
Deep Reinforcement Learning-Based Battery Management Algorithm for Retired Electric Vehicle Batteries with a Heterogeneous State of Health in BESSs



Abstract
:1. Introduction
- A scheduling algorithm is proposed to maximize the lifetime of a battery pack consisting of parallel-connected battery cells with heterogeneous states of health in a BESS.
- We define the battery lifetime maximization problem as the reduction in the SOH of a battery pack that can be achieved by reducing the imbalance in the SOHs of battery cells in a battery pack.
- A deep reinforcement learning (DRL) framework is implemented in the scheduling algorithm that uses battery cells’ states to set their ON/OFF status and balance the SOHs.
- To measure the battery cells’ states to schedule their ON/OFF status, an extended Kalman filter (EKF)-based algorithm is proposed to estimate SOC and SOH.
- A dataset of real measurements is used to determine the accuracy of the proposed estimation algorithm. The proposed algorithm achieves minimal error compared to methods proposed in other works. Simulation results show that the proposed algorithm outperforms previous studies by extending the lifetime of a battery pack under constant and dynamic power demands.
2. System Model
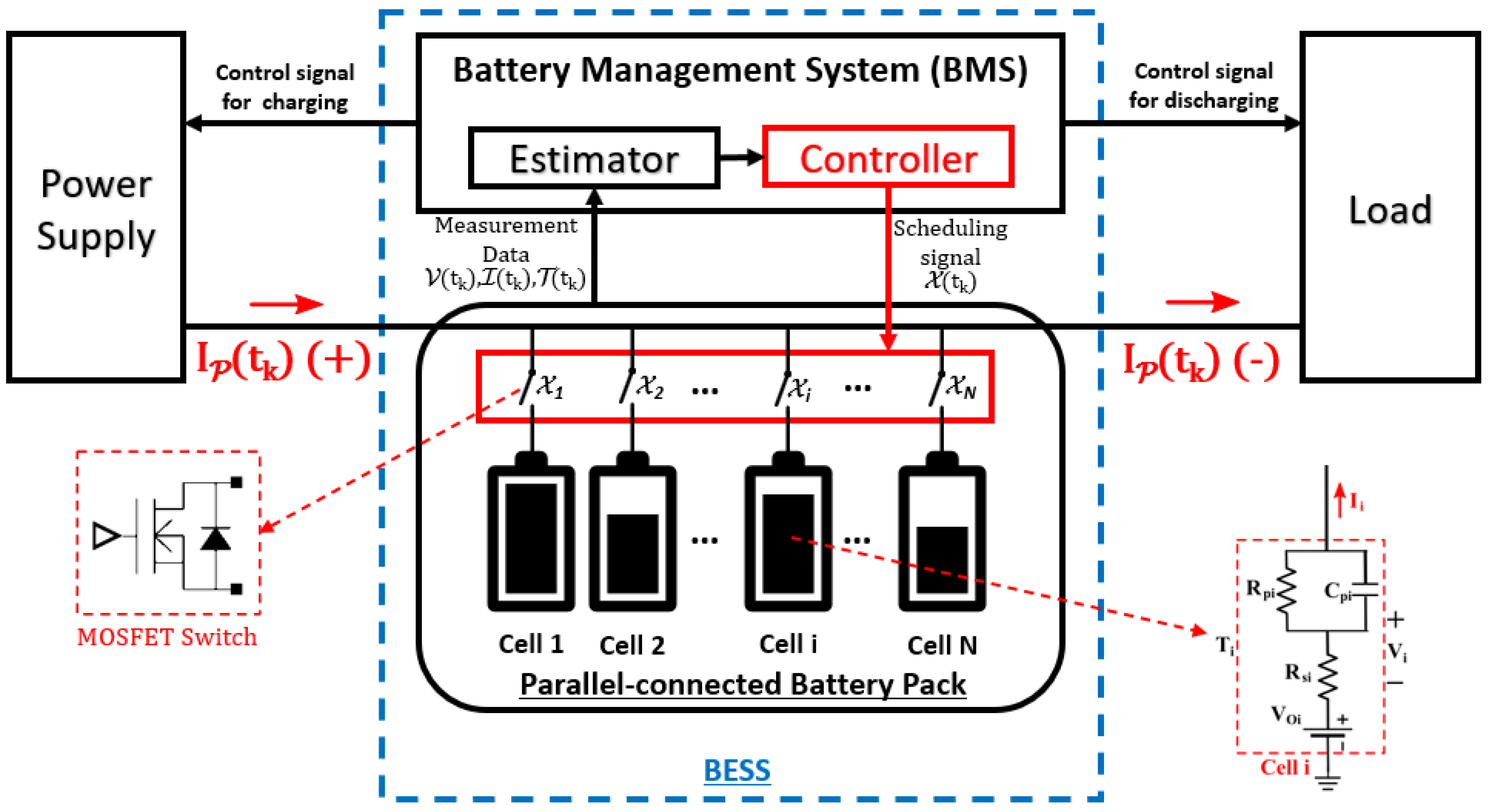
2.1. Overall System
2.2. Problem Formulation
3. The Proposed Algorithm
| Algorithm 1 EKF-based SOC and SOH estimation |
|
| Algorithm 2 The Charge/Discharge Control Algorithm |
|
| Algorithm 3 The Deep Q Network Switches Scheduling Algorithm |
|
3.1. EKF-Based SOC and SOH Estimation
3.2. The Charge/Discharge Control Algorithm
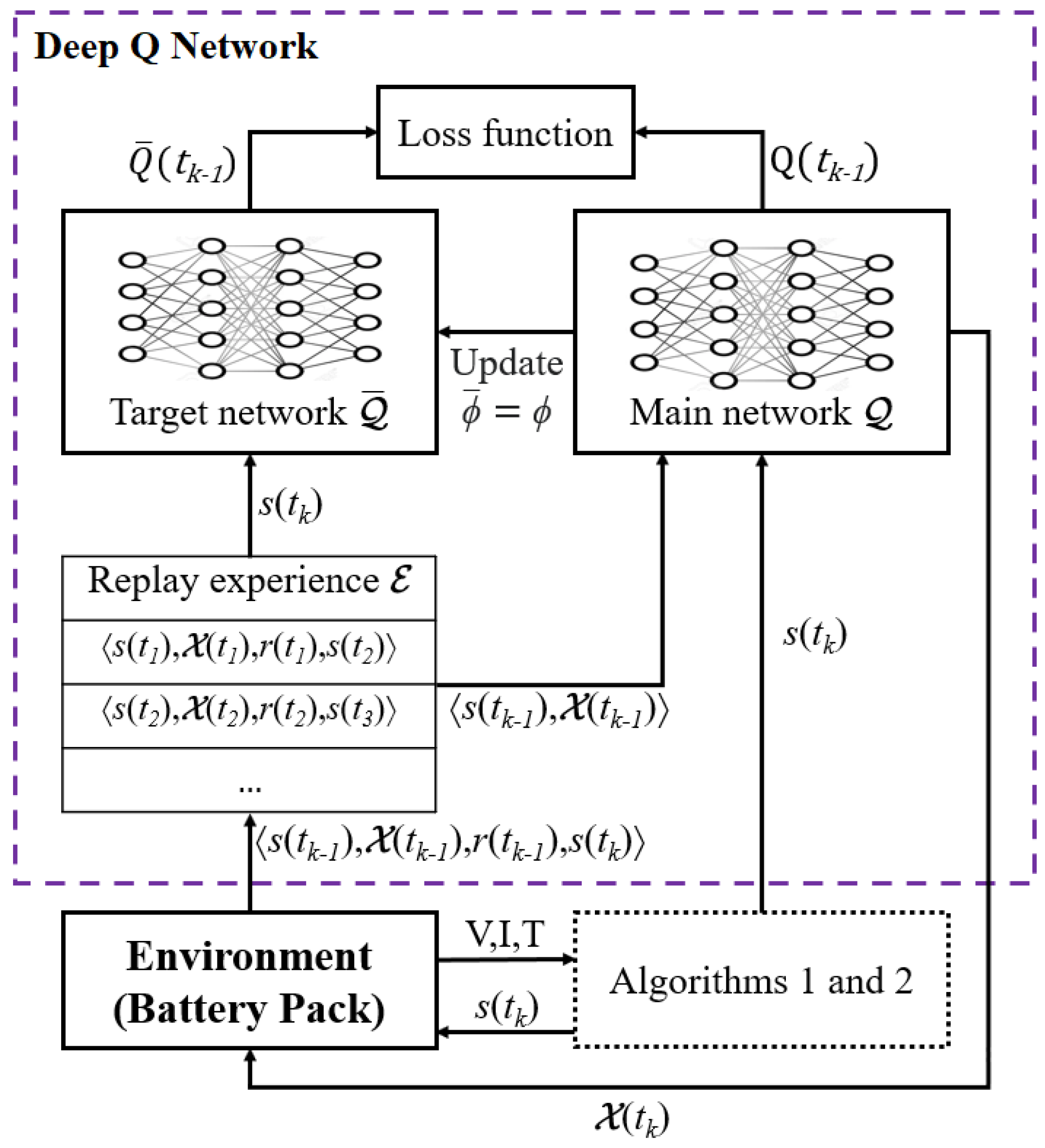
3.3. Deep Reinforcement Learning-Based Scheduling Algorithm
4. Performance Evaluation
4.1. Simulation Environment
4.2. State Estimation Verification
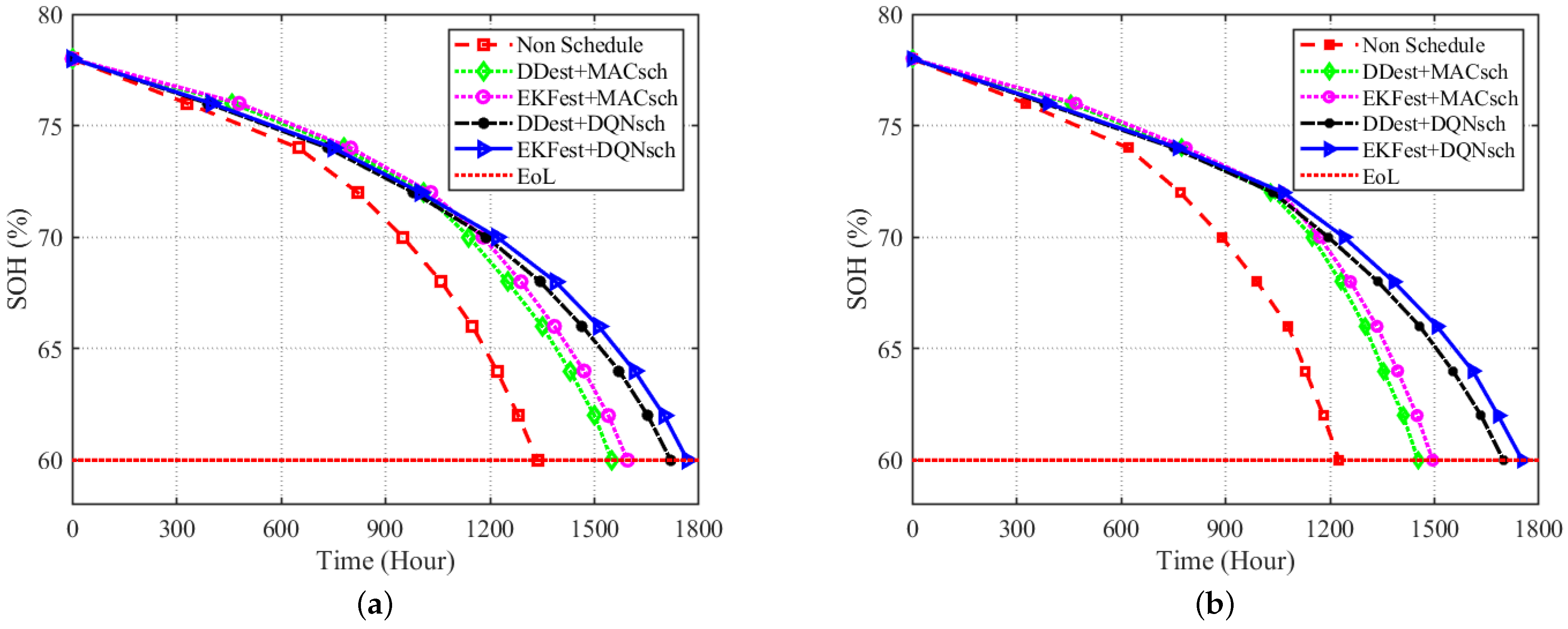
4.3. Impact of the Proposed Algorithms on Battery Pack Lifetime
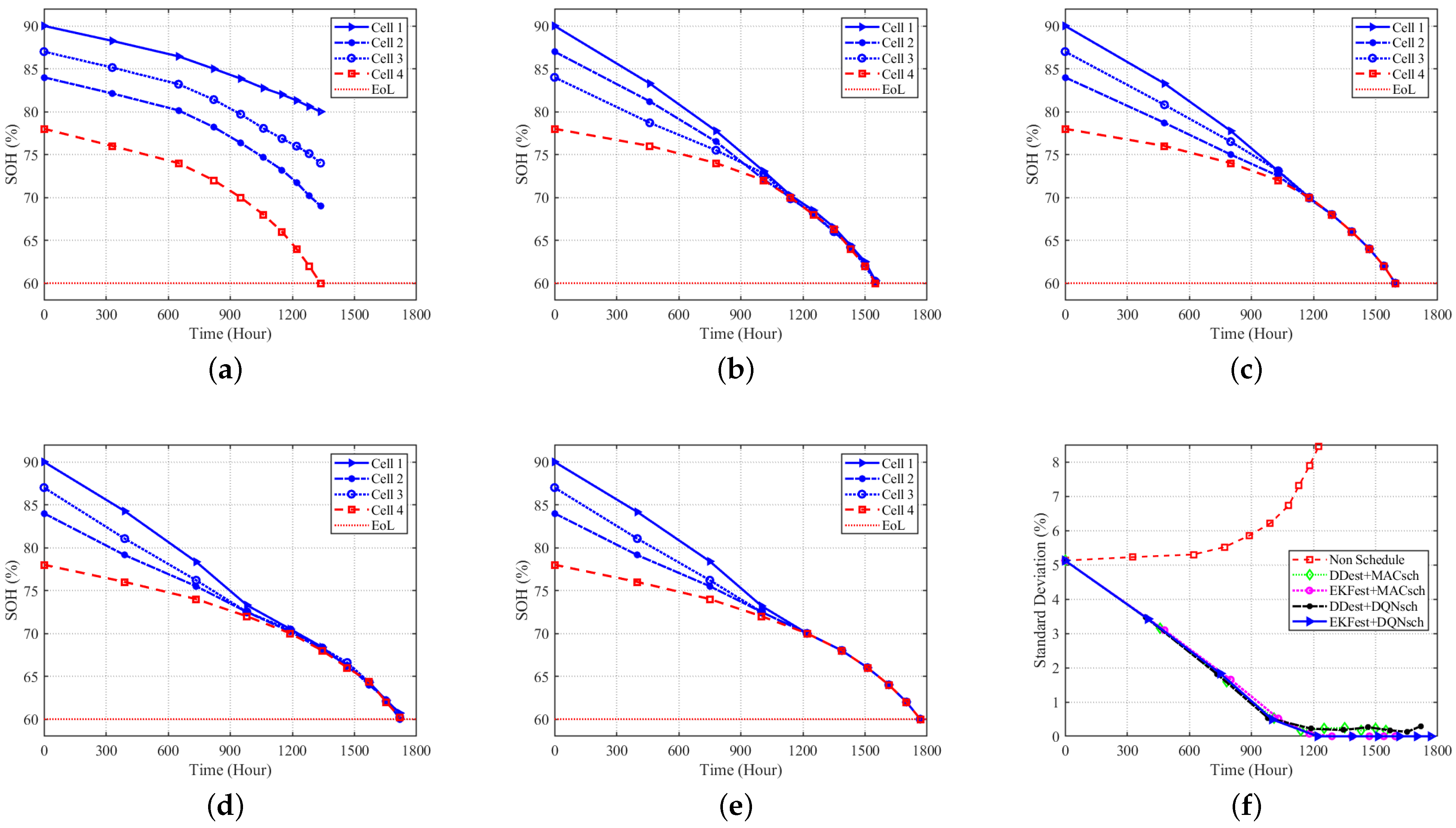
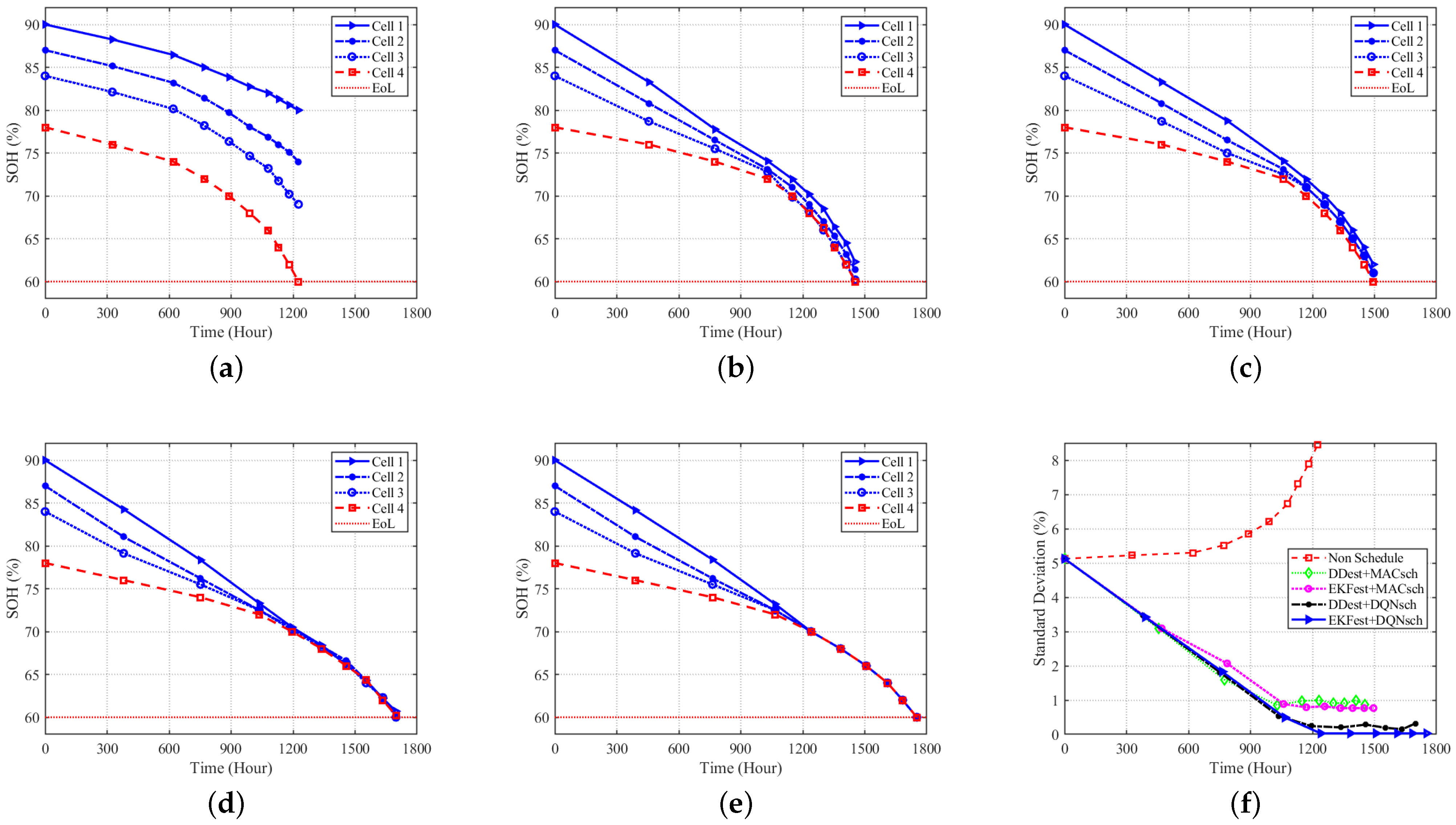
4.4. Impact of the Proposed Algorithm on Capacity Balancing
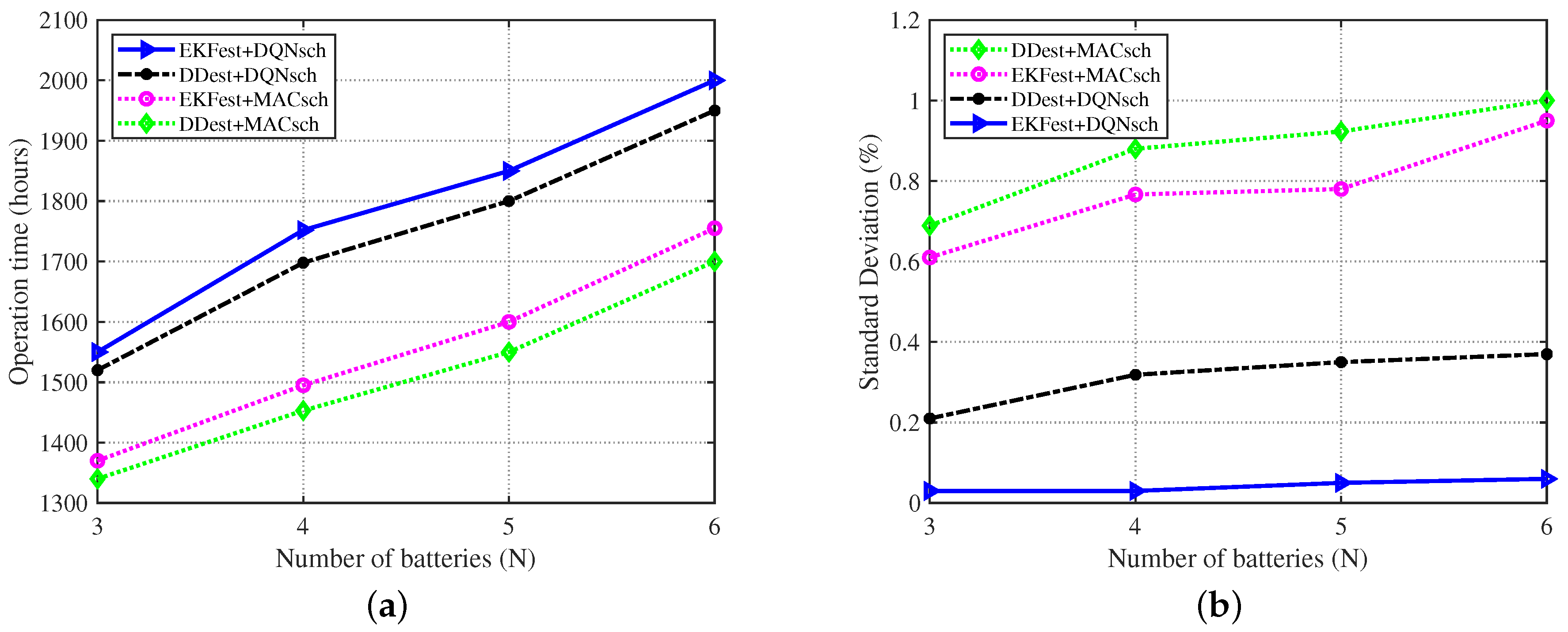
4.5. Impact of Numbers of Batteries on the Proposed Algorithm
5. Conclusions and Future Work
- (i)
- estimated the SOCs and SOHs of all battery cells using EKF;
- (ii)
- used estimated SOCs and SOHs to represent the state of a BESS for DRL-based scheduling; and
- (iii)
- controlled the ON/OFF switches of battery cells inside the battery pack utilizing deep Q network knowledge.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Marinaro, M.; Bresser, D.; Beyer, E.; Faguy, P.; Hosoi, K.; Li, H.; Sakovica, J.; Amine, K.; Wohlfahrt-Mehrens, M.; Passerini, S. Bringing forward the development of battery cells for automotive applications: Perspective of R&D activities in China, Japan, the EU and the USA. J. Power Sources 2020, 459, 228073. [Google Scholar]
- Ding, Y.L.; Cano, Z.; Yu, A.; Lu, J.; Chen, Z. Automotive Li-Ion Batteries: Current Status and Future Perspectives. Electrochem. Energy Rev. 2019, 2, 1–28. [Google Scholar] [CrossRef]
- Hunt, G. USABC Electric Vehicle Battery Test Procedures Manual. Revision 2; USDOE: Washington, DC, USA, 1996.
- I.E.A. Global EV Outlook 2019; International Energy Agency: Paris, France, 2019.
- Martinez-Laserna, E.; Gandiaga, I.; Sarasketa-Zabala, E.; Badeda, J.; Stroe, D.I.; Swierczynski, M.; Goikoetxea, A. Battery second life: Hype, hope or reality? A critical review of the state of the art. Renew. Sustain. Energy Rev. 2018, 93, 701–718. [Google Scholar] [CrossRef]
- Sui, Y.; Song, S. A Multi-Agent Reinforcement Learning Framework for Lithium-ion Battery Scheduling Problems. Energies 2020, 13, 1982. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Zhao, L.; Lin, M.; Chen, Y. Least-squares based coulomb counting method and its application for state-of-charge (SOC) estimation in electric vehicles. Int. J. Energy Res. 2016, 40, 1389–1399. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, L.; Yu, Q.; Liu, S.; Zhou, G.; Shen, W. State of charge estimation for lithium-ion batteries based on cross-domain transfer learning with feedback mechanism. J. Energy Storage 2023, 70, 108037. [Google Scholar] [CrossRef]
- Xiong, X.; Wang, Y.; Li, K.; Chen, Z. State of health estimation for lithium-ion batteries using Gaussian process regression-based data reconstruction method during random charging process. J. Energy Storage 2023, 72, 108390. [Google Scholar] [CrossRef]
- Song, Y.; Liu, D.; Liao, H.; Peng, Y. A hybrid statistical data-driven method for on-line joint state estimation of lithium-ion batteries. Appl. Energy 2020, 261, 114408. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Xiong, R.; Pan, Y.; Shen, W.; Li, H.; Sun, F. Lithium-ion battery aging mechanisms and diagnosis method for automotive applications: Recent advances and perspectives. Renew. Sustain. Energy Rev. 2020, 131, 110048. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.; Ma, H.; Li, S.E. Combined State of Charge and State of Health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Song, C.; Shao, Y.; Song, S.; Chang, C.; Zhou, F.; Peng, S.; Xiao, F. Energy Management of Parallel-Connected Cells in Electric Vehicles Based on Fuzzy Logic Control. Energies 2017, 10, 404. [Google Scholar] [CrossRef]
- Zhang, H.; Pei, L.; Sun, J.; Song, K.; Lu, R.; Zhao, Y.; Zhu, C.; Wang, T. Online Diagnosis for the Capacity Fade Fault of a Parallel-Connected Lithium Ion Battery Group. Energies 2016, 9, 387. [Google Scholar] [CrossRef]
- Kim, H.; Shin, K.G. Scheduling of Battery Charge, Discharge, and Rest. In Proceedings of the 2009 30th IEEE Real-Time Systems Symposium, Washington, DC, USA, 1–4 December 2009; pp. 13–22. [Google Scholar]
- Sun, B.; Xiong, L.; Liu, X.; Zhu, H. Research on Electromagnetic Compatibility in the Design of Battery Management System. In Proceedings of the 2023 IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 6–9 August 2023; pp. 363–368. [Google Scholar]
- Bruen, T.; Marco, J.; Gama, M. Current Variation in Parallelized Energy Storage Systems. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Kim, J.; Cho, B. Screening process-based modeling of the multi-cell battery string in series and parallel connections for high accuracy state-of-charge estimation. Energy 2013, 57, 581–599. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Bole, B.; Kulkarni, C.; Daigle, M. Randomized Battery Usage Data Set. In NASA Prognostics Data Repository; NASA Ames Research Center: Moffett Field, CA, USA, 2009. [Google Scholar]
- Liu, X.; Li, J.; Yao, Z.; Wang, Z.; Si, R.; Diao, Y. Research on battery SOH estimation algorithm of energy storage frequency modulation system. Energy Rep. 2022, 8, 217–223. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; A Bradford Book: Cambridge, MA, USA, 2018. [Google Scholar]
- Giannelos, S.; Borozan, S.; Aunedi, M.; Zhang, X.; Ameli, H.; Pudjianto, D.; Konstantelos, I.; Strbac, G. Modelling Smart Grid Technologies in Optimisation Problems for Electricity Grids. Energies 2023, 16, 5088. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| Operational time | |
| Set of measured cell voltages at time | |
| Set of measured cell currents at time | |
| Set of measured cell temperatures at time | |
| Set of cells’ SOC values at time | |
| Set of cells’ SOH values at time | |
| SOH of the battery pack at time | |
| Measured terminal voltage of cell i at time | |
| Measured current of cell i at time | |
| Measured cell temperature of cell i at time | |
| ON/OFF switch of cell i | |
| Open-circuit voltage of cell i | |
| Internal resistance of cell i | |
| , | Resistor–capacitor pair of cell i |
| Discharging power load in cycle j up to time | |
| Charging power load in cycle j up to time | |
| Efficiencies of the discharging/charging process |
| Parameter | Value |
|---|---|
| Number of battery cells | 4 |
| Battery type | Lithium 3.7 V/2.2 Ah |
| Total capacity (new) | 32.56 Wh |
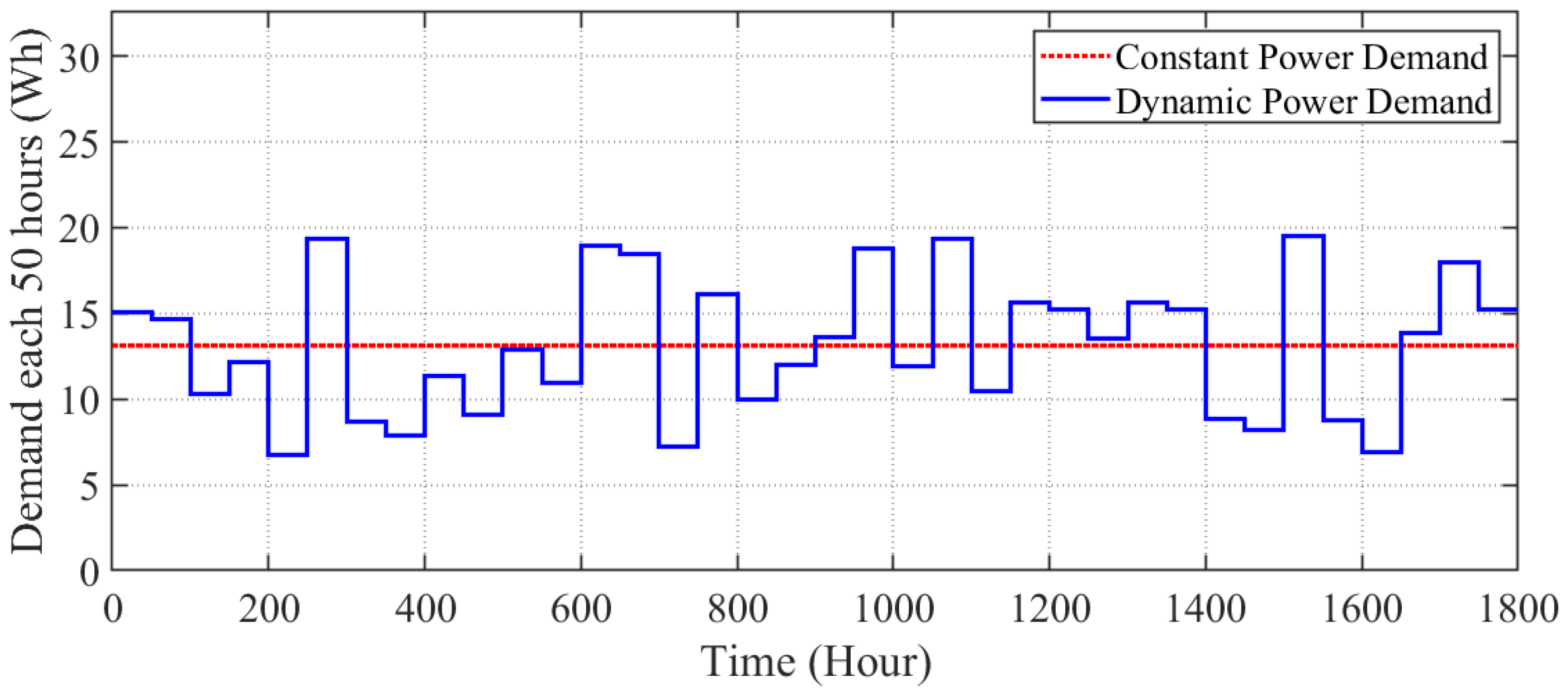
| Constant power demand | 13.13 Wh (40.32%) |
| 8 A | |
| −8 A | |
| −4 A, 4 A | |
| 10%, 90% | |
| 1 (discharge)/0.98 (charge) | |
| Total working time () | 1800 h |
| 10 min | |
| Capacity M of experience | 500 slots |
| Learning rate () | 0.001 |
| -greedy | |
| Discount factor () | |
| Period of target network update | 10 time slots |
| Number of Batteries | SOH Profile (%) | Total Max. Capacity |
|---|---|---|
| 3 | 89.59, 85.14, 79.57 | 5.59 Ah |
| 4 | 90.01, 86.77, 84.13, 78.15 | 7.46 Ah |
| 5 | 91.05, 87.95, 84.76, 81.95, 78.15 | 9.32 Ah |
| 6 | 91.17, 90.05, 84.86, 82.67, 81.65, 78.21 | 11.19 Ah |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doan, N.Q.; Shahid, S.M.; Choi, S.-J.; Kwon, S. Deep Reinforcement Learning-Based Battery Management Algorithm for Retired Electric Vehicle Batteries with a Heterogeneous State of Health in BESSs. Energies 2024, 17, 79. https://doi.org/10.3390/en17010079
Doan NQ, Shahid SM, Choi S-J, Kwon S. Deep Reinforcement Learning-Based Battery Management Algorithm for Retired Electric Vehicle Batteries with a Heterogeneous State of Health in BESSs. Energies. 2024; 17(1):79. https://doi.org/10.3390/en17010079
Chicago/Turabian StyleDoan, Nhat Quang, Syed Maaz Shahid, Sung-Jin Choi, and Sungoh Kwon. 2024. "Deep Reinforcement Learning-Based Battery Management Algorithm for Retired Electric Vehicle Batteries with a Heterogeneous State of Health in BESSs" Energies 17, no. 1: 79. https://doi.org/10.3390/en17010079
APA StyleDoan, N. Q., Shahid, S. M., Choi, S.-J., & Kwon, S. (2024). Deep Reinforcement Learning-Based Battery Management Algorithm for Retired Electric Vehicle Batteries with a Heterogeneous State of Health in BESSs. Energies, 17(1), 79. https://doi.org/10.3390/en17010079