

Sensorless Capability Expansion for SPMSM Based on Inductance Parameter Identification



Abstract
1. Introduction
2. Conventional Pulsating High-Frequency Voltage Injection
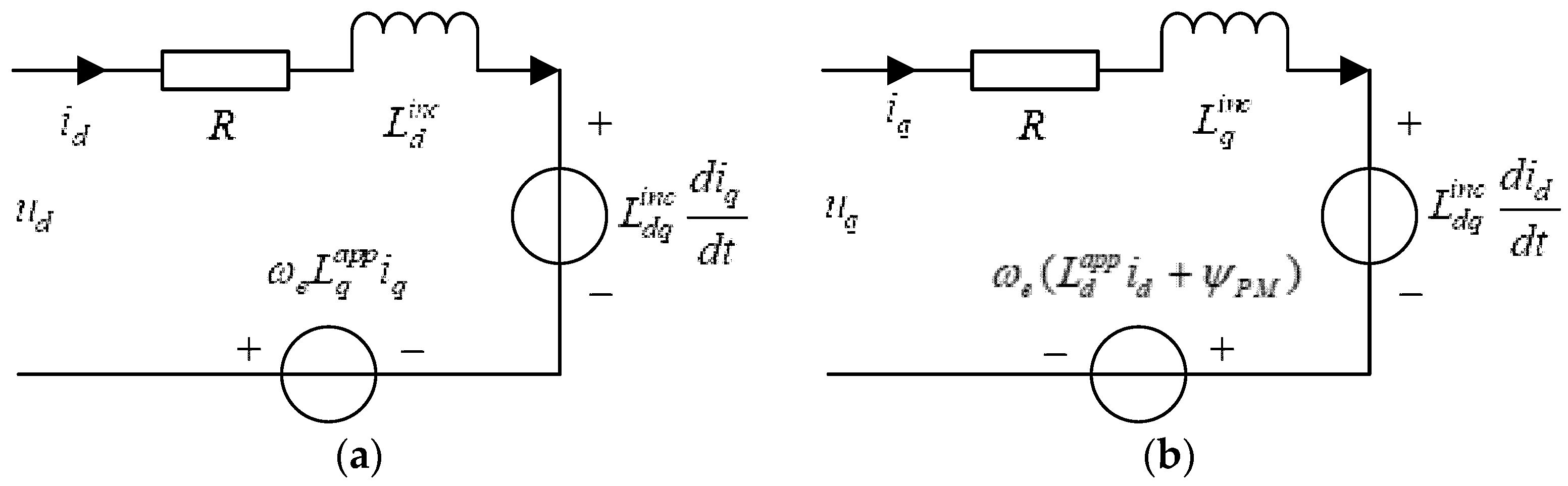
2.1. Incremental Inductance and Apparent Inductance
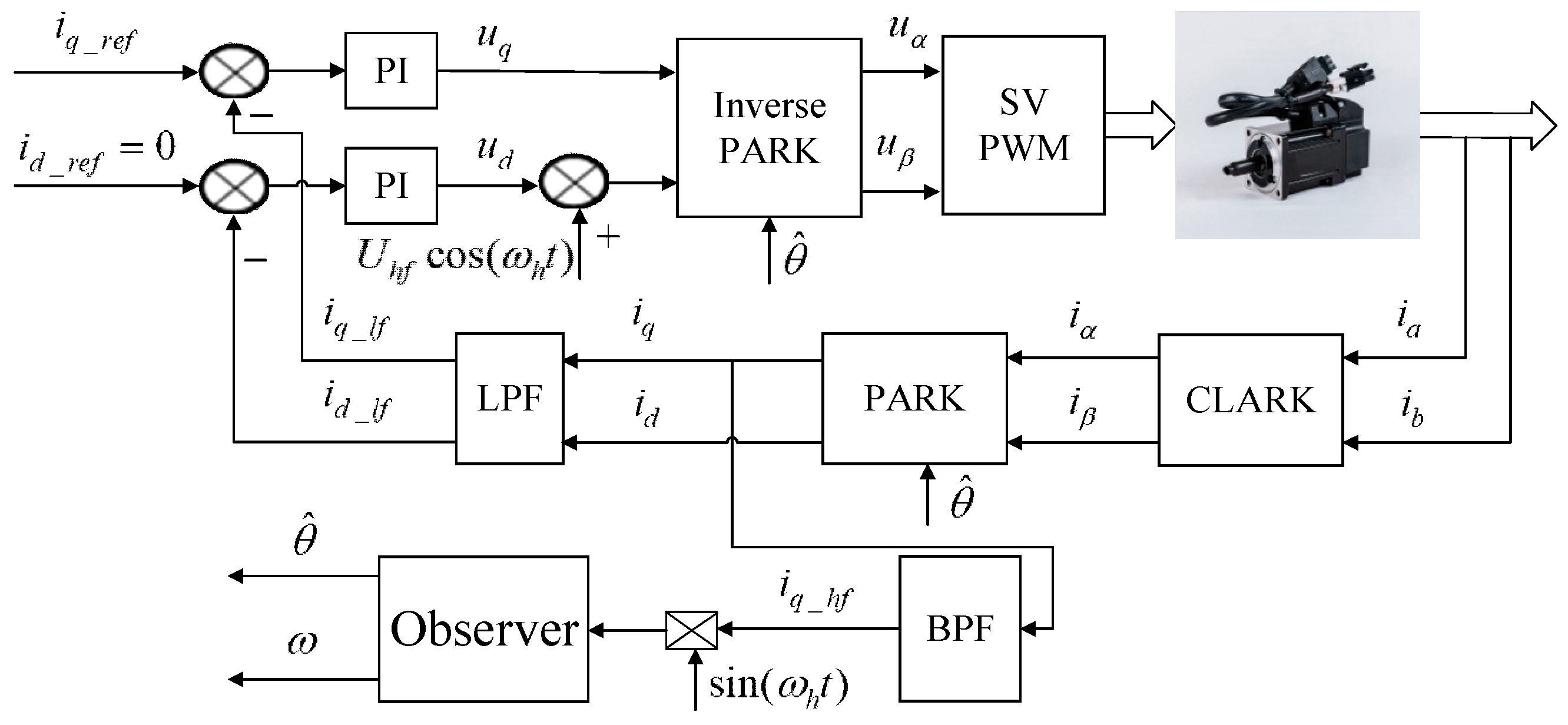
2.2. Conventional Pulsating High-Frequency Voltage Injection Method
2.3. Issues of the Conventional Pulsating High-Frequency Voltage Injection Method
- The saliency ratio is small, and it decreases with the increase in load. There is no structure saliency for the SPMSM, and the saturation saliency is weak even when the HF voltage is injected. The saliency ratio may be less than 1 when the motor is operating at heavy load status.
- The accuracy of position estimation is degraded due to the cross-coupling effect. Lots of research has been carried out to compensate for the estimation error due to the cross-coupling effect. However, the cross-coupling inductance is small, and it varies with the increase in load; therefore, it is a great challenge to identify the cross-coupling inductance and improve the accuracy of rotor position estimation.
3. The Proposed Sensorless Capability Expansion Method
3.1. Inductance Parameter Identification
3.1.1. Incremental Inductance Identification
3.1.2. Apparent Inductance Identification
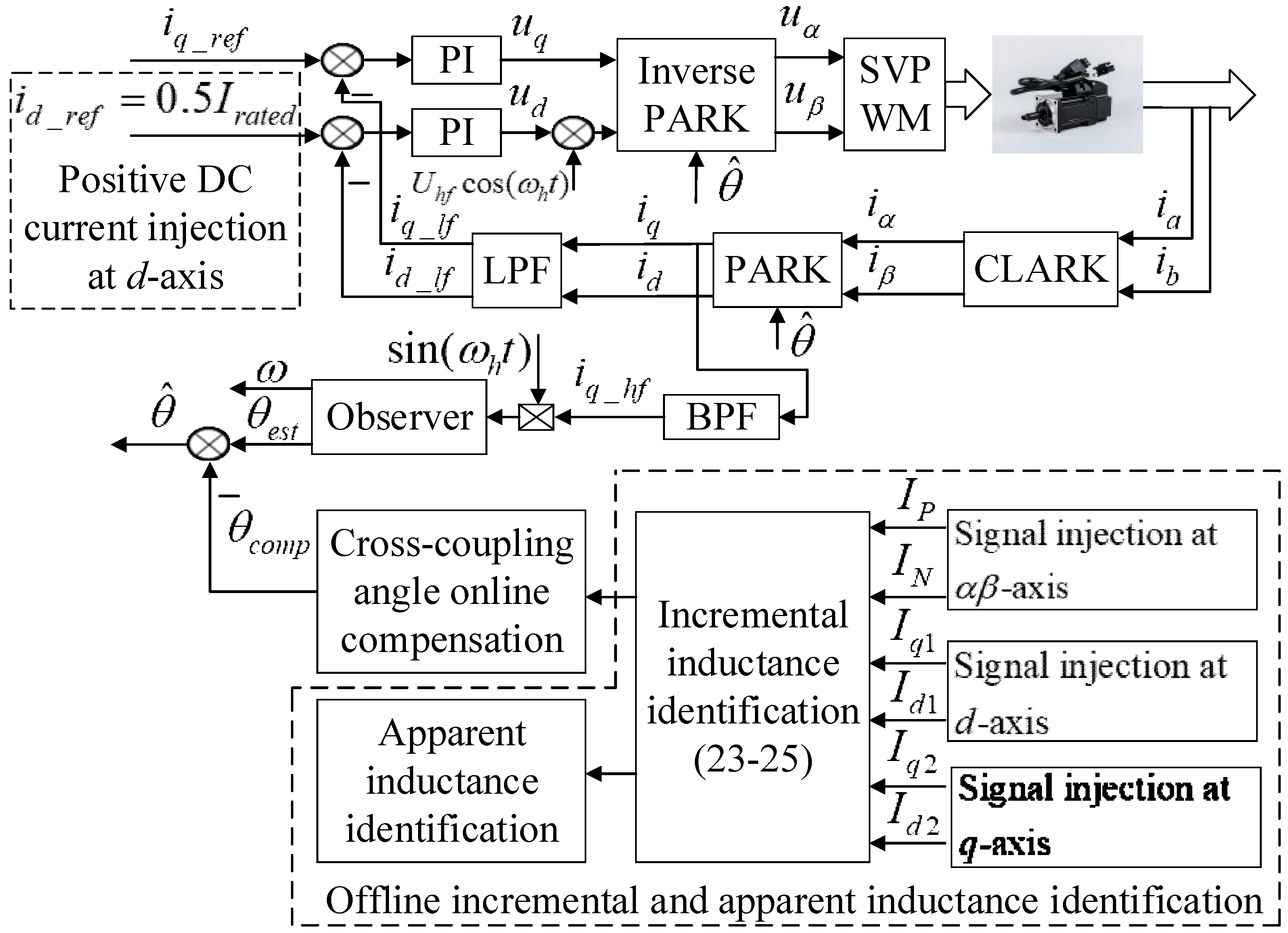
3.2. Sensorless Capability Expansion
4. Experimental Verification
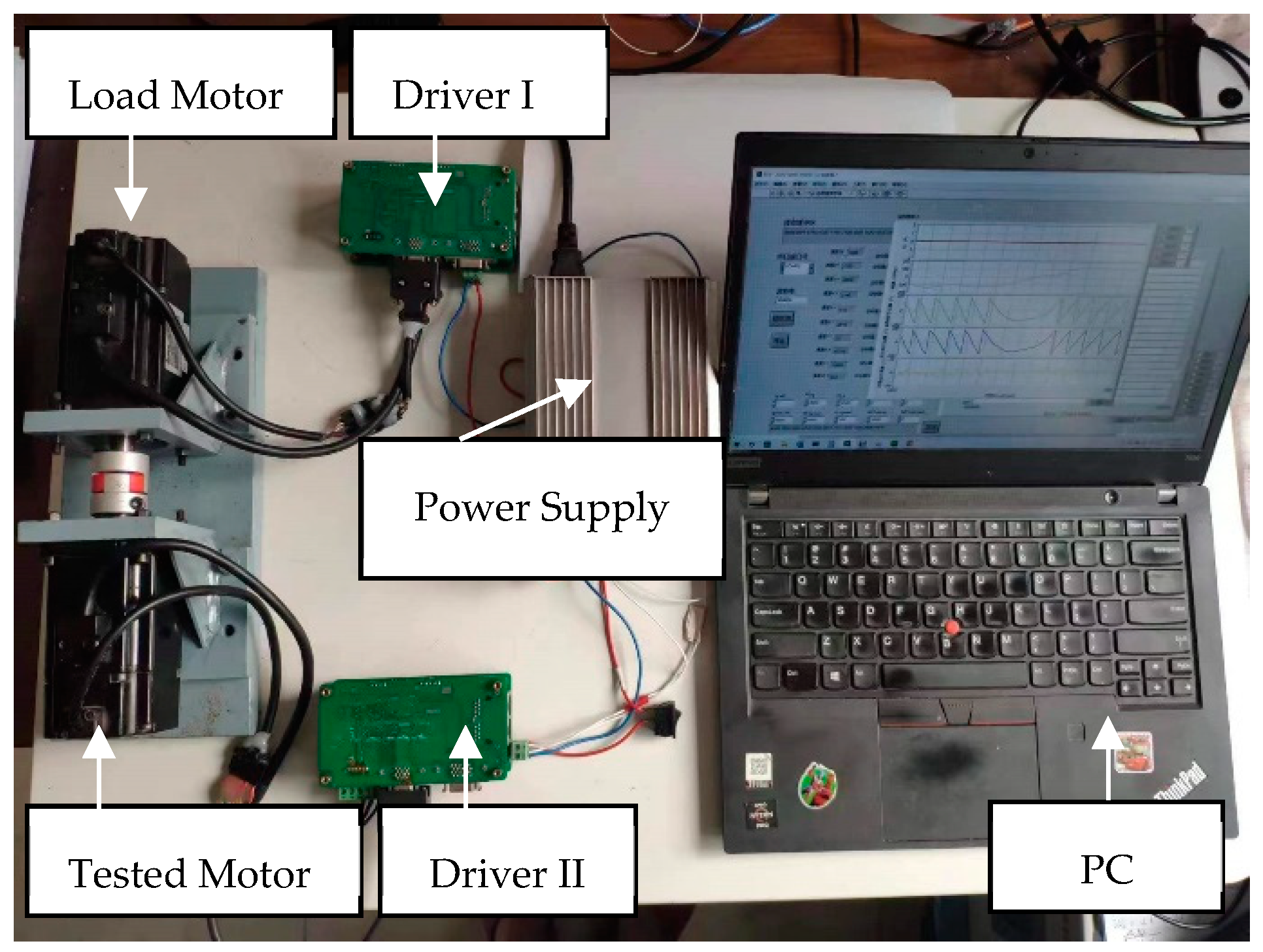
4.1. Experimental Platform
4.2. Inductance Parameter Identification
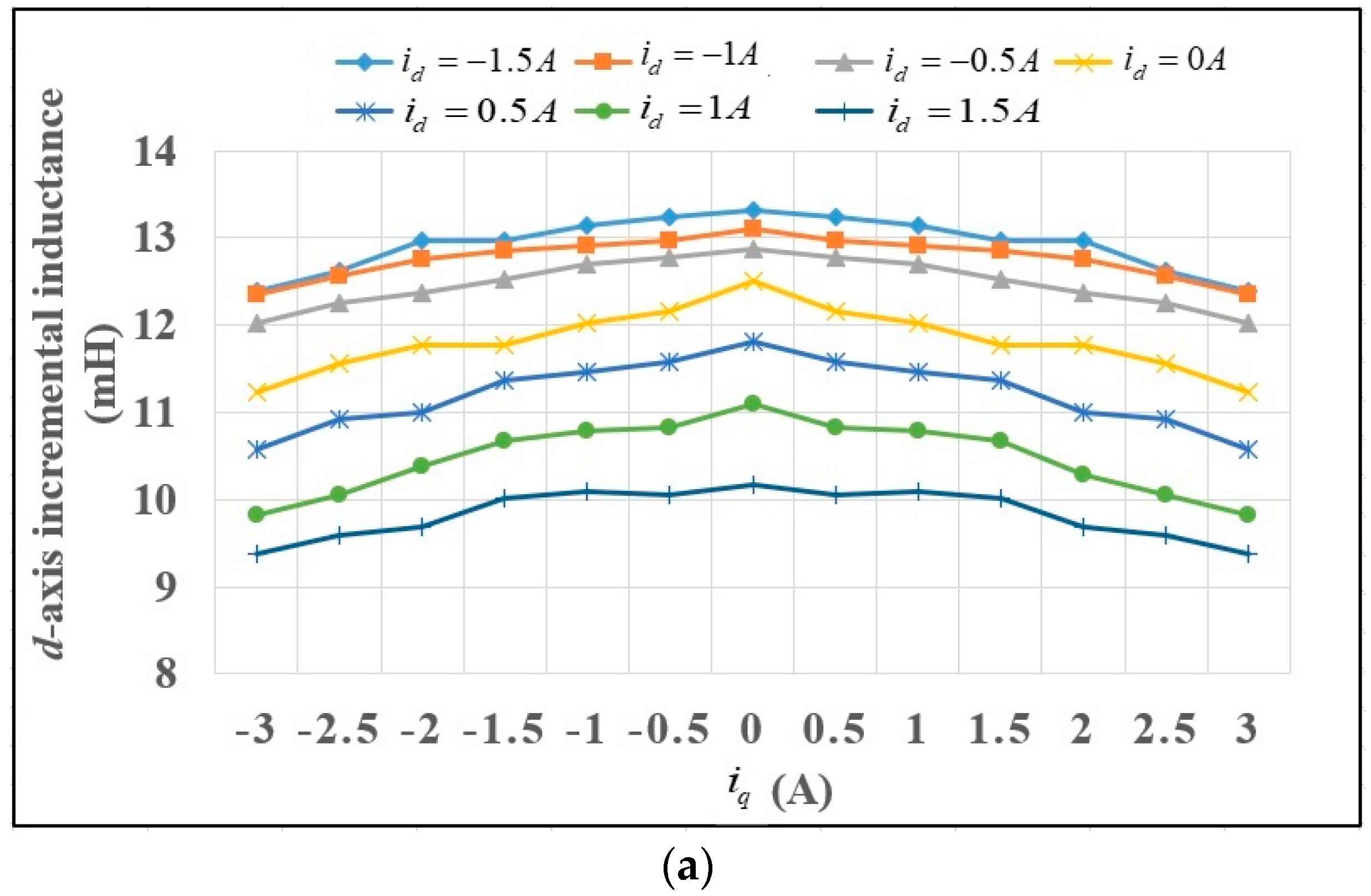
4.2.1. Incremental Inductance Identification
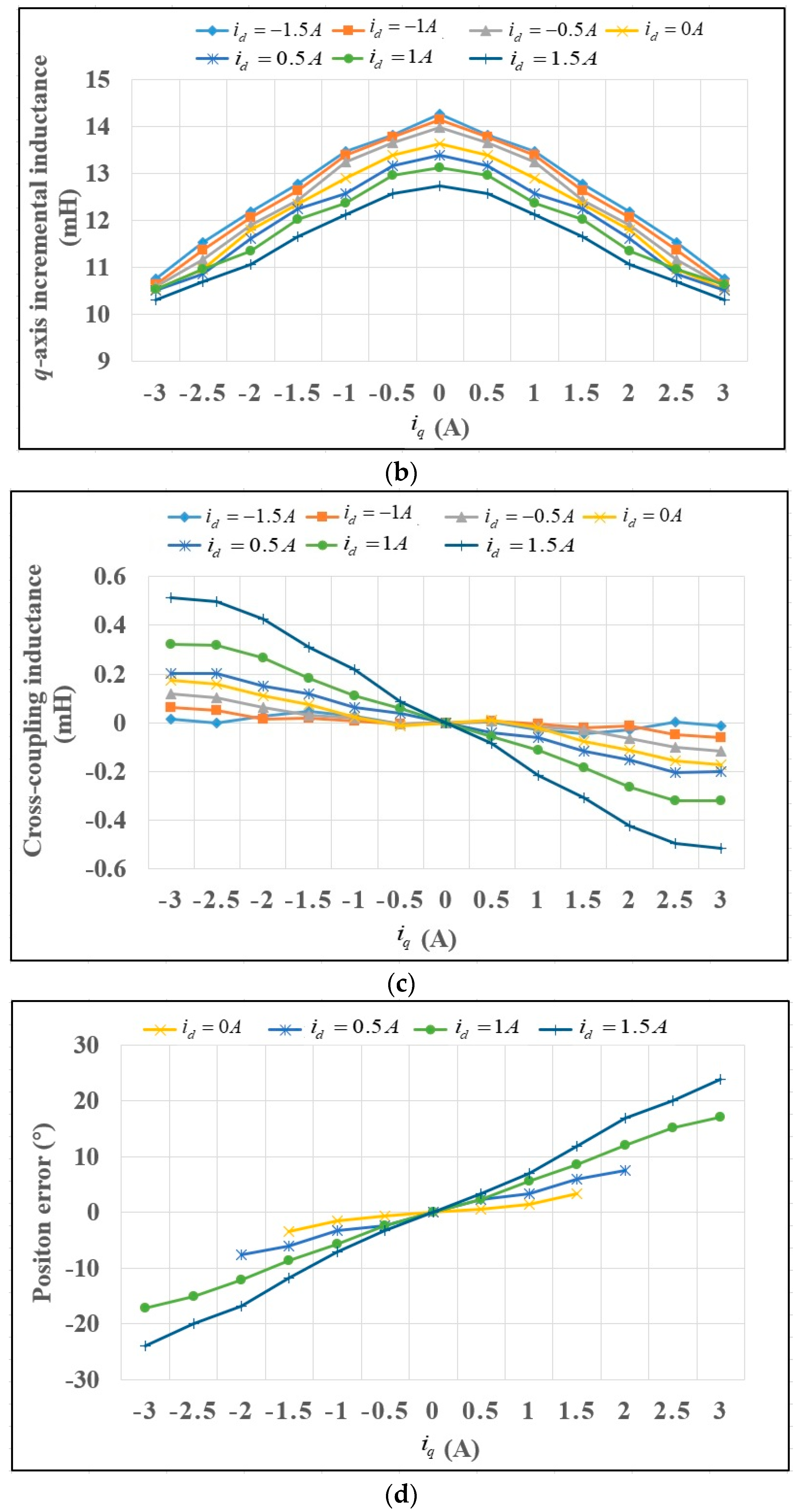
4.2.2. Apparent Inductance Identification
4.3. Sensorless Capability Expansion
4.3.1. Saliency Ratio Improvement
- The saliency ratio decreases as increases. This is because is more sensitive than to the variation of . The saliency ratio is less than 1 in severe cases.
- The saliency ratio can be enhanced when a positive DC current is injected into the d-axis. Taking (130% rated current) as an example, the saliency ratio is less than 1 using the conventional or method. It can be predicted that the HF voltage injection method would fail at these working points. On the contrary, the saliency ratio gradually increases with the positive value of , and the saliency ratio reaches 1.13 when .
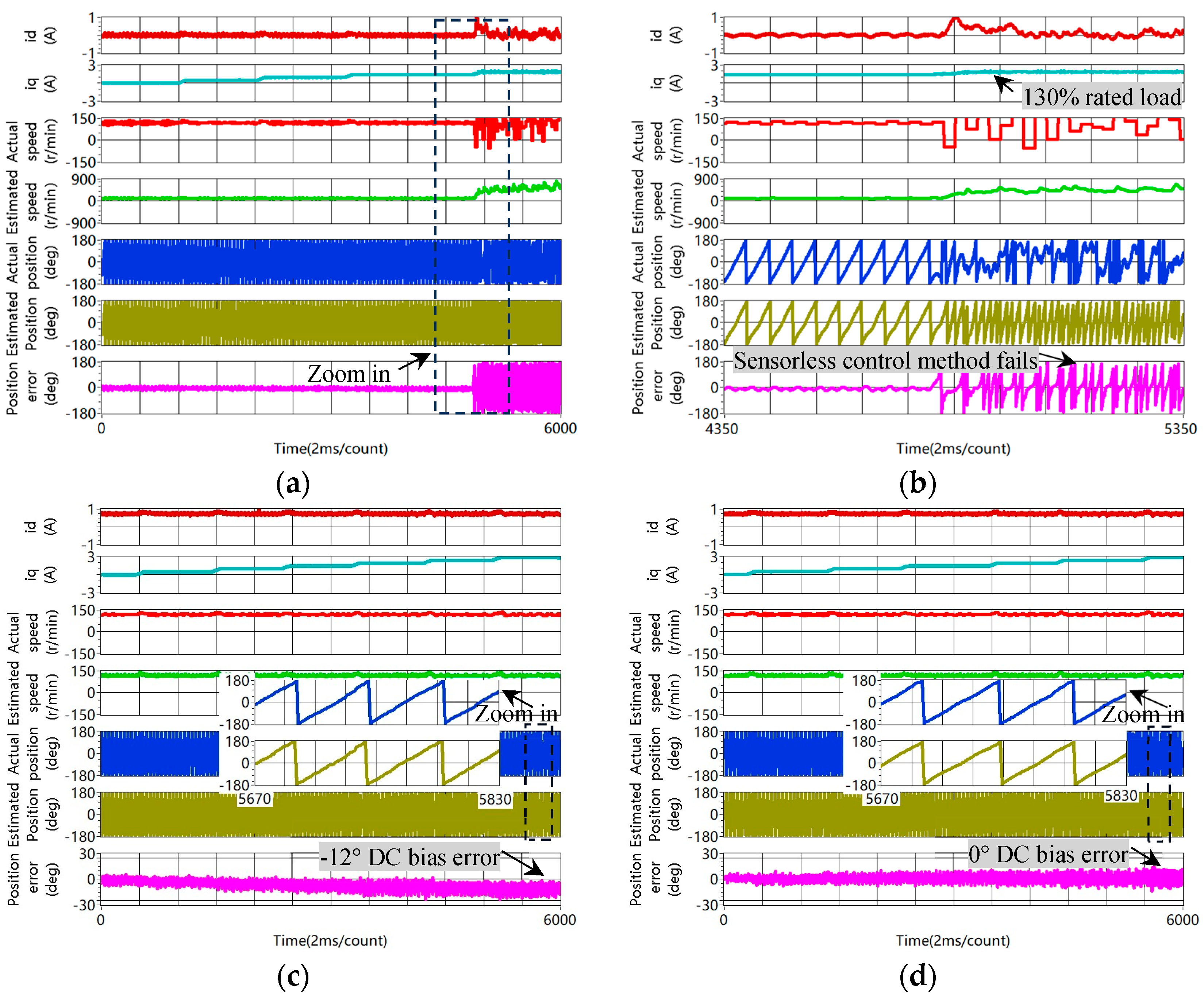
4.3.2. Convergence Region Expansion
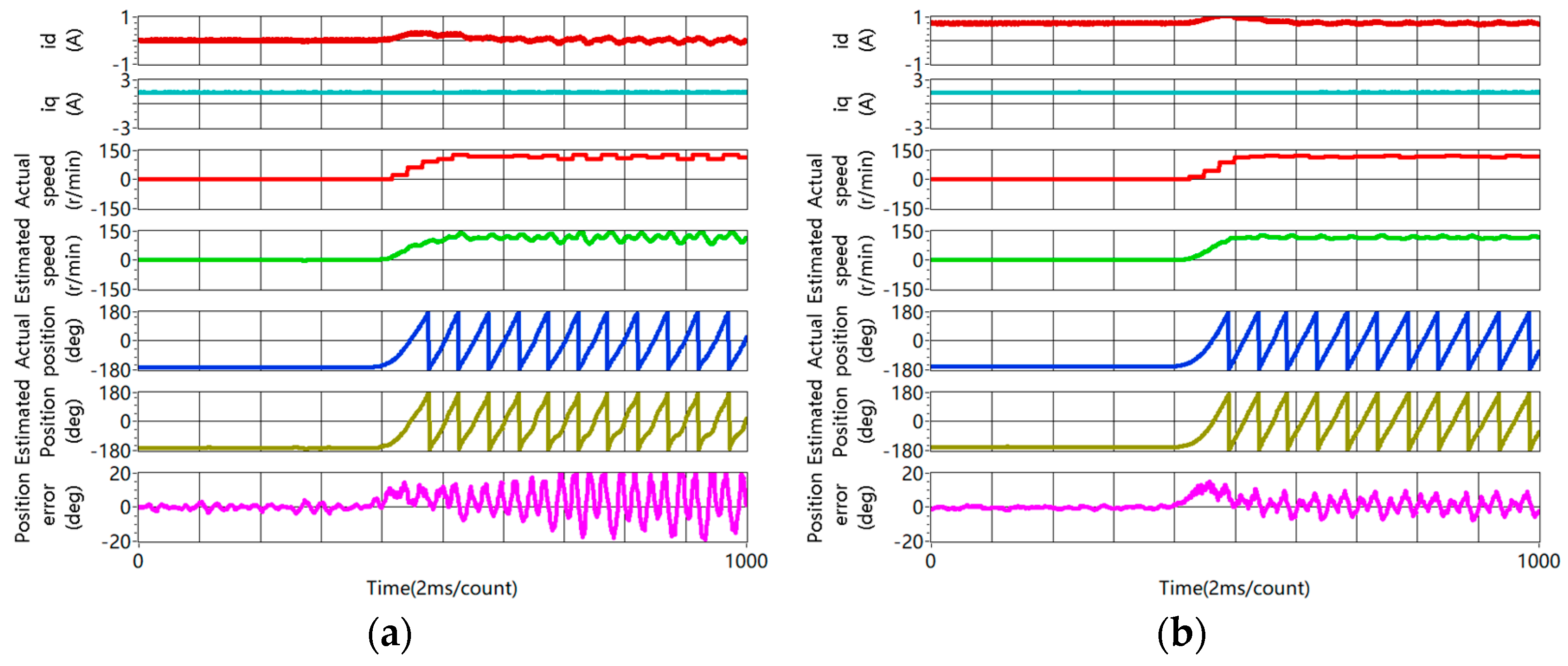
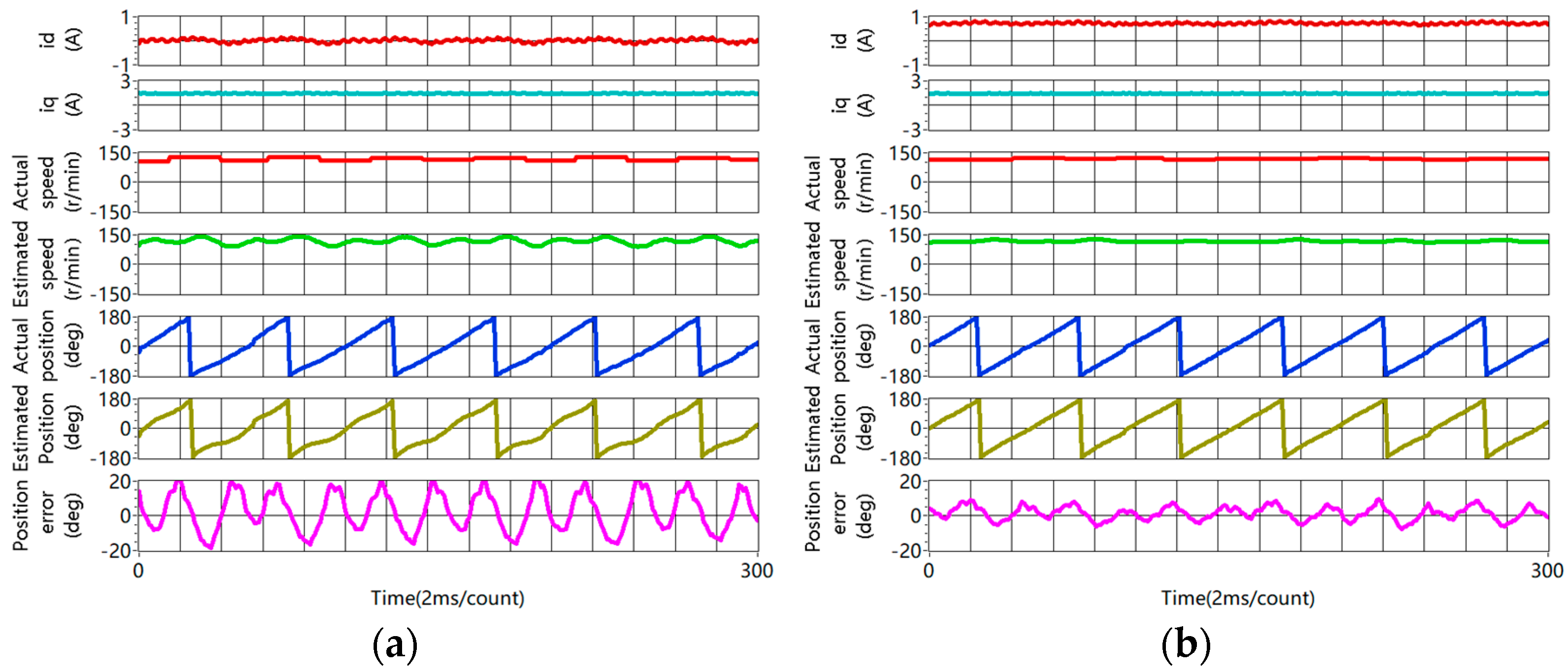
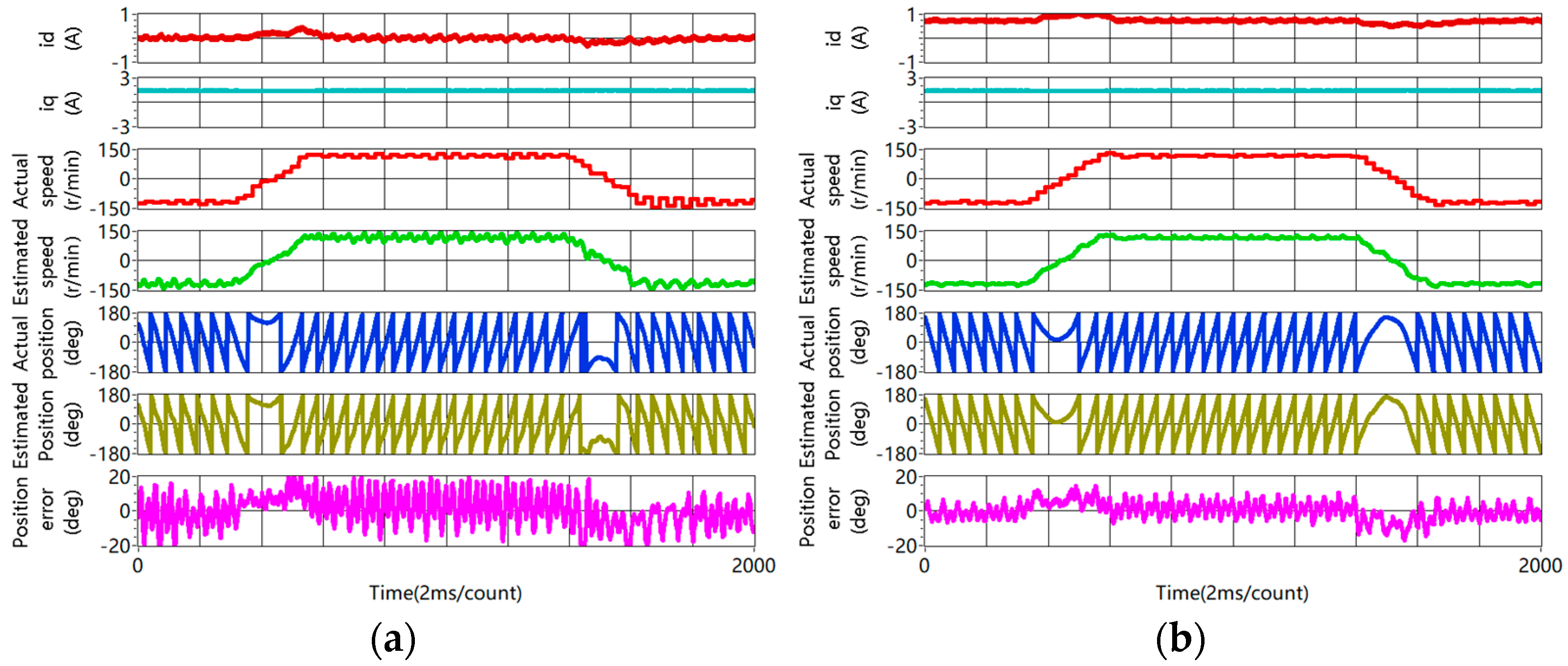
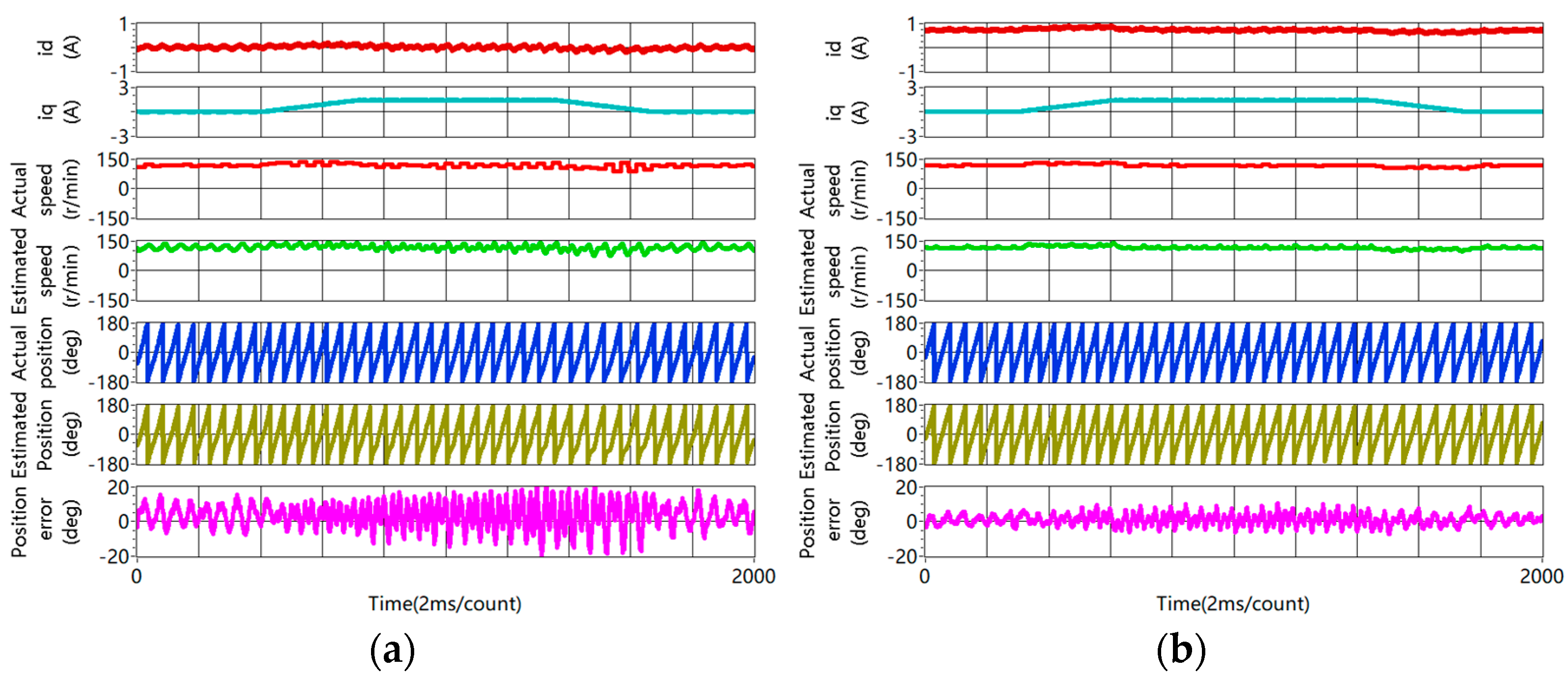
4.3.3. Accuracy of Rotor Position Estimation Improvement
5. Conclusions
- Incremental inductances are identified offline in three steps combining the rotating high-frequency voltage injection and pulsating high-frequency voltage injection. Then, a polynomial curve fitting algorithm is proposed for apparent inductance identification.
- The saliency ratio is enhanced by injecting a positive DC current into the d-axis. Compared with the conventional or method, the saturation level at the d-axis is enhanced and the saliency ratio is improved obviously.
- The convergence region of the pulsating high–frequency voltage injection method is expanded at heavy load status. Using the conventional method, the sensorless control method fails at a 120% rated current. On the contrary, using the proposed method, the rotor position estimation works well at a 200% rated current.
- The experimental results show that the accuracy of rotor position estimation is improved obviously at the steady state and during the dynamic process.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Berto, M.; Alberti, L.; Manzolini, V.; Bolognani, S. Computation of Self-Sensing Capabilities of Synchronous Machines for Rotating High Frequency Voltage Injection Sensorless Control. IEEE Trans. Ind. Electron. 2022, 69, 3324–3333. [Google Scholar] [CrossRef]
- Lee, Y.; Sul, S.-K. Model-Based Sensorless Control of an IPMSM with Enhanced Robustness Against Load Disturbances Based on Position and Speed Estimator Using a Speed Error. IEEE Trans. Ind. Appl. 2018, 54, 1448–1459. [Google Scholar] [CrossRef]
- Naderian, M.; Markadeh, G.A.; Karimi-Ghartemani, M.; Mojiri, M. Improved Sensorless Control Strategy for IPMSM Using an ePLL Approach With High-Frequency Injection. IEEE Trans. Ind. Electron. 2024, 71, 2231–2241. [Google Scholar] [CrossRef]
- Ortombina, L.; Berto, M.; Alberti, L. Sensorless Drive for Salient Synchronous Motors Based on Direct Fitting of Elliptical-Shape High-Frequency Currents. IEEE Trans. Ind. Electron. 2023, 70, 3394–3403. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, Z.; Liu, J.; Zhang, R.; Sun, X. IPMSM Sensorless Control Using High-Frequency Voltage Injection Method with Random Switching Frequency for Audible Noise Improvement. IEEE Trans. Ind. Electron. 2020, 67, 6019–6030. [Google Scholar] [CrossRef]
- Jang, J.-H.; Sul, S.-K.; Ha, J.-I.; Ide, K.; Sawamura, M. Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency. IEEE Trans. Ind. Appl. 2003, 39, 1031–1039. [Google Scholar] [CrossRef]
- Berto, M.; Alberti, L.; Bolognani, S. Measurement of the Self-Sensing Capability of Synchronous Machines for High Frequency Signal Injection Sensorless Drives. IEEE Trans. Ind. Appl. 2023, 59, 3381–3389. [Google Scholar] [CrossRef]
- Manzolini, V.; Bolognani, S. On the Rotor Position Self-Sensing Capability of Reluctance and IPM Synchronous Motors. IEEE Trans. Ind. Appl. 2020, 56, 3755–3766. [Google Scholar] [CrossRef]
- Frenzke, T. Impacts of cross-saturation on sensorless control of surface permanent magnet synchronous motors. In Proceeding of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Lin, T.C.; Zhu, Z.Q. Sensorless Operation Capability of Surface-Mounted Permanent-Magnet Machine Based on High-Frequency Signal Injection Methods. IEEE Trans. Ind. Appl. 2015, 51, 2161–2171. [Google Scholar] [CrossRef]
- Kano, Y.; Matsui, N. Rotor Geometry Design of Saliency-Based Sensorless Controlled Distributed-Winding IPMSM for Hybrid Electric Vehicles. IEEE Trans. Ind. Appl. 2018, 54, 2336–2348. [Google Scholar] [CrossRef]
- Millinger, J.; Bacco, G.; Manzolini, V.; Wallmark, O.; Bianchi, N. Design and Evaluation of a Short-Circuit Rotor-Ring for Enhanced Self-Sensing Capability in a Slotless PM Motor. IEEE Trans. Ind. Electron. 2020, 67, 3462–3471. [Google Scholar] [CrossRef]
- Ponomarev, P.; Petrov, I.; Pyrhönen, J. Influence of Travelling Current Linkage Harmonics on Inductance Variation, Torque Ripple and Sensorless Capability of Tooth-Coil Permanent-Magnet Synchronous Machines. IEEE Trans. Magn. 2014, 50, 1–8. [Google Scholar] [CrossRef]
- Kwon, Y.-C.; Lee, J.; Sul, S.-K. Extending Operational Limit of IPMSM in Signal-Injection Sensorless Control by Manipulation of Convergence Point. IEEE Trans. Ind. Appl. 2019, 55, 1574–1586. [Google Scholar] [CrossRef]
- Lee, J.; Kwon, Y.-C.; Sul, S.-K. Signal-Injection Sensorless Control with Tilted Current Reference for Heavily Saturated IPMSMs. IEEE Trans. Power Electron. 2020, 35, 12100–12109. [Google Scholar] [CrossRef]
- Wang, H.; Lu, K.; Wang, D.; Blaabjerg, F. Simple and Effective Online Position Error Compensation Method for Sensorless SPMSM Drives. IEEE Trans. Ind. Appl. 2020, 56, 1475–1484. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Jung, J.-W. A Comprehensive Review of State-of-the-Art Parameter Estimation Techniques for Permanent Magnet Synchronous Motors in Wide Speed Range. IEEE Trans. Ind. Electron. 2020, 16, 4747–4758. [Google Scholar] [CrossRef]
- Ceylan, D.; Friedrich, L.A.J.; Boynov, K.O.; Lomonova, E.A. Effects of DC-Field Excitation on the Incremental Inductance of a Variable Flux Reluctance Machine. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Chen, J.; Li, J.; Qu, R.; Ge, M. Magnet-Frozen-Permeability FEA and DC-Biased Measurement for Machine Inductance: Application on a Variable-Flux PM Machine. IEEE Trans. Ind. Electron. 2018, 65, 4599–4607. [Google Scholar] [CrossRef]
- Pellegrino, G.; Boazzo, B.; Jahns, T.M. Magnetic Model Self-Identification for PM Synchronous Machine Drives. IEEE Trans. Ind. Appl. 2015, 51, 2246–2254. [Google Scholar] [CrossRef]
- Stumberger, B.; Stumberger, G.; Dolinar, D.; Hamler, A.; Trlep, M. Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, Y.; Sun, M. Enhancing Low-Speed Sensorless Control of PMSM Using Phase Voltage Measurements and Online Multiple Parameter Identification. IEEE Trans. Power Electron. 2020, 35, 10700–10710. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, N.; Wang, G.; Zhao, S.; Chen, Z.; Zhang, G.; Xu, D. An Offline Parameter Self-Learning Method Considering Inverter Nonlinearity With Zero-Axis Voltage. IEEE Trans. Power Electron. 2021, 36, 14098–14109. [Google Scholar] [CrossRef]
- Xu, W.; Lorenz, R.D. High-Frequency Injection-Based Stator Flux Linkage and Torque Estimation for DB-DTFC Implementation on IPMSMs Considering Cross-Saturation Effects. IEEE Trans. Ind. Appl. 2014, 50, 3805–3815. [Google Scholar] [CrossRef]
- Shuang, B.; Zhu, Z.-Q. A Novel Method for Estimating the High Frequency Incremental DQ-Axis and Cross-Coupling Inductances in Interior Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Appl. 2021, 57, 4913–4923. [Google Scholar] [CrossRef]
- Shuang, B.; Zhu, Z.Q.; Wu, X. Improved Cross-coupling Effect Compensation Method for Sensorless Control of IPMSM with High Frequency Voltage Injection. IEEE Trans. Energy Convers. 2022, 37, 347–358. [Google Scholar] [CrossRef]
- Huang, Z.; Lin, C.; Xing, J. A Parameter-Independent Optimal Field-Weakening Control Strategy of IPMSM for Electric Vehicles Over Full Speed Range. IEEE Trans. Power Electron. 2021, 36, 4659–4671. [Google Scholar] [CrossRef]
- Ryu, J.-Y.; Hwang, S.-W.; Chin, J.-W.; Hwang, Y.-S.; Yoon, S.W.; Lim, M.-S. Mathematical Modeling of Fast and Accurate Coupled Electromagnetic-Thermal Analysis. IEEE Trans. Ind. Appl. 2021, 57, 4636–4645. [Google Scholar] [CrossRef]
- Aggarwal, A.; Allafi, I.M.; Strangas, E.G.; Agapiou, J.S. Off-Line Detection of Static Eccentricity of PMSM Robust to Machine Operating Temperature and Rotor Position Misalignment Using Incremental Inductance Approach. IEEE Trans. Transp. Electrif. 2021, 7, 161–169. [Google Scholar] [CrossRef]
- Liu, Z.; Fan, X.; Kong, W.; Cao, L.; Qu, R. Improved Small-Signal Injection-Based Online Multiparameter Identification Method for IPM Machines Considering Cross-Coupling Magnetic Saturation. IEEE Trans. Power Electron. 2022, 37, 14362–14374. [Google Scholar] [CrossRef]
- Seilmeier, M.; Piepenbreier, B. Identification of steady-state inductances of PMSM using polynomial representations of the flux surfaces. In Proceeding of the IECON 2013–39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Feng, G.; Lai, C.; Han, Y.; Kar, N.C. Fast Maximum Torque Per Ampere (MTPA) Angle Detection for Interior PMSMs Using Online Polynomial Curve Fitting. IEEE Trans. Power Electron. 2022, 37, 2045–2056. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Item | Value |
|---|---|---|---|
| Rated voltage | 110 V | Pole pairs | 5 |
| Rated current | 1.5 A | Phase resistance | 2.8 Ω |
| Rated power | 200 W | d-axis inductance | 13 mH |
| Rated torque | 0.64 Nm | q-axis inductance | 13 mH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Ma, R.; Song, S.; Chen, Z. Sensorless Capability Expansion for SPMSM Based on Inductance Parameter Identification. Energies 2024, 17, 3219. https://doi.org/10.3390/en17133219
Chen P, Ma R, Song S, Chen Z. Sensorless Capability Expansion for SPMSM Based on Inductance Parameter Identification. Energies. 2024; 17(13):3219. https://doi.org/10.3390/en17133219
Chicago/Turabian StyleChen, Peng, Ruiqing Ma, Shoujun Song, and Zhe Chen. 2024. "Sensorless Capability Expansion for SPMSM Based on Inductance Parameter Identification" Energies 17, no. 13: 3219. https://doi.org/10.3390/en17133219
APA StyleChen, P., Ma, R., Song, S., & Chen, Z. (2024). Sensorless Capability Expansion for SPMSM Based on Inductance Parameter Identification. Energies, 17(13), 3219. https://doi.org/10.3390/en17133219