
Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer

 , , ,
, , ,  and
and 
Abstract
1. Introduction
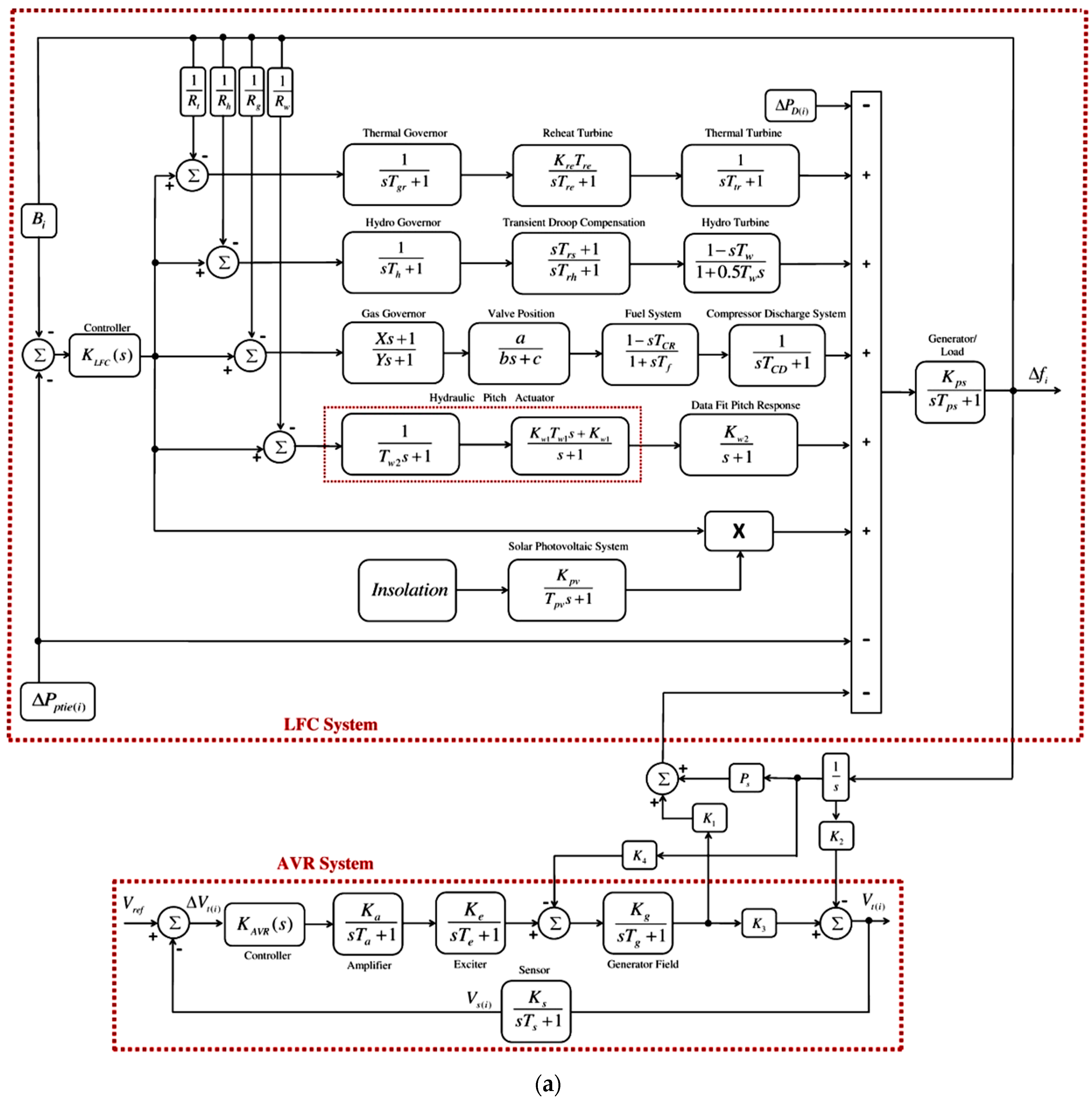
- The mathematical modeling of combined AVR-LFC loops in the proposed four-area IPS, with five generation units, including two renewable energy sources in each area.
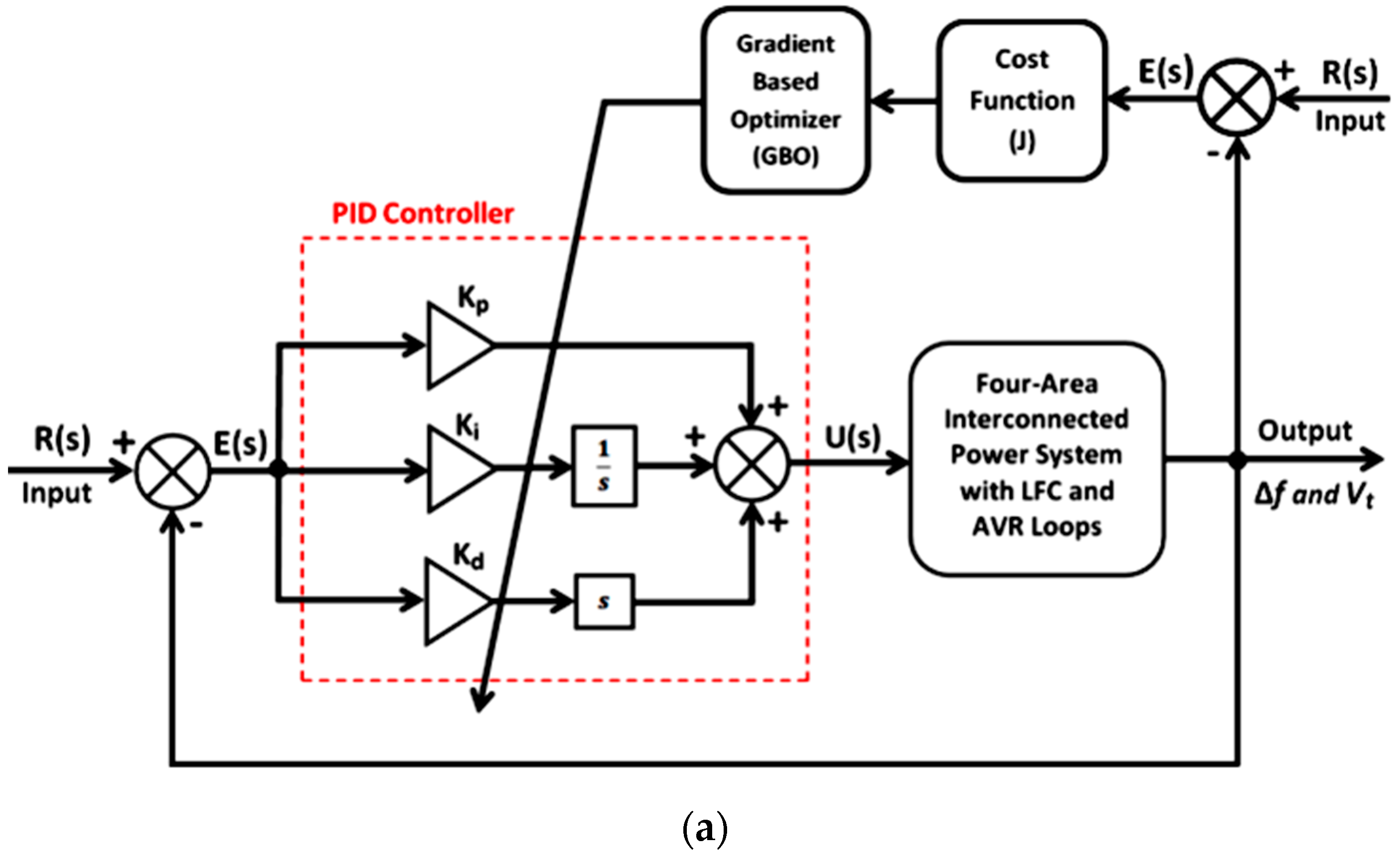
- The mathematical modeling of a proposed PID controller with four-area IPS.
- The formulations of GBO-based fitness functions for the optimal tuning of the PID controller.
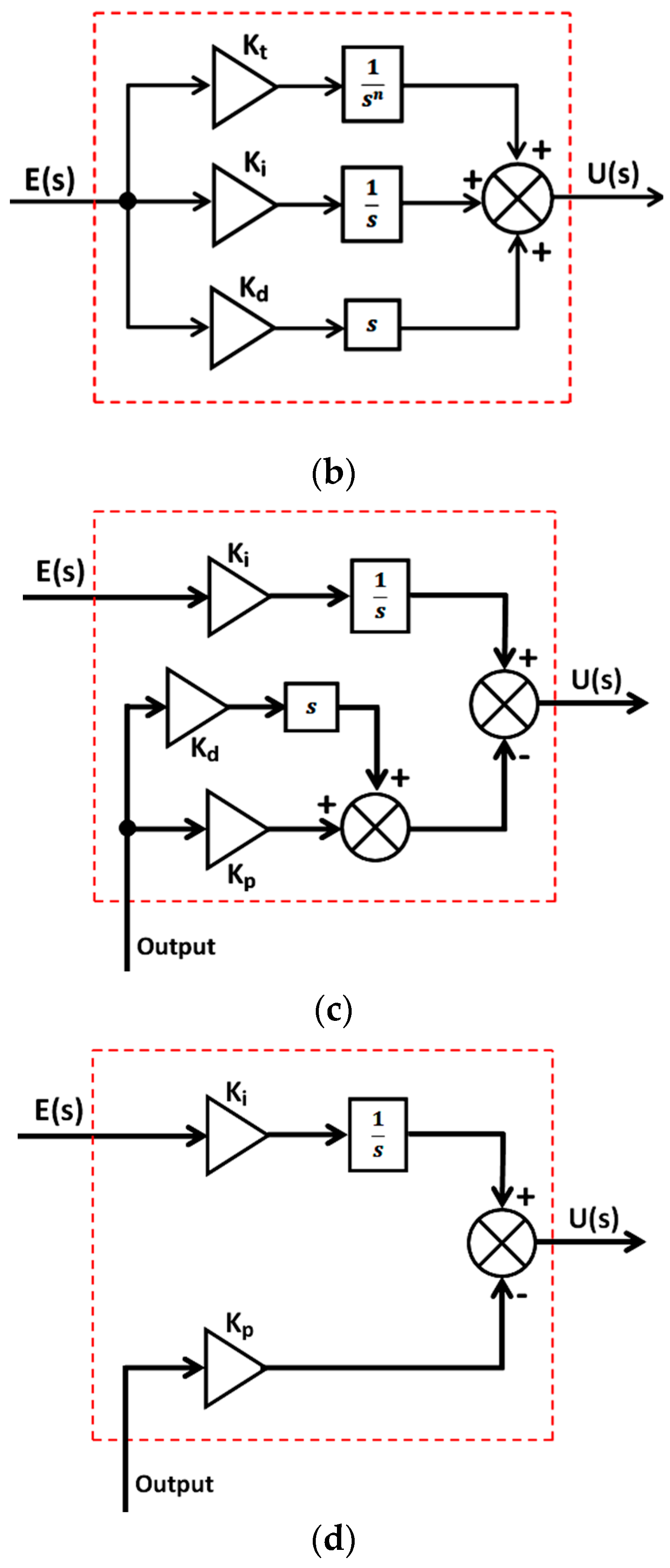
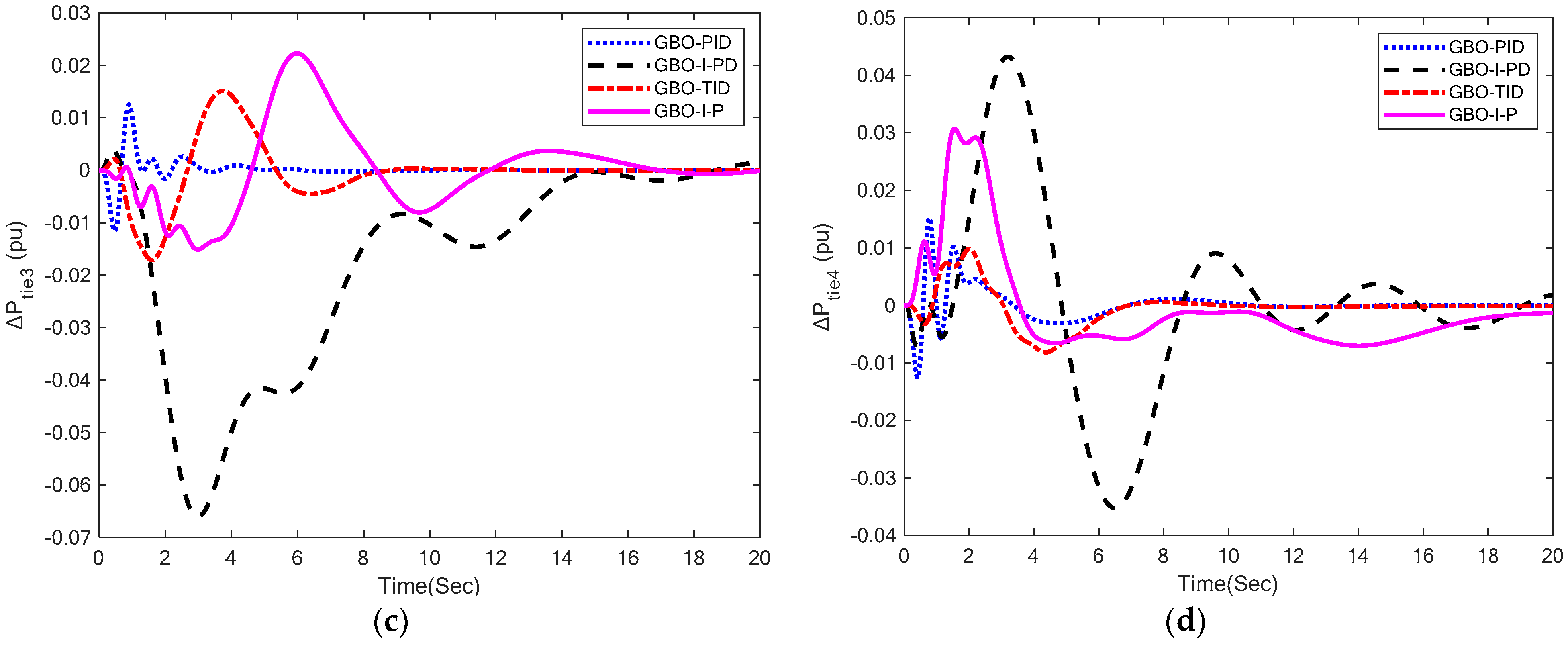
- To evaluate the performance of proposed control methodology, an extensive comparison was made between GBO-PID and other controllers such as GBO-I-PD, GBO-TID, and GBO-I-P in a four-area IPS.
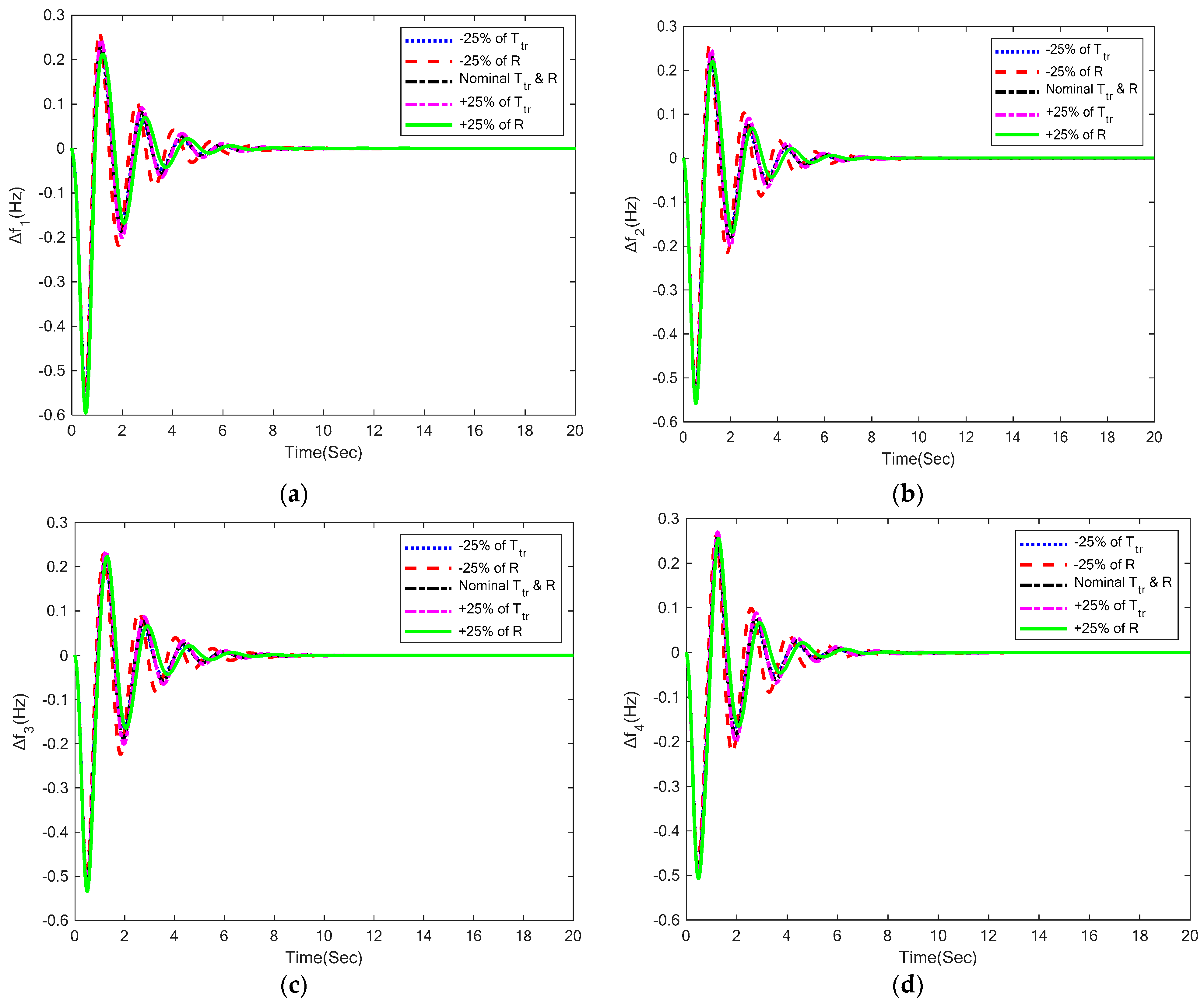
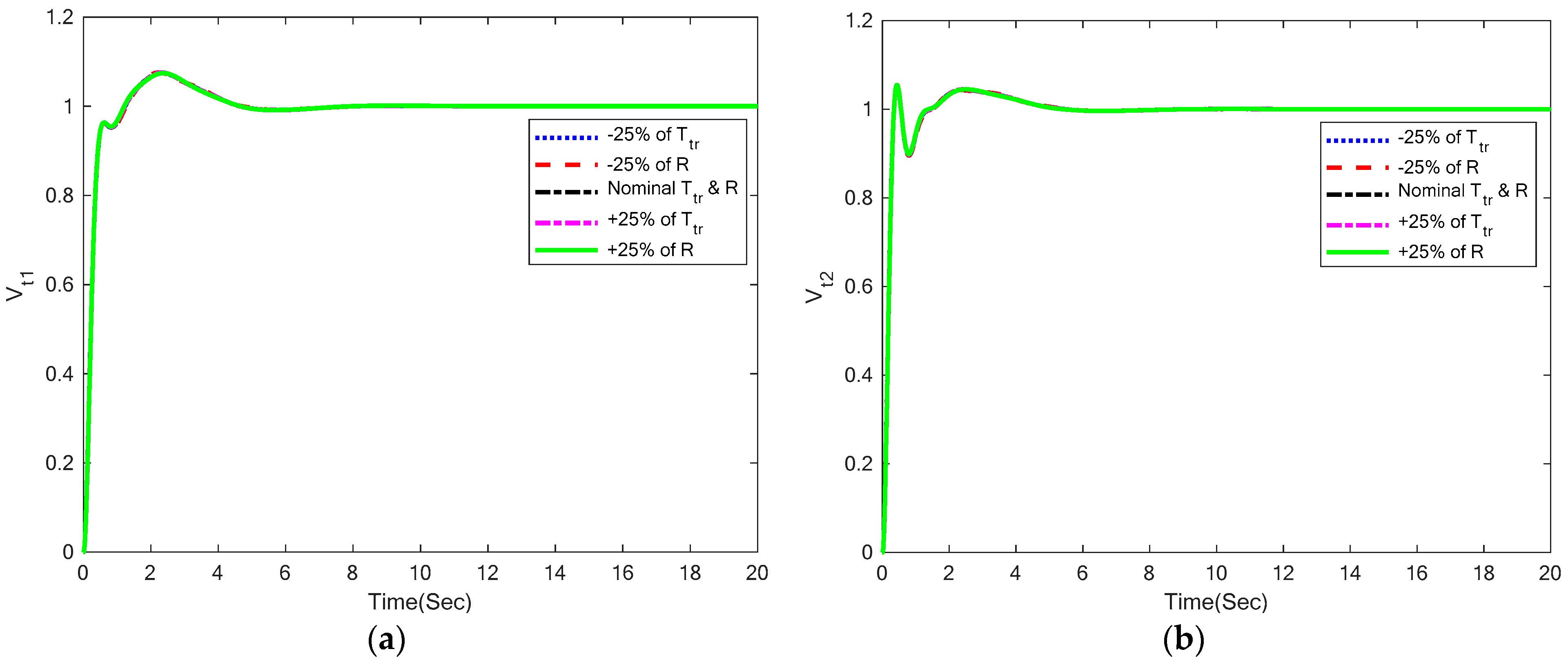
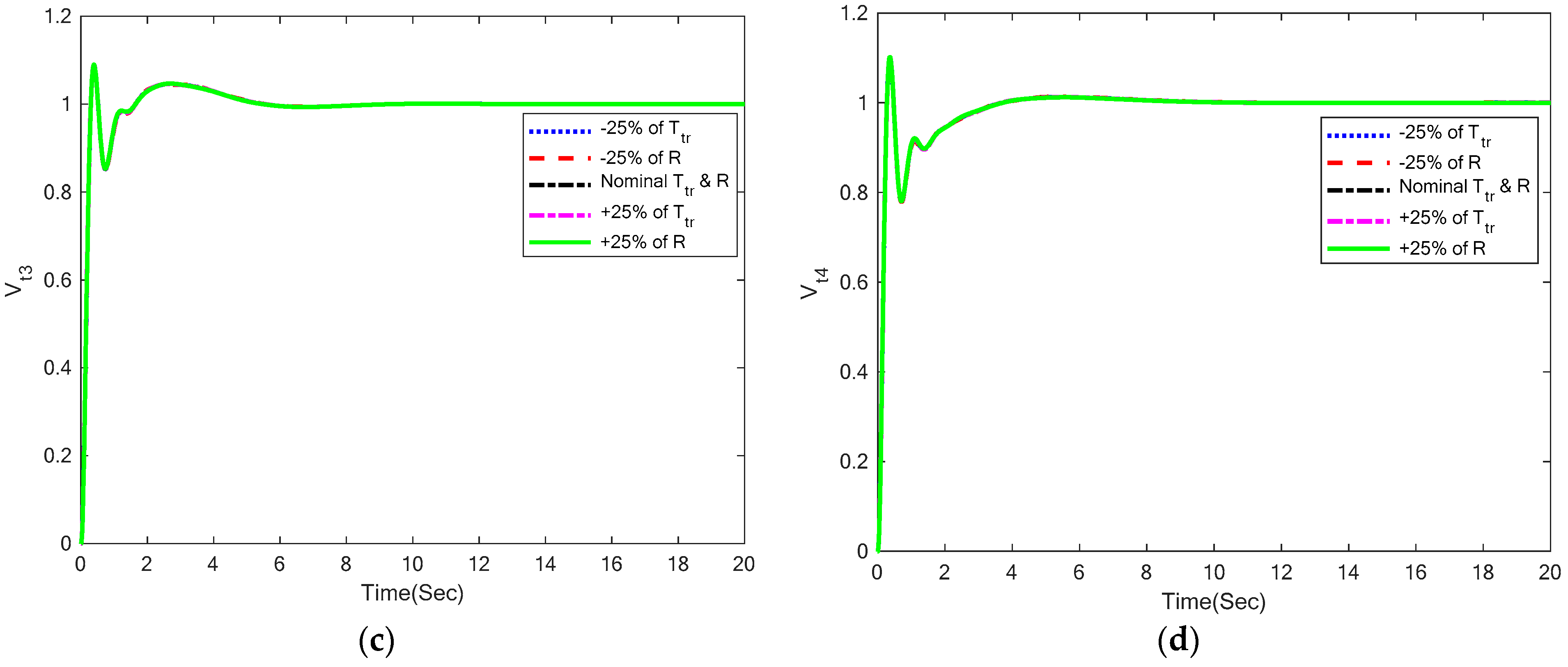
- The robustness of the proposed GBO-PID control methodology was validated by performing a sensitivity analysis by changing the parameters of a four-area IPS over a range of approximately ±25%.
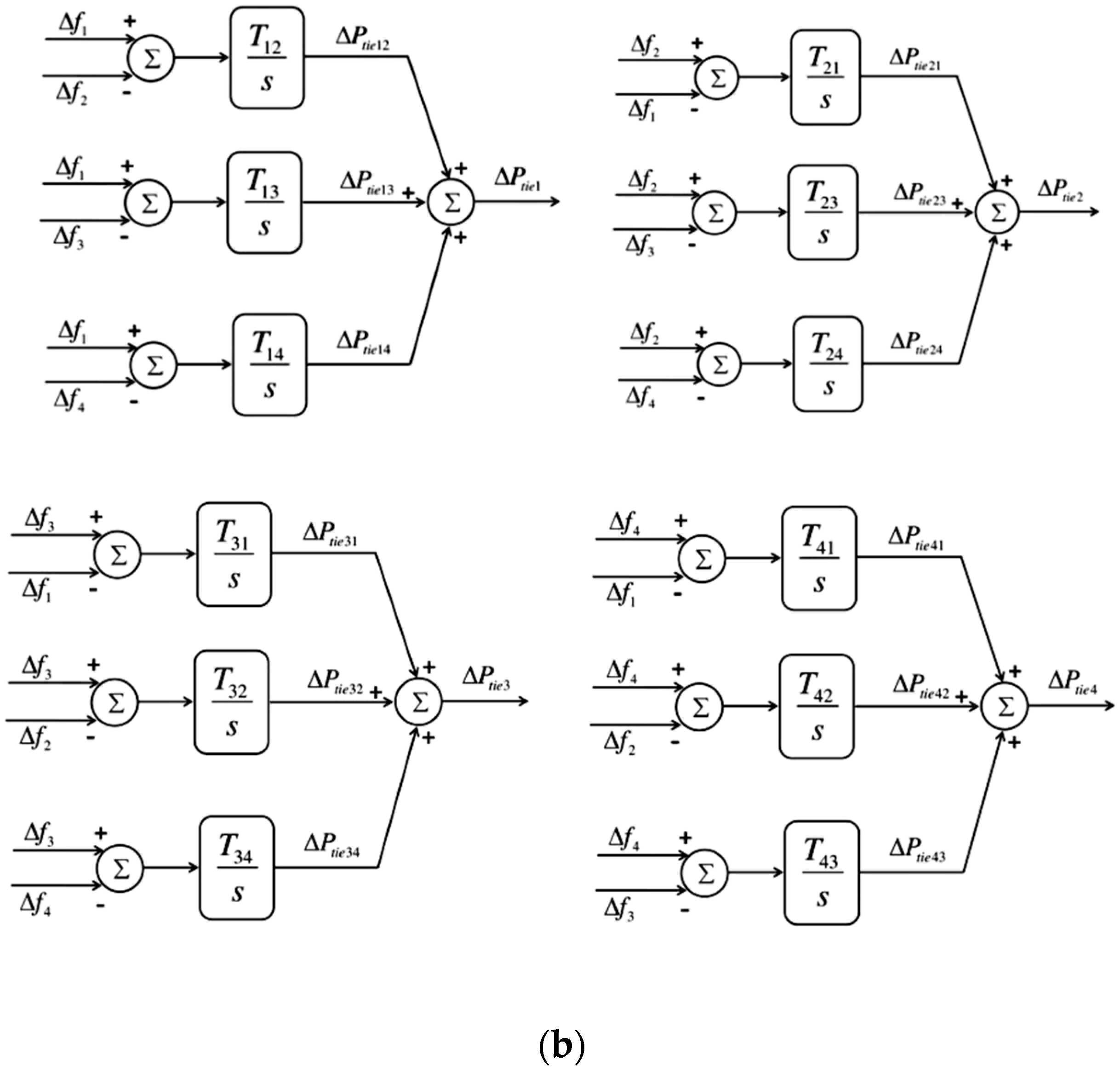
2. Power System Modeling
3. Proposed Control Methodology
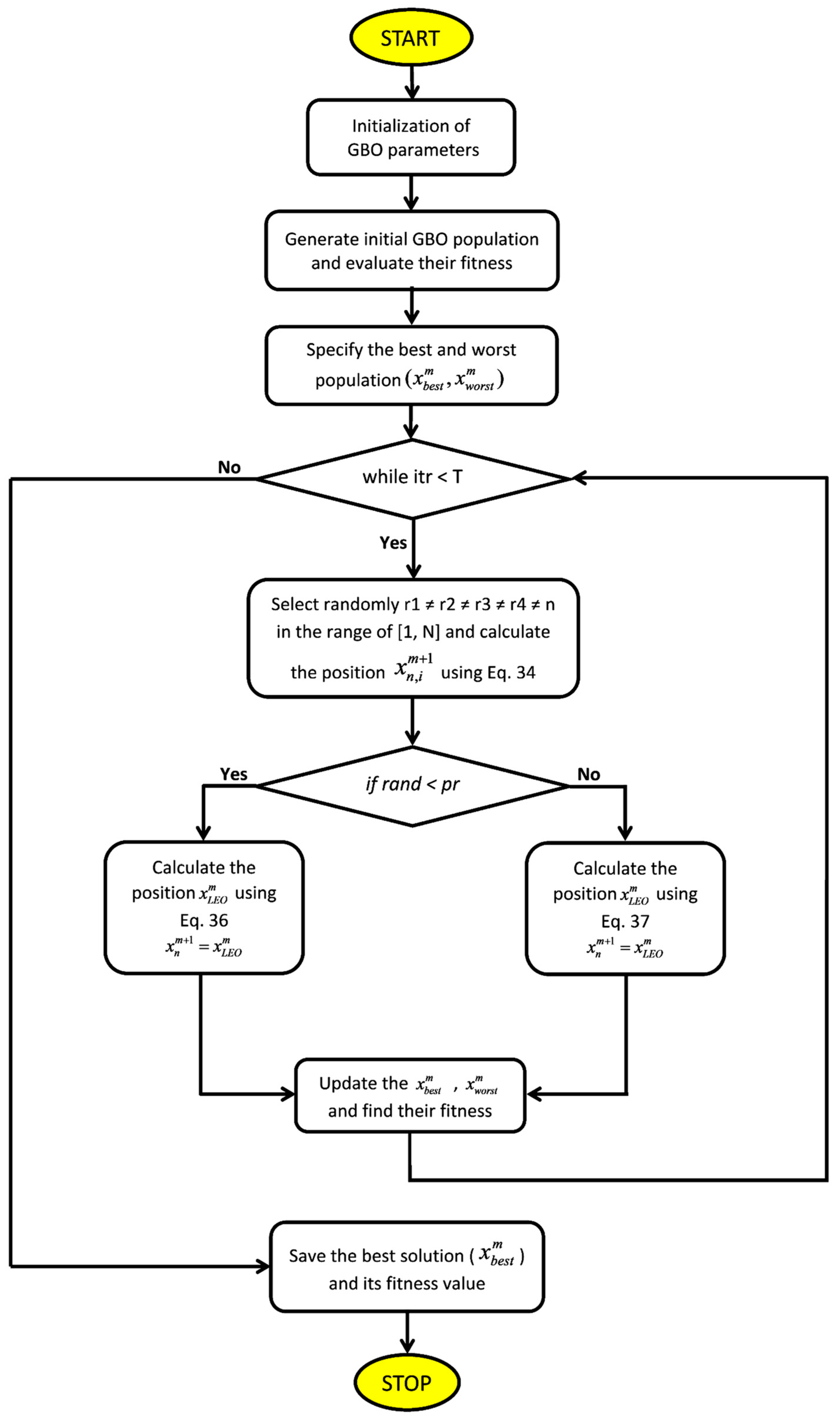
4. Gradient-Based Optimizer (GBO)
- A.
- GBO INITIALIZATION
- B.
- GRADIENT SEARCH RULE (GSR)
- C.
- LOCAL ESCAPING OPERATOR (LEO)
5. Simulations and Discussion of Results
- A.
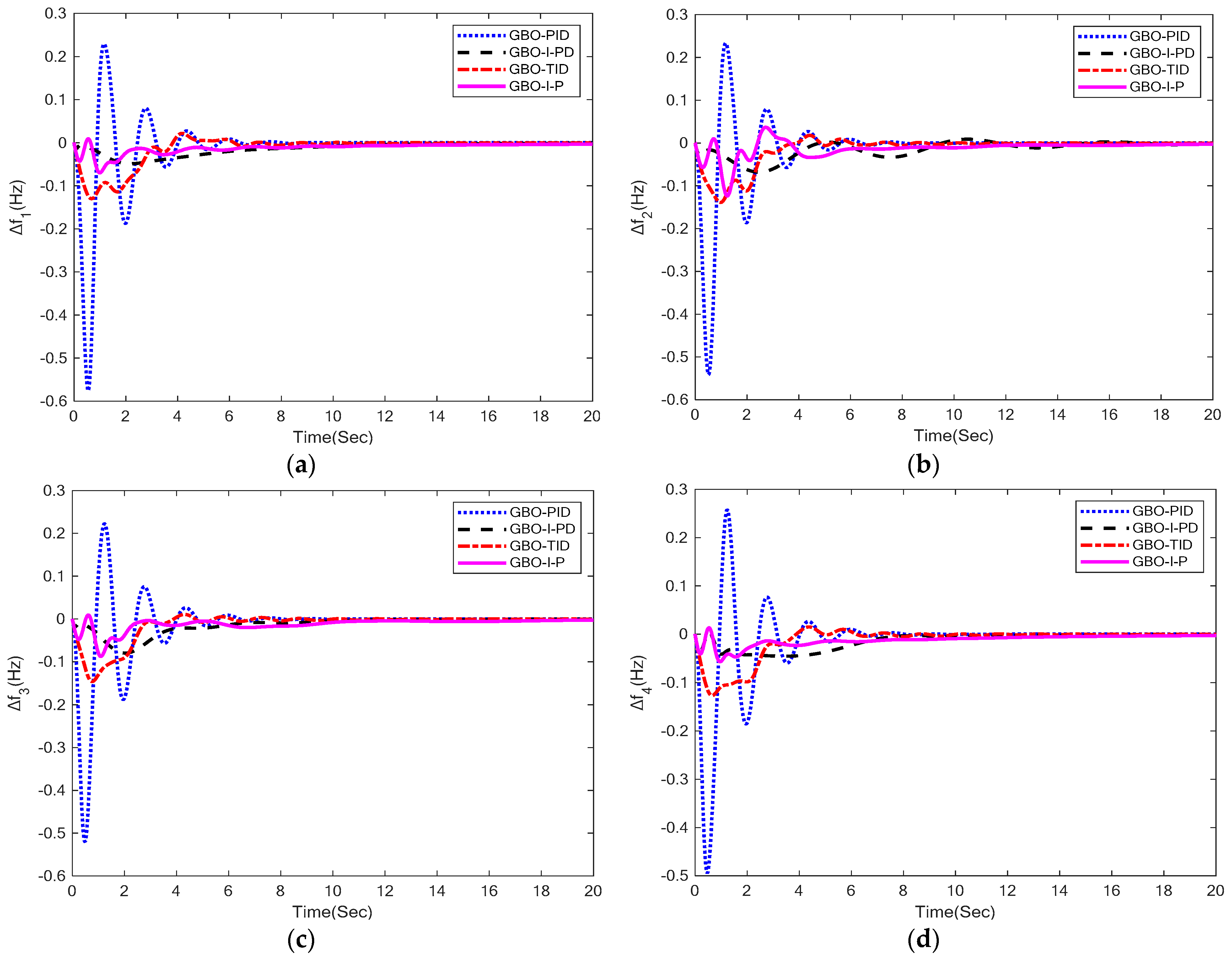
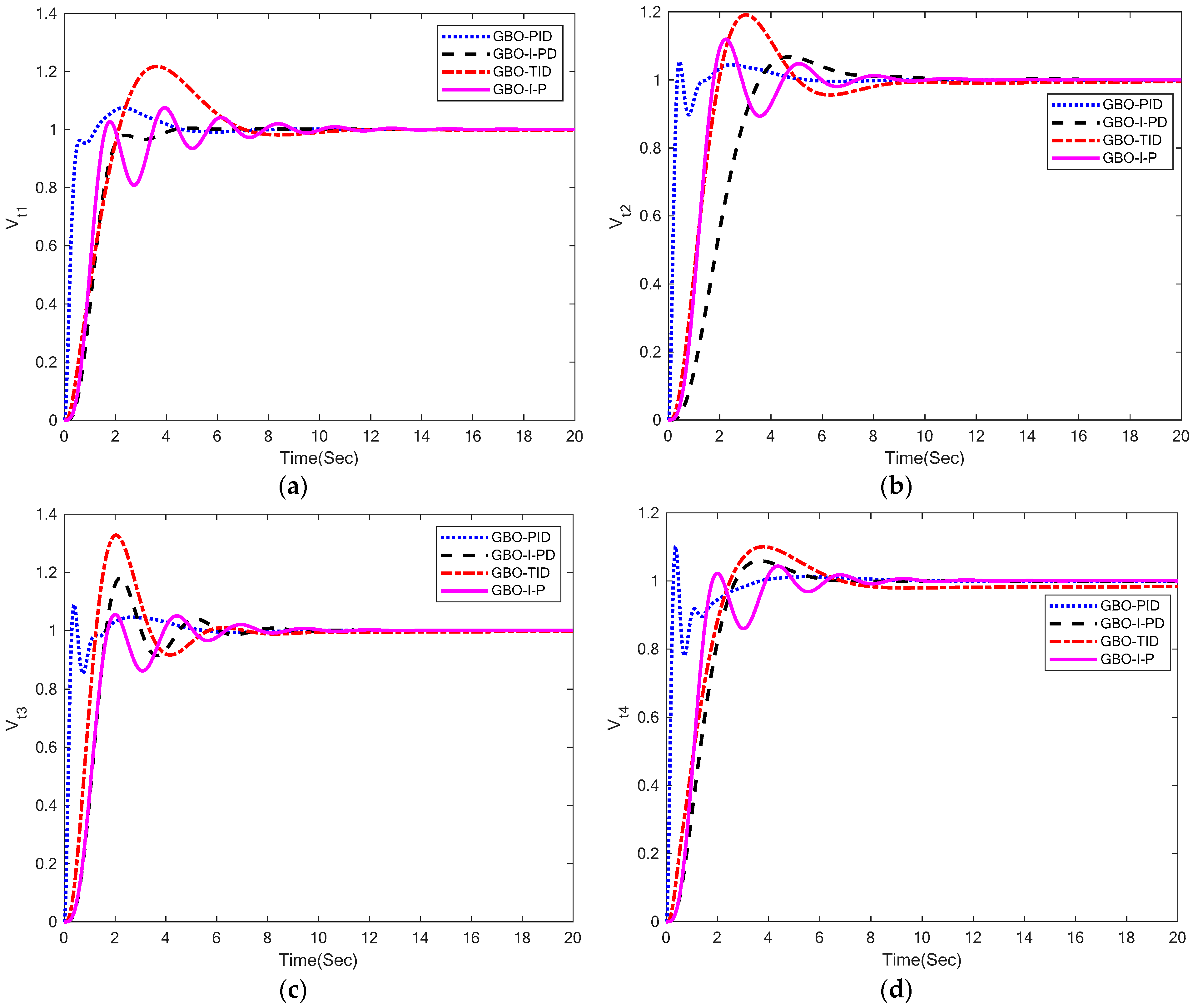
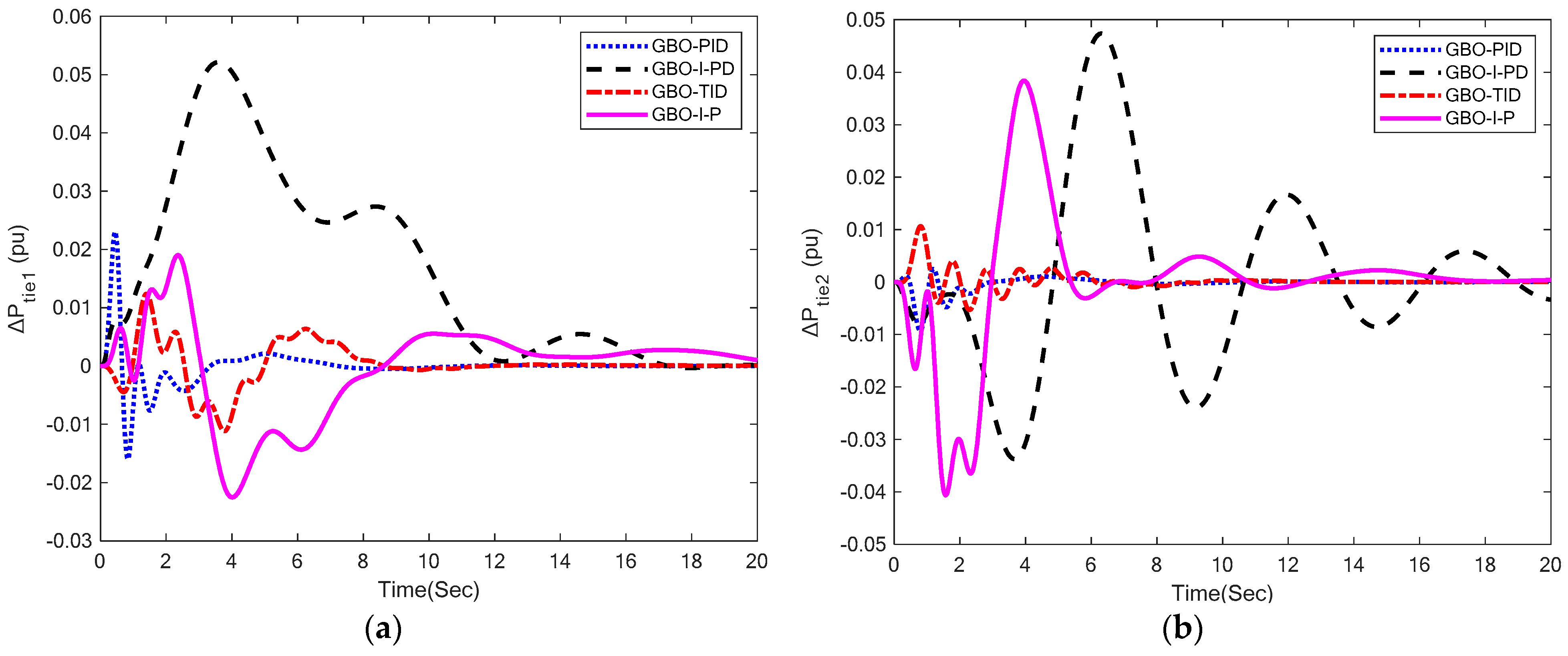
- FOUR-AREA IPS WITH COMBINED AVR-LFC
- B.
- SENSITIVITY ANALYSIS
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Parameter | Value |
| B | 0.045 |
| Rt | 2.4 |
| Rh | 2.4 |
| Rg | 2.4 |
| Rw | 2.4 |
| Rg | 2.4 |
| Tgr | 0.08 |
| Tre | 10 |
| Kre | 0.3 |
| Ttr | 0.3 |
| Th | 0.3 |
| Trs | 5 |
| Trh | 28.75 |
| Tw | 0.025 |
| X | 0.6 |
| Y | 1 |
| a | 1 |
| b | 0.05 |
| c | 1 |
| TCR | 0.01 |
| Tf | 0.23 |
| TCD | 0.2 |
| D | 0.0145 |
| H | 5 |
| f | 60 |
| Kps = 1/D | 68.97 |
| Tps = 2*H/f*D | 11.49 |
| K1 | 0.2 |
| K2 | 0.1 |
| K3 | 0.5 |
| K4 | 1.4 |
| Ps | 1.5 |
| Ka | 10 |
| Ta | 0.1 |
| Ke | 1 |
| Te | 0.4 |
| Kg | 0.8 |
| Tg | 1.4 |
| Ks | 1 |
| Ts | 0.05 |
| Tw1 | 0.6 |
| Tw2 | 0.041 |
| Kw1 | 1.25 |
| Kw2 | 1.4 |
| Tpv | 1.8 |
| Kpv | 1 |
| T12 | 0.545 |
| T13 | 0.545 |
| T14 | 0.545 |
| T21 | 0.545 |
| T23 | 0.545 |
| T24 | 0.545 |
| T31 | 0.545 |
| T32 | 0.545 |
| T34 | 0.545 |
| T41 | 0.545 |
| T42 | 0.545 |
| T43 | 0.545 |
References
- Ali, T.; Malik, S.A.; Hameed, I.A.; Daraz, A.; Mujlid, H.; Azar, A.T. Load Frequency Control and Automatic Voltage Regulation in a Multi-Area Interconnected Power System Using Nature-Inspired Computation-Based Control Methodology. Sustainability 2022, 14, 12162. [Google Scholar] [CrossRef]
- Ali, T.; Malik, S.A.; Daraz, A.; Aslam, S.; Alkhalifah, T. Dandelion Optimizer-Based Combined Automatic Voltage Regulation and Load Frequency Control in a Multi-Area, Multi-Source Interconnected Power System with Nonlinearities. Energies 2022, 15, 8499. [Google Scholar] [CrossRef]
- Vijaya Chandrakala, K.R.M.; Balamurugan, S. Simulated annealing based optimal frequency and terminal voltage control of multi source multi area system. Int. J. Electr. Power Energy Syst. 2016, 78, 823–829. [Google Scholar] [CrossRef]
- Gupta, M.; Srivastava, S.; Gupta, J.R.P. A Novel Controller for Model with Combined LFC and AVR Loops of Single Area Power System. J. Inst. Eng. Ser. B 2016, 97, 21–29. [Google Scholar] [CrossRef]
- Sharma, D.; Kushwaha, V.; Pandey, K.; Rani, N. Intelligent AVR Control of a Single Thermal Area Combined with LFC Loop. Adv. Intell. Syst. Comput. 2018, 624, 779–789. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C. Coordinated performance of interline power flow controller and superconducting magnetic energy storage in combined ALFC and AVR system under deregulated environment. J. Renew. Sustain. Energy 2018, 10, 044102. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K. Combined load frequency and terminal voltage control of power systems using moth flame optimization algorithm. J. Electr. Syst. Inf. Technol. 2019, 6, 1–24. [Google Scholar] [CrossRef]
- Sahani, A.K.; Raj, U.; Shankar, R.; Mandal, R.K. Firefly Optimization Based Control Strategies for Combined Load Frequency Control and Automatic Voltage Regulation for Two-Area Interconnected Power System. Int. J. Electr. Eng. Inform. 2019, 11, 747–758. [Google Scholar] [CrossRef]
- Morsali, J.; Esmaeili, Z. Proposing a New Hybrid Model for LFC and AVR Loops to Improve Effectively Frequency Stability Using Coordinative CPSS. In Proceedings of the 2020 28th Iranian Conference on Electrical Engineering (ICEE), Tabriz, Iran, 4–6 August 2020. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Frequency and voltage stabilisation in combined load frequency control and automatic voltage regulation of multiarea system with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Combined frequency and voltage stabilisation of multi-area multisource system by DE-AEFA optimised PID controller with coordinated performance of IPFC and RFBs. Int. J. Ambient. Energy 2020, 43, 3815–3831. [Google Scholar] [CrossRef]
- Prakash, A.; Parida, S.K. Combined Frequency and Voltage Stabilization of Thermal-Thermal System with UPFC and RFB. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar] [CrossRef]
- Nahas, N.; Abouheaf, M.; Darghouth, M.N.; Sharaf, A. A multi-objective AVR-LFC optimization scheme for multi-area power systems. Electr. Power Syst. Res. 2021, 200, 107467. [Google Scholar] [CrossRef]
- Kalyan, C.N.S. UPFC and SMES based Coordinated Control Strategy for Simultaneous Frequency and Voltage Stability of an Interconnected Power System. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021. [Google Scholar] [CrossRef]
- Anusha, P.; Patra, S.; Roy, A.; Saha, D. Combined Frequency and Voltage Control of a Deregulated Hydro-Thermal Power System employing FA based Industrial Controller. In Proceedings of the 2021 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 1–3 December 2021; pp. 848–853. [Google Scholar] [CrossRef]
- Oladipo, S.; Sun, Y.; Wang, Z. An effective hFPAPFA for a PIDA-based hybrid loop of Load Frequency and terminal voltage regulation system. In Proceedings of the 2021 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 23–27 August 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Ramoji, S.K.; Saikia, L.C. Optimal Coordinated Frequency and Voltage Control of CCGT-Thermal Plants with TIDF Controller. IETE J. Res. 2021, 1–18. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Aftab, M.A.; Hussain, S.M.S. Performance study of ADRC and PID for concurrent Frequency-Voltage Control of Electric Vehicle Incorporated Hybrid Power System. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022. [Google Scholar] [CrossRef]
- Ramoji, S.K.; Saikia, L.C.; Dekaraja, B.; Behera, M.K.; Bhagat, S.K. Performance Comparison of Various Tilt Controllers in Coalesced Voltage and Frequency Regulation of Multi-Area Multi-Unit Power System. In Proceedings of the 2022 IEEE Delhi Section Conference (DELCON), New Delhi, India, 11–23 February 2022. [Google Scholar] [CrossRef]
- Dekaraja, B.; Saikia, L.C.; Ramoji, S.K.; Behera, M.K.; Bhagat, S.K. Impact of RFB and HVDC link on Combined ALFC-AVR Studies of a GTPP Integrated Hydro-thermal Systems Using a Cascade Fuzzy PD-TID Controller. In Proceedings of the 2022 4th International Conference on Energy, Power and Environment (ICEPE), Shillong, India, 29 April–1 May 2022. [Google Scholar] [CrossRef]
- Dekaraja, B.; Saikia, L.C.; Ramoji, S.K. Combined ALFC-AVR Control of Diverse Energy Source Based Interconnected Power System using Cascade Controller. In Proceedings of the 2022 International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), Hyderabad, India, 21–23 July 2022. [Google Scholar] [CrossRef]
- Dekaraja, B.; Saikia, L.C.; Ramoji, S.K.; Behera, M.K.; Bhagat, S.K. Performance Analysis of Diverse Energy Storage on Combined ALFC and AVR Control of Multiarea Multiunit System with AC/HVDC interconnection. IFAC-PapersOnLine 2022, 55, 479–485. [Google Scholar] [CrossRef]
- Fayek, H.H.; Rusu, E. Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability 2022, 14, 9428. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 15, 629. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Waseem, A.; Azar, A.T.; Haq, I.U.; Ullah, Z.; Aslam, S. Automatic Generation Control of Multi-Source Interconnected Power System Using FOI-TD Controller. Energies 2021, 14, 5867. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Laghari, G.F.; Mansor, N.N. Fitness Dependent Optimizer-Based Automatic Generation Control of Multi-Source Interconnected Power System With Non-Linearities. IEEE Access 2020, 8, 100989–101003. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Zafar, F.; Mansor, N.N. Improved-Fitness Dependent Optimizer Based FOI-PD Controller for Automatic Generation Control of Multi-Source Interconnected Power System in Deregulated Environment. IEEE Access 2020, 8, 197757–197775. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Azar, A.T.; Aslam, S.; Alkhalifah, T.; Alturise, F. Optimized Fractional Order Integral-Tilt Derivative Controller for Frequency Regulation of Interconnected Diverse Renewable Energy Resources. IEEE Access 2022, 10, 43514–43527. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Haq, I.U.; Khan, K.B.; Laghari, G.F.; Zafar, F. Modified PID controller for automatic generation control of multi-source interconnected power system using fitness dependent optimizer algorithm. PLoS ONE 2020, 15, e0242428. [Google Scholar] [CrossRef]
- Coban, H.H.; Rehman, A.; Mousa, M. Load Frequency Control of Microgrid System by Battery and Pumped-Hydro Energy Storage. Water 2022, 14, 1818. [Google Scholar] [CrossRef]
- Tabak, A. Maiden application of fractional order PID plus second order derivative controller in automatic voltage regulator. Int. Trans. Electr. Energy Syst. 2021, 31, e13211. [Google Scholar] [CrossRef]
- Tabak, A. A novel fractional order PID plus derivative (PIλDµDµ2) controller for AVR system using equilibrium optimizer. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2021, 40, 722–743. [Google Scholar] [CrossRef]
- Krishna, A.K.V.; Tyagi, T. Improved Whale Optimization Algorithm for Numerical Optimization. Adv. Intell. Syst. Comput. 2021, 1086, 59–71. [Google Scholar] [CrossRef]
- Altbawi, S.M.A.; Bin Mokhtar, A.S.; Jumani, T.A.; Khan, I.; Hamadneh, N.N.; Khan, A. Optimal design of Fractional order PID controller based Automatic voltage regulator system using gradient-based optimization algorithm. J. King Saud Univ. Eng. Sci. 2021. [Google Scholar] [CrossRef]
- Ayas, M.S.; Sahin, E. FOPID controller with fractional filter for an automatic voltage regulator. Comput. Electr. Eng. 2021, 90, 106895. [Google Scholar] [CrossRef]
- Rahman, C.M.; Rashid, T.A. A new evolutionary algorithm: Learner performance based behavior algorithm. Egypt. Inform. J. 2021, 22, 213–223. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Transient search optimization: A new meta-heuristic optimization algorithm. Appl. Intell. 2020, 50, 3926–3941. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, T.; Ma, S.; Wang, M. Sea-horse optimizer: A novel nature-inspired meta-heuristic for global optimization problems. Appl. Intell. 2022, 1–28. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, T.; Ma, S.; Chen, M. Dandelion Optimizer: A nature-inspired metaheuristic algorithm for engineering applications. Eng. Appl. Artif. Intell. 2022, 114, 105075. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Hassan, M.; Kamel, S.; El-Dabah, M.; Rezk, H. A Novel Solution Methodology Based on a Modified Gradient-Based Optimizer for Parameter Estimation of Photovoltaic Models. Electronics 2021, 10, 472. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference of Paper | Area of Research | Tuning Method | Suggested Controller | Generation Sources | Year | Generation Sources in All Areas | Covered Area | Additional Incorporation for Improvements | Nonlinearities |
|---|---|---|---|---|---|---|---|---|---|
| [1] | LFC and AVR | AOA, LPBO, MPSO | PI-PD | - | 2022 | 2, 3 | 2, 3 | - | - |
| [2] | LFC and AVR | DO | PI-PD | Reheat thermal, Hydro, and Gas | 2022 | 6 | 2, 3 | - | GDB, BD, GRC |
| [3] | LFC and AVR | SA, ZN | PID | Hydro and Non-reheat thermal | 2016 | 4 | 2 | - | GDB |
| [4] | LFC and AVR | NN-FTF | Hybrid NN and FTF | - | 2016 | 1 | 1 | - | - |
| [5] | LFC and AVR | ZN, FLC | PID, Fuzzy | - | 2018 | 1 | 1 | - | - |
| [6] | LFC and AVR | LSA | PIDF, PIDuF | Reheat thermal, Wind, and Diesel | 2018 | 4 | 2 | IPFC, SMES | GDB, GRC |
| [7] | LFC and AVR | MFO | FOPID | Hydro and Non-reheat thermal | 2019 | 4 | 2 | - | GDB, BD |
| [8] | LFC and AVR | FA | PID | Hydro and Non-reheat thermal | 2019 | 4 | 2 | - | - |
| [9] | LFC and AVR | IPSO | CPSS | Gas, Reheat thermal, and Hydro | 2020 | 1 | 1 | - | GDB, GRC |
| [10] | LFC and AVR | DE-AEFA | PID | Wind , Hydro, Thermal, Gas, Solar, and Diesel | 2020 | 6 | 2 | HVDC link | GRC |
| [11] | LFC and AVR | DE-AEFA | PID | Gas, Diesel, Hydro, Solar photovoltaic, Reheat thermal, and Wind | 2020 | 6 | 2 | IPFC, RFBs | GRC |
| [12] | LFC and AVR | SCA | PIDF, PI | Reheat thermal and Non-reheat thermal | 2020 | 2 | 2 | UPFC, RFBs | - |
| [13] | LFC and AVR | NLTA | PID | - | 2021 | 2 | 2 | - | - |
| [14] | LFC and AVR | GWO | PIDD | Reheat thermal, Hydro, and Nuclear | 2021 | 6 | 2 | SMES, UPFC | GRC, GDB |
| [15] | LFC and AVR | FA | PID | Reheat thermal and Hydro | 2021 | 4 | 2 | - | TD, GRC, GDB |
| [16] | LFC and AVR | hFPAPFA | PIDA | Thermal | 2021 | 1 | 1 | - | - |
| [17] | LFC and AVR | HHO | TIDF | Reheat thermal and Combined cycle gas turbine (CCGT) | 2021 | 6 | 3 | - | GDB, GRC, BD |
| [18] | LFC and AVR | 2nd order error-driven control law | ADRC | Solar, Geothermal, Wind, and EVs | 2022 | 6 | 3 | - | - |
| [19] | LFC and AVR | HHO | 2DOF I-TDF | Reheat thermal, Wind, Solar thermal, and Dish-stirling, | 2022 | 6 | 3 | - | GDB, GRC |
| [20] | LFC and AVR | AFA | CFPD-TID | Hydro, Thermal, and Geothermal | 2022 | 6 | 3 | RFBs, HVDC link | GRC, DB |
| [21] | LFC and AVR | AFA | CFOTDN-FOPDN | Hydro, Dish-stirling, Solar thermal, and Reheat thermal | 2022 | 4 | 2 | - | GDB, CTD, GRC |
| [22] | LFC and AVR | AFA | CPDN-FOPIDN | Reheat thermal, Hydro, Gas, and Geothermal | 2022 | 6 | 3 | FESS, CES, RFBs, SMES HVDC link | GRC, GDB |
| [23] | LFC and AVR | DPO | PIDA | Three Bioenergy technologies and two Solar energy sources | 2022 | 10 | 2 | - | - |
| [24] | LFC and AVR | HAEFA | Fuzzy PID | Reheat thermal, Hydro, and Gas | 2022 | 6 | 2 | UCs, SMES, RFBs | - |
| Proposed Method | LFC and AVR | GBO | PID | Thermal, Gas, Hydro, Wind, and Solar | 2022 | 20 | 4 | - | - |
| Acronym | Definition | Acronym | Definition |
|---|---|---|---|
| Trh | Transient droop time constant | GBO | Gradient-Based Optimizer |
| SLP | Step load perturbation | K1, K2, K3, K4, | Cross-coupling coefficients for AVR and LFC loops |
| PID | Proportional integral derivative | TCR | Combustion reaction time delay |
| Vt | Terminal voltage | Y | Speed governor lag time constant |
| I-PD | Integral–proportional derivative | ∆f | Frequency deviation |
| Rt, Rh, Rg, Rw | Speed regulation of thermal reheat, hydro, gas, and wind power plants | T12, T13, T14, T21, T23, T24, T31, T32, T34, T41, T42, T43 | Tie-line synchronizing time constants |
| TID | Tilt integral derivative | Kp | Gain of power system |
| I-P | Integral–proportional | TCD | Compressor discharge volume time constant |
| Tp | Time constant of power system | X | Speed governor lead time constant |
| LFC | Load frequency control | Tw | Water time constant |
| ∆Ptie | Tie-line power deviation | Kw1, Kw2 | Wind plant gain constants |
| AVR | Automatic voltage regulator | Tw1, Tw2 | Wind turbine time constants |
| ∆PD | Load deviation | TPV | Solar PV time constant |
| IPS | Interconnected power system | KPV | Solar PV gain constant |
| Ttr | Time constant of thermal turbine | a,b,c | Valve positional time constant |
| B | Area biasing factor | Th | Main servo time constant |
| Tre | Time constant of reheat steam turbine | Ka | Gain of amplifier |
| Ta | Time constant of amplifier | Ke | Gain of exciter |
| Kg | Gain of generator field | Te | Time constant of exciter |
| Tgr | Time constant of speed governor | Ts | Time constant of voltage sensor |
| Kre | Gain of reheat steam turbine | Tg | Time constant of generator field |
| Ks | Gain of voltage sensor | Tf | Fuel time constant |
| D | Frequency sensitive load coefficient | VS | Sensor voltage |
| PS | Synchronizing power coefficient | Ve | Error voltage |
| H | Inertia constant | GDB | Governor dead band |
| Trs | Speed governor rest time | FTF | Fast traversal filter |
| GRC | Generation rate constraints | MFO | Moth Flame Optimization |
| SMES | Superconducting magnetic energy storage | DE | Differential Evolution |
| NN | Neural network | GWO | Grey Wolf Optimizer |
| FO | Fractional order | PFA | Pathfinder Algorithm |
| AOA | Archimedes Optimization Algorithm | NLTA | Nonlinear Threshold Accepting Algorithm |
| FA | Firefly Algorithm | CFPD | Cascaded Fuzzy PD |
| IPSO | Improved Particle Swarm Optimization | MPSO | Modified Particle Swarm Optimization |
| AEFA | Artificial Electric Field Algorithm | AFA | Artificial Flora Algorithm |
| ADRC | Active disturbance rejection control | UCs | Ultra capacitors |
| UPFC | Unified Power Flow Controller | CPSS | Conventional power system stabilizer |
| SCA | Sine Cosine Algorithm | LPBO | Learner Performance-Based Behavior Optimization |
| FPA | Flower Pollinated Algorithm | IPFC | Interline Power Flow Controller |
| HHO | Harris Hawks Optimization | DO | Dandelion Optimizer |
| CTD | Communication time delay | 2DOF | Two degrees of freedom |
| DPO | Doctor and Patient Optimization Technique | ITSE | Integral of time multiplied by squared value of error |
| Area | GBO−I-P | GBO−TID | GBO−I−PD | GBO−PID | ||||
|---|---|---|---|---|---|---|---|---|
| Controller Parameter | Value | Controller Parameter | Value | Controller Parameter | Value | Controller Parameter | Value | |
| Area−1 | Kp1 | 0.17 | Kt1 | 0.76 | Ki1 | 0.0001 | Kp1 | 1.43 |
| Ki1 | 2.42 | Ki1 | 1.29 | Kp1 | 1.59 | Ki1 | 1.27 | |
| - | - | Kd1 | 0.20 | Kd1 | 1.97 | Kd1 | 1.93 | |
| Kp2 | 1.37 | Kt2 | 0.97 | Ki2 | 1.09 | Kp2 | 1.08 | |
| Ki2 | 1.38 | Ki2 | 0.29 | Kp2 | 1.15 | Ki2 | 1.11 | |
| - | - | Kd2 | 1.18 | Kd2 | 0.15 | Kd2 | 0.67 | |
| Area−2 | Kp3 | 1.43 | Kt3 | 1.54 | Ki3 | 0.74 | Kp3 | 1.11 |
| Ki3 | 0.82 | Ki3 | 1.27 | Kp3 | 0.25 | Ki3 | 1 | |
| - | - | Kd3 | 0.30 | Kd3 | 0.54 | Kd3 | 1.24 | |
| Kp4 | 0.92 | Kt4 | 0.44 | Ki4 | 0.35 | Kp4 | 1.37 | |
| Ki4 | 0.83 | Ki4 | 0.18 | Kp4 | 0.41 | Ki4 | 1.20 | |
| - | - | Kd4 | 0.20 | Kd4 | 0.14 | Kd4 | 0.96 | |
| Area−3 | Kp5 | 1.15 | Kt5 | 1.82 | Ki5 | 0.01 | Kp5 | 1.74 |
| Ki5 | 1.67 | Ki5 | 0.42 | Kp5 | 0.65 | Ki5 | 1.76 | |
| - | - | Kd5 | 1.73 | Kd5 | 1.28 | Kd5 | 0.99 | |
| Kp6 | 1.11 | Kt6 | 0.87 | Ki6 | 1.06 | Kp6 | 1.33 | |
| Ki6 | 1.09 | Ki6 | 0.31 | Kp6 | 0.85 | Ki6 | 1.27 | |
| - | - | Kt6 | 0.24 | Kd6 | 0.047 | Kd6 | 1.13 | |
| Area−4 | Kp7 | 0.12 | Kt7 | 1.78 | Ki7 | 0.99 | Kp7 | 0.98 |
| Ki7 | 2.78 | Ki7 | 0.28 | Kp7 | 2 | Ki7 | 1.94 | |
| - | - | Kd7 | 0.62 | Kd7 | 0.14 | Kd7 | 1.39 | |
| Kp8 | 1.10 | Kt8 | 1.30 | Ki8 | 1.15 | Kp8 | 1.24 | |
| Ki8 | 1.13 | Ki8 | 0.069 | Kp8 | 1.28 | Ki8 | 0.61 | |
| - | - | Kd8 | 1.50 | Kd8 | 0.58 | Kd8 | 1.26 | |
| ITSE | 2.18 | ITSE | 2.62 | ITSE | 3.43 | ITSE | 0.71 | |
| Control Strategy | Area-1 | Area-2 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| GBO-PID | 5.37 | 0.23 | −0.58 | 0 | 5.38 | 0.23 | −0.54 | 0 |
| GBO-I-PD | 16.3 | 0 | −0.049 | 0 | 19.54 | 0.009 | −0.068 | 0 |
| GBO-TID | 9.66 | 0.022 | −0.13 | 0 | 9.51 | 0.018 | −0.14 | 0 |
| GBO-I-P | 16.10 | 0.0086 | −0.07 | 0 | 16.49 | 0.036 | −0.12 | 0 |
| Control Strategy | Area-3 | Area-4 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| GBO-PID | 5.38 | 0.22 | −0.52 | 0 | 5.98 | 0.26 | −0.49 | 0 |
| GBO-I-PD | 11.0 | 0 | −0.08 | 0 | 17.08 | 0.0039 | −0.046 | 0 |
| GBO-TID | 9.62 | 0.011 | −0.15 | 0 | 9.68 | 0.015 | −0.13 | 0 |
| GBO-I-P | 17.66 | 0.009 | −0.087 | 0 | 16.95 | 0.013 | −0.057 | 0 |
| Control Strategy | Area-1 | Area-2 | ||||
| Settling Time | % Overshoot | % s-s Error | Settling Time | % Overshoot | % s-s Error | |
| GBO-PID | 3.96 | 7.52 | 0 | 4.09 | 5.45 | 0 |
| GBO-I-PD | 3.72 | 0.48 | 0 | 6.75 | 6.66 | 0 |
| GBO-TID | 6.60 | 21.91 | 0 | 7.68 | 19.71 | 1.8 |
| GBO-I-P | 7.52 | 7.43 | 0 | 5.68 | 11.9 | 0 |
| Control Strategy | Area-3 | Area-4 | ||||
| Settling Time | % Overshoot | % s-s | Settling Time | % Overshoot | % s-s | |
| Error | Error | |||||
| GBO-PID | 4.36 | 9.0 | 0 | 2.92 | 10.13 | 0 |
| GBO-I-PD | 5.72 | 18.04 | 0 | 5.27 | 5.90 | 0 |
| GBO-TID | 5.24 | 33.18 | 0 | 6.72 | 11.90 | 0 |
| GBO-I-P | 7.01 | 5.52 | 0 | 5.92 | 4.36 | 0 |
| Control Strategy | Area-1 | Area-2 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| GBO-PID | 9.36 | 0.023 | −0.016 | 0 | 9.69 | 0.0025 | −0.0093 | 0 |
| GBO-I-PD | 16.65 | 0.052 | −0.0035 | 0.004 | 19.48 | 0.047 | −0.034 | 0 |
| GBO-TID | 11.18 | 0.012 | −0.0112 | 0 | 11.02 | 0.011 | −0.0053 | 0 |
| GBO-I-P | 19.50 | 0.019 | −0.023 | 0 | 16.12 | 0.039 | −0.040 | 0 |
| Control Strategy | Area-3 | Area-4 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| GBO-PID | 8.45 | 0.013 | −0.012 | 0 | 10.23 | 0.015 | −0.013 | 0 |
| GBO-I-PD | 18.71 | 0.0038 | −0.066 | 0.004 | 19.47 | 0.043 | −0.035 | 0 |
| GBO-TID | 9.7 | 0.015 | −0.017 | 0 | 9.63 | 0.0098 | −0.0081 | 0 |
| GBO-I-P | 19.17 | 0.022 | −0.015 | 0 | 18.23 | 0.031 | −0.007 | 0 |
| Case | Area-1 | Area-2 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 5.23 | 0.21 | −0.57 | 0 | 5.26 | 0.21 | −0.53 | 0 |
| −25% of Rt, Rh, Rg, Rw | 6.38 | 0.26 | −0.55 | 0 | 6.39 | 0.24 | −0.51 | 0 |
| Nominal Values | 5.37 | 0.23 | −0.58 | 0 | 5.38 | 0.23 | −0.54 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 5.44 | 0.24 | −0.58 | 0 | 6.05 | 0.25 | −0.55 | 0 |
| +25% of Rt, Rh, Rg, Rw | 4.89 | 0.21 | −0.60 | 0 | 4.90 | 0.22 | −0.56 | 0 |
| Case | Area-3 | Area-4 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 5.27 | 0.21 | −0.51 | 0 | 5.28 | 0.24 | −0.49 | 0 |
| −25% of Rt, Rh, Rg, Rw | 6.39 | 0.21 | −0.50 | 0 | 6.38 | 0.25 | −0.47 | 0 |
| Nominal Values | 5.38 | 0.22 | −0.52 | 0 | 5.98 | 0.26 | −0.49 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 6.07 | 0.23 | −0.52 | 0 | 6.17 | 0.27 | −0.50 | 0 |
| +25% of Rt, Rh, Rg, Rw | 4.90 | 0.22 | −0.53 | 0 | 4.92 | 0.25 | −0.51 | 0 |
| Case | Area-1 | Area-2 | ||||
| Settling Time | % Overshoot | % s-s Error | Settling Time | % Overshoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 3.95 | 7.46 | 0 | 4.08 | 5.44 | 0 |
| −25% of Rt, Rh, Rg, Rw | 3.96 | 7.57 | 0 | 4.07 | 5.43 | 0 |
| Nominal Values | 3.96 | 7.52 | 0 | 4.09 | 5.45 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 3.97 | 7.55 | 0 | 4.1 | 5.46 | 0 |
| +25% of Rt, Rh, Rg, Rw | 3.92 | 7.40 | 0 | 4.07 | 5.46 | 0 |
| Case | Area-3 | Area-4 | ||||
| Settling Time | % Overshoot | % s-s Error | Settling Time | % Overshoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 4.36 | 9.0 | 0 | 2.91 | 10.13 | 0 |
| −25% of Rt, Rh, Rg, Rw | 4.36 | 9.0 | 0 | 2.95 | 10.13 | 0 |
| Nominal Values | 4.36 | 9.0 | 0 | 2.92 | 10.13 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 4.36 | 9.0 | 0 | 2.93 | 10.14 | 0 |
| +25% of Rt, Rh, Rg, Rw | 4.36 | 9.0 | 0 | 2.88 | 10.14 | 0 |
| Case | Area-1 | Area-2 | ||||||
| Settling Time | % Overshoot | % Undershoot | % s-s Error | Settling Time | % Overshoot | % Undershoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 9.39 | 0.022 | −0.015 | 0 | 9.71 | 0.0022 | −0.0091 | 0 |
| −25% of Rt, Rh, Rg, Rw | 9.26 | 0.023 | −0.017 | 0 | 9.85 | 0.0029 | −0.0089 | 0 |
| Nominal Values | 9.36 | 0.023 | −0.016 | 0 | 9.69 | 0.0025 | −0.0093 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 9.35 | 0.023 | −0.017 | 0 | 9.67 | 0.0026 | −0.0094 | 0 |
| +25% of Rt, Rh, Rg, Rw | 9.28 | 0.023 | −0.016 | 0 | 9.61 | 0.0021 | −0.0096 | 0 |
| Case | Area-3 | Area-4 | ||||||
| Settling Time | % Overshoot | Undershoot | % s-s Error | Settling Time | % Overshoot | Undershoot | % s-s Error | |
| −25% of Ttr1, Ttr2, Ttr3, Ttr4 | 8.48 | 0.012 | −0.011 | 0 | 10.26 | 0.014 | −0.012 | 0 |
| −25% of Rt, Rh, Rg, Rw | 8.13 | 0.013 | −0.011 | 0 | 10.32 | 0.015 | −0.012 | 0 |
| Nominal Values | 8.45 | 0.013 | −0.012 | 0 | 10.23 | 0.015 | −0.013 | 0 |
| +25% of Ttr1, Ttr2, Ttr3, Ttr4 | 8.47 | 0.013 | −0.012 | 0 | 10.21 | 0.016 | −0.013 | 0 |
| +25% of Rt, Rh, Rg, Rw | 7.74 | 0.012 | −0.012 | 0 | 10.18 | 0.015 | −0.0013 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, T.; Malik, S.A.; Daraz, A.; Adeel, M.; Aslam, S.; Herodotou, H. Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer. Energies 2023, 16, 2086. https://doi.org/10.3390/en16052086
Ali T, Malik SA, Daraz A, Adeel M, Aslam S, Herodotou H. Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer. Energies. 2023; 16(5):2086. https://doi.org/10.3390/en16052086
Chicago/Turabian StyleAli, Tayyab, Suheel Abdullah Malik, Amil Daraz, Muhammad Adeel, Sheraz Aslam, and Herodotos Herodotou. 2023. "Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer" Energies 16, no. 5: 2086. https://doi.org/10.3390/en16052086
APA StyleAli, T., Malik, S. A., Daraz, A., Adeel, M., Aslam, S., & Herodotou, H. (2023). Load Frequency Control and Automatic Voltage Regulation in Four-Area Interconnected Power Systems Using a Gradient-Based Optimizer. Energies, 16(5), 2086. https://doi.org/10.3390/en16052086