2015, 62, 1693–1702. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Wind Turbine Fault Diagnosis and Fault-Tolerant Torque Load Control Against Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Liu, Z.; Xiao, C.; Zhang, T.; Zhang, X. Research on Fault Detection for Three Types of Wind Turbine Subsystems Using Machine Learning. Energies 2020, 13, 460. [Google Scholar] [CrossRef]
- Ghane, M.; Nejad, A.R.; Blanke, M.; Gao, Z.; Moan, T. Statistical fault diagnosis of wind turbine drivetrain applied to a 5 MW floating wind turbine. J. Phys. Conf. Ser. 2016, 753, 052017. [Google Scholar] [CrossRef]
- Ghane, M.; Nejad, A.R.; Blanke, M.; Gao, Z.; Moan, T. Condition monitoring of spar-type floating wind turbine drivetrain using statistical fault diagnosis. Wind Energy 2018, 21, 575–589. [Google Scholar] [CrossRef]
- Ghane, M.; Nejad, A.R.; Blanke, M.; Gao, Z.; Moan, T. Diagnostic monitoring of drivetrain in a 5 MW spar-type floating wind turbine using Hilbert spectral analysis. Energy Procedia 2017, 173, 204–213. [Google Scholar] [CrossRef]
- Habibi, H.; Howard, I.; Simani, S. Wind Turbine Pitch Actuator Regulation for Efficient and Reliable Energy Conversion: A Fault-Tolerant Constrained Control Solution. Actuators 2022, 11, 102. [Google Scholar] [CrossRef]
- Ding, S. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools, 2nd ed.; Springer: Berlin, Germany, 2008. [Google Scholar] [CrossRef]
- Ding, S. Advanced Methods for Fault Diagnosis and Fault-Tolerant Control, 1st ed.; Springer: Berlin, Germany, 2020. [Google Scholar]
- Vidal, Y.; Tutiven, C.R.J.; Acho, L. Fault diagnosis and fault-tolerant control of wind turbines via a discrete time controller with a disturbance compensator. Energies 2015, 8, 4300–4316. [Google Scholar] [CrossRef]
- Dong, J.; Verhaegen, M. Data driven fault detection and isolation of a wind turbine benchmark. In Proceedings of the IFAC World Congress, Milan, Italy, 28 August–2 September 2011; Volume 2, pp. 7086–7091. [Google Scholar]
- Simani, S.; Castaldi, P.; Farsoni, S. Data–Driven Fault Diagnosis of a Wind Farm Benchmark Model. Energies 2017, 10, 866. [Google Scholar] [CrossRef]
- Mazare, M.; Taghizadeh, M. Uncertainty estimator-based dual layer adaptive fault-tolerant control for wind turbines. Renew. Energy 2022, 188, 545–560. [Google Scholar] [CrossRef]
- Uppal, A.A.; Azam, M.R.; Iqbal, J. Sliding Mode Control in Dynamic Systems. Electronics 2023, 12, 2970. [Google Scholar] [CrossRef]
- Steinberger, M.; Horn, M.; Fridman, L. Variable-Structure Systems and Sliding-Mode Control, 1st ed.; Springer Nature: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. Sliding Mode Approach to Enhance the Power Quality of Wind Turbines under Unbalanced Grid Conditions. IEEE/CAA J. Autom. Sin. 2019, 6, 566–574. [Google Scholar] [CrossRef]
- Ayadi, M.; Salem, F. Derbel, Sliding mode approach for blade pitch angle control wind turbine using PMSG under DTC. In Proceedings of the International Conference and Sciences and Tech. of Automatic Control and Computer Engineering, Monastir, Tunisia, 21–23 December 2015. [Google Scholar]
- Colombo, L.; Corradini, M.L.; Ippoliti, G.; Orlando, G. Pitch angle control of a wind turbine operating above the rated wind speed: A sliding mode control approach. ISA Trans. 2020, 96, 95–102. [Google Scholar] [CrossRef] [PubMed]
- Kamarzarrin, M.; Refan, M. Intelligent sliding mode adaptive controller design for wind turbine pitch control system using PSO-SVM in presence of disturbance. J. Control Autom. Electr. Syst. 2020, 31, 912–925. [Google Scholar] [CrossRef]
- Azizi, A.; Nourisola, H.; Shoja-Majidabad, S. Fault tolerant control of wind turbines with an adaptive output feedback sliding mode controller. Renew. Energy 2019, 135, 55–65. [Google Scholar] [CrossRef]
- Fekih, A.; Mobayen, S.; Chen, C.C. Adaptive robust fault-tolerant control design for wind turbines subject to pitch actuator faults. Energies 2021, 14, 1791. [Google Scholar] [CrossRef]
- Wang, X.; Shen, Y. Fault-Tolerant Control Strategy of a Wind Energy Conversion System Considering Multiple Fault Reconstruction. Appl. Sci. 2018, 8, 794. [Google Scholar] [CrossRef]
- Utkin, V. Chattering problem in sliding mode control system. In Proceedings of the 2nd IFAC Conference on Analysis and Design of Hybrid Systems, Alghero, Italy, 7–9 June 2006. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. Design of a second order sliding mode approach for DFIG-based wind energy systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 729–734. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. A comparison study between two sliding mode based controls for voltage sag mitigation in grid connected wind turbines. In Proceedings of the IEEE Conference on Control Applications, Sydney, Australia, 21–23 September 2015; pp. 1913–1918. [Google Scholar] [CrossRef]
- Mobayen, S.; Bayat, F.; Taheri, A.; Fekih, A. Adaptive nonsingular integral-type second order terminal sliding mode tracking controller for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2021, 19, 1539–1549. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. Design of a Chattering-free integral terminal sliding mode approach for DFIG-based wind energy systems. Optim. Control Appl. Methods 2020, 41, 1718–1734. [Google Scholar] [CrossRef]
- Shetssel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T.; Tounsi, M. Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators. Entropy 2022, 24, 1838. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Khan, L.; Al-Durra, A.; Ro, J.S. Integer and Fractional-Order Sliding Mode Control Schemes in Wind Energy Conversion Systems: Comprehensive Review, Comparison, and Technical Insight. Fractal Fract. 2022, 6, 447. [Google Scholar] [CrossRef]
- Elkodama, A.; Ismaiel, A.; Abdellatif, A.; Shaaban, S.; Yoshida, S.; Rushdi, M.A. Control Methods for Horizontal Axis Wind Turbines (HAWT): State-of-the-Art Review. Energies 2023, 16, 6394. [Google Scholar] [CrossRef]
- Sarkar, M.R.; Julai, S.; Tong, C.W.; Uddin, M.; Romlie, M.F.; Shafiullah, G. Hybrid Pitch Angle Controller Approaches for Stable Wind Turbine Power under Variable Wind Speed. Energies 2020, 13, 3622. [Google Scholar] [CrossRef]
- Tang, M.; Yi, J.; Wu, H.; Wang, Z. Fault Detection of Wind Turbine Electric Pitch System Based on IGWO-ERF. Sensors 2021, 21, 6215. [Google Scholar] [CrossRef] [PubMed]
- Benbouzid, M.; Berghout, T.; Sarma, N.; Djurović, S.; Wu, Y.; Ma, X. Intelligent Condition Monitoring of Wind Power Systems: State of the Art Review. Energies 2021, 14, 5967. [Google Scholar] [CrossRef]
- Odgaard, P.F.; Stoustrup, J.; Kinnaert, M. Fault-tolerant control of wind turbines: A benchmark model. IEEE Trans. Control Syst. Technol. 2013, 21, 1168–1182. [Google Scholar] [CrossRef]
- Geng, H.; Yang, G. Output power control for variable-speed variable-pitch wind generation systems. IEEE Trans. Energy Convers. 2010, 25, 494–503. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Siguerdidjane, H. Nonlinear control of a variable-speed wind turbine using a two-mass model. IEEE Trans. Energy Convers. 2011, 26, 149–162. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Hosseinzadeh, N.; Ektesabi, M. Comparison of fault-ride-through capability of dual and single-rotor wind turbines. Renew. Energy 2012, 48, 473–481. [Google Scholar]
- Mazare, M.; Taghizadeh, M.; Ghaf-Ghanbari, P. Pitch actuator fault-tolerant control of wind turbines based on time delay control and disturbance observer. Ocean. Eng. 2021, 238, 109724. [Google Scholar] [CrossRef]
- Fekih, A.; Habibi, H.; Simani, S. Fault Diagnosis and Fault Tolerant Control of Wind Turbines: An Overview. Energies 2022, 15, 7186. [Google Scholar] [CrossRef]
- Ren, Y.; Li, L.; Brindley, J.; Jiang, L. Nonlinear PI control for variable pitch wind turbine. Control Eng. Pract. 2016, 50, 84–94. [Google Scholar] [CrossRef]
- Ahmadian, H.; Lotfi, M.; Menhaj, M.B.; Talebi, H.A.; Sharifi, I. A novel 1 adaptive-hybrid control with guaranteed stability for a class of uncertain nonlinear systems: A case study on SA330 Puma. J. Frankl. Inst. 2022, 359, 9860–9885. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Definition | Unit | Value |
|---|---|---|---|
| rating | MW | 5 | |
| generator inertia | Kg·m2 | 61 | |
| rotor inertia | Kg·m2 | ||
| air density | Kg/m3 | 1.542 | |
| R | rotor radius | m | 40 |
| gearbox ratio | - | 78.569 | |
| rated generator torque | N·m | 7683.5 | |
| rated rotor speed | rad/s | 1.4824 | |
| drive-train spring factor | N·m/rad | ||
| drive-train damping factor | N·m·s/rad | ||
| pitch angle limit | deg | −1 to 90 | |
| pitch rate limit | deg/s | −10 to +10 |
| Faults | ||
|---|---|---|
| Healthy | 0.6 | 12.12 |
| High air content in oil | 0.45 | 6.37 |
| Pump wear | 0.75 | 8.82 |
| Pressure drop | 0.9 | 4.24 |
| Properties | Adaptive- | Adaptive- | Adaptive Control |
|---|---|---|---|
| Real-Time | 29.41 | 36.58 | 94.17 |
| CPU-Time | 28.66 | 35.74 | 92.63 |
| Ratio-Time | 5.075 | 4.167 | 1.379 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fayazi, A.; Ghayoumi Zadeh, H.; Ahmadian, H.; Ghane, M.; Seryasat, O.R.
Pitch Actuator Fault-Tolerant Control of Wind Turbines via an
Fayazi A, Ghayoumi Zadeh H, Ahmadian H, Ghane M, Seryasat OR.
Pitch Actuator Fault-Tolerant Control of Wind Turbines via an
Fayazi, Ali, Hossein Ghayoumi Zadeh, Hossein Ahmadian, Mahdi Ghane, and Omid Rahmani Seryasat.
2024. "Pitch Actuator Fault-Tolerant Control of Wind Turbines via an
Fayazi, A., Ghayoumi Zadeh, H., Ahmadian, H., Ghane, M., & Seryasat, O. R.
(2024). Pitch Actuator Fault-Tolerant Control of Wind Turbines via an