
Optimal Control of TBCC Engines in Mode Transition


Abstract
:1. Introduction
2. XTER Modeling and Problem Description
2.1. Aerothermodynamic Modeling
- Combined inlet model
- Turbojet channel model
- Ejector-Ramjet channel model
- Scramjet channel model
- Dynamic characteristics of main components
2.2. Control-Oriented LPV Model
- Turbojet’s LPV model
- Ejector-Ramjet’s LPV model
- Scramjet’s LPV model
- LPV model in mode transition from Turbojet to Ejector-Ramjet
- LPV model of transition-mode from Ejector-Ramjet to Scramjet
2.3. Problem Description
3. Main Results
- (1)
- State equation constraint
- (2)
- Costate equation constraint
- (3)
- Hamilton function endpoint constraints
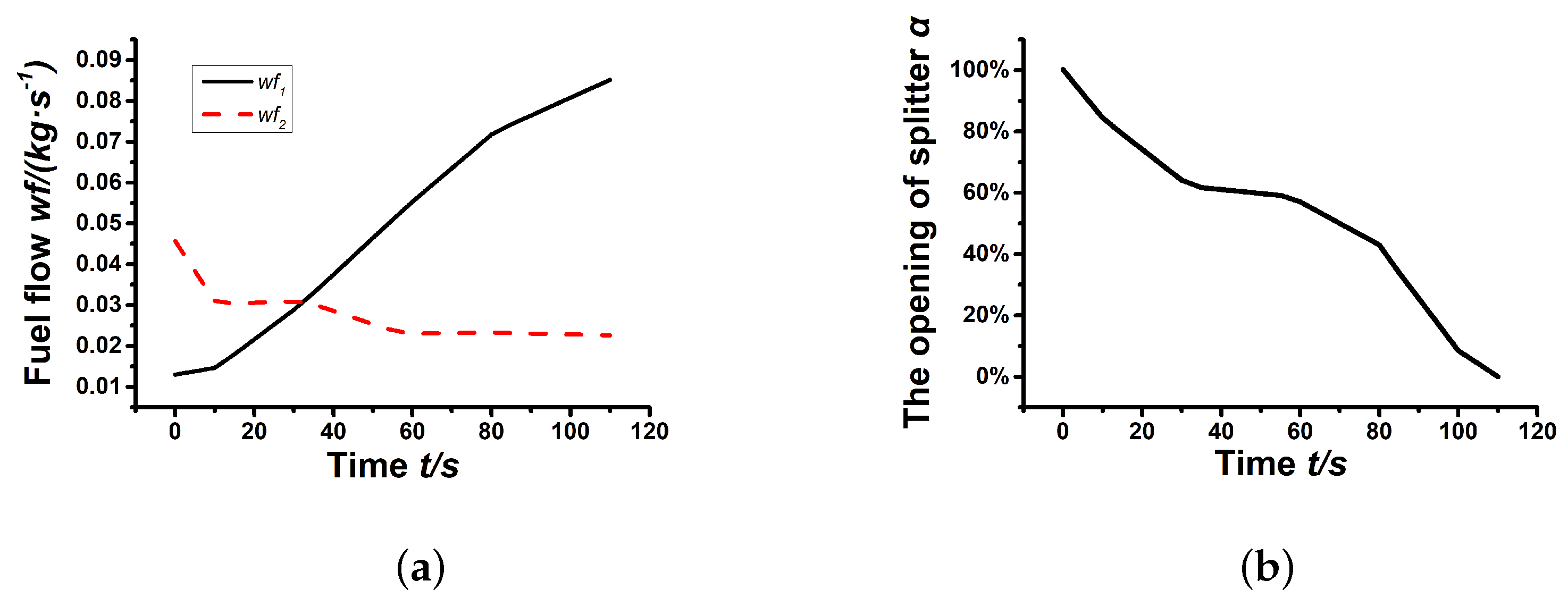
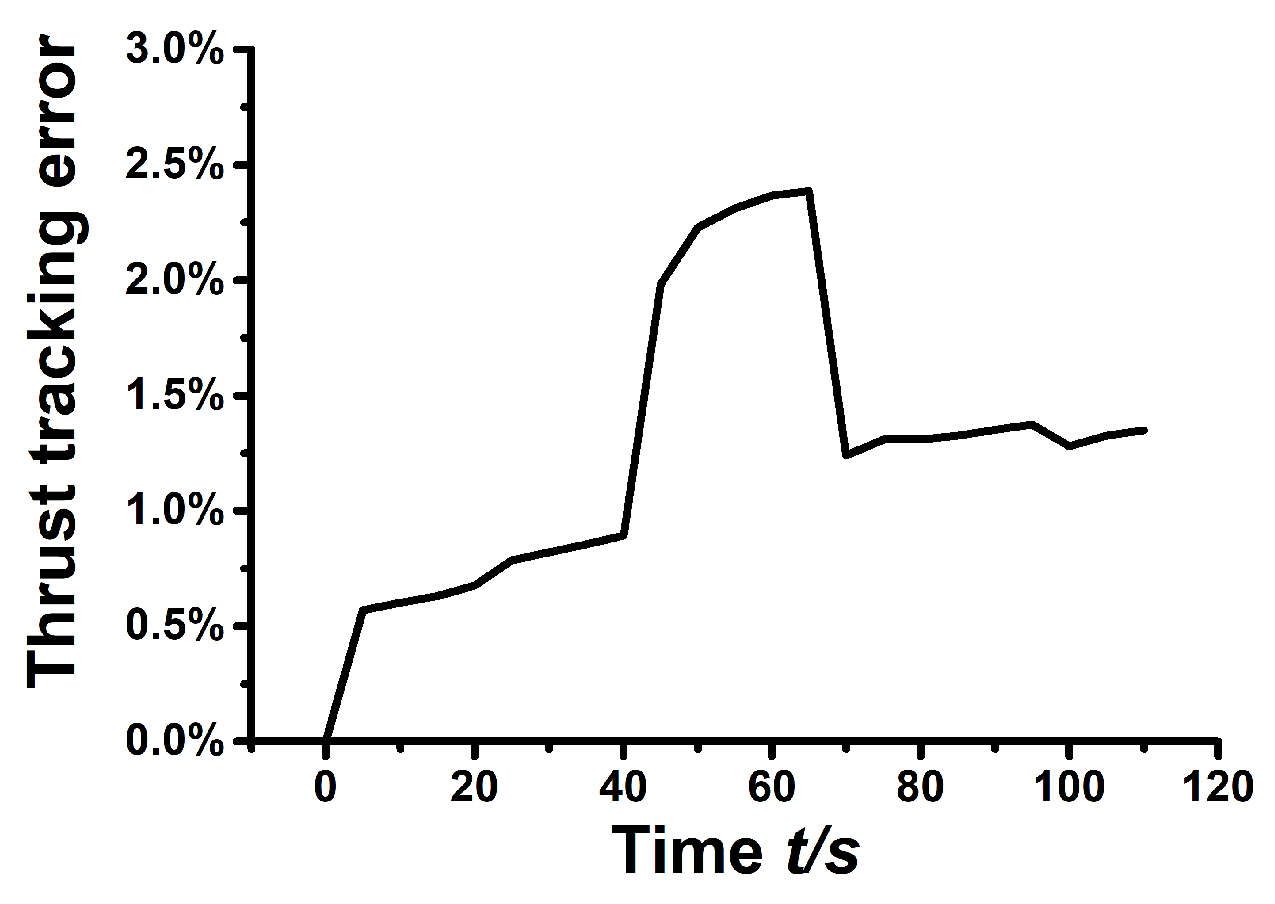
4. Simulation Analysis
- (I)
- Turbojet channel’s fuel flow:
- (II)
- Ejector-ramjet channel’s fuel flow:
- (III)
- The opening of the splitter:
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Walker, S.; Tang, M.; Mamplata, C. TBCC propulsion for a Mach 6 hypersonic airplane. In Proceedings of the 16th AIAA/DLR/DGLR International Space Planes and Hypersonic Systems and Technologies Conference, Bremen, Germany, 19–22 October 2009. [Google Scholar]
- Hueter, U.; McClinton, C.; Cook, S. NASA’s advanced space transportation hypersonic program. In Proceedings of the 11th AIAA/AAAF International Conference Space Planes and Hypersonics Systems and Technologies Conference, Orleans, France, 29 September–4 October 2002. [Google Scholar]
- Liu, J.; Yuan, H.C.; Ge, L. Design and flow characteristics analysis of mode transition simulator for tandem type TBCC inlet. Acta Aeronaut. Astronaut. Sin. 2016, 37, 3675–3684. [Google Scholar]
- Guo, F.; Zhu, J.F.; You, Y.C. Performance coupling analysis and optimal design of rocket-assisted turbine-based combined cycle engines. Acta Aeronaut. Astronaut. Sin. 2021, 42, 124755. [Google Scholar]
- Bartolotta, P.; McNelis, N. NASA’s Advanced Space Transportation Program: RTA Project Summary. In Proceedings of the 2001 NASA Seal/Secondary Air System Workshop, Cleveland, OH, USA, 30–31 October 2001; pp. 69–78. [Google Scholar]
- Mamplata, C.; Tang, M. Technical approach to turbine-based combined cycle: FaCET. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, CO, USA, 2–5 August 2009. [Google Scholar]
- Siebenhaar, A.; Bogar, T. Integration and vehicle performance assessment of the aerojet “TriJet” combined-cycle engine. In Proceedings of the 16th AIAA/DLR/DGLR International Space Planes and Hypersonic Systems and Technologies Conference, Bremen, Germany, 19–22 October 2009. [Google Scholar]
- Saunders, J.D.; Stueber, T.J.; Thomas, S.R.; Suder, K.L.; Weir, L.J.; Sanders, B.W. Testing of the NASA Hypersonics Project Combined Cycle Engine Large Scale Inlet Mode Transition Experiment (CCE LlMX). In Proceedings of the 58th Joint Army-Navy-NASA-Air Force (JANNAF) Propulsion Meeting, Cleveland, OH, USA, 25 August 2013. [Google Scholar]
- Ito, M. International collaboration in super/hypersonic propulsion system research project (HYPR). Aeronaut. J. 2000, 104, 445–451. [Google Scholar] [CrossRef]
- Sato, T.; Tanatsugu, N.; Naruo, Y.; Omi, J.; Tomike, J.; Nishino, T. Development study on ATREX engine. Acta Astronaut 2000, 47, 799–808. [Google Scholar] [CrossRef]
- Weingertner, S. SÄNGER-The reference concept of the german hypersonics technology program. In Proceedings of the 5th International Aerospace Planes and Hypersonics Technologies Conference, Munich, Germany, 30 November–3 December 1993. [Google Scholar]
- Langener, T.; Erb, S.; Steelant, J.; Flight, H. Trajectory simulation and optimization of the LAPCAT MR2 hypersonic cruiser concept. ICAS 2014, 2014, 428. [Google Scholar]
- Wei, B.X.; Ling, W.H.; Gang, Q.; Wei, X.G.; Qin, F.; He, G.Q. Analysis of key technologies and propulsion performance research of TRRE engine. J. Propuls. Technol. 2017, 38, 298–305. [Google Scholar]
- Hui, Y.; Jun, M.; Man, Y.; Zhu, S.; Ling, W.; Cao, X. Numerical simulation of variable-geometry inlet for TRRE combined cycle engine. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017. [Google Scholar]
- Wei, B.X.; Ling, W.H.; Luo, F.; Gang, Q. Propulsion performance research and status of TRRE engine experiment. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Xiamen, China, 6–9 March 2017. [Google Scholar]
- Krouse, C.; Connolly, B.; Gordon, E. Integration of Inlet and Combustor Subsystem Models into a TBCC Engine Performance Model. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022. [Google Scholar]
- Marshall, A.; Gupta, A.; Lavelle, T.; Lewis, M. Critical issues in TBCC modeling. In Proceedings of the 40th AIAA/ASME/SAE/ ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Gamble, E.; Haid, D.; D’Alessandro, S. Thermal management and fuel system model for TBCC dynamic simulation. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010. [Google Scholar]
- Gamble, E.; Haid, D.; D’Alessandro, S.; DeFrancesco, R. Dual-mode scramjet performance model for tbcc simulation. In Proceedings of the 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Denver, CO, USA, 2–5 August 2009. [Google Scholar]
- Kong, F.Q.; Chen, Y.C.; Zheng, S.Z.; Zhao, Z.N. Overall Performance Modeling and Performance Analysis of Hydrogen Precooled Turbine Engine. In Proceedings of the 2022 13th International Conference on Mechanical and Aerospace Engineering (ICMAE), Bratislava, Slovakia, 20–22 July 2022. [Google Scholar]
- Zhang, M.Y.; Wang, Z.X.; Liu, Z.W.; Zhang, X.B. Analysis of Mode Transition Performance for a Tandem TBCC Engine. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- Yu, X.; Li, P.; Zhang, Y. The Design of Fixed-Time Observer and Finite-Time Fault-Tolerant Control for Hypersonic Gliding Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 4135–4144. [Google Scholar] [CrossRef]
- Bu, X. Air-Breathing Hypersonic Vehicles Funnel Control Using Neural Approximation of Non-affine Dynamics. IEEE/ASME Trans. Mechatronics 2018, 23, 2099–2108. [Google Scholar] [CrossRef]
- Bu, X.; Qi, Q. Fuzzy Optimal Tracking Control of Hypersonic Flight Vehicles via Single-Network Adaptive Critic Design. IEEE Trans. Fuzzy Syst. 2022, 30, 270–278. [Google Scholar] [CrossRef]
- Ma, J.; Chang, J.; Ma, J.; Bao, W.; Yu, D. Mathematical modeling and characteristic analysis for over-under turbine based combined cycle engine. Acta Astronaut. 2018, 148, 141–152. [Google Scholar] [CrossRef]
- Bulman, M.; Siebenhaar, A. Combined cycle propulsion: Aerojet innovations for practical hypersonic vehicles. In Proceedings of the 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, San Francisco, CA, USA, 11–14 April 2011. [Google Scholar]
- Koff, B.L. Gas turbine technology evolution: A designers perspective. J. Propuls. Power 2004, 20, 577–595. [Google Scholar] [CrossRef]
- Miyagi, H.; Kimura, H.; Cabe, J.; Powell, T.; Yanagi, R. Combined cycle engine research in Japanese HYPR program. In Proceedings of the 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, OH, USA, 13–15 July 1998. [Google Scholar]
- McNelis, N.; Bartolotta, P. Revolutionary turbine accelerator (RTA) demonstrator. In Proceedings of the AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies Conference, Capua, Italy, 16–20 May 2005. [Google Scholar]
- Zou, Z.P.; Liu, H.X. Precooling technology study of hypersonic aeroengine. Acta Aeronaut. Astronaut. Sin. 2015, 36, 2544–2562. [Google Scholar]
- Guo, F.; Gui, F.; You, Y.C. Experimental Study of TBCC Engine Performance in Low Speed Wind Tunnel. J. Propuls. Technol. 2019, 40, 2436–2443. [Google Scholar]
- Guo, F.; Luo, W.; Gui, F.; Zhu, J.; You, Y.; Xing, F. Efficiency Analysis and Integrated Design of Rocket-Augmented Turbine-Based Combined Cycle Engines with Trajectory Optimization. Energies 2020, 13, 2911. [Google Scholar] [CrossRef]
- DeCastro, J.; Litt, J.; Frederick, D. A modular aero-propulsion system simulation of a large commercial aircraft engine. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Hartford, CT, USA, 21–23 July 2008. [Google Scholar]
- Sellers, J.F.; Daniele, C.J. DYNGEN: A Program for Calculating Steady-State and Transient Performance of Turbojet and Turbofan Engines; National Aeronautics and Space Administration: Washington, DC, USA, 1975; pp. 3–18. [Google Scholar]
- Dutton, J.C.; Mikkelsen, C.D.; Addy, A.L. A theoretical and experimental investigation of the constant area, supersonic-supersonic ejector. AIAA J. 1982, 20, 1392–1400. [Google Scholar] [CrossRef]
- Emanuel, G. Optimum performance for a single-stage gaseous ejector. AIAA J. 1976, 14, 1292–1296. [Google Scholar] [CrossRef]
- Shapiro, A.H. The Dynamics and Thermodynamics of Compressible Fluid Flow; Ronald Press: New York, NY, USA, 1953. [Google Scholar]
- Kopasakis, G.; Connolly, J.W.; Paxson, D.E.; Ma, P. Volume dynamics propulsion system modeling for supersonics vehicle research. J. Turbomach. 2010, 132, 041003. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Wang, X.; Shi, J. Gain scheduling controller of the aero-engine based on LPV model. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016. [Google Scholar]
- Briat, C. Linear parameter-varying and time-delay systems. Anal. Obs. Filter. Control 2014, 3, 5–7. [Google Scholar]
- Yuan, C.; Wu, F. Robust and switched feedforward control of uncertain LFT systems. Int. J. Robust Nonlinear Control 2016, 26, 1841–1856. [Google Scholar] [CrossRef]
- Jiang, Y.; Jiang, Z. Computational adaptive optimal control for continuous-time linear systems with completely unknown dynamics. Automatica 2012, 48, 2699–2704. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (N) | / | / | (kg·s) | (kg·s) | ||
|---|---|---|---|---|---|---|
| 2.0 | 2896 | 100% | 0% | 100% | 0.05 | 0.012 |
| 2.1 | 3132 | 80% | 20% | 80% | 0.035 | 0.014 |
| 2.2 | 3389 | 60% | 40% | 60% | 0.035 | 0.029 |
| 2.3 | 3321 | 40% | 60% | 40% | 0.03 | 0.052 |
| 2.4 | 3182 | 20% | 80% | 20% | 0.02 | 0.072 |
| 2.5 | 2839 | 0% | 100% | 0% | 0.02 | 0.085 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Zhang, J.; Sun, H. Optimal Control of TBCC Engines in Mode Transition. Energies 2023, 16, 1791. https://doi.org/10.3390/en16041791
He Z, Zhang J, Sun H. Optimal Control of TBCC Engines in Mode Transition. Energies. 2023; 16(4):1791. https://doi.org/10.3390/en16041791
Chicago/Turabian StyleHe, Zengming, Junlong Zhang, and Hongfei Sun. 2023. "Optimal Control of TBCC Engines in Mode Transition" Energies 16, no. 4: 1791. https://doi.org/10.3390/en16041791
APA StyleHe, Z., Zhang, J., & Sun, H. (2023). Optimal Control of TBCC Engines in Mode Transition. Energies, 16(4), 1791. https://doi.org/10.3390/en16041791