1. Introduction
Gas–oil–water three-phase flows in pipes commonly exist in the oil and gas industry as oil fields are becoming mature and water production is becoming inevitable. The slug flow is one of the most common gas–liquid–liquid flow patterns occurring in the field [
1]. While studies on multiphase flows in pipes have been ongoing for decades, most previous studies focused on gas–liquid or oil–water two-phase flows, and studies on gas–liquid–liquid flows are still limited. The oil–water flow pattern in a gas–oil–water flow is less predictable and can be influenced by many factors, due to their closer fluid properties and lower interfacial tension. In addition to the flowing conditions, such as flow rates, pipe inclinations and diameter, and fluid density and viscosity, agitation from piping components such as restrictions can also impact the flow pattern, especially for oil and water flow. There are many different types of restrictions in the oil and gas industry, such as valves, chokes, regulators, multiphase flow meters, reducers, etc. These restrictions are extensively employed in the field, to regulate flow rates or pressure in order to fulfill facility needs, ensure secure transportation, or generate more turbulence for flow measurement.
Previous studies on the effects of restriction (or expansion) on fluid flow have been mainly focused on gas–liquid flow, such as [
2,
3,
4,
5,
6], or oil–water flow, such as [
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. Some studies used computational fluid dynamics to study the oil–water flow through restrictions, such as [
17]. While some studies have demonstrated that the oil–water flow pattern could impact the corresponding pressure gradient in the pipe for the oil–water flow, such as [
7], most of them focused on droplet breakup mechanisms or droplet sizes, such as [
10,
11,
12,
13,
14,
15,
16]. Studies on gas–oil–water three-phase flow downstream of restrictions are still very limited.
To better understand how the oil–water flow pattern in gas–oil–water three-phase flow impacts the pressure gradient, we conducted an experimental study in a 13.7 m horizontal pipe, with a 5.25 cm inner diameter. A ball valve was installed near the beginning of the test section. The detailed experimental results are discussed in [
18]. In this work, we develop a new modeling approach to predict the pressure gradient for a gas–liquid–liquid three-phase slug flow downstream of restrictions, with a focus on the flow pattern where the oil and water phases are partially mixed.
Before diving into the model development, we highlight some experimental observations that demonstrated the restrictions’ effect on the oil–water flow pattern in the three-phase slug flow, and their impacts on the pressure gradient, in the following section.
Modeling studies on three-phase flow are scarce, due to limited experimental studies on three-phase flow in pipes. Most previous three-phase flow mechanistic modeling studies were developed for a stratified flow in which gas, oil, and water flow separately, such as [
1,
19,
20,
21,
22,
23]. The model used the momentum equations for all three phases, coupled with various closure relationships, including the interfacial friction factor correlation, which was the one that impacted the predictions most. Some other models treat the oil and water phases as a mixture, allowing the implementation of gas–liquid two-phase models to three-phase gas–liquid–liquid flow. This implementation enables the models to work for a more complex flow pattern, such as slug flow.
In the literature, there are two main approaches to model three-phase slug flow. One approach involves treating the oil–water mixture as one liquid phase, which effectively simplifies the three-phase problem to a two-phase scenario. This allows the application of two-phase models, such as Dukler and Hubbard’s (1975) model [
24], Taitel and Barnea’s (1990) model [
25], and Zhang et al.’s (2003) unified model [
26]. Hall (1992) [
19] modified the Dukler and Hubbard (1975) [
24] model for three-phase slug flow in horizontal pipelines. He assumed that the liquid phases were fully dispersed at the end of the mixing eddy in the slug body. The volume-averaged density and viscosity calculated using the Brinkman (1952) [
27] equation were suggested to be used for liquid slug pressure gradient calculations. The author derived a formula for the pressure drop associated with the formation of dispersed drops during the eddy mixing and concluded that this pressure drop was negligible. Further, Hall (1992) [
19] argued that it was common that oil and water flowed separately in the film region despite its dispersion state in the slug body. Therefore, the author suggested using the stratified model to solve for the liquid holdup in the film region. Stapelberg and Mewes (1994) [
28] studied gas–liquid–liquid slug flow in horizontal pipes. They assumed that the liquid–liquid phase in the three-phase flow formed a homogeneous mixture and treated it as a single phase. Thus, they were able to use the gas–liquid two-phase slug models proposed by Dukler and Hubbard (1975) [
24] or Nicholson et al. (1978) [
29] to model three-phase slug flow. Dehkordi et al. (2019b) [
30] proposed a model to solve three-phase slug flow based on Zhang et al. (2003) [
26] two-phase unified model for the slug flow. They used the criteria from Zhang et al. (2006) [
31] to determine if the liquid phase could be treated as a homogeneous single phase. In particular, they fitted a new formula for the slug unit length for their model, which reduced the calculation complexity greatly.
The other approach to model a three-phase slug flow in the previous literature is proposed by Zhang and Sarica (2006) [
31], which treats each phase separately. In their model, the film region has three stratified layers, namely gas, oil, and water; and the slug body has two layers, oil and water. The model involves three combined momentum equations—two in the film region and one in the slug body—and four continuity equations. Cohen and Hanratty’s (1968) [
32] interfacial friction factor was employed at the oil and water interface. They comment that the model gave unsatisfactory predictions for the slug flow that has partial mixing between oil and water phases. In their paper, they also proposed a criterion to determine if the oil and water can be treated as a mixture. If they can be treated as a mixture, the two-phase slug flow model can be employed, with the oil and water mixture’s apparent viscosity calculated using Brinkman’s (1952) [
27] correlation. Otherwise, the separate model previously mentioned can be used.
In conclusion, there is still a gap in the current literature to model a slug flow that has partial mixing between the oil and water phases. Furthermore, a model that can capture the effects of the restrictions is also needed. In this paper, we focus on the “semi-dispersed” slug flow that has partial mixing, as introduced in the previous subsection. The following sections explain the model development in detail, followed by the model evaluation and discussion.
2. Observation of Gas–Oil–Water Flow Downstream of Restrictions
Zhou et al. (2023) presented an experimental study on a gas–oil–water three-phase flow in a horizontal pipe downstream of a restriction [
18]. The study was conducted in a 5.25 cm horizontal pipe, with mineral oil as the oil phase, and air as the gas phase. The study employed a high-speed camera and an Electrical Capacitance Volume Tomography (ECVT) system, to better understand the oil–water flow patterns downstream of the restrictions. The latter was used to monitor the volumetric phase fraction distribution at the pipe cross-section with time. Details about the experimental setup and the instrument can be found in [
18].
The experimental results have shown that the restriction size can influence the oil–water flow pattern in the slug film and slug body regions and impact the overall pressure gradient consequently.
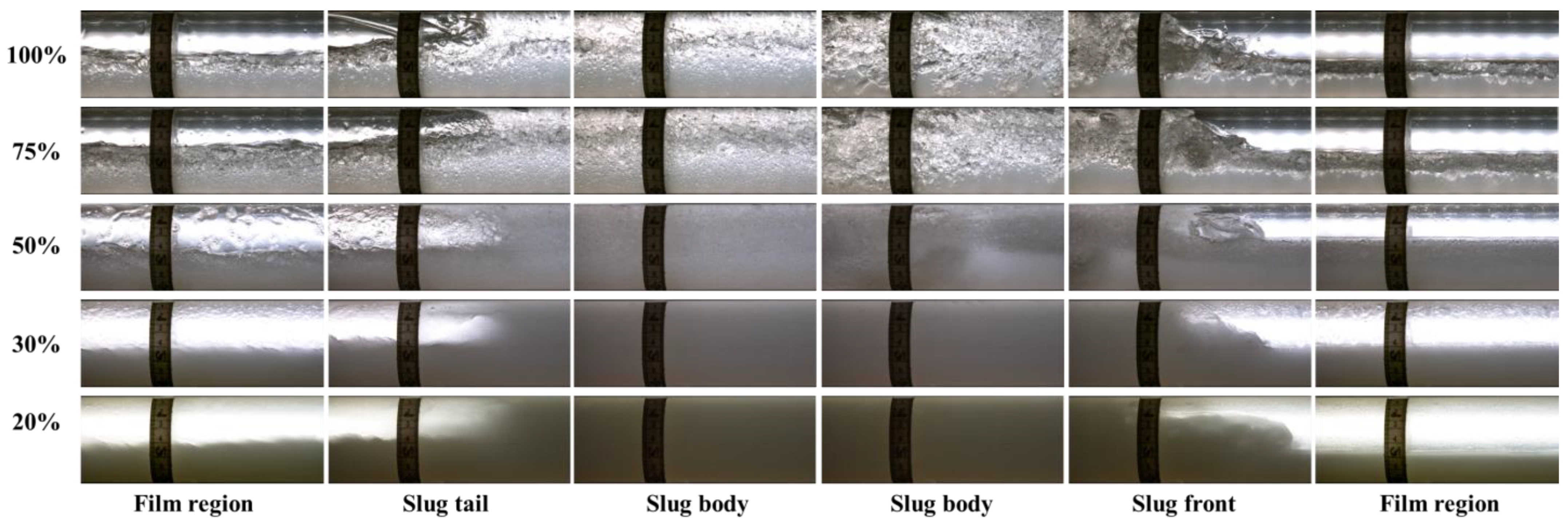
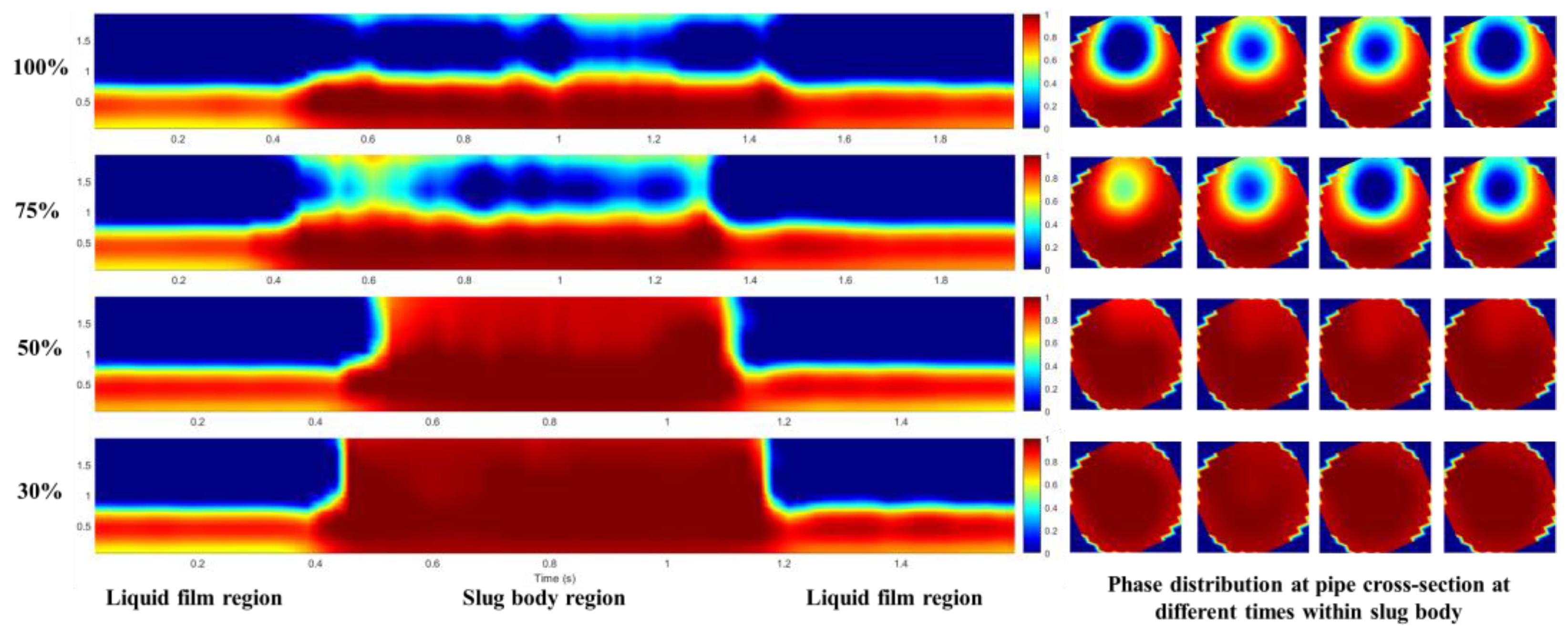
Figure 1 shows the pictures of the three-phase slug flow from a high-speed camera and
Figure 2 shows the phase distribution at pipe axial and cross-sectional directions from the ECVT sensor, for a liquid superficial velocity of 0.5 m/s and gas superficial velocity of 0.2 m/s with a 60% water cut at different valve openings, indicated on the left. Since the permittivity of air is much closer to that of oil compared to that of water, the ECVT images show very similar colors between the oil and air phases. In the ECVT plots, the red color denotes water, and blue mainly represents oil in the slug body and air in the film region above the interface. Combining the high-speed camera videos and the ECVT images, we can better understand the oil–water flow patterns in the slug body, which mostly impacts the overall pressure gradient. From
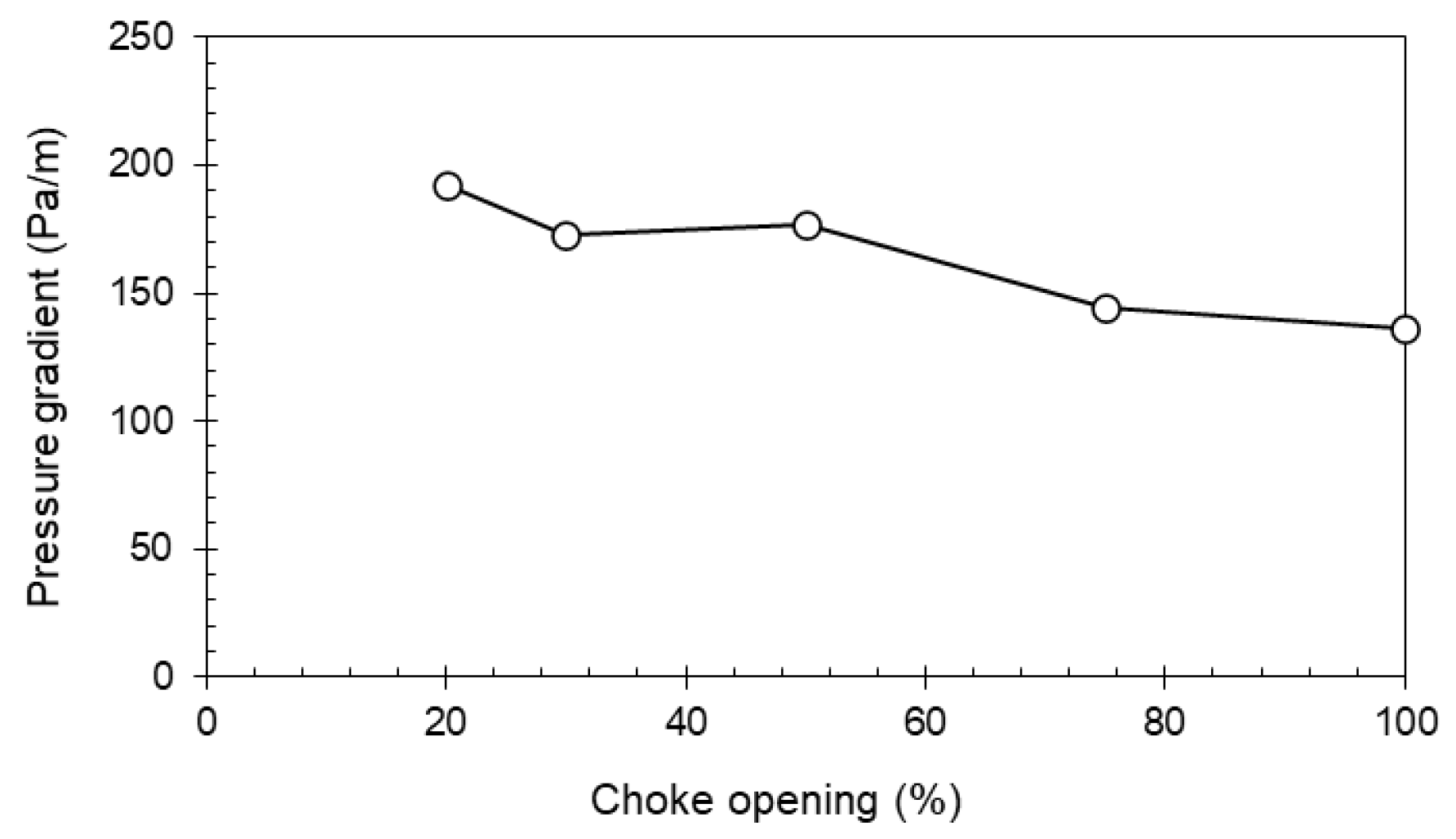
Figure 1, it can be seen that the restriction enhances the oil–water mixing and changes the flow pattern from a separated to dispersed flow as the opening is reduced. The oil–water flow pattern in the slug body gradually changes from a partially mixed oil-water flow to an oil-in-water dispersed flow (O/W) as the opening is reduced below 50%. The corresponding pressure drop is shown in
Figure 3. Generally, the pressure gradient increases as the choke opening decreases, which is due to the increase in the thickness of the mixing layer or the mixture viscosity within the mixing layer.
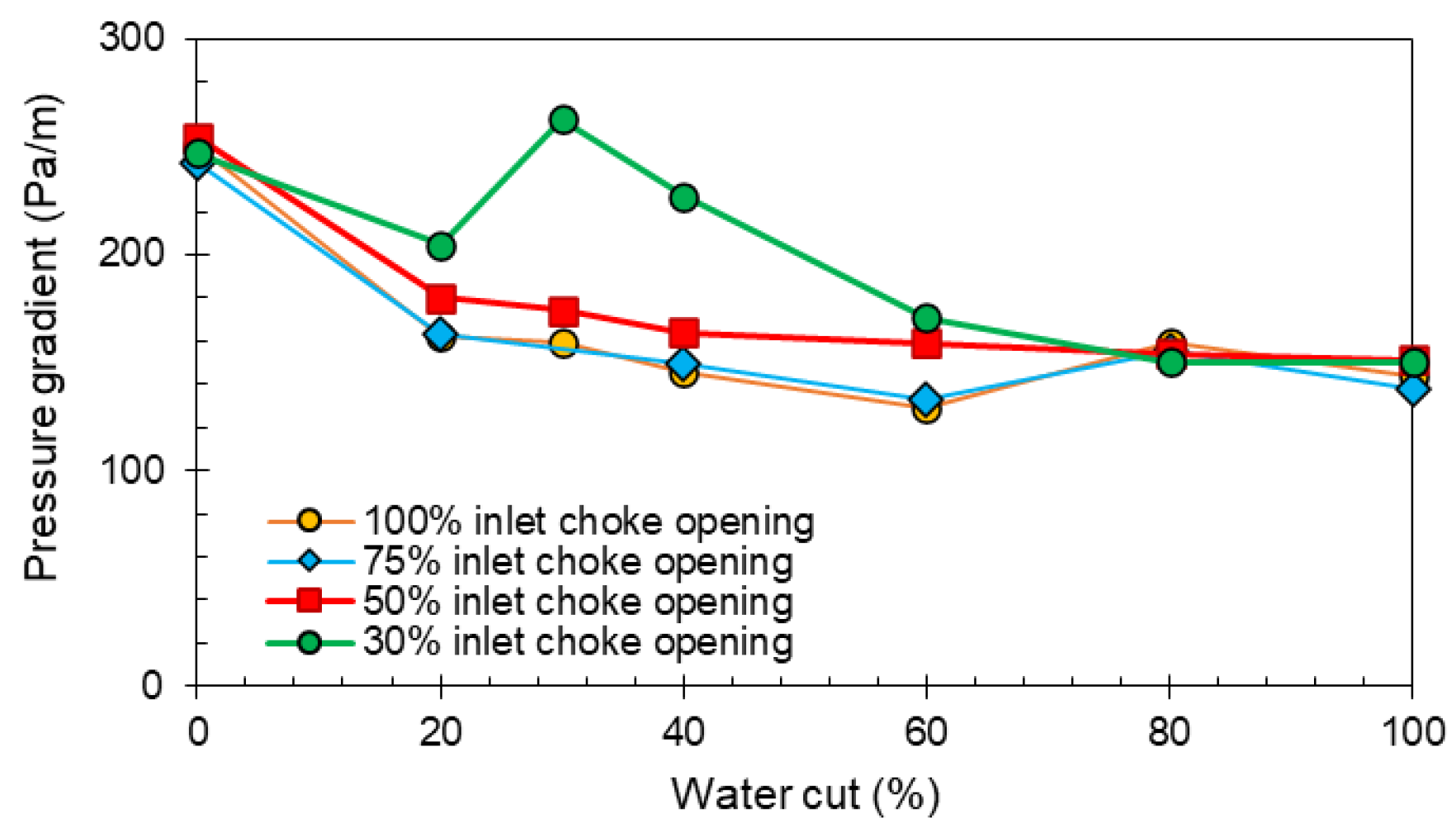
The variation in the pressure gradient with the water cut also depends on the size of the restrictions.
Figure 4 shows the pressure gradient as a function of the water cut for four different choke openings from 100% to 30%. The complex behavior is due to the mixing between oil and water phases, which depends on many operating parameters including the restriction size.
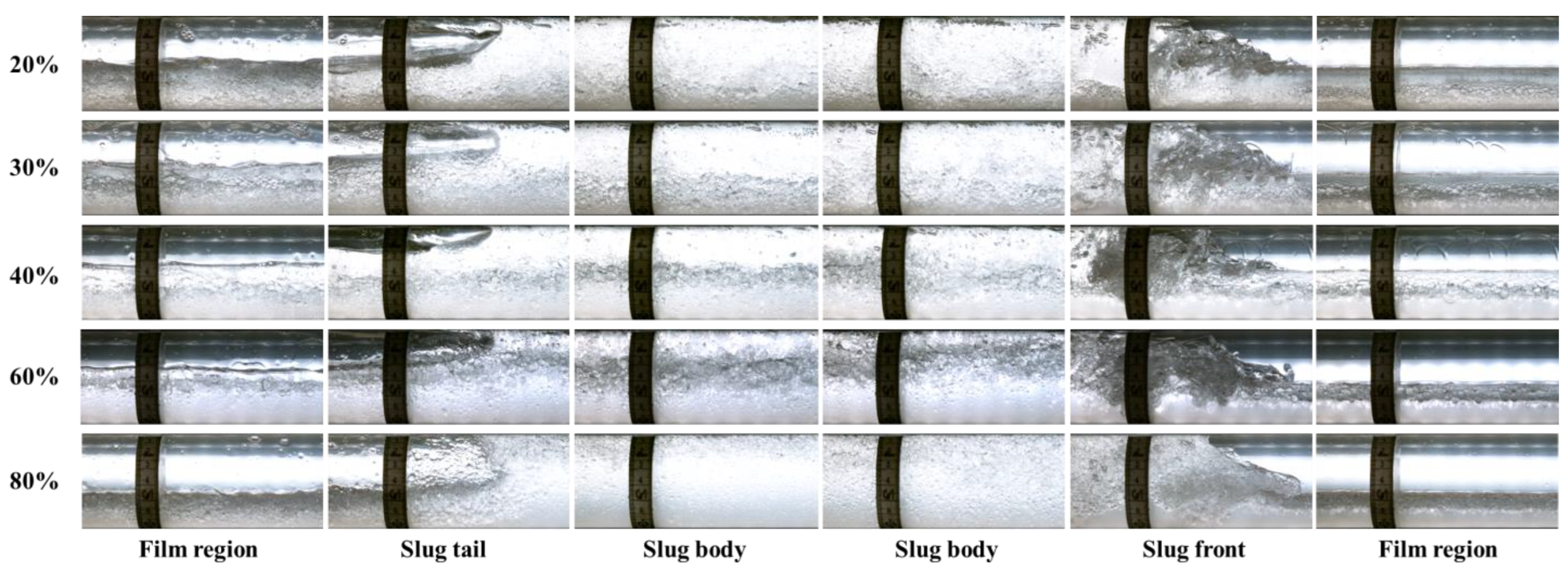
Figure 5 shows the pictures from the high-speed camera videos for different water cuts at a 100% choke opening. It can be noticed that (1) the water layer at the bottom increases as the water cut increases, and (2) the oil and water are more mixed as the water cut increases, which fully becomes an oil-in-water dispersed flow as the water cut is 80%. For the 30% choke opening, the oil–water flow is mostly a dispersed flow, but with some inhomogeneities. The oil–water flow pattern is W/O (dispersed water-in-oil) for a 20% water cut, and O/W (dispersed oil-in-water) for a 30% water cut. The high-pressure gradient at the 30% and 40% water cuts is due to the densely packed layer at the top part of the pipe, which generates a high frictional pressure drop. This observation is consistent with previous studies on oil–water two-phase flow, such as [
7,
18]. More details can be found in [
18].
From the modeling point of view, it is relatively easy to model a three-phase slug flow if the oil and water are fully dispersed (either oil-in-water or water-in-oil dispersion). Since the oil and water phases are fully mixed, they can be treated as a single phase, enabling the application of existing gas–liquid two-phase flow models for the gas–oil–water three-phase flow with a modification of the liquid properties. The most challenging phenomenon that has not been tackled is the “semi-dispersed” flow where the oil and water phases are partially mixed. In this study, we will focus on this type of flow pattern.
3. Model Development
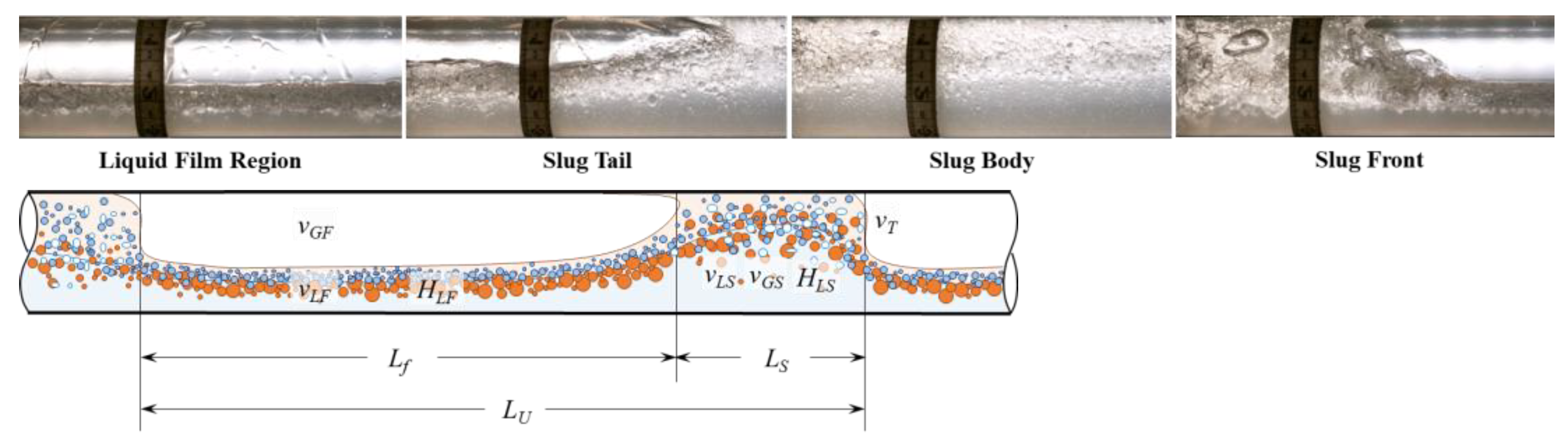
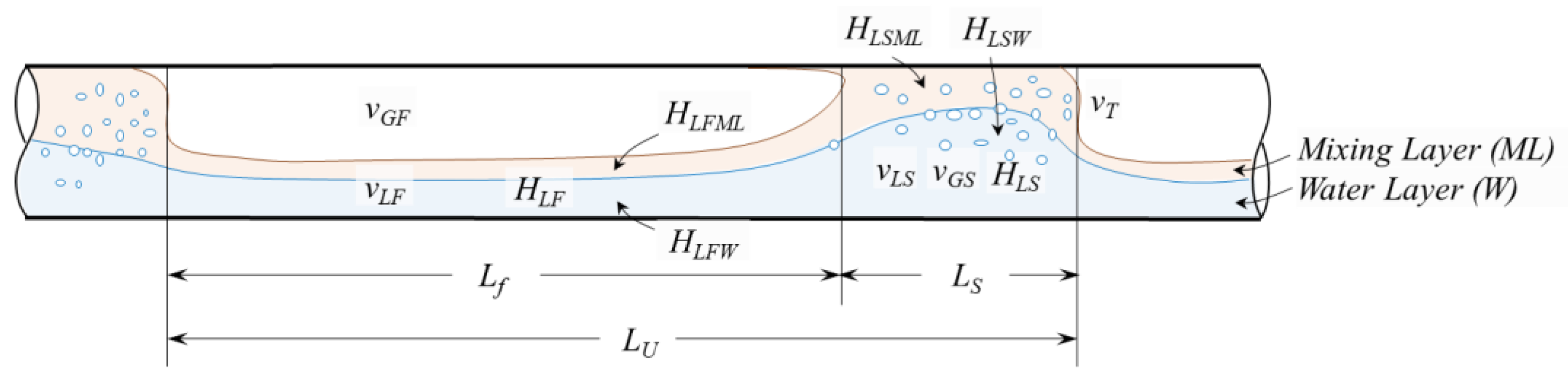
In this section, we introduce a new three-phase slug flow modeling approach for pressure drop predictions, with a focus on the flow pattern that shows some stratifications in the oil and water mixture liquid phase (
Figure 6 top). The bottom figure in
Figure 6 shows a conceptual schematic of the three-phase slug flow with some stratifications. A typical slug unit is composed of a liquid film region (also called gas pocket region) and a slug body region, with a respective length of
and
, as shown in
Figure 6. The length of the slug unit is
which is the summation of
and
. The other typical slug flow characteristic parameters are also denoted in
Figure 6.
is the translational velocity, which represents the slug front velocity.
and
are the average liquid and gas velocities within the slug body, while
and
refer to the average liquid and gas velocities in the film region.
and
are the liquid holdup in the slug body and liquid film region, respectively.
The modeling approach starts with the predictions of the liquid holdup and slug characteristic parameters indicated in
Figure 6. The pressure gradient is determined afterward based on the parameters obtained in the previous step.
The liquid holdup predictions are based on the fluid flow dynamics of the gas–liquid slug flow, assuming an equilibrium and constant film thickness along the entire film zone. In this approach, we treat the oil and liquid as a mixture to simplify the liquid holdup calculation procedure. Indeed, sensitivity studies were conducted to examine the model predictions of the liquid holdup in relation to the mixture viscosity, which is the most variable property among the oil and water mixture properties. The results showed minimal alterations, affirming the suitability of employing the proposed approach in the liquid holdup predictions.
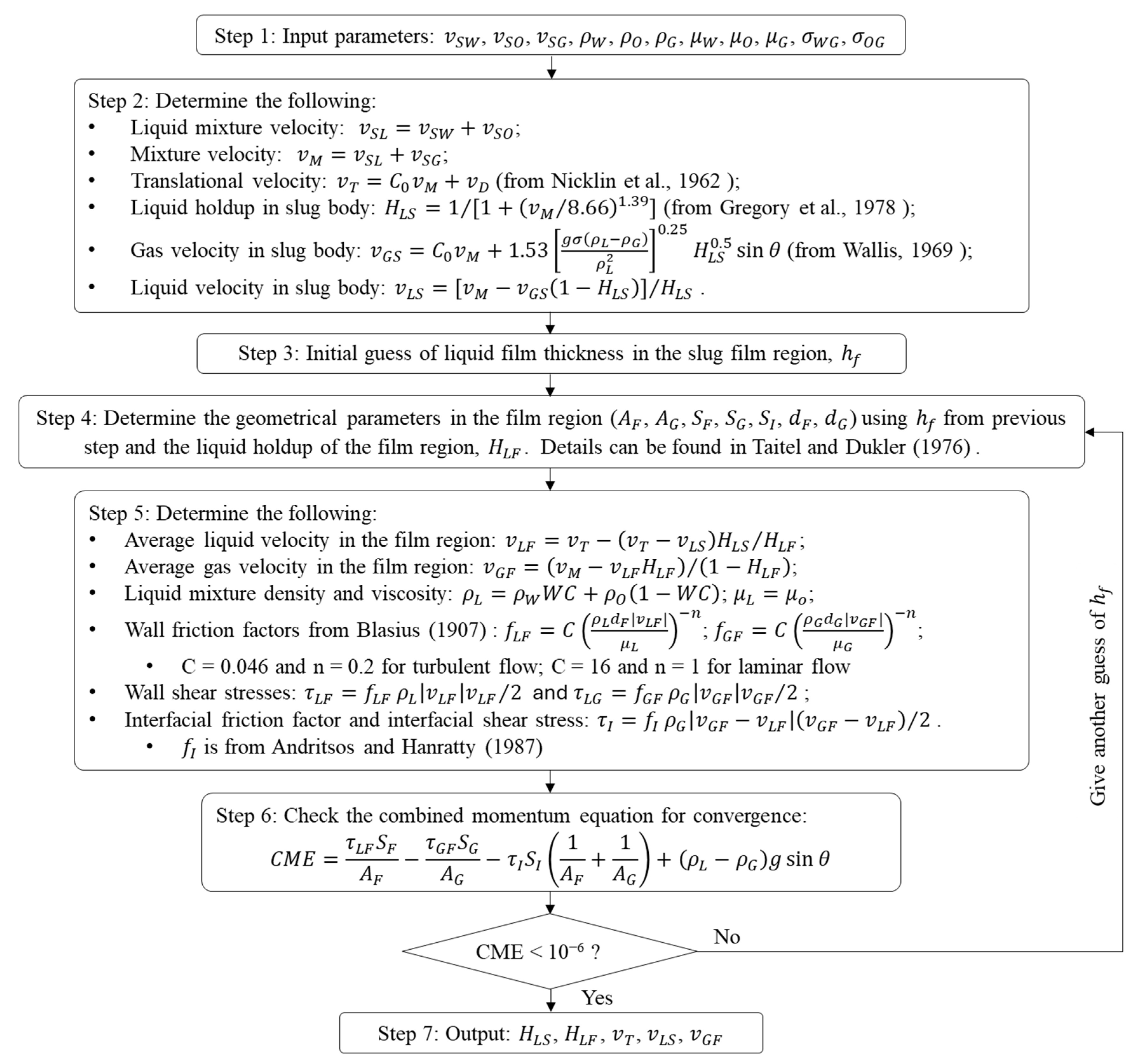
Figure 7 shows the flow chart for the liquid holdup calculations, as well as the other necessary slug flow characteristic parameters that will be used later for pressure gradient predictions.
The model requires iterations to solve for the liquid holdup in the liquid film region, using the combined momentum equation in the film region (Step 6 in
Figure 7). The method and procedure are similar to the ones proposed by Taitel and Barnea (1990) [
25]. It is worth mentioning that we also tested the slug flow model proposed by Zhang et al. (2003) [
26]. The major difference between these two models is that Zhang et al.’s combined momentum equation has an extra term that considers the momentum exchange between the slug body and film region. However, Zhang et al.’s model overpredicted the liquid holdup in the film region at our experimental conditions by around 50%, which drove us to lean toward the approach developed by Taitel and Barnea (1990) [
25].
Additionally, the model needs several closure relationships, including the slug translational velocity, liquid holdup in the slug body, gas velocity in the slug body, wall friction factor, interfacial friction factor, geometrical parameters in the film region, etc. In our model, we used the typical correlation from Nicklin et al. (1962) [
33] for slug translational velocity prediction (Step 2 in
Figure 7), where the flow distribution coefficient,
, is 1.2 for turbulent flow and 2.0 for laminar flow. The drift velocity is from Bendiksen (1984) [
34], which is given in Equation (1):
where
is the gravitational acceleration, m/s
2;
is the pipe diameter, m; and
is the inclination angle from horizontal. The liquid holdup in the slug body correlation is from Gregory et al. (1978) [
35], and the gas velocity in the slug body correlation is from Wallis (1969) [
36]. Since the gas entrainment is relatively low at our experimental conditions, we anticipate that these two correlations could have insignificant impacts on the final model predictions. However, the user can select the most suitable closure relationships for these two parameters based on their conditions. Details about the geometric parameters can be found in Taitel and Dukler (1976) [
37]. In addition, the wall friction factor correlation is from Blasius (1907) [
38], and the interfacial friction factor is from Andritsos and Hanratty (1987) [
39].
Figure 7.
Flow chart for liquid holdup and slug characteristic parameter calculation [
33,
35,
36,
37,
38,
39].
Figure 7.
Flow chart for liquid holdup and slug characteristic parameter calculation [
33,
35,
36,
37,
38,
39].
To predict the pressure gradient, we proposed a new approach that considers the partial mixing between the oil and water phases.
Figure 8 shows the simplified conceptual schematic of the new approach framework for the three-phase slug flow with all the necessary parameters listed. The liquid phase is separated into two layers, namely a mixing layer and a water layer, to consider the stratifications in the liquid phase. The mixing layer takes into account the complex mixing behaviors between the oil and water phases near the top of the liquid phase. In
Figure 8,
represents the average holdup of the mixing layer in the film region,
is the average holdup of the water layer in the film region,
refers to the average holdup of the mixing layer in the slug body region, and
is the average holdup of the water layer in the slug body region.
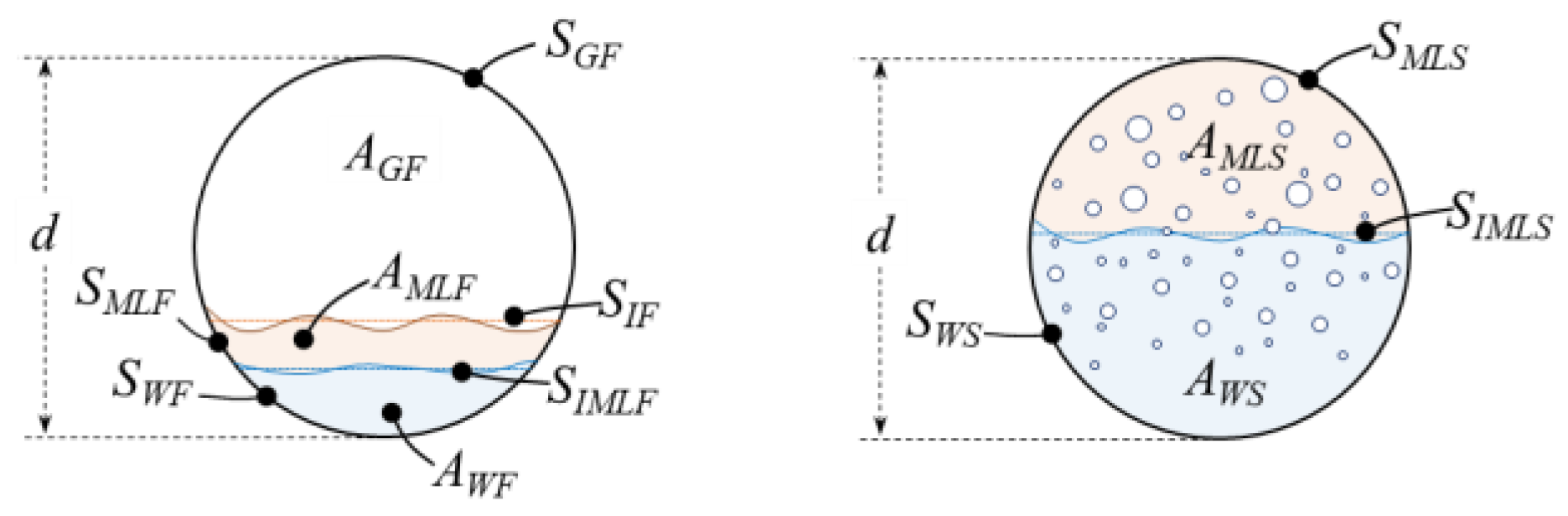
Figure 9 shows the geometrical parameters at the pipe cross-section in the film region and slug body region, respectively. In the film region,
,
, and
are the wetted perimeters of the gas, mixing layer, and the water layer.
and
are the lengths of the gas-mixture layer interface and the mixing-water layer interface. Similarly, in the slug body region,
and
are the wetted perimeters of the mixing layer and water layer, respectively.
is the length of the interface between the mixing and the water layers. Since it is a horizontal pipe flow, we assume a flat interface geometry.
The overall pressure drop over a slug unit is composed of two parts, namely the pressure drop in the slug body region
, which is the dominant one, and the pressure gradient in the film region
. The total pressure gradient is given in Equation (2):
The ratio of the slug body length and liquid film region can be derived from the continuity equation (Equation (3)), which is given in Equation (4). It is worth mentioning that, unlike some widely adopted models that assume a constant slug body length [
26], this approach does not require correlation for the slug body length, which is one of the most unpredictable parameters compared to others such as the slug translational velocity or slug body liquid holdup.
The pressure drop in the slug body region consists of the pressure drops from the mixture layer and the water layer and can be determined from Equation (5). The pressure drop in the liquid film region includes the pressure drops of the mixture layer, the water layer, and the gas pocket region, given in Equation (6). The corresponding geometrical parameters are illustrated in
Figure 9. We used the water cut to determine the wetted perimeters of the water and mixing layer,
and
. This assumption gives reasonable predictions based on our high-speed camera videos. Additionally, this assumption effectively captures the water cut’s impact on the free layer thickness, which directly impacts the overall pressure drop.
The wall shear stresses, and the friction factors, can be determined by Equations (7) and (8).
represents the gas, water, or mixing layer in the slug body or film region, and the hydraulic diameters can be determined by
for all involved phases except for the gas phase in the film region, where
.
We propose a new approach to predict the mixing layer viscosity that considers the effects of the choke opening, water cut, oil viscosity, and the liquid flow rate, as given in Equation (9).
is the reference viscosity that considers the effects of the dispersed phase fraction. The form was based on Brinkman’s (1952) [
27] model, but with modified coefficients and exponents, as given in Equation (10). The first coefficient in Equation (9),
, mainly accounts for the liquid mixture velocity effect on the mixing layer viscosity, which is also a function of the water cut based on the experimental observations. The second coefficient,
, accounts for the effect of choke on the mixing layer viscosity. Consistent with the previous experimental observation, the higher the pressure drop across the choke, the higher the mixing layer viscosity, and therefore, the higher the pressure drop.
where
is the water cut, -;
is the water cut at the inversion point, -;
is the oil viscosity, Pa·s;
is the superficial liquid velocity, m/s; and
is the pressure drop across the choke, kPa.
The following section discusses the model evaluation and the model performance through a parametric study.
4. Model Evaluation and Parametric Study
This section first describes the overall model performance, followed by a parametric study that systematically evaluates the model performance. The experimental data used for the model evaluation were from [
18], described previously in the introduction. These are the only available data that systematically discussed the restrictions’ effects on the gas–liquid–liquid flow pressure gradient in horizontal pipes.
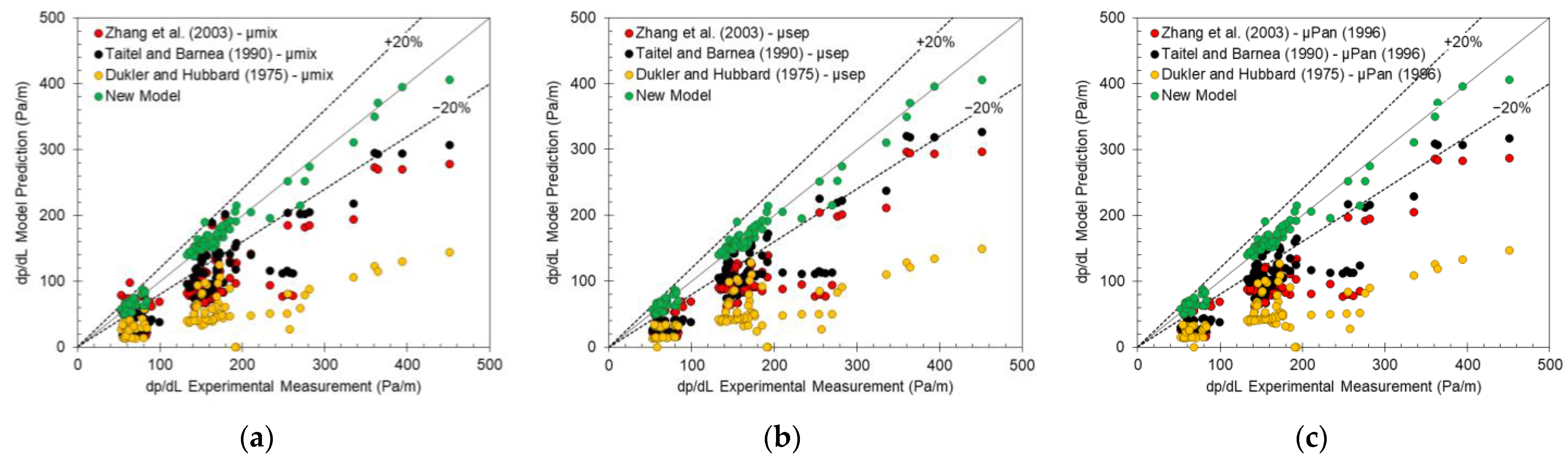
Figure 10 shows the comparison between the measured pressure gradient and the model prediction. The new model’s predictions are indicated as green dots. In addition to the new model, we also evaluated three other widely used slug flow models, in which the oil and water phases are treated as a mixture, as suggested by many previous studies. These models are Zhang et al.’s (2003) unified model [
26], Taitel and Barnea’s (1990) slug flow model [
25], and Dukler and Hubbard’s (1975) slug flow model [
24]. Due to the complex mixing degree of the liquid phases within the flow, various correlations exist in the literature to predict the liquid–liquid effective viscosity. In this work, we evaluated three widely used models, presented in Equations (13)–(16). Brinkman (1953) [
27] proposed a correlation for dispersed flow, given in Equation (13), which has been adopted and recommended by many modeling studies on gas–liquid–liquid flow, such as [
1,
19,
31]. If the oil and water phases are relatively separated, the water cut averaged mixture viscosity can be used [
1], given in Equation (14). Pan (1996) [
40] suggested a mixing degree coefficient, given in Equations (15) and (16), to account for the fluid flow that has partial mixing in the liquid phases.
where
is the mixture viscosity;
is the viscosity of the continuous phase;
is the volumetric fraction of the dispersed phase;
is the water volumetric fraction;
is the mixing degree coefficient proposed by Pan (1996); and
is the three-phase Reynolds number. The model performances are illustrated in
Figure 10 for the three different mixture viscosity correlations, respectively.
Table 1 lists the corresponding statistical parameters (defined in
Appendix B) for different models with different viscosity correlations. The new model gives reasonable predictions with the majority falling within the ±20% bars. The total absolute relative error is around 6.71%. The other models generally underpredict the pressure gradient, with Taitel and Barnea’s (1990) [
25] model with the separate viscosity being the best. However, the results from the three different viscosity models are very close at the investigated experimental conditions.
Another important component in the model evaluation is the parametric study, which systematically investigates the model performance with different variables. The results of our parametric study are presented below in terms of the effects of the choking level, water cut, and superficial velocities, respectively.
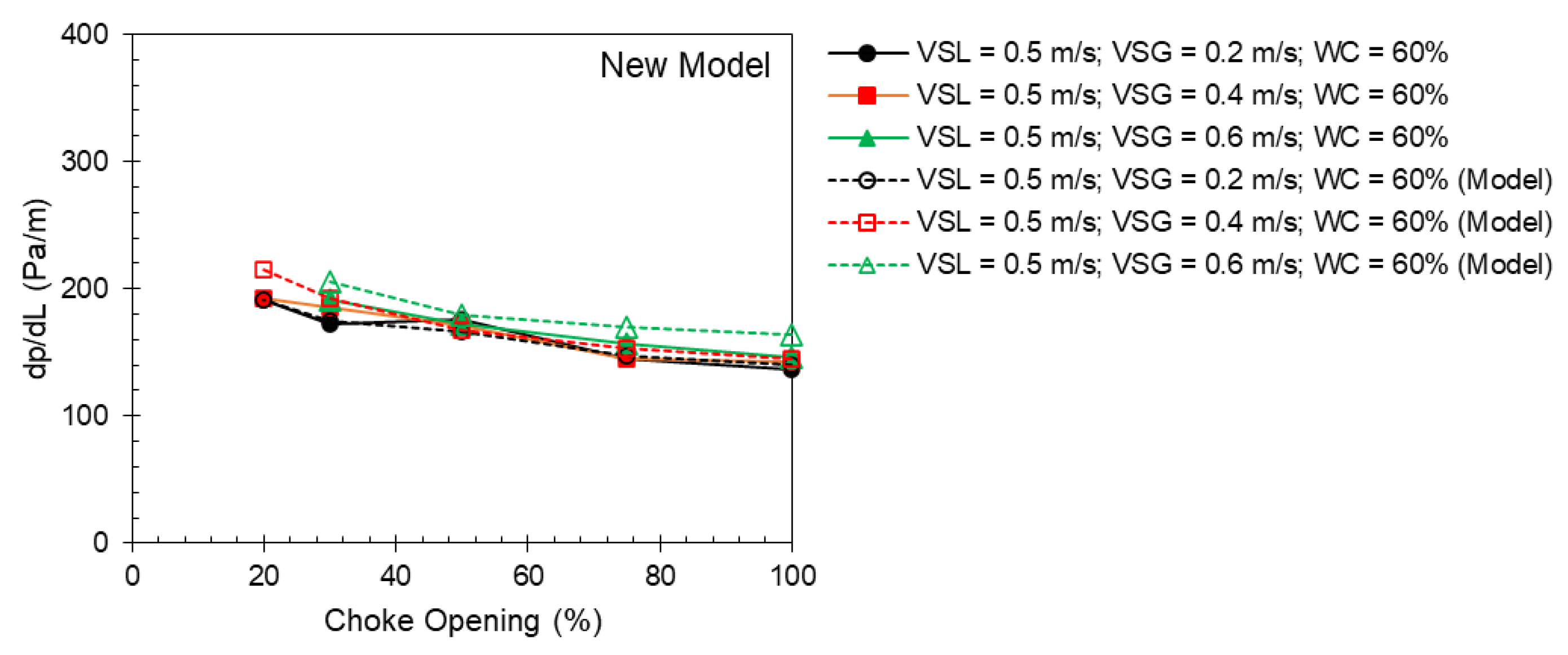
4.1. Effect of Choke Opening
The experimental study has shown that the restriction can enhance the mixing between the oil and water phases, increasing the mixing layer thickness, decreasing the droplet sizes, and elevating the mixture viscosity and the frictional pressure drop as consequences (see
Figure 1 and
Figure 2).
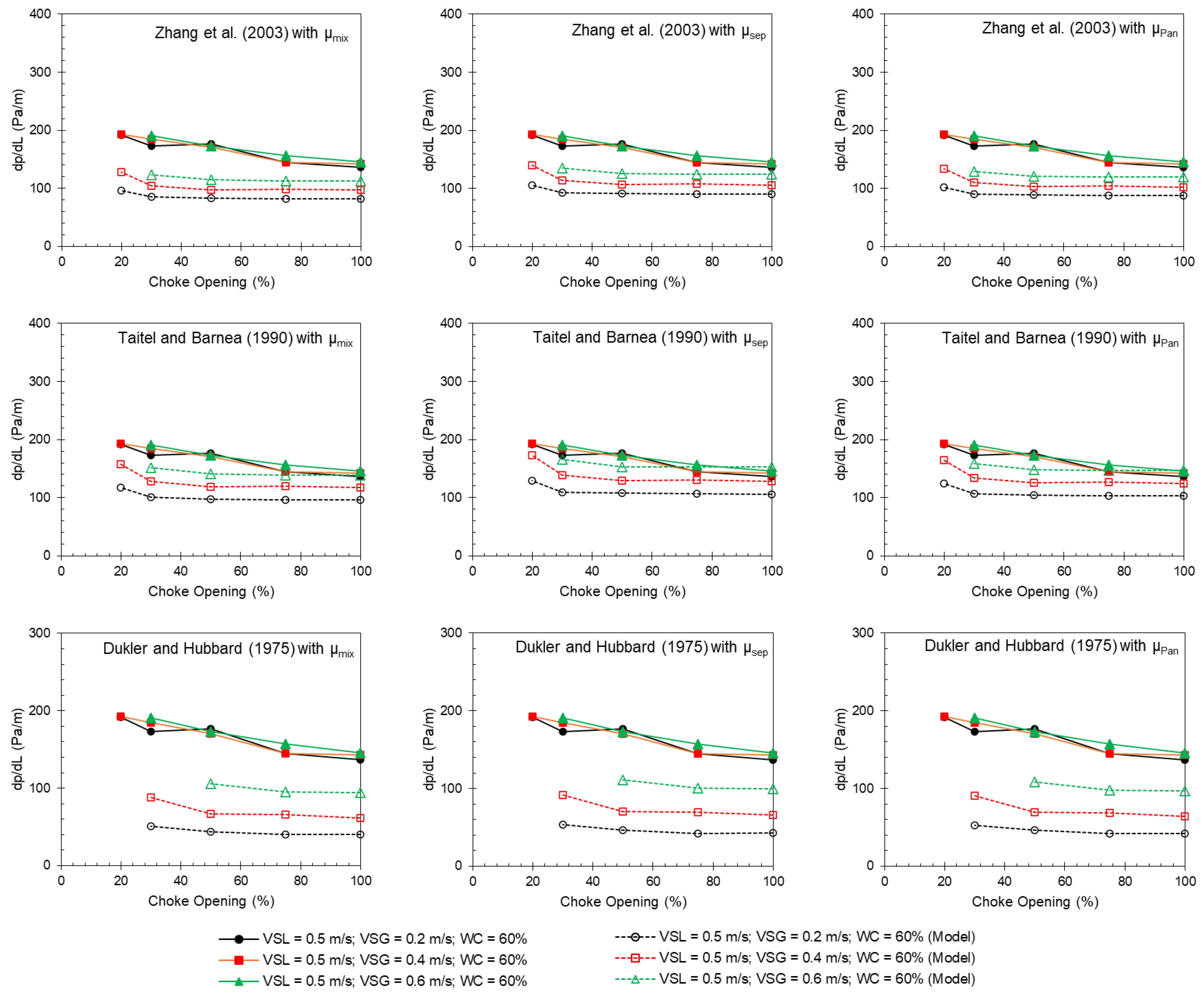
Figure 11 depicts the pressure gradient as a function of choke opening for three different gas flow rates at a constant liquid flow rate. The solid points are experimental measurements, and the hollow ones are the model predictions.
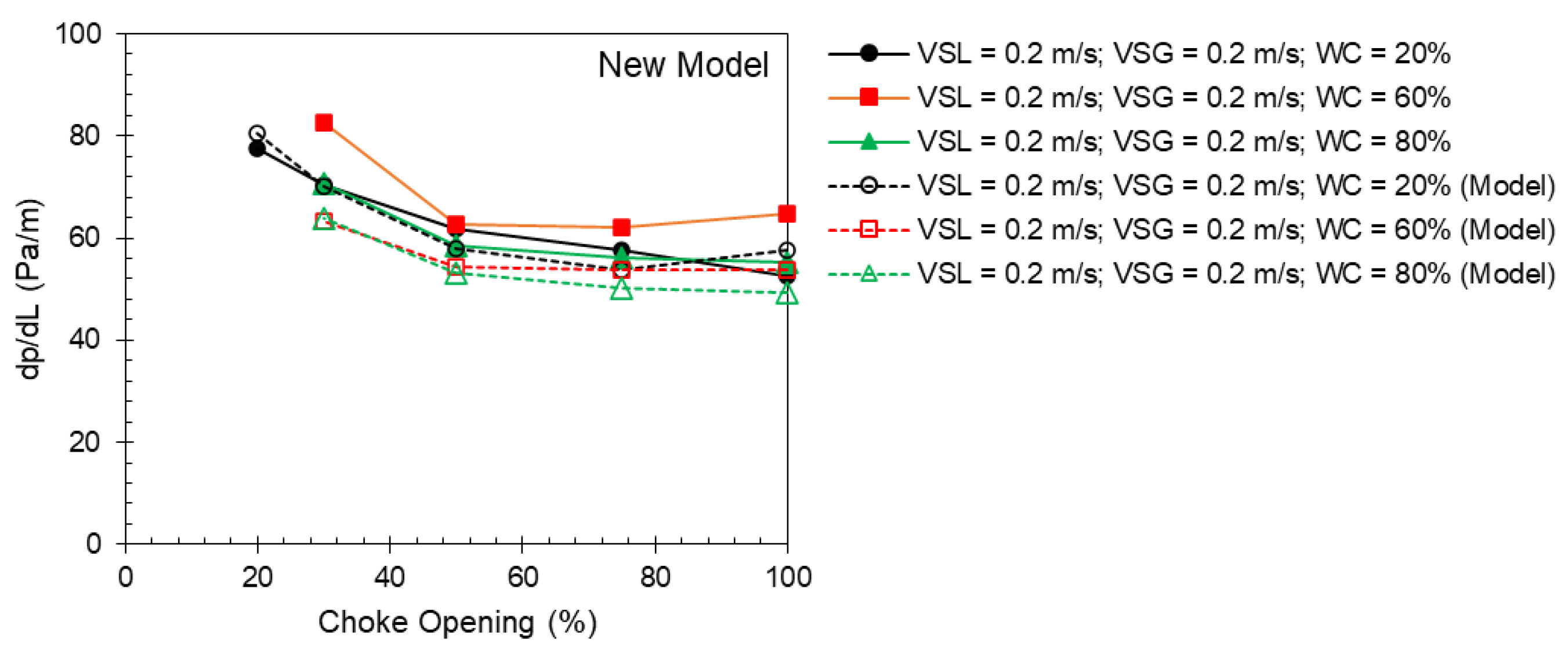
Figure 12 illustrates the predictions from the other three widely used models with the three different oil and water mixture models discussed before. The experimental data demonstrate that the pressure gradient generally increases as the choke opening is reduced. This phenomenon is captured well by the new model. It is expected that the other models do not capture this phenomenon because the choking component is not included in their models. Another group of figures in
Figure A1 and
Figure A2 in the
Appendix A show the model performance as a function of the choke opening for different water cuts at a constant gas and liquid velocity. It can be noted that the new model largely improves prediction as compared with the other models. The three mixture viscosity models, given in Equations (13)–(16), do not show a significant influence on the final model predictions for 60% and 80% water cuts, for which the oil and water flow is treated as oil-in-water dispersed in the mixture model. A large difference is observed for the 20% water cut, where the water-in-oil dispersed flow is assumed in the mixture model. The next subsection discusses the water cut effect on the pressure gradient as well as the model predictions further.
4.2. Effect of Water Cut
The variation in the pressure gradient with the water cut is a complex phenomenon and depends on the oil and water mixing degrees [
1].
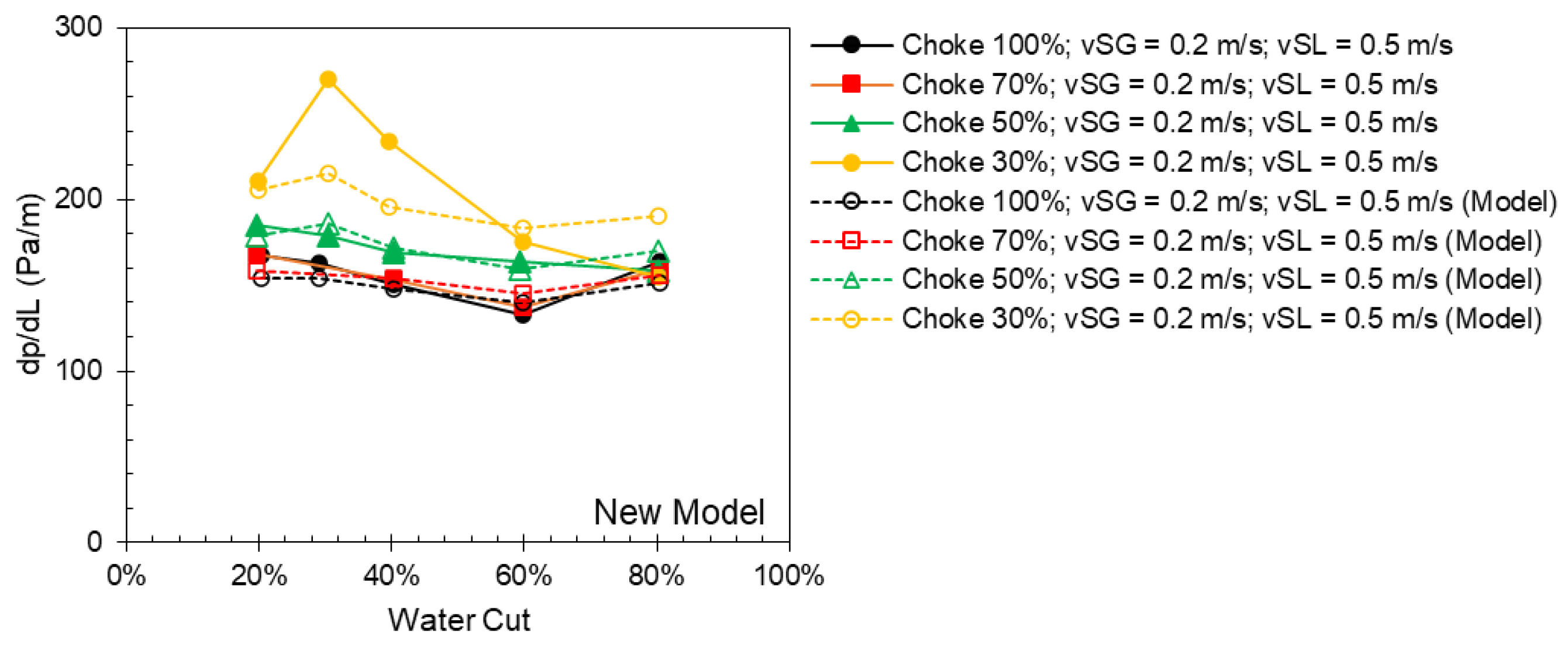
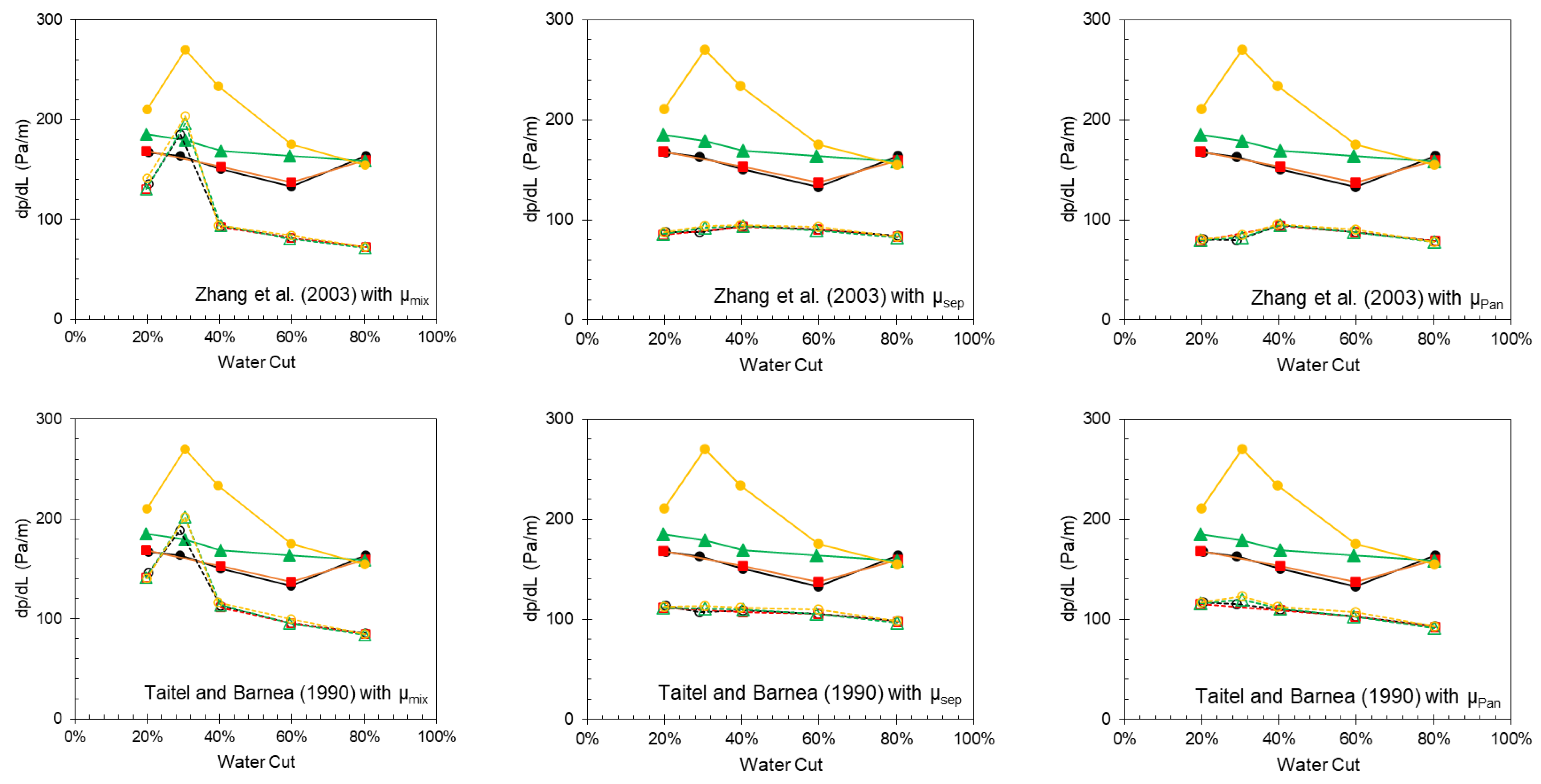
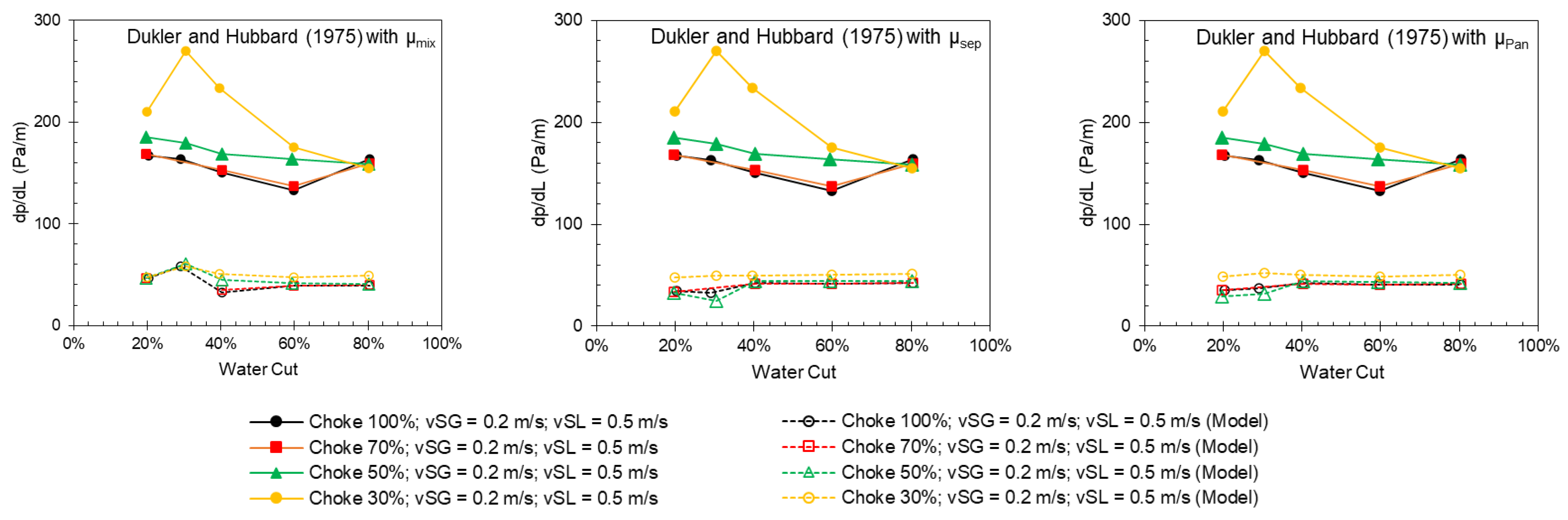
Figure 13 and
Figure 14 show the pressure gradient as a function of the water cut for the different choke openings at a constant gas and liquid flow rate, and the model predictions. For large choke openings (≥50%), the pressure gradient first decreases as the water cut increases, due to the increase in the water layer thickness. This phenomenon is captured by the new model, which considered the thickness of the free water layer. The pressure gradient bumps up at around an 80% water cut, due to the dense mixing layer on top of the free water layer. This phenomenon is also captured in the new model by the mixing layer. For the 30% choke opening, the experimental results show that the oil and water phases are dominantly dispersed, i.e., a water-in-oil dispersion for a water cut ≤ 30%, and an oil-in-water dispersion for a water cut higher than 30%. The inversion phenomenon is reflected in the pressure gradient plot that shows a peak at around a 30% water cut. The mixing viscosity model in Equation (13) captures the trend well, as shown in
Figure 14 (first column). Since the new model is developed mainly for a slug flow with partially mixed oil and water phases, the predicted trend is not as good as the ones predicted by Zhang et al. (2003) [
26] or Taitel and Barnea (1990) [
25] with the mixing viscosity model.
4.3. Effect of Superficial Velocities
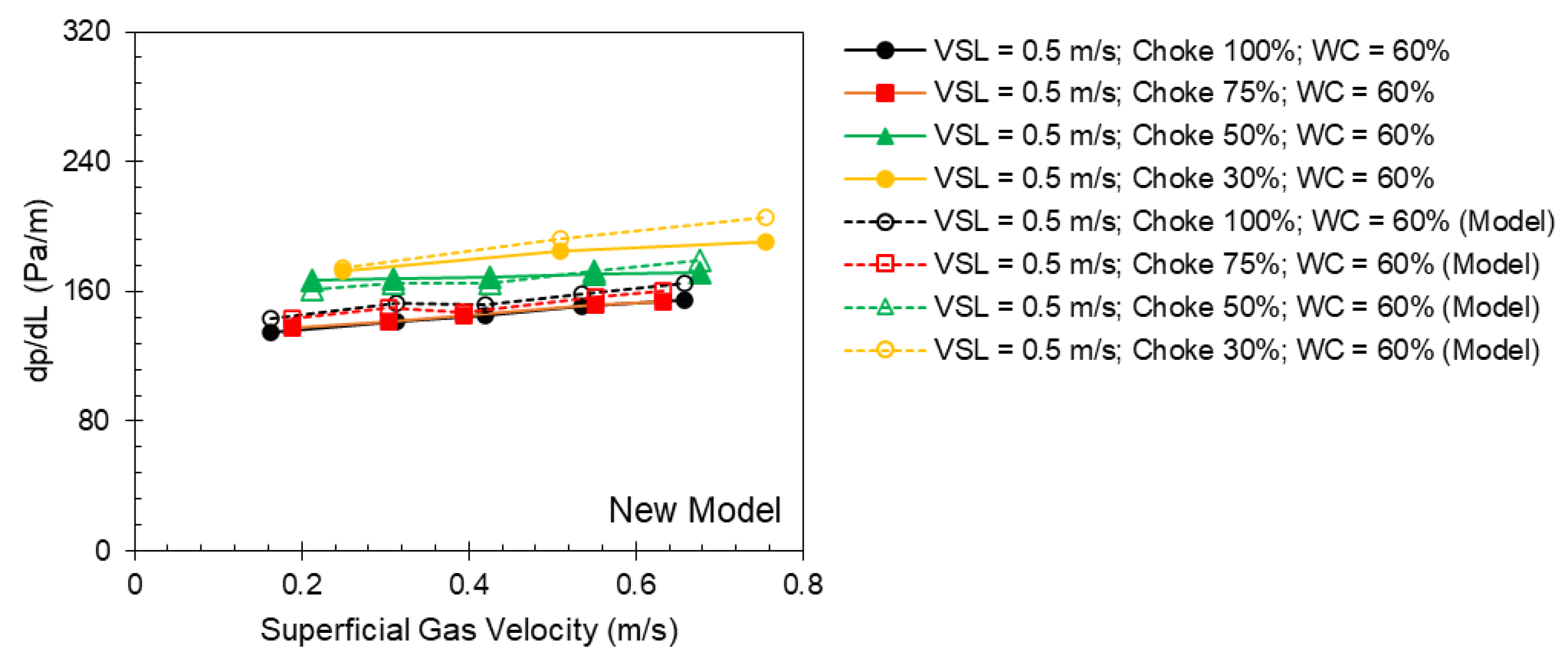
Generally, the pressure gradient increases with an increase in either the liquid or gas flow rate.
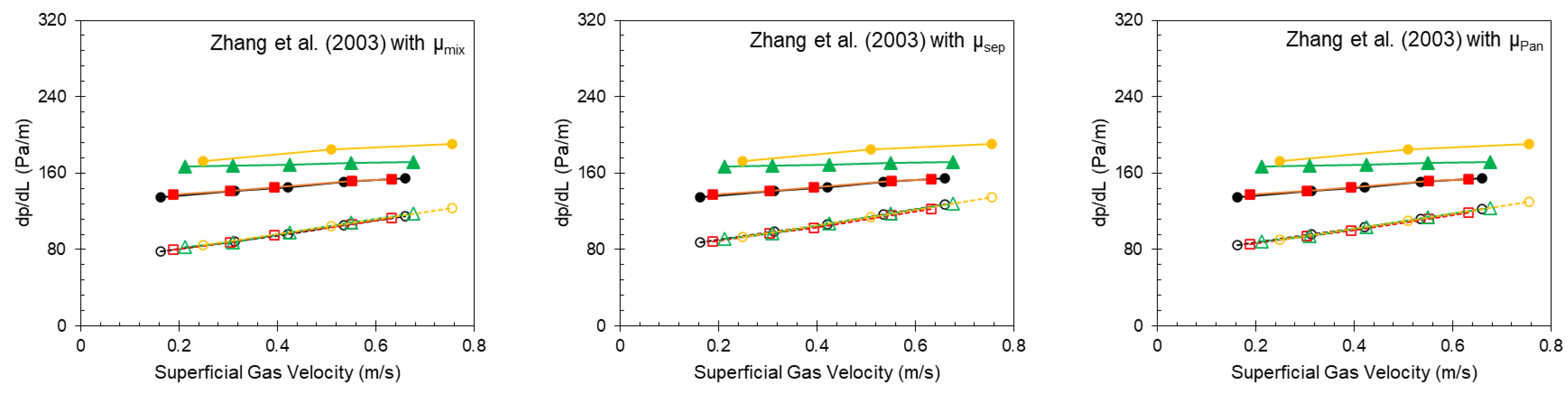
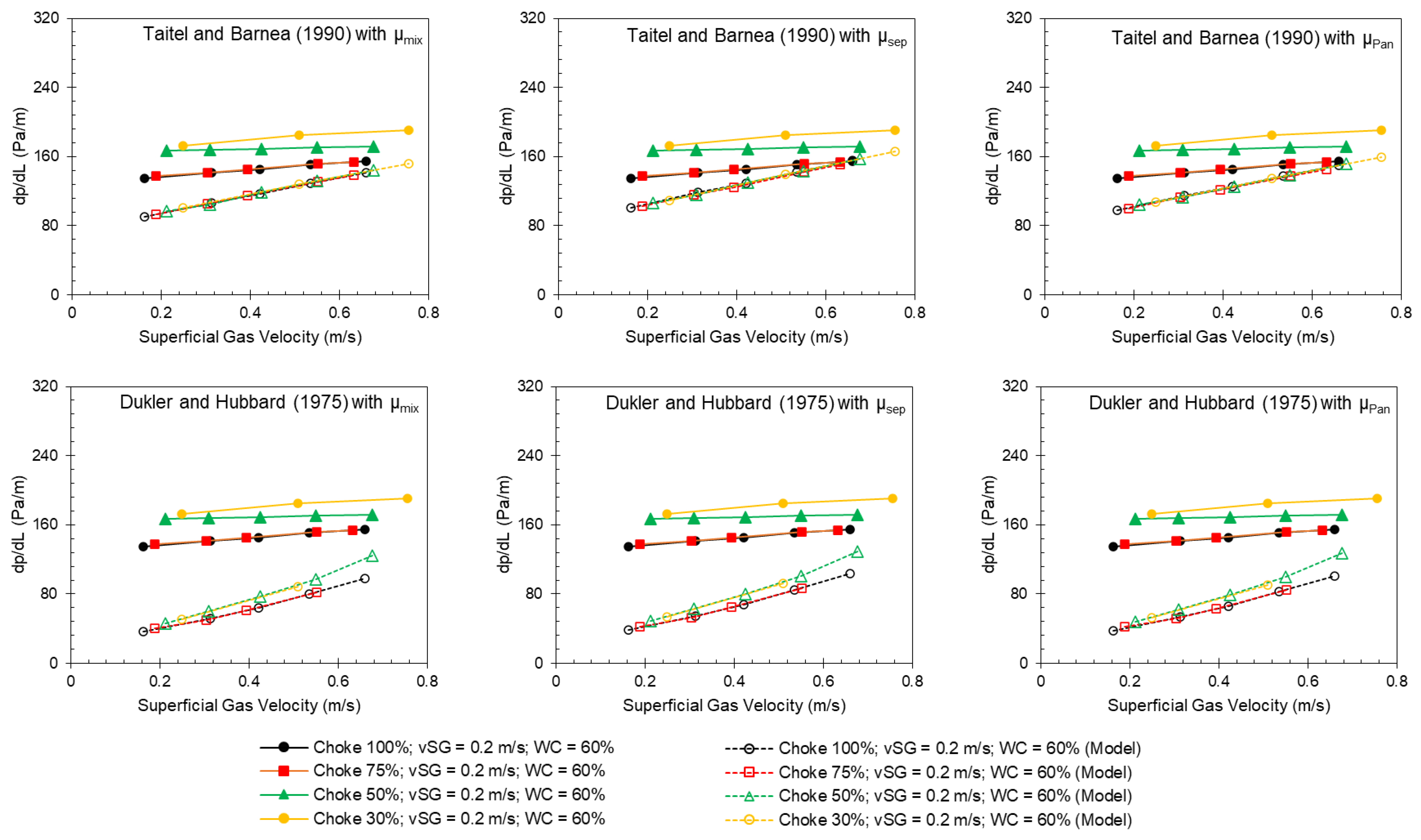
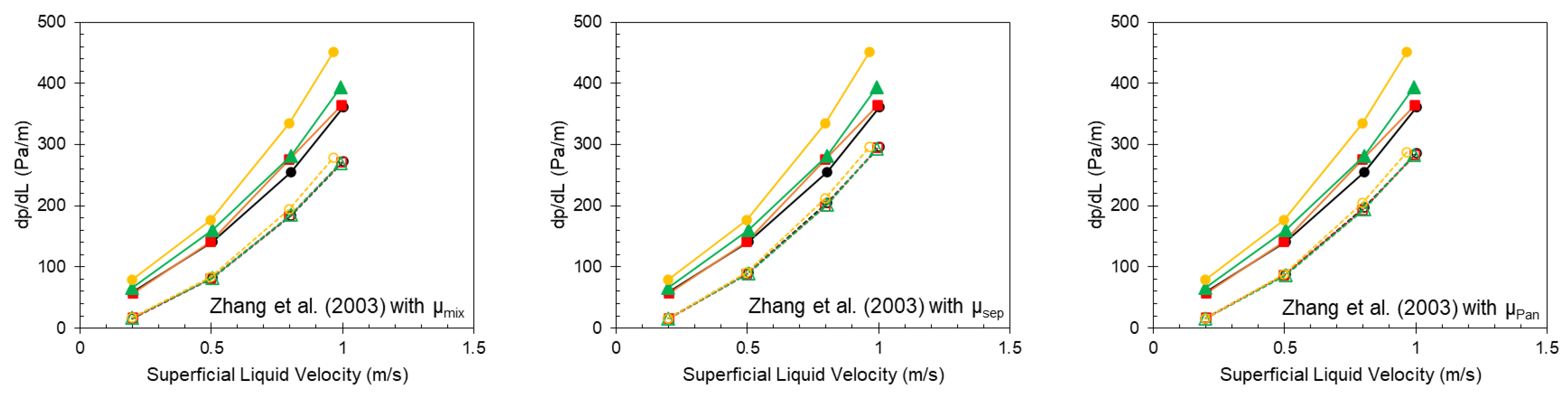
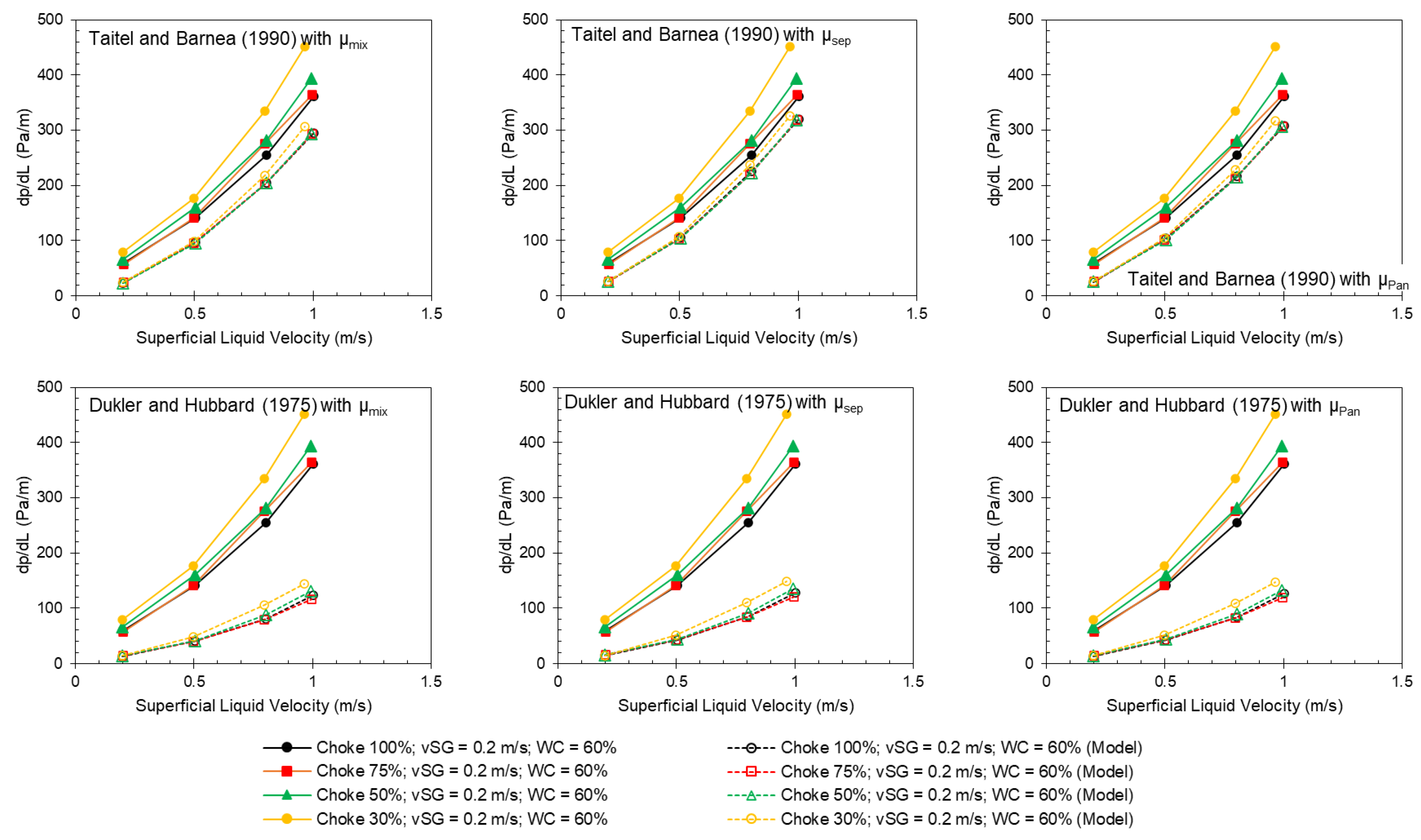
Figure 15 and
Figure 16 show the measured pressure gradient as a function of the superficial gas velocity for different choke openings at a constant liquid flow rate and water cut, and predictions from the new model and other models, respectively.
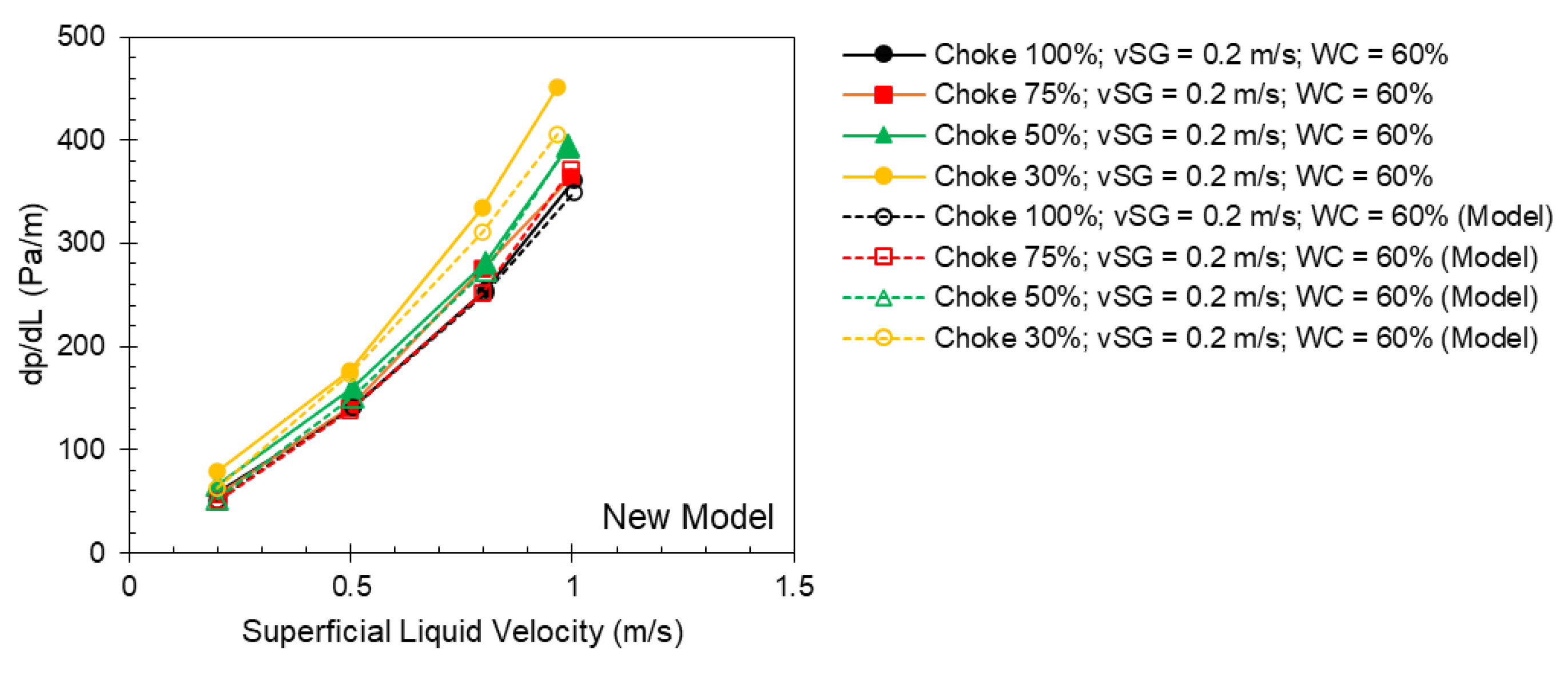
Figure 17 and
Figure 18 show the same plots but as a function of the superficial liquid velocity. Overall, all models correctly capture the increased trend with increasing flow rates. However, the other models generally underpredict the pressure gradient for the water cut investigated, regardless of the oil and water mixture viscosity model.
In summary, for the investigated experimental conditions, the new model gives the best predictions for the three-phase slug flow with the oil and water phases being partially mixed. Additionally, the parametric study shows that the new modeling approach effectively captures the effects of the choke size, water cut, and liquid and gas flow rate, on the pressure gradient in horizontal pipes, outperforming other models.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}