

Common-Mode Voltage-Reduction Method of 7-Phase BLDC Motor Control System †


Abstract
:1. Introduction
2. Basic Control Method of the 7-Phase BLDC
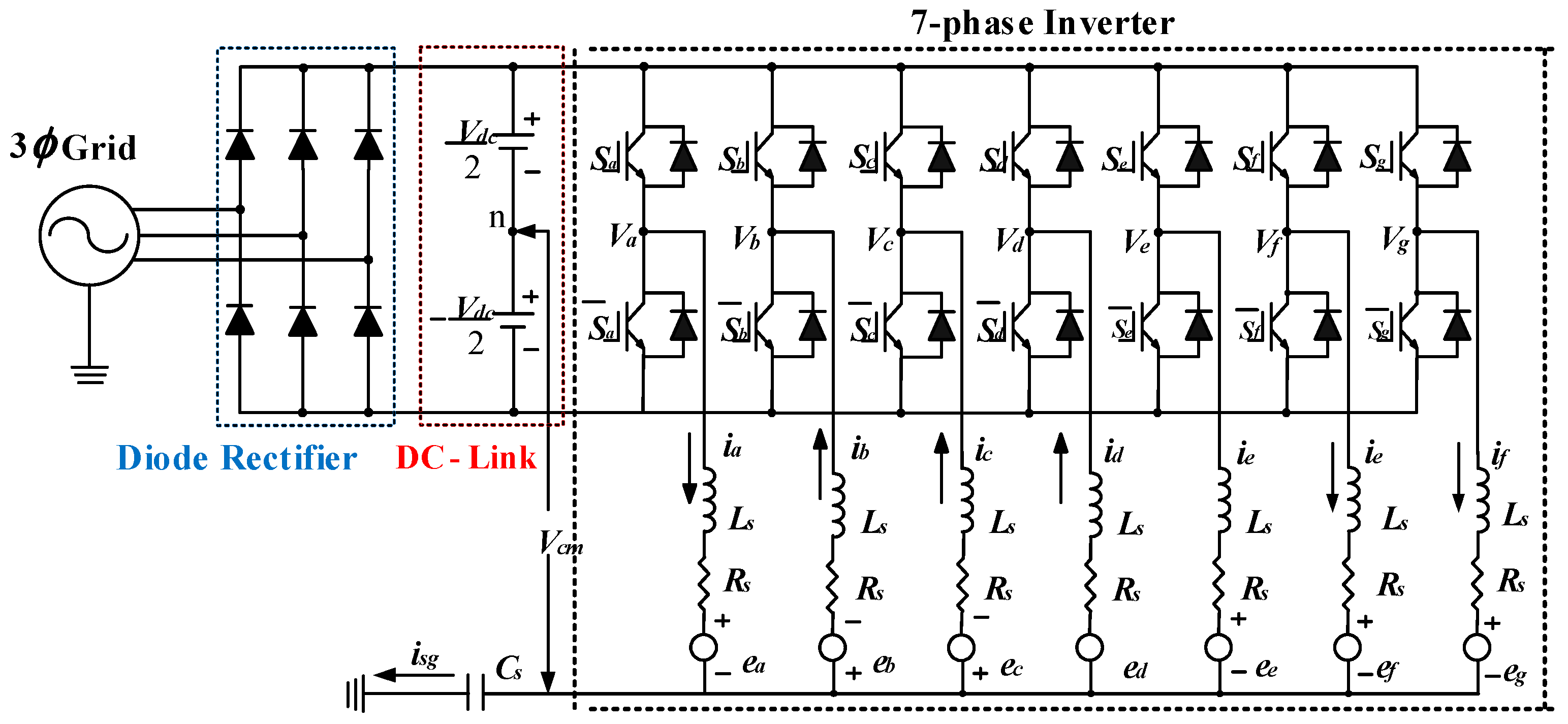
2.1. Mathematical Modeling
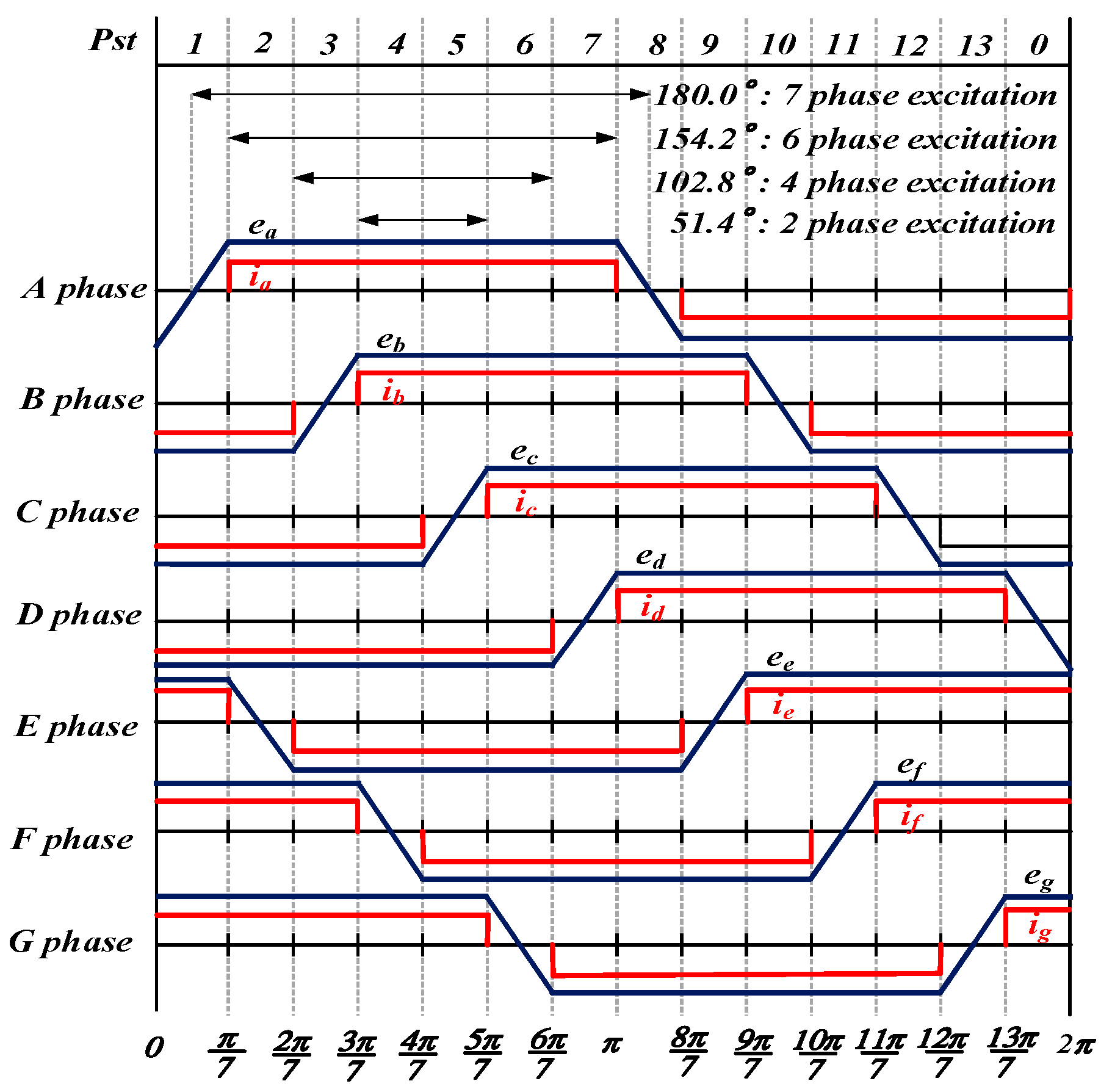
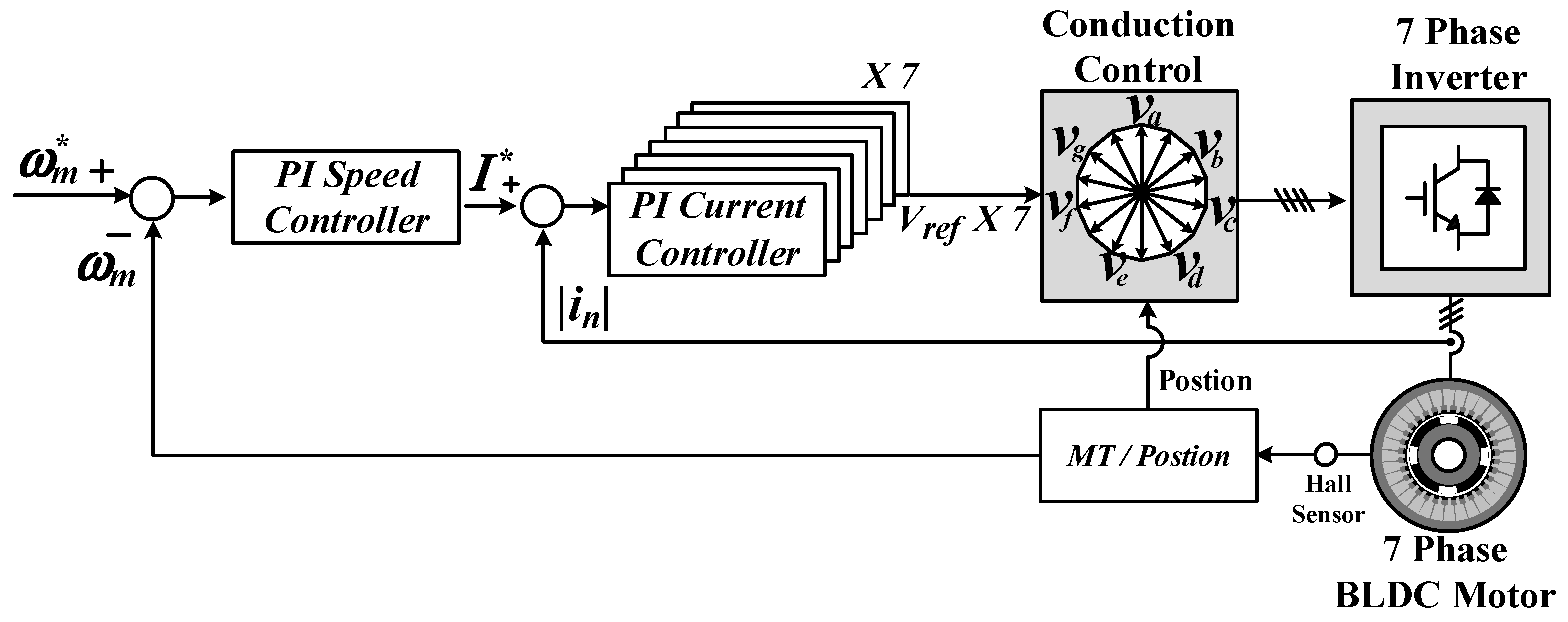
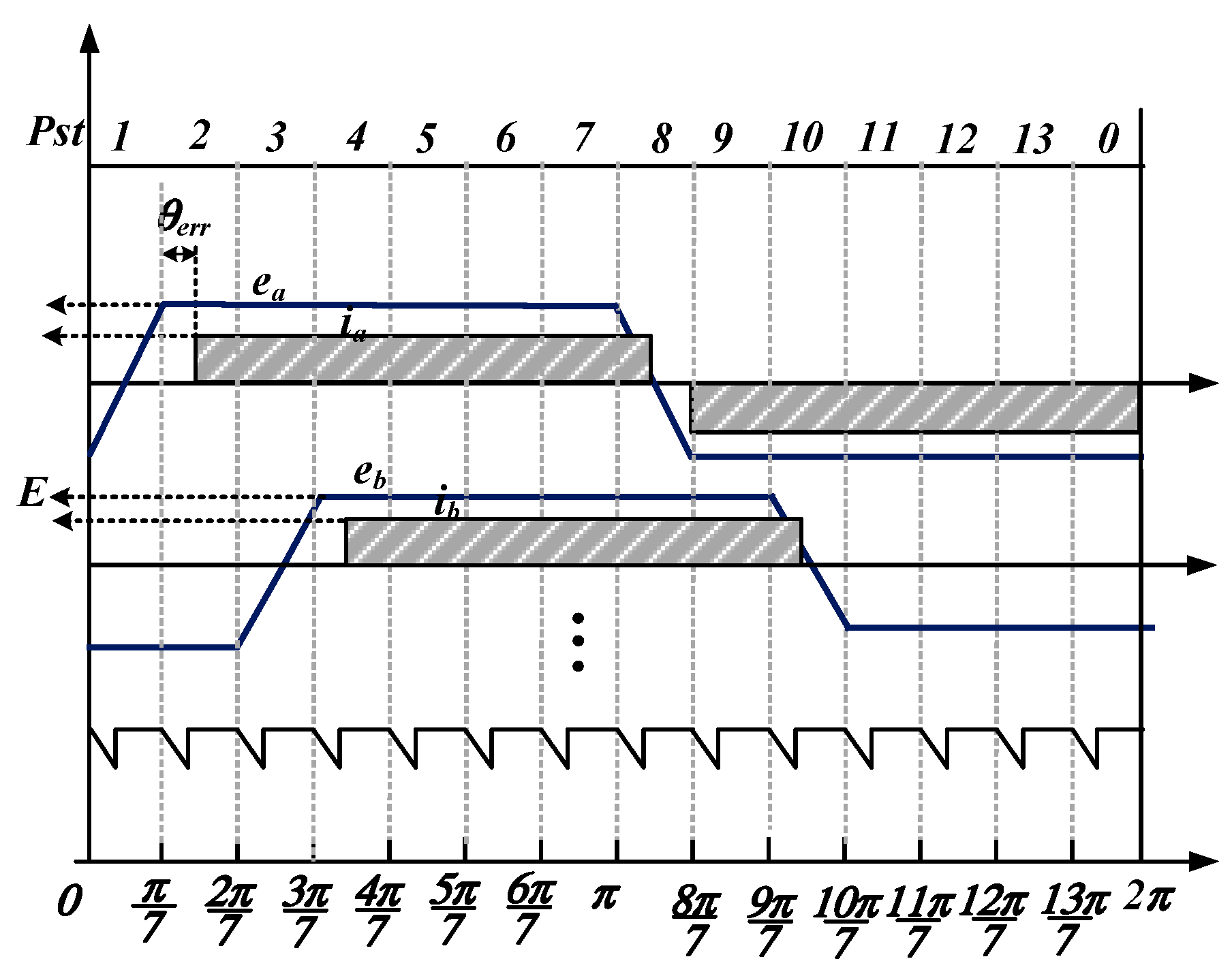
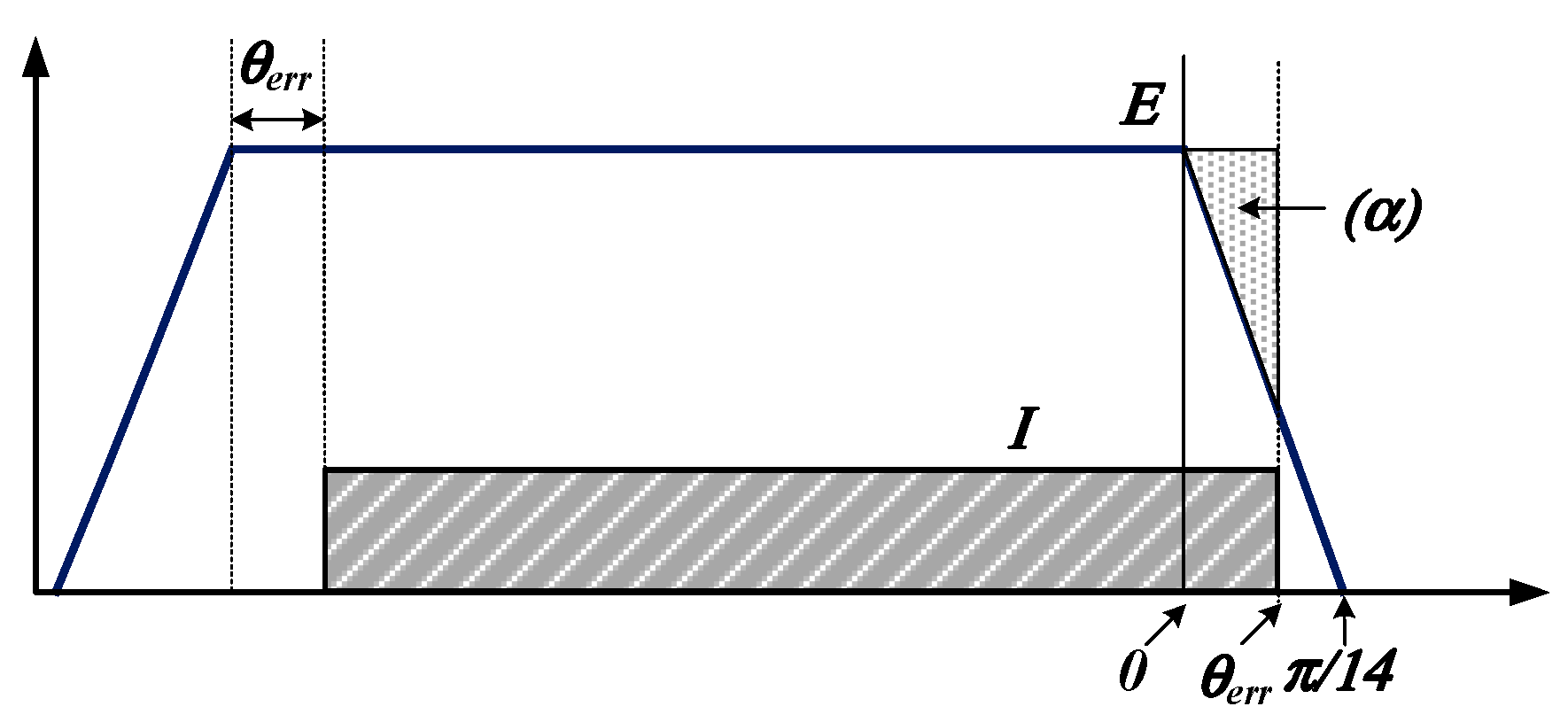
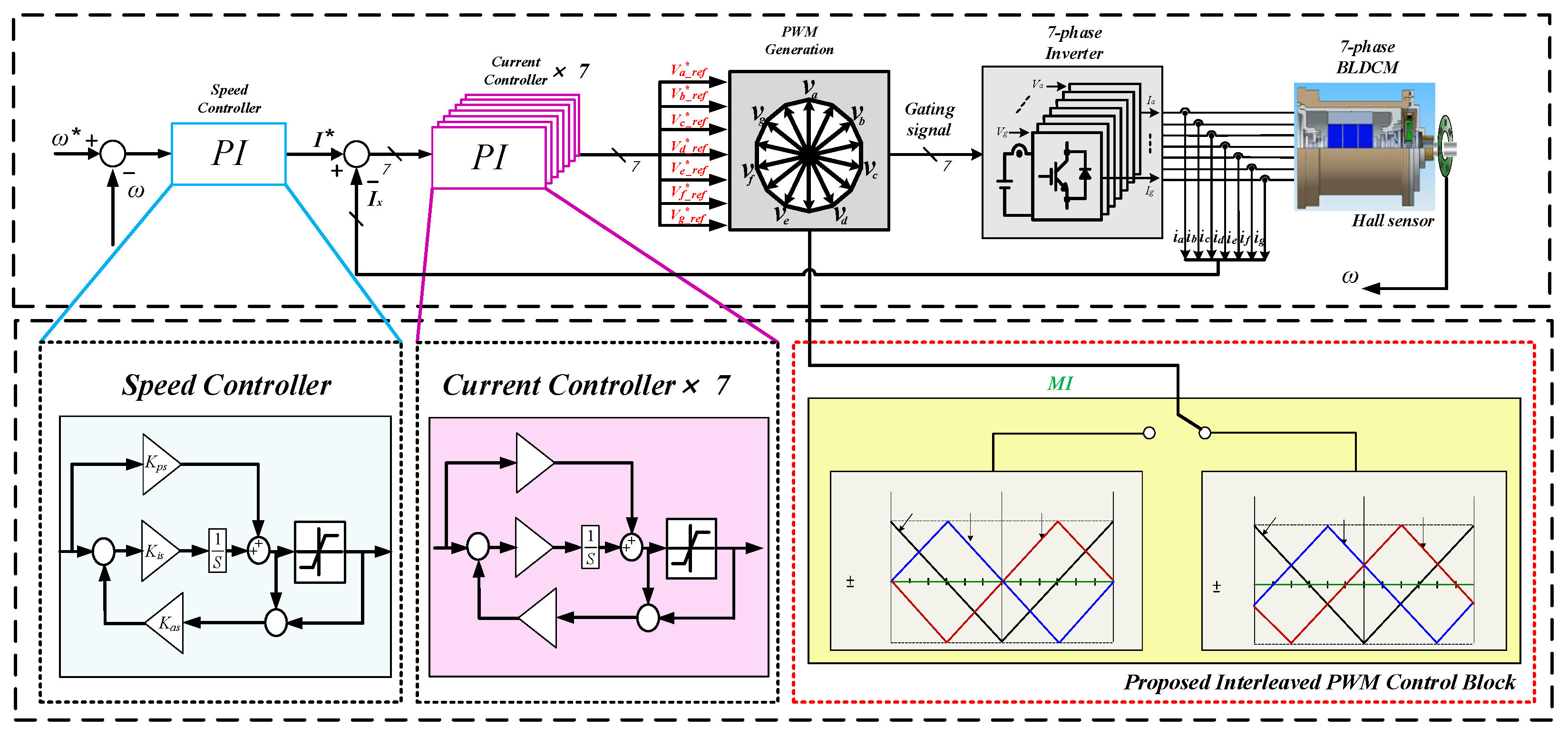
2.2. Basic Control Method
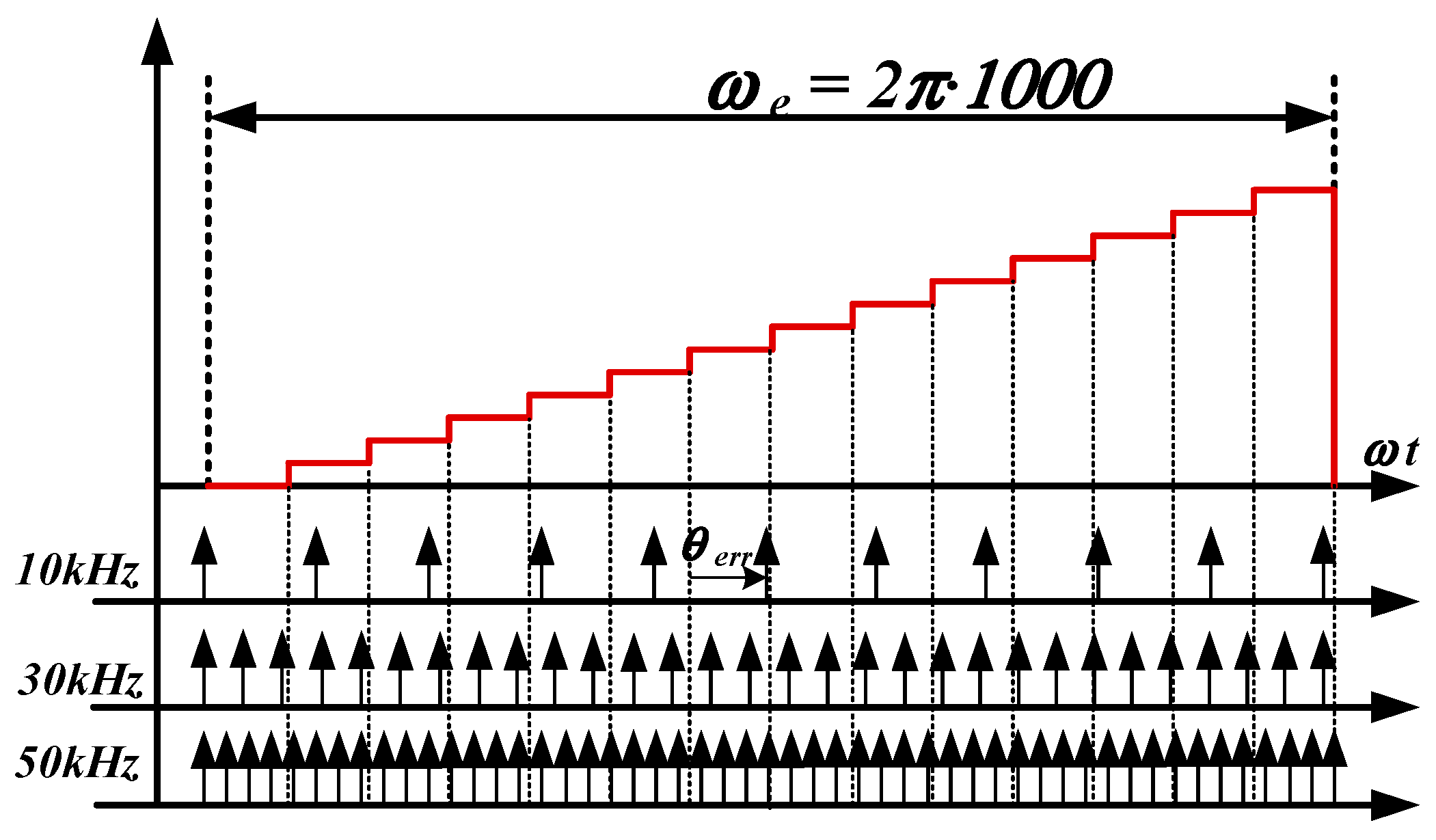
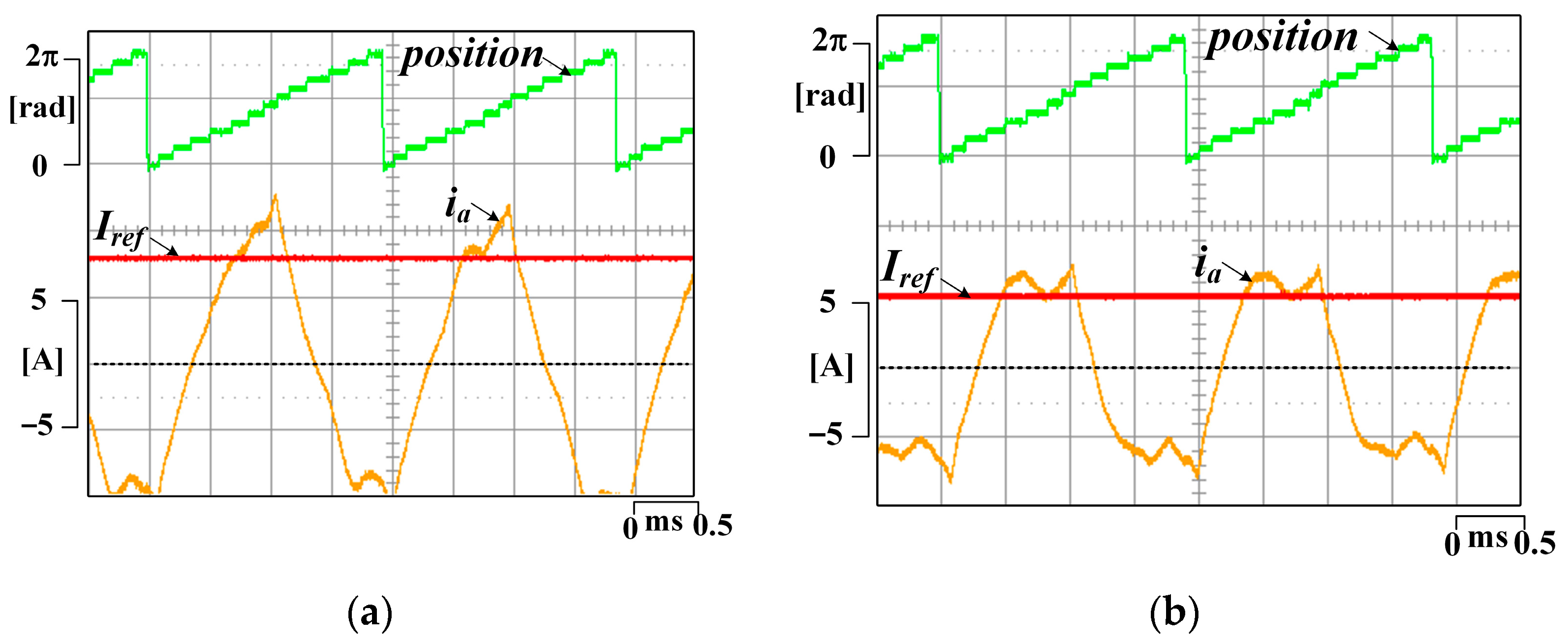
2.3. Control Characteristic according to Switching Frequency
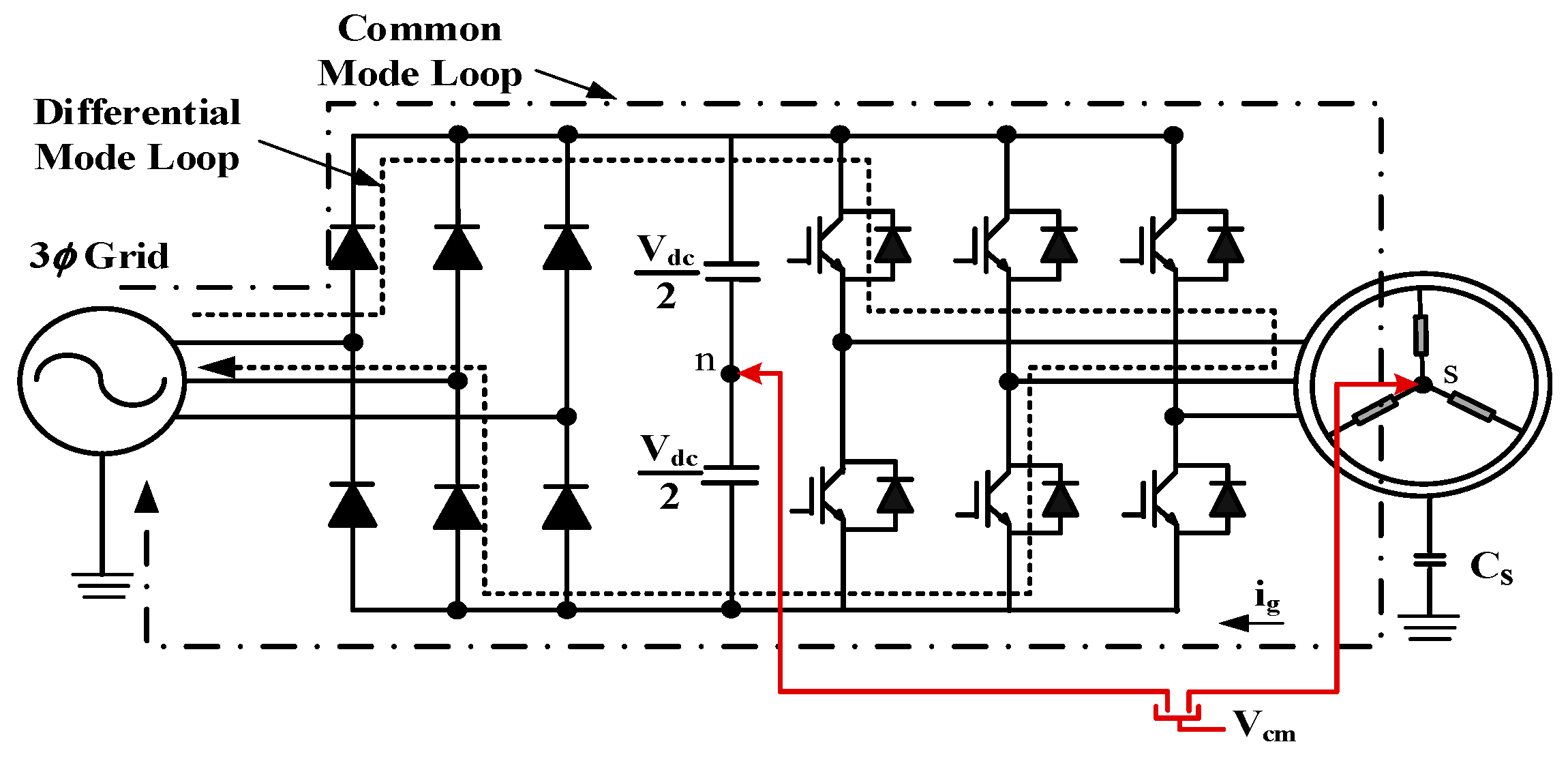
2.4. Description of the Common-Mode Voltage for the 7-Phase BLDC
3. Proposed Phase to Phase Interleaved Method
3.1. Definition of the Phase-Phase Interleaved in the Seven-Phase BLDCM
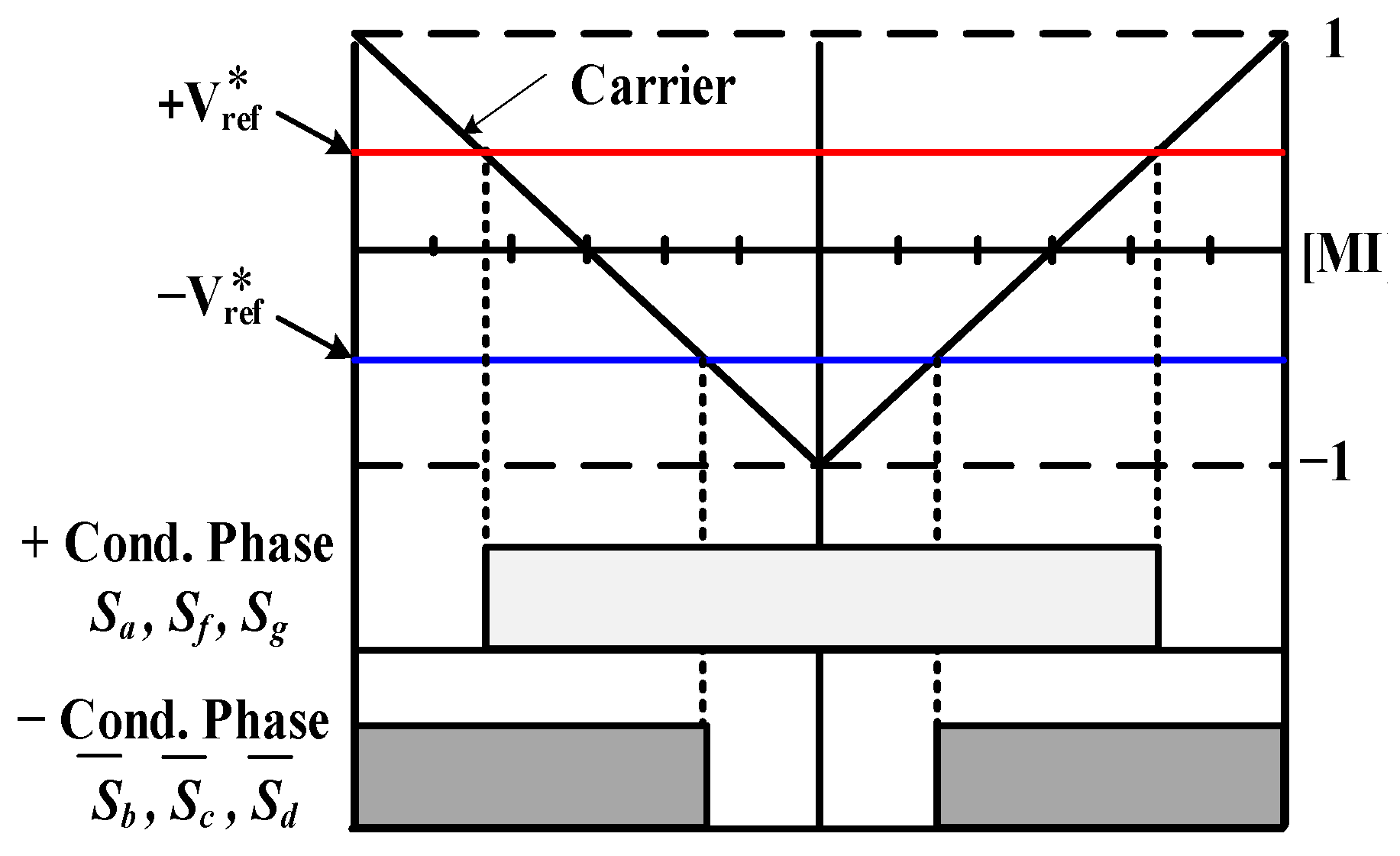
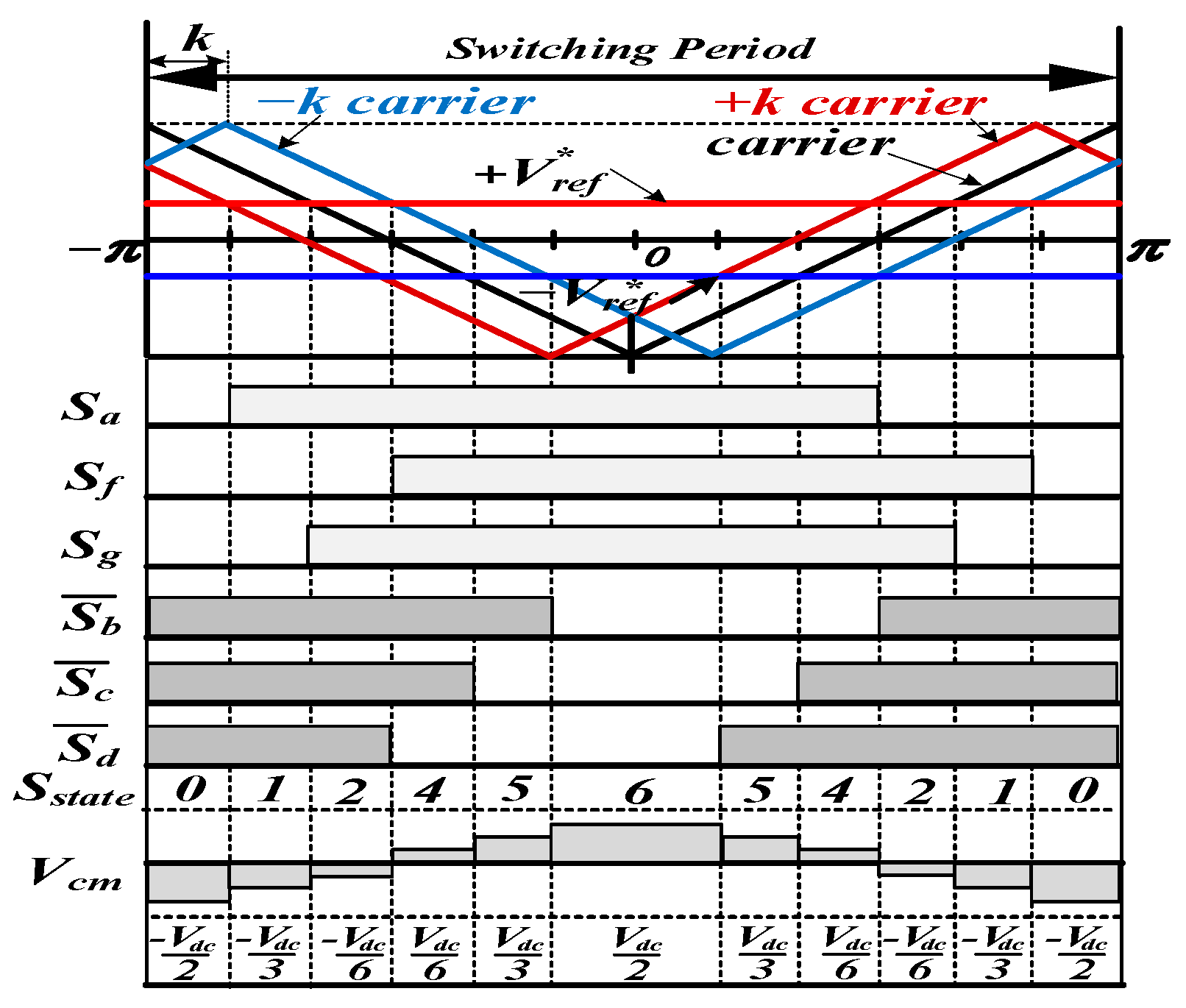
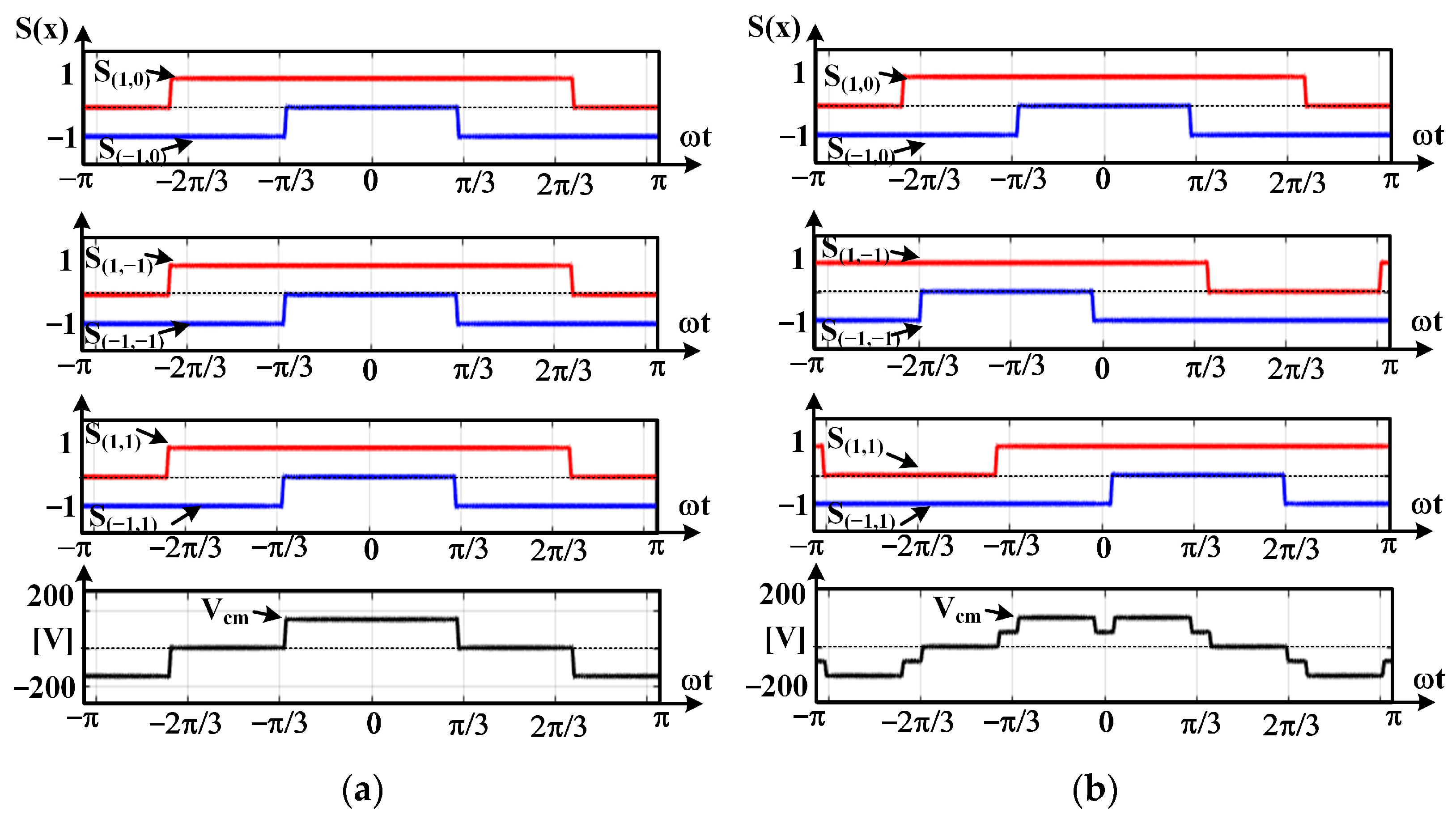
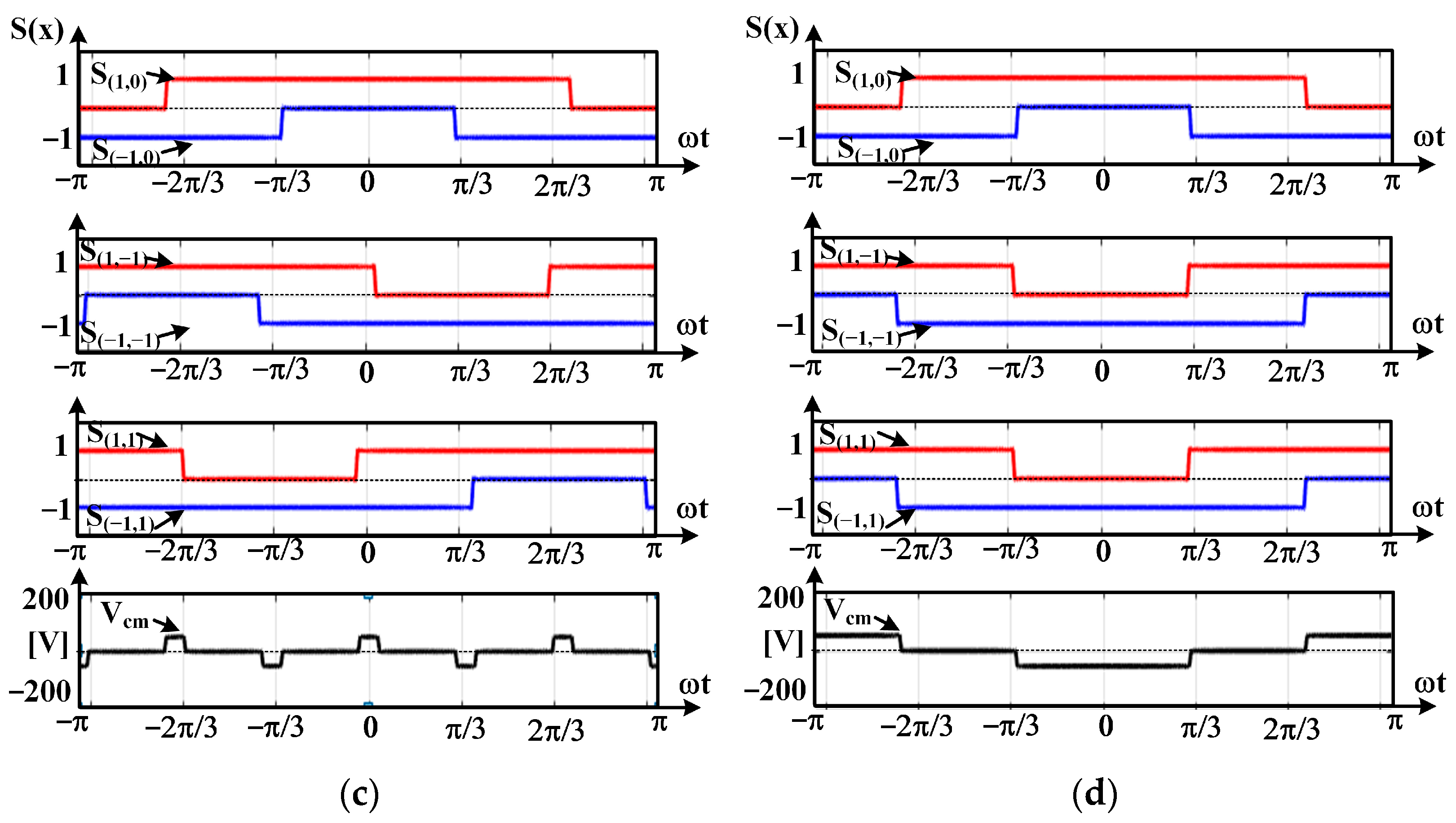
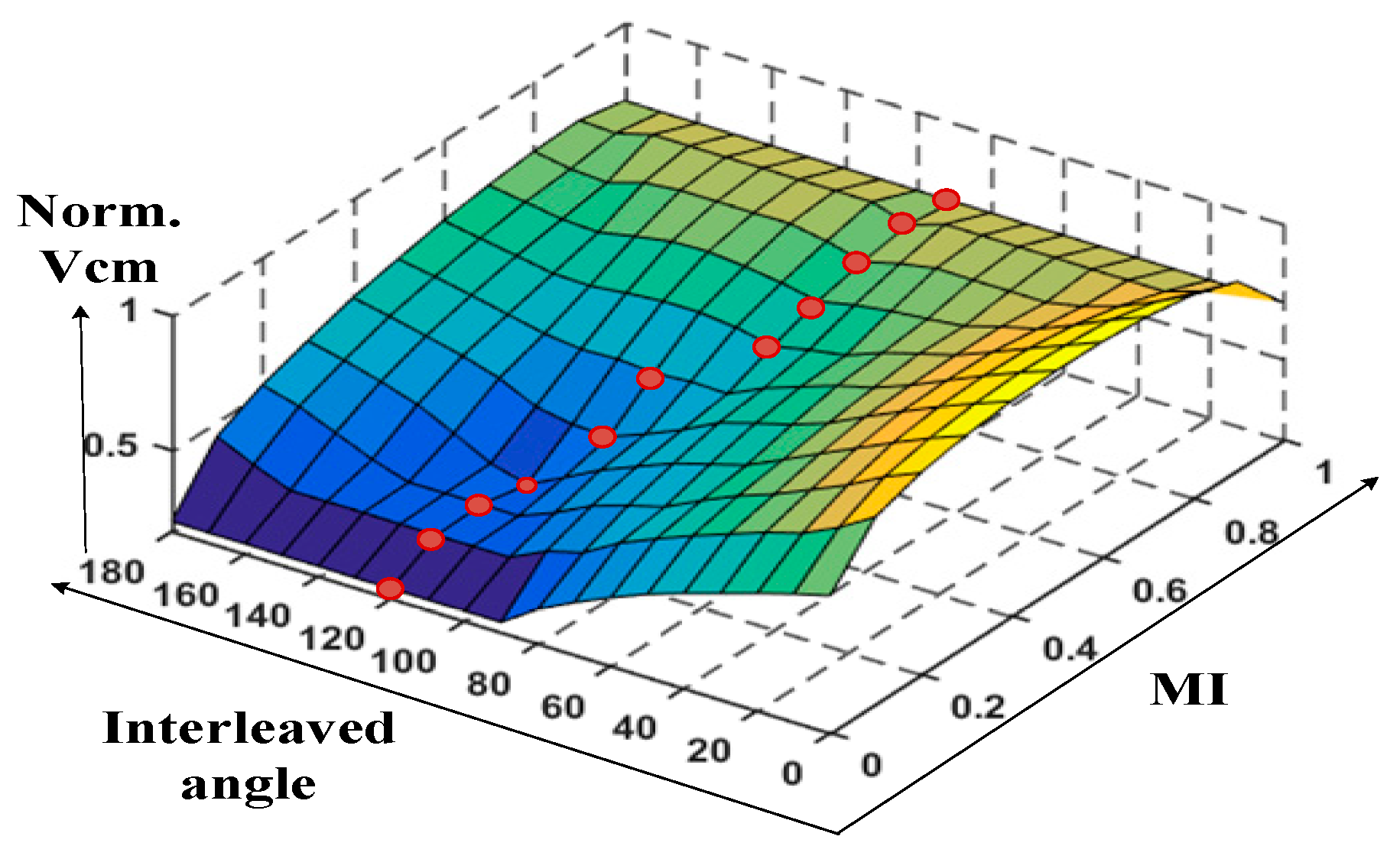
3.2. Switching Function Including the Shift Angle and MI for Minimum Common-Mode Voltage
3.3. Proposed Control Method for Phase Shift in 6-Excitation Method
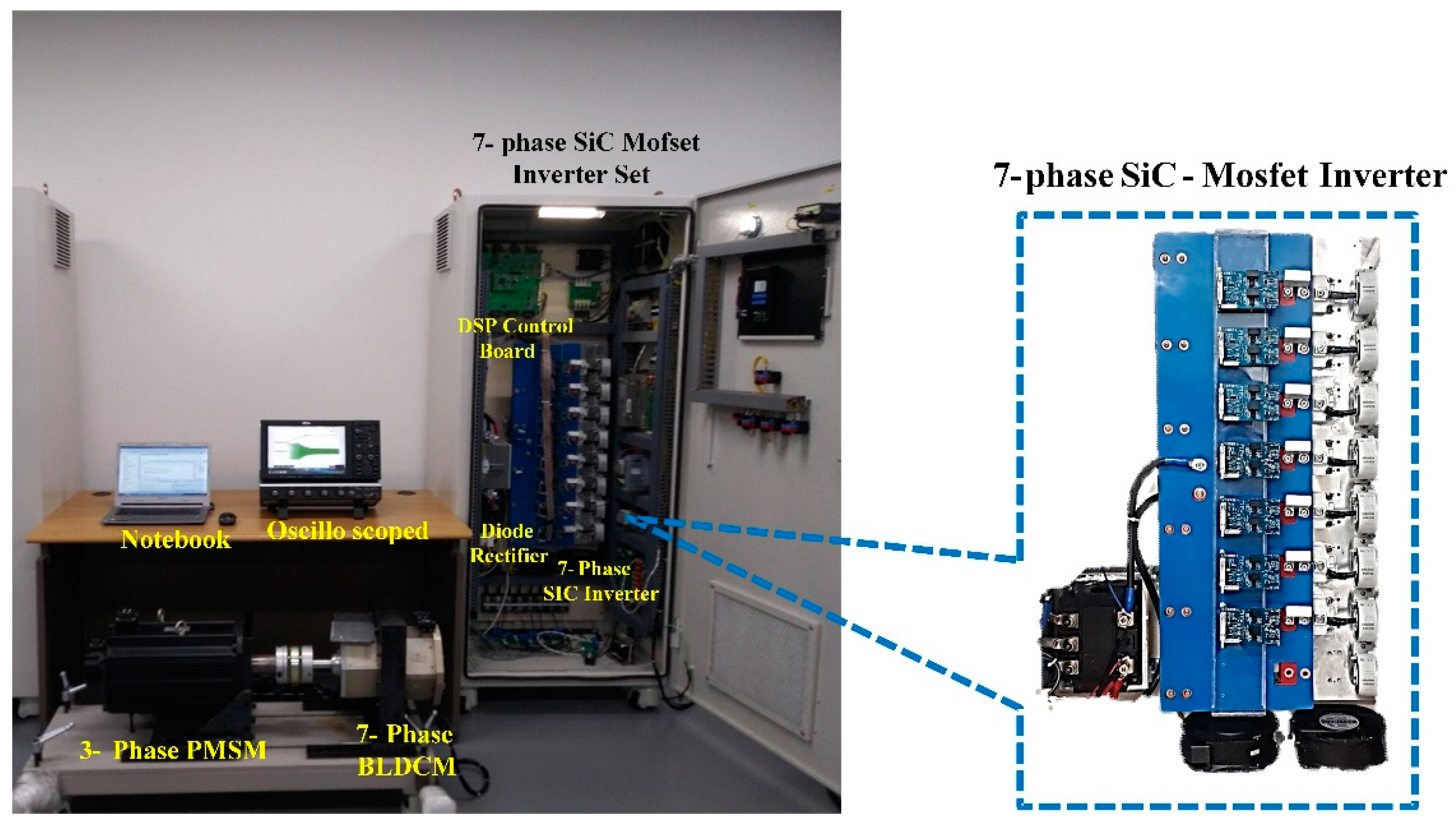
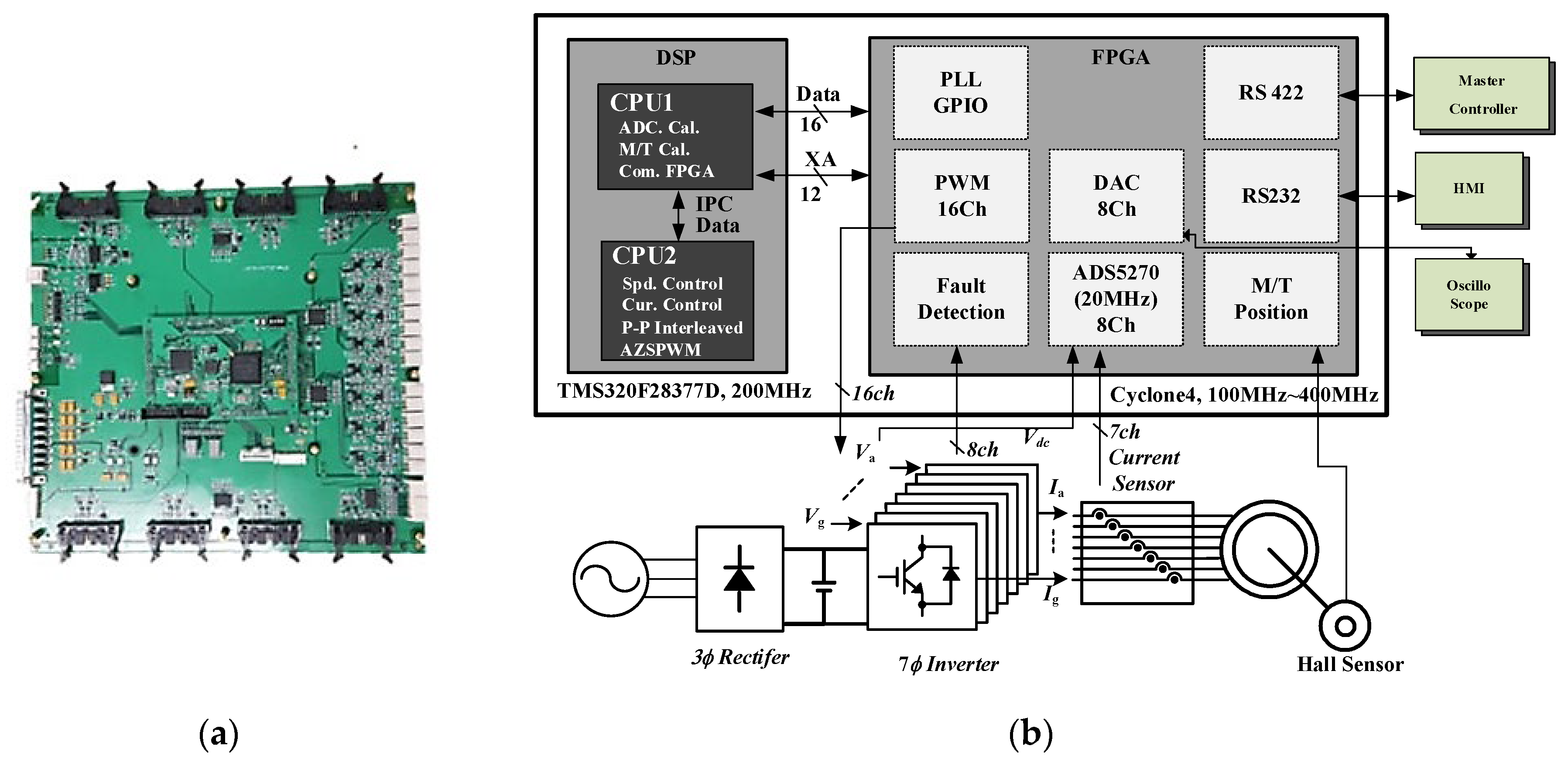
4. Experimental Set-Up and Results
4.1. System Configuration for SiC-MOSFET
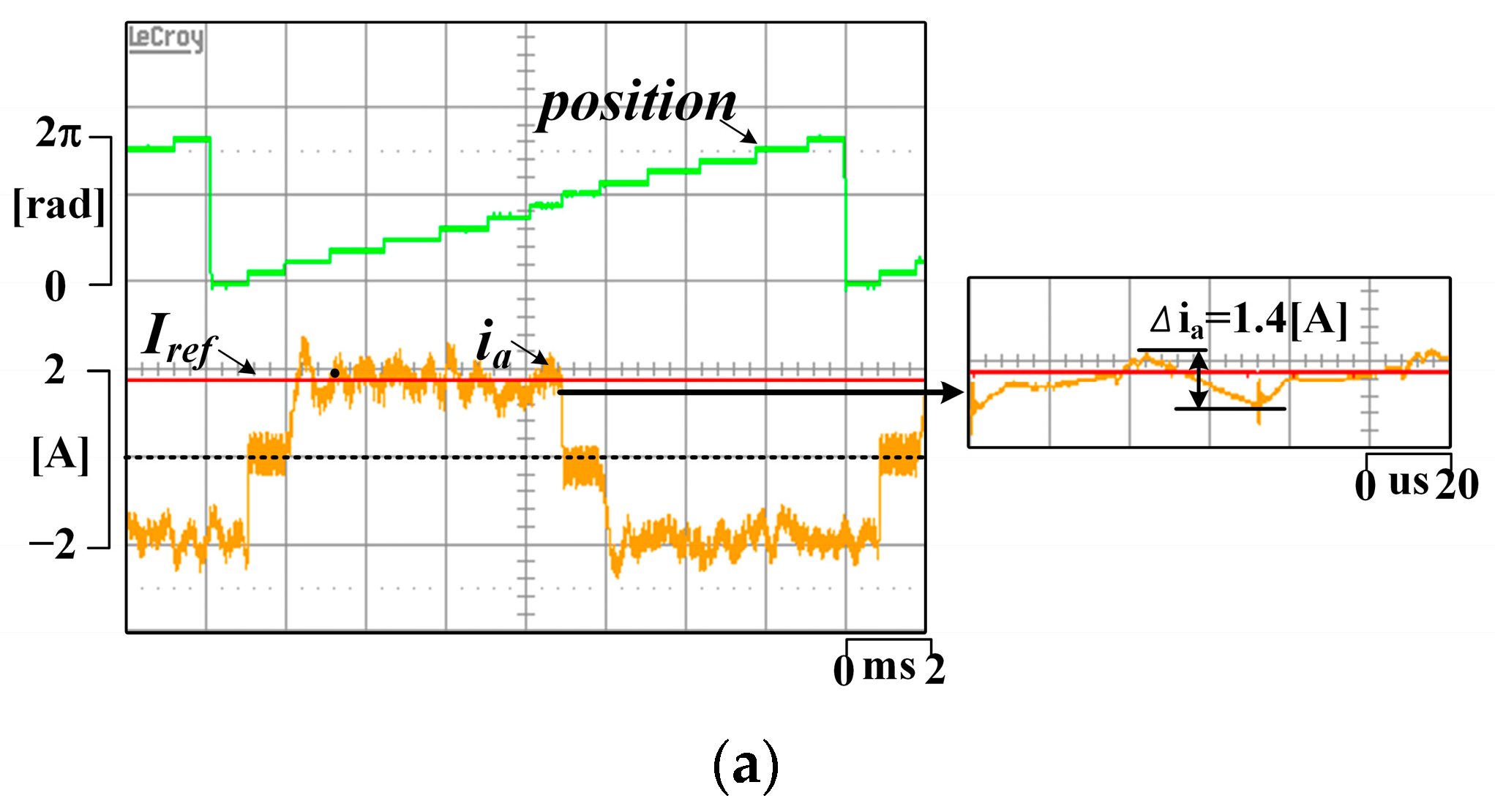
4.2. Control Performance According to Switching Frequency
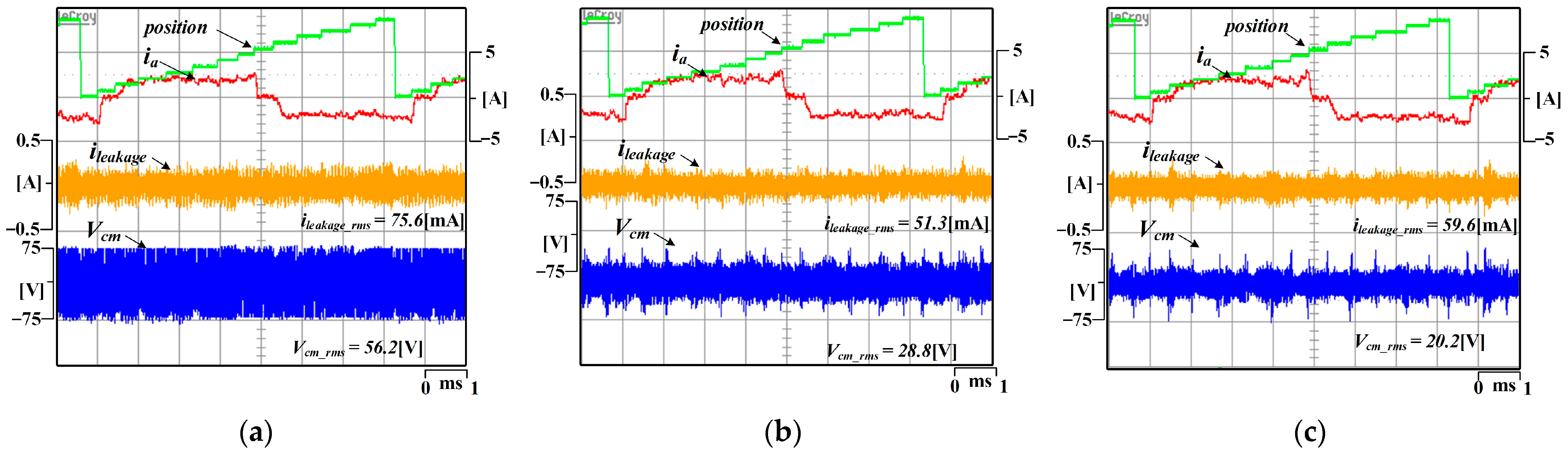
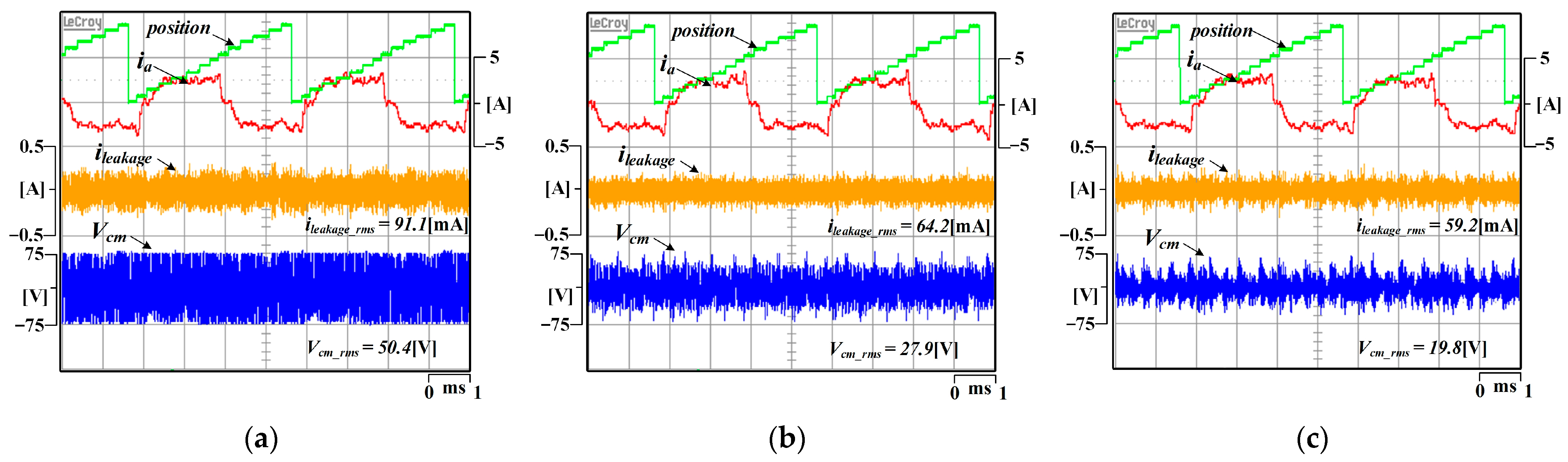
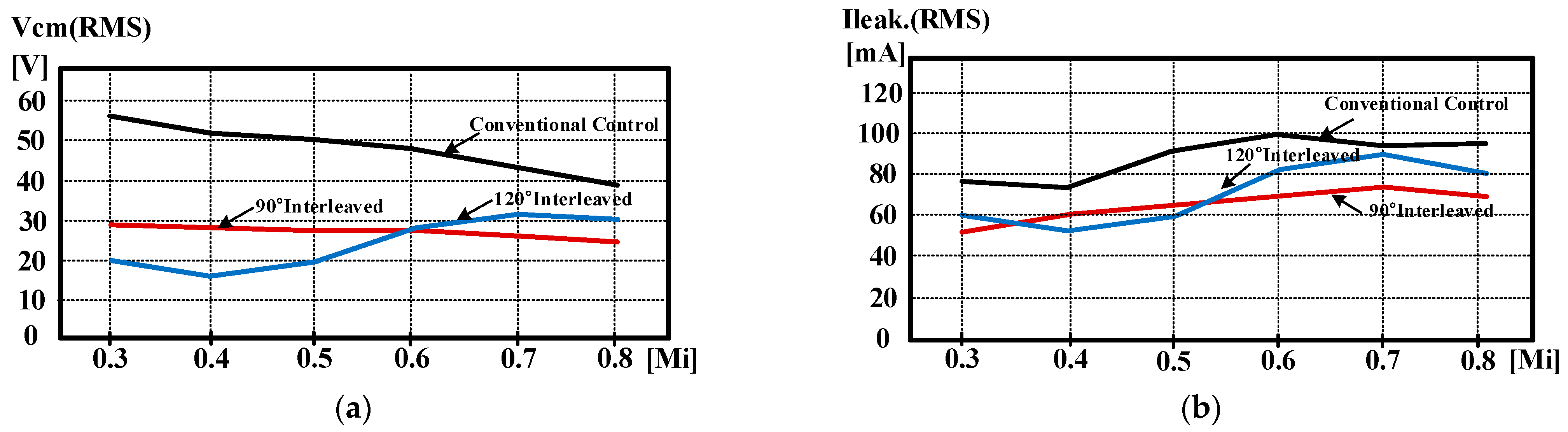
4.3. Common-Mode Voltage Generation According to the Interleaved Method and MI
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Durán, M.J.; Prieto, J.; Riveros, J.A.; Guzman, H. Space-Vector PWM With Reduced Common-Mode Voltage for Five-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2013, 60, 114–124. [Google Scholar]
- Simoes, M.G.; Vieira, P., Jr. A High-Torque Low-Speed Multiphase Brushless Machine A Perspective Application of Electric Vehicles. IEEE Trans. Ind. Electron. 2002, 49, 1154–1164. [Google Scholar]
- Gan, J.; Chau, K.T.; Chan, C.C.; Jiang, J.Z. A New Surface-Inset, Permanent-Magnet, Brushless DC Motor Drive for Electric Vehicles. IEEE Trans. Magn. 2000, 36, 3810–3818. [Google Scholar]
- Wang, H.; Zheng, X.; Yuan, X.; Wu, X. Enhanced Natural Fault-Tolerant Model Predictive Current Control in Nine-Phase Motor Drives Under Open-Phase Fault. IEEE Trans. Energy Convers. 2022, 37, 2449–2460. [Google Scholar]
- Moon, J.J.; Won, L.; Park, S.W.; Kim, J.M. Fault tolerant control method of seven-phase BLDC motor in asymmetric fault condition due to open phase. In Proceedings of the 2015 IEEE International conference on Power Electronics and ECCE Asia, Seoul, Republic of Korea, 1–5 June 2015. [Google Scholar]
- Tao, T.; Zhao, W.; Du, Y.; Zhu, Y.C. Simplified fault-tolerant model predictive control for a five-phase permanent-magnet motor with reduced computation burden. IEEE Trans Power Electron. 2022, 35, 3850–3858. [Google Scholar]
- Park, J.B.; Johnson, M.; Toliyat, H.A. A Novel Hysteresis Current Control switching Method for Torque Ripple Minimization in Multi-Phase Motors. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition of due to open phases. IEEE Trans. Ind. Appl. 2006, 42, 1062–1070. [Google Scholar]
- Park, H.S.; Park, S.W.; Kim, D.Y.; Kim, J.M. Hybrid Phase Excitation Method for Improving Efficiency of 7-Phase BLDC Motors for Ship Propulsion Systems. Trans J. Power Electron. 2019, 19, 761–770. [Google Scholar]
- Kim, T.Y.; Lee, B.K.; Won, C.Y. Modeling and simulation of multiphase BLDC motor drive systems for autonomous underwater vehicles. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007. [Google Scholar]
- Lee, M.H.; Kim, H.J.; Kim, J.M. Automatic advance angle control algorithm using anti-windup feedback voltage of PI current controller for wide range speed operation of BLDCM. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018. [Google Scholar]
- Lai, Y.S.; Chen, J.H. A New Approach to Direct Torque Control of Induction Motor Drives for Constant Inverter Switching Frequency and Torque Ripple Reduction. IEEE Trans. Energy Convers. 2001, 16, 220–227. [Google Scholar]
- Agarwal, A.K. An overview of SiC power devices. In Proceedings of the 2010 International Conference on Power, Control and Embedded Systems (ICPCES), Allahabad, India, 29 November–1 December 2010. [Google Scholar]
- Lemmon, A.; Mazzola, M.; Gafford, J.; Parker, C. Stability Considerations for Silicon Carbide Field-Effect Transistors. IEEE Trans. Power Electron. 2013, 28, 4453–4459. [Google Scholar]
- Xu, F.; Jiang, D.; Wang, J.; Wang, F.; Tobert, L.M.; Han, T.J.; Kim, S.J. Characterization of a high temperature multichip SiC JGET-based module. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011. [Google Scholar]
- Ala, G.; Giaconia, G.C.; Giglia, G.; Piazza, M.C.D.; Vitale, G. Design and Performance Evaluation of a High Power-Density EMI Filter for PWM Inverter-Fed Induction-Motor Drives. IEEE Trans. Ind. Appl. 2016, 52, 2397–2404. [Google Scholar]
- Akagi, H.; Hasegawa, H.; Doumoto, T. Design and Performance of a Passive EMI Filter for Use With a Voltage-Source PWM Inverter Having Sinusoidal Output Voltage and Zero Common-Mode Voltage. IEEE Trans. Power Electron. 2004, 19, 1069–1076. [Google Scholar]
- Son, Y.C.; Sul, S.K. A New Active Common-Mode EMI Filter for PWM Inverter. IEEE Trans. Power Electron. 2003, 18, 1309–1314. [Google Scholar]
- Son, Y.C.; Sul, S.K. Generalization of Active Filters for EMI Reduction and Harmonics Compensation. IEEE Trans. Ind. Appl. 2006, 42, 545–551. [Google Scholar]
- Ogasawara, S.; Ayano, H.; Akagi, H. An Active Circuit for Cancellation of Common-Mode Voltage Generated by a PWM Inverter. IEEE Trans. Power Electron. 1998, 13, 835–841. [Google Scholar]
- Hou, C.C.; Shih, C.C.; Cheng, P.T.; Hava, A.M. Common-Mode Voltage Reduction Pulse width Modulation Techniques for Three-Phase Grid-Connected Converters. IEEE Trans. Power Electron. 2013, 28, 1971–1979. [Google Scholar]
- Hava, A.M.; Un, E. A High-Performance PWM Algorithm of Common-Mode Voltage Reduction in Three-Phase Voltage Reduction in Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2011, 26, 1998–2008. [Google Scholar]
- Cacciato, M.; Consoli, A.; Scarcella, G.; Testa, A. Reduction of Common-Mode Currents in PWM Inverter Motor Drives. IEEE Trans. Ind. Appl. 1999, 35, 469–476. [Google Scholar]
- Un, E.; Hava, A.M. A Near-State PWM Method With Reduced Switching Losses and Reduced Common-Mode Voltage for Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Appl. 2009, 45, 782–793. [Google Scholar]
- Oriti, G.; Julian, A.L.; Lipo, T.A. A New Space Vector Modulation Strategy for Common Mode Voltage Reduction. In Proceedings of the Power Electronics Specialists Conference, St. Louis, MO, USA, 27–27 June 1997. [Google Scholar]
- Huang, J.; Shi, H. Reducing the Common-Mode Voltage through Carrier Peak Position Modulation in an SPWM Three-Phase Inverter. IEEE Trans. Power Electron. 2014, 29, 4490–4495. [Google Scholar]
- Kim, D.Y.; Ma, J.S.; Kim, J.M. Phase to Phase Interleaved Method to Reduce the Common Mode Voltage for Seven Phase BLDCM Drive. In Proceedings of the 2019 IEEE International conference on Power Electronics and ECCE Asia, Busan, Republic of Korea, 1–7 May 2019. [Google Scholar]
- Lee, H.D.; Sul, S.K. Common-Mode Voltage Reduction Method Modifying the Distribution of Zero-Voltage Vector in PWM Converter/Inverter System. IEEE Trans. Ind. Appl. 2001, 37, 1732–1738. [Google Scholar]
- Zhang, D.; Wang, F.; Burgos, R.; Lai, R.; Boroyevich, D. DC-Link Ripple Current Reduction for Paralleled Three-Phase Voltage-Source Converters With Interleaving. IEEE Trans. Power Electron. 2011, 26, 1741–1753. [Google Scholar]
- Lai, Y.S.; Shyu, F.S. Optimal Common-Mode Voltage Reduction PWM Technique for Inverter Control With Consideration of the Dead-Time Effects-Part I: Basic Development. IEEE Trans. Ind. Appl. 2004, 40, 1605–1612. [Google Scholar]
- Quan, Z.; Li, T.W. Impact of PWM Schemes on the Common Mode Voltage of Interleaved Three-Phase Two-Level Voltage Source Converters. IEEE Trans. Ind. Electron. 2019, 66, 852–864. [Google Scholar]
- Chen, H.; Zhao, H. Review on pulse-width modulation strategies for common-mode voltage reduction in three-phase voltage-source inverters. IET Power Electron. 2016, 9, 2611–2620. [Google Scholar]
- Kim, H.W.; Shin, H.K.; Mok, H.S.; Lee, Y.K.; Cho, H.Y. Novel PWM Method with Low Ripple Current for Position Control Applications of BLDC Motor. J. Power Electron. 2011, 11, 726–733. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Phase Current | ||||||
|---|---|---|---|---|---|---|---|
| ia | ib | ic | id | ie | if | ig | |
| 0 | − | − | − | 0 | + | + | + |
| 1 | 0 | − | − | − | + | + | + |
| 2 | + | − | − | − | 0 | + | + |
| 3 | + | 0 | − | − | − | + | + |
| 4 | + | + | − | − | − | 0 | + |
| 5 | + | + | 0 | − | − | − | + |
| 6 | + | + | + | − | − | − | 0 |
| 7 | + | + | + | 0 | − | − | − |
| 8 | 0 | + | + | + | − | − | − |
| 9 | − | + | + | + | 0 | − | − |
| 10 | − | 0 | + | + | + | − | − |
| 11 | − | − | + | + | + | 0 | − |
| 12 | − | − | 0 | + | + | + | − |
| 13 | − | − | − | + | + | + | 0 |
| Position | Phase | ||||||
|---|---|---|---|---|---|---|---|
| a | b | c | d | e | f | g | |
| 0 | −k | 0° | +k | X | −k | 0° | +k |
| 1 | X | −k | 0° | +k | −k | 0° | +k |
| 2 | +k | −k | 0° | +k | X | −k | 0° |
| 3 | +k | X | −k | 0° | +k | −k | 0° |
| 4 | 0° | +k | −k | 0° | +k | X | −k |
| 5 | 0° | +k | X | −k | 0° | +k | −k |
| 6 | −k | 0° | +k | −k | 0° | +k | X |
| 7 | −k | 0° | +k | X | −k | 0° | +k |
| 8 | X | −k | 0° | +k | −k | 0° | +k |
| 9 | +k | −k | 0° | +k | X | −k | 0° |
| 10 | +k | X | −k | 0° | +k | −k | 0° |
| 11 | 0° | +k | −k | 0° | +k | X | −k |
| 12 | 0° | +k | X | −k | 0° | +k | −k |
| 13 | −k | 0° | +k | −k | 0° | +k | X |
| SiC-MOSFET Inverter | Part number | CAS300M12BM2 (Cree) |
| Rated Voltage | 1200 (V) | |
| Rated Current | 300 (A) | |
| Esw | 12 (mJ) | |
| Rds(on) | 4.2 (mΩ) | |
| Switching frequency | 10~70 (kHz) | |
| DC-Link Bank | Capacitance | 1100 (μF) |
| Voltage | 150 (V) | |
| Seven-Phase BLDCM | Pole | 6 |
| Rated speed | 7000 (Rpm) | |
| Rated current | 10 (A) | |
| Stator resistance | 0.1 (Ω) | |
| Stator Inductance | 1 (mH) | |
| Back-EMF constant | 7.5 (V/krpm) |
| Rpm | Frequency | ||
|---|---|---|---|
| 10 (kHz) | 40 (kHz) | 70 (kHz) | |
| 4000 (Rpm) | 3.5 cycle | 14.2 cycle | 25 cycle |
| 7800 (Rpm) | 1.8 cycle | 7.3 cycle | 12.8 cycle |
| 10,400 (Rpm) | 1.3 cycle | 5.4 cycle | 9.6 cycle |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, Y.-D.; Kim, D.-Y.; Kim, H.-J.; Kim, J.-M. Common-Mode Voltage-Reduction Method of 7-Phase BLDC Motor Control System. Energies 2023, 16, 2097. https://doi.org/10.3390/en16052097
Son Y-D, Kim D-Y, Kim H-J, Kim J-M. Common-Mode Voltage-Reduction Method of 7-Phase BLDC Motor Control System. Energies. 2023; 16(5):2097. https://doi.org/10.3390/en16052097
Chicago/Turabian StyleSon, Yung-Deug, Dong-Youn Kim, Hyeong-Jin Kim, and Jang-Mok Kim. 2023. "Common-Mode Voltage-Reduction Method of 7-Phase BLDC Motor Control System" Energies 16, no. 5: 2097. https://doi.org/10.3390/en16052097
APA StyleSon, Y.-D., Kim, D.-Y., Kim, H.-J., & Kim, J.-M. (2023). Common-Mode Voltage-Reduction Method of 7-Phase BLDC Motor Control System. Energies, 16(5), 2097. https://doi.org/10.3390/en16052097