
Electric Vehicle Charging Hub Power Forecasting: A Statistical and Machine Learning Based Approach

 ,
,  ,
,  ,
,  ,
, 

Abstract
1. Introduction
2. Analysis and Modeling of Parameters Influencing EV Charging
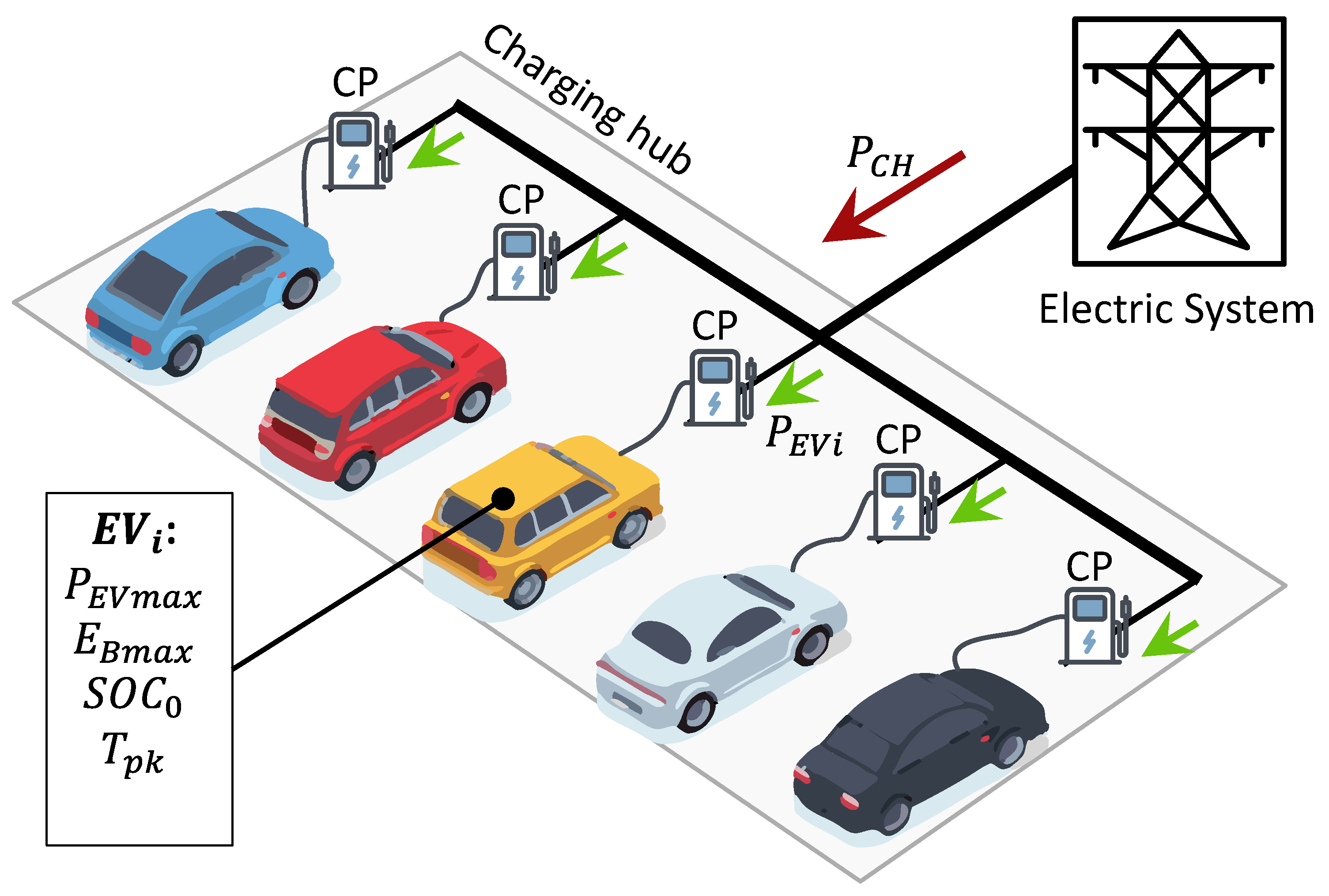
- The maximum power made available by the CP, named (kW). The CH is considered composed of CP of the same kind.
- The EV characteristics in terms of maximum power accepted by the battery and its maximum capacity .
- The EV users’ behavior in terms of arrival and departure times, parking duration (), and charging duration.
- The initial state of charge (), i.e., the SOC value at the arrival of the EV at the parking lot, that depends on the EV users’ behavior and consumption before the charging event.
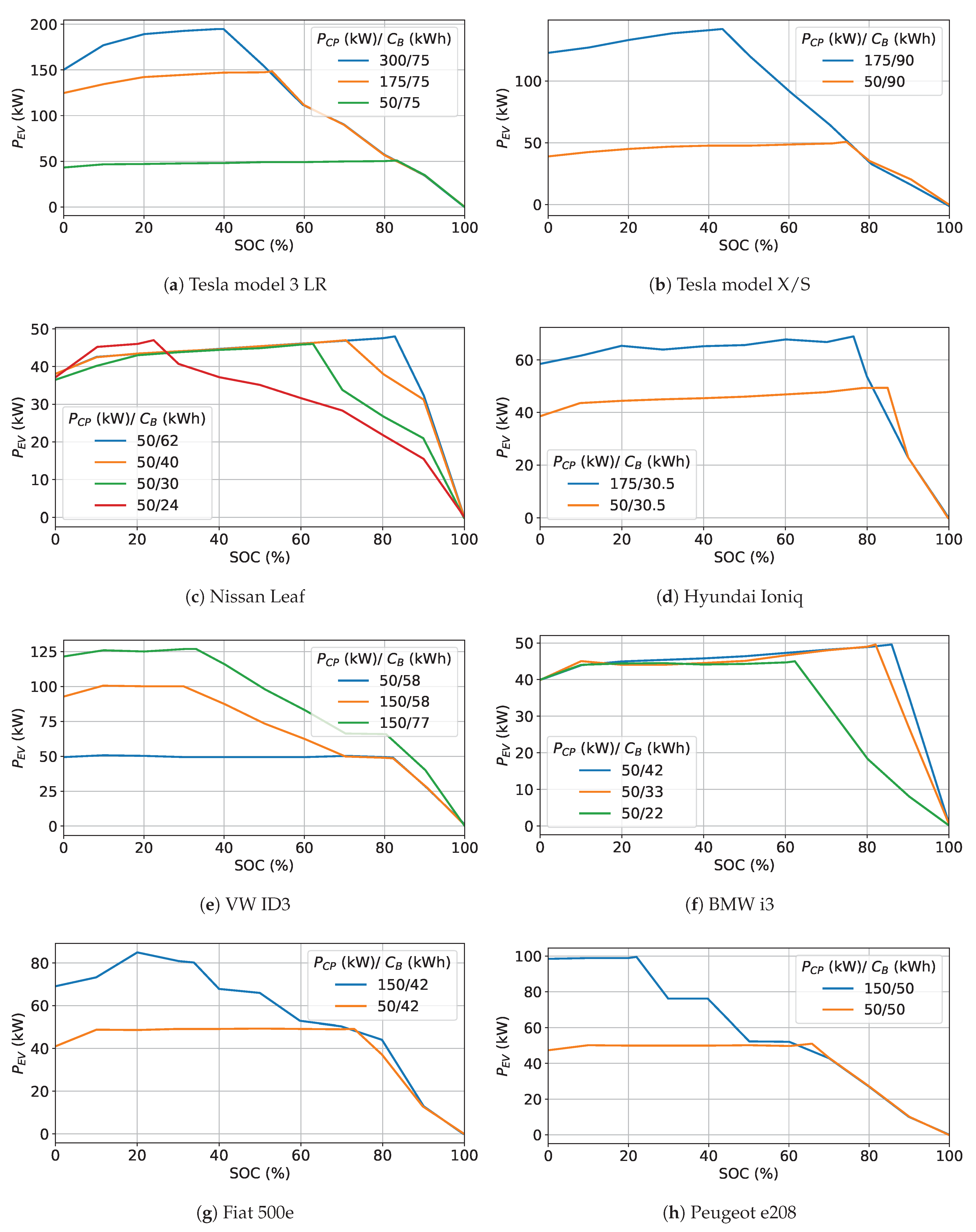
- The profile evolution of the power absorbed by the battery during the charging process in relation to charging station and EV models.
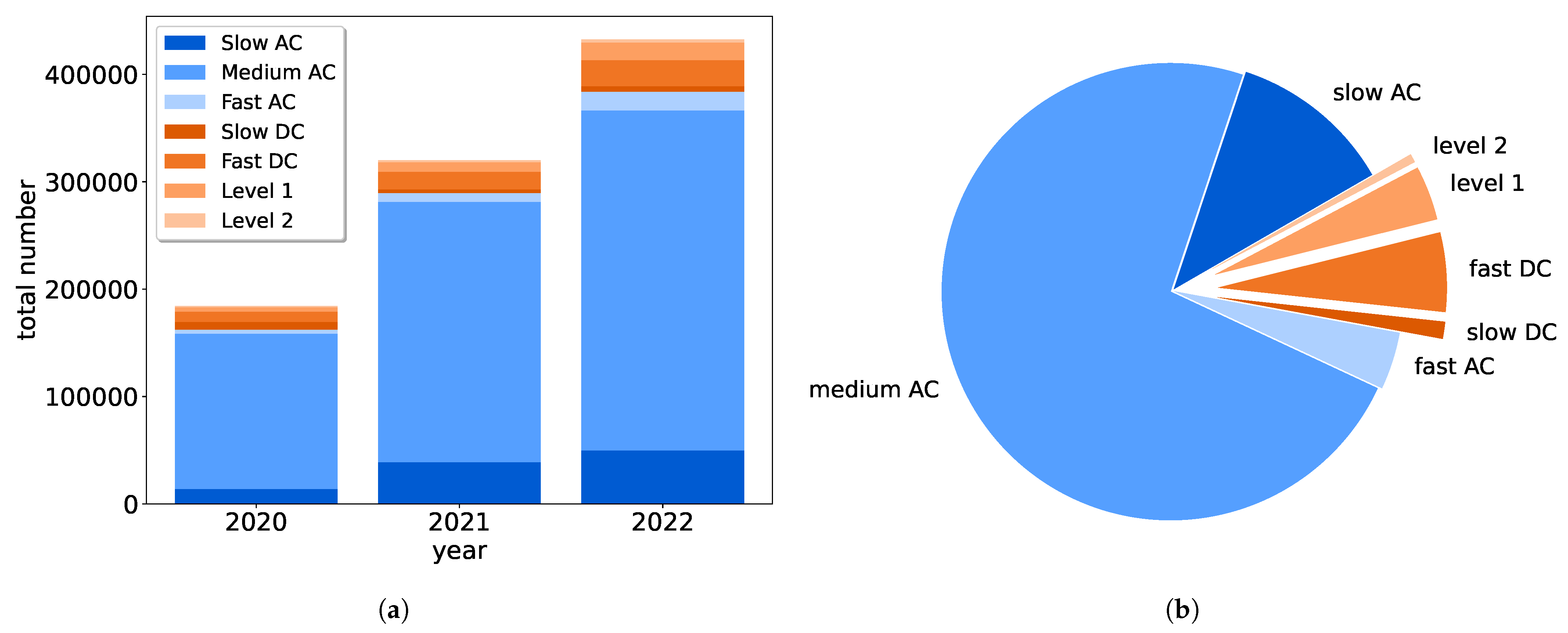
2.1. Charging Infrastructure and EV Model Characteristics
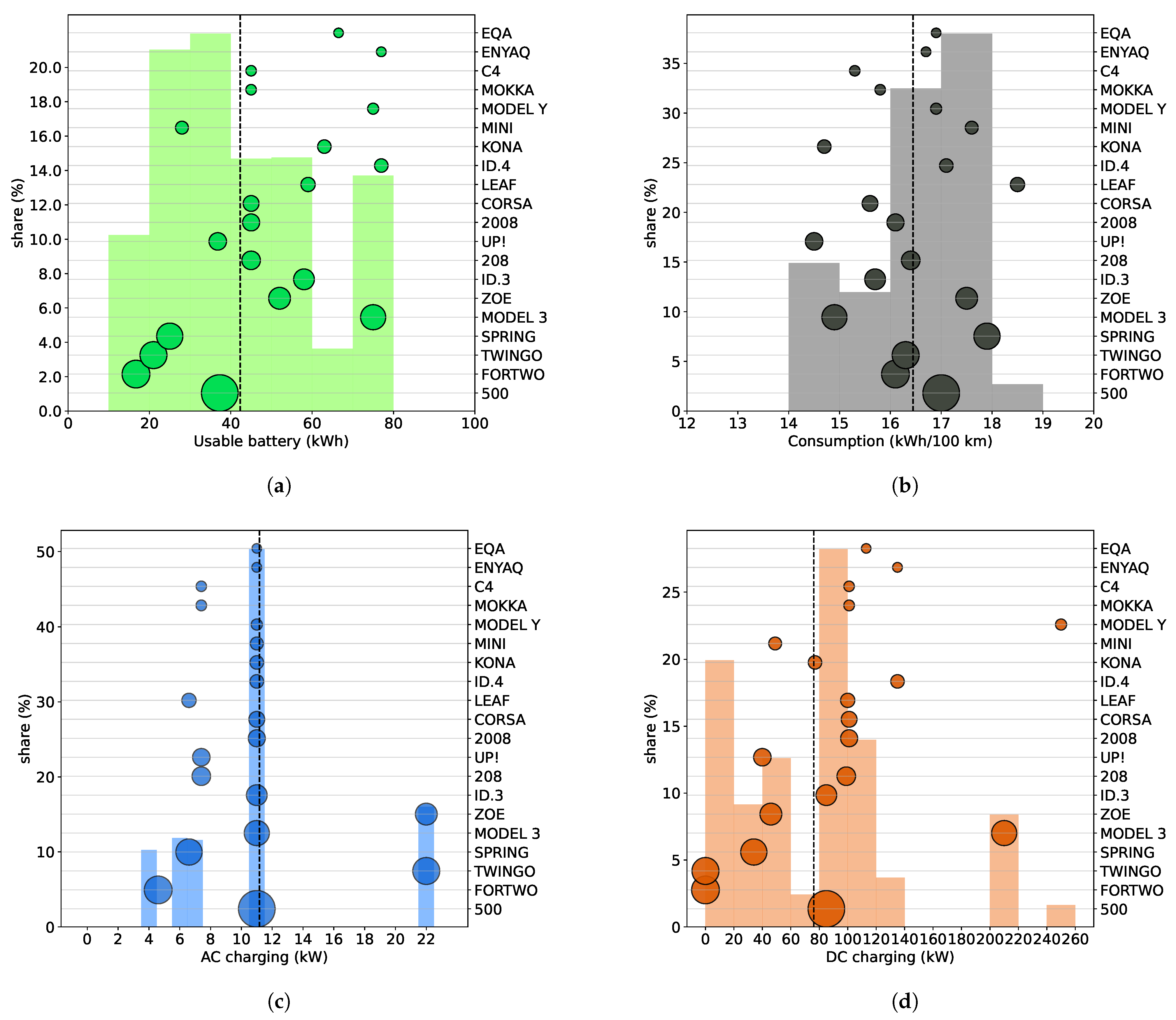
- The average usable battery capacity (Figure 3a) is with a standard deviation of . 53% of EVs (including the top 4 registered models) have a capacity of less than . Compared to the European scenario, the Italian fleet has only 13% of EVs belonging to the 70–80 kWh capacity range.
- The average specific consumption is per . As visible in Figure 3b, the distribution is fairly homogeneous among the fleet and owns a standard deviation of 1 kWh/100 km. Considering the average battery capacity, it is possible to calculate the average distance driven in the WLTP condition, which is about .
- The average AC charging power (Figure 3c) is equal to with a standard deviation of . This value is in line with the European scenario. About 50% of the vehicles have a maximum charging power of . 15% (represented by the Renault brand) can charge up to in AC. Finally, about 75% of the vehicle’s onboard chargers allow medium-speed AC charging, remaining 25% can only use slow AC levels. No vehicles enable Fast AC charging.
- The average DC charging power (Figure 3d) is with a standard deviation of . It is worth noting that about 20% of EVs can not charge via DC CP and 20% can only be charged via Slow DC level. About 50% of the fleet can be charged via Fast DC CP. The remaining 10% of EV is enabled to charge via Level 1—Ultra-fast chargers.
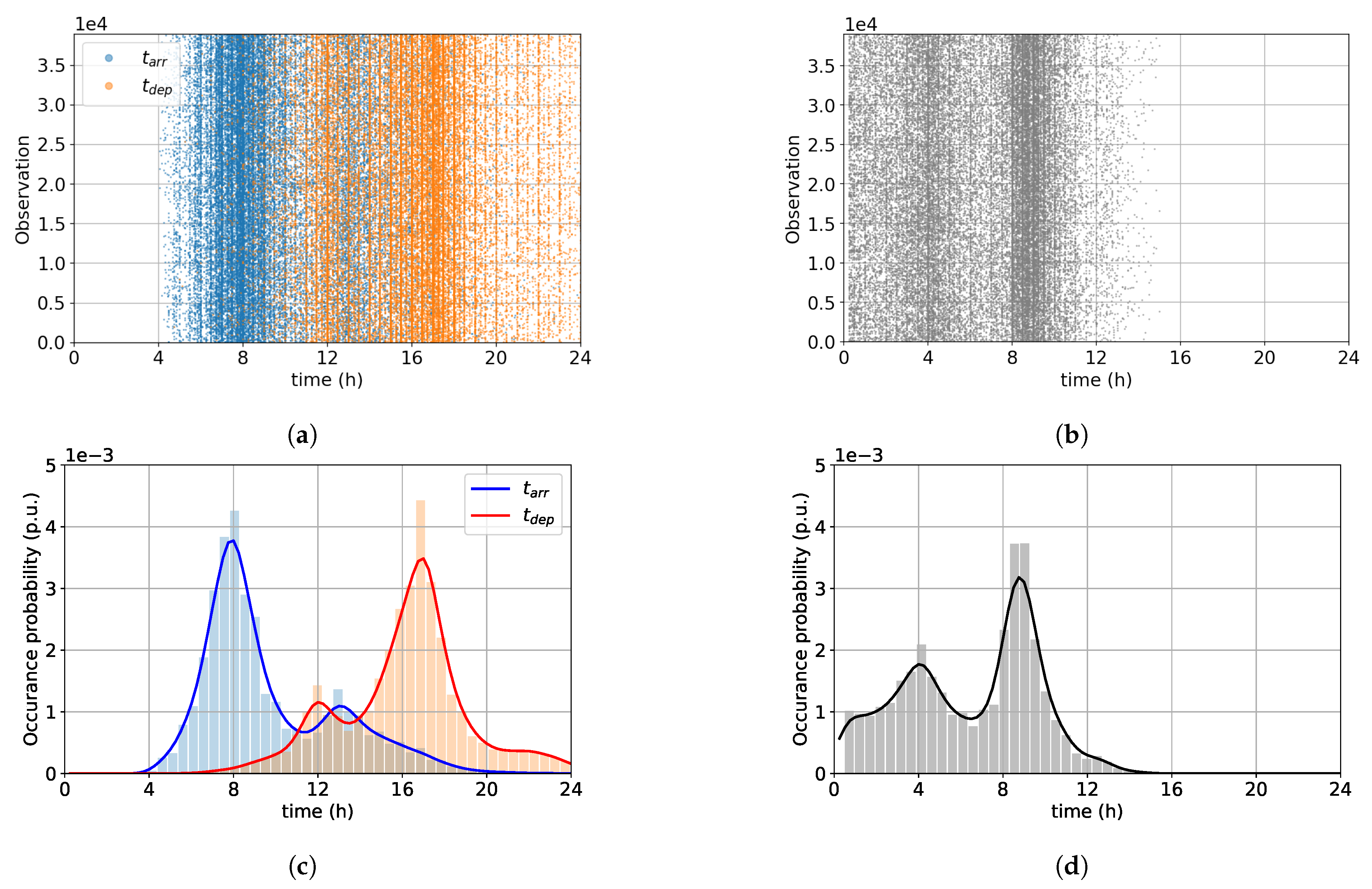
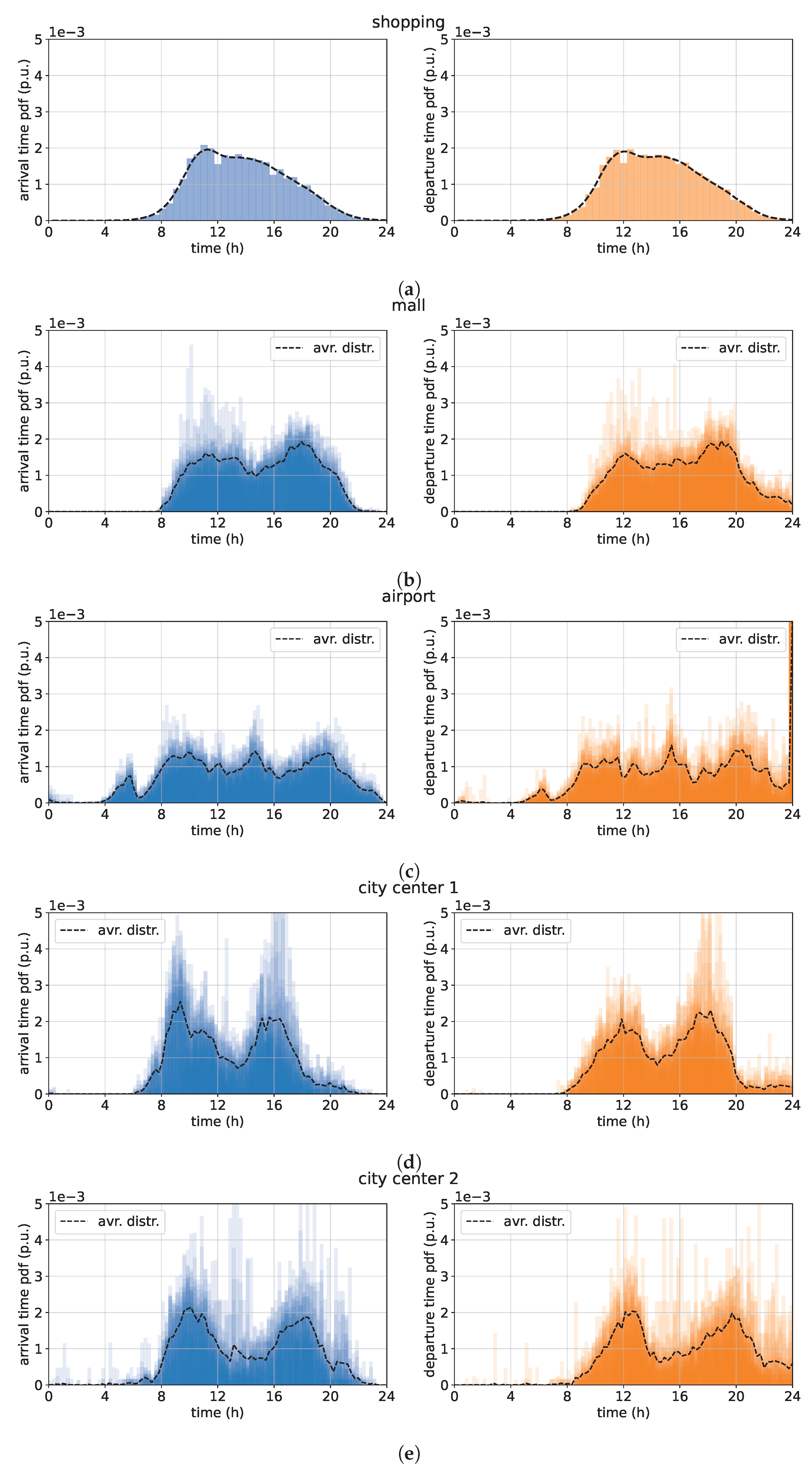
2.2. Statistical Patterns of Users Behavior
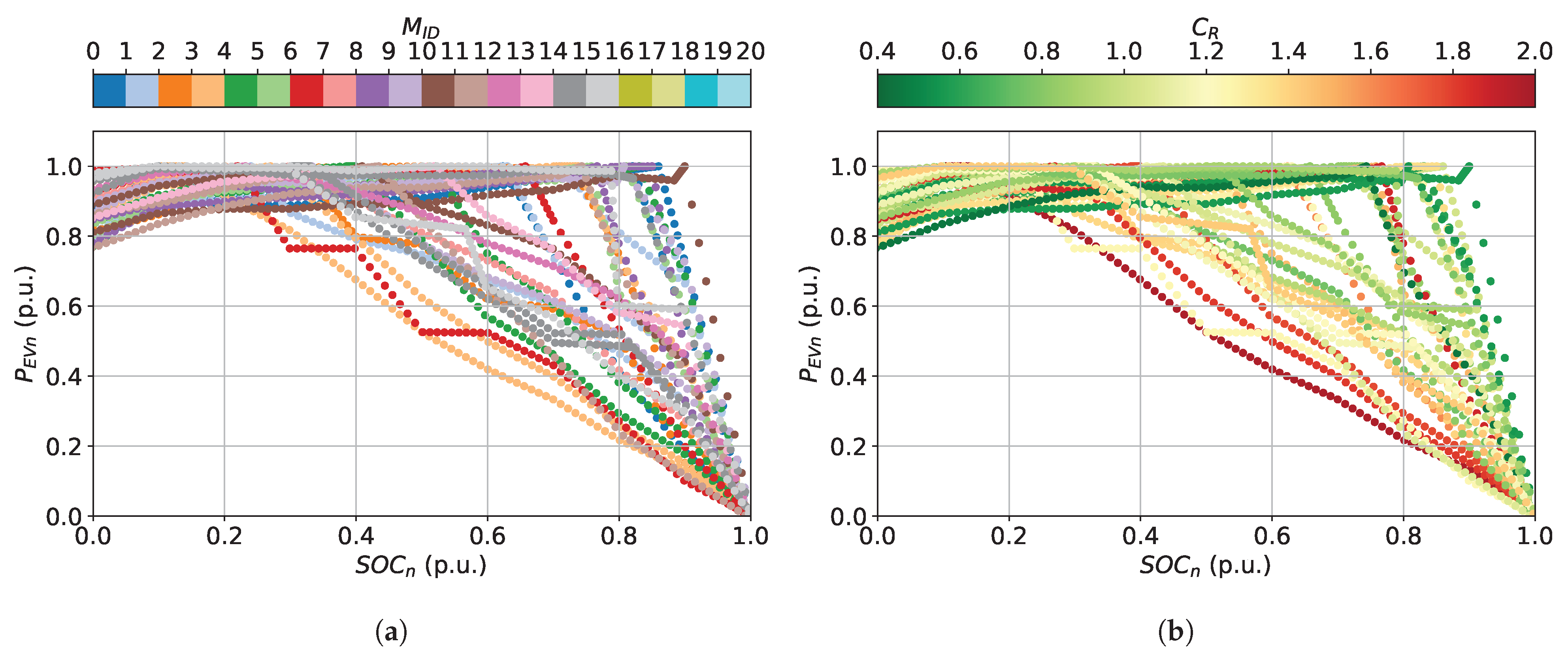
2.3. Pre-Connection SOC Modeling
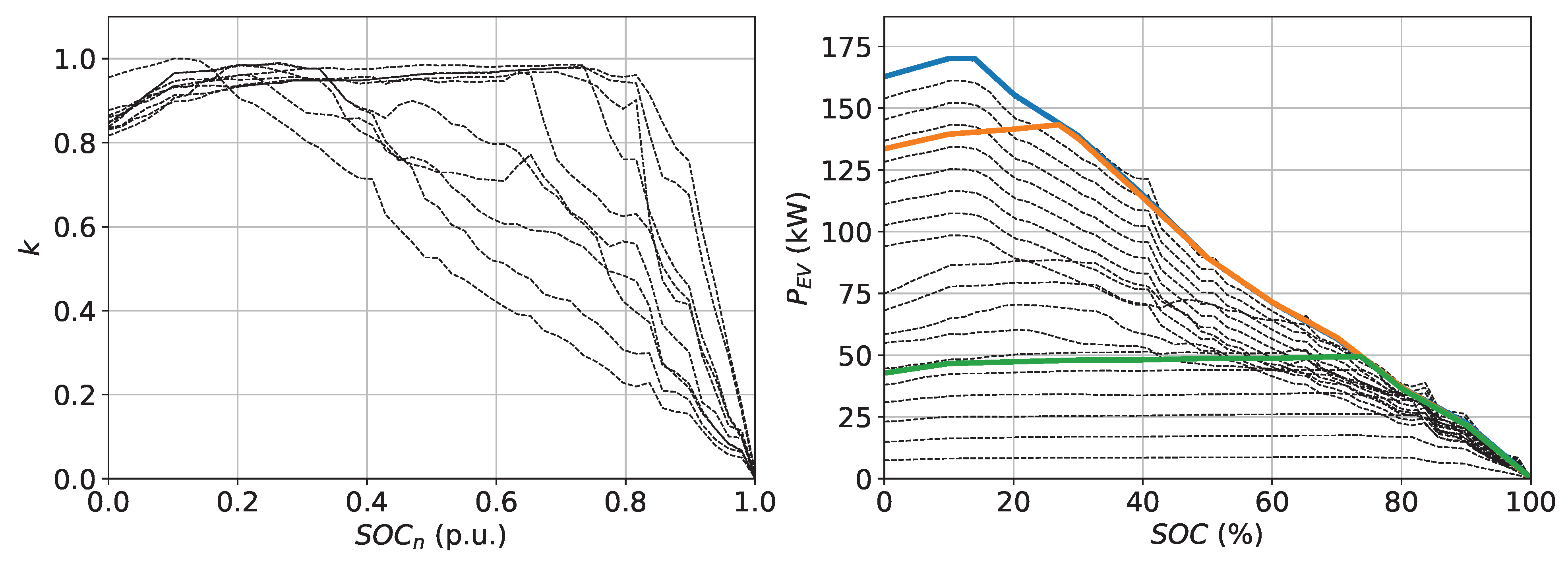
2.4. EV Battery Charging Behavioral Model Based on Machine Learning
2.4.1. Data Pre-Processing
2.4.2. Model Training
- A training dataset (typically larger than about 70% of the main data set) with which to train the model. It contains the training feature () and label () values;
- A test dataset (about 30% of the main dataset) with which to validate the trained model by generating predictions for the label and comparing them to the actual known label values. This enables to evaluate the model error and accuracy. The test dataset contains the test feature () and label () values.
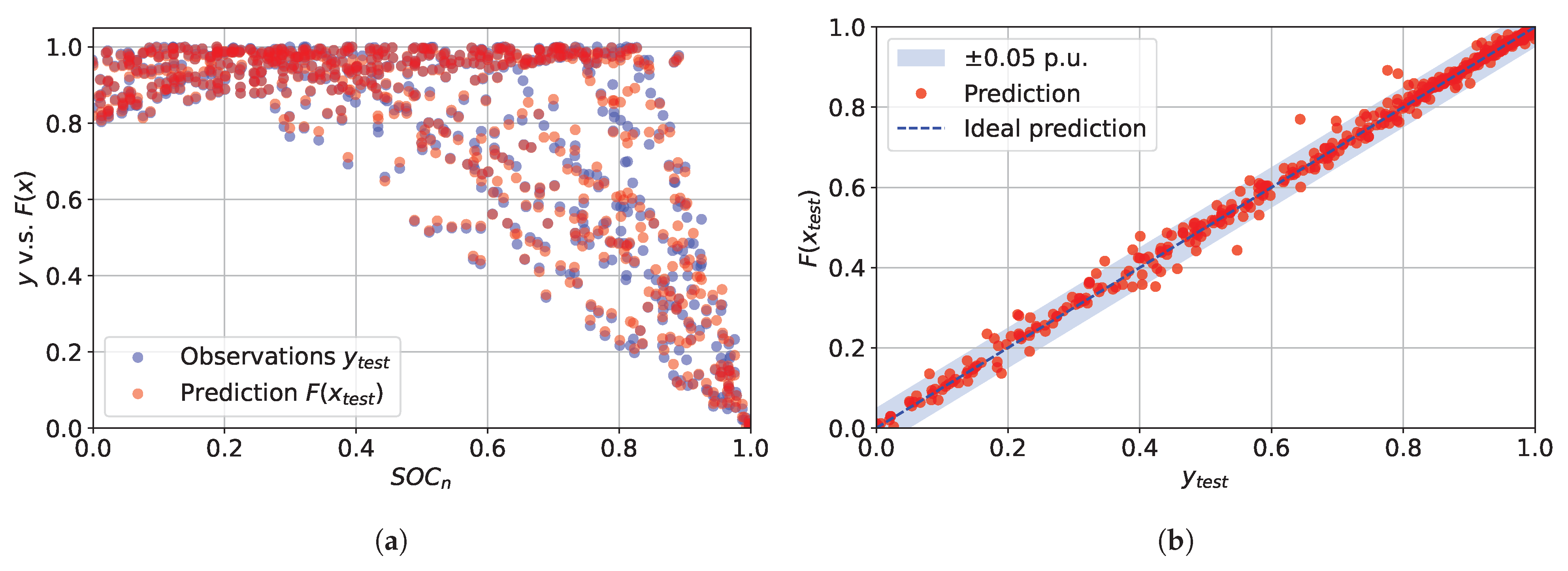
2.4.3. Model Validation
- Mean Square Error (MSE) that is the mean of the squared differences between predicted and actual values. The proposed GBR model obtains a value of MSE = 0.0003;
- Root Mean Square Error (RMSE) that is the square root of the MSE. This parameter yields an absolute metric in the same unit as the label (in this case, p.u.). The smaller the value, the better the model. The predictions overlap the observation with an RMSE = 0.0174;
- Coefficient of Determination (usually known as R-squared or R2). It is a relative metric that quantifies the fit of the model. In essence, this metric represents how much of the variance between predicted and actual label values the model is able to explain. A good trade-off to avoid over-fitting is R2 = 1 [43]. The proposed method score is R2 = 0.9959.
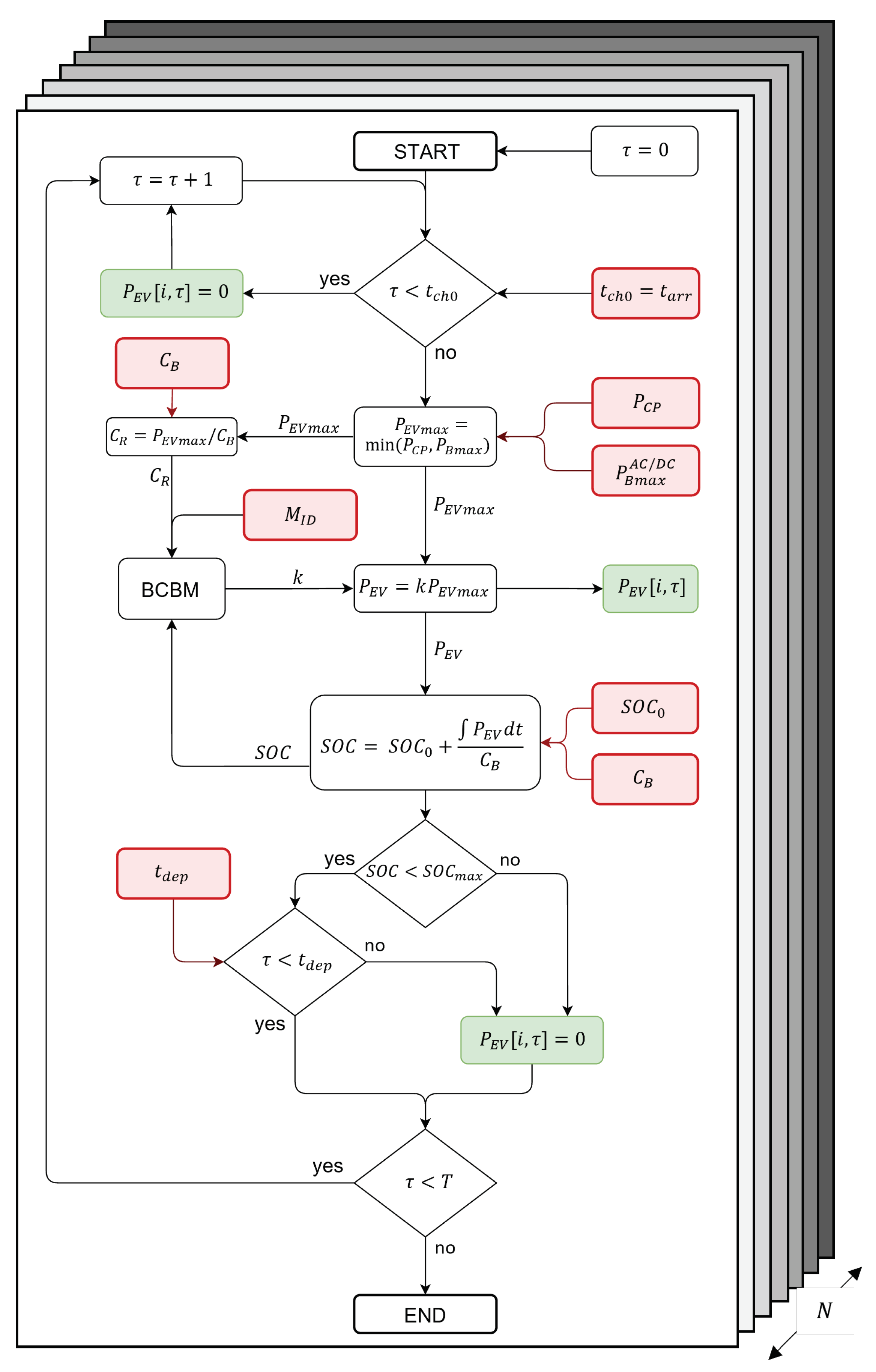
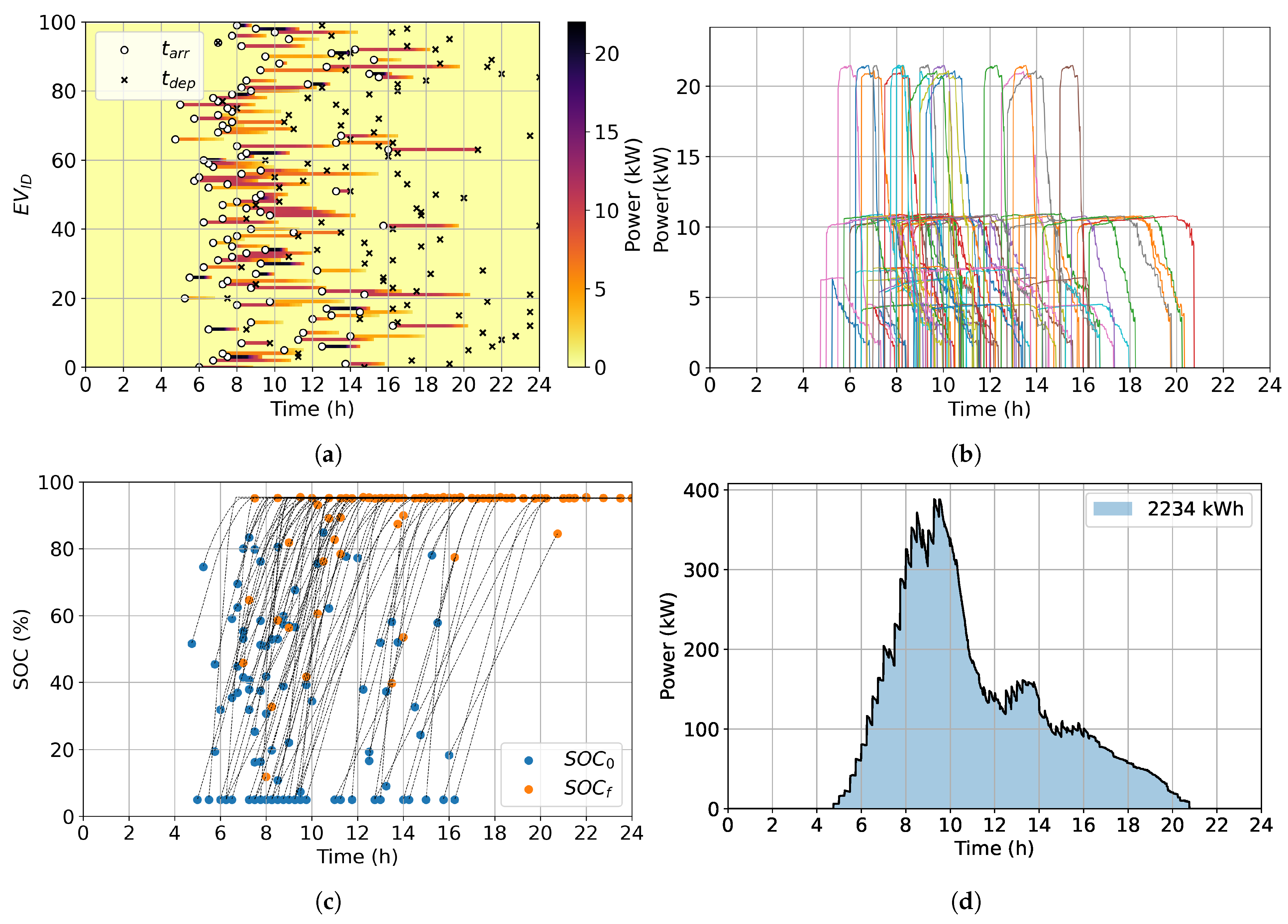
3. EV Charging Forecasting Algorithm
- The vehicle is plugged and the SOC reaches the maximum value. Hence, the charging stops and ;
- The vehicle is unplugged because the users leaves the parking lot even if the charging is incomplete. Hence, .
4. Results on Different Scenarios
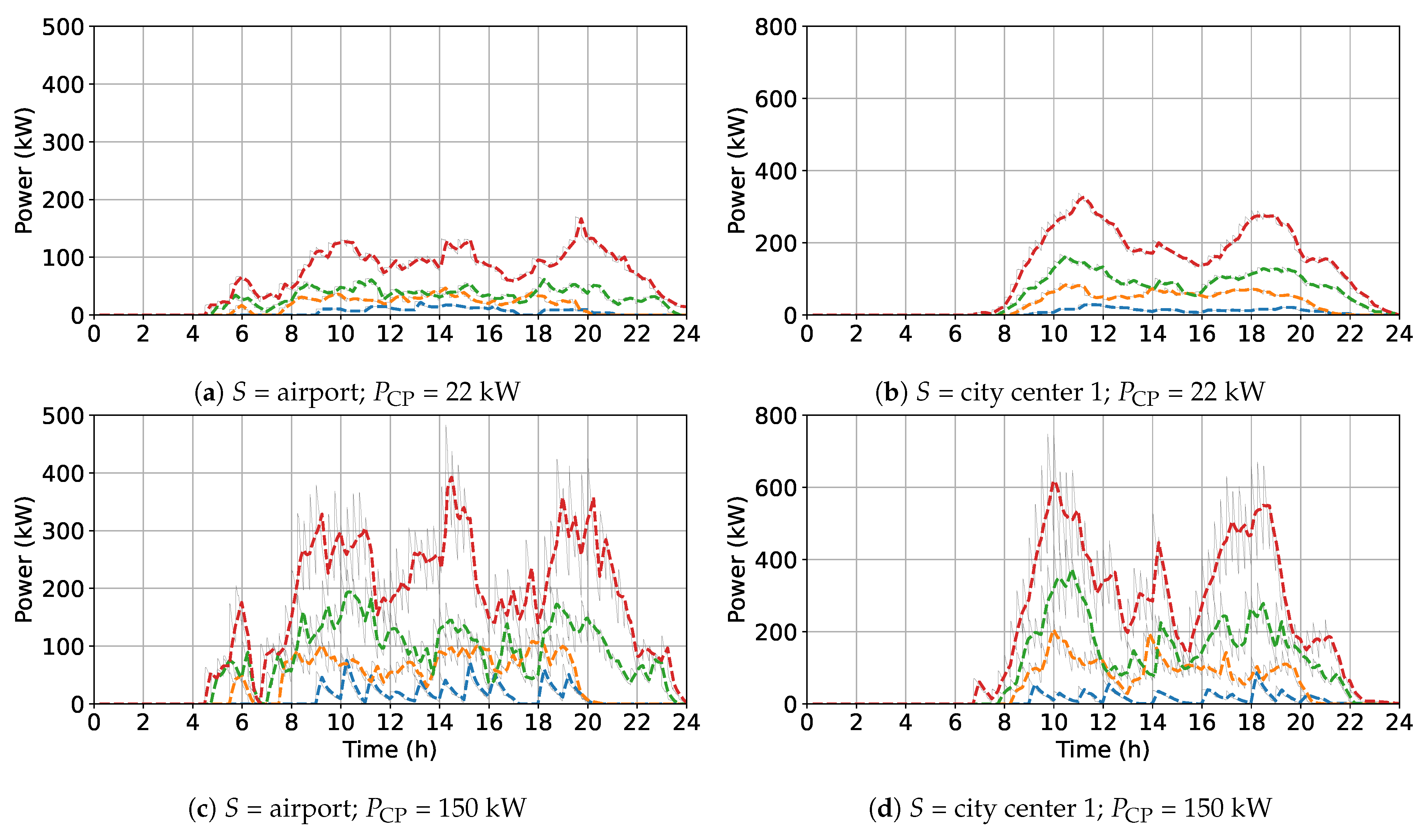
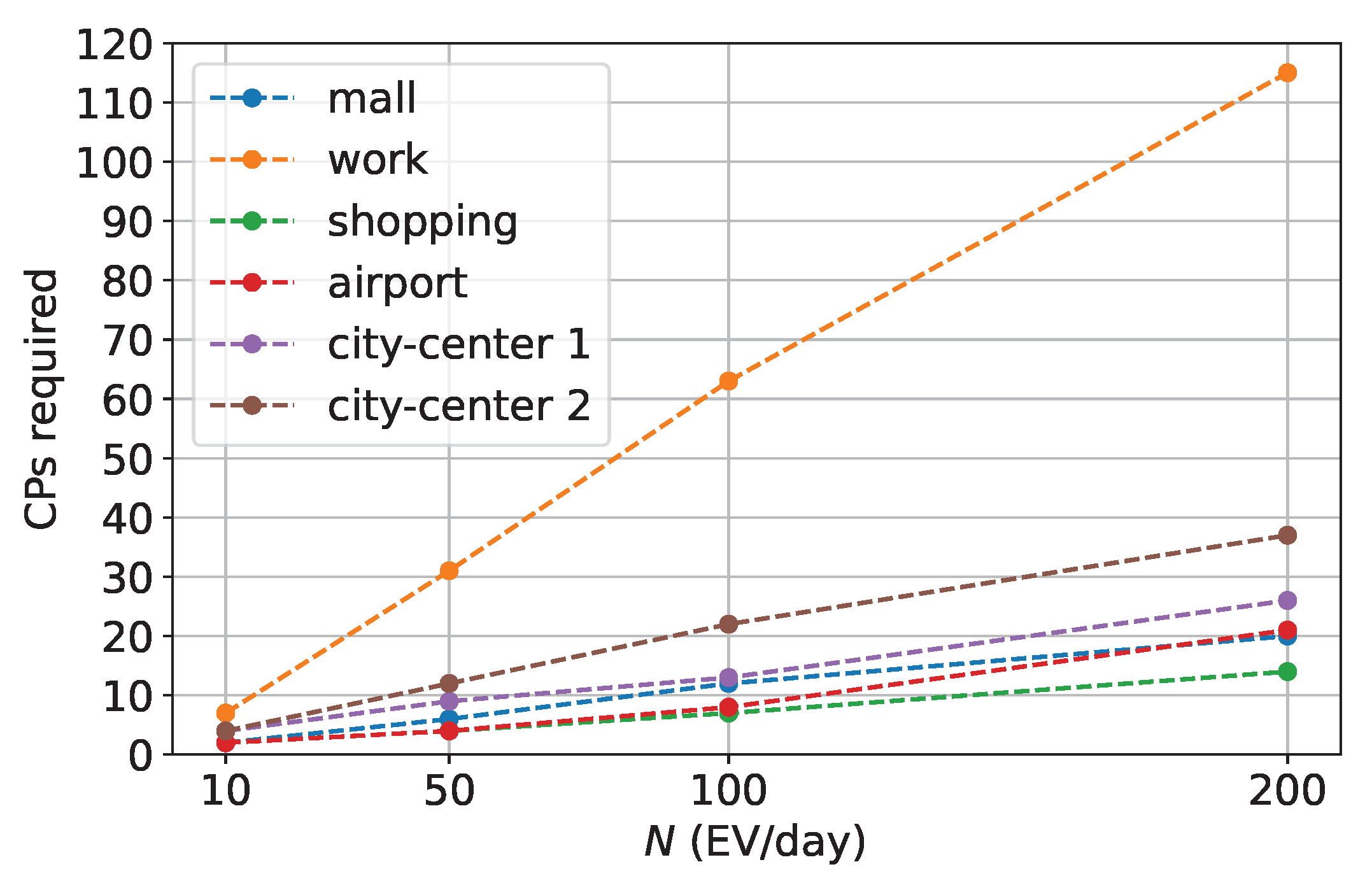
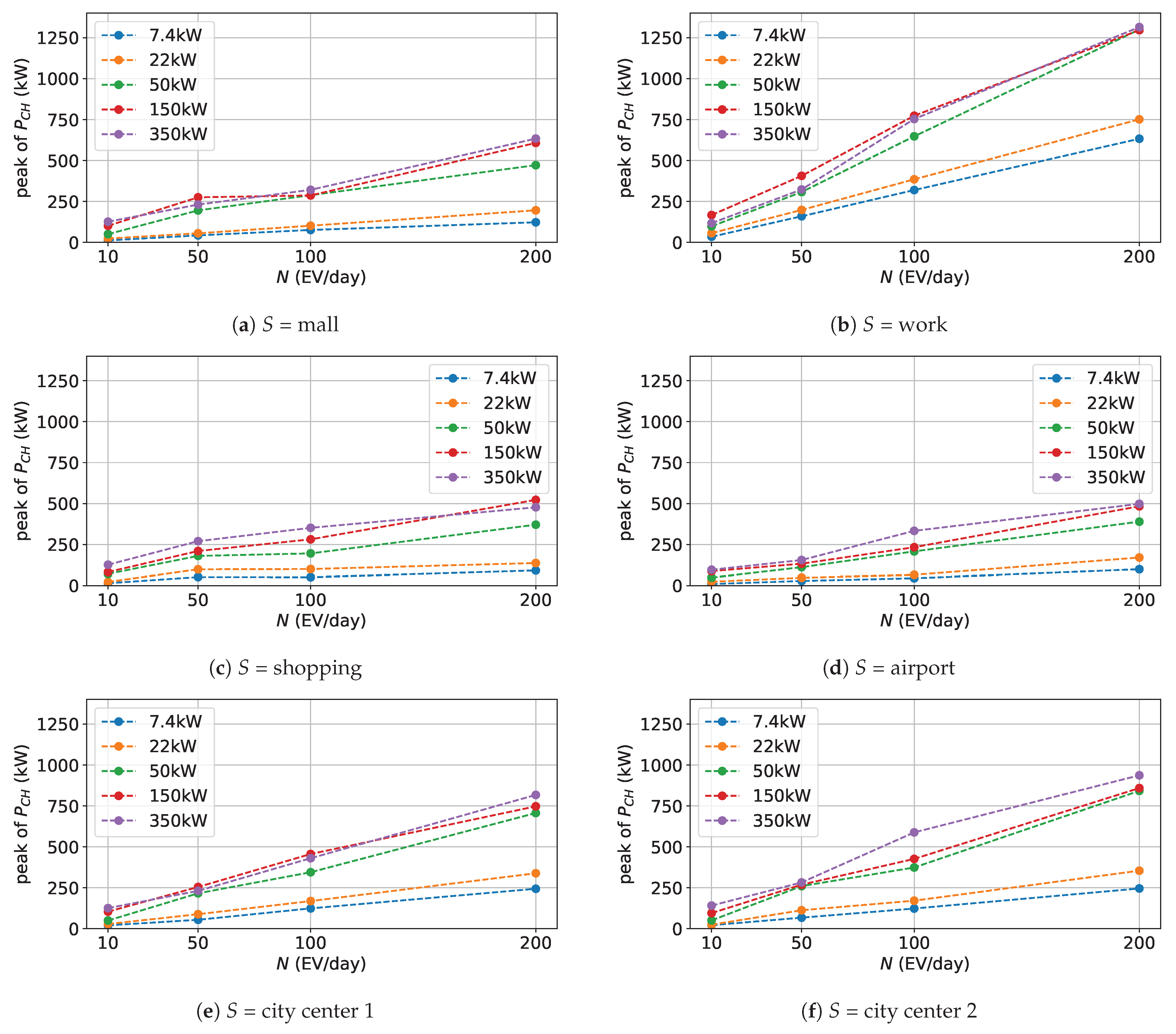
4.1. Analysis on the Charging Hub Peak Power
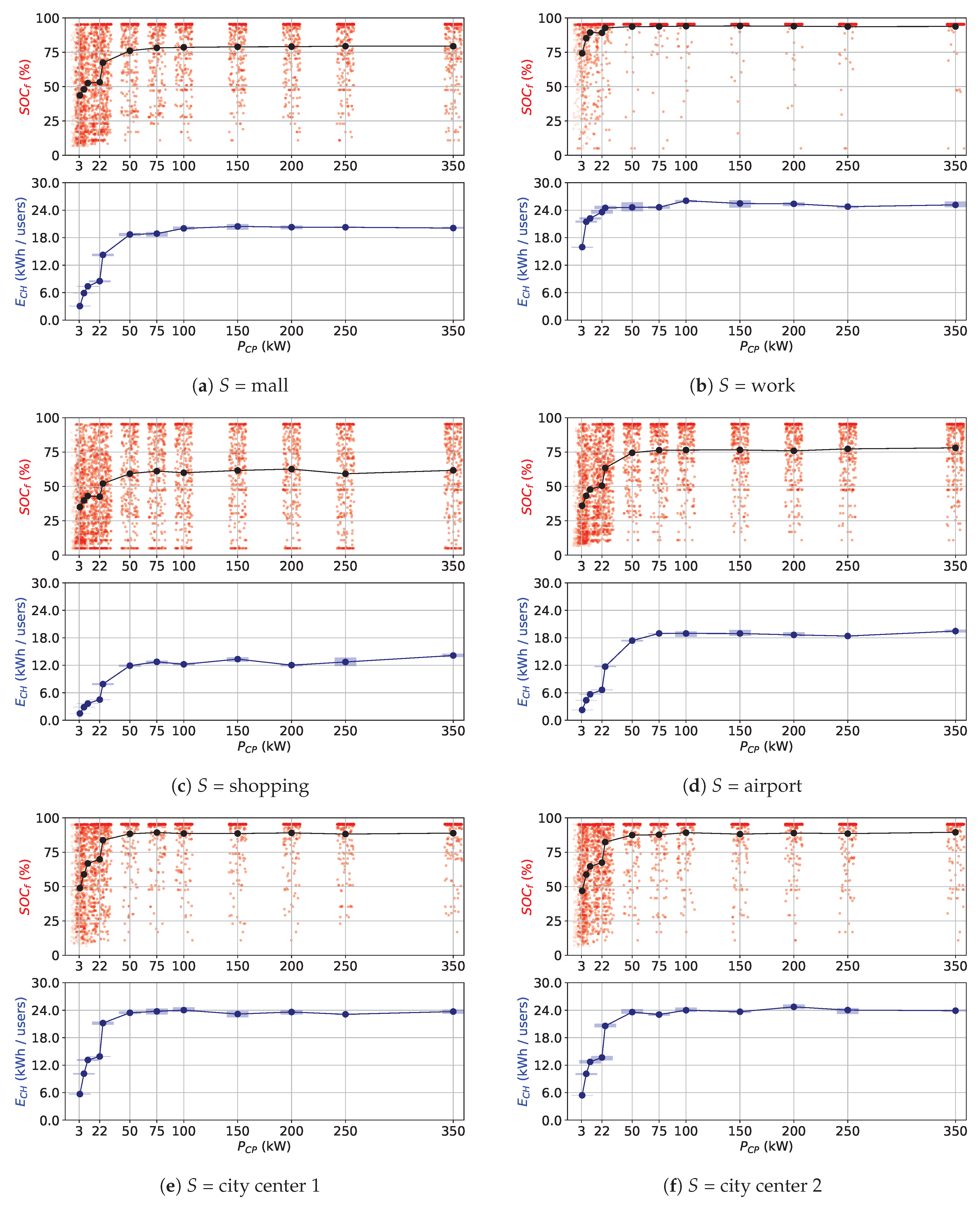
4.2. Analysis on the EV Fleet Charged Energy
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Csonka, B.; Csiszár, C. Determination of charging infrastructure location for electric vehicles. Transp. Res. Procedia 2017, 27, 768–775. [Google Scholar] [CrossRef]
- Andrenacci, N.; Ragona, R.; Valenti, G. A demand-side approach to the optimal deployment of electric vehicle charging stations in metropolitan areas. Appl. Energy 2016, 182, 39–46. [Google Scholar] [CrossRef]
- Fitzgerald, G.; Nelder, C.; Newcomb, J. Electric Vehicles as Distributed Energy Resources; Rocky Mountain Institute: Boulder, CO, USA, 2016. [Google Scholar]
- Deb, S.; Kalita, K.; Mahanta, P. Review of impact of electric vehicle charging station on the power grid. In Proceedings of the 2017 International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 1–23 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Clement, K.; Haesen, E.; Driesen, J. Stochastic analysis of the impact of plug-in hybrid electric vehicles on the distribution grid. In Proceedings of the CIRED 2009—20th International Conference and Exhibition on Electricity Distribution—Part 1, Prague, Czech Republic, 8–11 June 2009; pp. 1–4. [Google Scholar]
- Gomez, J.; Morcos, M. Impact of EV battery chargers on the power quality of distribution systems. IEEE Trans. Power Deliv. 2003, 18, 975–981. [Google Scholar] [CrossRef]
- Lo Franco, F.; Cirimele, V.; Ricco, M.; Monteiro, V.; Afonso, J.L.; Grandi, G. Smart charging for electric car-sharing fleets based on charging duration forecasting and planning. Sustainability 2022, 14, 12077. [Google Scholar] [CrossRef]
- Lo Franco, F.; Ricco, M.; Mandrioli, R.; Grandi, G. Electric vehicle aggregate power flow prediction and smart charging system for distributed renewable energy self-consumption optimization. Energies 2020, 13, 5003. [Google Scholar] [CrossRef]
- Fouladi, E.; Baghaee, H.R.; Bagheri, M.; Gharehpetian, G. Power management of microgrids including PHEVs based on maximum employment of renewable energy resources. IEEE Trans. Ind. Appl. 2020, 56, 5299–5307. [Google Scholar] [CrossRef]
- Lo Franco, F.; Mandrioli, R.; Ricco, M.; Monteiro, V.; Monteiro, L.F.; Afonso, J.L.; Grandi, G. Electric Vehicles Charging Management System for Optimal Exploitation of Photovoltaic Energy Sources Considering Vehicle-to-Vehicle Mode. Front. Energy Res. 2021, 9, 716389. [Google Scholar] [CrossRef]
- Ramadhani, U.H.; Fachrizal, R.; Shepero, M.; Munkhammar, J.; Widén, J. Probabilistic load flow analysis of electric vehicle smart charging in unbalanced LV distribution systems with residential photovoltaic generation. Sustain. Cities Soc. 2021, 72, 103043. [Google Scholar] [CrossRef]
- Vehicles and Fleet|European Alternative Fuels Observatory. Available online: https://alternative-fuels-observatory.ec.europa.eu/transport-mode/road/european-union-eu27/vehicles-and-fleet (accessed on 22 December 2022).
- Immatricolazioni in Italia di Autovetture e Fuoristrada Top-20 BEV 2021. Available online: https://unrae.it/dati-statistici/immatricolazioni (accessed on 22 December 2022).
- Infrastructure|European Alternative Fuels Observatory. Available online: https://alternative-fuels-observatory.ec.europa.eu/transport-mode/road/european-union-eu27/infrastructure (accessed on 22 December 2022).
- Hypercharger by Alpitronic, Model HYC300|Web Site. Available online: https://www.hypercharger.it/hyc300-2/ (accessed on 22 December 2022).
- EV Database. Available online: https://ev-database.org/ (accessed on 22 December 2022).
- Shen, W.; Vo, T.T.; Kapoor, A. Charging algorithms of lithium-ion batteries: An overview. In Proceedings of the 2012 7th IEEE conference on industrial electronics and applications (ICIEA), Singapore, 8–20 July 2012; pp. 1567–1572. [Google Scholar]
- Vehicles-Fastned FAQ. Available online: https://support.fastned.nl/hc/en-gb/categories/4428895407133-Fastned-charging (accessed on 22 December 2022).
- Lee, D.H.; Kim, M.S.; Roh, J.H.; Yang, J.P.; Park, J.B. Forecasting of Electric Vehicles Charging Pattern Using Bayesians method with the Convolustion. IFAC-PapersOnLine 2019, 52, 413–418. [Google Scholar] [CrossRef]
- Zhou, D.; Guo, Z.; Xie, Y.; Hu, Y.; Jiang, D.; Feng, Y.; Liu, D. Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting. Energies 2022, 15, 6195. [Google Scholar] [CrossRef]
- Zhuang, Z.; Zheng, X.; Chen, Z.; Jin, T.; Li, Z. Load Forecast of Electric Vehicle Charging Station Considering Multi-Source Information and User Decision Modification. Energies 2022, 15, 7021. [Google Scholar] [CrossRef]
- Boulakhbar, M.; Farag, M.; Benabdelaziz, K.; Kousksou, T.; Zazi, M. A deep learning approach for prediction of electrical vehicle charging stations power demand in regulated electricity markets: The case of Morocco. Clean. Energy Syst. 2022, 3, 100039. [Google Scholar] [CrossRef]
- Almaghrebi, A.; Aljuheshi, F.; Rafaie, M.; James, K.; Alahmad, M. Data-driven charging demand prediction at public charging stations using supervised machine learning regression methods. Energies 2020, 13, 4231. [Google Scholar] [CrossRef]
- Nespoli, A.; Ogliari, E.; Leva, S. User Behaviour Clustering Based Method for EV Charging Forecast. IEEE Access 2023. [Google Scholar] [CrossRef]
- Recharging Systems|European Alternative Fuels Observatory. Available online: https://alternative-fuels-observatory.ec.europa.eu/general-information/recharging-systems (accessed on 22 December 2022).
- Schmenger, J.; Endres, S.; Zeltner, S.; März, M. A 22 kW on-board charger for automotive applications based on a modular design. In Proceedings of the 2014 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 13–14 October 2014; pp. 1–6. [Google Scholar]
- Arif, S.M.; Lie, T.T.; Seet, B.C.; Ayyadi, S.; Jensen, K. Review of electric vehicle technologies, charging methods, standards and optimization techniques. Electronics 2021, 10, 1910. [Google Scholar] [CrossRef]
- European Union (EU27)|European Alternative Fuels Observatory. Available online: https://alternative-fuels-observatory.ec.europa.eu/transport-mode/road/european-union-eu27 (accessed on 22 December 2022).
- Federal Highway Administration. National Household Travel Survey; U.S. Department of Transportation: Washington, DC, USA, 2017. Available online: https://nhts.ornl.gov (accessed on 22 December 2022).
- Franco, F.L.; Ricco, M.; Mandrioli, R.; Paternost, R.F.; Grandi, G. State of Charge Optimization-based Smart Charging of Aggregate Electric Vehicles from Distributed Renewable Energy Sources. In Proceedings of the 2021 IEEE 15th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Florence, Italy, 14–16 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Franco, F.L.; Ricco, M.; Mandrioli, R.; Viatkin, A.; Grandi, G. Current Pulse Generation Methods for Li-ion Battery Chargers. In Proceedings of the 2020 2nd IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Cagliari, Italy, 1–3 September 2020; Volume 1, pp. 339–344. [Google Scholar]
- Schaden, B.; Jatschka, T.; Limmer, S.; Raidl, G.R. Smart Charging of Electric Vehicles Considering SOC-Dependent Maximum Charging Powers. Energies 2021, 14, 7755. [Google Scholar] [CrossRef]
- Schmid, M.; Hothorn, T. Flexible boosting of accelerated failure time models. BMC Bioinform. 2008, 9, 1–13. [Google Scholar] [CrossRef]
- Scikit-Learn—Machine Learning in Python. Available online: https://scikit-learn.org/stable/ (accessed on 22 December 2022).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Machine Learning Algorithm Cheat Sheet-Designer-Azure Machine Learning|Microsoft Learn. Available online: https://learn.microsoft.com/en-us/azure/machine-learning/algorithm-cheat-sheet (accessed on 22 December 2022).
- Li, P.; Wu, Q.; Burges, C. Mcrank: Learning to rank using multiple classification and gradient boosting. In Proceedings of the Advances in Neural Information Processing Systems, Whistler, BC, Canada, 12 December 2008; pp. 897–904. [Google Scholar]
- Friedman, J.; Hastie, T.; Tibshirani, R. Additive logistic regression: A statistical view of boosting (with discussion and a rejoinder by the authors). Ann. Stat. 2000, 28, 337–407. [Google Scholar] [CrossRef]
- Natekin, A.; Knoll, A. Gradient boosting machines, a tutorial. Front. Neurorobot. 2013, 7, 21. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Train and Evaluate Regression Models-Training|Microsoft Learn. Available online: https://learn.microsoft.com/en-us/training/modules/train-evaluate-regression-models/ (accessed on 22 December 2022).
- GradientBoostingRegressor-Scikit-Learn-Machine Learning in Python. Available online: https://scikit-learn.org/stable/modules/generated/sklearn.ensemble.GradientBoostingRegressor.html (accessed on 22 December 2022).
- Kvalseth, T.O. Cautionary Note about R2. Am. Stat. 1985, 39, 279–285. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Sub-Category | Power Output | Definition |
|---|---|---|---|
| Slow AC charging point, single-phase | Normal power | ||
| Category 1 (AC) | Medium AC charging point, triple-phase | Normal power | |
| Fast AC charging point, triple-phase | High power | ||
| Slow DC charging point | High power | ||
| Category 2 (DC) | Fast DC charging point | High power | |
| Level 1—Ultra-fast DC charging point | High power | ||
| Level 2—Ultra-fast DC charging point | High power |
| Car Park Scenario | Name | Data Source | Parking Lots | Average |
|---|---|---|---|---|
| working place | working | survey | not defined | 6.5 h |
| shopping area | shopping | survey | not defined | 42 min |
| mall car park | mall | collection campaign | 210 | 62 min |
| airport car park | airport | collection campaign | 1972 | 79 min |
| municipal car park | city-center 1 | collection campaign | 350 | 136 min |
| paid public car park | city-center 2 | collection campaign | 200 | 128 min |
| Symbol | Description |
|---|---|
| input data | |
| N | daily number of vehicles arriving to the CH |
| charging station power rating | |
| charging station category, AC or DC charging point | |
| S | parking lot scenario |
| output data | |
| daily power profile of each | |
| daily total power profile required by the whole CH | |
| state of charge evolution of each |
| Model | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | FIAT 500e | 0 | 37.3 | 34 | 11 | 85 | 8:15 | 15:00 | 6.75 |
| 2 | Tesla M3 | 4 | 75 | 23 | 11 | 210 | 10:00 | 17:45 | 7.75 |
| 3 | Renault ZOE | 13 | 52 | 67 | 22 | 46 | 7:45 | 10:30 | 2.25 |
| 4 | FIAT 500e | 0 | 37.3 | 51 | 11 | 85 | 9:30 | 16:00 | 6.50 |
| 5 | VW UP! | 8 | 36.8 | 15 | 7.4 | 40 | 8:00 | 12:00 | 4.00 |
| Input Parameter | Simulation Setting Value | Unit | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3.6 | 7.4 | 11 | 22 | 25 | 50 | 75 | 100 | 150 | 200 | 250 | 350 | kW | |
| AC | AC | AC | AC | DC | DC | DC | DC | DC | DC | DC | DC | - | |
| N | 10, 50, 100, 200 | EV/day | |||||||||||
| S | work, mall, airport, city center 1, city center 2, shopping | - | |||||||||||
| Parking Scenario (S) | Optimal CP Number (N = 100 EV/day) | Optimal (kW) | Peak of (kW) | Average (kWh/EV) |
|---|---|---|---|---|
| mall | 12 | 50 (DC) | 288 | 18 |
| working | 63 | 22 (AC) | 385 | 25 |
| shopping | 7 | 75 (DC) | 200 | 12 |
| airport | 8 | 75 (DC) | 250 | 18 |
| city center 1 | 13 | 50 (DC) | 344 | 24 |
| city center 2 | 22 | 50 (DC) | 377 | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo Franco, F.; Ricco, M.; Cirimele, V.; Apicella, V.; Carambia, B.; Grandi, G. Electric Vehicle Charging Hub Power Forecasting: A Statistical and Machine Learning Based Approach. Energies 2023, 16, 2076. https://doi.org/10.3390/en16042076
Lo Franco F, Ricco M, Cirimele V, Apicella V, Carambia B, Grandi G. Electric Vehicle Charging Hub Power Forecasting: A Statistical and Machine Learning Based Approach. Energies. 2023; 16(4):2076. https://doi.org/10.3390/en16042076
Chicago/Turabian StyleLo Franco, Francesco, Mattia Ricco, Vincenzo Cirimele, Valerio Apicella, Benedetto Carambia, and Gabriele Grandi. 2023. "Electric Vehicle Charging Hub Power Forecasting: A Statistical and Machine Learning Based Approach" Energies 16, no. 4: 2076. https://doi.org/10.3390/en16042076
APA StyleLo Franco, F., Ricco, M., Cirimele, V., Apicella, V., Carambia, B., & Grandi, G. (2023). Electric Vehicle Charging Hub Power Forecasting: A Statistical and Machine Learning Based Approach. Energies, 16(4), 2076. https://doi.org/10.3390/en16042076