

Predictive Model for EV Charging Load Incorporating Multimodal Travel Behavior and Microscopic Traffic Simulation

 , , , ,
, , , ,
Abstract
1. Introduction
- The NHTS2017 statistical data [31] reveal that vehicle travel chains can extend beyond five, while residents’ primary travel purposes can be categorized into eight categories. However, the existing literature lacks a comprehensive analysis of users’ diverse travel behaviors.
- Few studies have focused on the microscopic modeling of EVs traveling in transportation networks. Graph-theoretic-based traffic simulation methods have limitations in accurately describing the real movement characteristics of vehicles and dynamic changes in traffic conditions. Furthermore, traditional single-lane car-following models struggle to reflect the interactivity of vehicles on the road, neglect to account for the intricacies of lane-changing behavior, possess limited capacity to handle traffic congestion, and deviate from real-world situations.
- The existing literature commonly assumes that vehicles start and end their journeys at network nodes, as well as giving little attention to the average vehicle delay caused by traffic signals. Furthermore, real-time traffic information is often not taken into account when determining optimal routes.
2. EV Travel Spatiotemporal Model
2.1. Distribution of Initial Travel Time and Location
2.2. Travel Purpose Transfer Probability
2.3. Duration of Parking in Different Functional Areas
3. Microscopic Traffic Simulation Model
3.1. Vehicle Evolution Update Rules Based on the STCA-II Model
- Lane-changing Behavior Update
- 2.
- Acceleration Behavior Update
- 3.
- Deceleration Behavior Update
- 4.
- Stochastic Deceleration Behavior Update
- 5.
- Location Update
3.2. Optimal Path Decision-Making Considering Signal Intersection Delays, Real-Time Vehicle Speeds, and Start–Stop Positions
- Step1
- 2.
- Step2
- 3.
- Step3
| Algorithm 1: Pseudocode of improved Floyd algorithm (Procedure) |
| for k = 1 : q + 2 for a = 1 : q + 2 for b = 1 : q + 2 if T(a,k) ≠ inf & T(k,b) ≠ inf & a ≠ k & k ≠ b & k ≠ q + 1 & k ≠ q + 2 then By utilizing Z, the current optimal path from node a to node k can be computed and the preceding node k’ of node k can be retrieved The vehicle’s location in terms of road and lane group is determined based on nodes k and k’, facilitating the extraction of corresponding HT, Fh, σh, and φh Calculate εh by (11) else εh = 0 end if if T(a,b) > T(a,k) + T(k,b) +εh then T(a,b) = T(a,k) + T(k,b) +εh Z(a,b) = k end if end for end for end for |
3.3. Unit Distance Energy Consumption Model
4. Predictive Framework for Spatiotemporal Distribution of EV Charging Load with Real-Time Information in Traffic-Power Coupled Network
4.1. Electricity Pricing Model Considering the Secure Operation of Power Distribution Networks
4.2. Charging Station Decision Model Based on Regret Theory
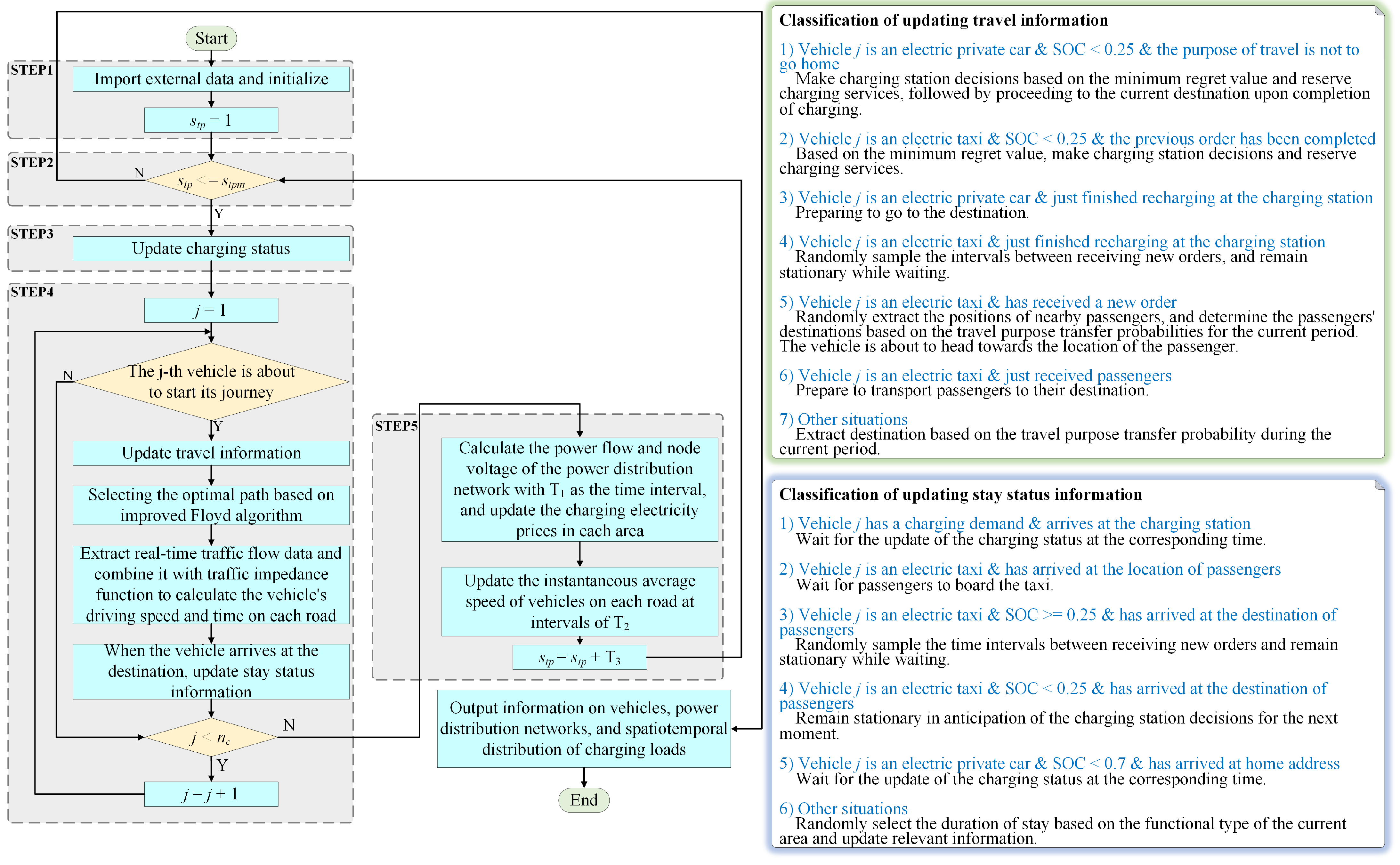
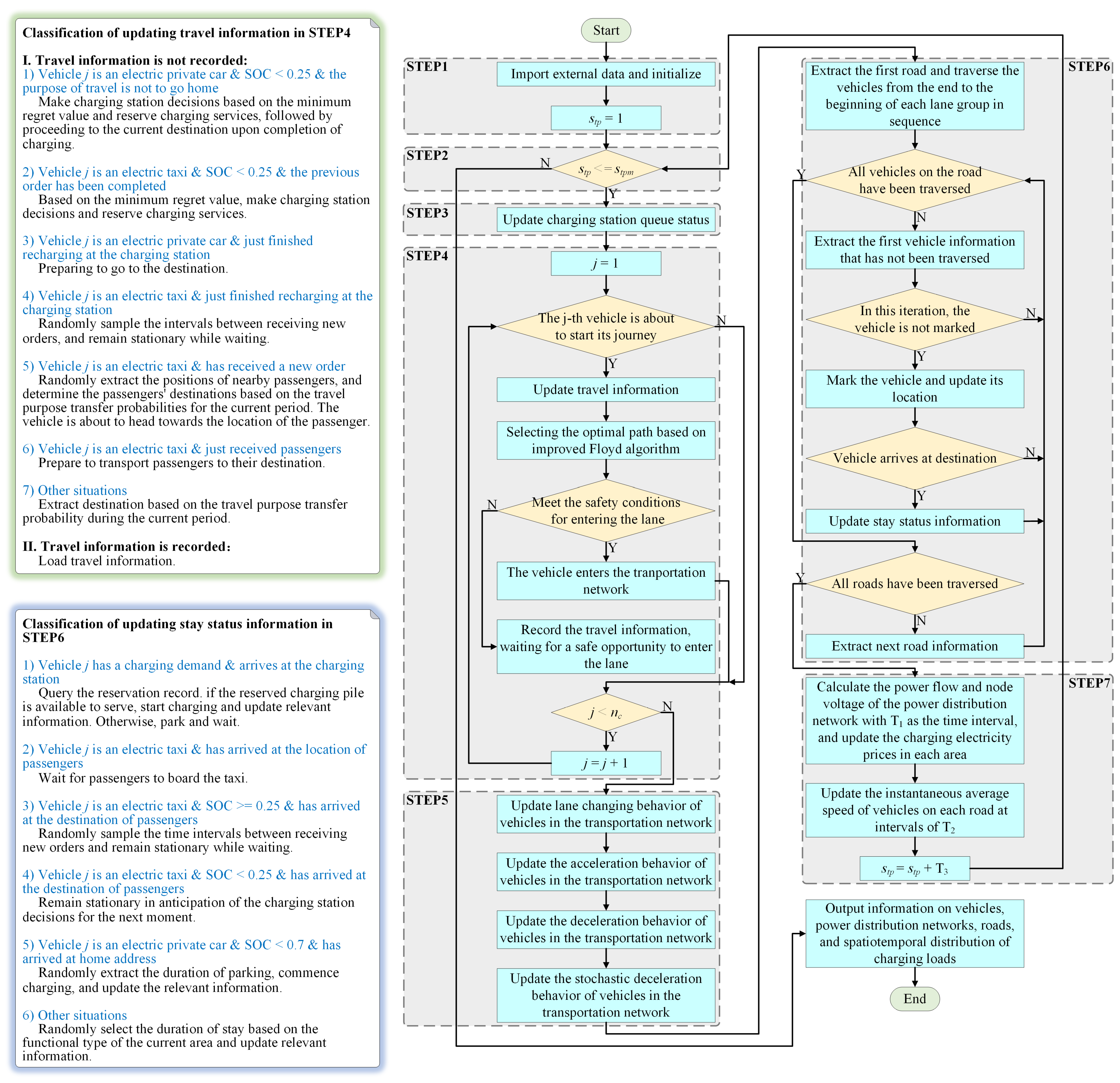
4.3. Spatiotemporal Distribution Predictive Framework for EV Charging Load
- Step1
- 2.
- Step2
- 3.
- Step3
- 4.
- Step4
- 5.
- Step5
- 6.
- Step6
- 7.
- Step7
5. Case Analysis
5.1. Parameter Settings
5.2. Simulation Results Analysis
6. Conclusions
- A refined spatiotemporal model for EV travel was established. From a temporal perspective, the distribution of EV travel time variables is described more accurately. From a spatial perspective, the multimodal of user travel and the diversity of functional areas are fully taken into account.
- The construction of a sophisticated microscopic simulation system for transportation networks is based on the multi-lane cellular automaton model. In contrast to conventional approaches that rely on graph-theoretic methods to describe the macroscopic topology of transportation networks, this methodology enables a more realistic representation of intricate vehicle movements within the network.
- Supported by real-time information exchange within the coupled network, the optimal path decision-making process takes into account the scenarios where the EV’s starting and ending positions are located in the middle of road segments, together with the impact of delays at signalized intersections. Additionally, the strategy for selecting charging stations contemplates the psychology of user regret, thereby rendering the decision-making process more congruent with actual conditions.
- The proposed framework exhibits a certain degree of universality, as it only requires the substitution of specific data sets to enable its application in various scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Number | Network Node A | Network Node B | Length (m) | Road Number | Network Node A | Network Node B | Length (m) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 1900 | 55 | 32 | 38 | 175 |
| 2 | 1 | 10 | 950 | 56 | 32 | 33 | 1600 |
| 3 | 2 | 3 | 1050 | 57 | 29 | 33 | 2750 |
| 4 | 2 | 11 | 1000 | 58 | 33 | 52 | 2500 |
| 5 | 3 | 4 | 1100 | 59 | 34 | 40 | 1050 |
| 6 | 3 | 22 | 3450 | 60 | 35 | 54 | 1950 |
| 7 | 4 | 5 | 500 | 61 | 35 | 39 | 2900 |
| 8 | 4 | 12 | 700 | 62 | 36 | 37 | 1100 |
| 9 | 5 | 6 | 1600 | 63 | 36 | 42 | 550 |
| 10 | 5 | 13 | 600 | 64 | 37 | 38 | 550 |
| 11 | 6 | 7 | 1850 | 65 | 37 | 43 | 400 |
| 12 | 6 | 14 | 550 | 66 | 38 | 48 | 600 |
| 13 | 7 | 8 | 2350 | 67 | 39 | 40 | 950 |
| 14 | 7 | 16 | 550 | 68 | 39 | 61 | 1750 |
| 15 | 8 | 9 | 2500 | 69 | 40 | 41 | 600 |
| 16 | 8 | 17 | 500 | 70 | 40 | 49 | 1250 |
| 17 | 9 | 31 | 3350 | 71 | 41 | 42 | 500 |
| 18 | 10 | 20 | 1050 | 72 | 41 | 49 | 600 |
| 19 | 10 | 11 | 1450 | 73 | 42 | 43 | 1100 |
| 20 | 11 | 21 | 1400 | 74 | 42 | 46 | 475 |
| 21 | 12 | 24 | 1800 | 75 | 43 | 47 | 400 |
| 22 | 12 | 13 | 650 | 76 | 44 | 45 | 1500 |
| 23 | 13 | 18 | 400 | 77 | 45 | 59 | 1350 |
| 24 | 13 | 14 | 1500 | 78 | 46 | 47 | 1000 |
| 25 | 14 | 19 | 400 | 79 | 47 | 50 | 400 |
| 26 | 14 | 15 | 450 | 80 | 47 | 48 | 500 |
| 27 | 15 | 16 | 550 | 81 | 48 | 51 | 425 |
| 28 | 15 | 27 | 1750 | 82 | 49 | 50 | 1650 |
| 29 | 16 | 28 | 1725 | 83 | 50 | 51 | 750 |
| 30 | 16 | 17 | 2400 | 84 | 50 | 55 | 425 |
| 31 | 17 | 29 | 1700 | 85 | 51 | 56 | 425 |
| 32 | 18 | 25 | 1150 | 86 | 52 | 53 | 1400 |
| 33 | 18 | 19 | 1450 | 87 | 52 | 57 | 600 |
| 34 | 19 | 26 | 1100 | 88 | 44 | 53 | 500 |
| 35 | 20 | 21 | 900 | 89 | 53 | 58 | 1000 |
| 36 | 20 | 35 | 1400 | 90 | 53 | 59 | 1500 |
| 37 | 21 | 22 | 900 | 91 | 39 | 54 | 2400 |
| 38 | 21 | 34 | 3000 | 92 | 54 | 60 | 600 |
| 39 | 22 | 23 | 1050 | 93 | 55 | 63 | 450 |
| 40 | 22 | 34 | 600 | 94 | 52 | 56 | 1500 |
| 41 | 23 | 24 | 450 | 95 | 56 | 64 | 750 |
| 42 | 23 | 36 | 1050 | 96 | 57 | 58 | 750 |
| 43 | 24 | 25 | 475 | 97 | 57 | 65 | 475 |
| 44 | 25 | 26 | 1150 | 98 | 58 | 66 | 475 |
| 45 | 25 | 37 | 1000 | 99 | 59 | 67 | 950 |
| 46 | 26 | 27 | 500 | 100 | 60 | 61 | 2250 |
| 47 | 26 | 32 | 400 | 101 | 61 | 62 | 2000 |
| 48 | 27 | 28 | 475 | 102 | 55 | 62 | 2600 |
| 49 | 28 | 29 | 2500 | 103 | 62 | 63 | 2300 |
| 50 | 28 | 33 | 400 | 104 | 63 | 64 | 1750 |
| 51 | 29 | 30 | 2100 | 105 | 64 | 65 | 1500 |
| 52 | 30 | 31 | 450 | 106 | 65 | 66 | 750 |
| 53 | 30 | 44 | 2500 | 107 | 66 | 67 | 1600 |
| 54 | 31 | 45 | 1750 |
Appendix B
- Step1
- 2.
- Step2
- 3.
- Step3
- 4.
- Step4
- 5.
- Step5
References
- Lv, S.; Wei, Z.; Sun, G.; Chen, S.; Zang, H. Power and traffic nexus: From perspective of power transmission network and electrified highway network. IEEE Trans. Transp. Electrif. 2021, 7, 566–577. [Google Scholar] [CrossRef]
- Hossain, S.; Rokonuzzaman, M.; Rahman, K.S.; Habib, A.K.M.A.; Tan, W.-S.; Mahmud, M.; Chowdhury, S.; Channumsin, S. Grid-Vehicle-Grid (G2V2G) Efficient Power Transmission: An Overview of Concept, Operations, Benefits, Concerns, and Future Challenges. Sustainability 2023, 15, 5782. [Google Scholar] [CrossRef]
- Huang, X.; Wu, D.; Boulet, B. Metaprobformer for charging load probabilistic forecasting of electric vehicle charging stations. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10445–10455. [Google Scholar] [CrossRef]
- Zhao, Z.; Lee, C.K.M.; Ren, J. A two-level charging scheduling method for public electric vehicle charging stations considering heterogeneous demand and nonlinear charging profile. Appl. Energy 2024, 355, 122278. [Google Scholar] [CrossRef]
- He, C.; Zhu, J.; Lan, J.; Li, S.; Wu, W.; Zhu, H. Optimal planning of electric vehicle battery centralized charging station based on EV Load forecasting. IEEE Trans. Ind. Appl. 2022, 58, 6557–6575. [Google Scholar] [CrossRef]
- Sadhukhan, A.; Ahmad, M.S.; Sivasubramani, S. Optimal allocation of EV charging stations in a radial distribution network using probabilistic load modeling. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11376–11385. [Google Scholar] [CrossRef]
- Liu, S.; Fang, C.; Jia, S.; Xiang, Y.; Yang, J. Hierarchical and distributed optimization of distribution network considering spatial and temporal distribution of electric vehicle charging load. Energy Rep. 2023, 9, 308–322. [Google Scholar] [CrossRef]
- Cui, Y.; Hu, Z.; Duan, X. Optimal pricing of public electric vehicle charging stations considering operations of coupled transportation and power systems. IEEE Trans. Smart Grid 2021, 12, 3278–3288. [Google Scholar] [CrossRef]
- Wang, X.; Nie, Y.; Cheng, K.-W.E. Distribution system planning considering stochastic EV penetration and V2G behavior. IEEE Trans. Intell. Transp. Syst. 2020, 21, 149–158. [Google Scholar] [CrossRef]
- Han, X.; Wei, Z.; Hong, Z.; Zhao, S. Ordered charge control considering the uncertainty of charging load of electric vehicles based on Markov chain. Renew. Energy 2020, 161, 419–434. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, X.; Yu, X.; Yun, J.; Zhang, J. Electric Vehicle Participation in Regional Grid Demand Response: Potential Analysis Model and Architecture Planning. Sustainability 2023, 15, 2763. [Google Scholar] [CrossRef]
- Liu, K.; Liu, Y. Stochastic user equilibrium based spatial-temporal distribution prediction of electric vehicle charging load. Appl. Energy 2023, 339, 120943. [Google Scholar] [CrossRef]
- Li, C.; Liao, Y.; Sun, R. Prediction of EV charging load using two-stage time series decomposition and DeepBiLSTM model. IEEE Access 2023, 11, 72925–72941. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Z.; Shen, Z. Data-driven framework for large-scale prediction of charging energy in electric vehicles. Appl. Energy 2021, 282 Pt B, 116175. [Google Scholar] [CrossRef]
- Dokur, E.; Erdogan, N.; Kucuksari, S. EV fleet charging load forecasting based on multiple decomposition with CEEMDAN and swarm decomposition. IEEE Access 2022, 10, 62330–62340. [Google Scholar] [CrossRef]
- Zhang, X.; Chan, K.; Li, H. Deep-Learning-Based probabilistic forecasting of electric vehicle charging load with a novel queuing model. IEEE Trans. Cybern. 2021, 51, 3157–3170. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, Y.; Liao, H.; Liang, Y. A hybrid electric vehicle load classification and forecasting approach based on GBDT algorithm and temporal convolutional network. Appl. Energy 2023, 351, 121768. [Google Scholar] [CrossRef]
- Khan, W.; Somers, W.; Walker, S.; de Bont, K.; Van der Velden, J.; Zeiler, W. Comparison of electric vehicle load forecasting across different spatial levels with incorporated uncertainty estimation. Energy 2023, 283, 129213. [Google Scholar] [CrossRef]
- Cao, Y.; Tang, S.; Li, C.; Zhang, P.; Tan, Y.; Zhang, Z.; Li, J. An optimized EV charging model considering TOU price and SOC curve. IEEE Trans. Smart Grid 2012, 3, 388–393. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Wu, S.; Pang, A. Optimal scheduling strategy for orderly charging and discharging of electric vehicles based on spatio-temporal characteristics. J. Clean. Prod. 2023, 392, 136318. [Google Scholar] [CrossRef]
- Rathor, S.; Saxena, D.; Khadkikar, V. Electric vehicle trip chain information-based hierarchical stochastic energy management with multiple uncertainties. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18492–18501. [Google Scholar] [CrossRef]
- Bian, H.; Guo, Z.; Zhou, C.; Wang, X.; Peng, S.; Zhang, X. Research on orderly charge and discharge strategy of EV based on QPSO algorithm. IEEE Access 2022, 10, 66430–66448. [Google Scholar] [CrossRef]
- Liang, H.; Lee, Z.; Li, G. A calculation model of charge and discharge capacity of electric vehicle cluster based on trip chain. IEEE Access 2020, 8, 142026–142042. [Google Scholar] [CrossRef]
- Tang, D.; Wang, P. Probabilistic modeling of nodal charging demand based on spatial-temporal dynamics of moving electric vehicles. IEEE Trans. Smart Grid 2016, 7, 627–636. [Google Scholar] [CrossRef]
- Cheng, S.; Wei, Z.; Shang, D.; Zhao, Z.; Chen, H. Charging load prediction and distribution network reliability evaluation considering electric vehicles’ spatial-temporal transfer randomness. IEEE Access 2020, 8, 124084–124096. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, J.; Liu, Y.; Lv, G.; Han, S.; Alfonzo, I.E.G. EV charging load simulation and forecasting considering traffic jam and weather to support the integration of renewables and EVs. Renew. Energy 2020, 159, 623–641. [Google Scholar] [CrossRef]
- Guo, Z.; Bian, H.; Zhou, C.; Ren, Q.; Gao, Y. An electric vehicle charging load prediction model for different functional areas based on multithreaded acceleration. J. Energy Storage 2023, 73 Pt A, 108921. [Google Scholar] [CrossRef]
- Shi, X.; Xu, Y.; Guo, Q.; Sun, H.; Gu, W. A distributed EV navigation strategy considering the interaction between power system and traffic network. IEEE Trans. Smart Grid 2020, 11, 3545–3557. [Google Scholar] [CrossRef]
- Long, X.; Yang, J.; Wu, F.; Zhan, X.; Lin, Y.; Xu, J. Prediction of electric vehicle charging load considering interaction between road network and power grid and user’s psychology. Autom. Electr. Power Syst. 2020, 44, 86–93. [Google Scholar] [CrossRef]
- U.S. Department of Transportation, Federal Highway Administration. 2017 National Household Travel Survey. Available online: http://nhts.ornl.gov (accessed on 29 April 2019).
- Pareschi, G.; Küng, L.; Georges, G.; Boulouchos, K. Are travel surveys a good basis for EV models? Validation of simulated charging profiles against empirical data. Appl. Energy 2020, 275, 115318. [Google Scholar] [CrossRef]
- Yang, L.; Shen, Q.; Li, Z. Comparing travel mode and trip chain choices between holidays and weekdays. Transp. Res. Part A Policy Pract. 2016, 91, 273–285. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, L.; Lv, Y. Lane changing rules based on cellular automation traffic flow model. China J. Highw. Transp. 2008, 89, 89–93. [Google Scholar] [CrossRef]
- TRB. Highway Capacity Manual; TRB: Washington, DC, USA, 1985. [Google Scholar]
- Tu, Q.; Cheng, L.; Yuan, T.; Cheng, Y.; Li, M. The constrained reliable shortest path problem for electric vehicles in the urban transportation network. J. Clean. Prod. 2020, 261, 121130. [Google Scholar] [CrossRef]
- Åkerblom, N.; Chen, Y.; Chehreghani, M.H. Online learning of energy consumption for navigation of electric vehicles. Artif. Intell. 2023, 317, 103879. [Google Scholar] [CrossRef]
- Yuan, Q.; Ye, Y.; Tang, Y.; Liu, X.; Tian, Q. Low carbon electric vehicle charging coordination in coupled transportation and power networks. IEEE Trans. Ind. Appl. 2023, 59, 2162–2172. [Google Scholar] [CrossRef]
- Zhong, J.; Liu, J.; Zhang, X. Charging navigation strategy for electric vehicles considering empty-loading ratio and dynamic electricity price. Sustain. Energy Grids Netw. 2023, 34, 100987. [Google Scholar] [CrossRef]
- Chen, M.; Li, F.; Lin, Q. Random regret minimization model for variable destination-oriented path planning. IEEE Access 2020, 8, 163646–163659. [Google Scholar] [CrossRef]
- Zhang, A.; Zhang, Y.; Liu, Y. Low-carbon cold-chain logistics path optimization problem considering the influence of road impedance. IEEE Access 2023, 11, 124055–124067. [Google Scholar] [CrossRef]
- Lu, L.; Su, T.; Gao, Y.; Qin, F.; Pan, M. FCDT-IWBOA-LSSVR: An innovative hybrid machine learning approach for efficient prediction of short-to-mid-term photovoltaic generation. J. Clean. Prod. 2023, 385, 135716. [Google Scholar] [CrossRef]






| Paper | A | B | C | D | E | F | G | H | I | J |
|---|---|---|---|---|---|---|---|---|---|---|
| [12] | △ | × | × | √ | √ | Graph-theoretic | 15 min | 5 | √ | √ |
| [19] | × | × | × | × | × | × | 1 h | × | × | × |
| [20] | × | × | × | × | × | × | 30 min | 3 | × | × |
| [21] | √ | × | × | △ | × | × | 1 h | 3 | × | × |
| [22] | × | × | × | △ | × | × | 1 h | 3 | × | × |
| [23] | × | × | × | △ | △ | Graph-theoretic | 15 min | 5 | × | × |
| [24] | × | × | × | △ | × | × | 20 min | 6 | × | × |
| [25] | × | × | × | △ | △ | Graph-theoretic | 30 min | 3 | × | × |
| [26] | √ | × | √ | △ | △ | Graph-theoretic | 15 min | 5 | × | × |
| [27] | × | × | √ | △ | × | × | 1 min | 3 | × | × |
| [28] | △ | × | √ | √ | √ | Graph-theoretic | 1 min | 8 | √ | × |
| [29] | × | √ | × | √ | √ | Graph-theoretic | 1 min | × | × | √ |
| [30] | √ | √ | △ | △ | √ | Following model | 5 s | 3 | × | √ |
| This paper | √ | √ | √ | √ | √ | STCA-II model | 1 s | 8 | √ | √ |
| Functional Area | Percentage (%) |
|---|---|
| Residential area | 93.413 |
| Work area | 2.502 |
| Shopping area | 0.325 |
| Hospital | 0.158 |
| Station | 0.182 |
| Recreation area | 2.555 |
| Restaurant area | 0.075 |
| School | 0.790 |
| Bus | Area | Bus | Area | Bus | Area |
|---|---|---|---|---|---|
| 1 | 4 | 12 | 9 | 23 | 30,31 |
| 2 | 3 | 13 | 6 | 24 | 36 |
| 3 | 18 | 14 | 5 | 25 | 37 |
| 4 | 19 | 15 | 7 | 26 | 32 |
| 5 | 23 | 16 | 10 | 27 | 38 |
| 6 | 24,28 | 17 | 13 | 28 | 25 |
| 7 | 20,21 | 18 | 15 | 29 | 26 |
| 8 | 22 | 19 | 1,2 | 30 | 27,33 |
| 9 | 12,14 | 20 | 16,17 | 31 | 40,41 |
| 10 | 11 | 21 | 29 | 32 | 34 |
| 11 | 8 | 22 | 35 | 33 | 39 |
| Charging Station | Area | Road | Location (Node, Node, Distance/m) | Charging Power (kW) | Number of Charging Piles | Parking Fee (CNY/Half Hour, Less Than Half an Hour Will Be Calculated as Half an Hour) |
|---|---|---|---|---|---|---|
| 1 | 4 | 6 | (22,3,1000) | 30 | 50 | 2.5 |
| 2 | 23 | 62 | (36,37,400) | 30 | 30 | 3.5 |
| 3 | 26 | 53 | (30,44,1200) | 30 | 30 | 3 |
| 4 | 29 | 61 | (35,39,1600) | 30 | 20 | 3.5 |
| 5 | 38 | 84 | (55,50,200) | 30 | 40 | 3 |
| Performance Metrics | Total Charging Load | Charging Load of Electric Private Cars | Charging Load of Electric Taxis |
|---|---|---|---|
| RMSE | 710.568 1 | 243.953 1 | 625.321 9 |
| MAE | 649.224 3 | 207.934 5 | 563.073 2 |
| Method | EV Type | Average Daily Charging Cost (CNY) | Average Daily Number of Charges | Average Daily Charging Capacity (kWh) | Average Daily Parking Cost (CNY) |
|---|---|---|---|---|---|
| Proposed method | Electric private car | 5.987 | 0.431 5 | 5.301 5 | 0 |
| Electric taxi | 82.148 | 2.024 | 75.524 2 | 17.154 | |
| Graph-theoretic method | Electric private car | 5.621 2 | 0.404 5 | 4.981 0 | 0 |
| Electric taxi | 77.359 | 1.92 | 71.436 5 | 16.221 4 |
| Time | Bus 6 | Bus 10 | Bus 16 | Bus 31 | Bus 32 | Bus 33 |
|---|---|---|---|---|---|---|
| 01:00 | 0.012 090 | 0.013 570 | 0.014 090 | 0.019 610 | 0.019 830 | 0.020 030 |
| 02:00 | 0.013 420 | 0.015 040 | 0.015 660 | 0.021 530 | 0.021 760 | 0.021 920 |
| 03:00 | 0.012 150 | 0.013 550 | 0.014 090 | 0.019 660 | 0.019 870 | 0.020 040 |
| 04:00 | 0.010 900 | 0.012 210 | 0.012 720 | 0.017 630 | 0.017 810 | 0.017 980 |
| 05:00 | 0.009 800 | 0.010 730 | 0.011 100 | 0.015 780 | 0.015 912 | 0.016 030 |
| 06:00 | 0.007 540 | 0.008 120 | 0.008 440 | 0.012 200 | 0.012 300 | 0.012 370 |
| 07:00 | 0.006 050 | 0.006 540 | 0.006 730 | 0.009 820 | 0.009 900 | 0.009 980 |
| 08:00 | 0.006 512 | 0.006 700 | 0.007 220 | 0.010 430 | 0.010 510 | 0.010 570 |
| 09:00 | 0.006 810 | 0.007 310 | 0.007 519 | 0.010 650 | 0.010 730 | 0.010 790 |
| 10:00 | 0.007 050 | 0.007 700 | 0.007 950 | 0.010 840 | 0.010 920 | 0.010 980 |
| 11:00 | 0.006 550 | 0.007 330 | 0.007 639 | 0.009 790 | 0.009 890 | 0.009 970 |
| 12:00 | 0.005 980 | 0.006 780 | 0.007 090 | 0.008 980 | 0.009 110 | 0.009 230 |
| 13:00 | 0.008 840 | 0.009 900 | 0.010 360 | 0.013 570 | 0.013 720 | 0.013 860 |
| 14:00 | 0.012 030 | 0.013 540 | 0.014 150 | 0.018 340 | 0.018 540 | 0.018 710 |
| 15:00 | 0.011 960 | 0.013 600 | 0.014 270 | 0.018 480 | 0.018 730 | 0.018 930 |
| 16:00 | 0.012 310 | 0.013 910 | 0.014 570 | 0.019 290 | 0.019 520 | 0.019 720 |
| 17:00 | 0.013 780 | 0.015 550 | 0.016 240 | 0.022 440 | 0.022 740 | 0.022 980 |
| 18:00 | 0.012 860 | 0.014 640 | 0.015310 | 0.021 000 | 0.021 300 | 0.021 530 |
| 19:00 | 0.011 470 | 0.013 410 | 0.014 150 | 0.018 280 | 0.018 570 | 0.018 800 |
| 20:00 | 0.012 860 | 0.014 860 | 0.015 580 | 0.019 750 | 0.020 050 | 0.020 280 |
| 21:00 | 0.014 730 | 0.016 940 | 0.017 860 | 0.022 450 | 0.022 740 | 0.022 930 |
| 22:00 | 0.015 510 | 0.017 450 | 0.018 200 | 0.023 610 | 0.023 890 | 0.024 070 |
| 23:00 | 0.013 150 | 0.014 840 | 0.015 470 | 0.020 510 | 0.020 770 | 0.020 950 |
| 24:00 | 0.011 350 | 0.012 850 | 0.013 420 | 0.018 190 | 0.018 430 | 0.018 640 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, H.; Ren, Q.; Guo, Z.; Zhou, C.; Zhang, Z.; Wang, X. Predictive Model for EV Charging Load Incorporating Multimodal Travel Behavior and Microscopic Traffic Simulation. Energies 2024, 17, 2606. https://doi.org/10.3390/en17112606
Bian H, Ren Q, Guo Z, Zhou C, Zhang Z, Wang X. Predictive Model for EV Charging Load Incorporating Multimodal Travel Behavior and Microscopic Traffic Simulation. Energies. 2024; 17(11):2606. https://doi.org/10.3390/en17112606
Chicago/Turabian StyleBian, Haihong, Quance Ren, Zhengyang Guo, Chengang Zhou, Zhiyuan Zhang, and Ximeng Wang. 2024. "Predictive Model for EV Charging Load Incorporating Multimodal Travel Behavior and Microscopic Traffic Simulation" Energies 17, no. 11: 2606. https://doi.org/10.3390/en17112606
APA StyleBian, H., Ren, Q., Guo, Z., Zhou, C., Zhang, Z., & Wang, X. (2024). Predictive Model for EV Charging Load Incorporating Multimodal Travel Behavior and Microscopic Traffic Simulation. Energies, 17(11), 2606. https://doi.org/10.3390/en17112606