
Power Electronics Converters for Electric Vehicle Auxiliaries: State of the Art and Future Trends

 ,
,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. APM Requirements, Standards, and Design Challenges
2.1. Galvanic Isolation Requirement
- 1.
- Leakage inductance of the transformer and the DC cables inductance interact with the equivalent system capacitance, which results in high voltage oscillation () on the switches.
- 2.
- The weight and size of the converter increase (low power density).
- 3.
- The voltage ripples on the HV DC busbar increase.
- 4.
- Electromagnetic interference (EMI) increases.
2.2. Input and Output Filter Requirements
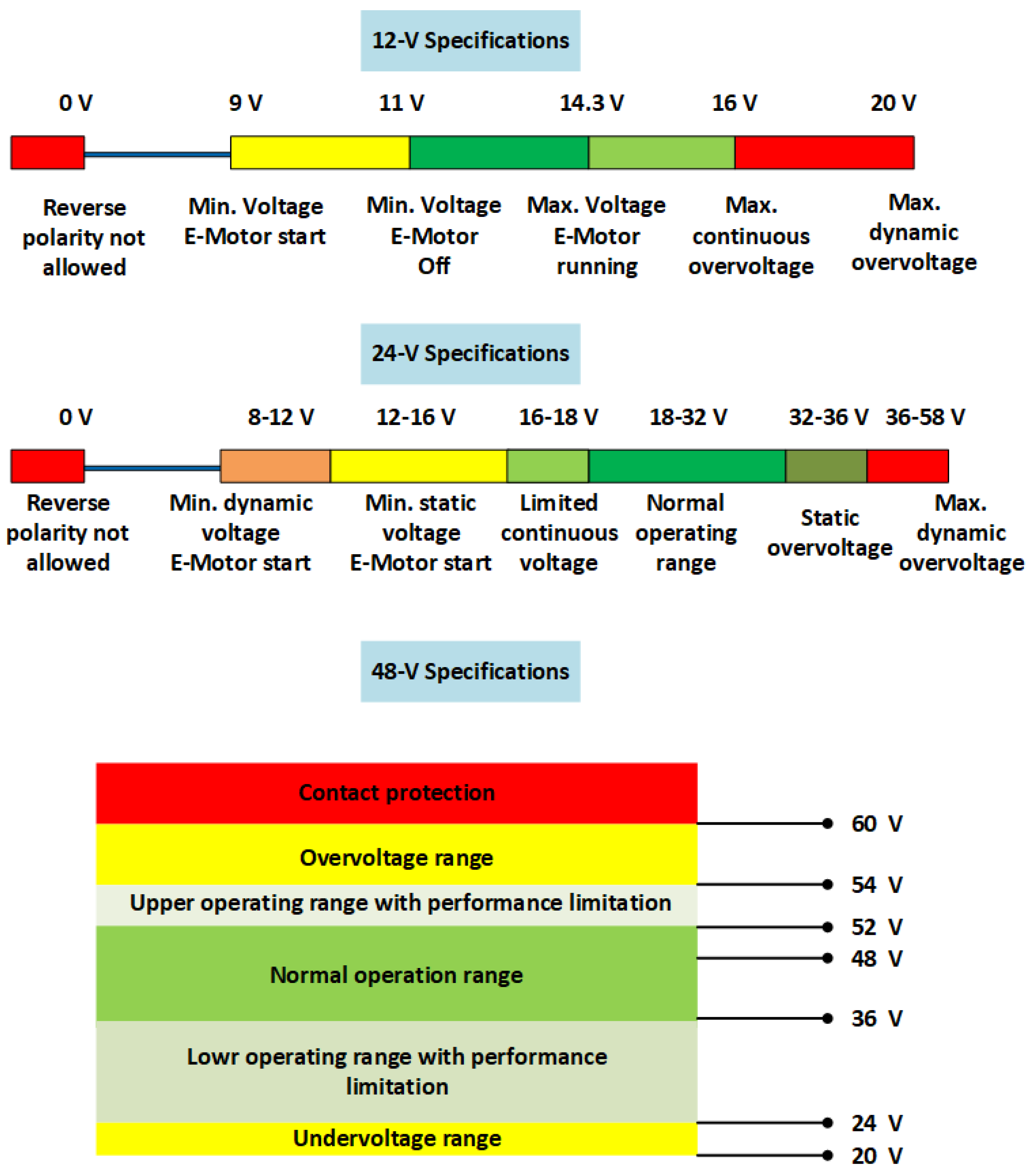
2.3. Electrical Requirements
2.4. Efficiency Requirements
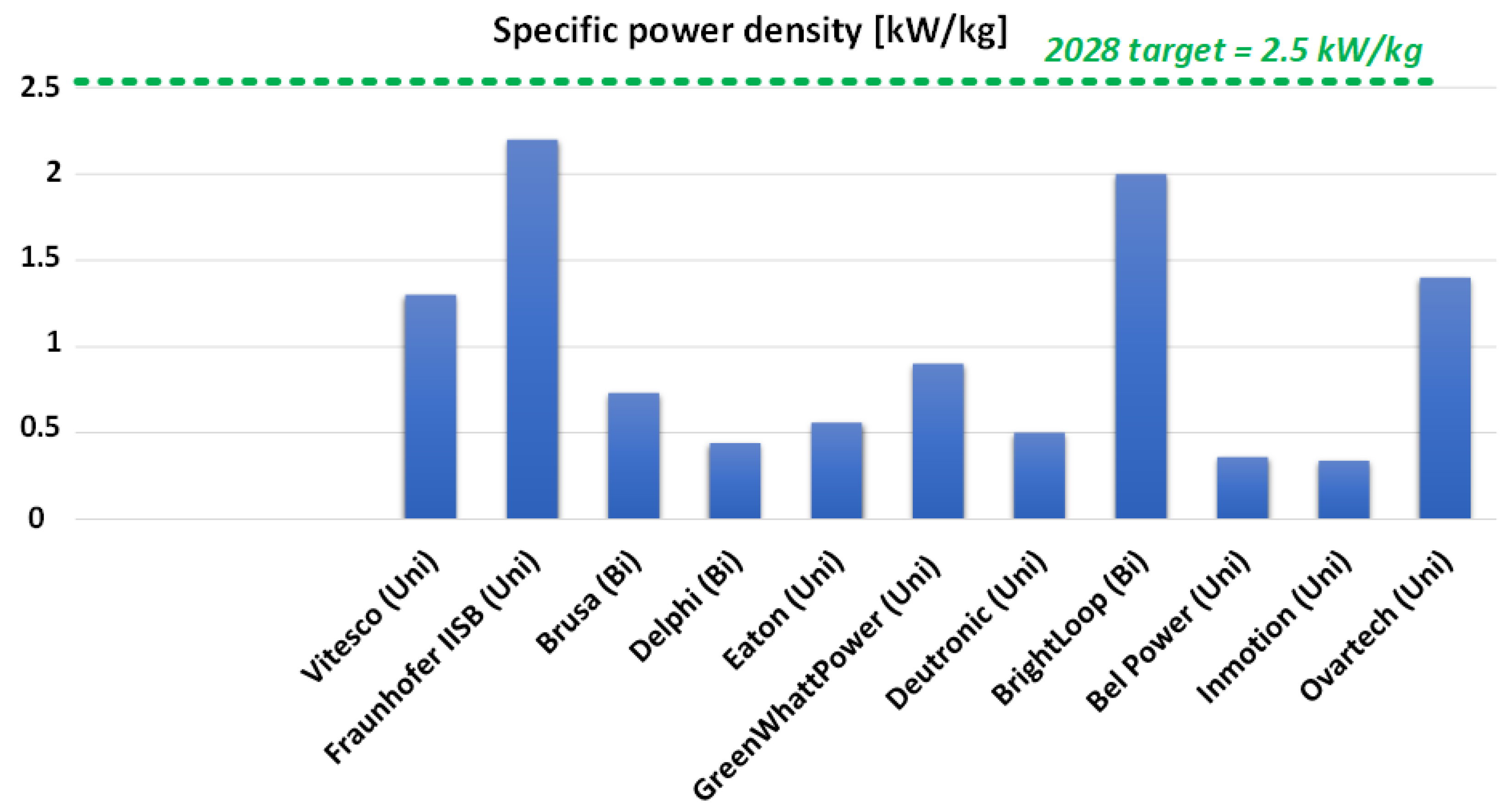
2.5. Power Density Requirements
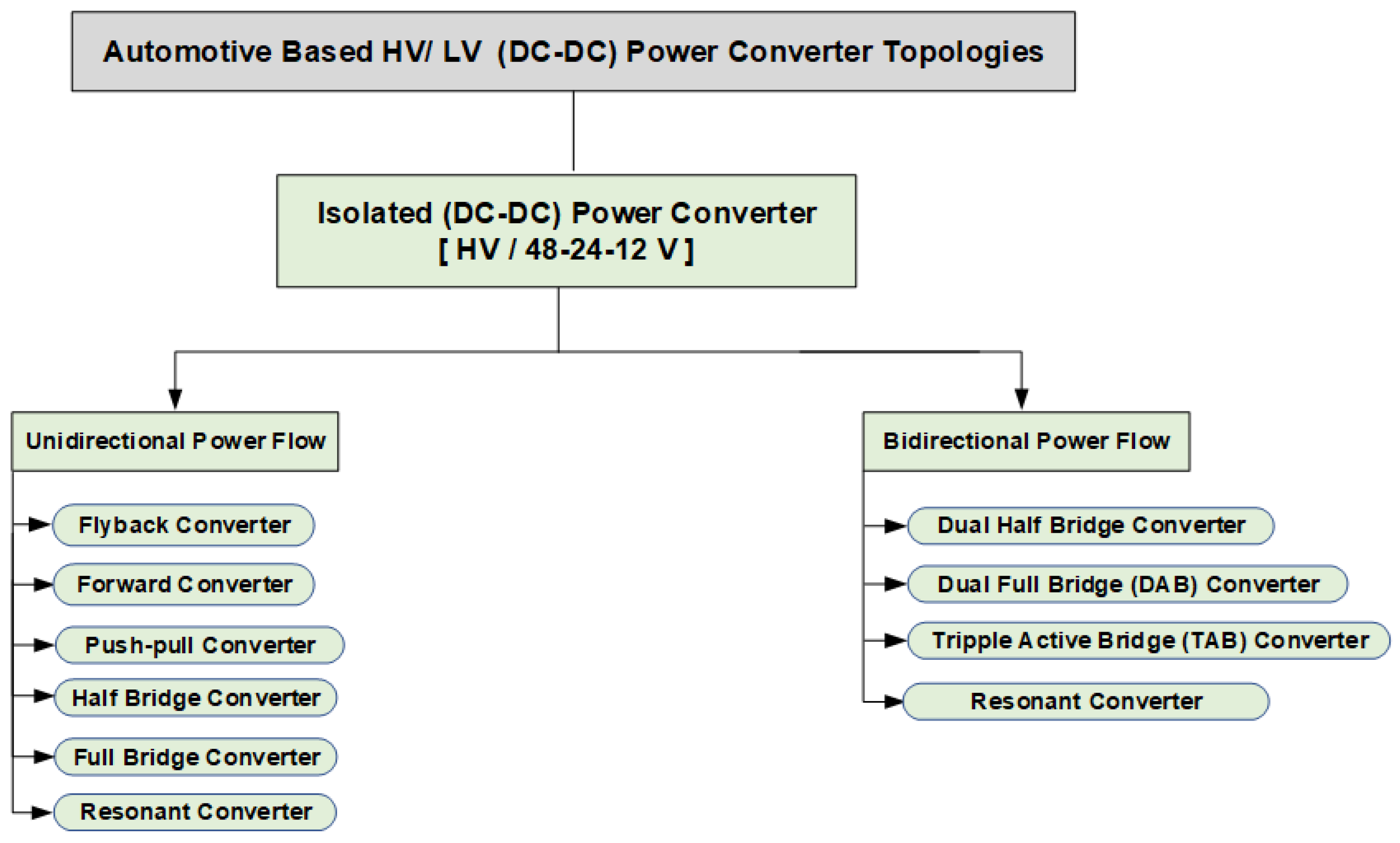
3. APM State-of-the-Art Topologies
3.1. Unidirectional HV-LV Isolated DC-DC Converters
- a transformer for galvanic isolation
- a switching element on the HV battery side to control the power flow and output voltage
- a passive rectification stage on the secondary side.
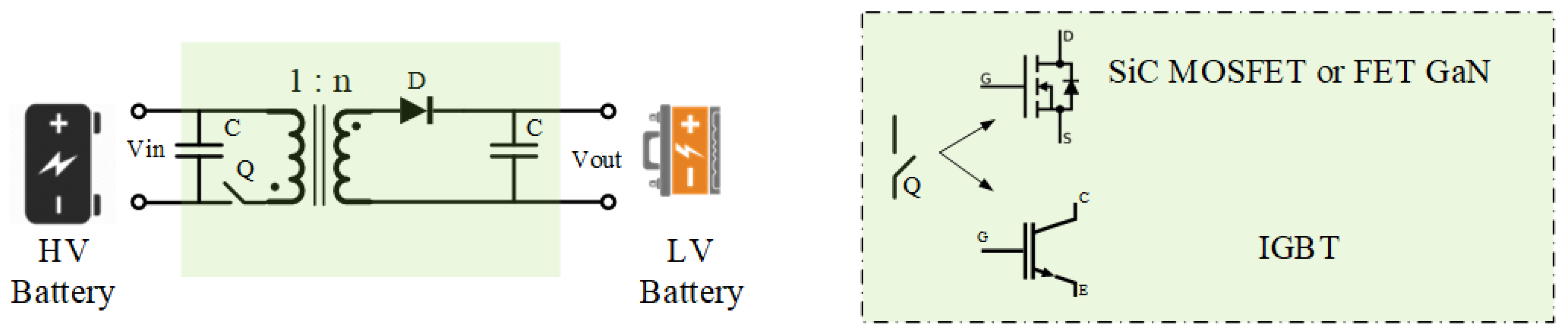
3.1.1. Flyback Converter
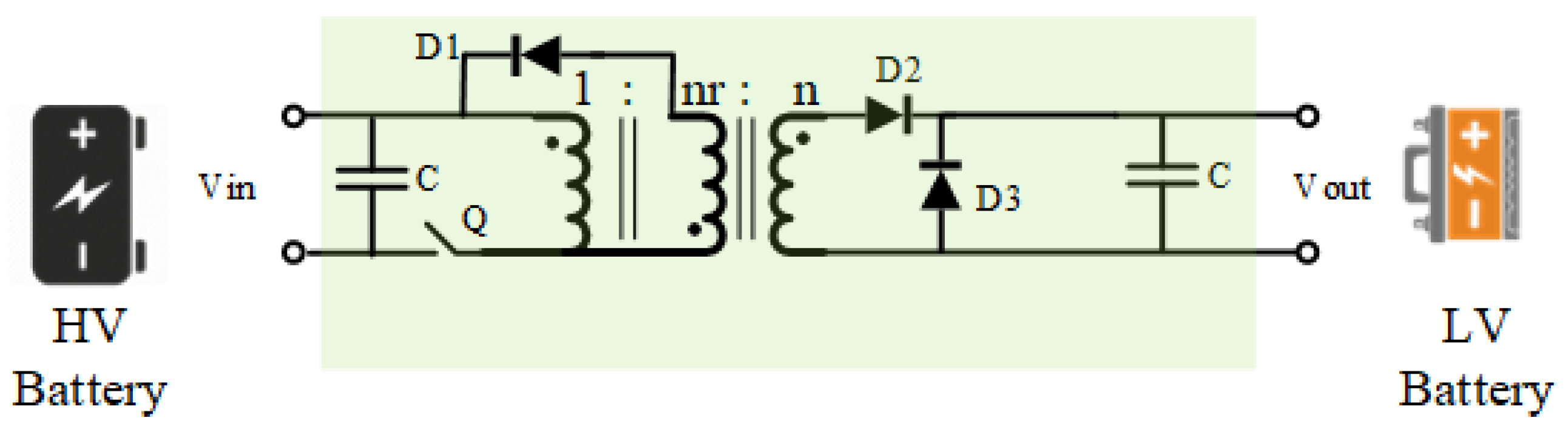
3.1.2. Forward Converter
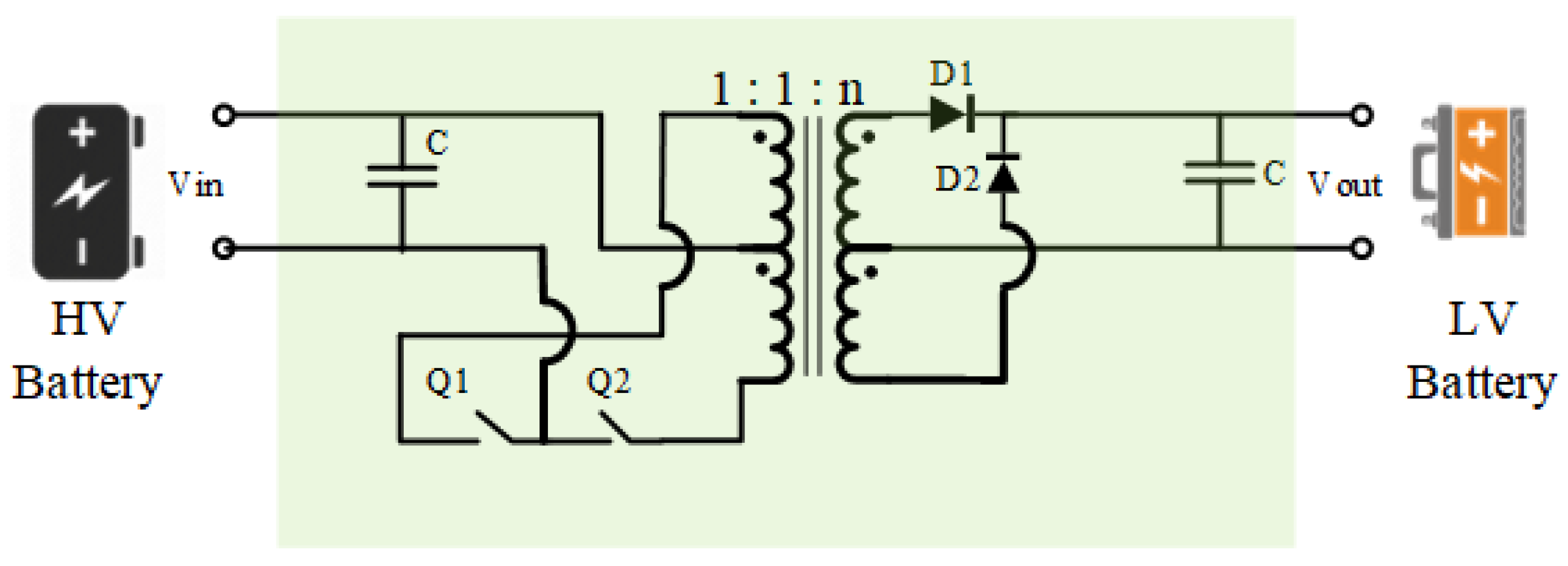
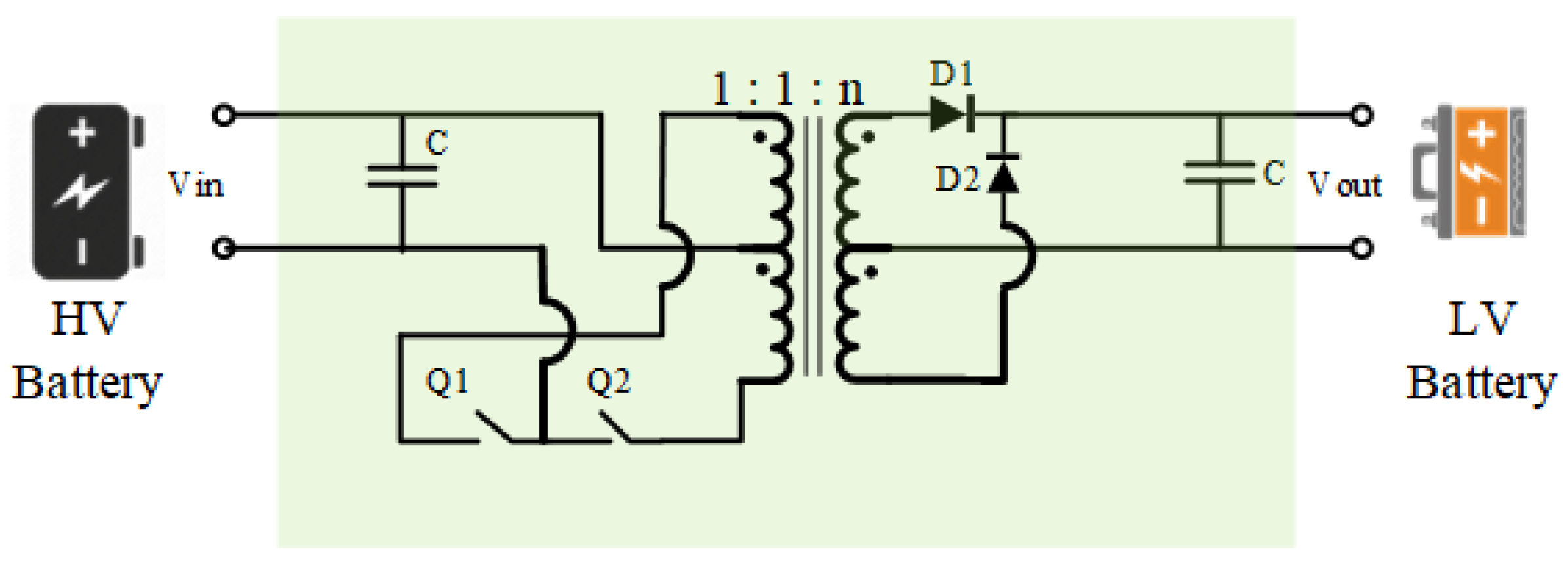
3.1.3. Push-Pull Converter
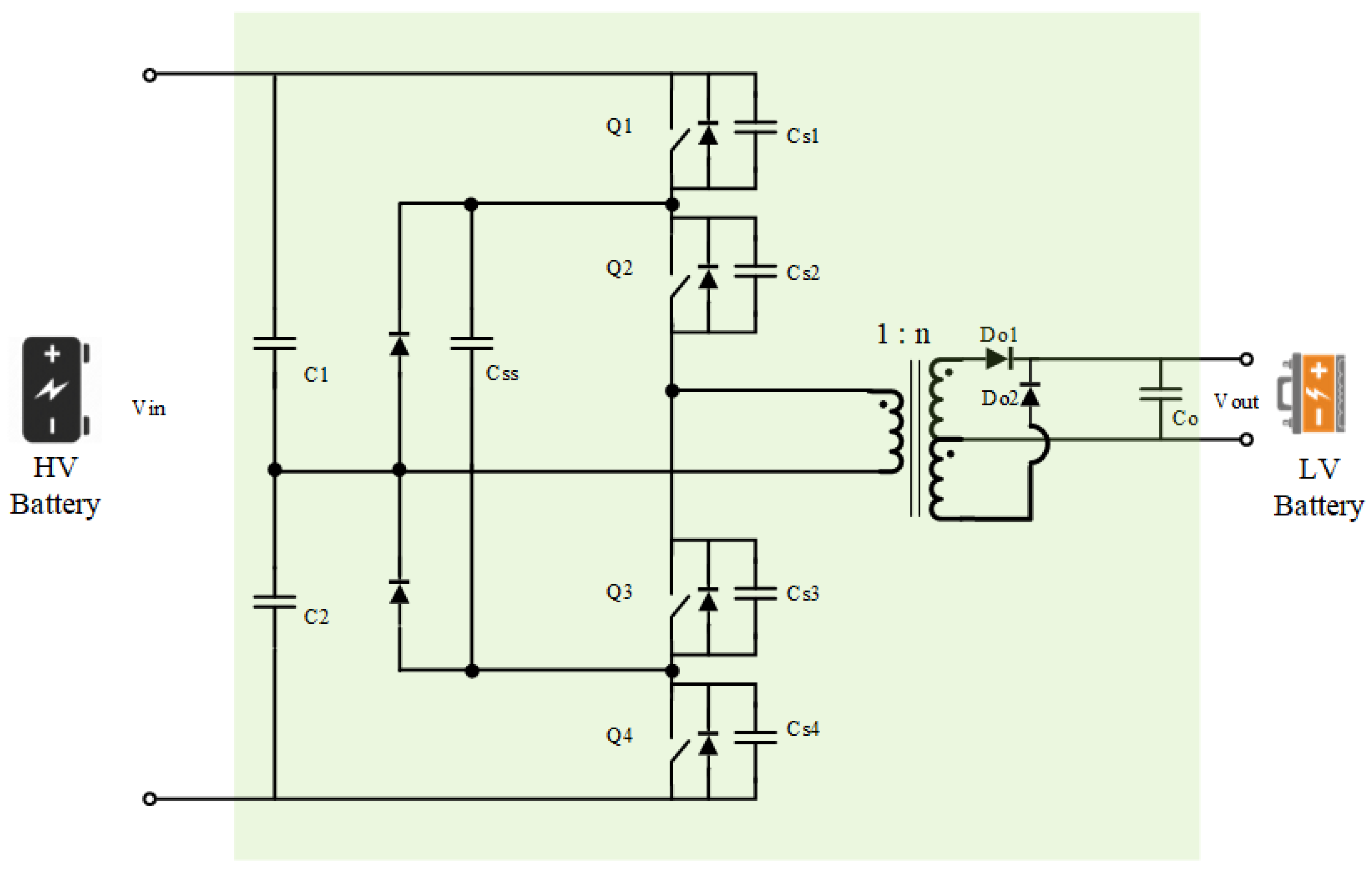
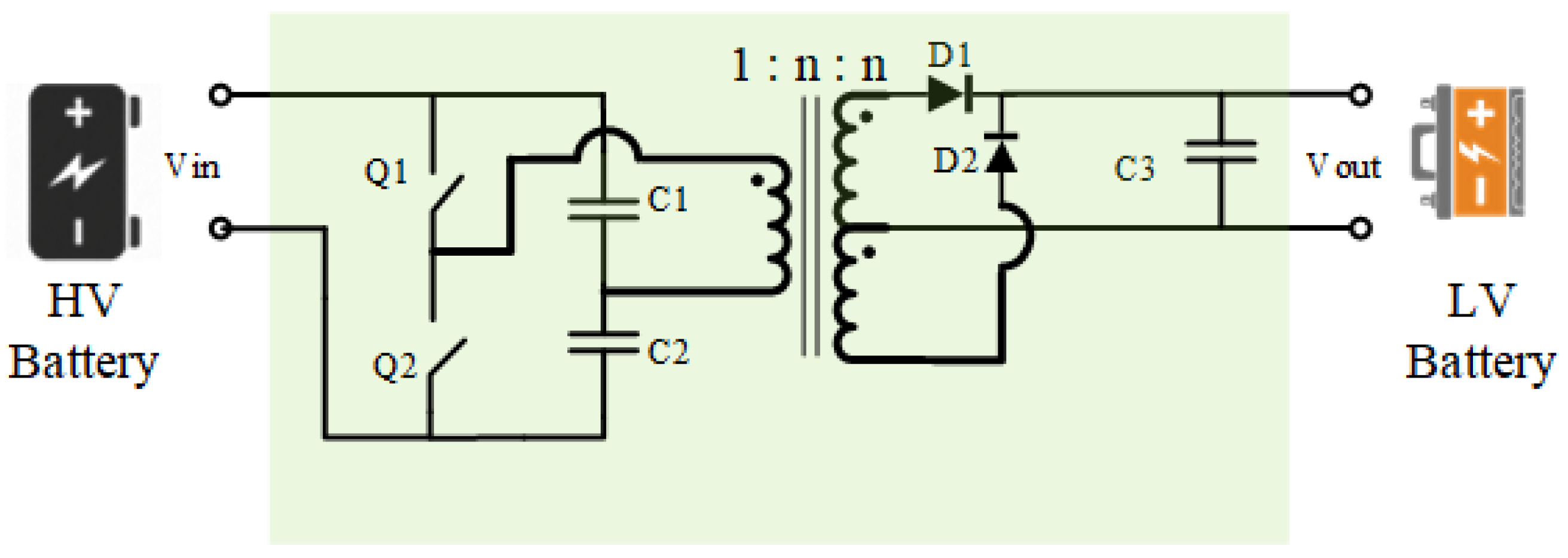
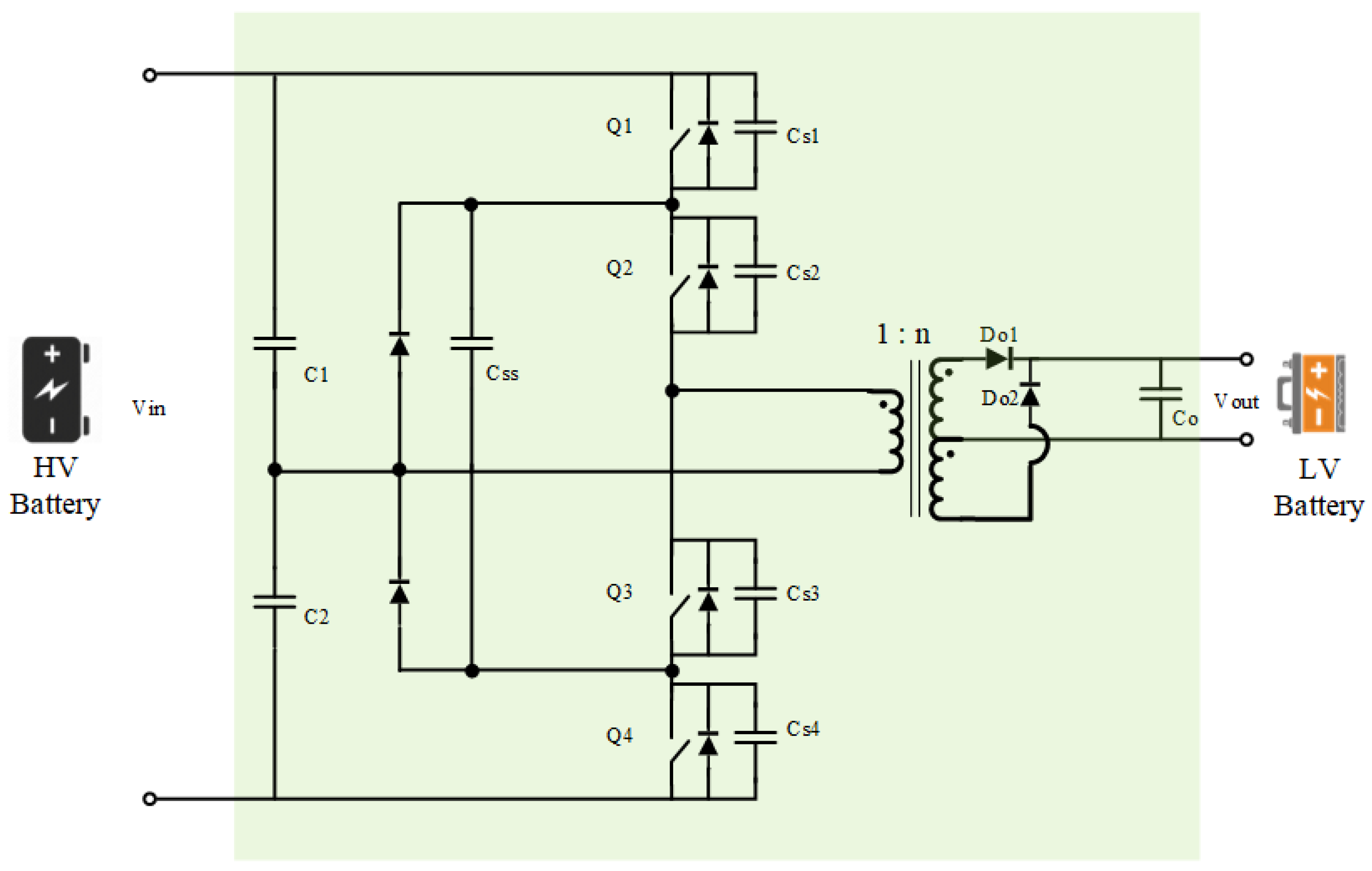
3.1.4. Half-Bridge Converter
3.1.5. Full-Bridge Converter
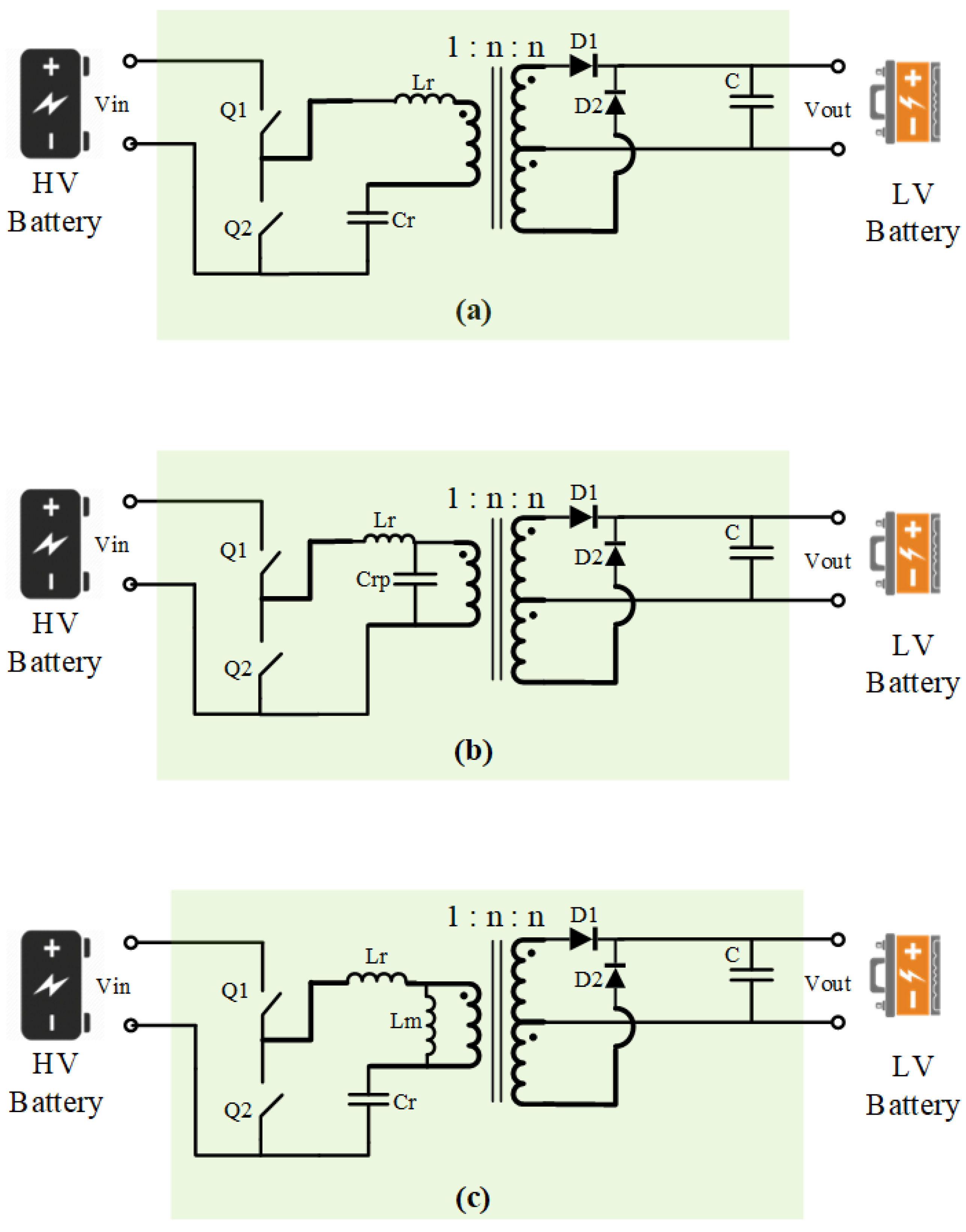
3.1.6. Resonant Converters
3.2. Bidirectional HV-LV Isolated Power Converters
3.2.1. Dual Half-Bridge (DHB) Converter
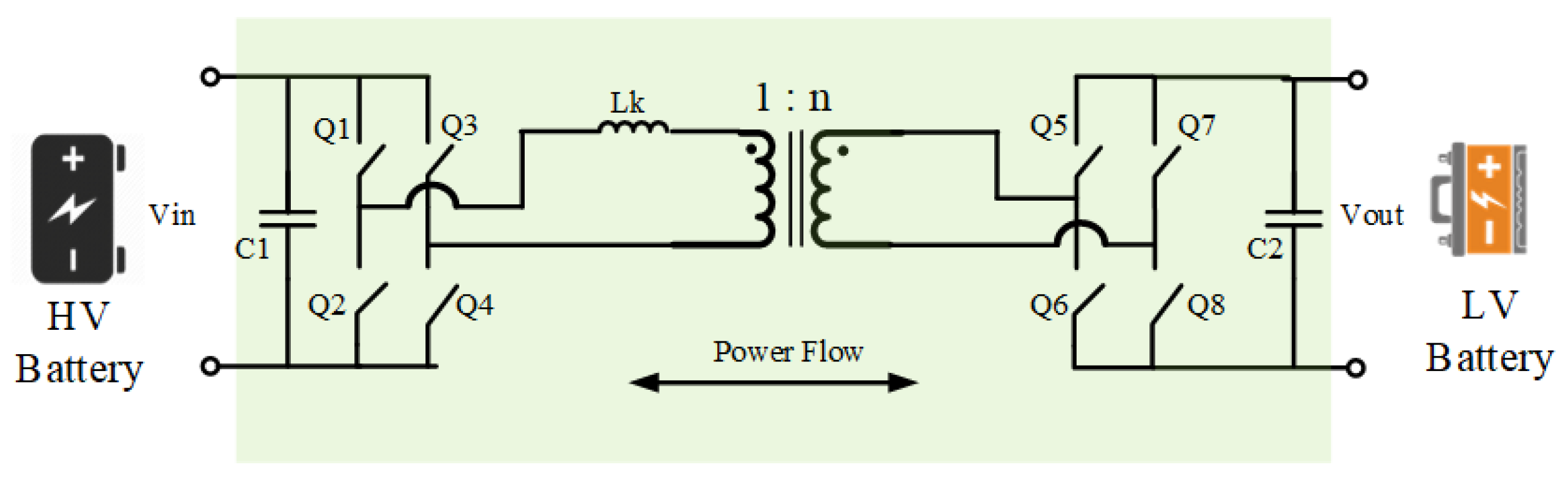
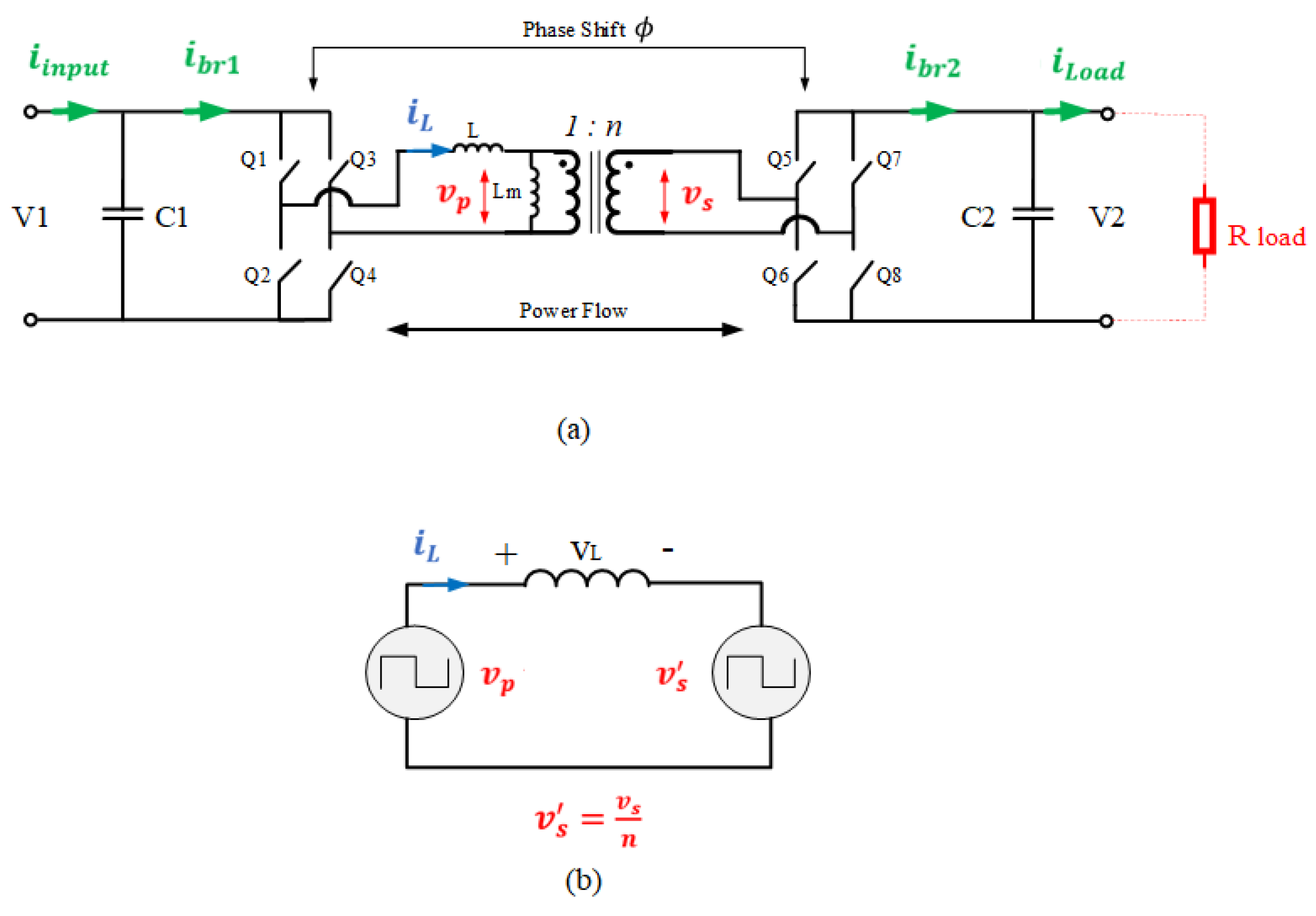
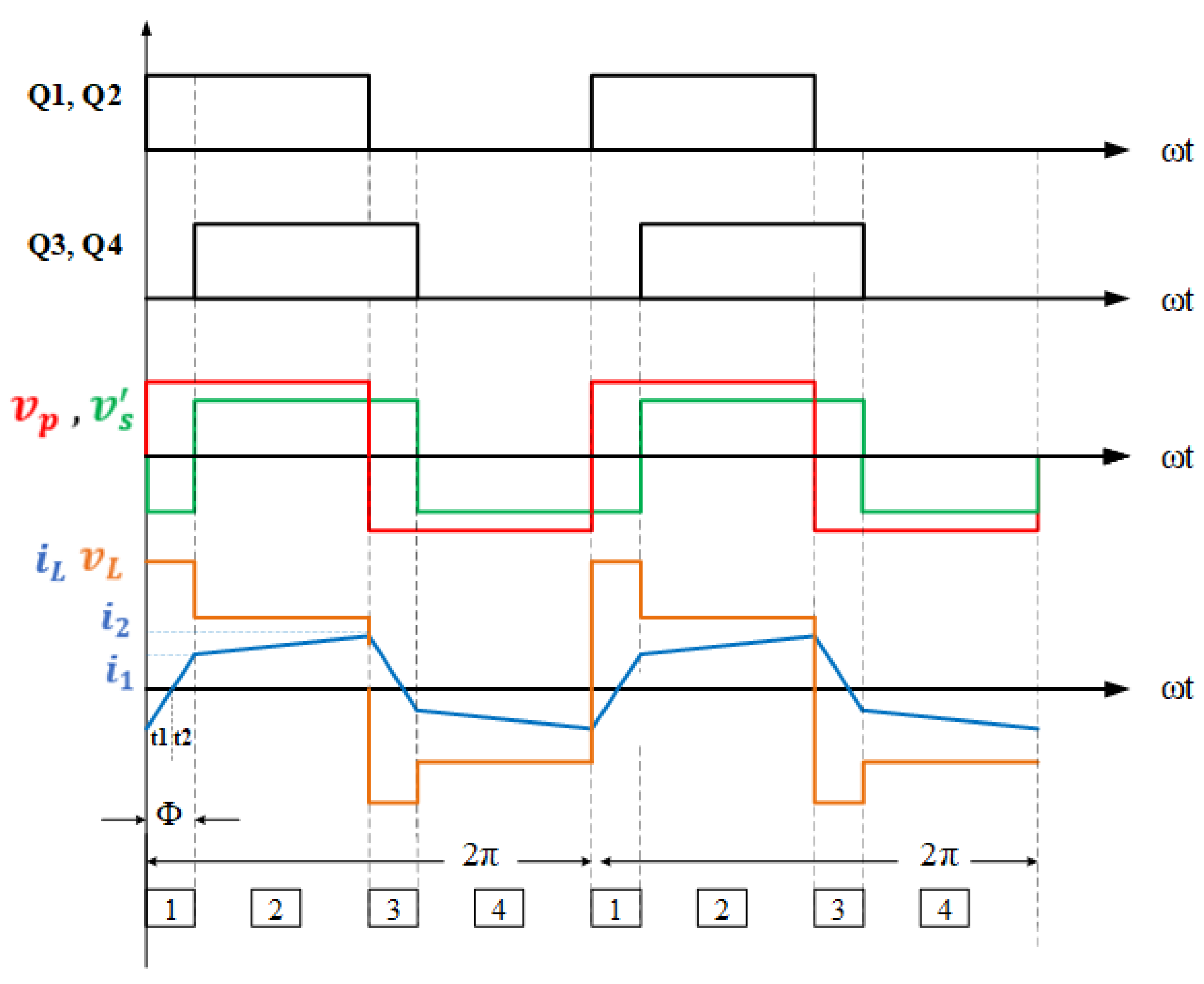
3.2.2. Dual Active Bridge (DAB) Converter
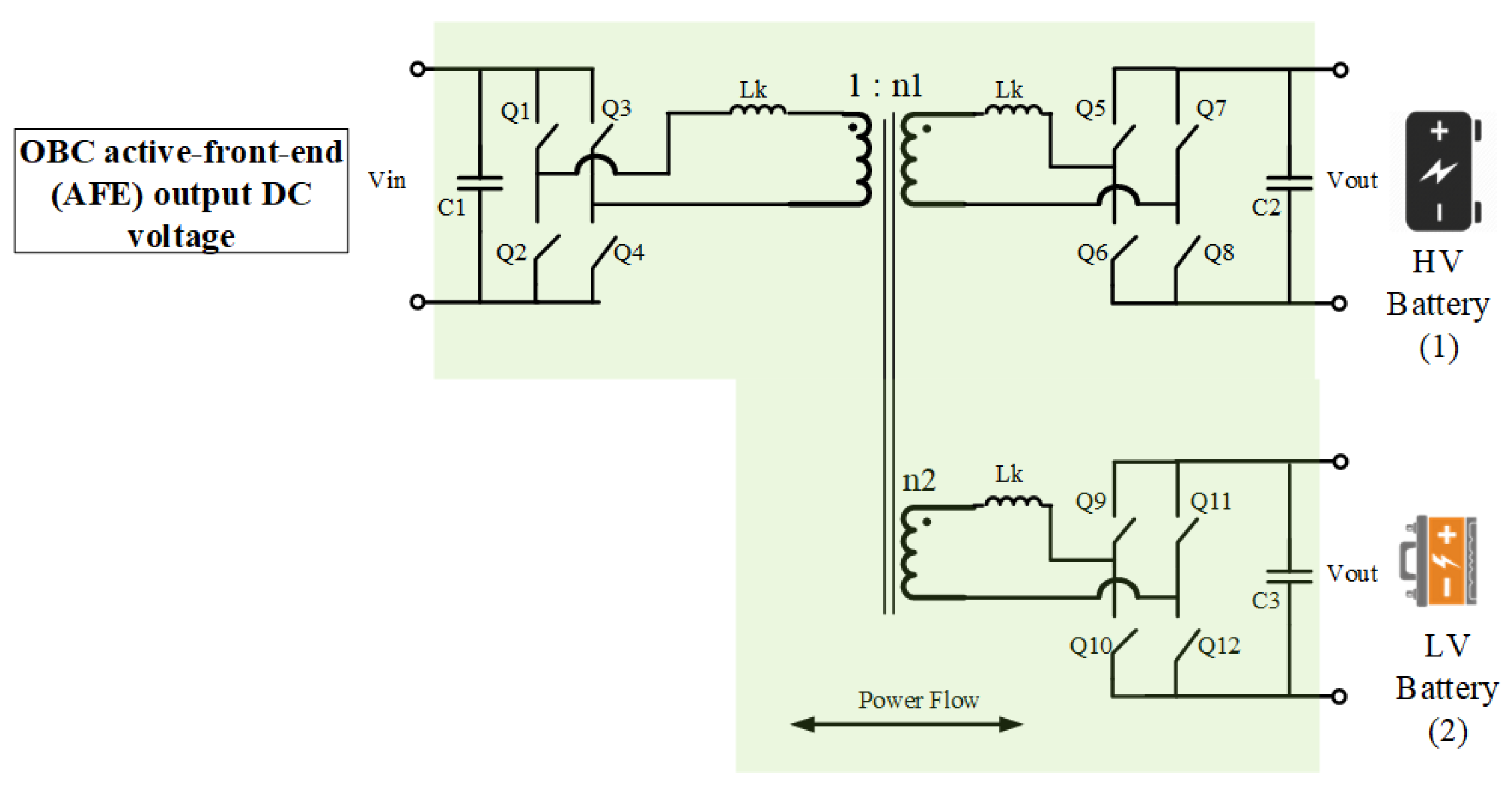
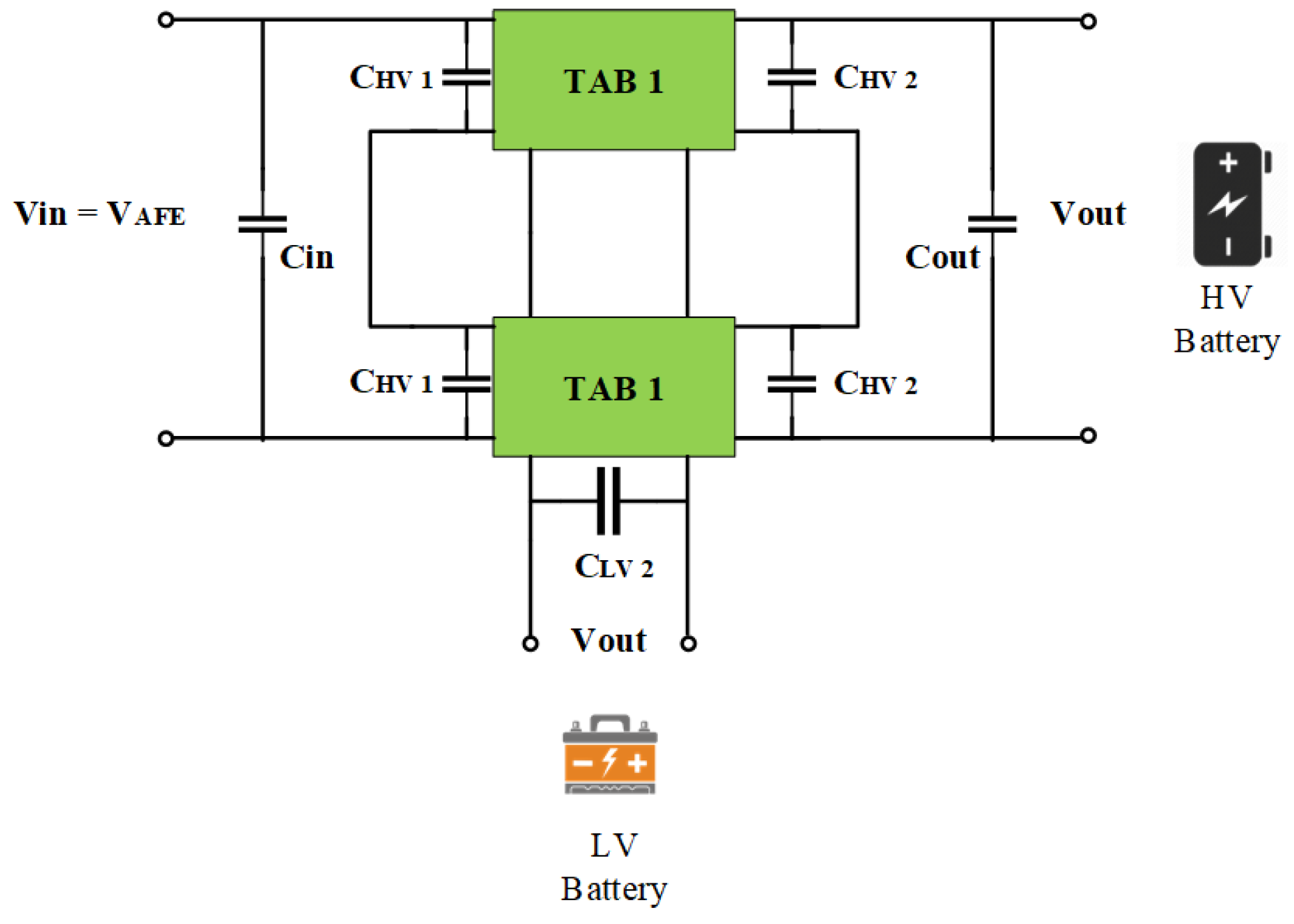
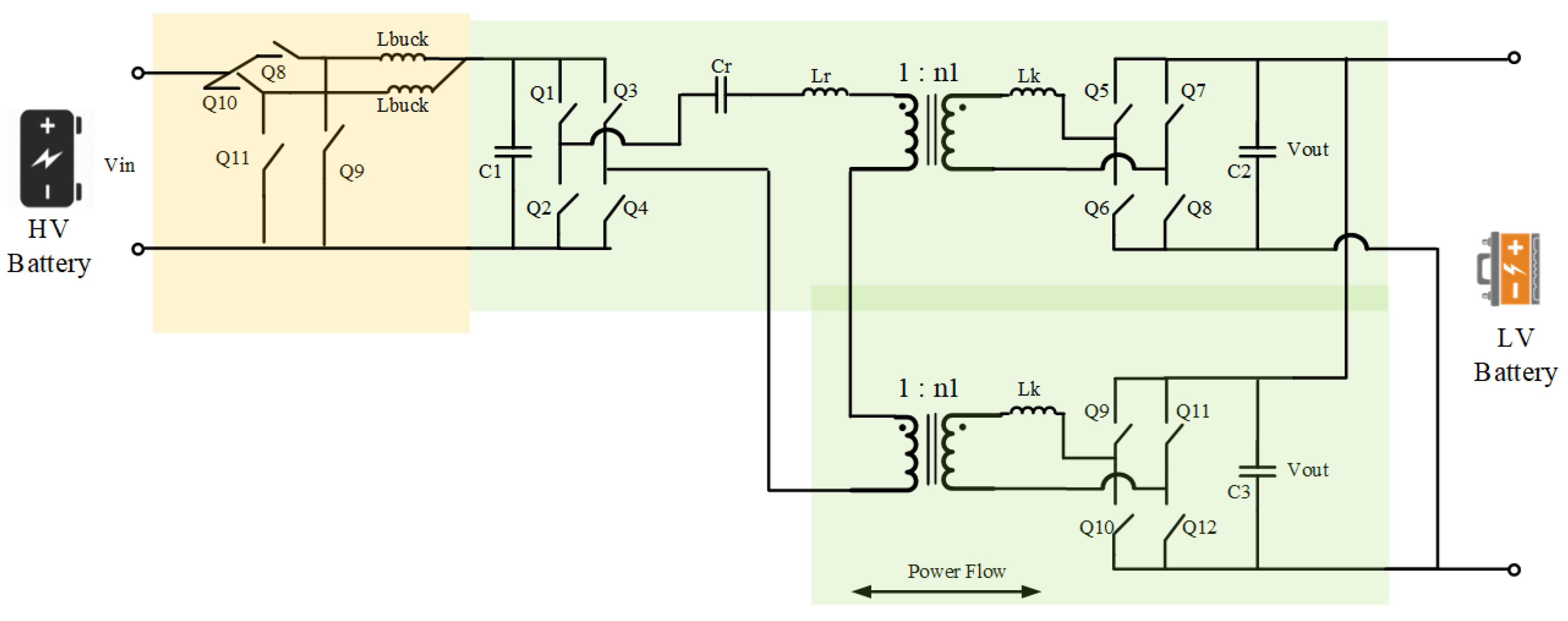
3.2.3. Triple Active Bridge (TAB) Converter
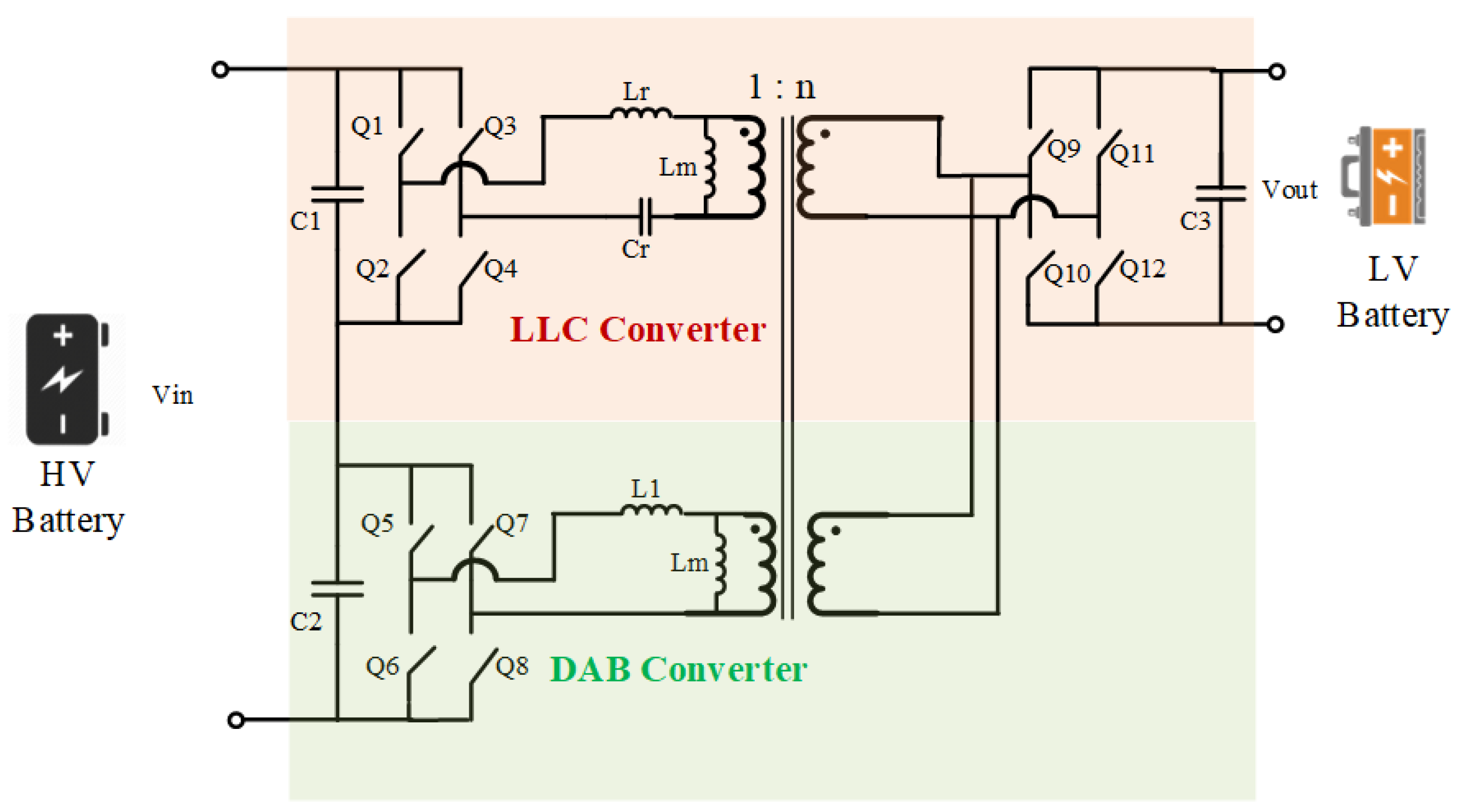
3.2.4. Bidirectional Resonant Converter
3.3. Summary of SotA APM Topologies Review
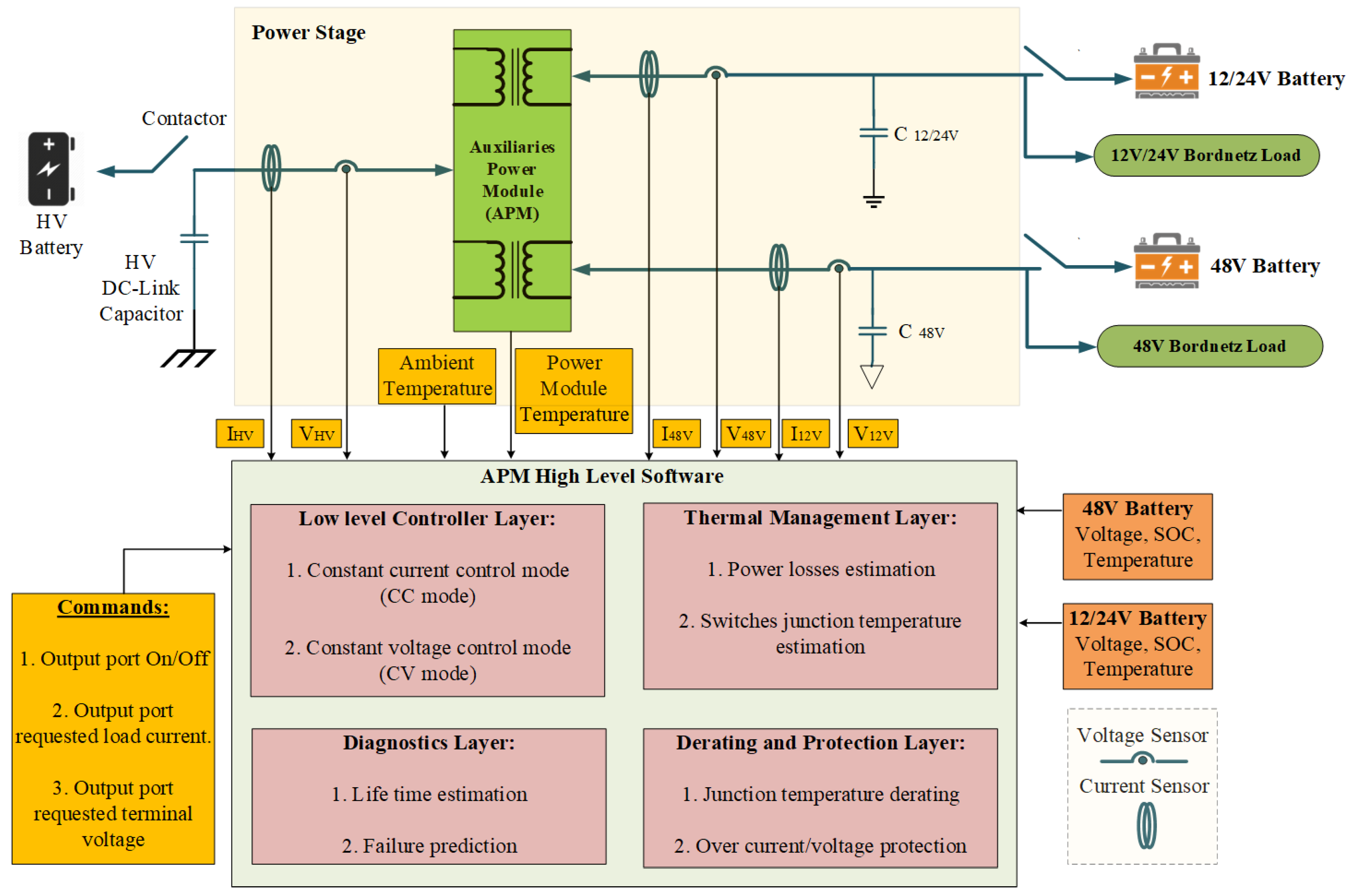
4. Control Techniques of an APM
- Junction temperature derating: In cases where the estimated junction temperature exceeds the defined limit by the semiconductor manufacturers [107].
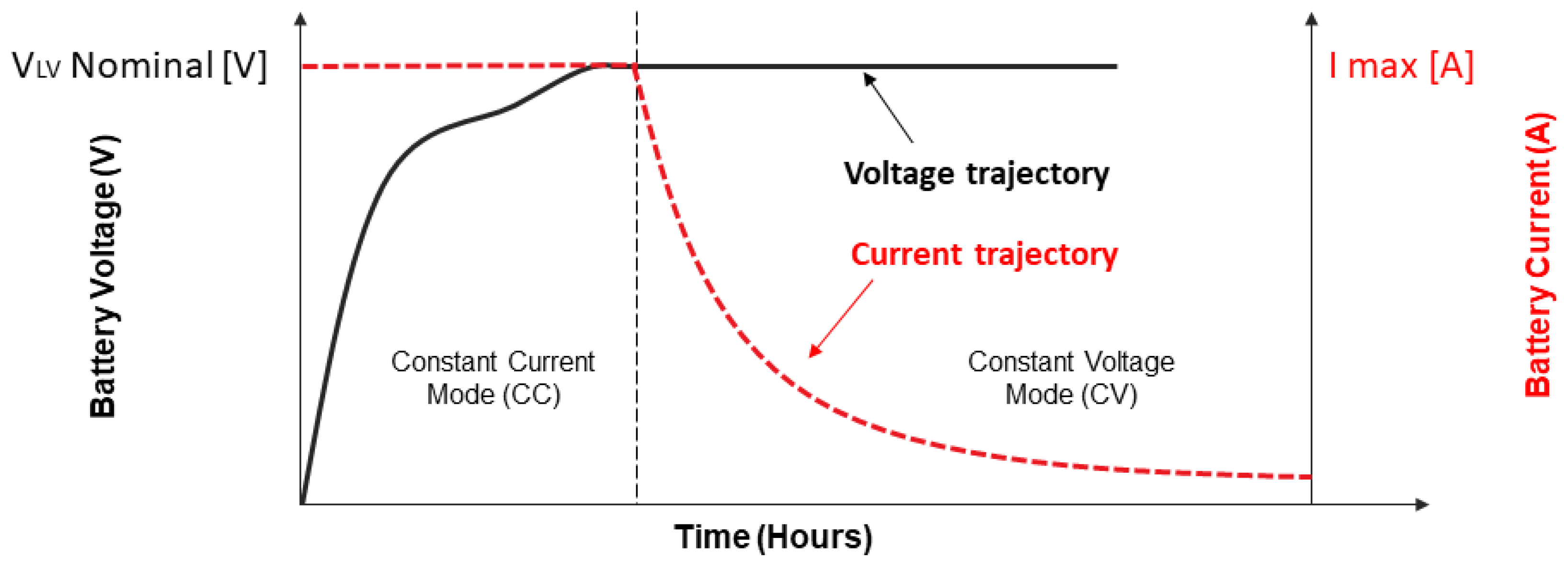
4.1. Control Modes of an APM
4.2. DAB Converter Modeling Methods
4.2.1. Reduced-Order Model
4.2.2. Continuous-Time Full-Order Model
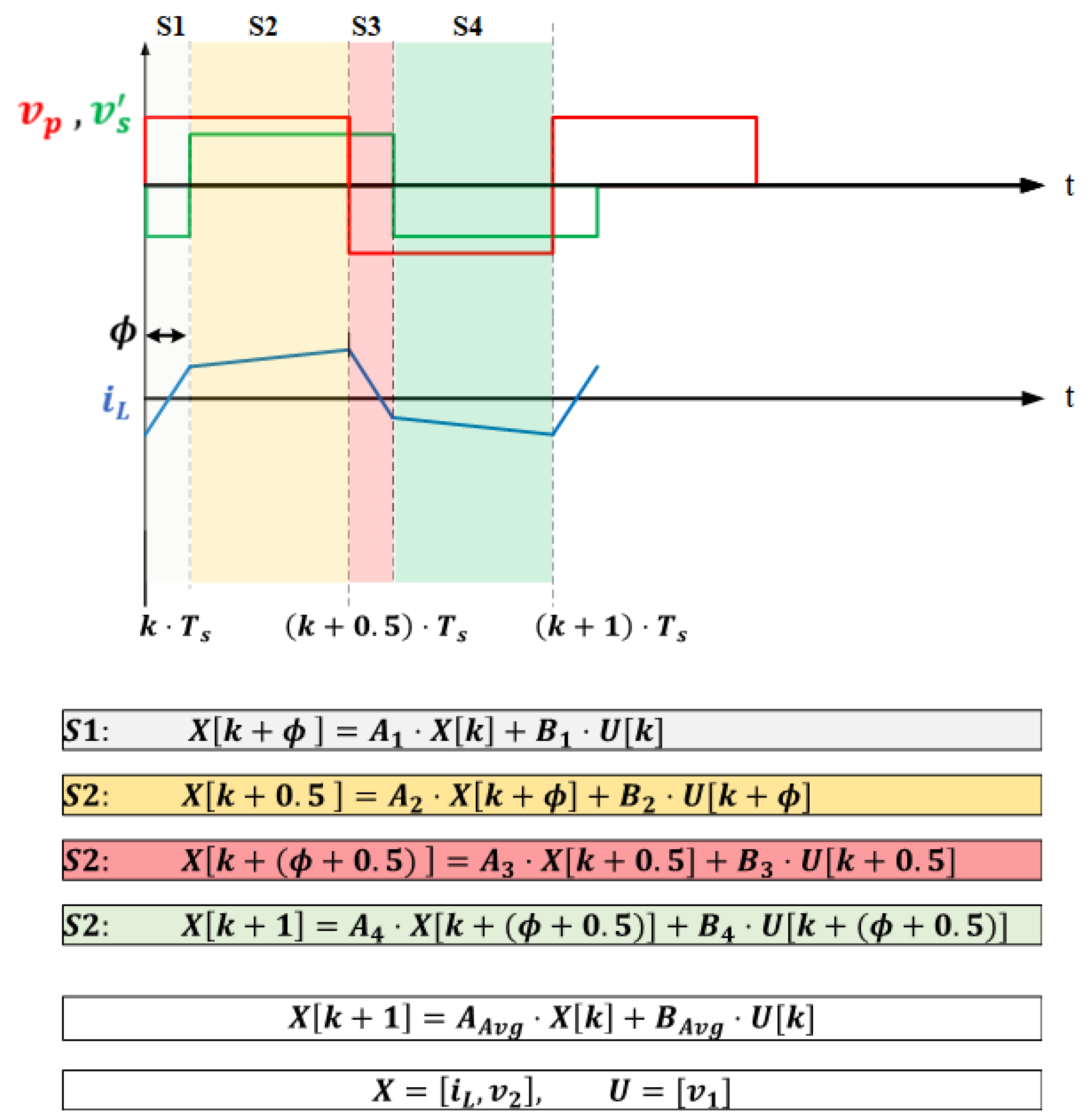
4.2.3. Discrete-Time Full-Order Model
4.3. DAB Converter Control Techniques
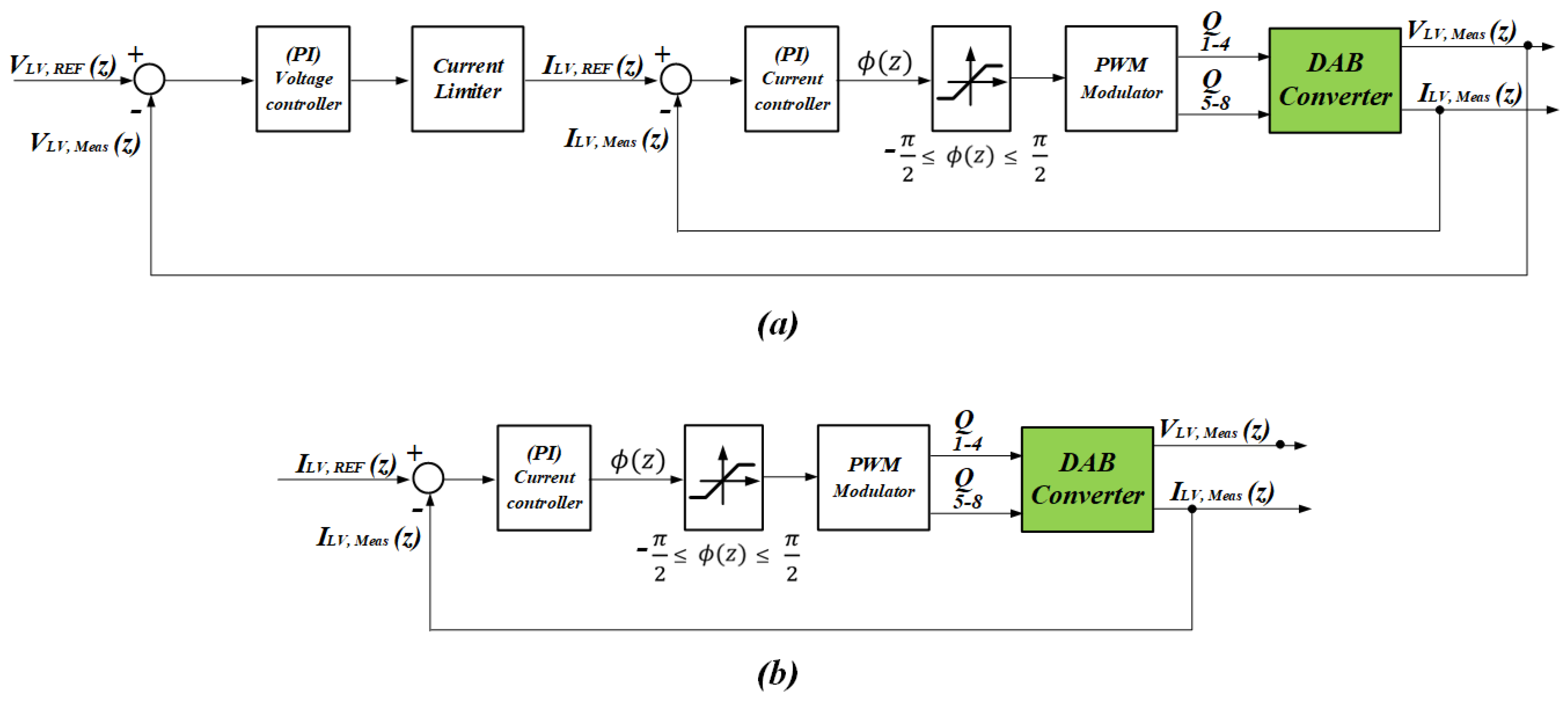
4.3.1. Feedback Control
4.3.2. Feedforward Plus Feedback Control
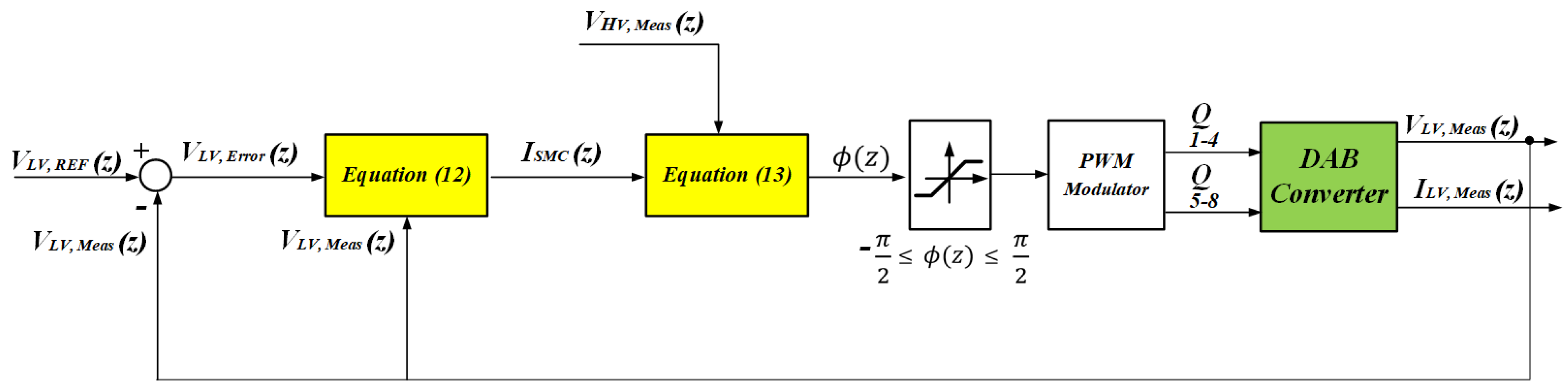
4.3.3. Sliding Mode Control
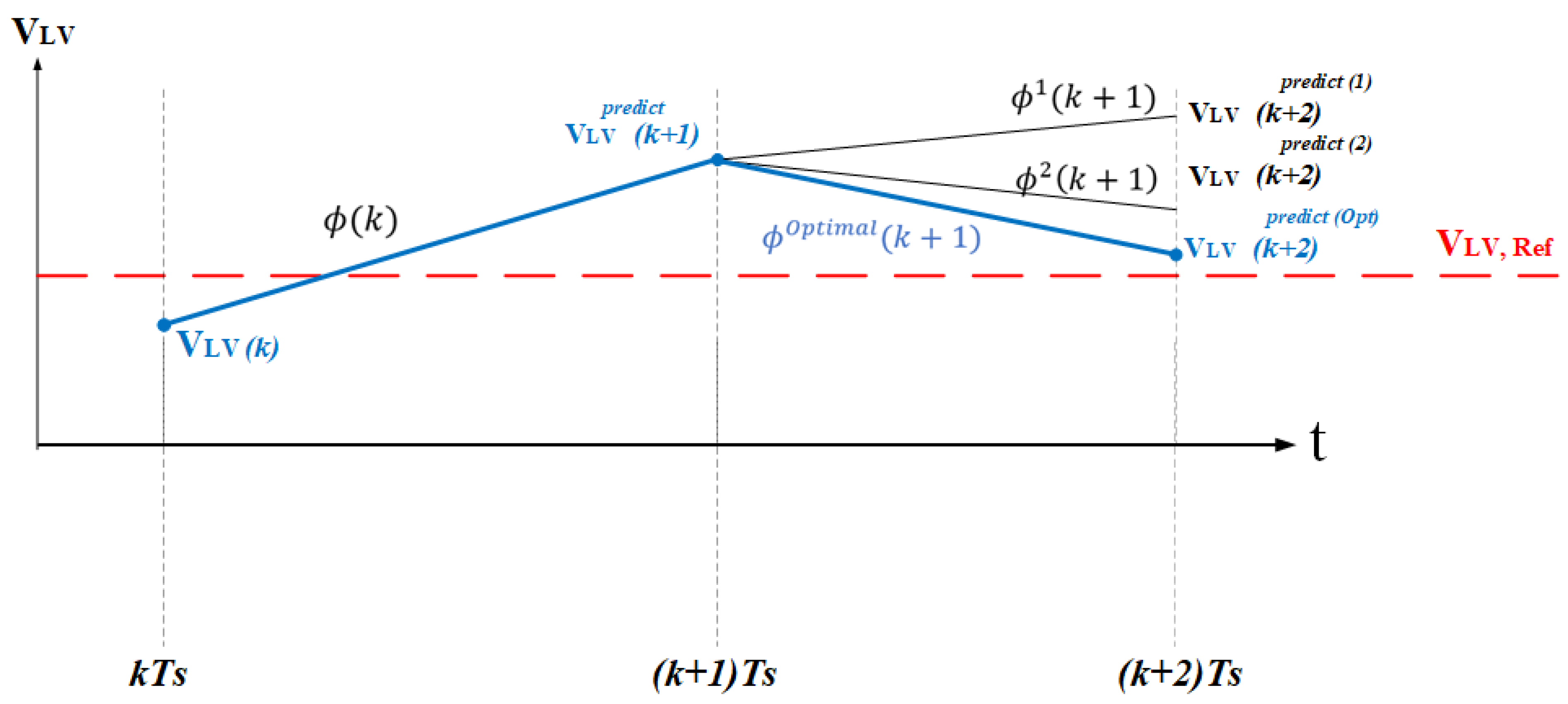
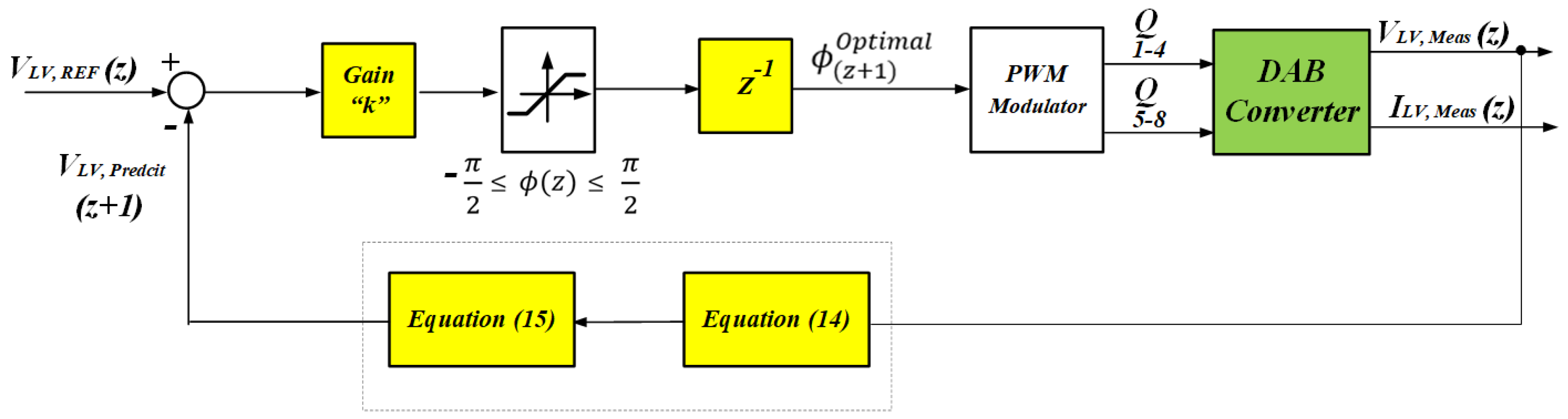
4.3.4. Model-Based Predictive Control
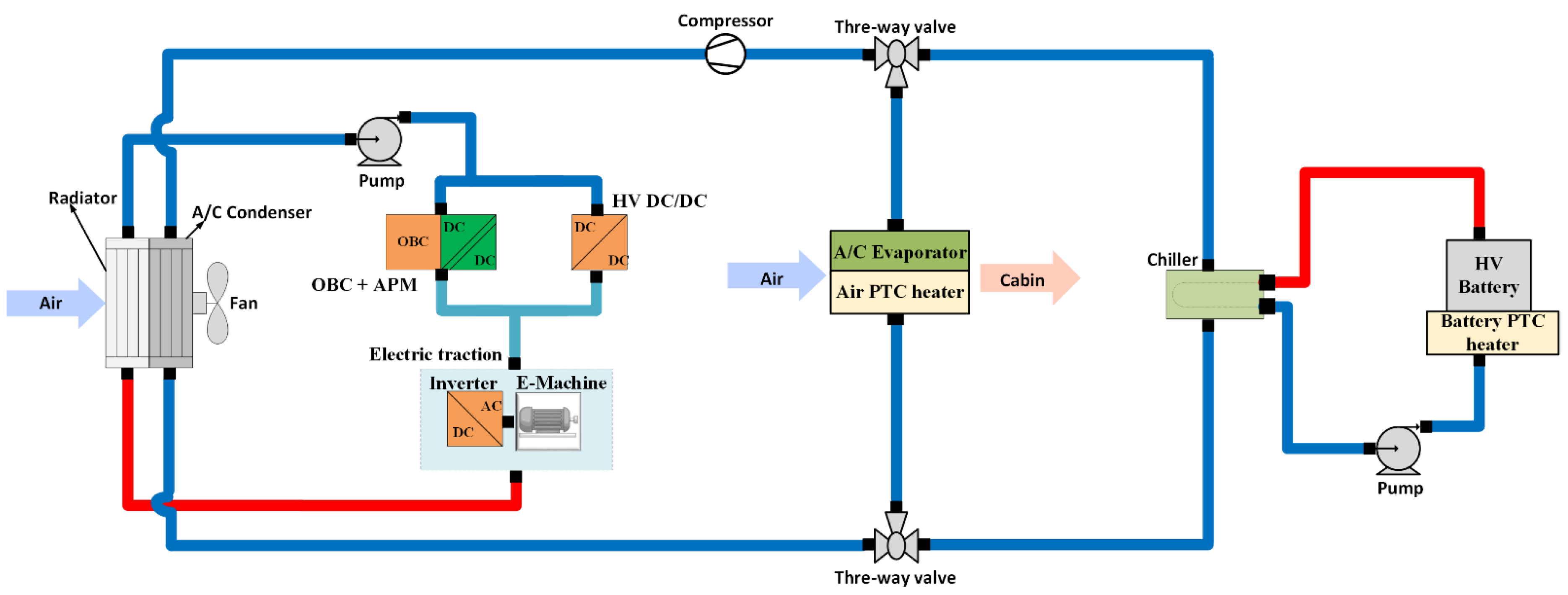
5. Cooling Circuit of Automotive DC-DC Converters
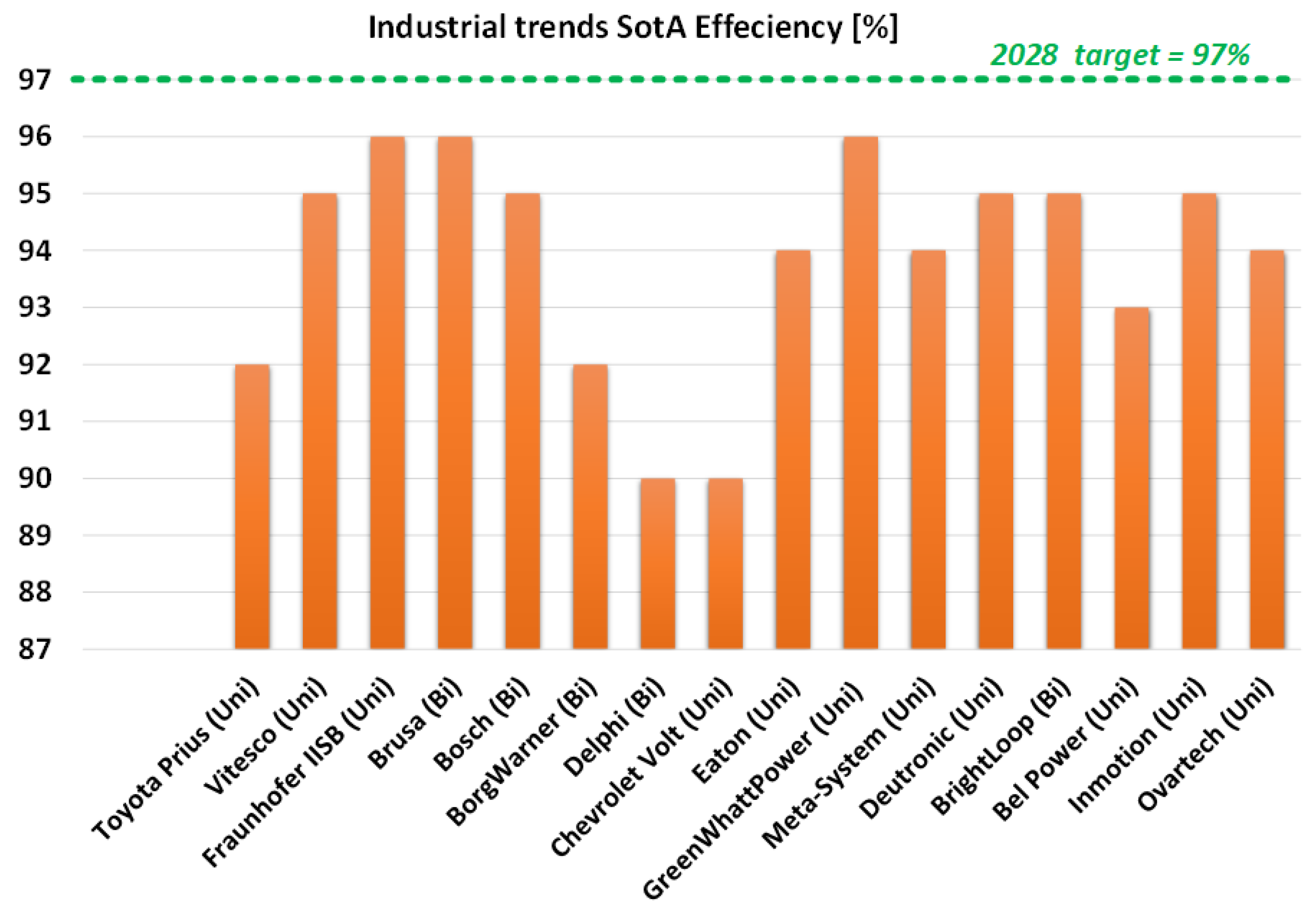
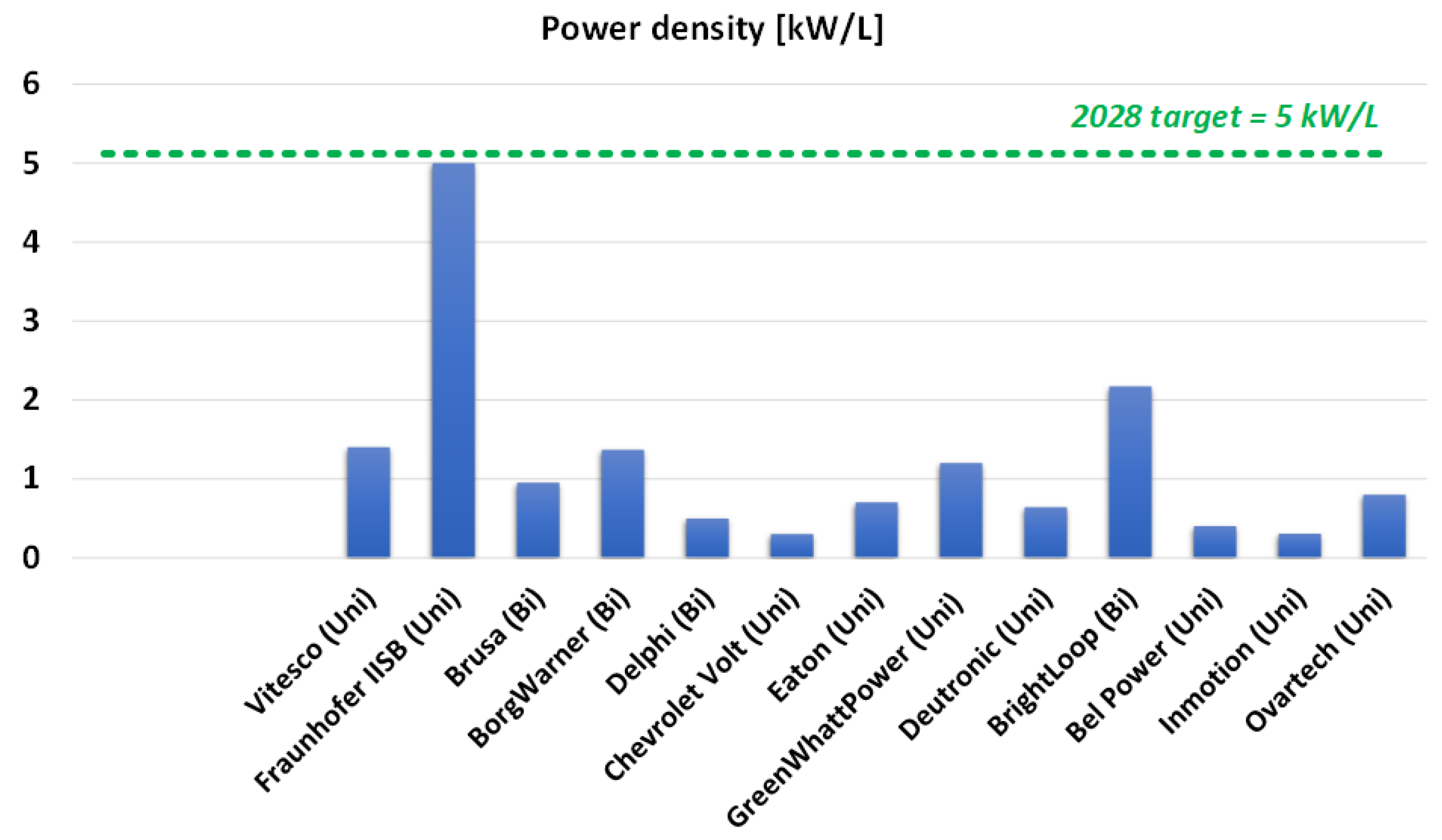
6. APM Industrial Trends
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Global growth of the electric vehicle market. Bloomberg New Energy Finance, 9 August 2021.
- Ghosh, A. Possibilities and challenges for the inclusion of the electric vehicle (EV) to reduce the carbon footprint in the transport sector: A review. Energies 2020, 13, 2602. [Google Scholar] [CrossRef]
- López, I.; Ibarra, E.; Matallana, A.; Andreu, J.; Kortabarria, I. Next generation electric drives for HEV/EV propulsion systems: Technology, trends and challenges. Renew. Sustain. Energy Rev. 2019, 114, 109336. [Google Scholar] [CrossRef]
- Monteiro, V.; Afonso, J.A.; Ferreira, J.C.; Afonso, J.L. Vehicle electrification: New challenges and opportunities for smart grids. Energies 2019, 12, 118. [Google Scholar] [CrossRef]
- Patel, N.; Kumar Bhoi, A.; Padmanaban, S.; Holm-Nielsen, J.-B. Green Energy and Technology Electric Vehicles Modern Technologies and Trends. Available online: http://www.springer.com/series/8059 (accessed on 1 July 2022).
- Byrne, D. An engineer’s guide to the DC power train architecture of an electric vehicle. In The Specialist in Electronic Component Distribution; TTI, Inc.: Maisach-Gernlinden, Germany, 2017. [Google Scholar]
- VARTA. The Role of 12 Volt Batteries in Electric Vehicles. 22 January 2021. Available online: https://batteryworld.varta-automotive.com/en-be/12-volt-batteries-in-electric-vehicles (accessed on 31 October 2022).
- Chen, Y.; Liu, W.; Yurek, A.; Zhou, X.; Sheng, B.; Liu, Y.F. Design and Optimization of a High Power Density Low Voltage DC-DC Converter for Electric Vehicles. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 1244–1251. [Google Scholar] [CrossRef]
- Repecho, V.; Olm, J.M.; Grino, R.; Doria-Cerezo, A.; Fossas, E. Modelling and Nonlinear Control of a Magnetically Coupled Multiport DC-DC Converter for Automotive Applications. IEEE Access 2021, 9, 63345–63355. [Google Scholar] [CrossRef]
- Institute of Electrical and Electronics Engineers. Towards a Viable Autonomous Driving Research Platform. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium, IV 2013, Gold Coast City, Australia, 23–26 June 2013. [Google Scholar]
- Elprocus. Power Electronics Application in Automotive Electronics. 2013. Available online: https://www.elprocus.com/power-electronics-in-automotive-applications/ (accessed on 3 January 2023).
- Buechel, M.; Frtunikj, J.; Becker, K.; Sommer, S.; Buckl, C.; Armbruster, M.; Marek, A.; Zirkler, A.; Klein, C.; Knoll, A. An Automated Electric Vehicle Prototype Showing New Trends in Automotive Architectures. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Gran Canaria, Spain, 15–18 October 2015; pp. 1274–1279. [Google Scholar] [CrossRef]
- Hasan, S.N.; Anwar, M.N.; Teimorzadeh, M.; Tasky, D.P. Features and challenges for Auxiliary Power Module (APM) design for hybrid/electric vehicle applications. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Yu, G.; Choi, S. Auxiliary Power Module—Integrated EV Charger with Extended ZVS range. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 628–632. [Google Scholar] [CrossRef]
- Millan, J.; Godignon, P.; Perpina, X.; Perez-Tomas, A.; Rebollo, J. A survey of wide bandgap power semiconductor devices. IEEE Trans. Power Electron. 2014, 29, 2155–2163. [Google Scholar] [CrossRef]
- Ye, M.; Xu, P.; Yang, B.; Lee, F. Investigation of topology candidates for 48V VRM. In Proceedings of the Conference Proceedings—IEEE Applied Power Electronics Conference and Exposition—APEC, Dallas, TX, USA, 10–14 March 2002; Volume 2, pp. 699–705. [Google Scholar] [CrossRef]
- Faunhofer. Isolated High Voltage DC-DC Converters for Auxiliary Power Supply in Electric Vehicles. Erlangen. Available online: www.iisb.fraunhofer.de (accessed on 3 June 2022).
- Zhu, L.; Bai, H.; Brown, A.; McAmmond, M. Design a 400 V-12 v 6 kW Bidirectional Auxiliary Power Module for Electric or Autonomous Vehicles with Fast Precharge Dynamics and Zero DC-Bias Current. IEEE Trans Power Electron. 2021, 36, 5323–5335. [Google Scholar] [CrossRef]
- Brusa Company. BSC66-Bidirectional Auxiliary Supply Converter. Available online: www.brusa.biz (accessed on 5 June 2022).
- Kieu, H.P.; Lee, D.; Choi, S.; Kim, S. A 700 kHz 800V/14V GaN-based DC-DC Converter with Optimized Integrated Transformer for Electrical Vehicles. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition, ECCE, Vancouver, BC, Canada, 10–14 October 2021; pp. 5549–5553. [Google Scholar] [CrossRef]
- Institute of Electrical and Electronics Engineers. In Proceedings of the 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 6–10 September 2021.
- Foray, E. Design of an Integrated High-Voltage Low-Power Isolated DC/DC Converter for Automotive Applications—Conception d’un Convertisseur DC/DC Isolé, Intégré, Haute-Tension et Basse-Puissance Pour Applications Automobiles. Available online: http://theses.insa-lyon.fr/publication/2021LYSEI043/these.pdf (accessed on 8 July 2022).
- ISO 6469-3:2018; Electrically Propelled Road Vehicles—Safety Specifications—Part 3: Electrical Safety. ISO: Geneva, Switzerland, 2018.
- Silicon Labs. Quick Reference Guide Isolation in Electric Vehicle Systems. 2021. Available online: https://www.silabs.com/products/isolation/automotive-isolation (accessed on 10 December 2022).
- Institute of Electrical and Electronics Engineers. Tenn. Electrical Manufacturing Expo. In Proceedings of the Electrical Insulation Conference and Electrical Manufacturing & Coil Winding Conference, Nashville, TN, USA, 22–24 October 2007. [Google Scholar]
- Geramirad, H.; Morel, F.; Dworakowski, P.; Lefebvre, B.; Lagier, T.; Camail, P.; Vollaire, C.; Bréard, A. Conducted EMI Reduction in a 100kW 1.2kV Dual Active Bridge Converter. 2020. Available online: https://hal.archives-ouvertes.fr/hal-02942284v2 (accessed on 14 November 2022).
- Deutronic Company. DC-DC Converter. Available online: https://www.deutronic.com/wp-content/uploads/2021/01/DVCH3000_ds.pdf (accessed on 23 August 2022).
- WKS Informatik Solutions. LV 124/LV 148 Standard Tests. Available online: https://www.wks-informatik.de/wp-content/uploads/DocumentDownloads/June2017/LV124_LV148_WKSInformatikSolutions.pdf (accessed on 18 August 2022).
- A. N. Introduction. EMC Testing on Electric Vehicles. 2020. Available online: https://www.ametek-cts.com/know-how/electric-vehicles-emc-testing (accessed on 4 October 2022).
- Everts, J. Design and optimization of an efficient (96.1%) and compact (2 kW/dm3) bidirectional isolated single-phase dual active bridge AC-DC converter. Energies 2016, 9, 799. [Google Scholar] [CrossRef]
- Solomon, A. How to Implement Automated Tests for the Electrical Tests of the LV 124 and LV 148 Automotive Standards. WKS Informatik GmbH. Available online: www.wks-informatik.de (accessed on 10 December 2018).
- Veeramanikandan, M.; Vavilapalli, K.R.; Jeevan, N.K. HiL Testing of Automotive Transients in Electric Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Haspl, A.; Leighton, M. Winkler. Reduction of Testing Time of PTCE/HTOE Tests Based on Real Road Load Profiles; 2022-01-0176; SAE International: Warrendale, PN, USA, 2022. [Google Scholar]
- Jain, A.G.D. Power Analog Design Journal Automotive EMC-Compliant Reverse-Battery Protection with Ideal-Diode Controllers. 2020. Available online: https://www.ti.com/lit/an/slyt802/slyt802.pdf?ts=1675712117315&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 3 December 2022).
- ZVEI-Task Force Voltage Classes. Voltage Classes for Electric Mobility. Frankfurt, Decembar 2013. Available online: https://www.zvei.org/fileadmin/user_upload/Presse_und_Medien/Publikationen/2014/april/Voltage_Classes_for_Electric_Mobility/Voltage_Classes_for_Electric_Mobility.pdf (accessed on 29 May 2022).
- Parikh, P.; Smith, K.; Barr, R.; Shono, K.; McKay, J.; Shen, L.; Lal, R.; Chowdhury, S.; Yea, S.; Smith, R.P.; et al. 650 volt GaN commercialization reaches automotive standards. ECS Trans. 2017, 80, 17. [Google Scholar] [CrossRef]
- Green, R.; Lelis, A.; Habersat, D. Application of reliability test standards to SiC Power MOSFETs. In Proceedings of the 2011 International Reliability Physics Symposium, Monterey, CA, USA, 10–14 April 2011; p. EX-2. [Google Scholar]
- Lee, S. Test Standard for Reliability of Automotive Semiconductors: AEC-Q100. J. IKEEE 2021, 25, 578–583. [Google Scholar]
- Jain, H.; Rajawat, S.; Agrawal, P. Comparision of wide band gap semiconductors for power electronics applications. In Proceedings of the 2008 International Conference on Recent Advances in Microwave Theory and Applications, Jaipur, India, 21–24 November 2008; pp. 878–881. [Google Scholar]
- Morya, A.; Moosavi, M.; Gardner, M.; Toliyat, H. Applications of Wide Bandgap (WBG) devices in AC electric drives: A technology status review. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–8. [Google Scholar]
- Chen, R.; Wang, F.F. SiC and GaN devices with cryogenic cooling. IEEE Open J. Power Electron. 2021, 2, 315–326. [Google Scholar] [CrossRef]
- Zhang, Y.; Singh, J. Charge control and mobility studies for an AlGaN/GaN high electron mobility transistor. J. Appl. Phys. 1999, 85, 587–594. [Google Scholar] [CrossRef]
- Meneghesso, G.; Verzellesi, G.; Danesin, F.; Rampazzo, F.; Zanon, F.; Tazzoli, A.; Meneghini, M.; Zanoni, E. Reliability of GaN high-electron-mobility transistors: State of the art and perspectives. IEEE Trans. Device Mater. Reliab. 2008, 8, 332–343. [Google Scholar] [CrossRef]
- Boteler, L.; Lelis, A.; Berman, M.; Fish, M. Thermal conductivity of power semiconductors—When does it matter? In Proceedings of the 2019 IEEE 7th Workshop on Wide Bandgap Power Devices and Applications (WiPDA), Raleigh, NC, USA, 29–31 October 2019; pp. 265–271. [Google Scholar]
- Liu, G.; Bai, K.H.; McAmmond, M.; Brown, A.; Johnson, P.M.; Taylor, A.; Lu, J. Comparison of SiC MOSFET-based and GaN HEMT-based high-efficiency high-power-density 7.2 kW EV battery chargers. IET Power Electron. 2018, 11, 1849–1857. [Google Scholar]
- Zhaksylyk, A. Implementation of a Phase Shifted Full bridge DC-DC ZVS Converter with Peak Current Mode Control. Ph.D. Thesis, Vrije Universiteit Brussel, Brussels, Belgium, 2019. [Google Scholar]
- Rashid, M.H.; Hui, S.Y.; Shu-Hung Chung, H. Resonant and soft-switching converters. In Power Electronics Handbook; Elsevier: Amsterdam, The Netherlands, 2018; pp. 339–383. [Google Scholar] [CrossRef]
- Texas Instruments. Phase Shifted Full Bridge, Zero Voltage Transition Design Considerations; Texas Instruments: Dallas, TX, USA, 2011. [Google Scholar]
- Ashique, R.H.; Salam, Z.; Maruf, M.H.; Shihavuddin, A.; Islam, M.T.; Rahman, M.F.; Kotsampopoulos, P.; Fayek, H.H. A Comparative Analysis of Soft Switching Techniques in Reducing the Energy Loss and Improving the Soft Switching Range in Power Converters. Electronics 2022, 11, 1062. [Google Scholar] [CrossRef]
- Kolar, J.W.; Drofenik, U.; Biela, J.; Heldwein, M.L.; Ertl, H.; Friedli, T.; Round, S.D. PWM Converter Power Density Barriers. In Proceedings of the 2007 Power Conversion Conference—Nagoya, Nagoya, Japan, 2–5 April 2007. [Google Scholar]
- Kirlin, R.; Bech, M.; Trzynadlowski, A. Analysis of power and power spectral density in PWM inverters with randomized switching frequency. IEEE Trans. Ind. Electron. 2002, 49, 486–499. [Google Scholar] [CrossRef]
- Glaser, J.S.; Nasadoski, J.; Heinrich, R. A 900W, 300V to 50V Dc-dc power converter with a 30MHz switching frequency. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition—APEC, Washington, DC, USA, 15–19 February 2009; pp. 1121–1128. [Google Scholar] [CrossRef]
- Meta System. High Voltage DC-DC Converter. Available online: https://www.metasystem.it/en/e-mobility (accessed on 23 August 2022).
- Elton Company. High-Voltage DC/DC Converters for Electric Vehicles. Available online: https://www.eaton.com/content/dam/eaton/products/emobility/power-electronics/dc-dc-converters/eaton-dcdc-converter-data-sheet-brochure-emob0008-en-us.pdf (accessed on 23 August 2022).
- Daneshpajooh, H.; Bakhshai, A.; Jain, P. Optimizing Dual Half Bridge Converter for Full Range Soft Switching and High Efficiency. In Proceedings of the IEEE Energy Conversion Congress and Exposition: Energy Conversion Innovation for a Clean Energy Future, ECCE 2011, Phoenix, AZ, USA, 17–22 September 2011; pp. 1296–1301. [Google Scholar] [CrossRef]
- Texas Insturments. BI-Directional, Dual Active Bridge Reference Design for Level 3 Electric Vehicle Charging Station; Texas Instruments: Dallas, TX, USA, 2019. [Google Scholar]
- Mukherjee, S.; Kumar, A.; Chakraborty, S. Comparison of DAB and LLC DC-DC Converters in High-Step-Down Fixed-Conversion-Ratio (DCX) Applications. IEEE Trans. Power Electron. 2021, 36, 4383–4398. [Google Scholar] [CrossRef]
- Schäfer, J.; Bortis, D.; Kolar, J.; Schäfer, J.; Bortis, D. Multi-Port Multi-Cell DC/DC Converter Topology for Electric Vehicle’s Power Distribution Networks. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017. [Google Scholar] [CrossRef]
- Delphi Company. Delphi Universal 2.2kW DC-DC Converter. Available online: https://www.elmofo.com.au/delphi-universal-2-2kw-dc-dc-converter.html?__cf_chl_jschl_tk__=129263ca3944ae17550d92ae839add7065273ac1-1624956228-0-AYUeKuScL0CvAOGtNx3yc7_Y_OuTfQNOP69Rf2ixt_jJmjbL0iZkCYBGBZOPXsoN-4MXRCyOZ92oifIX0C5Bwf3lpnWDIX0xrYesriwpVC48gctzzfQF-Rv_66xaAoSAnodd99SNxdzBeGzODzmVult6EEJZYbRPWOhR_v4zRc_TsErfGDQUGN_WeWSliE1LWAOF5KCYE1ybyN1hLu7bd69PLFrFVWTBKjvsv9w0krKsbbuqmpGfgb4qOoaotIwNyG3r-kfEnz_AMgu_eHsQ8eTW8YlKcoTsdckku_SlNCQnxfFkD6YBzQ2We5IWuU4GBLSX3I5Wvl4f6aYNt40Qcd0L_cSkCnsmfR0NJOWg4NYrbNsANbBX4yYDKswG11IQBzc_oZbRuaKyQfF3LMRsjTpQnf0VcnhmozSFRFayM-x0ox3GAsehlQvcNpy__QD-g1MgizVpBYiP9GfX1_23DutxJ0b7gFGRk1vDkhYENEVDKp-H5iCZkUofEQLX1jSCGmd4ijWAJSbm1OgZsgGxp10 (accessed on 23 August 2022).
- GaN Systems. Application Success with GaN Systems 9.6 kW EV DCDC Converter. 2022. Available online: https://gansystems.com/gan-applications/brightloop/ (accessed on 29 November 2022).
- VDD102S360-14 SPECIFICATIONS Item Specifications. Available online: www.ovartech.com (accessed on 3 October 2022).
- Tang, Y.; Lu, J.; Wu, B.; Zou, S.; Ding, W.; Khaligh, A. An Integrated Dual-Output Isolated Converter for Plug-in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 966–976. [Google Scholar] [CrossRef]
- Avila, A.; Garcia-Bediaga, A.; Alzuguren, I.; Vasic, M.; Rujas, A. A Modular Multifunction Power Converter Based on a Multiwinding Flyback Transformer for EV Application. IEEE Trans. Transp. Electrif. 2022, 8, 168–179. [Google Scholar] [CrossRef]
- Ling, Z.; Liang, T.; Yang, L.; Li, T. Design and implementation of interleaved quasi-resonant DC-DC flyback converter. In Proceedings of the International Conference on Power Electronics and Drive Systems, Taipei, Taiwan, 2–5 November 2009; pp. 429–433. [Google Scholar] [CrossRef]
- Zhang, F.; Yan, Y. Novel forward-flyback hybrid bidirectional DC-DC converter. IEEE Trans. Ind. Electron. 2009, 56, 1578–1584. [Google Scholar] [CrossRef]
- Hendra, A.; Hamada, F.; Yusivar, F.; Institute of Electrical and Electronics Engineers. Voltage control in push-pull DC-DC converter using state space averaging PID with soft-start for electric vehicle auxiliary system. In Proceedings of the International Conference on Instrumentation Control and Automation (ICA), Bandung, Indonesia, 31 July–2 August 2019. [Google Scholar]
- Sayed, K. Zero-voltage soft-switching DC-DC converterbased charger for LV battery in hybrid electric vehicles. IET Power Electron. 2019, 12, 3389–3396. [Google Scholar] [CrossRef]
- Duan, C.; Bai, H.; Guo, W.; Nie, Z. Design of a 2.5-kW 400/12-V High-Efficiency DC/DC Converter Using a Novel Synchronous Rectification Control for Electric Vehicles. IEEE Trans. Transp. Electrif. 2015, 1, 106–114. [Google Scholar] [CrossRef]
- Hou, R.; Emadi, A. Applied Integrated Active Filter Auxiliary Power Module for Electrified Vehicles with Single-Phase Onboard Chargers. IEEE Trans. Power Electron. 2017, 32, 1860–1871. [Google Scholar] [CrossRef]
- EPC Company. Boosting Power Density in 48 V to 5-12 V DC to DC Converter Using EPC2053, with up to 25 a Output; EPC Company: Sandpoint, ID, USA, 2018. [Google Scholar]
- EPC Company. APPLICATION BRIEF: AB016 eGaN® FETs and and ICs for Automotive DC-DC Applications eGaN® FETs and ICs for Automotive DC-DC Applications EFFICIENT POWER CONVERSION 48 V IN to 12 V OUT for Mild Hybrid Power; EPC Company: Sandpoint, ID, USA, 2022. [Google Scholar]
- Chakraborty, S.; Vu, H.; Hasan, M.; Tran, D.; el Baghdadi, M.; Hegazy, O. DC-DC converter topologies for electric vehicles, plug-in hybrid electric vehicles and fast charging stations: State of the art and future trends. Energies 2019, 12, 569. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Faisal, M.; Ansari, S.; Hannan, M.A.; Karim, T.F.; Ayob, A.; Hussain, A.; Miah, M.S.; Saad, M.H.M. Review of Electric Vehicle Converter Configurations, Control Schemes and Optimizations: Challenges and Suggestions. Electronics 2021, 10, 477. [Google Scholar] [CrossRef]
- Emrani, A.; Adib, E.; Farzanehfard, H. Single-switch soft-switched isolated DC-DC converter. IEEE Trans. Power Electron. 2012, 27, 1952–1957. [Google Scholar] [CrossRef]
- Rashid, M.H. Power Electronics Circuits, Devices, and Applications, 3rd ed.; Pearson Education, Inc.: Delhi, India, 2004. [Google Scholar]
- Batarseh, I.; Wei, H. Power factor correction circuits. In Power Electronics Handbook; Butterworth-Heinemann: Oxfrodm, UK, 2011; pp. 523–547. [Google Scholar]
- Siwakoti, Y.P.; Forouzesh, M.; Pham, N.H. Power electronics converters-an overview. In Control of Power Electronic Converters and Systems; Elsevier: Amsterdam, The Netherlands, 2018; pp. 3–29. [Google Scholar] [CrossRef]
- Hack, T. Flyback controller improves cross regulation for multiple output applications. In Analog Circuit Design; Elsevier: Amsterdam, The Netherlands, 2015; pp. 497–498. [Google Scholar] [CrossRef]
- Baba, D. Isolated Supply Overview and Design Trade-Offs Literature Number: SNVA603 POWER Designer Expert tips, Tricks, and Techniques for Powerful Designs Isolated Supply Overview and Design Trade-Offs; Texas Instruments: Dallas, TX, USA, 2009. [Google Scholar]
- Severns, R. The history of the forward converters. Switch. Power Mag. 2000, 1, 20–22. [Google Scholar]
- Habumugisha, D.; Chowdhury, S.; Chowdhury, S.P. A DC-DC interleaved forward converter to step—Up DC voltage for DC Microgrid applications. In Proceedings of the IEEE Power and Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar] [CrossRef]
- Roasto, I.; Vinnikov, D.; Lehtla, T. Analysis of capacitor-related mid-voltage point shift problems in high-voltage half-bridge DC/DC converters. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 3619–3622. [Google Scholar]
- Hou, R.; Magne, P.; Bilgin, B.; Emadi, A. A topological evaluation of isolated DC/DC converters for Auxiliary Power Modules in Electrified Vehicle applications. In Proceedings of the Conference Proceedings—IEEE Applied Power Electronics Conference and Exposition—APEC, Charlotte, NC, USA, 15–19 May 2015; Volume 2015, pp. 1360–1366. [Google Scholar] [CrossRef]
- Baggio, J.E.; Hey, H.; Gründling, H.; Pinheiro, H.; Pinheiro, J.R. Isolated interleaved-phase-shift-PWM DC-DC ZVS converter. IEEE Trans. Ind. Appl. 2003, 39, 1795–1802. [Google Scholar] [CrossRef]
- Zhang, J.; Xie, X.; Wu, X.; Qian, Z. Comparison study of phase-shifted full bridge ZVS converters. In Proceedings of the PESC Record—IEEE Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 1, pp. 533–539. [Google Scholar] [CrossRef]
- Badstuebner, U.; Biela, J.; Christen, D.; Kolar, J. Optimization of a 5-kW telecom phase-shift dc-dc converter with magnetically integrated current doubler. IEEE Trans. Ind. Electron. 2011, 58, 4736–4745. [Google Scholar] [CrossRef]
- Deshmukh, S.; Iqbal, A.; Islam, S.; Khan, I.; Marzband, M.; Rahman, S.; Al-Wahedi, A.M. Review on classification of resonant converters for electric vehicle application. Energy Rep. 2022, 8, 1091–1113. [Google Scholar] [CrossRef]
- Koscelnik, J.; Frivaldsky, M.; Prazenica, M.; Mazgut, R. A Review of Multi-Elements Resonant Converters Topologies. In Proceedings of the 10th International Conference, Rajecke Teplice, Slovakia, 19–20 May 2014; pp. 312–317. [Google Scholar] [CrossRef]
- Salem, M.; Yahya, K. Resonant Power Converters. Available online: www.intechopen.com (accessed on 15 September 2022).
- Yu, S.-Y.; Chen, R.; Viswanathan, A. Power Supply Design Seminar Reproduced from 2018 Texas Instruments Power Supply Design Seminar SEM2300, Topic 1 TI Literature Number. 2018. Available online: www.ti.com/psds (accessed on 25 September 2022).
- Zhou, X. A High Efficiency High Power-Density LLC DC-DC Converter for Electric Vehicles (EVs) On-Board Low Voltage DC-DC Converter (LDC) Application; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Rodriguez-Rodriguez, J.; Salgado-Herrera, N.; Torres-Jimenez, J.; Gonzalez-Cabrera, N.; Granados-Lieberman, D.; Valtierra-Rodriguez, M. Small-signal Model for Dual-active-bridge Converter Considering Total Elimination of Reactive Current. J. Mod. Power Syst. Clean Energy 2021, 9, 450–458. [Google Scholar] [CrossRef]
- Hou, R.; Emadi, A. Dual active bridge-based full-integrated active filter auxiliary power module for electrified vehicle applications with single-phase onboard chargers. In Proceedings of the Conference Proceedings—IEEE Applied Power Electronics Conference and Exposition—APEC, Long Beach, CA, USA, 20–24 March 2016; pp. 1300–1306. [Google Scholar] [CrossRef]
- Pledl, G.; Tauer, M.; Buecherl, D. Theory of operation, design procedure and simulation of a bidirectional LLC resonant converter for vehicular applications. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, VPPC 2010, Lille, France, 1–3 December 2010. [Google Scholar] [CrossRef]
- Hillers, A.; Christen, D.; Biela, J. Design of a highly efficient bidirectional isolated LLC resonant converter. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012. [Google Scholar]
- Niu, J.; Wu, X.; Wang, Y.; Jing, L.; Zhang, W.; Tong, Y. Backward Step-Up Control Strategy for Bidirectional LLC Resonant Converter. Energies 2022, 15, 4471. [Google Scholar] [CrossRef]
- Arazi, M.; Payman, A.; Camara, M.; Dakyo, B. Bidirectional interface resonant converter for wide voltage range storage applications. Sustainability 2022, 14, 377. [Google Scholar] [CrossRef]
- Design Guide: TIDM-02002 Bidirectional CLLLC Resonant Dual Active Bridge (DAB) Reference Design for HEV/EV Onboard Charger. 2019. Available online: www.ti.com (accessed on 13 August 2022).
- Yan, Y.H.; Cheng, H.L.; Chan, S.Y.; da Chen, Y.; Chang, Y.N. Design of an isolated bidirectional symmetric resonant converter. Appl. Sci. 2020, 10, 8144. [Google Scholar] [CrossRef]
- Xu, G.; Tang, J.; Zhang, L.; Xiong, W.; Sun, Y.; Su, M. A Hybrid Extended Phase Shift Modulation Strategy for DAB Converter with DC Blocking Capacitor to Extend ZVS Range and Reduce RMS Current. IEEE J. Emerg. Sel. Top Power Electron. 2022, 10, 22184450. [Google Scholar] [CrossRef]
- IEEE Power Electronics Society; IEEE Power & Energy Society; IEEE Industry Applications Society; Institute of Electrical and Electronics Engineers. Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 22–26 June 2020; IEEE: Piscataway Township, NJ, USA, 2020. [Google Scholar]
- Wang, M.; Pan, S.; Zha, X.; Gong, J.; Lin, W.; Gao, J.; Deng, Q. Hybrid Control Strategy for an Integrated DAB-LLC-DCX DC-DC Converter to Achieve Full-Power-Range Zero-Voltage Switching. IEEE Trans. Power Electron. 2021, 36, 14383–14397. [Google Scholar] [CrossRef]
- Ribeiro, E.; Cardoso, A.M.; Boccaletti, C. Fault diagnosis in unidirectional non-isolated DC-DC converters. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition, ECCE 2014, Pittsburgh, PA, USA, 14–18 September; pp. 1140–1145. [CrossRef]
- Chen, Y.; Pei, X.; Nie, S.; Kang, Y. Monitoring and diagnosis for the DC-DC converter using the magnetic near field waveform. IEEE Trans. Ind. Electron. 2011, 58, 1634–1647. [Google Scholar] [CrossRef]
- Bento, F.; Marques Cardoso, A.J. A Comprehensive Survey on Fault Diagnosis and Fault Tolerance of DC-DC Converters. Chin. J. Electr. Eng. 2018, 4, 1–12. [Google Scholar]
- Givi, H.; Farjah, E.; Ghanbari, T. A comprehensive monitoring system for online fault diagnosis and aging detection of non-isolated DC-DC converters’ components. IEEE Trans. Power Electron. 2019, 34, 6858–6875. [Google Scholar] [CrossRef]
- Danny, E.; Jacky, J.; Benny, R. ISOLATED DC-DC Converter EC5SAW SERIES APPLICATION NOTE; Cincon Electronics CO., LTD: Taipei, Taiwan, 2019. [Google Scholar]
- Keshan, H.; Thornburg, J.; Ustun, T. Comparison of Lead-Acid and Lithium Ion Batteries for Stationary Storage in Off-Grid Energy Systems. In Proceedings of the 4th IET Clean Energy and Technology Conference (CEAT 2016), Kuala Lumpur, Malaysia, 14–15 November 2016. [Google Scholar]
- Li, M.; Feng, M.; Luo, D.; Chen, Z. Fast Charging Li-Ion Batteries for a New Era of Electric Vehicles. Cell Rep. Phys. Sci. 2020, 1, 212. [Google Scholar] [CrossRef]
- Bai, H.; Mi, C.; Wang, C.; Gargies, S. The Dynamic Model and Hybrid Phase-Shift Control of a Dual-Active-Bridge Converter. In Proceedings of the 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2013. [Google Scholar]
- IEEE Power Electronics Society; Institute of Electrical and Electronics Engineers; IEEE Industry Applications Society. Small-Signal Modeling and Stability Analysis of a Bidirectional Electric Vehicle Charger. In Proceedings of the 6th IEEE International Conference on Renewable Energy Research and Applications (ICRERA 2017), San Diego, CA, USA, 5–8 November 2017. [Google Scholar]
- Safayatullah, M.; Batarseh, I. Small Signal Model of Dual Active Bridge Converter for Multi-Phase Shift Modulation. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 5960–5965. [Google Scholar] [CrossRef]
- Russell, A. Distributing Power to HEV/EV Electrical Systems with DCMsTM the DC-DC Converter Module (DCM). Available online: www.vicorpower.com (accessed on 20 August 2022).
- Ampere Time Technology Company Website. LiFePO4 Battery Voltage Charts (12V, 24V & 48V). 2022. Available online: https://footprinthero.com/lifepo4-battery-voltage-charts (accessed on 18 October 2022).
- Texas Instruments. Bidirectional DC-DC Converter. 2015. Available online: www.ti.com (accessed on 24 October 2022).
- Shuai, S.; Linglin, C.; Zhenyu, S.; Fei, G.; Hui, C.; Deshang, S.; Tomislav, D. Modeling and Advanced Control of Dual-Active-Bridge DC-DC Converters: A Review Index Terms-DC-DC, dual active bridge (DAB), reduced-order model, generalized average model, discrete-time model, feedback control, feedforward control, model predictive control. IEEE Trans. Power Electron. 2022, 37, 2021. [Google Scholar] [CrossRef]
- Sun, X.; Wu, X.; Shen, Y.; Li, X.; Lu, Z. A Current-Fed Isolated Bidirectional DC-DC Converter. IEEE Trans. Power Electron. 2017, 32, 6882–6895. [Google Scholar] [CrossRef]
- Krishnamurthy, H.K. Modular Power Conversion Architecture. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, 2008. [Google Scholar]
- Mueller, J.; Kimball, J. An Improved Generalized Average Model of DC-DC Dual Active Bridge Converters. IEEE Trans. Power Electron. 2018, 33, 9975–9988. [Google Scholar] [CrossRef]
- Sibue, J.R.; Ferrieux, J.P.; Meunier, G.; Periot, R.; Clavel, E. Generalized Average Model of Series-Parallel Resonant Converter with Capacitive Output Filter for High Power Application. Available online: https://hal.archives-ouvertes.fr/hal-00521993 (accessed on 16 July 2022).
- Zhao, C.; Round, S.; Kolar, J.W. Full-order averaging modelling of zero-voltage-switching phase-shift bidirectional DC-DC converters. IET Power Electron. 2010, 3, 400–410. [Google Scholar] [CrossRef]
- Costinett, D.; Zane, R.; Maksimović, D. Discrete-time small-signal modeling of a 1 MHz efficiency-optimized dual active bridge converter with varying load. In Proceedings of the 2012 IEEE 13th Workshop on Control and Modeling for Power Electronics, COMPEL 2012, Kyoto, Japan, 10–13 June 2012. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J. Accurate small-signal model for the digital control of an automotive bidirectional dual active bridge. IEEE Trans. Power Electron. 2009, 24, 2756–2768. [Google Scholar] [CrossRef]
- Randive, V.; Wandhre, R. Simplified State-Space Average Model and Control Strategy for the Dual Active Bridge Power Converter. In Proceedings of the IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar]
- Zhang, K.; Eng, B. Large-and small-signal average modeling of dual active bridge dc-dc converter considering power losses. IEEE Trans. Power Electron. 2013, 32, 1964–1974. [Google Scholar] [CrossRef]
- Ab-Ghani, S.; Daniyal, H.; Jaalam, N.; Ramlan, N.H.; Saad, N.M. Time-Variant Online Auto-Tuned PI Controller Using PSO Algorithm for High Accuracy Dual Active Bridge DC-DC Converter. In Proceedings of the 2022 IEEE International Conference on Automatic Control and Intelligent Systems, I2CACIS 2022, Shah Alam, Malaysia, 25 June 2022; pp. 36–41. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Chen, L.; Shuai, S.; Dragicevic, T. Large signal stability analysis of DAB converter using Moving Discretized Control Set- Model Predictive Control. In Proceedings of the ECCE 2020—IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020; pp. 5922–5929. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Chen, L.; Shao, S.; Dragicevic, T.; Wheeler, P.; Zanchetta, P. Finite Control Set Model Predictive Control for Dual Active Bridge Converter. IEEE Trans. Ind. Appl. 2022, 58, 2155–2165. [Google Scholar] [CrossRef]
- Shan, Z.; Jatskevich, J.; Iu, H.; Fernando, T. Simplified load-feedforward control design for dual-active-bridge converters with current-mode modulation. IEEE J. Emerg. Sel. Top Power Electron. 2018, 6, 2073–2085. [Google Scholar] [CrossRef]
- Jeung, Y.; Lee, D. Voltage and Current Regulations of BidirectionalIsolated Dual-Active-Bridge DC–DC ConvertersBased on a Double-Integral Sliding Mode Control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- Mattavelli, P.; Rossetto, L.; Spiazzi, G.; Tenti, P. GENERAL-purpose sliding-mode controller for DC/DC converter applications. In Proceedings of the IEEE Power Electronics Specialist Conference—PESC ‘93, Seattle, WA, USA, 20–24 June 1993. [Google Scholar]
- Institute of Electrical and Electronics Engineers. Model Predictive Control of Dual Active Bridge Converter Based on the Lookup Table Method. In Proceedings of the 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019. [Google Scholar]
- Nardoto, A.; Amorim, A.; Santana, N.; Bueno, E.; Encarnação, L.; Santos, W. Adaptive Model Predictive Control for DAB Converter Switching Losses Reduction. Energies 2022, 15, 6628. [Google Scholar] [CrossRef]
- Chen, L.; Lin, L.; Shao, S.; Gao, F.; Wang, Z.; Wheeler, P.W.; Dragičević, T. Moving discretized control set model-predictive control for dual-active bridge with the triple-phase shift. IEEE Trans. Power Electron. 2020, 35, 8624–8637. [Google Scholar] [CrossRef]
- Yang, H.; Yang, L. Model Reference Adaptive Control Strategy for Dual Active Bridge Converter with Improved Reference Model. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications, ICoPESA 2022, Singapore, 25–27 February 2022; pp. 298–303. [Google Scholar] [CrossRef]
- High Fidelity Electric Modeling. D1.1-Document describing the safety requirements and modelling guidelines-PU Deliverable Title Document describing the safety requirements and modeling guidelines, 2018. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5c0ed0461&appId=PPGMS (accessed on 12 December 2022).
- Xie, Y.; Liu, Z.; Li, K.; Liu, J.; Zhang, Y.; Dan, D.; Wu, C.; Wang, P.; Wang, X. An improved intelligent model predictive controller for cooling system of electric vehicle. Appl. Therm. Eng. 2021, 182, 116084. [Google Scholar] [CrossRef]
- Subramanian, M.; Hoang, A.T.; Kalidasan, B.; Nižetić, S.; Solomon, J.M.; Balasubramanian, D.; Subramaniyan, C.; Thenmozhi, G.; Metghalchi, H.; Nguyen, X.P. A technical review on composite phase change material based secondary assisted battery thermal management system for electric vehicles. J. Clean. Prod. 2021, 322, 129079. [Google Scholar] [CrossRef]
- Vitesco Technologies. Available online: https://www.vitesco-technologies.com/en-us/products?solution-categories=electrification&product-categories=high-voltage (accessed on 8 November 2022).
- BOSCH. Available online: https://www.bosch-mobility-solutions.com/en/ (accessed on 8 November 2022).
- Vitesco Technologies. Available online: https://www.vitesco-technologies.com/getmedia/b2c6898c-caa7-42a1-9fb1-cf2f9ac3c0b8/210406_Solutions_Booklet.pdf” (accessed on 10 October 2022).
- Bosch. High Voltage DC-DC Converter 3evo Model. Available online: https://www.bosch-mobility-solutions.com/en/solutions/power-electronics/high-voltage-dc-dc-converter-generation-3evo/ (accessed on 23 August 2022).
- Borgwarner Company. High Voltage DC-DC Converter. Available online: https://cdn.borgwarner.com/docs/default-source/default-document-library/high-voltage-dc-dc-converter-product-sheet.pdf?sfvrsn=3027b23c_12 (accessed on 23 August 2022).
- General Motors. Chevorlet Volt DC-DC Converter. Available online: http://media3.evtv.me/VoltAPMUserGuide.pdf (accessed on 23 August 2022).
- GreenWhattPower (GWP) Company. 3000 Watt DC/DC Converter. Available online: https://greenwattpower.com/wp-content/uploads/Datasheet-EVD-3000.pdf (accessed on 23 August 2022).
- BEL Group. 700DNC40-12-xG Liquid Cooled Model 700DNC40-12-CG Convection Cooled Model; BEL Group: Suresnes, France, 2020. [Google Scholar]
- DC/DC Converter for Electric and hybrid Vehicle Applications. Available online: www.evs-inmotion.com (accessed on 12 November 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Ref. |
|---|---|---|
| Maximum peak-peak ripple voltage requirements for LV filter capacitor design | 400 [mV] | [27] |
| EMC filter AC ripple voltage filtering requirements | AC peak-peak voltage: 6 [V] Frequency range: 15 [Hz]–30 [kHz] | [28] |
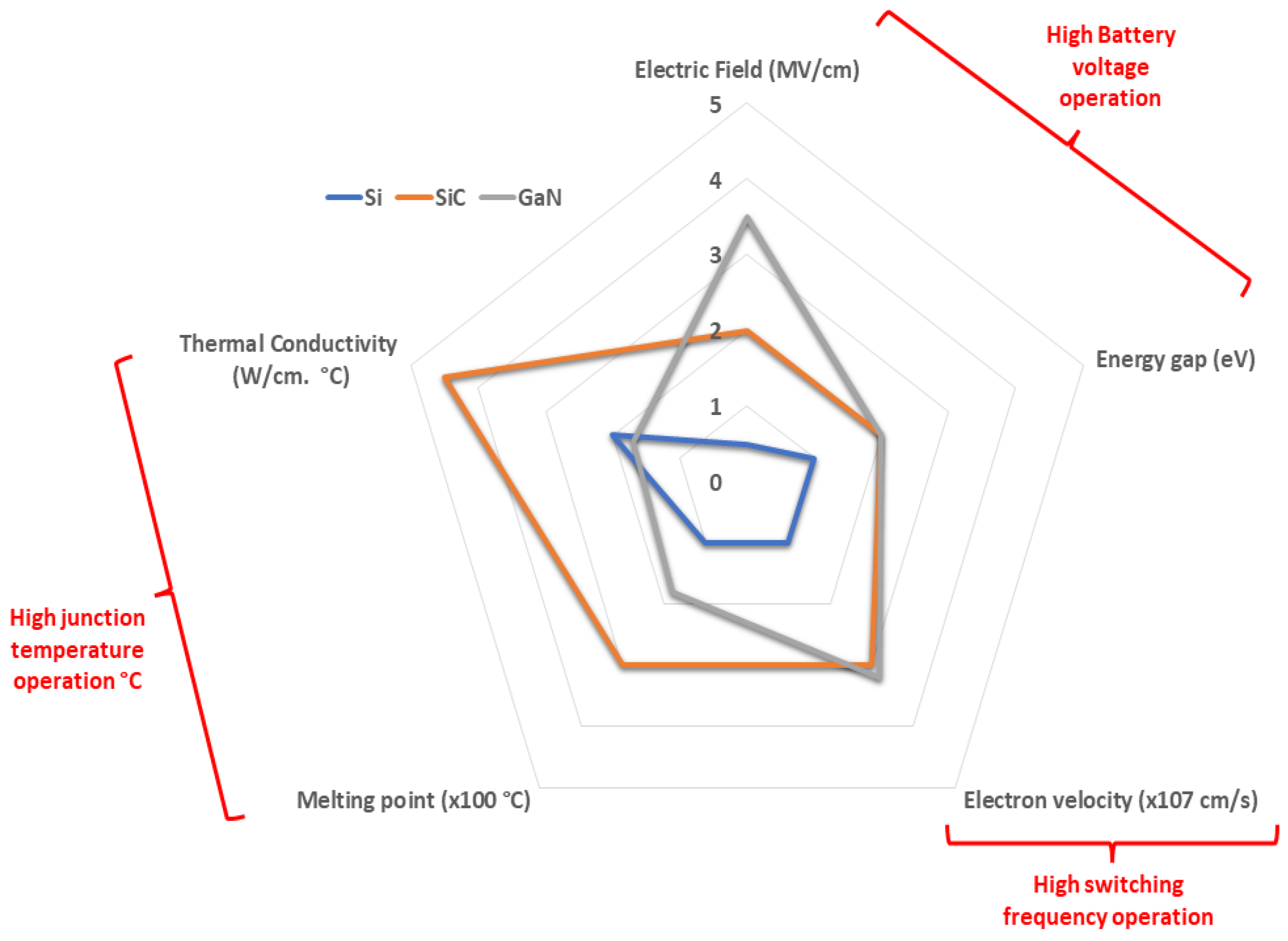
| Metrics | Comparison | ||
|---|---|---|---|
| Conduction loss @ 100 °C | SiC | GaN | |
| Switching losses | |||
| Thermal capability | |||
| Power density | |||
| Cost | |||
| Efficiency | |||
| Requirement | Comment | Standard | Ref. |
|---|---|---|---|
| Galvanic isolation and high-voltage electrical safety |
| ISO 17409, ISO 6469-3, ISO 26262 | [23,27,53] |
| EV’s LV network voltage requirements |
| LV 124/148 | [35,54] |
| EMC compatibility |
| EN61204-3, CSPR 22, ISO 7697-1/-2 | [26,28,29] |
| Efficiency and lifetime |
| AEC-Q101 | [38,55,56,57,58,59] |
| Power density (kW/L) and specific power density (kW/kg) |
| - | [17,50,60] |
| Bidirectional power flow capability |
| [19] | |
| Protection |
| [34,61] |
| Topology | Power [kW] | HV/LV [V] | Eff. [%] | Switching Frequency [kHz] | Power Density [kW/L] | Features | Drawbacks | Tf. (1) | Q (2) | L (3) | C (4) | Ref. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Flyback converter | 1.8 (Unidirectional) | 300–450/12/24 (SIMO) | 91 | 100 | - |
|
| 2 Two Winding | 4 | 0 | 2 | [63] |
| Forward-Flyback hybrid converter | 0.3 (Bidirectional) | 153–180/10–15 (SISO) | 93.5 | - | - |
|
| 2 Two Winding | 4 | 0 | 2 | [65] |
| Push-pull converter | 1 (Unidirectional) | 400/24 (SISO) | - | 20 | - |
|
| 1 Two Winding | 2 | 0 | 6 | [66] |
| Half-bridge converter+ CLLC resonant TAB converter | APM: 0.5 (Unidirectional) OBC: 1.1 (Bidirectional) | 400/12 (SIMO) one port APM and one port OBC | APM 94 OBC 96 | 200 | 0.7 |
|
| 1 Three Winding | 10 | 0 | 6 | [62] |
| Non-isolated buck/boost converter | 0.3 (Bidirectional) | 48/12 (SISO) | 97 | 700 | - |
|
| 0 Non-isolated IC | 2 | 1 | 1 | [70] |
| Full-bridge converter | 2 (Unidirectional) | 200–400/12 (SISO) | 95 | 100 | 0.5 |
|
| 1 Two Winding | 6 | 0 | 3 | [69] |
| Full-bridge + LLC resonant converter | 3.8 (Unidirectional) | 200–400/14 (SISO) | 96.45 | 260–400 | 3 |
|
| 3 Three Winding | 30 | 0 | 13 | [91] |
| Dual half bridge (DHB) | 1.5 (Bidirectional) | 290/18–32 (SISO) | 97 | 250 | - |
|
| 1 Two Winding | 4 | 1 | 4 | [55] |
| Dual active bridge (DAB) | 2.4 (Bidirectional) | 400/11–16 (SISO) | - | 100 | - |
|
| 1 Two Winding | 8 | 1 | 2 | [93] |
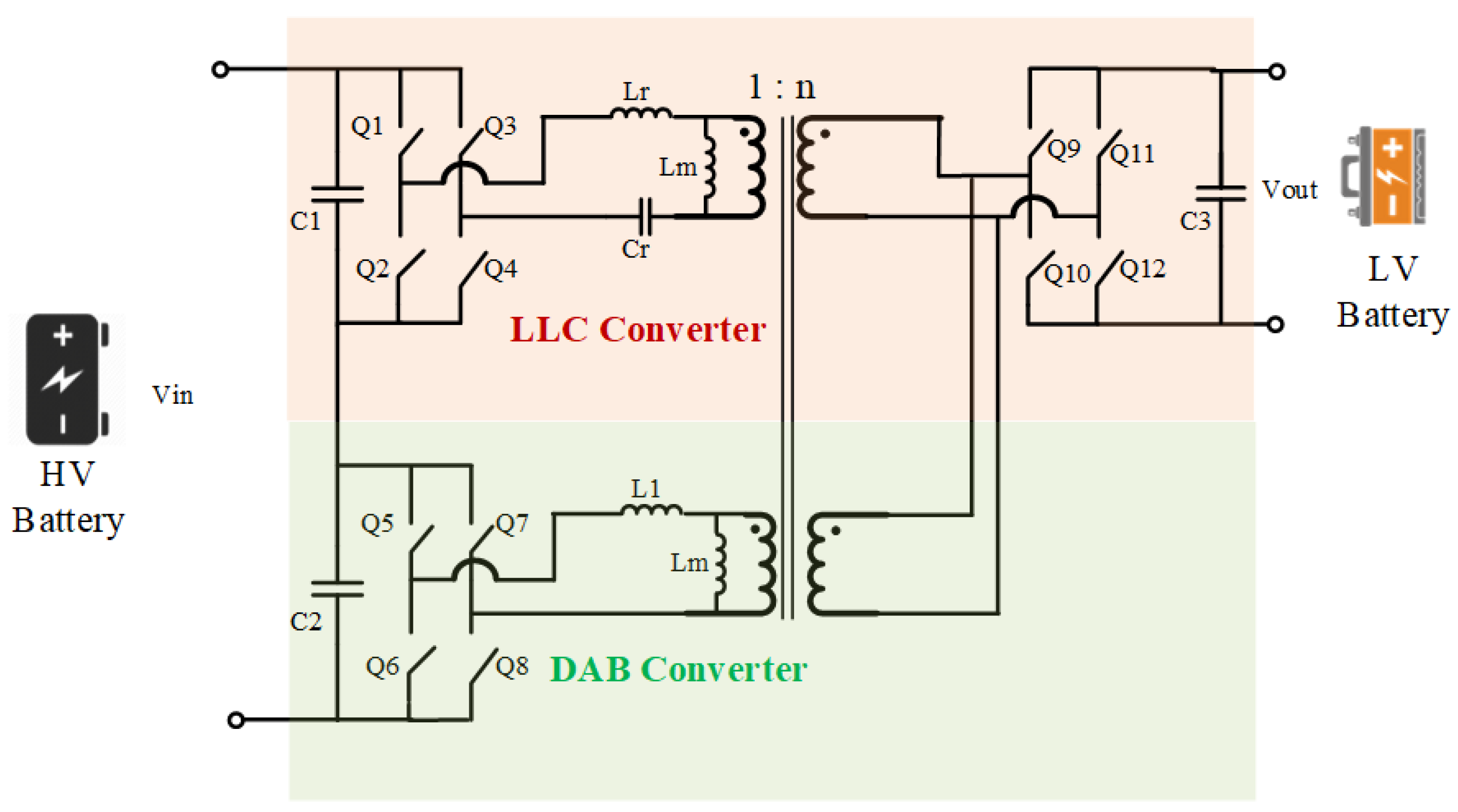
| Comparison of the DAB and LLC resonance converter | 0.33 (Bidirectional) | 400/20 (SISO) | 94.9 | 1000 | - |
|
| 1 Two Winding | 6 | 0 | 2 | [57] |
| Triple Active Bridge (TAB) | 3.6 (Bidirectional) | 500/15 (SIMO) | - | - | - |
|
| 1 three Winding | 12 | 0 | 4 | [58] |
| LLC resonant converter | 1.65 (Bidirectional) | 450/17–56 (SISO) | 97.6 | 140 | - |
|
| 1 Two Winding | 8 | 0 | 3 | [95] |
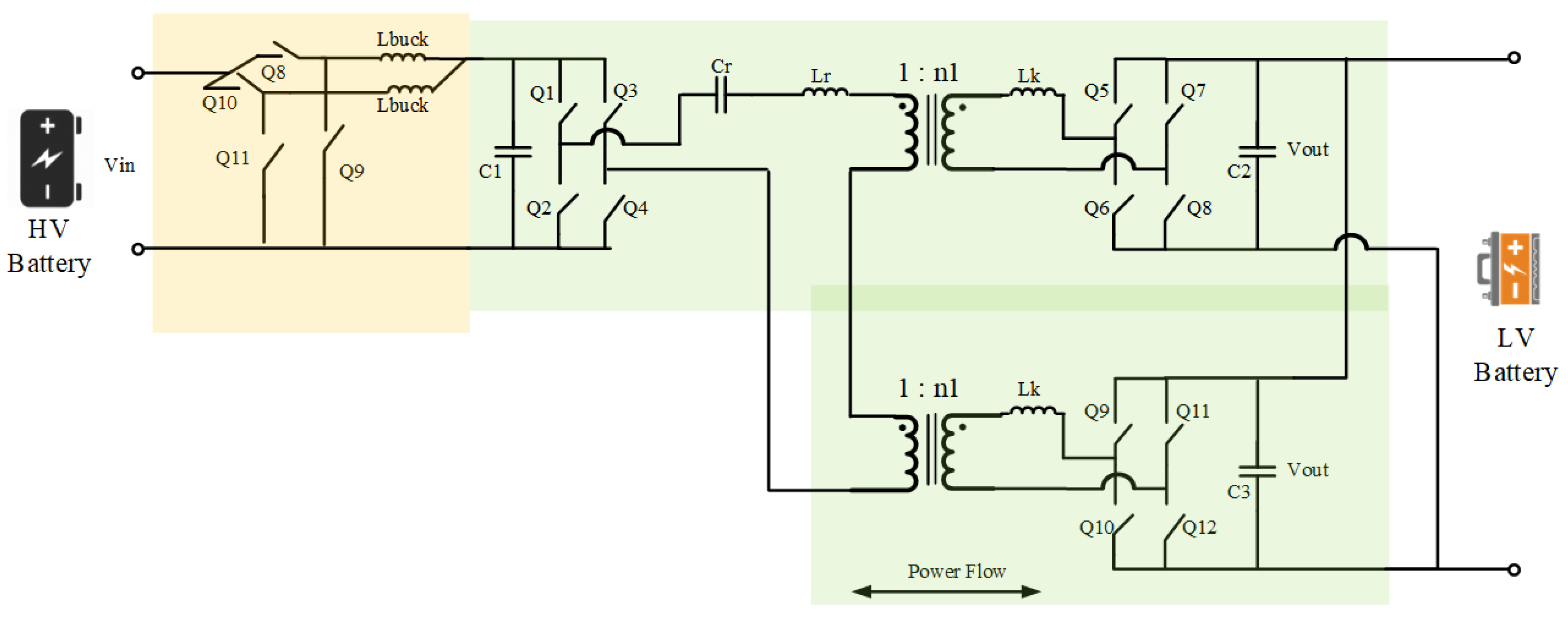
| Two stages Non-isolated interleaved Buck + LC resonance converter | Rated: 3.6 Peak: 6 (Bidirectional) | 250–450/12 | 96 | 100 front end buck 300 LC resonance transform-er | 2 |
|
| 2 Two Winding | 16 | 2 | 4 | [101] |
| Modeling Method | Model Complexity | Small-Signal Accuracy against Highly Polluted Signals | System Losses Realization | System High Frequency Components Realization |
| Reduced-order model | Low [116] | High [116] | Average [125] | Average [125] |
| Continuous-time state-space full-order model | High [116] | Low [120] | Excellent [125] | Excellent [125] |
| Discrete-time state-space full-order model | High [116] | High [116] | Excellent [125] | Excellent [125] |
| Control Method | Response Time (s) | Dynamic Behavior | Complexity | Ref. |
|---|---|---|---|---|
| Feedback only | 0.0789 | slow | simple | [92] |
| Feedforward + feedback | 0.04 | slow | average | [124] |
| Sliding mode control | 0.0033 | fast | complex | [131] |
| Model predictive control | 0.004 | fast | complex | [132] |
| Company | Power [kW] | HV/LV [V] | Eff. [%] | Power Density [kW/L] | Specific Power Density [kW/kg] | Cooling | Features | Ref. |
|---|---|---|---|---|---|---|---|---|
| Toyota Prius | 0.5 (Unidirectional) | 200/12 (SISO) | 90 | - | - | - | - | [67] |
| Vitesco | 3.5 (Unidirectional) | 200–450/8–16 (SISO) | 95 | 1.4 | 1.3 | - |
| [141] |
| Fraunhofer IISB | 3 @ 12 V 5 @ 24 V,48 V (Unidirectional) | Two modules series input connection 550–800/12,24,48 (SIMO) Two modules parallel input connection 225–400/12,24,48 (SIMO) | 96 | 5 | 2.2 | - |
| [17] |
| Brusa [BSC624] | 3.5 (Bidirectional) | 220–450/12–24 (SISO) | 96 | 0.95 | 0.73 | Liquid cooled |
| [19] |
| Bosch generation-3 | Forward Power: 3.6–8 Reverse Power: 1.5 (Bidirectional) | 250–475/10.5–15.5 (SISO) | 95 | - | - | Liquid cooled |
| [142] |
| BorgWarner Gen5 | 1.2 @ 12 V 7.2 @ 48 V (Bidirectional) | 220–800/12–48 (SISO) | 92 | 1.37 | - | Liquid cooled |
| [143] |
| Delphi | Forward Power: 2.2 Reverse Power: 0.6 (Bidirectional) | 216–422/7–15.5 (SISO) | 90 | 0.5 | 0.44 | Liquid cooled [50/50 mixture H2 O/glycol] |
| [59] |
| General Motors [Chevrolet Volt] | 2 (Unidirectional) | 260–420/11–15.5 (SISO) | 90 | 0.3 | - | Air cooled |
| [144] |
| Eaton | 3 (Unidirectional) | 225–450/12–28 (SISO) | 94 | 0.7 | 0.56 | Liquid cooled |
| [54] |
| GreenWhattPower [GWD] | 3 (Unidirectional) | 280–800/28–48 (SISO) | 96 | 1.2 | 0.9 | Air cooled |
| [145] |
| Meta-System | 3.6 (Unidirectional) | 400–800/12 (SISO) | 94 | - | - | Liquid cooled |
| [53] |
| Deutronic | 3 (Unidirectional) | 400–800/12–48 (SISO) | 95 | 0.64 | 0.5 | Air cooled |
| [27] |
| BrightLoop GaN systems | 9.6 (Bidirectional) | 400–950/10–56 V (SIMO up to 8 outputs) | 95 | 2.17 | 2 | Liquid or air cooled |
| [60] |
| Bel Power | 4 (Unidirectional) | 400–800/12 (SISO) | 93 | 0.4 | 0.36 | Liquid cooled |
| [146] |
| Inmotion | 3.7 (Unidirectional) | 350–650/12–28 (SISO) | 95 | 0.305 | 0.34 | Liquid cooled |
| [147] |
| Ovartech [VDD302 S360-14] | 3.6 (Unidirectional) | 200–420/12 (SISO) | 94 | 0.8 | 1.4 | Air cooled |
| [61] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotb, R.; Chakraborty, S.; Tran, D.-D.; Abramushkina, E.; El Baghdadi, M.; Hegazy, O. Power Electronics Converters for Electric Vehicle Auxiliaries: State of the Art and Future Trends. Energies 2023, 16, 1753. https://doi.org/10.3390/en16041753
Kotb R, Chakraborty S, Tran D-D, Abramushkina E, El Baghdadi M, Hegazy O. Power Electronics Converters for Electric Vehicle Auxiliaries: State of the Art and Future Trends. Energies. 2023; 16(4):1753. https://doi.org/10.3390/en16041753
Chicago/Turabian StyleKotb, Ramy, Sajib Chakraborty, Dai-Duong Tran, Ekaterina Abramushkina, Mohamed El Baghdadi, and Omar Hegazy. 2023. "Power Electronics Converters for Electric Vehicle Auxiliaries: State of the Art and Future Trends" Energies 16, no. 4: 1753. https://doi.org/10.3390/en16041753
APA StyleKotb, R., Chakraborty, S., Tran, D.-D., Abramushkina, E., El Baghdadi, M., & Hegazy, O. (2023). Power Electronics Converters for Electric Vehicle Auxiliaries: State of the Art and Future Trends. Energies, 16(4), 1753. https://doi.org/10.3390/en16041753