
Double-Swing Spring Origami Triboelectric Nanogenerators for Self-Powered Ocean Monitoring

 , ,
, , 
Abstract
1. Introduction
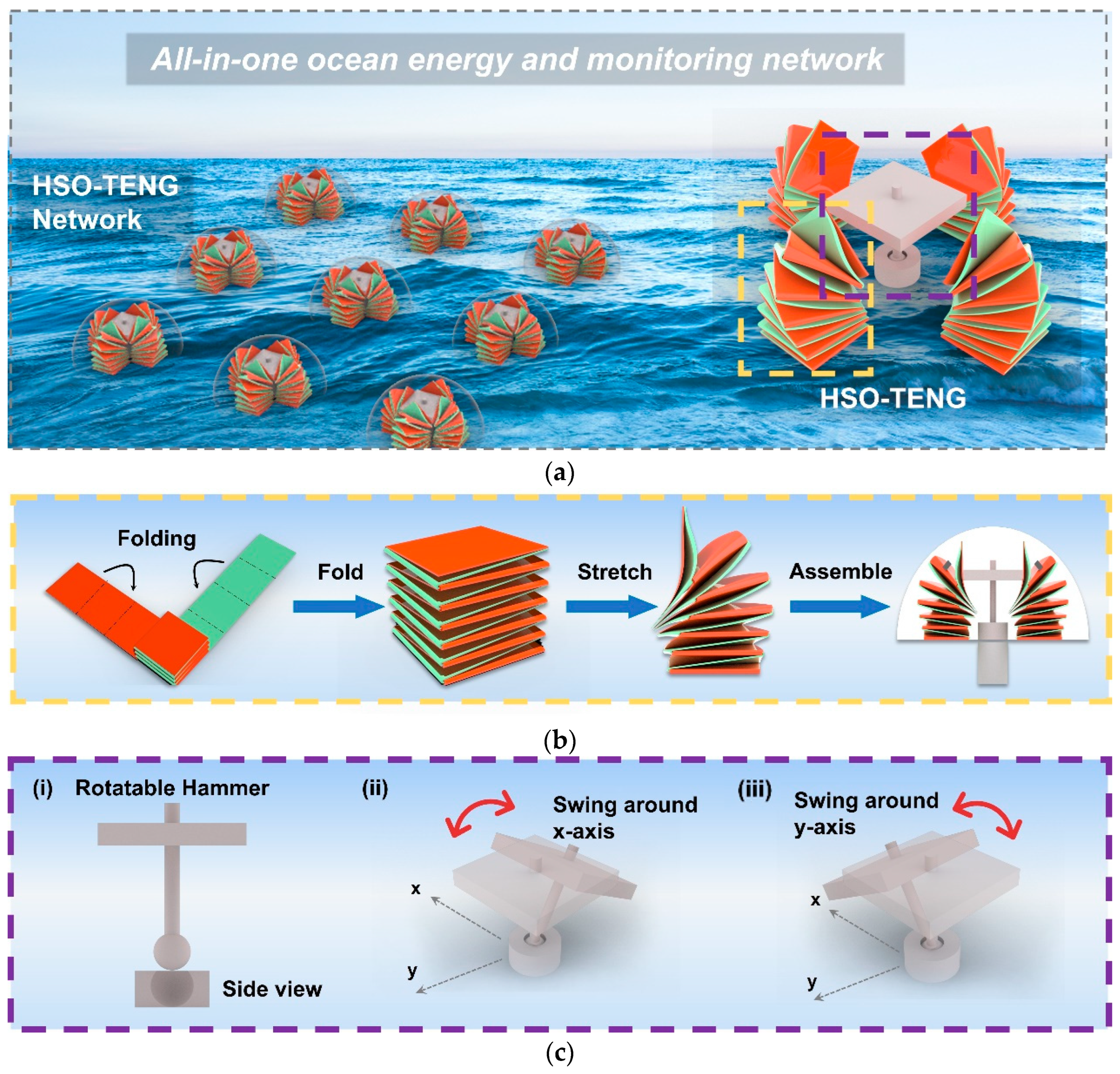
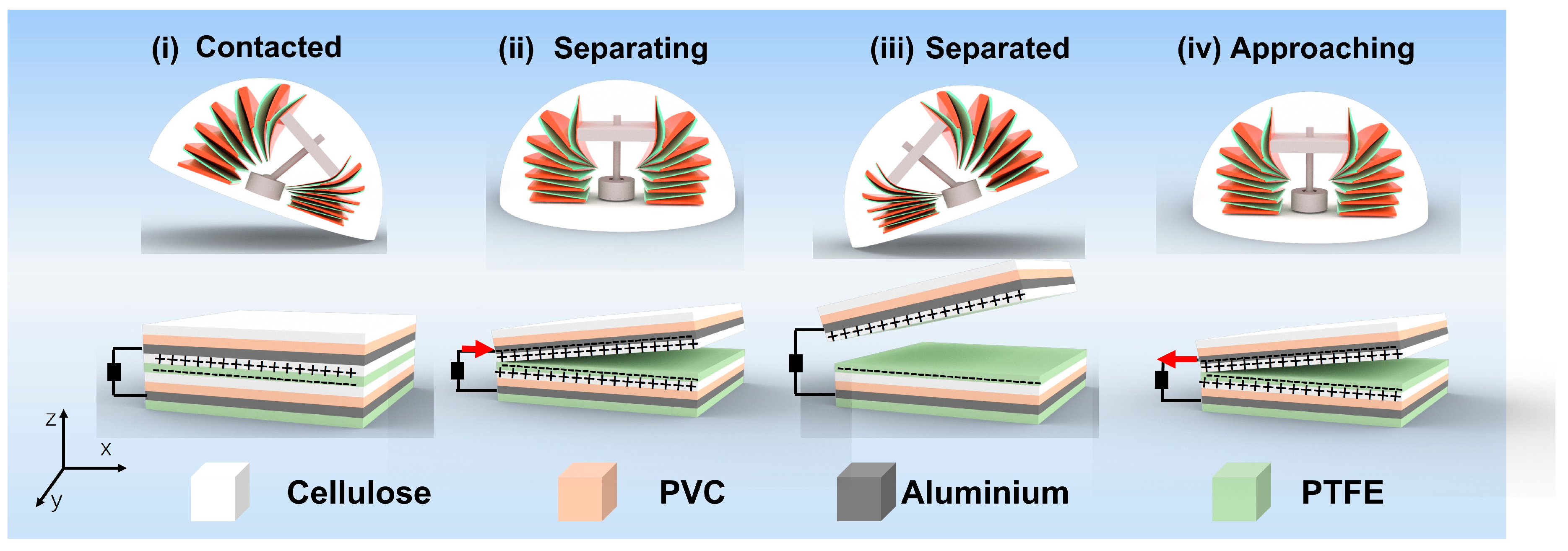
2. Overview of the HSO-TENG
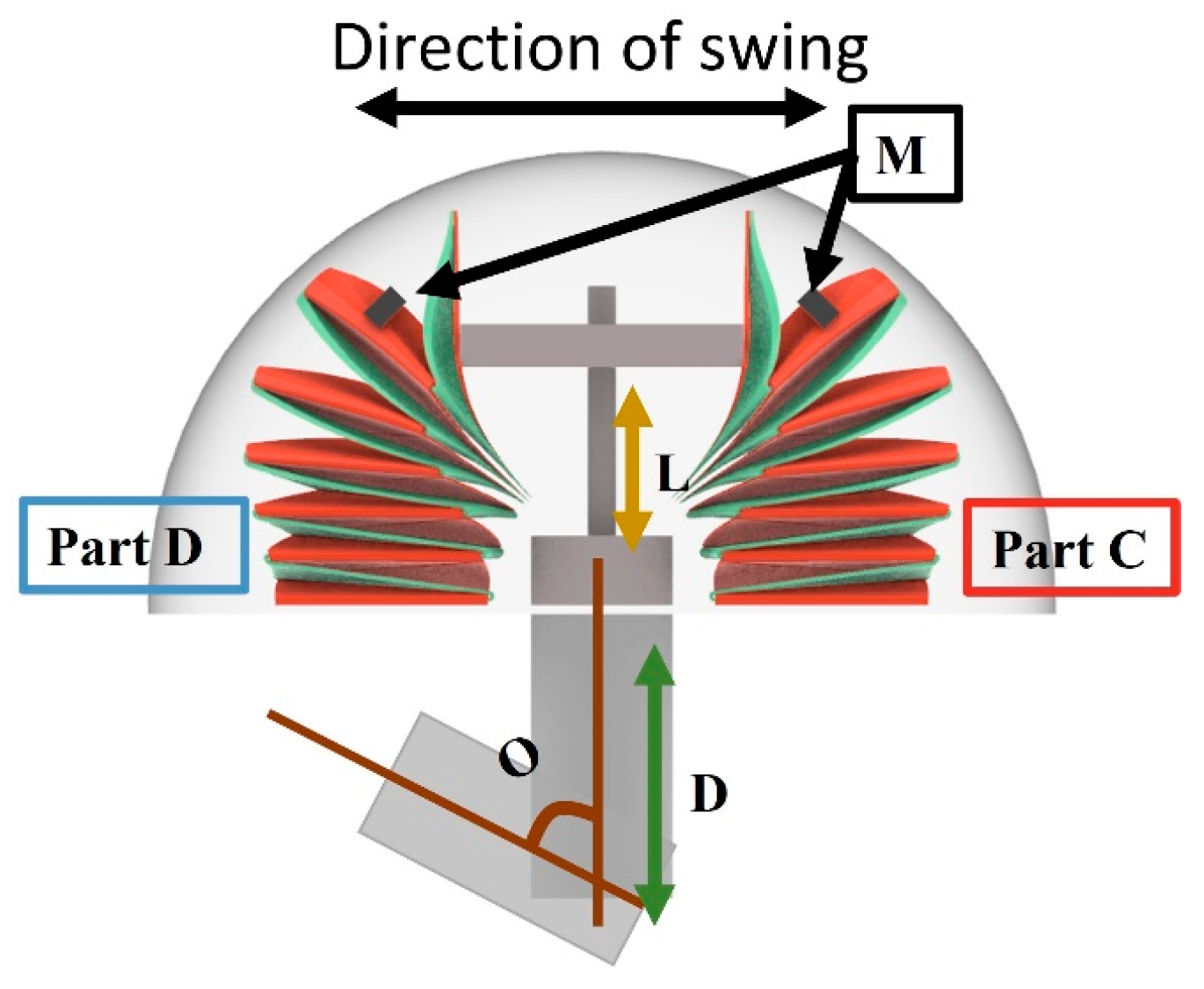
3. Structure Optimization Based on Swinging Experiment
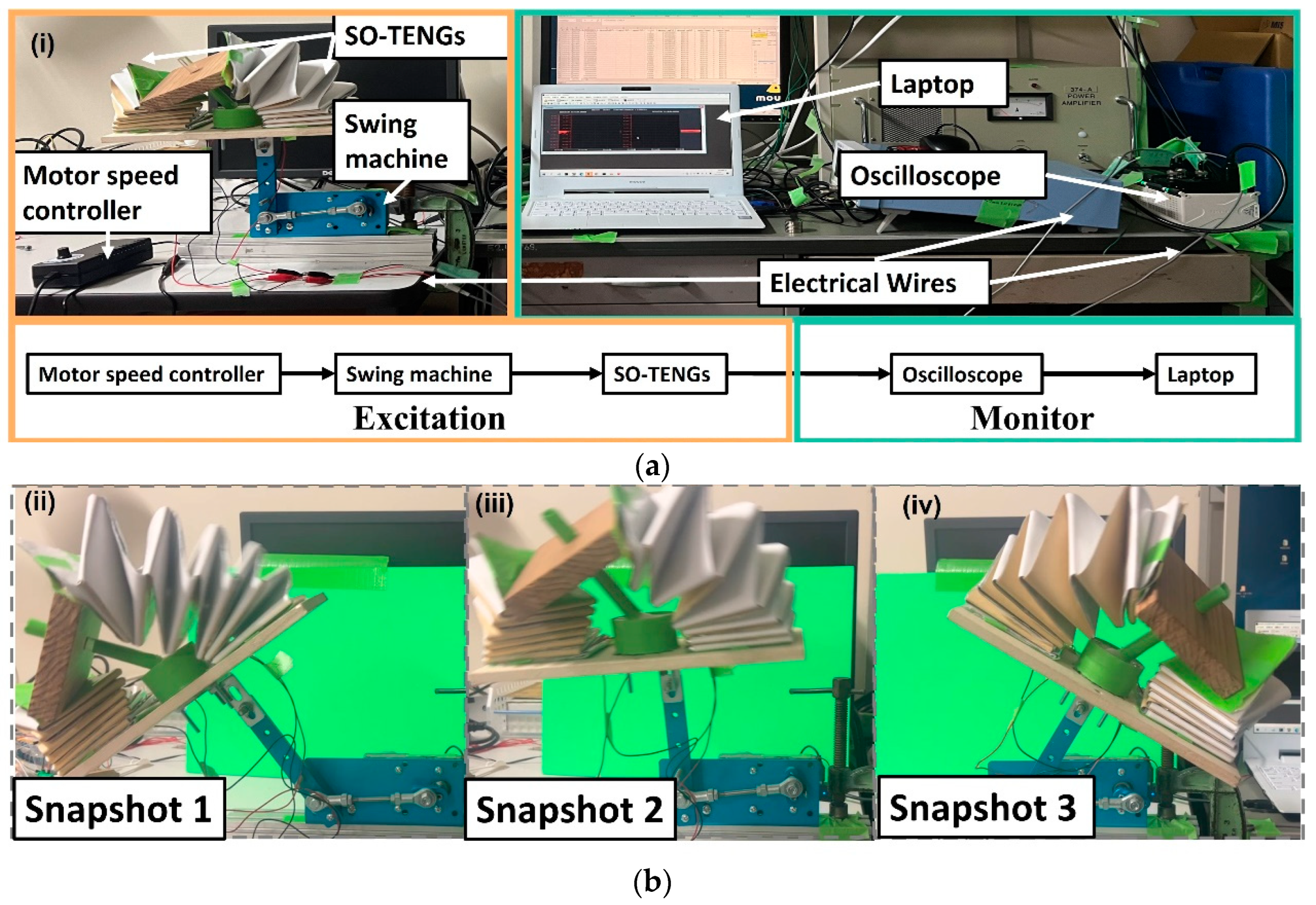
3.1. Experimental Setup of Swinging Experiment
3.2. Results and Discussion
4. Performance of HSO-TENG in Experimental and Numerical Unidirectional Wave Tank
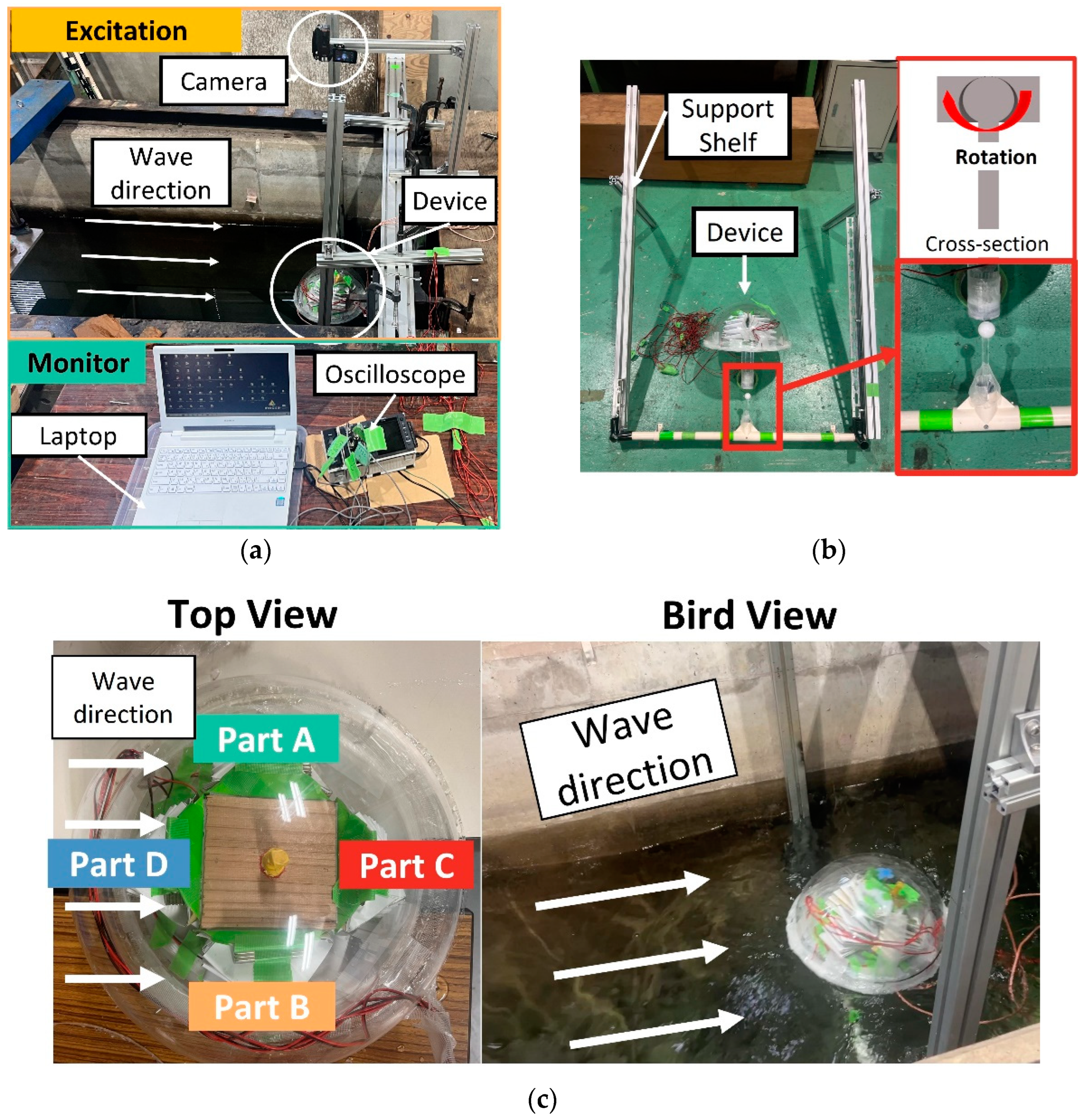
4.1. Experimental Setup of Unidirectional Wave Tank
4.2. Numerical Conditions in Unidirectional Wave Tank Based on SPH Method
4.3. Selection of Fixed Conditions Based on Numerical Model
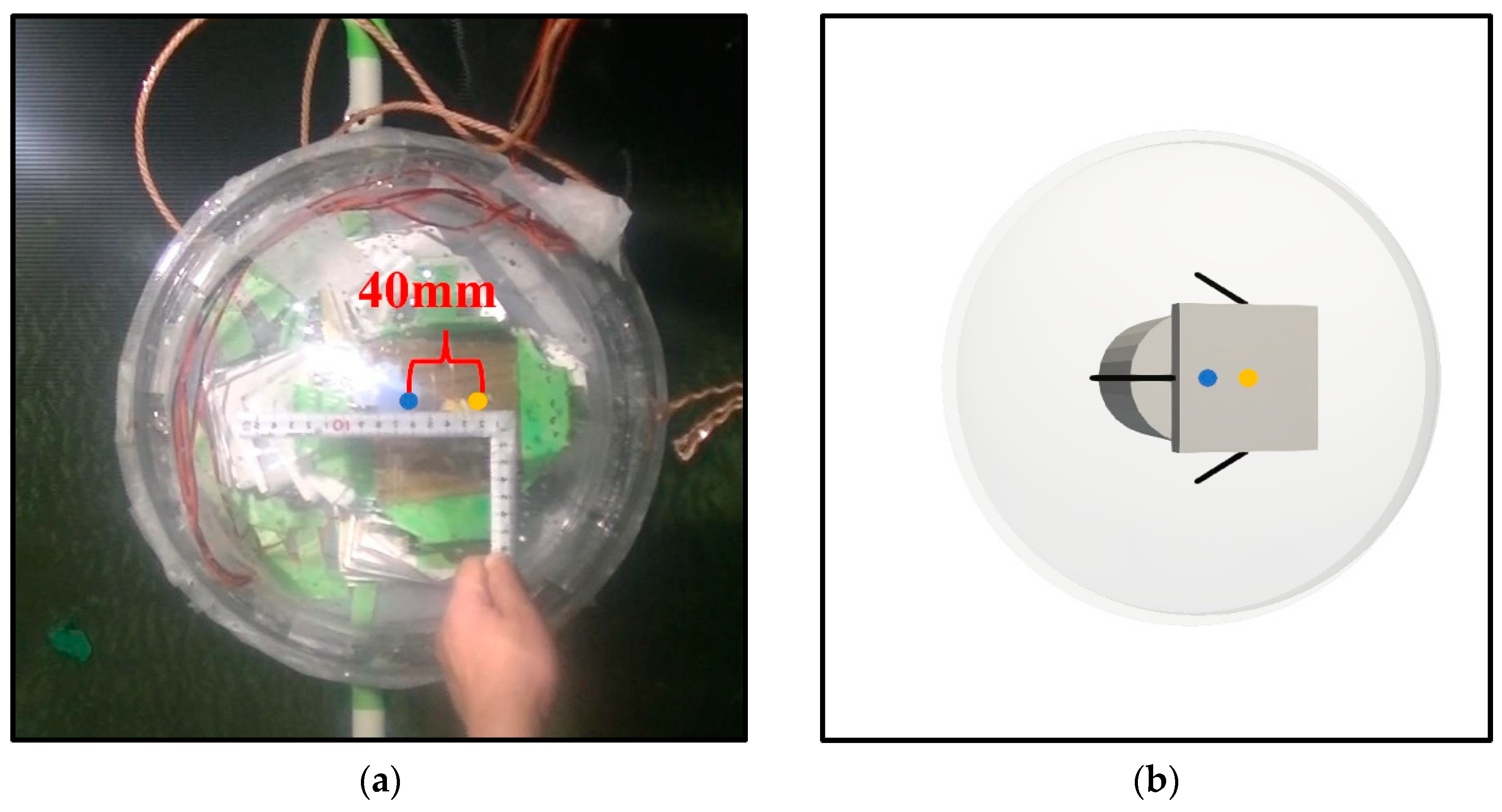
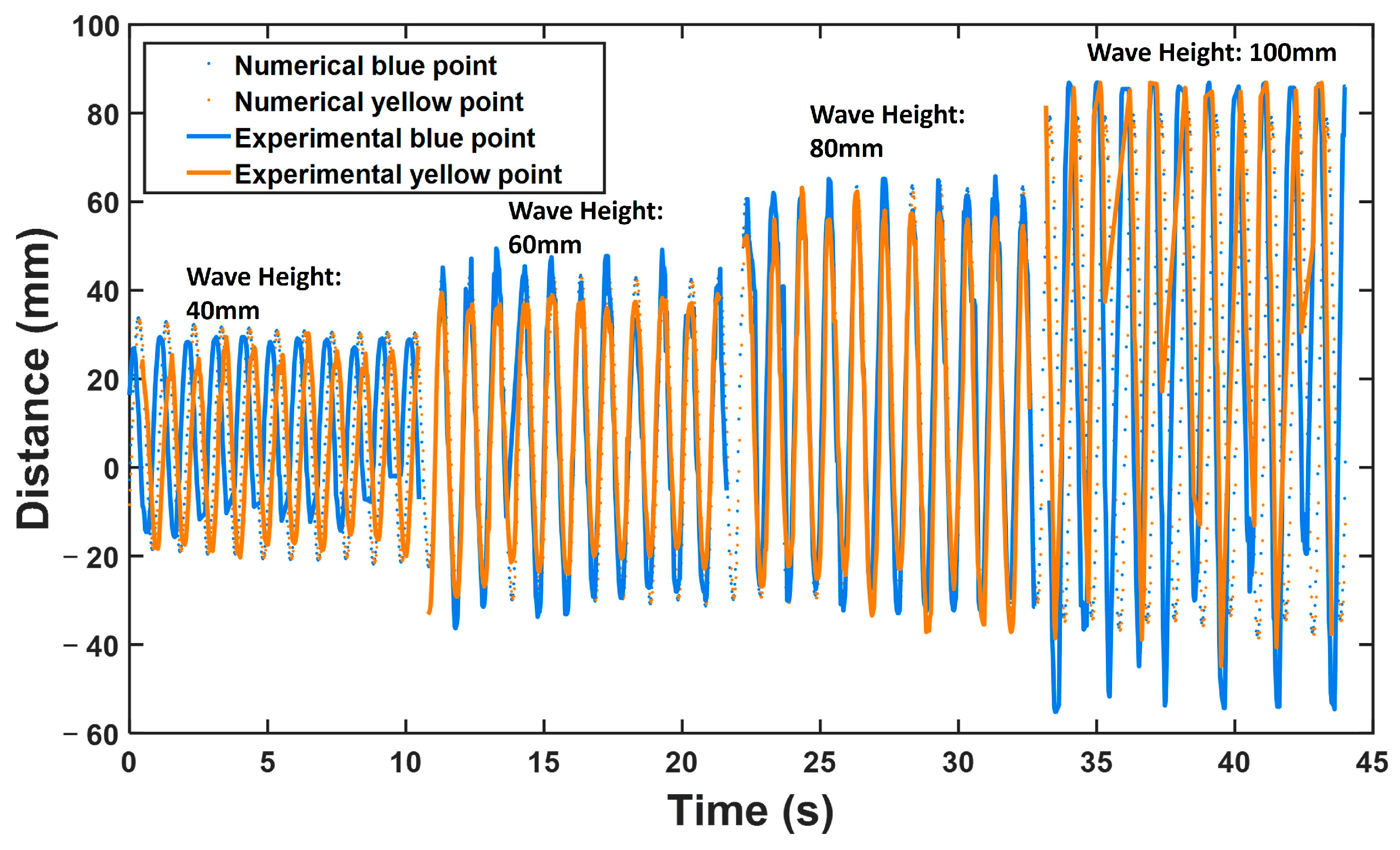
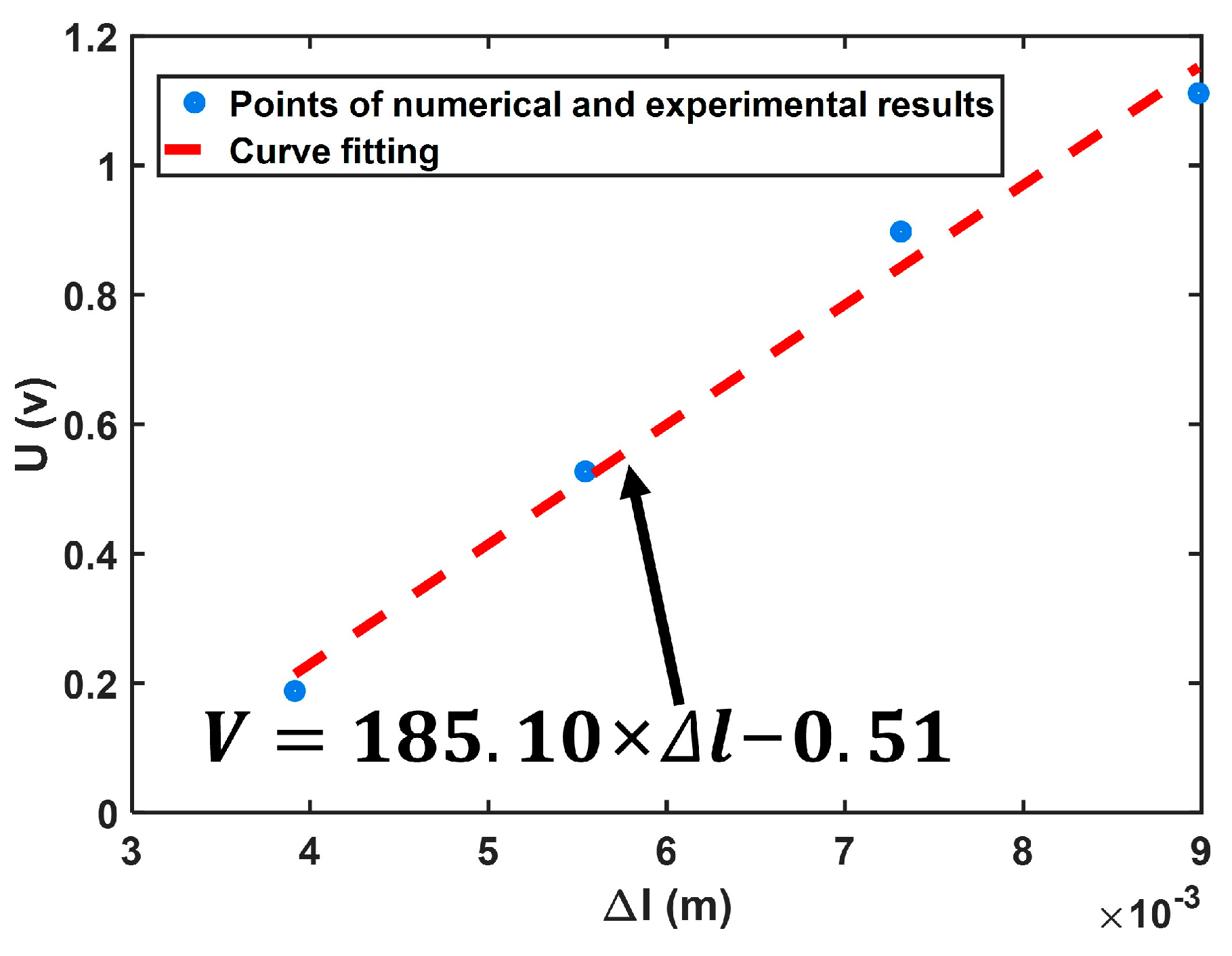
4.4. Validation of Numerical Model
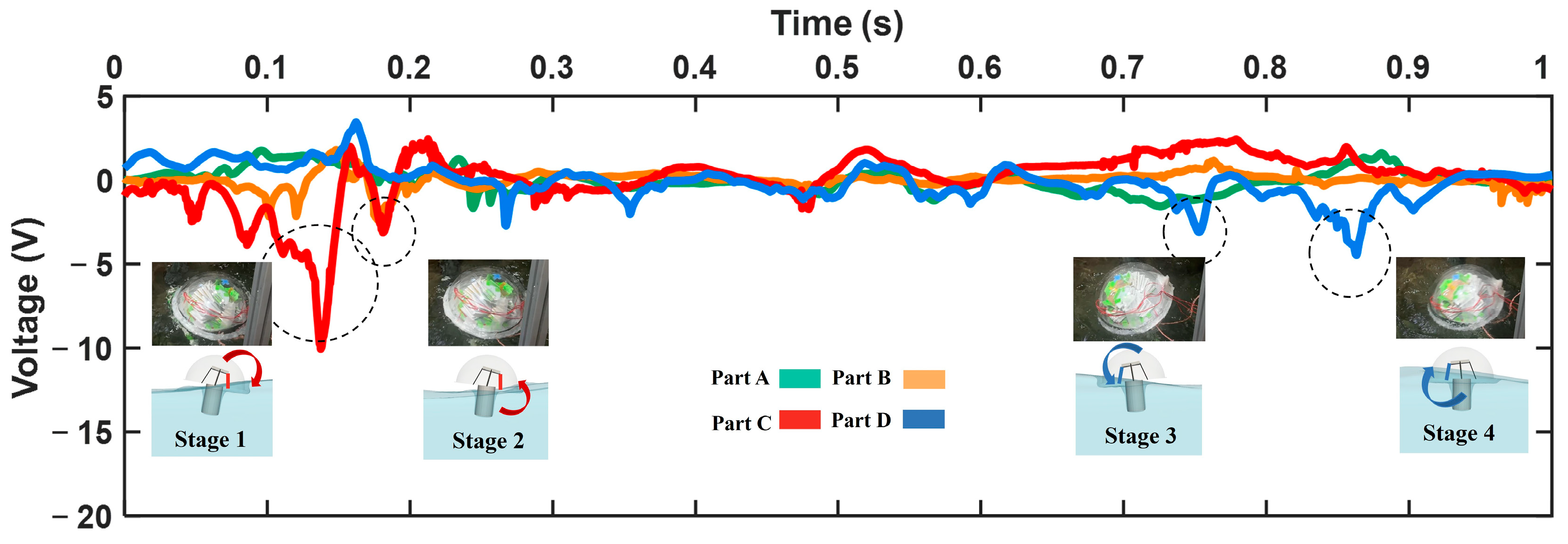
4.5. Experimental Results and Discussion
5. Numerical Simulation in Multidirectional Circular Wave Tank
5.1. Introduction of Numerical Multidirectional Circular Wave Tank
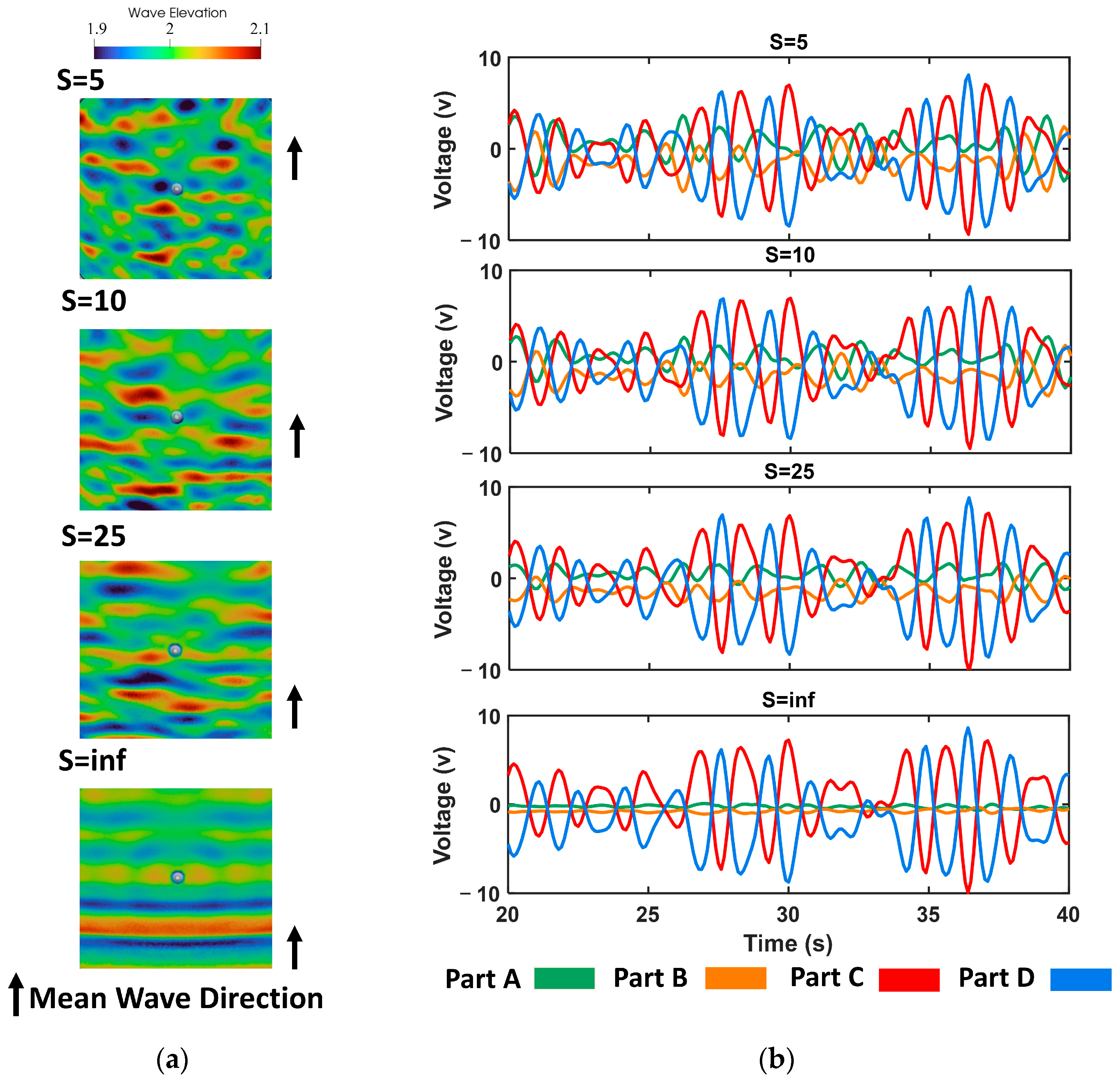
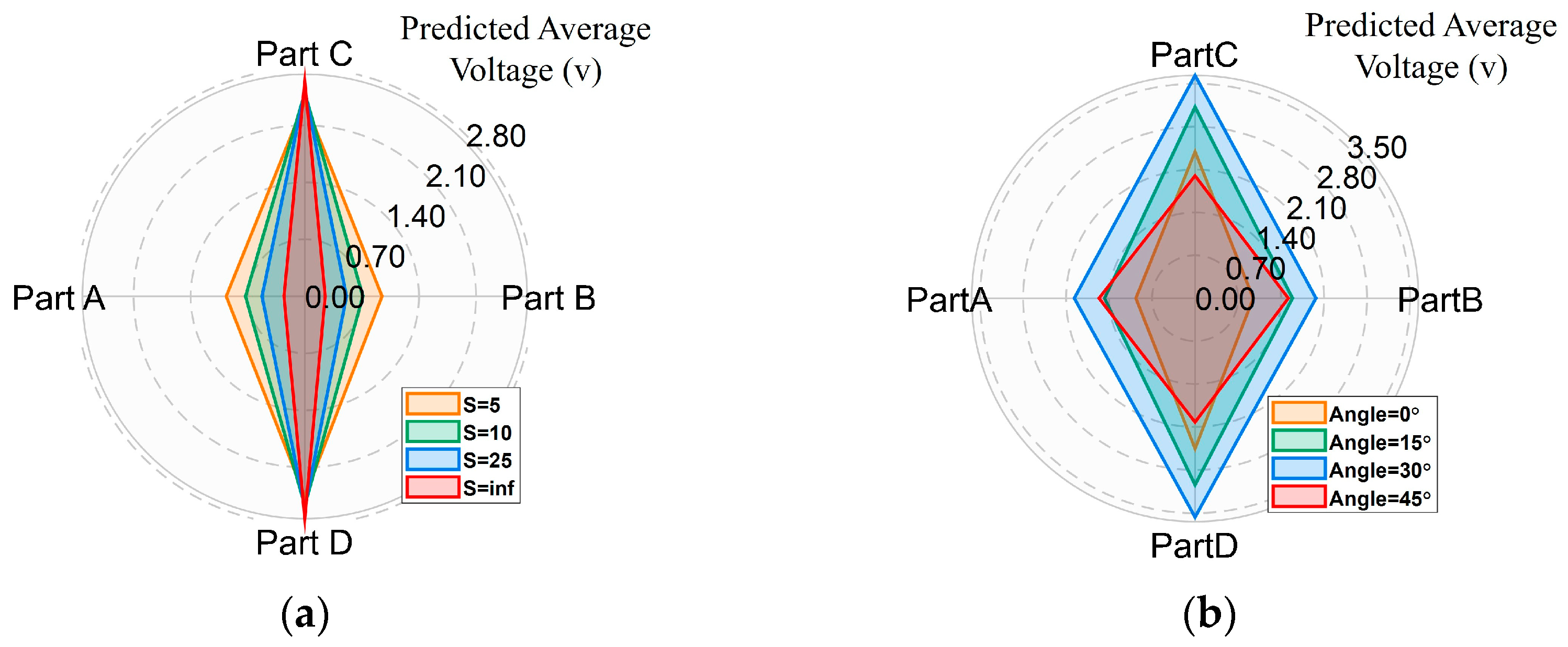
5.2. Numerical Results in Sensing Wave Directions and Parameters
6. Conclusions
- ➢
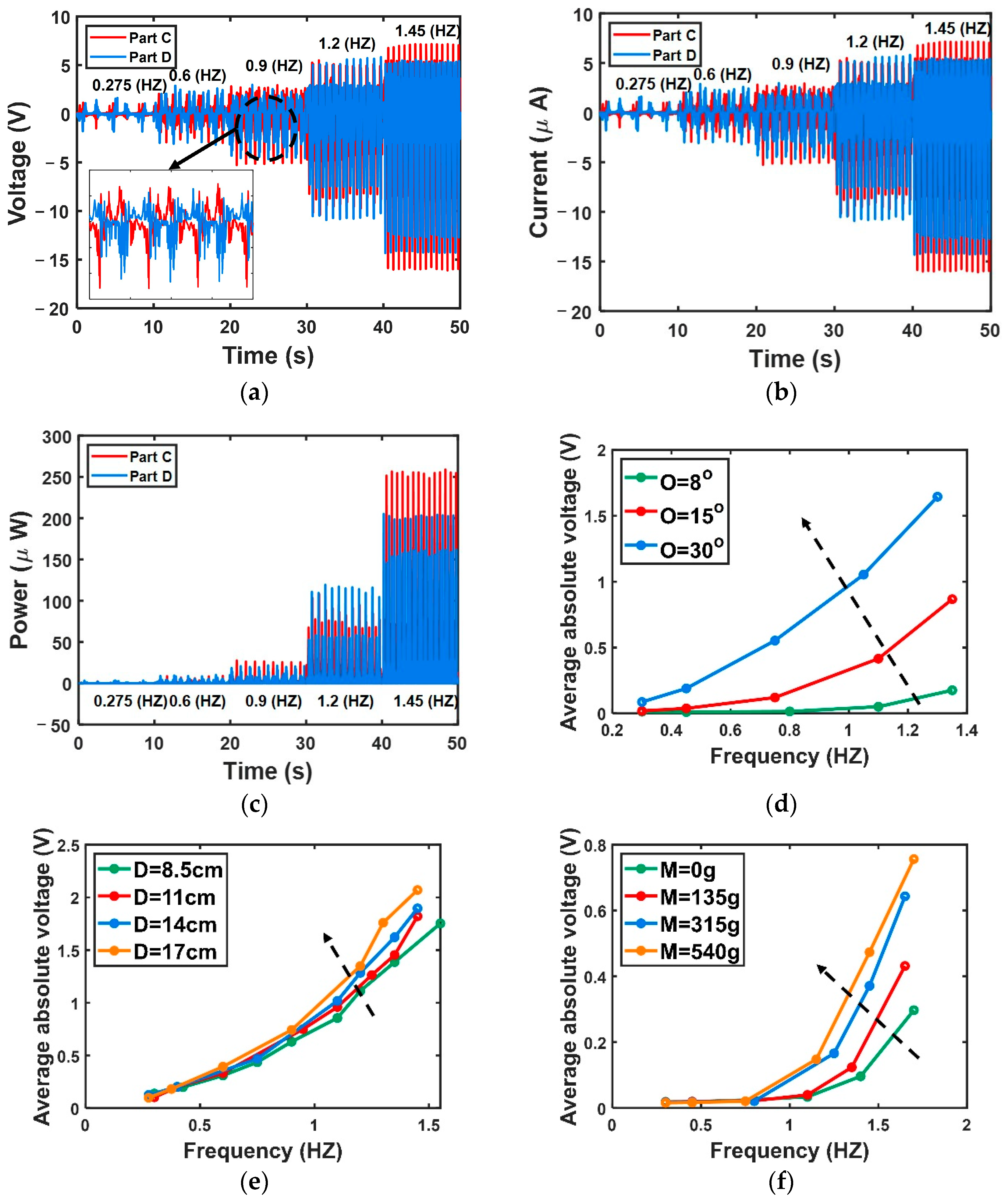
- From the perspective of the internal inertia and overall centroid of gravity, three structural parameters, the weight of magnet mass, the height of the hammer, and the length of the external swing arm, are found to increase the average voltage generation by 33%, 62%, and 50%, respectively.
- ➢
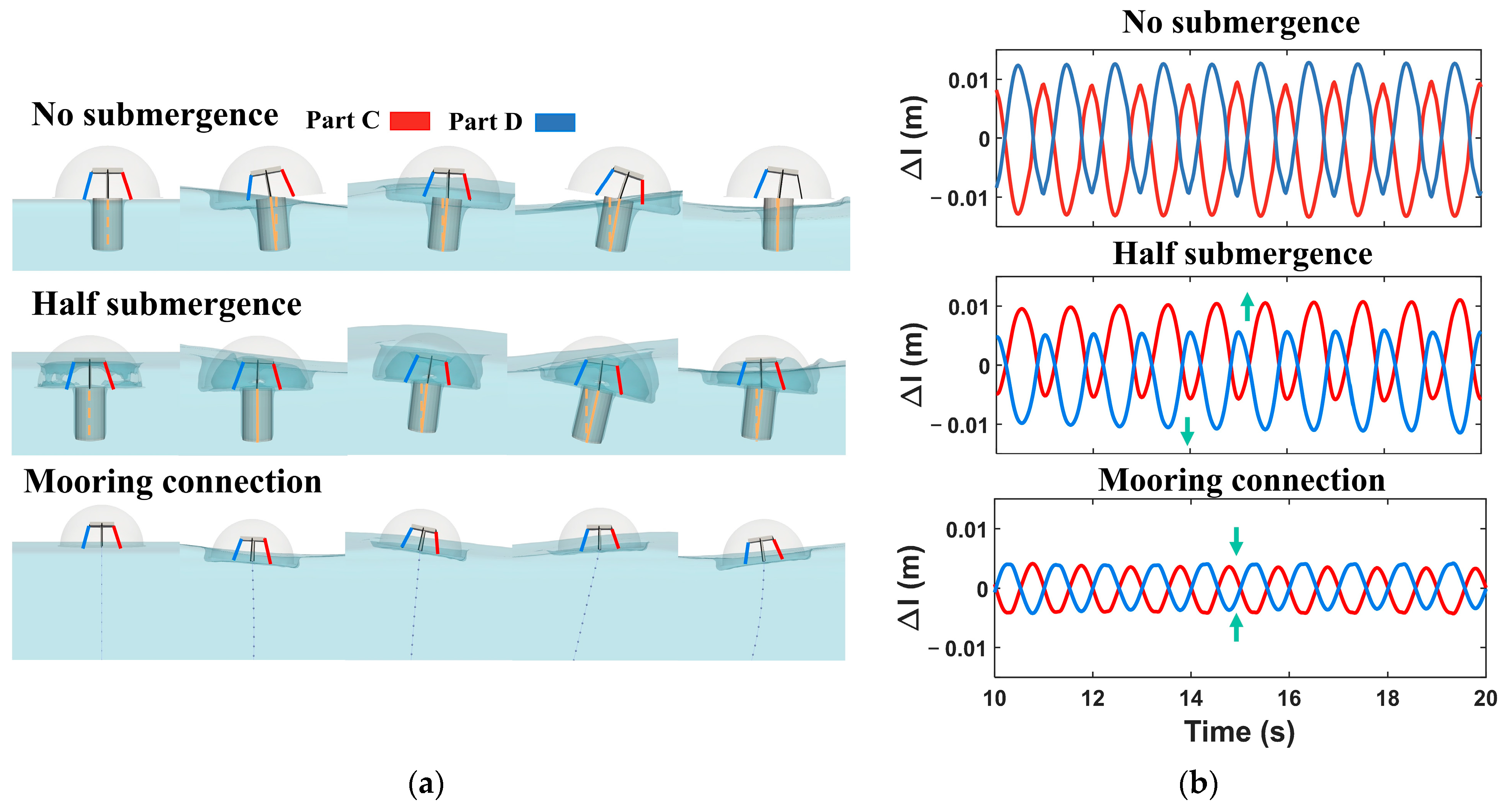
- The no submergence condition that fully compresses and stretches SO-TENGs is selected from three fixed conditions through a numerical model comparison analysis.
- ➢
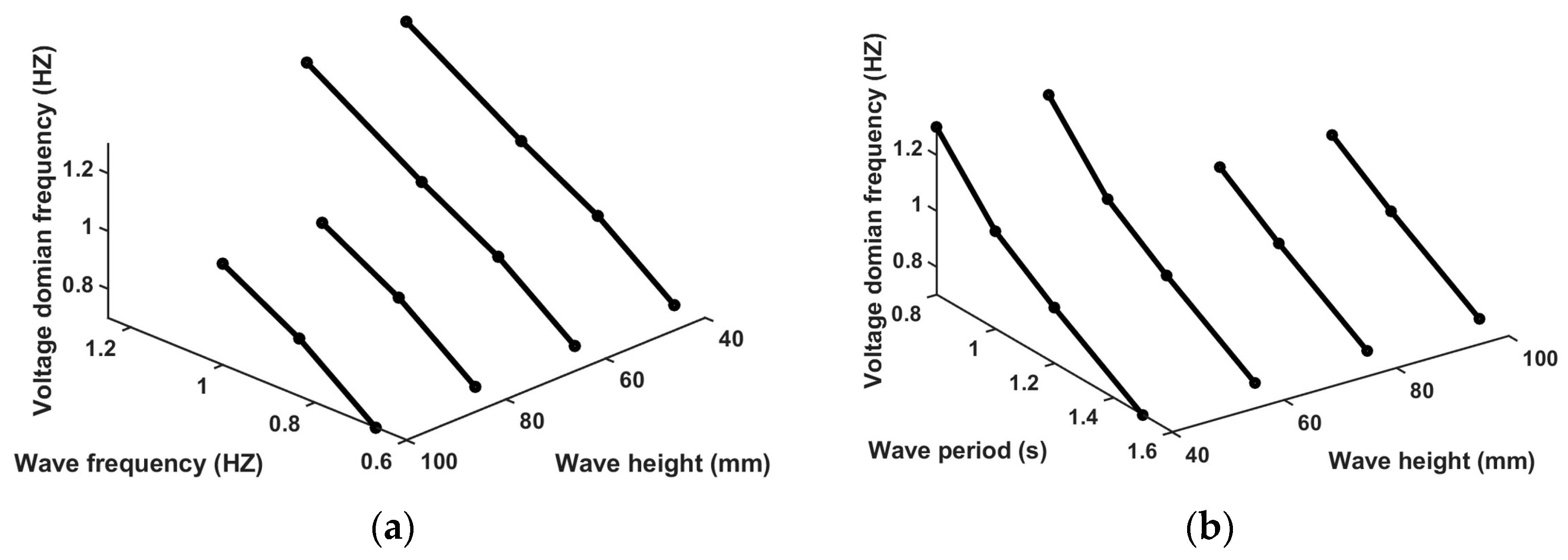
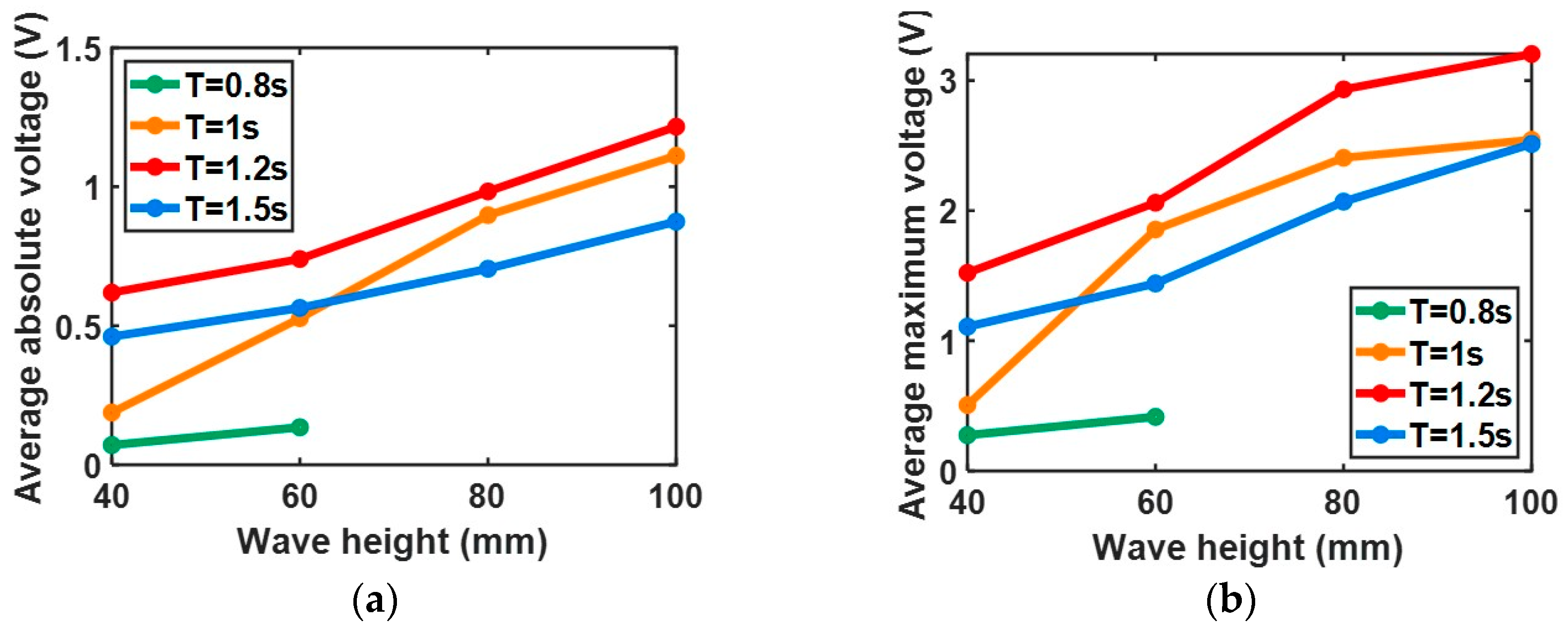
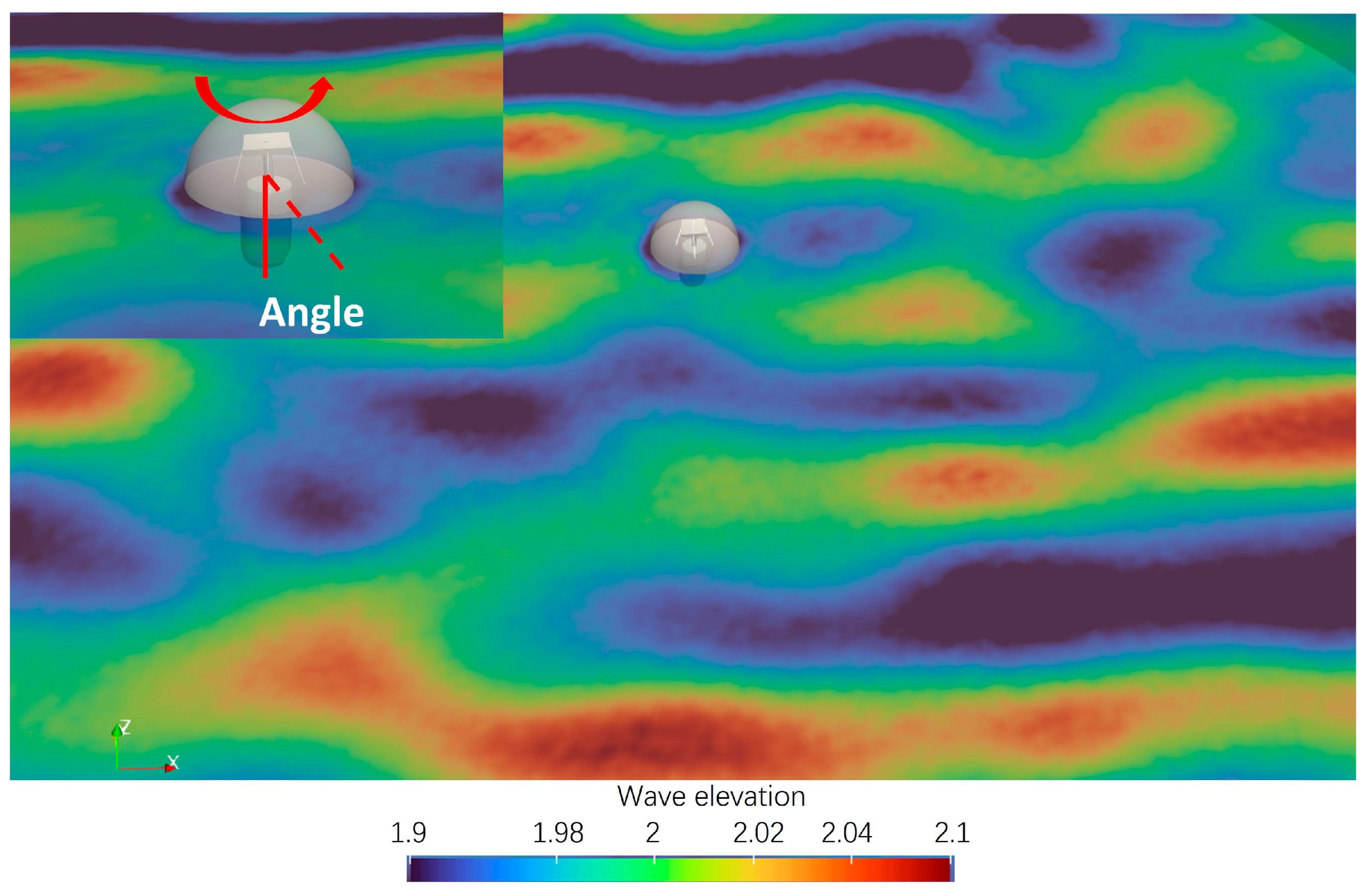
- The optimized HSO-TENG under large-scale wave tank experiments and a numerical circular wave tank exhibits a good response to the wave height, wave period, wave frequency, direction, and wave spreading parameters based on the output voltage.
- ➢
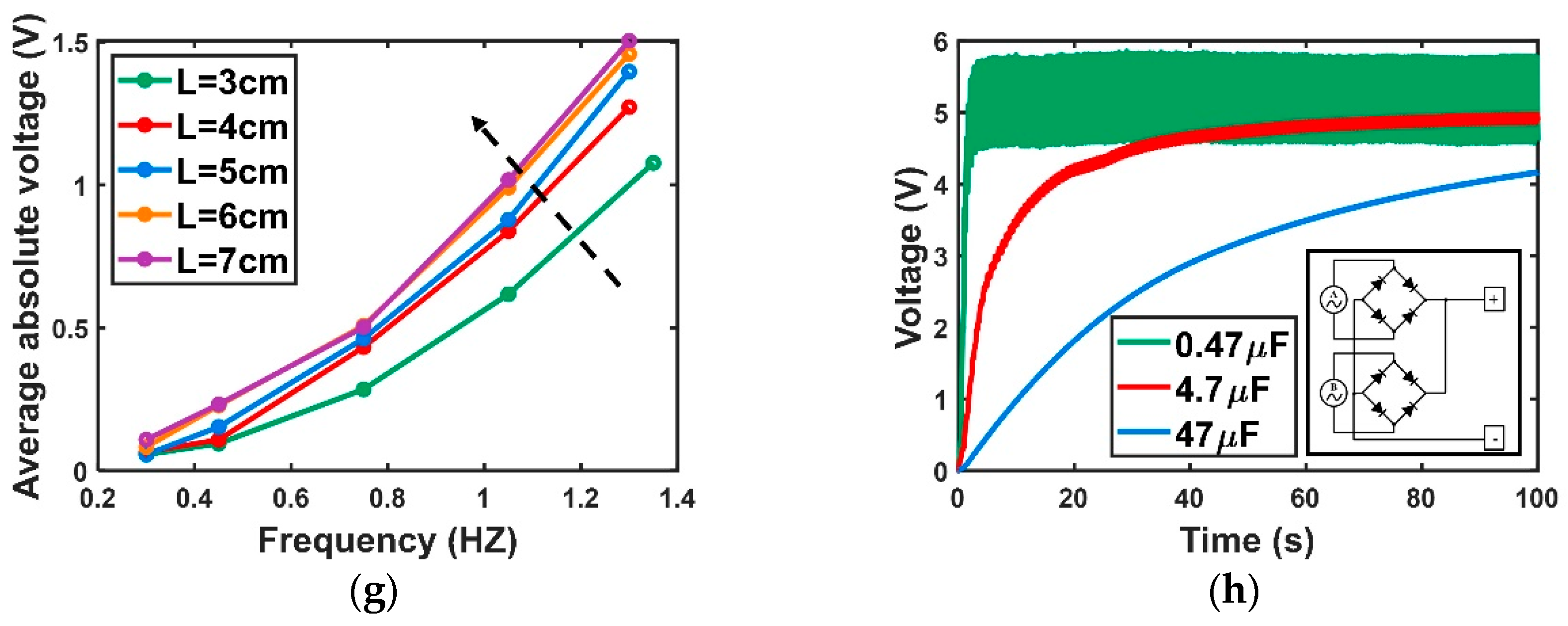
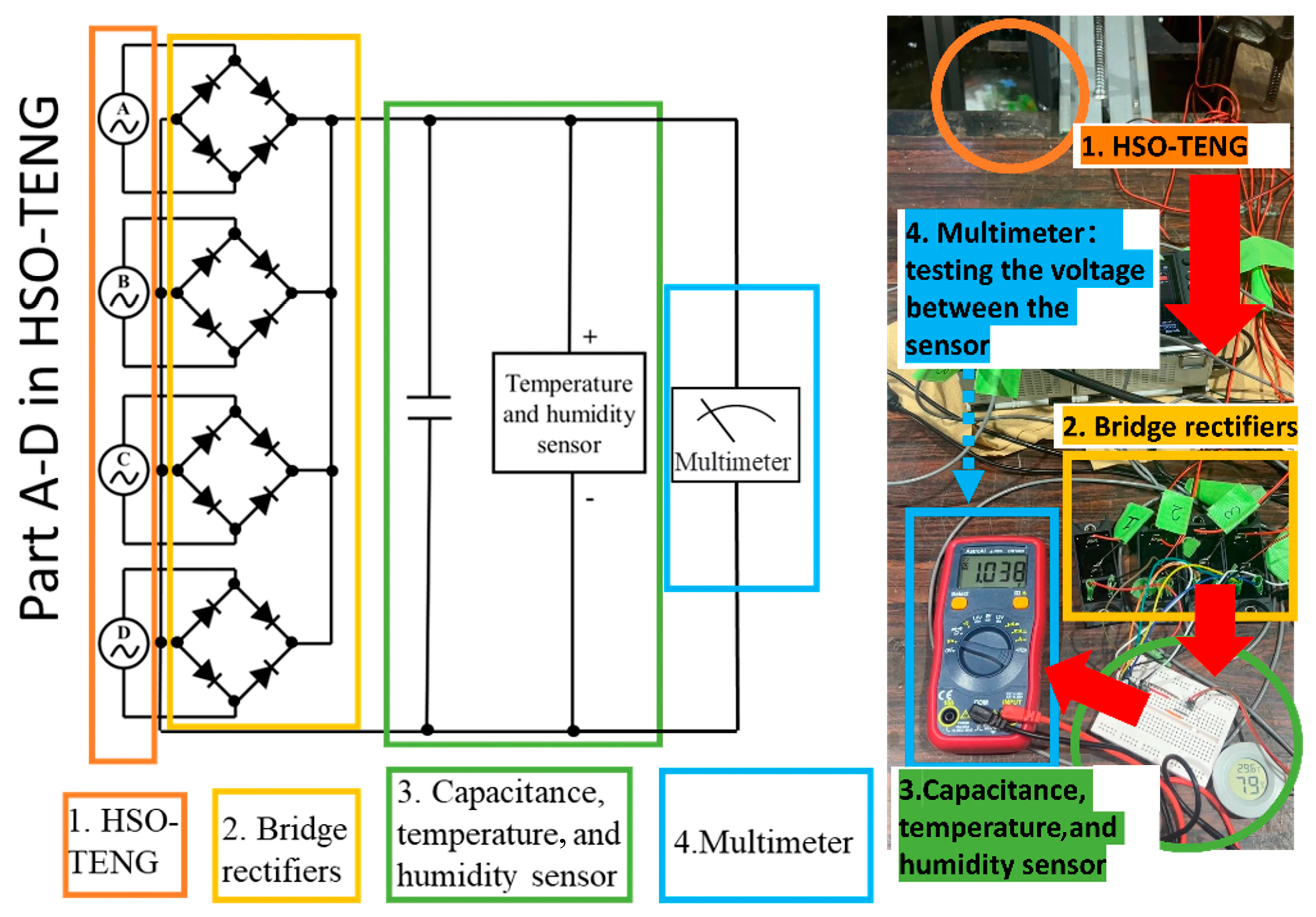
- The maximum voltage can reach 15 V. When the four SO-TENGs are connected in parallel, the output voltage can continually supply power to a temperature and humidity sensor.
- ➢
- The SPH method can simulate the motion of HSO-TENGs and similar wave energy harvesting devices, thereby guiding device design and predicting performance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McGranahan, G.; Balk, D.; Anderson, B. The rising tide: Assessing the risks of climate change and human settlements in low elevation coastal zones. Environ. Urban. 2007, 19, 17–37. [Google Scholar] [CrossRef]
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Ramos, A.; Rouboa, A. Life cycle thinking of plasma gasification as a waste-to-energy tool: Review on environmental, economic and social aspects. Renew. Sustain. Energy Rev. 2022, 153, 111762. [Google Scholar] [CrossRef]
- Small, C.; Nicholls, R.J. A global analysis of human settlement in coastal zones. J. Coast. Res. 2003, 19, 584–599. [Google Scholar]
- Bergsma, E.W.; Almar, R.; Anthony, E.J.; Garlan, T.; Kestenare, E. Wave variability along the world’s continental shelves and coasts: Monitoring opportunities from satellite Earth observation. Adv. Space Res. 2022, 69, 3236–3244. [Google Scholar] [CrossRef]
- Momber, A.; Wilms, M.; Brün, D. The use of meteorological and oceanographic sensor data in the German offshore territory for the corrosion monitoring of marine structures. Ocean Eng. 2022, 257, 110994. [Google Scholar] [CrossRef]
- Cao, H.; Wu, X.; Wu, H.; Pan, Y.; Luo, D.; Azam, A.; Zhang, Z. A hybrid self-powered system based on wind energy harvesting for low-power sensors on canyon bridges. Int. J. Precis. Eng. Manuf.-Green Technol. 2023, 10, 167–192. [Google Scholar] [CrossRef]
- Cao, H.; Zeng, X.; Wu, L.; Wu, X.; Zhang, Z. A hybrid wind and rainwater energy harvesting system for applications in sea-crossing bridges. Ocean Eng. 2021, 234, 109267. [Google Scholar] [CrossRef]
- Xu, G.; Shi, Y.; Sun, X.; Shen, W. Internet of things in marine environment monitoring: A review. Sensors 2019, 19, 1711. [Google Scholar] [CrossRef]
- Yang, H.; Liang, X.; Kan, J.; Wang, Z.L.; Jiang, T.; Hong, Z. Triboelectric nanogenerator integrated with a simple controlled switch for regularized water wave energy harvesting. Nano Res. 2024, 1–8. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Zhao, D.; Gao, Q.; Li, X.; Wang, J.; Wang, Z.L.; Cheng, T. Material’s selection rules for high performance triboelectric nanogenerators. Mater. Today 2023, 64, 61–71. [Google Scholar] [CrossRef]
- Zhang, B.; Gao, Q.; Li, W.; Zhu, M.; Li, H.; Cheng, T.; Wang, Z.L. Alternating Magnetic Field-Enhanced Triboelectric Nanogenerator for Low-Speed Flow Energy Harvesting. Adv. Funct. Mater. 2023, 33, 2304839. [Google Scholar] [CrossRef]
- Ni, W.; Tian, G.; Yang, C.; Yang, W.; Ma, Y.; Xu, L. Simultaneous energy utilization and vibration suppression study of a rolling-structured triboelectric nanogenerator for the vortex-induced vibration of a cylinder. Ocean Eng. 2023, 288, 115976. [Google Scholar] [CrossRef]
- Wardhana, E.M.; Mutsuda, H.; Tanaka, Y.; Nakashima, T.; Kanehira, T.; Maeda, S.; Yamauchi, M. Characteristics of electric performance and key factors of a hybrid piezo/triboelectric generator for wave energy harvesting. Sustain. Energy Technol. Assess. 2022, 50, 101757. [Google Scholar] [CrossRef]
- Wardhana, E.M.; Mutsuda, H.; Tanaka, Y.; Nakashima, T.; Kanehira, T.; Taniguchi, N.; Maeda, S.; Yonezawa, T.; Yamauchi, M. Harvesting contact-separation-compression vibrations using a flexible and compressible triboelectric generator. Sustain. Energy Technol. Assess. 2020, 42, 100869. [Google Scholar] [CrossRef]
- Wang, X.; Hu, Y.; Li, J.; Ma, J.; Wan, N.; Wen, J.; Cheng, T. A double-float structured triboelectric nanogenerator for wave hydrological monitoring. Sustain. Energy Technol. Assess. 2022, 54, 102824. [Google Scholar] [CrossRef]
- Jiao, P.; Nazar, A.M.; Egbe, K.J.I.; Rayegani, A. Magnetically circular layers triboelectric nanogenerators (MCL-TENG) for velocity sensing and damage detection. Sustain. Energy Technol. Assess. 2022, 53, 102644. [Google Scholar] [CrossRef]
- Ji, J.; Luo, Q.; Ye, K. Vibration control based metamaterials and origami structures: A state-of-the-art review. Mech. Syst. Signal Process. 2021, 161, 107945. [Google Scholar] [CrossRef]
- Huang, C.; Tan, T.; Wang, Z.; Zhang, S.; Yang, F.; Lin, Z.; Yan, Z. Origami dynamics based soft piezoelectric energy harvester for machine learning assisted self-powered gait biometric identification. Energy Convers. Manag. 2022, 263, 115720. [Google Scholar] [CrossRef]
- Lu, D.; Liu, T.; Meng, X.; Luo, B.; Yuan, J.; Liu, Y.; Zhang, S.; Cai, C.; Gao, C.; Wang, J.; et al. Wearable triboelectric visual sensors for tactile perception. Adv. Mater. 2023, 35, 2209117. [Google Scholar] [CrossRef]
- Tao, K.; Yi, H.; Yang, Y.; Tang, L.; Yang, Z.; Wu, J.; Chang, H.; Yuan, W. Miura-origami-inspired electret/triboelectric power generator for wearable energy harvesting with water-proof capability. Microsyst. Nanoeng. 2020, 6, 56. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Zhu, X.; Yu, Y.; Liu, S.; Chen, Y.; Feng, Y. Waterbomb-origami inspired triboelectric nanogenerator for smart pavement-integrated traffic monitoring. Nano Res. 2022, 15, 5450–5460. [Google Scholar] [CrossRef]
- Tao, K.; Yi, H.; Yang, Y.; Chang, H.; Wu, J.; Tang, L.; Yang, Z.; Wang, N.; Hu, L.; Fu, Y.; et al. Origami-inspired electret-based triboelectric generator for biomechanical and ocean wave energy harvesting. Nano Energy 2020, 67, 104197. [Google Scholar] [CrossRef]
- Xia, K.; Liu, J.; Li, W.; Jiao, P.; He, Z.; Wei, Y.; Qu, F.; Xu, Z.; Wang, L.; Ren, X.; et al. A self-powered bridge health monitoring system driven by elastic origami triboelectric nanogenerator. Nano Energy 2023, 105, 107974. [Google Scholar] [CrossRef]
- Gonçalves, I.; Rodrigues, C.; Ventura, J. Sea State Adaptation Enhances Power Output of Triboelectric Nanogenerators for Tailored Ocean Wave Energy Harvesting. Adv. Energy Mater. 2024, 14, 2302627. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, C.; Du, Z.; Tu, Y.; Dai, X.; Huang, Y.; Fan, J.; Hong, Z.; Jiang, T.; Wang, Z.L. Fluid Oscillation-Driven Bi-Directional Air Turbine Triboelectric Nanogenerator for Ocean Wave Energy Harvesting. Adv. Energy Mater. 2024, 14, 2304184. [Google Scholar] [CrossRef]
- Gao, Q.; Xu, Y.; Yu, X.; Jing, Z.; Cheng, T.; Wang, Z.L. Gyroscope-structured triboelectric nanogenerator for harvesting multidirectional ocean wave energy. ACS Nano 2022, 16, 6781–6788. [Google Scholar] [CrossRef]
- Han, J.; Liu, Y.; Feng, Y.; Jiang, T.; Wang, Z.L. Achieving a Large Driving Force on Triboelectric Nanogenerator by Wave-Driven Linkage Mechanism for Harvesting Blue Energy toward Marine Environment Monitoring. Adv. Energy Mater. 2023, 13, 2203219. [Google Scholar] [CrossRef]
- Rui, P.; Zhang, W.; Zhong, Y.; Wei, X.; Guo, Y.; Shi, S.; Liao, Y.; Cheng, J.; Wang, P. High-performance cylindrical pendulum shaped triboelectric nanogenerators driven by water wave energy for full-automatic and self-powered wireless hydrological monitoring system. Nano Energy 2020, 74, 104937. [Google Scholar] [CrossRef]
- Blanke, M.; Jensen, A.G. Dynamic properties of a container vessel with low metacentric height. Trans. Inst. Meas. Control 1997, 19, 78–93. [Google Scholar] [CrossRef]
- Du, X.; Mutsuda, H.; Tanaka, Y.; Nakashima, T.; Kanehira, T.; Taniguchi, N.; Moriyama, Y. Experimental and numerical studies on working parameter selections of a piezoelectric-painted-based ocean energy harvester attached to fish aggregating devices. Energy Sustain. Dev. 2022, 71, 73–88. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, L.; Zhang, Z.; Han, J.; Chen, P.; Hong, Z.; Jiang, T.; Wang, Z.L. Durable Roller-Based Swing-Structured Triboelectric Nanogenerator for Water Wave Energy Harvesting. Small 2023, 20, 2307288. [Google Scholar] [CrossRef] [PubMed]
- Bhatta, T.; Maharjan, P.; Shrestha, K.; Lee, S.; Salauddin, M.; Rahman, M.T.; Rana, S.S.; Sharma, S.; Park, C.; Yoon, S.H.; et al. A Hybrid Self-Powered Arbitrary Wave Motion Sensing System for Real-Time Wireless Marine Environment Monitoring Application. Adv. Energy Mater. 2022, 12, 2102460. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, L.; Zhou, L.; Yin, X.; Wei, X.; Hu, Y.; Liu, Y.; Chen, S.; Wang, J.; Wang, Z.L. Self-powered sensor for quantifying ocean surface water waves based on triboelectric nanogenerator. Acs Nano 2020, 14, 7092–7100. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Goyal, A.K.; Massoud, Y. Performance optimization of contact-separation mode triboelectric nanogenerator using dielectric nanograting. Results Eng. 2024, 22, 102108. [Google Scholar] [CrossRef]
- Kumar, R.; Goyal, A.K.; Massoud, Y. Development of flexible high-performance PDMS-based triboelectric nanogenerator using nanogratings. J. Colloid Interface Sci. 2024, 669, 458–465. [Google Scholar] [CrossRef] [PubMed]
- Du, X.; Mutsuda, H.; Wasada, Y.; Nakashima, T. Hybrid simulation of dissipative particle dynamics and computational fluid dynamics for friction drag reduction of polymer coatings. Ocean Eng. 2023, 285, 115415. [Google Scholar] [CrossRef]
- Lu, S.; Cheng, X.; Liu, J.; Li, S.; Yasukawa, H. Maneuvering modeling of a twin-propeller twin-rudder inland container vessel based on integrated CFD and empirical methods. Appl. Ocean Res. 2022, 126, 103261. [Google Scholar] [CrossRef]
- Lu, S.; Liu, J.; Hekkenberg, R. Mesh Properties for RANS Simulations of Airfoil-Shaped Profiles: A Case Study of Rudder Hydrodynamics. J. Mar. Sci. Eng. 2021, 9, 1062. [Google Scholar] [CrossRef]
- Wang, Y.; Pham, A.T.T.; Han, X.; Du, D.; Tang, Y. Design and evaluate the wave driven-triboelectric nanogenerator under external wave parameters: Experiment and simulation. Nano Energy 2022, 93, 106844. [Google Scholar] [CrossRef]
- Yan, Y.; Zhu, J.; Zhang, Y.; Wang, Z.; Jiang, L.; Wang, Z.L.; Zhu, J.; Cheng, T. Triboelectric-electromagnetic hybrid generator with swing-blade structures for effectively harvesting distributed wind energy in urban environments. Nano Res. 2023, 16, 11621–11629. [Google Scholar] [CrossRef]
- Zhu, M.; Zhang, J.; Wang, Z.; Yu, X.; Zhang, Y.; Zhu, J.; Wang, Z.L.; Cheng, T. Double-blade structured triboelectric–electromagnetic hybrid generator with aerodynamic enhancement for breeze energy harvesting. Appl. Energy 2022, 326, 119970. [Google Scholar] [CrossRef]
- Han, X.; Dong, S. Interaction of solitary wave with submerged breakwater by smoothed particle hydrodynamics. Ocean Eng. 2020, 216, 108108. [Google Scholar] [CrossRef]
- Kanehira, T.; Mutsuda, H.; Draycott, S.; Taniguchi, N.; Nakashima, T.; Doi, Y.; Ingram, D. Numerical re-creation of multi-directional waves in a circular basin using a particle based method. Ocean Eng. 2020, 209, 107446. [Google Scholar] [CrossRef]
- Quartier, N.; Ropero-Giralda, P.; Domínguez, J.M.; Stratigaki, V.; Troch, P. Influence of the drag force on the average absorbed power of heaving wave energy converters using smoothed particle hydrodynamics. Water 2021, 13, 384. [Google Scholar] [CrossRef]
- Shadloo, M.S.; Oger, G.; Le Touzé, D. Smoothed particle hydrodynamics method for fluid flows, towards industrial applications: Motivations, current state, and challenges. Comput. Fluids 2016, 136, 11–34. [Google Scholar] [CrossRef]
- Marrone, S.; Colagrossi, A.; Baudry, V.; Le Touzé, D. Extreme wave impacts on a wave energy converter: Load prediction through a SPH model. Coast. Eng. J. 2019, 61, 63–77. [Google Scholar] [CrossRef]
- Quartier, N.; Crespo, A.J.; Domínguez, J.M.; Stratigaki, V.; Troch, P. Efficient response of an onshore Oscillating Water Column Wave Energy Converter using a one-phase SPH model coupled with a multiphysics library. Appl. Ocean Res. 2021, 115, 102856. [Google Scholar] [CrossRef]
- Yoneda, T.; Matsumoto, D.; Wada, H. Structure, design, and mechanics of a paper spring. Phys. Rev. E 2019, 100, 013003. [Google Scholar] [CrossRef]
- Niu, S.; Wang, S.; Lin, L.; Liu, Y.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theoretical study of contact-mode triboelectric nanogenerators as an effective power source. Energy Environ. Sci. 2013, 6, 3576–3583. [Google Scholar] [CrossRef]
- Domínguez, J.M.; Fourtakas, G.; Altomare, C.; Canelas, R.B.; Tafuni, A.; García-Feal, O.; Martínez-Estévez, I.; Mokos, A.; Vacondio, R.; Crespo, A.J.; et al. DualSPHysics: From fluid dynamics to multiphysics problems. Comput. Part. Mech. 2022, 9, 867–895. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions | 43 m × 1.2 m × 2.0 m (length × breadth × water depth) |
| Wave period | 0.8 s, 1 s, 1.2 s, and 1.5 s |
| Wave height | 40, 60, 80, and 100 mm |
| Driving motor | 6.17 KW × 1 |
| Scale parameters | Distance of particles | 0.01 m |
| Number of particles | 4,309,646 | |
| Time of simulation | 15 s | |
| Time step | 0.025 s | |
| Tank depth | 0.78 m | |
| Tank width | 1.2 m | |
| Tank length | 4.61 m | |
| Length of damping zone | 0.78 m | |
| Diameter of the HSO-TENG | 0.37 m | |
| Wave parameters | Wave height | 40 mm, 60 mm, 80 mm, and 100 m |
| Wave period | 1 s |
| Scale parameters | Distance of particles | 0.07 m |
| Number of particles | 3,278,609 | |
| Time of simulation | 40 s | |
| Time step | 0.1 s | |
| Diameter of the circular wave tank | 25 m | |
| Tank depth | 2 m | |
| Diameter of the HSO-TENG | 1.11 m | |
| Wave parameters | Number of wave makers | 168 |
| Wave period | 1.5 s | |
| Wave height | 0.05 m | |
| Spreading parameters (s) | 5, 10, 25 and infinite (inf) | |
| Wave direction angles | 0, 15, 30 and 45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Zhang, H.; Cao, H.; Hao, Z.; Nakashima, T.; Tanaka, Y.; Jiao, P.; Mutsuda, H. Double-Swing Spring Origami Triboelectric Nanogenerators for Self-Powered Ocean Monitoring. Energies 2024, 17, 2981. https://doi.org/10.3390/en17122981
Du X, Zhang H, Cao H, Hao Z, Nakashima T, Tanaka Y, Jiao P, Mutsuda H. Double-Swing Spring Origami Triboelectric Nanogenerators for Self-Powered Ocean Monitoring. Energies. 2024; 17(12):2981. https://doi.org/10.3390/en17122981
Chicago/Turabian StyleDu, Xinru, Hao Zhang, Hao Cao, Zewei Hao, Takuji Nakashima, Yoshikazu Tanaka, Pengcheng Jiao, and Hidemi Mutsuda. 2024. "Double-Swing Spring Origami Triboelectric Nanogenerators for Self-Powered Ocean Monitoring" Energies 17, no. 12: 2981. https://doi.org/10.3390/en17122981
APA StyleDu, X., Zhang, H., Cao, H., Hao, Z., Nakashima, T., Tanaka, Y., Jiao, P., & Mutsuda, H. (2024). Double-Swing Spring Origami Triboelectric Nanogenerators for Self-Powered Ocean Monitoring. Energies, 17(12), 2981. https://doi.org/10.3390/en17122981