
Implementation of a Microgrid System with a Four-Phase Inductor Coupled Interleaved Boost Converter for EV Charging Stations

 , ,
, , 
Abstract
1. Introduction
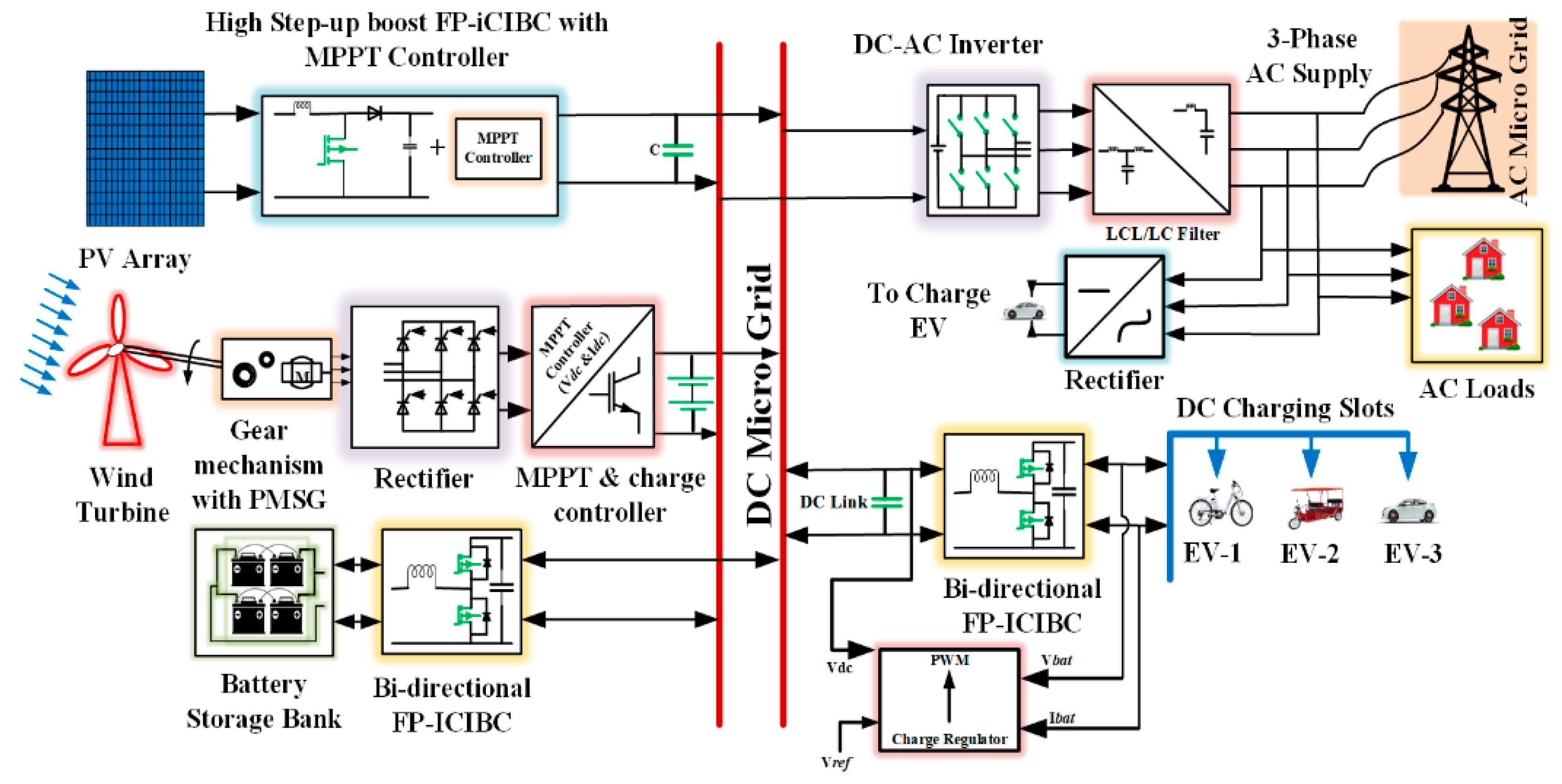
2. Proposed System Configuration
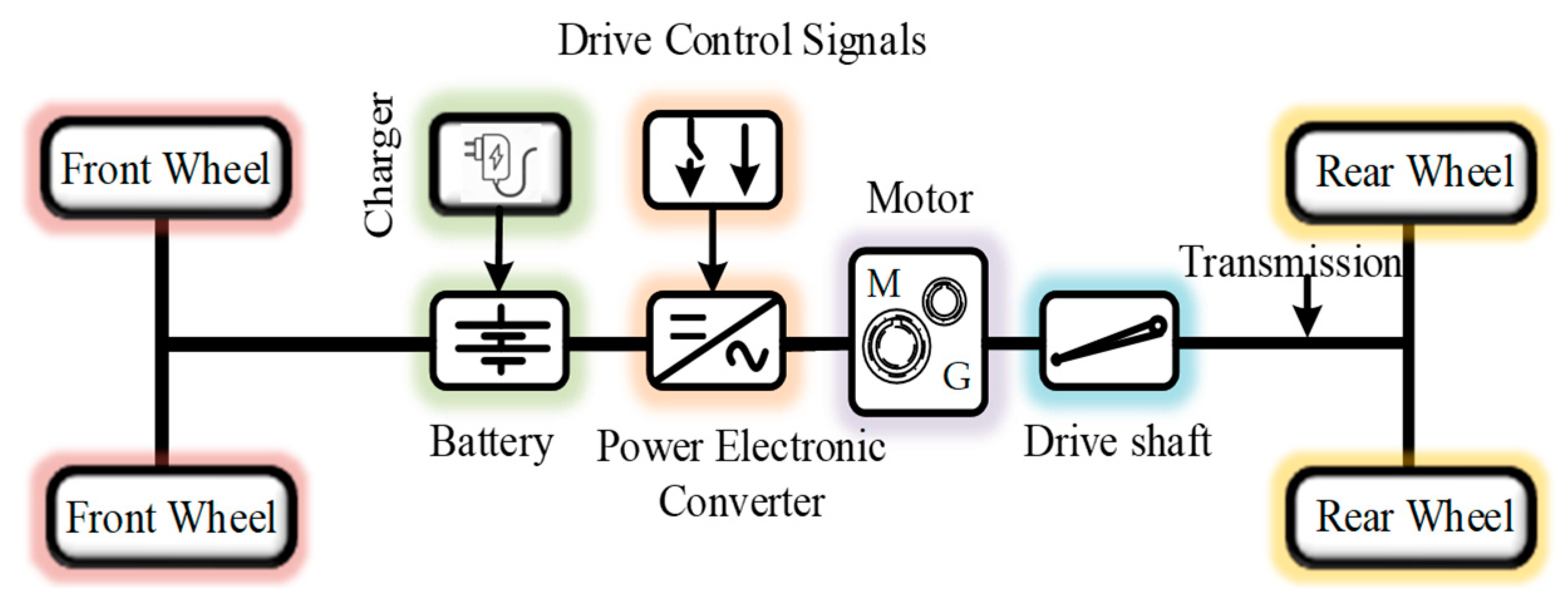
2.1. EV Structure
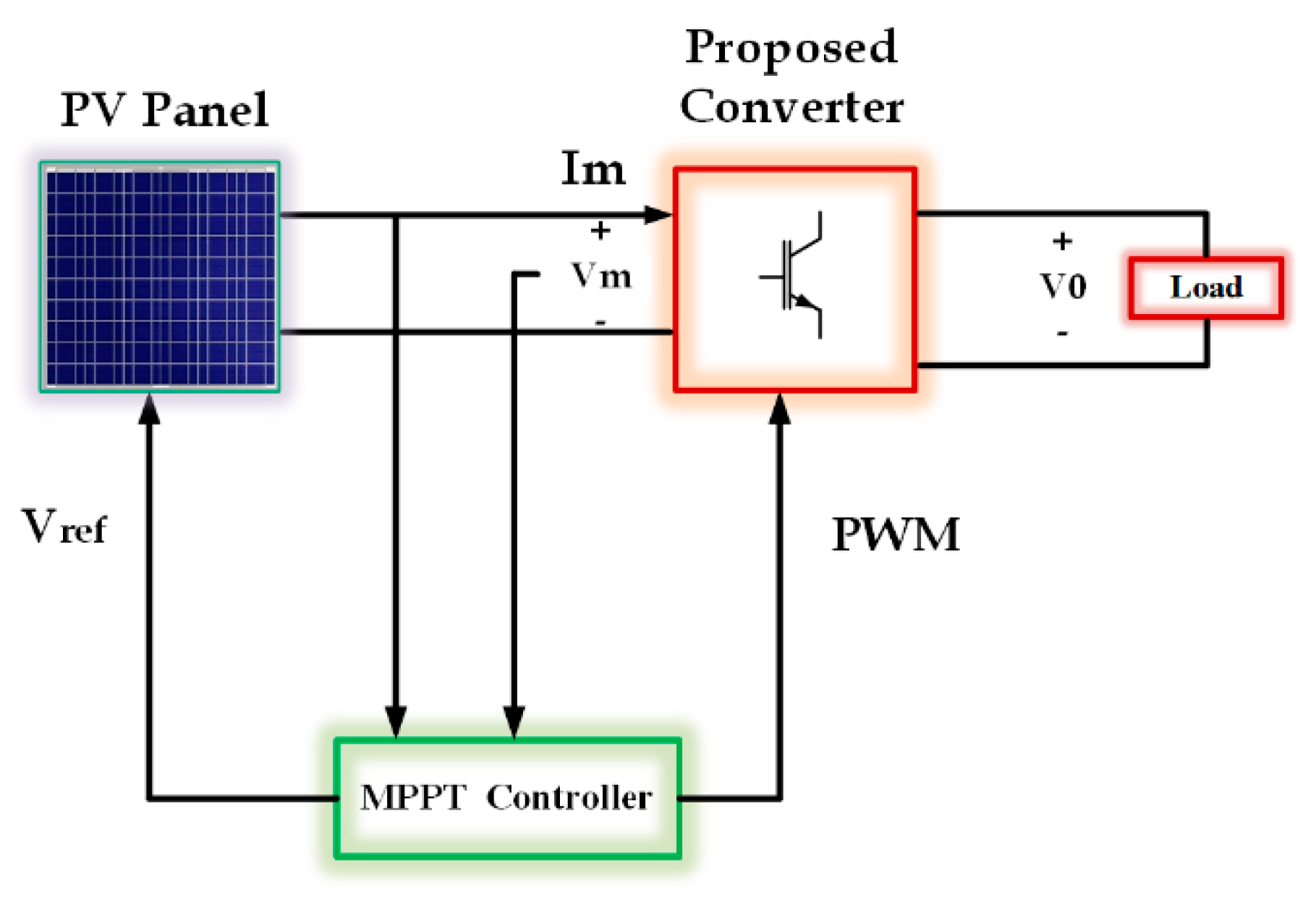
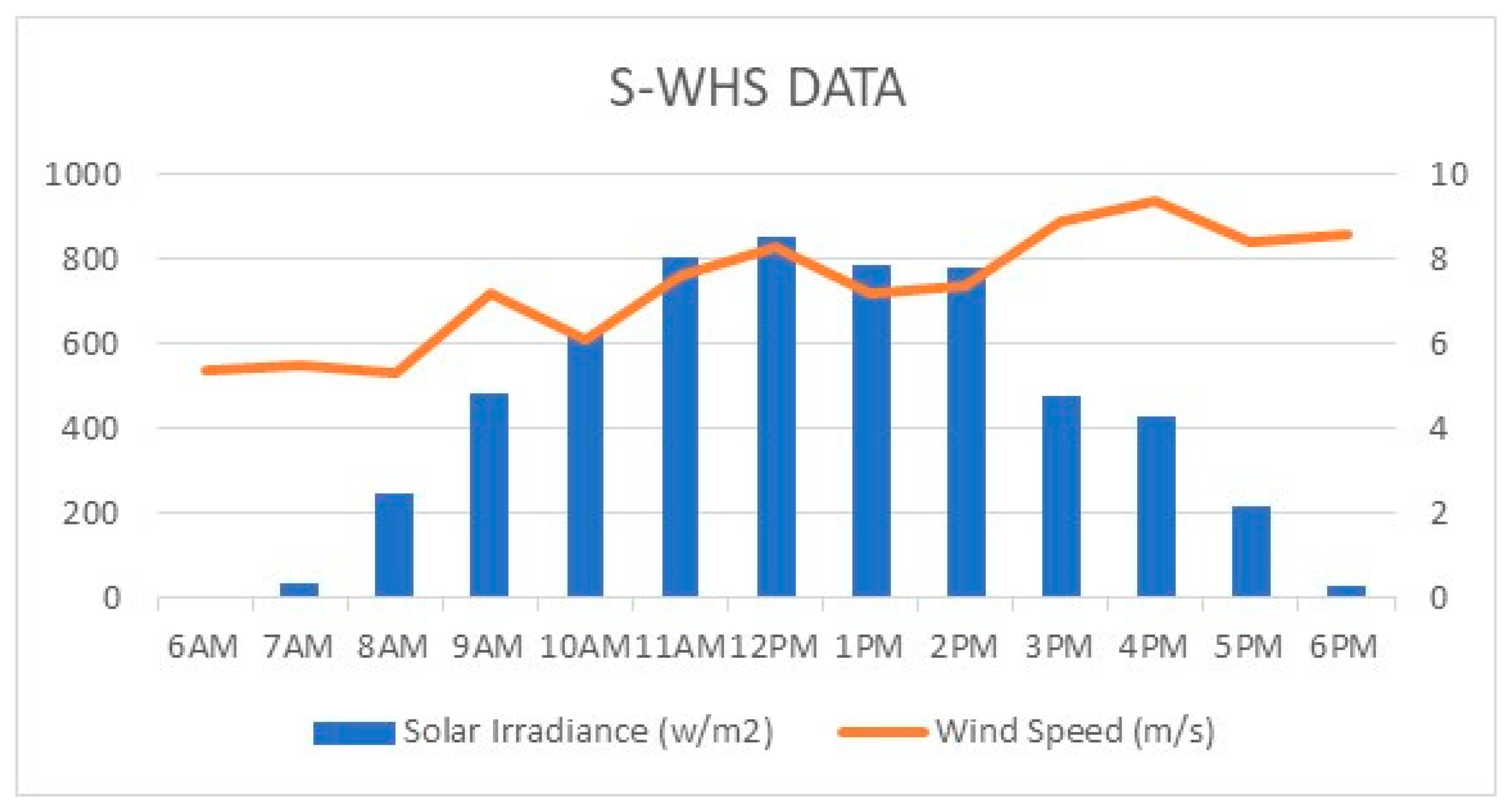
2.2. PV Solar System
2.3. Wind Energy System
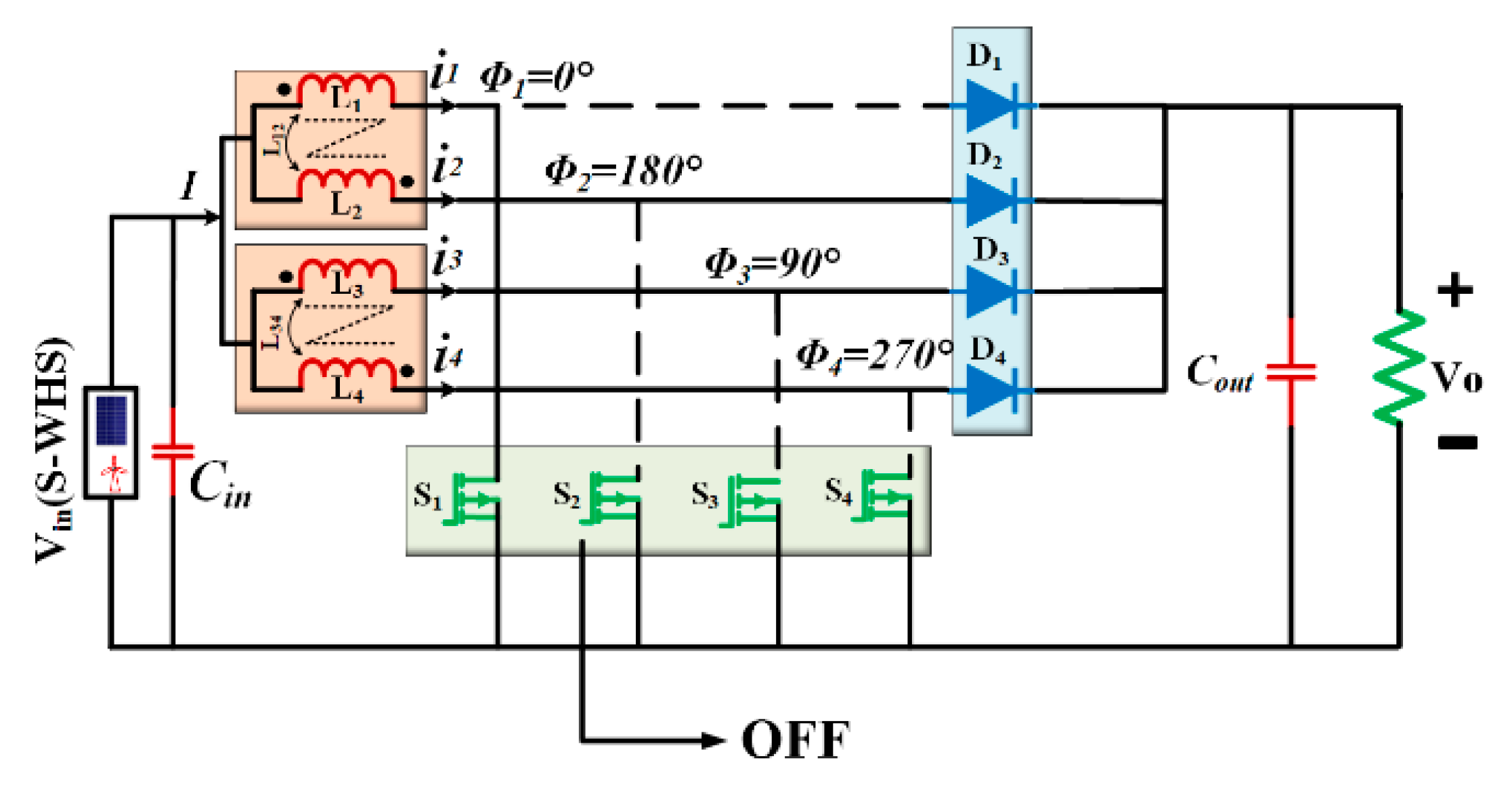
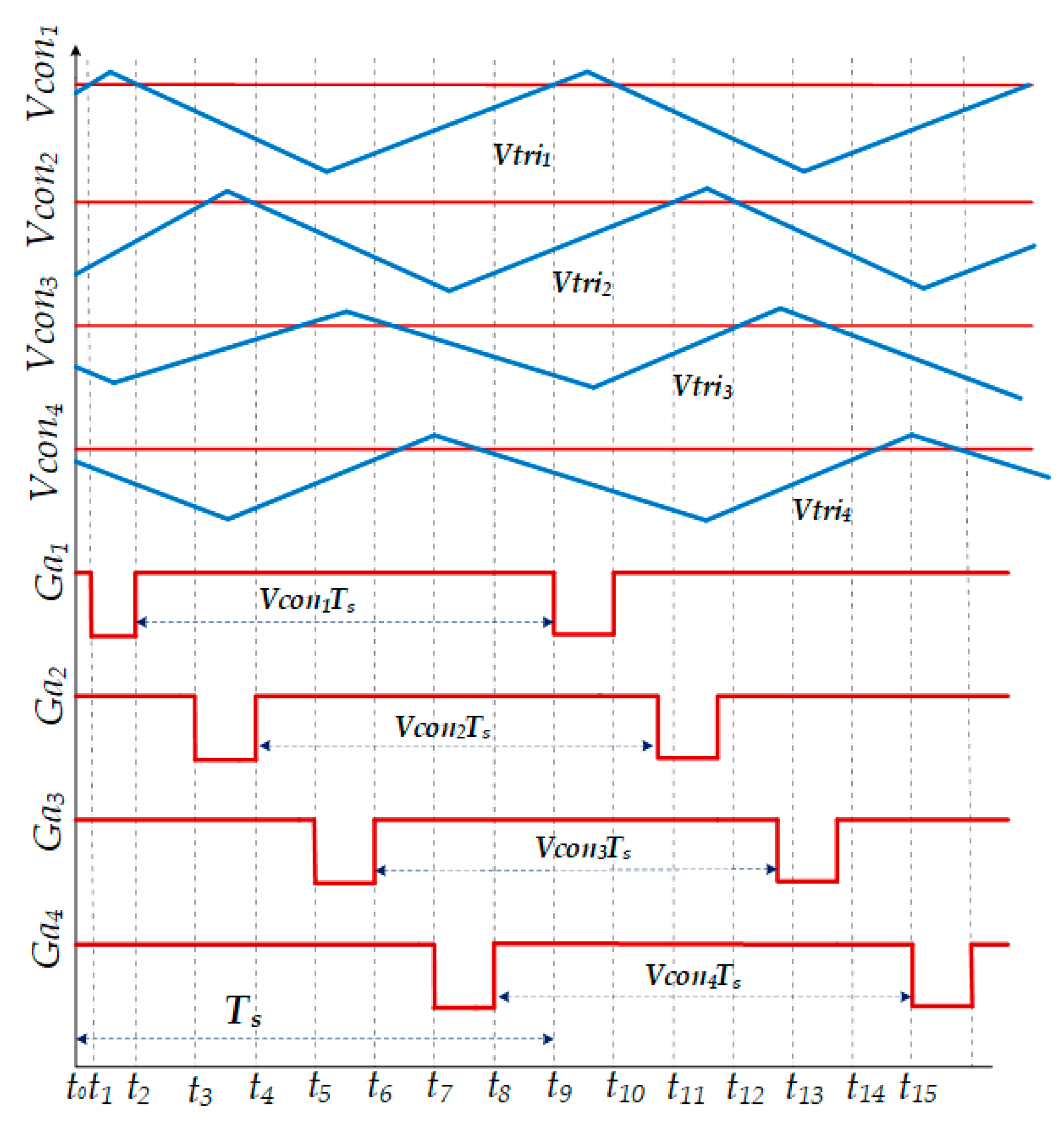
3. Design Structure for Proposed Four-Phase Inductor Coupled Interleaved Boost Converter (FP-ICIBC) and Its Control Strategy
- Case 1: S1 is ON (M1000) and other switches are OFF.
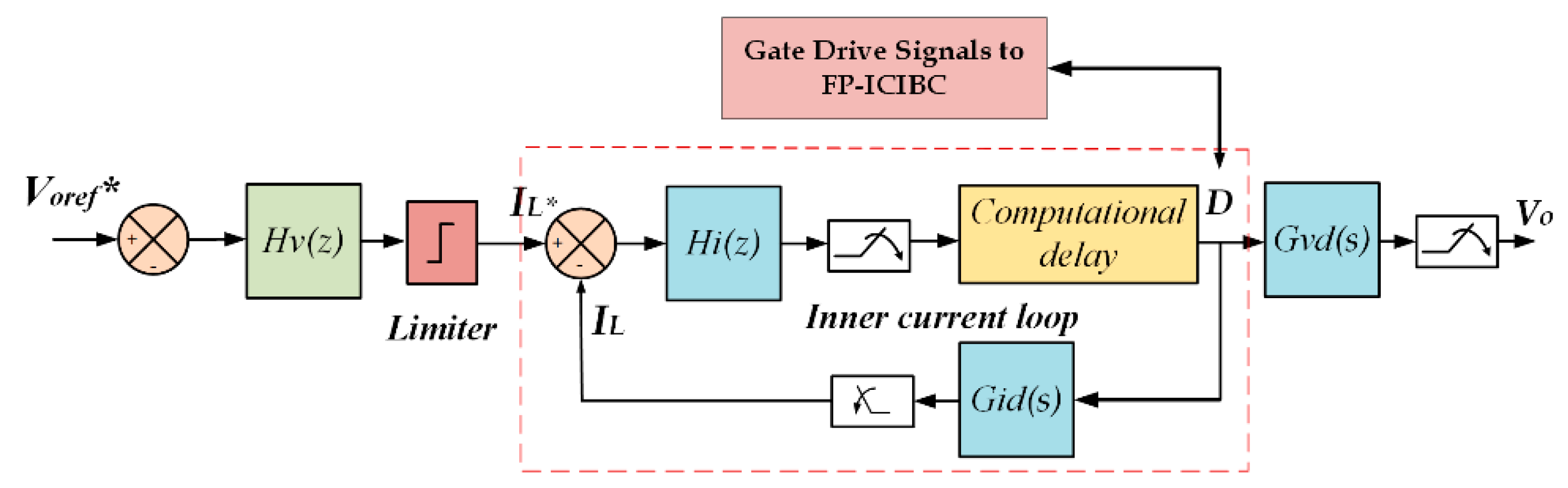
Digital 2PI Controller for FP-ICIBC
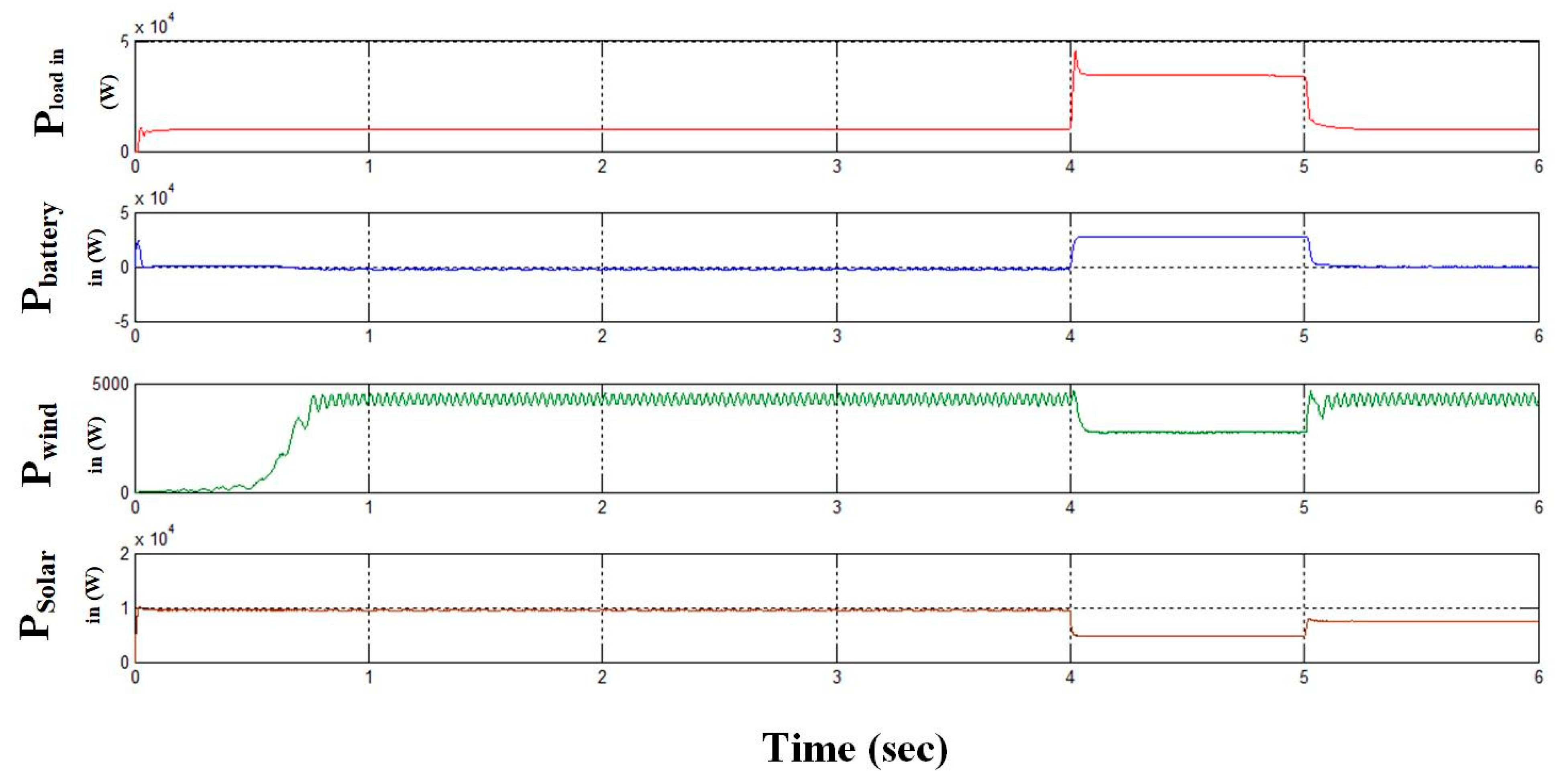
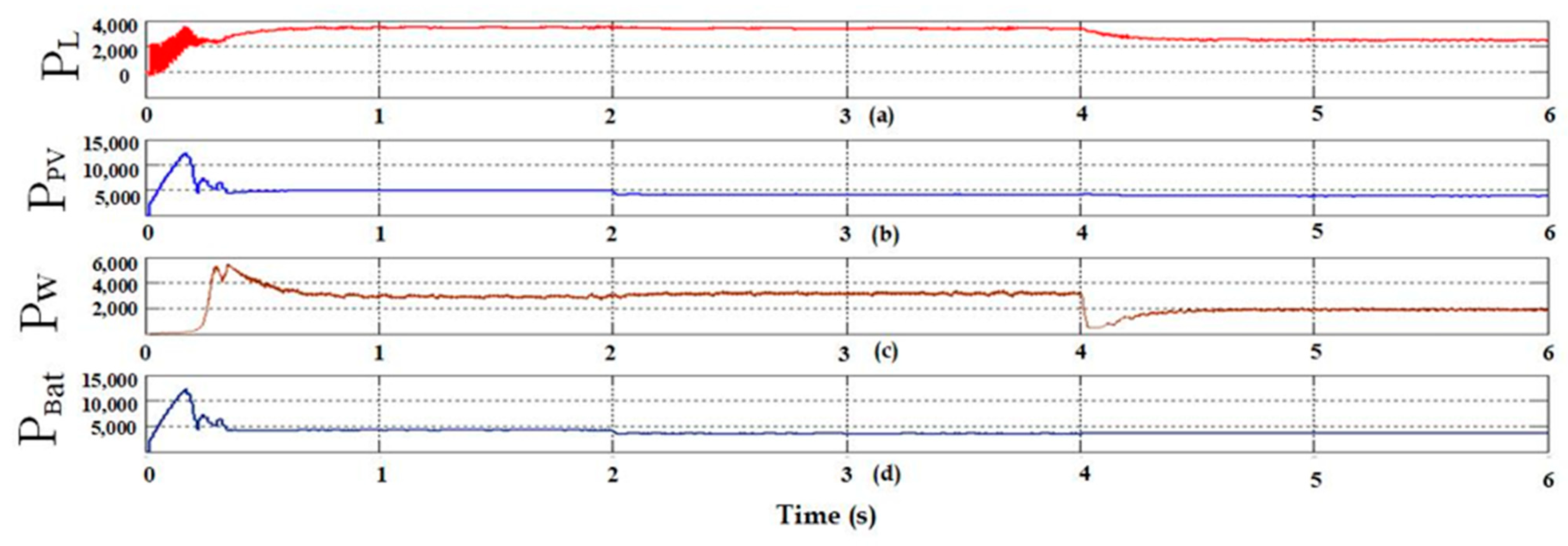
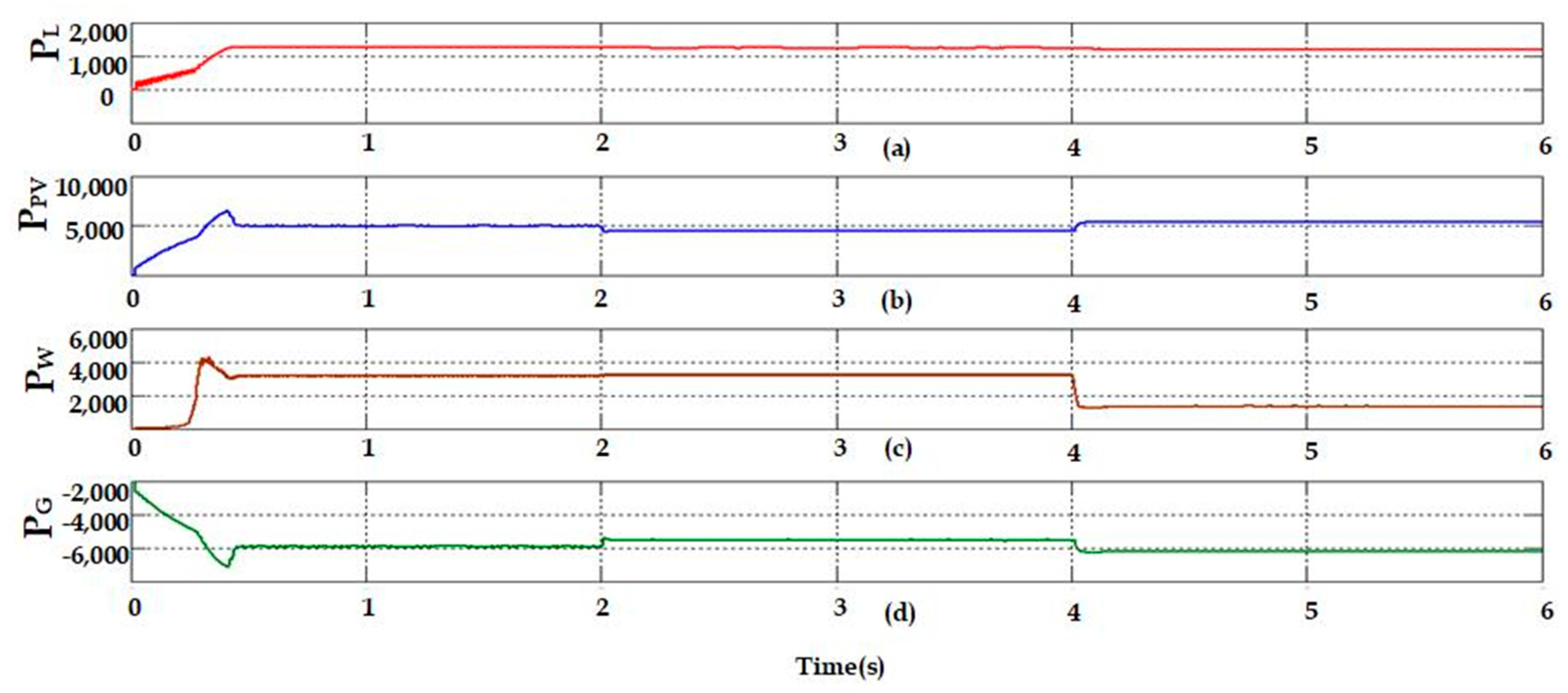
4. Power Management of Proposed Hybrid System and Simulation Analysis
4.1. Case Studies for Different Load Conditions
- Case 1: analysis of S-WHS without load sharing.
- Case 2: analysis of S-WHS with load sharing (S-WHS > Grid).
- Case 3: analysis of S-WHS with load sharing (S-WHS < Grid).
4.1.1. Analysis of Proposed Hybrid System Operated to Charge Two-Wheeler Electric Bike System
4.1.2. Analysis of Proposed Hybrid System Operated to Charge Four-Wheeler Electric Car System
4.1.3. Analysis of Proposed Hybrid System Operated to Charge Multiple Vehicles at a Time
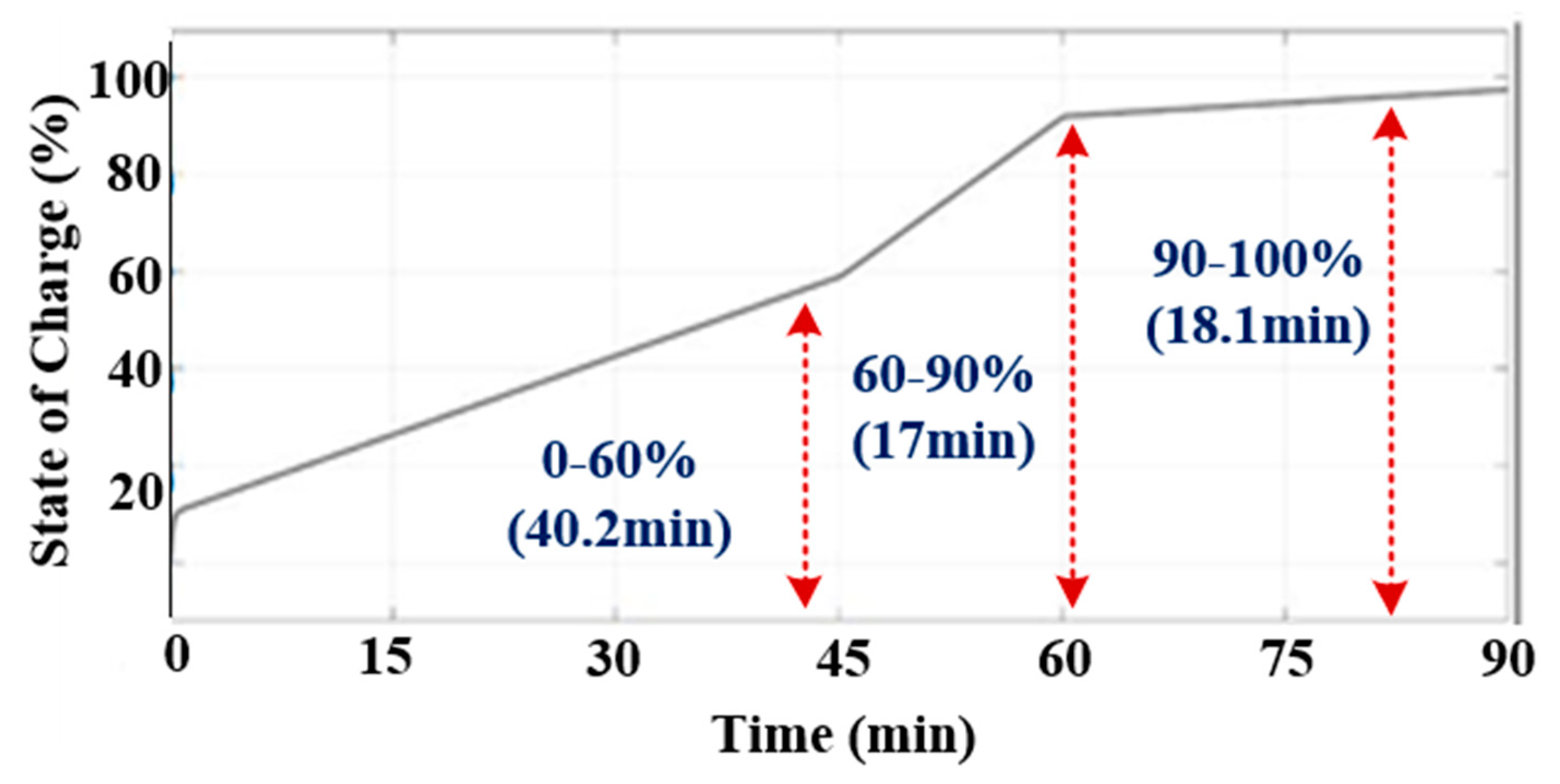
4.2. Mathematical Model Analysis for EV Charging Rate
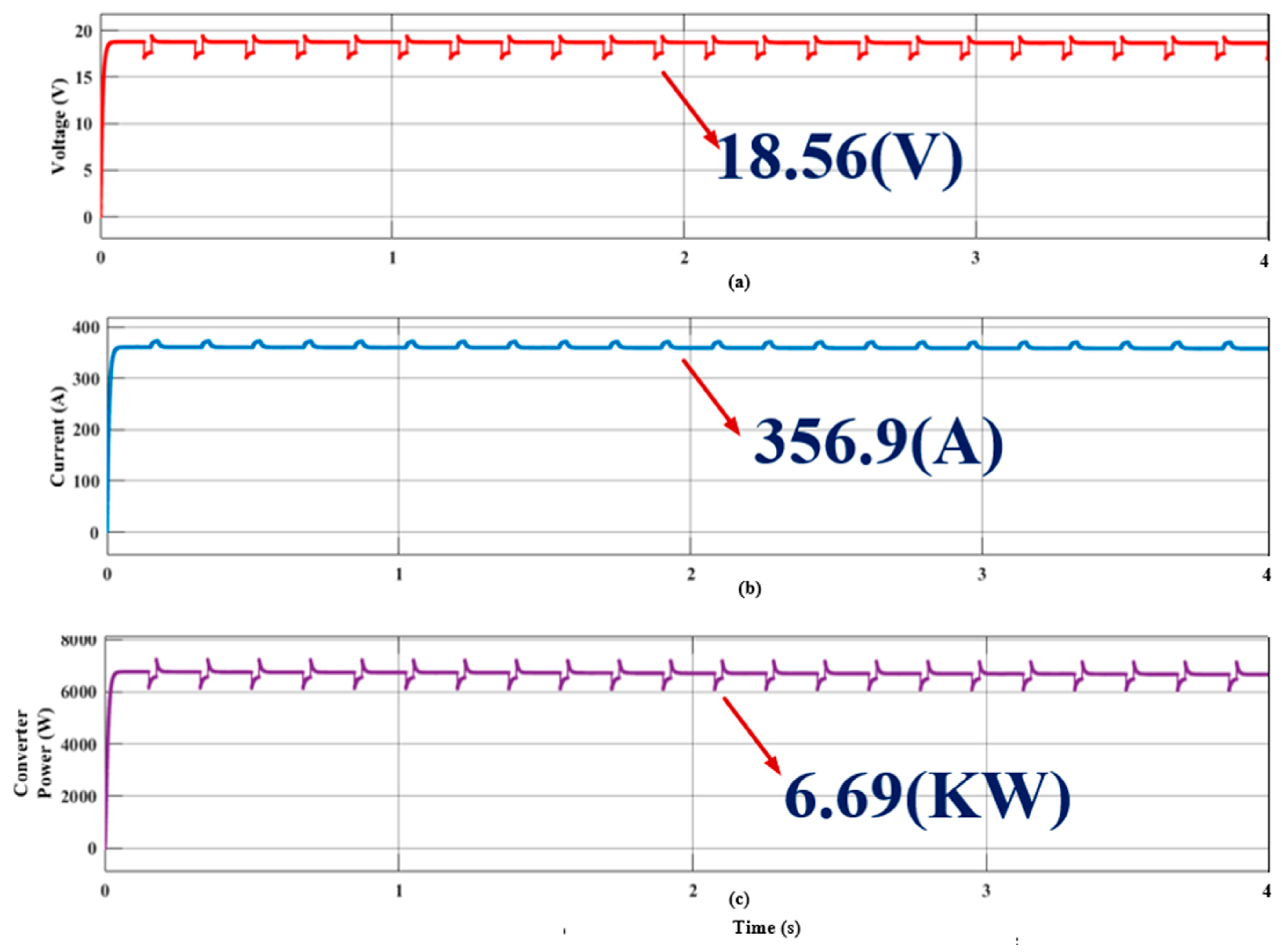
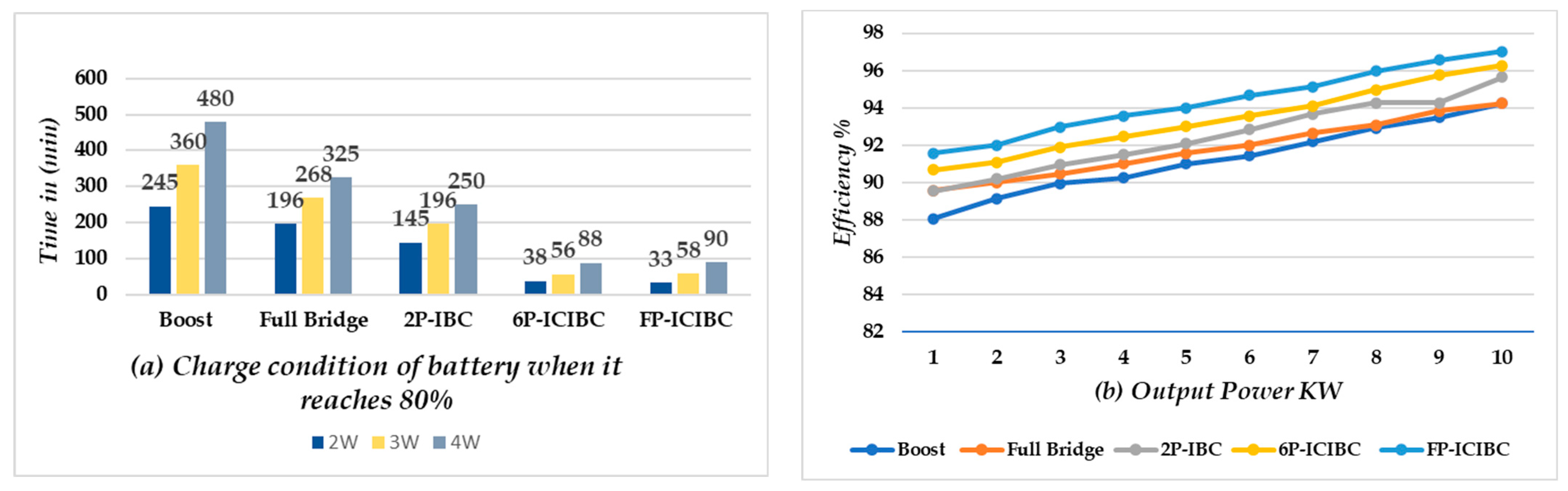
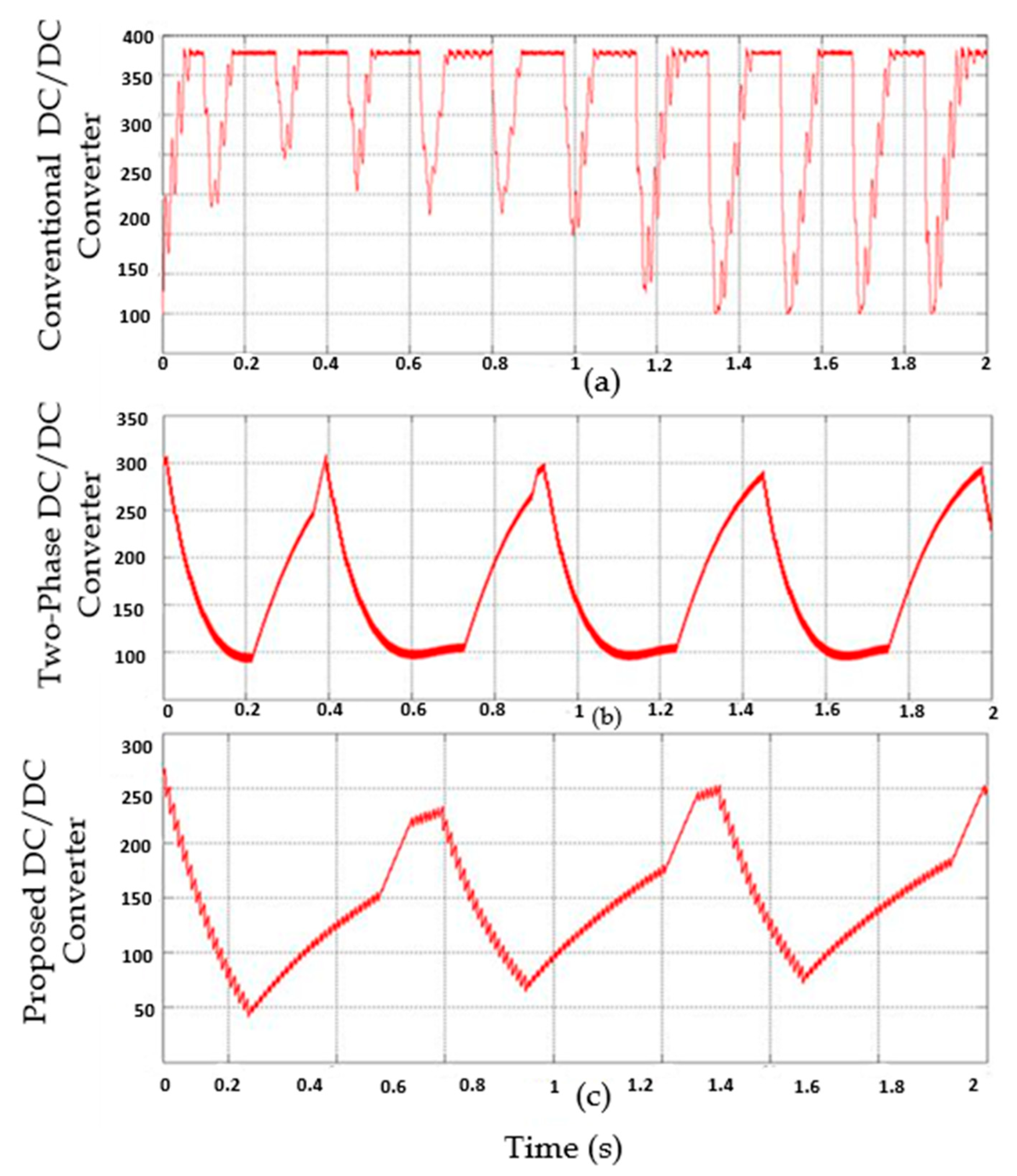
4.3. Performance Analysis of Proposed FP-ICIBC under Voltage Ripples
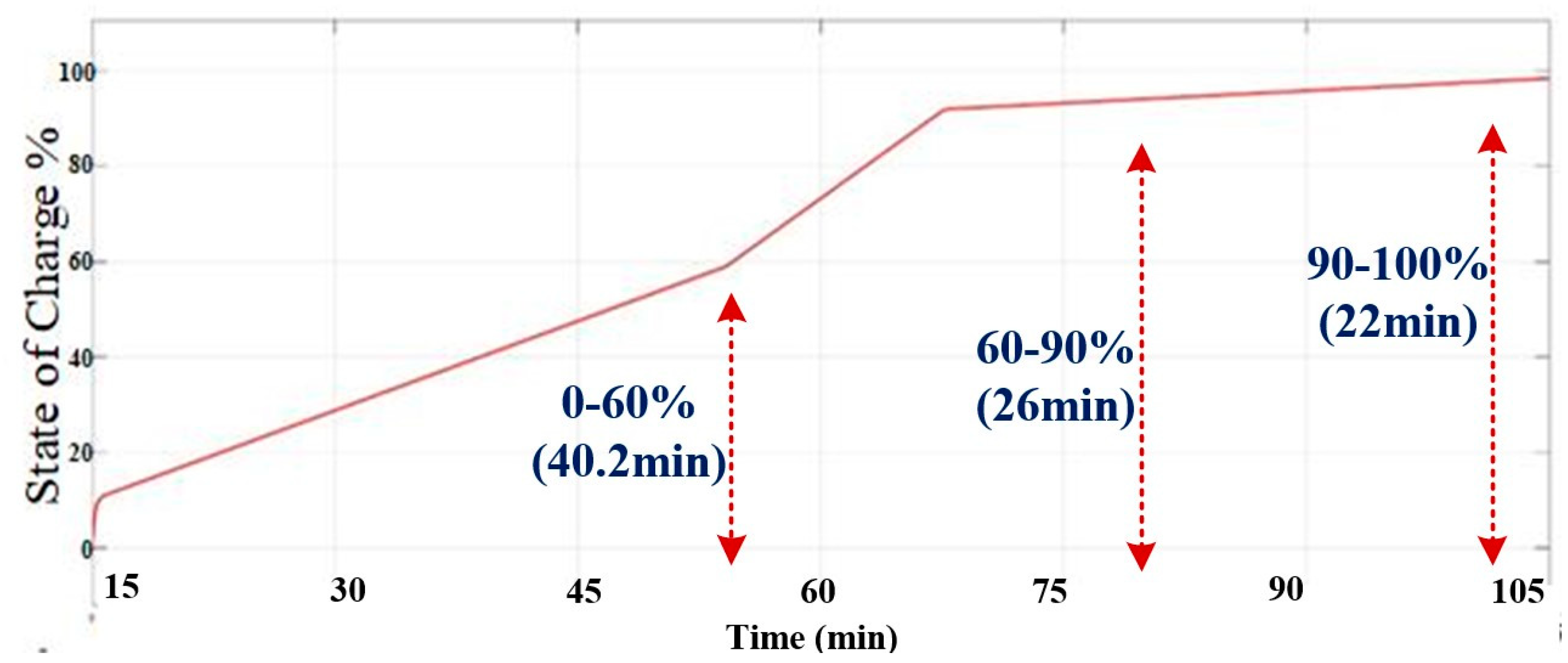
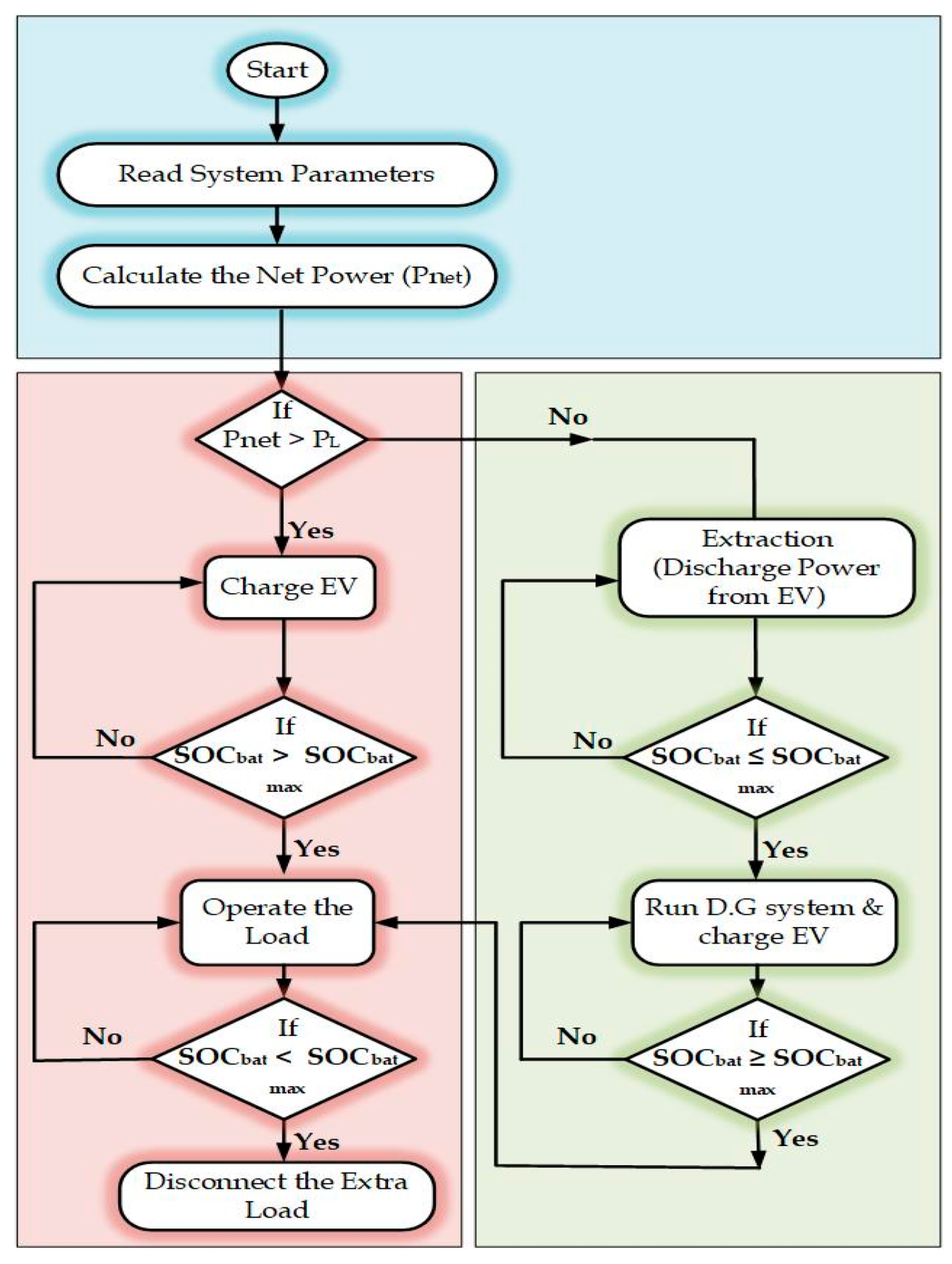
4.4. Procedure Followed to Charge an EV (Buffering)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| AC/DC | Alternating Current/Direct Current |
| AMM | Amorphous Magnetic Materials |
| CBC | Conventional Boost Converter |
| Cin/Cout | Input/Output Capacitors |
| CO2 | Carbon dioxide |
| CS | Charging Stations |
| D | Duty cycle |
| DC | Direct Current |
| DTC | Direct Torque Control |
| EMI | Electromagnetic Interference |
| EV | Electric Vehicles |
| EVCS | Electric Vehicle Charging Stations |
| FC | Fuel Cell |
| Fsw | Switching Frequency |
| GHG | Green House Gas |
| Gi/Gv | Gate current/voltages |
| Current/Change in current/Change in Current peak to peak | |
| IBC | Interleaved Boost Converter |
| ICE | Internal Combustion Engines |
| I2R | Power loss |
| K | coupling coefficient |
| Kp/Ki | Proportional/Integral gain |
| Ls/Leq/LM | Self-Inductance/Equivalent Inductance/Mutual Inductance |
| MPPT | Maximum Power Point Tracking |
| NFR | Nanocrystalline Flake Ribbon |
| NPC | Neutral Point Clamped |
| PI | Proportional Integral |
| PV | Photovoltaic |
| Pout | Output Power |
| PQ | Power Quality |
| PWM | Pulse Width Modulation |
| RES | Renewable Energy Sources |
| S | Switch |
| SoC | State of Charge |
| SPV | Solar Photovoltaic |
| S-WHS | Solar Wind Hybrid Systems |
| Ts | Switching time |
| R/L/C | Resistance/Inductance/Capacitance |
| Vin/Vout/Vref | Input/Output Voltage/reference Voltage |
| ZOH | Zero-order Hold |
| Change in Voltage | |
| η | Efficiency |
References
- Ye, H.; Jin, G.; Fei, W.; Ghadimi, N. Energy Sources, Part A: Recovery, Utilization, and Environmental Effects; Taylor & Francis: New York, NY, USA, 2020; pp. 1556–7036. [Google Scholar]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric Vehicles Charging Technology Review and Optimal Size Estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Singh, S.A.; Carli, G.; Azeez, N.A.; Williamson, S.S. Modeling, Design, Control, and Implementation of a Modified Z-Source Integrated PV/Grid/EV DC Charger/Inverter. IEEE Trans. Ind. Electron. 2017, 65, 5213–5220. [Google Scholar] [CrossRef]
- Singh, S.; Chauhan, P.; Singh, N.J. Feasibility of Grid-connected Solar-wind Hybrid System with Electric Vehicle Charging Station. J. Mod. Power Syst. Clean Energy 2021, 9, 295–306. [Google Scholar] [CrossRef]
- Rivera, S.; Kouro, S.; Wu, B. Charging Architectures for Electric and Plug-In Hybrid Electric Vehicles. In Technologies and Applications for Smart Charging of Electric and Plug-in Hybrid Vehicles; Veneri, O., Ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Alghaythi, M.L.; O’Connell, R.M.; Islam, N.E.; Khan, M.M.S.; Guerrero, J.M. A High Step-Up Interleaved DC-DC Converter with Voltage Multiplier and Coupled Inductors for Renewable Energy Systems. IEEE Access 2020, 8, 123165–123174. [Google Scholar] [CrossRef]
- Mirzaei, M.; Keypour, R.; Savaghebi, M.; Golalipour, K. Probabilistic Optimal Bi-level Scheduling of a Multi-Microgrid System with Electric Vehicles. J. Electr. Eng. Technol. 2020, 15, 2421–2436. [Google Scholar] [CrossRef]
- Prem, P.; Sivaraman, P.; Raj, J.S.S.S.; Sathik, M.J.; Almakhles, D. Fast charging converter and control algorithm for solar PV battery and electrical grid integrated electric vehicle charging station. Automatika 2020, 61, 614–625. [Google Scholar] [CrossRef]
- Khosroshahi, A.; Abapour, M.; Sabahi, M. Reliability Evaluation of Conventional and Interleaved DC–DC Boost Converters. IEEE Trans. Power Electron. 2015, 30, 5821–5828. [Google Scholar] [CrossRef]
- Mou, X.; Zhao, R.; Gladwin, D.T. Vehicle-to-Vehicle charging system fundamental and design comparison. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia, 13–15 February 2019; pp. 1628–1633. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B.; Kouro, S.; Yaramasu, V.; Wang, J. Electric Vehicle Charging Station Using a Neutral Point Clamped Converter with Bipolar DC Bus. IEEE Trans. Ind. Electron. 2014, 62, 1999–2009. [Google Scholar] [CrossRef]
- Wen, H.; Su, B. Practical Implementation of an Interleaved Boost Converter for Electric Vehicle Applications. J. Power Electron. 2015, 15, 1035–1046. [Google Scholar] [CrossRef]
- Kosai, H.; McNeal, S.; Jordan, B.; Scofield, J.; Ray, B.; Turgut, Z. Coupled Inductor Characterization for a High Performance Interleaved Boost Converter. IEEE Trans. Magn. 2009, 45, 4812–4815. [Google Scholar] [CrossRef]
- Smith, N.; McCann, R. Analysis and simulation of a multiple input interleaved boost converter for renewable energy applications. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–7. [Google Scholar]
- Pavlovsky, M.; Guidi, G.; Kawamura, A. Assessment of Coupled and Independent Phase Designs of Interleaved Multiphase Buck/Boost DC–DC Converter for EV Power Train. IEEE Trans. Power Electron. 2013, 29, 2693–2704. [Google Scholar] [CrossRef]
- Martinez, W.; Yamamoto, M.; Imaoka, J.; Velandia, F.; Cortes, C.A. Efficiency optimization of a two-phase interleaved boost DC-DC converter for Electric Vehicle applications. In Proceedings of the2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2474–2480. [Google Scholar]
- Hegazy, O.; Van Mierlo, J.; Lataire, P. Analysis, Modeling, and Implementation of a Multidevice Interleaved DC/DC Converter for Fuel Cell Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2012, 27, 4445–4458. [Google Scholar] [CrossRef]
- Ou, J.; Liu, Y.; Breining, P.; Schiefer, M.; Doppelbauer, M. Experimental Study of the Amorphous Magnetic Material for High-Speed Sleeve-Free PM Rotor Application. IEEE Trans. Ind. Electron. 2019, 67, 4422–4432. [Google Scholar] [CrossRef]
- Luo, Z.; Li, X.; Jiang, C.; Li, Z.; Long, T. Permeability-Adjustable Nanocrystalline Flake Ribbon in Customized High-Frequency Magnetic Components. IEEE Trans. Power Electron. 2023, 39, 3477–3485. [Google Scholar] [CrossRef]
- Haubert, T.; Mindl, P.; Čeřovský, Z. Design of Control and Switching Frequency Optimization of DC/DC Power Converter for Super-capacitor. Automatika 2016, 57, 141–149. [Google Scholar] [CrossRef]
- Hao, X.; Salhi, I.; Laghrouche, S.; Ait-Amirat, Y.; Djerdir, A. Robust control of four-phase interleaved boost converter by considering the performance of PEM fuel cell current. Int. J. Hydrog. Energy 2021, 46, 38827–38840. [Google Scholar] [CrossRef]
- Available online: https://www.bikedekho.com/tvs/iqube-electric/specifications (accessed on 26 August 2023).
- Eswar, K.N.D.V.S.; Doss, M.A.N.; Jayapragash, J. Design of Zeta Converter Integrated with Renewable Source PV and Hybrid Energy Storage Systems for Industrial/Domestic Applications. In International Symposium on Sustainable Energy and Technological Advancements; Panda, G., Alhelou, H.H., Thakur, R., Eds.; Springer: Singapore, 2023; pp. 303–317. [Google Scholar]
- Available online: https://evfunda.com/bajaj-re-electric-auto-rickshaw/ (accessed on 26 August 2023).
- Available online: https://www.cardekho.com/tata/nexon-ev (accessed on 26 August 2023).
- Chakraborty, S.; Vu, H.-N.; Hasan, M.M.; Tran, D.-D.; Baghdadi, M.E.; Hegazy, O. DC-DC Converter Topologies for Electric Vehicles, Plug-in Hybrid Electric Vehicles and Fast Charging Stations: State of the Art and Future Trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef]
- Nahar, S.; Uddin, M.B. Analysis the performance of interleaved boost converter. In Proceedings of the 2018 4th International Conference on Electrical Engineering and Information & Communication Technology (iCEEiCT), Dhaka, Bangladesh, 13–15 September 2018; pp. 547–551. [Google Scholar]
- Samuel, V.J.; Keerthi, G.; Mahalingam, P. Interleaved quadratic boost DC–DC converter with high voltage gain capability. Electr. Eng. 2020, 102, 651–662. [Google Scholar] [CrossRef]
- Sampath, S.; Rahiman, Z.; Chenniappan, S.; Sundaram, E.; Subramaniam, U.; Padmanaban, S. Efficient Multi-Phase Converter for E-Mobility. World Electr. Veh. J. 2022, 13, 67. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating States | T1 | T2 | T3 | T4 | Operating States | T1 | T2 | T3 | T4 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mode-1 0 < D1(t) + D2(t) + D3(t) + D4(t) ≤ 1 | 1000 | ✓ | ✖ | ✖ | ✖ | Mode-3 2 < D1(t) + D2(t) + D3(t) + D4(t) ≤ 3 | 1011 | ✓ | ✖ | ✓ | ✓ |
| 0000 | ✖ | ✖ | ✖ | ✖ | 1001 | ✓ | ✖ | ✖ | ✓ | ||
| 0100 | ✖ | ✓ | ✖ | ✖ | 1101 | ✓ | ✓ | ✖ | ✓ | ||
| 0000 | ✖ | ✖ | ✖ | ✖ | 1100 | ✓ | ✓ | ✖ | ✖ | ||
| 0010 | ✖ | ✖ | ✓ | ✖ | 1110 | ✓ | ✓ | ✓ | ✖ | ||
| 0000 | ✖ | ✖ | ✖ | ✖ | 0110 | ✖ | ✓ | ✓ | ✖ | ||
| 0001 | ✖ | ✖ | ✖ | ✓ | 0111 | ✖ | ✓ | ✓ | ✓ | ||
| 0000 | ✖ | ✖ | ✖ | ✖ | 0011 | ✖ | ✖ | ✓ | ✓ | ||
| Mode-2 1 < D1(t) + D2(t) + D3(t) + D4(t) ≤ 2 | Mode-4 3 < D1(t) + D2(t) + D3(t) + D4(t) ≤ 4 | ||||||||||
| 1000 | ✓ | ✖ | ✖ | ✖ | 0111 | ✖ | ✓ | ✓ | ✓ | ||
| 1100 | ✓ | ✓ | ✖ | ✖ | 1111 | ✓ | ✓ | ✓ | ✓ | ||
| 0100 | ✖ | ✓ | ✖ | ✖ | 1011 | ✓ | ✖ | ✓ | ✓ | ||
| 0110 | ✖ | ✓ | ✓ | ✖ | 1111 | ✓ | ✓ | ✓ | ✓ | ||
| 0010 | ✖ | ✖ | ✓ | ✖ | 1101 | ✓ | ✓ | ✖ | ✓ | ||
| 0011 | ✖ | ✖ | ✓ | ✓ | 1111 | ✓ | ✓ | ✓ | ✓ | ||
| 0001 | ✖ | ✖ | ✖ | ✓ | 1110 | ✓ | ✓ | ✓ | ✖ | ||
| 1001 | ✓ | ✖ | ✖ | ✓ | 1111 | ✓ | ✓ | ✓ | ✓ | ||
| Parameters and Its Specifications | |||||
|---|---|---|---|---|---|
| S O L A R D A T A | Maximum Power (Pmax) | 15,000 W | W I N D D A T A | Rated Power Output (PRout) | 5000 W |
| Voltage at max. power (Vmax) | 220 V | Peak power output (PPout) | 6800 W | ||
| Current at max. power (Imax) | 6.818 A | Rated voltage (R voltage) | 415 v | ||
| Open circuit voltage (Voc) | 232.32 V | Cut-in (N Cin), Cut-out (Ncout) and wind speed (Nw) | 2, 18, and 8 m/s | ||
| Short circuit current (Isc) | 5.65 A | Rated rotor speed (Nrotor) | 250 rpm | ||
| No. of panels (Np) | 10 | Generator efficiency (η gen) | 0.95 | ||
| No. of strings (Ns) | 1 | Number of blades (Nblades) | 3 | ||
| Cells in string (Ncs) | 10 | Rotor diameter (Dr) | 3600 mm | ||
| Cp value at max. (Cpmax) | 0.18 | ||||
| Parameter Variable | Ratings |
|---|---|
| Rated power output (W) | 3 KW |
| Battery capacity and type | 48 V, 62 Ah, 2.97 kWh, Li-ion |
| Charging condition | Up to 4 h to charge 0–90% |
| Battery type | Li-ion |
| On-board charger | 1.8 kW |
| Parameter Variable | Ratings |
|---|---|
| Rated power output (W) | 4.3 KW |
| Battery capacity and type | 48 V, 91.66 Ah, 4.4 Kwh Li-ion |
| Charging condition | up to 6 h to charge 0–80% |
| Battery type | Li-ion |
| On-board charger | 2.2 KW |
| Parameter Variable | Ratings |
|---|---|
| Rated power output (W) | 4.8 KW |
| Battery capacity and type | 72 V, 298.61 Ah, 21.5 Kwh Li-ion |
| Charging condition | up to 8 h to charge 0–80% |
| Battery type | Li-ion |
| On-board charger | 9.1 kW |
| Type of Converter | Vin(v) | Vout(v) | Iout(A) | N | Fs(Hz) | L(μH) | C(μF) | D | Po(W) | Pl(W) | Pin(W) | η% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Boost [26] | 200 | 380 | 13.02 | 1 | 20 | 410 | 780 | 0.5 | 4.94 | 317.54 | 5.26 | 93.97 |
| Full Bridge [27] | 200 | 434 | 13.56 | 2 | 20 | 115 | 250 | 0.5 | 5.80 | 267.34 | 6.15 | 94.24 |
| 2P-IBC [28] | 200 | 435.7 | 13.62 | 4 | 20 | 100 | 235 | 0.5 | 5.93 | 266.88 | 6.19 | 95.66 |
| 6P-IBC [29] | 200 | 500 | 13.98 | 6 | 20 | 85 | 195 | 0.5 | 6.99 | 270 | 7.26 | 96.28 |
| Proposed FP-ICIBC | 232 | 464.4 | 14.125 | 4 | 25 | 66.67 | 168 | 0.5 | 6.56 | 201.48 | 6.76 | 97.02 |
| Parameter | Gain | Rise Time | Voltage Ripple | Charging Time |
|---|---|---|---|---|
| Boost [26] | Very low | 1.02 s | 12.5% | Very high |
| Full Bridge [27] | Average | 1.08 s | 12.5% | High |
| 2P-IBC [28] | Max. 2 | 2.02 s | 5.12% | Moderate |
| Proposed FP-ICIBC | High | 1.05 s | <2.9% | Very low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eswar, K.N.D.V.S.; Doss, M.A.N.; Alruwaili, M.; Abdelfattah, W.M. Implementation of a Microgrid System with a Four-Phase Inductor Coupled Interleaved Boost Converter for EV Charging Stations. Energies 2024, 17, 2277. https://doi.org/10.3390/en17102277
Eswar KNDVS, Doss MAN, Alruwaili M, Abdelfattah WM. Implementation of a Microgrid System with a Four-Phase Inductor Coupled Interleaved Boost Converter for EV Charging Stations. Energies. 2024; 17(10):2277. https://doi.org/10.3390/en17102277
Chicago/Turabian StyleEswar, Kommoju Naga Durga Veera Sai, Mohan Arun Noyal Doss, Mohammed Alruwaili, and Waleed Mohammed Abdelfattah. 2024. "Implementation of a Microgrid System with a Four-Phase Inductor Coupled Interleaved Boost Converter for EV Charging Stations" Energies 17, no. 10: 2277. https://doi.org/10.3390/en17102277
APA StyleEswar, K. N. D. V. S., Doss, M. A. N., Alruwaili, M., & Abdelfattah, W. M. (2024). Implementation of a Microgrid System with a Four-Phase Inductor Coupled Interleaved Boost Converter for EV Charging Stations. Energies, 17(10), 2277. https://doi.org/10.3390/en17102277