
The Electrical Behaviour of Railway Pantograph Arcs


Abstract
1. Introduction
2. Physical and Electrical Behaviour of the Electric Arc
2.1. Electrical Characteristics and Basic Physics
- the average electric field intensity and arc temperature increase almost linearly with separation of electrodes [58];
- as expected, also the arc voltage increases linearly, at a rate of 2 V every 1 mm for a current conduction of about 100 A [58];
- the inception voltage for AC phenomena has an indefinite behaviour for small to intermediate arc length values (a larger value at 2 and 5 mm, reducing at about 10 mm and increasing again), but definitely larger for very long arcs (50 mm).
2.2. Electric Arc Models
2.2.1. Static Electric Arc Model
- Steinmetz [45] more than 100 years ago carried out experiments on carbon electrodes for DC arcs at a fixed separation of mm (1 inch), reporting the following synthetic expression:having adapted the expression from inches to mm for the quantity d.
- Always for DC systems, Nottingham [61] reported for copper electrodes:where the exponent n of is indicated by the author himself as 0.665 for the tested separation and on average 0.67 for the separation ranging between 1 and 10 mm. In addition, it is observed that the exponent value is ruled by the material of the anode, being 0.995 for a carbon anode (ideally 1), although the used cathode was copper.
- Browne [62] comments on the influence of short and long arcs and then reports an expression of general use:having adapted the expression from inches to mm for the quantity d.
- Fisher [63] carried out AC measurements up to 20 kA and for a 25 mm to 100 mm arc length d, resulting in this empirical expression:having adapted the expression from inches to mm for the quantity d.
- Stokes and Oppenlander [64] identified a transition current level , above which they derived an expression based on several measurements up to 20 kA and a 5 mm to 500 mm arc length d:
- Van and Worrington’s model [65] has been discussed in [59] for a better interpretation and interpolation of the original data; the originally proposed formulation and the one using outlier removal by robust fitting are:It must be noted that [66] reports a coefficient of 28.71 instead of 28.69.
- Goda et al. [60] report previous studies formulating a linear relationshipagain, having included a dividing ‘1000’ factor to express d in .
- Andrade et al. [66] provide a thorough evaluation of models for long arcs and high voltage levels, some of which are already reported above;
- Paukert collected various measurements from other researchers ranging from 100 A to 100 kA and gaps between 1 mm and 200 mm.
2.2.2. Dynamic Electric Arc Model
- Cassie’s model is based on the assumption that the arc current density is constant, and so its resistivity and stored energy per unit volume. The resistance r is expressed as a function of voltage referred to a constant steady-state arc voltage and of arc time constant , equal to the ratio of the energy stored and the energy loss (named energy loss rate), both per unit volume.The use of conductance g in place of resistance r is to ease the numeric calculation of expressions, as at very low resistance values convergence problems may arise.
- Mayr’s model instead assumes a heat loss occurring at the periphery of the arc, so that arc conductance varies with the stored energy.It is interesting to observe that for almost steady (or slowly varying) conditions, and the model describes a hyperbolic characteristic and that may increase well above the product , allowing lower and lower current until arc extinction. Also in this case, rewriting for arc conductance brings to a simplification:
- An improved Mayr’s model was proposed by Schwarz [53], where the time constant and the cooling power threshold were made dependent on the arc conductance following a power law with two exponents, p and q:This method is what is in reality assumed by [73], with phrasing “first modified Schwarz model with two time-variant parameters”, namely and , with the time-varying characteristic indirectly assigned by means of dependency on the arc conductance g.
- Habedank proposed the straightforward approach of defining a threshold current , holding (13) valid below it and (11) above it [54,75]. However, it is apparent that a problem of consistency occurs of the left and right derivatives at the transition point. This can be cured by allowing a smooth transition, that means mixing the results of the two intervals with a variable, but continuous, weighting factor [76]: the two conductance terms and of the two Cassie and Mayr models, respectively, are then combined asIn [76] the selected function is ; Dai et al. [77] assign the value 1.2 to the exponent for a arc heater application. It is evident that is still to be defined and that it represents another degree of freedom of the model, or in other words a parameter that needs a further assumption on the internal physical behaviour of the arc: in [76] it is assumed that the energy loss rate is larger at low current and then stabilises to a lower value with an exponential decay: .
- Schavemaker et al. [78] proposed a more detailed analysis of the transition between Cassie and Mayr models, de facto improving the Habedank model. Another positive feature of the proposed model is that, compared to e.g., KEMA and other modified Mayr’s models, it requires fixing only 3 parameters, so easing the convergence of the fitting algorithm.where and are two cooling constants: the former measured in is related to the design of the breaker in the original work (and transferable to the sliding contact arc); the latter is a pure coefficient controlling the influence of the electrical power at the input on the cooling power, so including the pressure build-up caused by ohmic heating during arc extinction; is a time constant in . The values provided by the authors [78] for the experimental data measured at KEMA Laboratories are: , and .An improved expression was then proposed by observing that modelled arc voltage was lower than the measured one for large currents, but this is a workaround where the correct value is determined experimentally a posteriori:
- As for the combined Mayr-Cassie model proposed by Tseng et al. [76] with smooth transition across the defined threshold, the Schavemaker model was augmented by a smooth transition of the exponential type into a Cassie model, as proposed by Guardado et al. [74]. In their work they consider the behaviour near the zero current zone, characterised by a low voltage with fast variation, in order to study problems of re-ignition in circuit breakers. The model is quite complex with several parameters:where the introduced parameters are:with and representing two thresholds that separate two regimes of operation of the arc with different characteristics, being the voltage fall when the current i reaches and the Cassie model can be applied, and is the parameter of a Fermi-Dirac like distribution function that describes the shape of the current around the transition point .The authors [74] underline that these , , and are newly introduced parameters that must be determined based on measured data. Calculated and measured values (taken from a high-voltage circuit breaking problem) match quite well with a worst-case deviation within 5%. Since the demonstration was carried out using only one set of measurement results, it is not clear to which extent parameters were tuned to the specific measured data to improve the correspondence with simulation results.
- The already introduced KEMA model was first proposed in 2000 by Smeets and Kertesz [79] and then discussed and used more recently [67,80]. The model consists of three modified Mayr’s models connected in series, that are then subject to numerical fitting. The physical explanation is that of evident variability of behaviour for different current levels, at least for what already commented regarding the 500 A threshold that brings to select a Cassie or Mayr model. In [79] the proposed general arc model iswhere is the time constant, and gives the degree of freedom of transition between a Cassie () or Mayr () model and, as a consequence, the generic parameter takes the form or , for the two cases, respectively.The authors acknowledge the large number of parameters, but fix some of them as “empirical constants” (without pointing out if they are somehow customised instead to the specific problem)From the values it is clear that one model is a Cassie-Mayr and the other two are a quasi-Mayr and a pure Mayr model. In the reported results the k values are given for each tested circuit breaker, but not the T and values.
- Another model was developed [81], that we may call Khakpour’s model, providing a richer set of power terms related to arc physics, namely radiated and turbulent power loss, and power loss due to axial and radial mass flow. The power terms are then related to several physical parameters of the arc, such as the axial and radial mass flow, the speed of sound in the arc, besides geometrical parameters and several tuning parameters. Then the arc conductance would be simply , where is the sum of all power terms. A more practical model that introduces the dependency on the arc diameter was proposed then in [82] and is reported below:having indicated with a and c two parameters and with three different expressions for the arc diameter, namely:For the tests carried out both at AC (2 kV) and with a switched DC square wave (7 kV), the values of the parameters are as shown in Table 1.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Type | V* (V) | b | q | a | c | |
|---|---|---|---|---|---|---|
| AC sin. | 53 | 95 | 0.8 | 1.2 | 0.04 | |
| DC sq. w. | 220 | 21 | 0.8 | 2.64 | 0.18 |
- In [69] the cooling power is linearly proportional to the arc length, including dynamic scenarios where the arc length is subject to change during e.g., circuit breaker opening.
- From this Li et al. [58] introduce their own improved Schwarz arc model with the arc length d introduced directly into the former quantity: .
- Variable arc length conditions were considered by Sawicki addressing dynamic elongation of the arc during e.g., circuit breaker opening, with contacts getting farther apart during manoeuvre, but equally applicable to detachment during a pantograph bounce [71]. His works start from the quantification of the heat dissipation process, considered first as a slow process with respect to external influence, depending on the lateral surface or the volume of the arc column. In [71] several models are discussed, but notation is sometimes ambiguous and numeric values and ranges of variation not always provided; the discussion of such models is anyway interesting, as not only points out similarities between models, but also because it covers a part of the research results that is not often considered by the mainstream publications.
- ‒
- A Cassie-Berger model is introduced [89], using a variable Cassie voltage (following the arc length l with a parameter a) and a power term p that depends on the arc length variation: .
- ‒
- Considering heat dissipation is slow and power loss is going to be determined mainly on the basis of the static characteristic, that we have discussed above in Section 2.2.1, Kulakov modified the Mayr’s model introducing anyway a dependency on arc length variation, but using an estimate of the electric field based on the static characteristic:
- ‒
- ‒
- Abandoning the assumption of a slow heat dissipation process, variations of length and diameter of the electric arc (assumed of cylindrical shape) are taken into account in the model proposed by Voronin (considering the arc column lateral surface) and Sawicki [90,91] (considering the arc volume). The two equations are basically identical, but with a different selection of parameters.The parameters are: damping for the surface model , damping for the volume model , dissipated power for the surface model and dissipated power for the volume model .
- ‒
- The two equations may be combined creating two new parameters describing the combined effect of surface and volume dissipation:
2.3. Electric Contact Resistance as a Function of Contact Force, Sliding Speed and Flowing Current
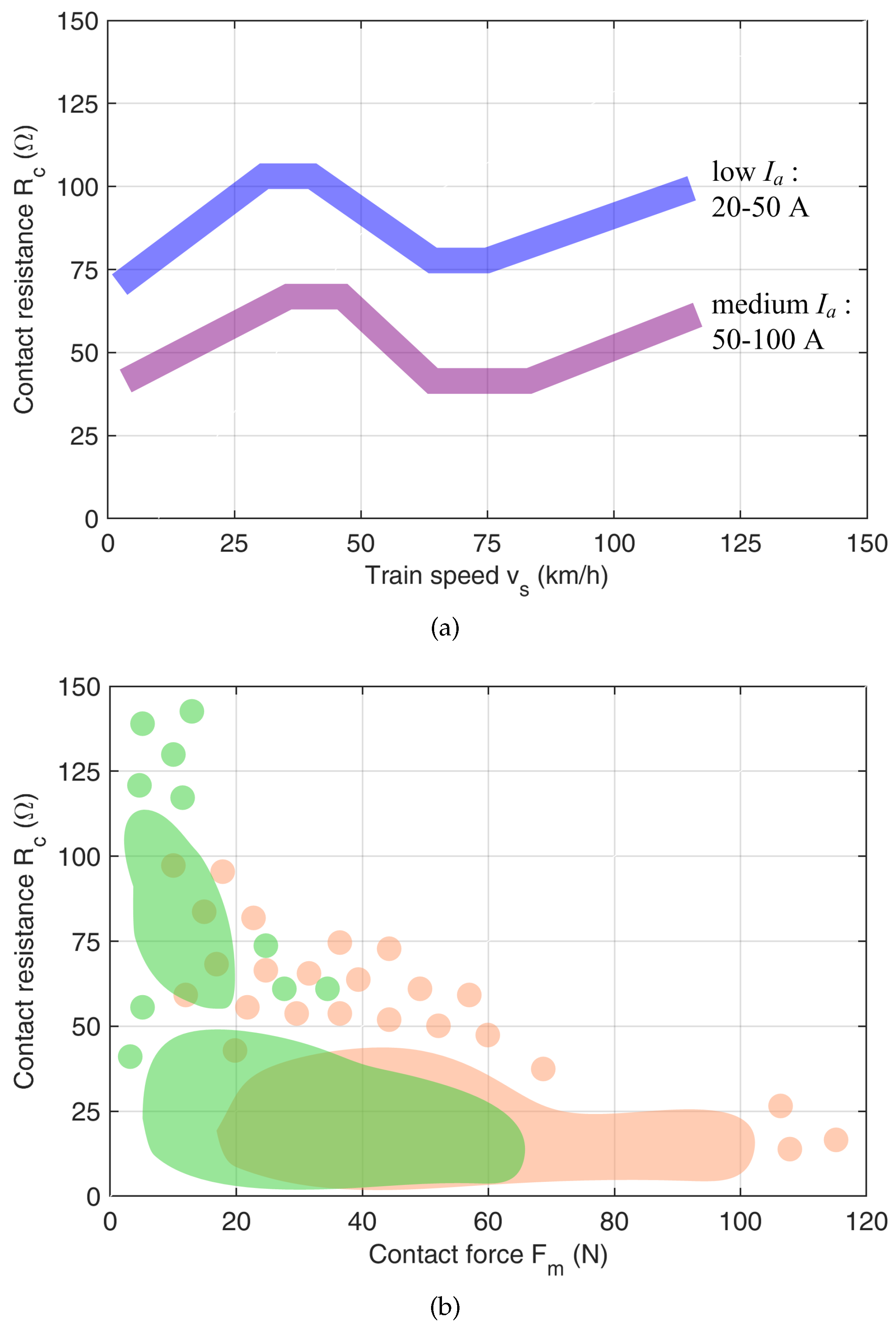
- The static contact resistance arises from the configuration of the stationary pantograph strip pressed against the contact wire and is subject to measurement under different intensity of the flowing current: the behaviour is inversely proportional to both the current intensity and the applied force with a larger variation in the low range of both, e.g., up to 20 A and 50 N to fix some reference values. A qualitative sketch is shown in Figure 4.
- The dynamic contact resistance characterises all configurations with train motion; its behaviour versus current and force is more complex, basically considering that the purely vertical contact force of the static configuration is now skewed by a transverse friction in the direction of motion, with possibly minor components in the lateral direction due to the catenary staggering. The overall behaviour versus speed is an initial increase followed by a saddle with local reduction of the values and then a further increase; it is interesting to observe that this behaviour follows that of the friction coefficient. The exact shape depends of course on the applied force and the flowing current : as for the static contact resistance the most significant variations are observed at the lowest values, similar to the previously identified boundaries of 20 A and 50 N. A qualitative sketch is shown in Figure 4 distinguishing the dependency on train speed v and flowing current .

2.4. Arc Duration and Electrode Erosion
2.4.1. Arc Duration and Its Dynamic Behaviour
2.4.2. Wear and Erosion of the Current Collection System
| is the total normal contact loading force in ; | |
| is the reference contact force in (=90 for the results in [16]); | |
| H | is the material hardness in (=700 for copper); |
| is the fusion latent heat of the contact wire in ; | |
| is the reference arc current in (=500 for the results in [16]); | |
| is the arc current in ; | |
| is an experimentally determined parameter related to the mechanical contact loading (adimensional, =22.4 for the results in [16]); | |
| is an experimentally determined parameter related to the arc current (adimensional, =10.3 for the results in [16]); | |
| is an experimentally determined parameter related to arc erosion (adimensional, =0.4 for the results in [16]); | |
| is the coefficient of dependence on the arc current (adimensional, =4.5 for the results in [16]); | |
| is the coefficient of dependence on the loading force (adimensional, =1.8 for the results in [16]); | |
| is the contact resistance in ; | |
| u | is the fraction of time for which the contact is lost (adimensional); |
| is the relative sliding velocity of the contact surfaces in ; | |
| is the reference velocity at the sliding contact in (=44.4 for the results in [16]); | |
| is the arc voltage, that is the potential difference between the contact wire and the current collector, in ; | |
| is the mass density of copper in (=8940). |
3. Electrical System Transient Response and Low-Frequency Conducted Emissions
- Rolling stock features a main response caused by the resonance of the onboard filter (DC rolling stock) or of the onboard transformer (AC rolling stock); whereas the DC onboard filter resonates around 10 Hz to 20 Hz [26,99], AC transformer resonances may be located at higher frequency, in the order of tens and hundreds of Hz, as they are caused by the stray inductance terms.
- Line resonances for DC and AC railways are very similar, as they depend on the physical length and the per-unit-length parameters (not so different for lines with similar geometry) [100,101,102]; an exception is represented by the low-frequency resonance caused by the substation filter of DC railways studied extensively in [98,103,104].
3.1. Onboard and Substation Filters Excitation in DC Railways
3.2. Onboard Transformer and Converter Excitation in AC Railways
3.3. Excitation of Line Resonances
- line conductors’ resistance is affected by skin effect [108], that depends not only on the magnetic characteristics of the conductor material (copper and copper alloys for supply conductors, magnetic steel for running rails [109]), but on the conductor cross section and shape (small conductors trigger skin effect at higher frequency);
- the soil is one of the conductive paths forming the return circuit, besides the running rails and aerial or buried earth conductors (in electric parallel through various connections and mutual leakage, represented by earth conductance terms).
4. High-Frequency Transients and Radiated Emissions
- results are expressed in dBV/m/MHz using a resolution bandwidth of 10 kHz and measuring distance for the antennas of 1 to 30 m; results are then expressed for a reference distance assuming a far-field radiation mode and that distance was selected as 1 m, invoking the now superseded standard MIL STD 462 [118];
- there is no appreciable influence of the inter-electrode gap on the measured electric field strength;
- arc at low current (below about 50 A) tend to be more unstable and produce slightly higher e.m. emissions; this was particularly evident at 100 MHz (about 5 dB between 50 and 100 A, and almost 10 dB between 100 and 200 A), whereas at 400 MHz the influence reduces to 4 dB between 50 and 100 A and 3 dB between 100 and 200 A;
- frequent ignition and extinction of arcs increase the level of emissions, confirming that stable arcs (as observed at higher current intensity, and we will see in the absence of significant movement of the electrodes and wind) have lower emission profiles.
- A straight time-domain acquisition at high sample rate is unmanageable in terms of amount of data to store and subsequent post-processing; the small subset processed in [120] amounted to 25,700 records of about 2 MB each, over a 100 min travel time.
- Arc transients last for a short time (the time duration ) and are separated by a long time interval (the repetition interval ), for which suitable triggering is able to capture and store only the relevant portions, reducing storage requirements and need to locate the transient within much longer recordings; nevertheless the information should be retained for its relevance to interference to radio communication system (RCS) (see Section 5).
- Frequency domain equipment could be used to reduce the amount of data, set to max hold with a fast sweep or in zero span mode; the latter in fact would allow to follow the entire test run with multiple arcs, although it is applicable to RCS interference scenarios, having defined the centre frequency and the resolution bandwidth (RBW); the short values, however, require sufficiently large RBW values, larger than most of RCS bandwidth values; in the end even selecting 10 MHz may require some compensation for pulse desensitisation [121], sec. 9.2.13, that could be troublesome in the presence of sequences of arc pulses with variable duration.
5. Radio Communication System (RCS) Disturbance
- The GSM-R is the bespoke GSM protocol adapted for railway signalling, using two reserved frequency bands at the margin of the commercial band, namely 873 MHz to 876 MHz and 918 MHz to 921 MHz for up-link and down-link, respectively [124]; the GSM-R is the data carrier for the European Train Control System protocol, implementing at the various levels voice and data transmission; the bandwidth of the single channel is 200 kHz and the used modulation is GMSK ensuring a data rate up to 172 kbps, quite slow if compared to the more modern LTE-R.
- The Terrestrial Trunked Radio (TETRA) is a two-way mobile radio system extensively used for communication of maintenance staff, emergency coordination, fire squad and police within transportation systems of the metro and light railway transit type (railways operating often with the GSM-R); the emergency services operate over the 380 MHz to 385 MHz and 390 MHz to 395 MHz band, whereas civilian applications besides the remaining space between 385 MHz to 390 MHz and 395 MHz to 400 MHz are usually moved to 410 MHz to 470 MHz and around 900 MHz; the system also uses a TDMA assignment of time slots to users; the communication speed is limited to approximately 7 kbps per slot (half if IP encoding is used).
- The LTE-R (Long-Term Evolution for railways) operates on a wide range of bands, from 450 MHz to GHz, using a much larger bandwidth variable between 1 and 20 MHz and ensuring a quite high data rate that is not symmetric for the up-link (10 Mbps) and down-link (50 Mbps).
- Wireless LAN (WLAN) systems are used instead on a local basis, for instance to implement train-to-wayside communication for both safety and non-safety related functions, such as CCTV, passenger information, train control (the Communications-Based Train Control, CBTC, is based on a WLAN protocol). Interference from commercial systems operating in the same GHz and 5 GHz bands may occur (even as simply overloading causing a flood of packet rejections), so that there are implementations using a frequency offset of some hundreds MHz. Performances are those known for the commercial applications, not dissimilar from those of the LTE.
5.1. Electromagnetic Field Estimate at the RCS
5.2. Characteristics of the Electric Arc Transients and Interference to the RCS
5.2.1. Amplitude Probability Distribution (APD)
5.2.2. Bit Error Probability with Impulsive Noise Sources
- taking the power of each source and the total power , the single ICFs for each source are adjusted for the relevance of the noise source:
- for the purpose of quantifying the final effect on BEP, under the assumption that the most intense source is the relevant one, the final ICF is determined taking the largest of the adjusted ones:
BEP Simulation
Determination of BEP from APD
Determination of BEP from Measurements
5.2.3. Influence of the Repetition Interval (RI)
- Statistics of the recorded transients are reported in [133], observing that the dispersion of RI values may be quite large and that isolated large values may bias the RI estimate, whilst being not relevant for the evaluation of interference, because they are much larger than the bit time (BT) of RCS like GSM-R; the observed distribution is a long-tail exponential, that reveals the problem of selecting a suitable threshold to calculate statistics like the mean value, standard deviation and inter-quartile range.
- The influence of the repetition interval on the error probability referred to the single bit (BEP) and the entire frame (FEP) was experimentally evaluated in [145], where a complete test bench was also described for the assessment of GSM-R interference from controlled repetitive disturbance signals, such as recorded impulses; the results show a linearly decaying BEP with the RI value in a log-log scale, as expected, with a null FEP thanks to the positive action of the error correcting codes until the combination of low RI values and low SNR values reaches a threshold beyond which the discarded frames increase dramatically for small further reduction of RI and SNR (see Figure 8).
- The repetition frequency has been put in relationship with the relative speed and with the supply voltage between the electrodes; in this case the inter-electrode gap is accurately set and the dependency on the two parameters (speed and voltage) was demonstrated with a significant repeatability in [8]; dispersion of RF values pertaining to the same speed or voltage values is negligible, whereas an approximately quadratic dependency on voltage and inverse quadratic on gap length is observed, as shown in Figure 9.


5.3. Interference to External RCS
6. Electric Arc Detection
6.1. Ultraviolet Emissions
6.2. Image Recognition
6.3. Electromagnetic Emissions
- Gao et al. [38] propose a Hilbert fractal antenna to measure the e.m. emissions of a laboratory electric arc setup, identifying frequencies (at 18 MHz and 60 MHz to 100 MHz in the present case) with significantly larger amplitude and characteristic of the arc phenomenon. The generality of such “characteristic frequencies” is demonstrated by showing that they are related to the arc specific resistance (the arc resistance normalised by its geometry) and the permittivity of air; even changing the inter-electrode gap the resonant characteristic frequency kept almost constant at the said 18 MHz. It is then proposed to exploit such arc signature for arc detection in real conditions.
- Paoletti [39] solves elegantly the problem of the location of the pantograph arc by using two co-located shielded loop antennas, with their plane oriented at with respect to the symmetry axis of the pantograph aligned with the train axis. The azimuthal angular position is found as the solution of a maximisation problem by taking the squared distance-weighted sum of the magnetic-field components measured by the two antennas. The search is one-dimensional, as it is known that the electric arc occurs at the pantograph contact strip. A remarkable accuracy of mm was achieved in a real test at 400 km/h.
- from classification of simple spectral properties (e.g., uncommon harmonic components) to projection in more complex spaces (such as using the S-transform or wavelets [160]) by considering voltage and current waveforms;
- analysis of waveform features during arc occurrence, such as zero-current intervals and jagged voltage profile [37];
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yang, Z.; Xu, P.; Wei, W.; Gao, G.; Zhou, N.; Wu, G. Influence of the Crosswind on the Pantograph Arcing Dynamics. IEEE Trans. Plasma Sci. 2020, 48, 2822–2830. [Google Scholar] [CrossRef]
- Wu, G.; Dong, K.; Xu, Z.; Xiao, S.; Wei, W.; Chen, H.; Li, J.; Huang, Z.; Li, J.; Gao, G.; et al. Pantograph–catenary electrical contact system of high-speed railways: Recent progress, challenges, and outlooks. Railw. Eng. Sci. 2022, 30, 437–467. [Google Scholar] [CrossRef]
- Wang, W.; Wu, G.; Gao, G.; Wang, B.; Zhou, L.; Cui, Y.; Liu, D. Experimental study of electrical characteristics on pantograph arcing. In Proceedings of the 2011 1st International Conference on Electric Power Equipment-Switching Technology, Xi’an, China, 23–27 October 2011. [Google Scholar] [CrossRef]
- Plesca, A.; Dumitrescu, C.; Calistru, C.N. Power collection system for electrical vehicles. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016. [Google Scholar] [CrossRef]
- Wu, G.; Wei, W.; Gao, G.; Wu, J.; Zhou, Y. Evolution of the electrical contact of dynamic pantograph–catenary system. J. Mod. Transp. 2016, 24, 132–138. [Google Scholar] [CrossRef]
- Wei, W.; Wu, J.; Gao, G.; Gu, Z.; Liu, X.; Zhu, G.; Wu, G. Study on Pantograph Arcing in a Laboratory Simulation System by High-Speed Photography. IEEE Trans. Plasma Sci. 2016, 44, 2438–2445. [Google Scholar] [CrossRef]
- Wu, G.; Wu, J.; Wei, W.; Zhou, Y.; Yang, Z.; Gao, G. Characteristics of the Sliding Electric Contact of Pantograph/Contact Wire Systems in Electric Railways. Energies 2017, 11, 17. [Google Scholar] [CrossRef]
- Jin, M.; Hu, M.; Li, H.; Yang, Y.; Liu, W.; Fang, Q.; Liu, S. Experimental Study on the Transient Disturbance Characteristics and Influence Factors of Pantograph–Catenary Discharge. Energies 2022, 15, 5959. [Google Scholar] [CrossRef]
- Kubo, S.; Kato, K. Effect of arc discharge on the wear rate and wear mode transition of a copper-impregnated metallized carbon contact strip sliding against a copper disk. Tribol. Int. 1999, 32, 367–378. [Google Scholar] [CrossRef]
- Ding, T.; Chen, G.X.; Bu, J.; Zhang, W.H. Effect of temperature and arc discharge on friction and wear behaviours of carbon strip/copper contact wire in pantograph–catenary systems. Wear 2011, 271, 1629–1636. [Google Scholar] [CrossRef]
- Yang, H.; Li, C.; Liu, Y.; Fu, L.; Jiang, G.; Cui, X.; Hu, B.; Wang, K. Study on the delamination wear and its influence on the conductivity of the carbon contact strip in pantograph-catenary system under high-speed current-carrying condition. Wear 2021, 477, 203823. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, C.; Pang, X.; Song, C.; Ni, F.; Zhang, Y. Evolution processes of the tribological properties in pantograph/catenary system affected by dynamic contact force during current-carrying sliding. Wear 2021, 477, 203809. [Google Scholar] [CrossRef]
- Li, S.; Yang, X.; Kang, Y.; Li, Z.; Li, H. Progress on Current-Carry Friction and Wear: An Overview from Measurements to Mechanism. Coatings 2022, 12, 1345. [Google Scholar] [CrossRef]
- Klapas, D.; Hackam, R.; Beanson, F. Electric arc power collection for high-speed trains. Proc. IEEE 1976, 64, 1699–1715. [Google Scholar] [CrossRef]
- Lee, C.Y.; Huang, C.H.; Lin, H.E.; Lin, J.Y.; Yu, S.P.; Yang, Y.L.; Huang, H.H. Modelling on the synergy of mechanical and electrical wear in a current line/catenary-pantograph system. J. Phys. Conf. Ser. 2022, 2345, 012001. [Google Scholar] [CrossRef]
- Bucca, G.; Collina, A. Electromechanical interaction between carbon-based pantograph strip and copper contact wire: A heuristic wear model. Tribol. Int. 2015, 92, 47–56. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, P.; Verhoeven, J.; Gibson, E. Electrotribological behavior of Cu-15 vol.% Cr in situ composites under dry sliding. Wear 1997, 203–204, 28–35. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Yan, Y.; Qiao, L. Effect of electrical current on tribological behavior of copper-impregnated metallized carbon against a Cu–Cr–Zr alloy. Tribol. Int. 2012, 50, 26–34. [Google Scholar] [CrossRef]
- Midya, S.; Bormann, D.; Schutte, T.; Thottappillil, R. Pantograph Arcing in Electrified Railways—Mechanism and Influence of Various Parameters—Part I: With DC Traction Power Supply. IEEE Trans. Power Deliv. 2009, 24, 1931–1939. [Google Scholar] [CrossRef]
- Midya, S.; Bormann, D.; Schutte, T.; Thottappillil, R. Pantograph Arcing in Electrified Railways—Mechanism and Influence of Various Parameters—Part II: With AC Traction Power Supply. IEEE Trans. Power Deliv. 2009, 24, 1940–1950. [Google Scholar] [CrossRef]
- Mariscotti, A. Characterization of Power Quality transient phenomena of DC railway traction supply. ACTA IMEKO 2012, 1, 26. [Google Scholar] [CrossRef][Green Version]
- Crotti, G.; Giordano, D.; Roccato, P.; Femine, A.D.; Gallo, D.; Landi, C.; Luiso, M.; Mariscotti, A. Pantograph-to-OHL Arc: Conducted Effects in DC Railway Supply System. In Proceedings of the 2018 IEEE 9th International Workshop on Applied Measurements for Power Systems (AMPS), Bologna, Italy, 26–28 September 2018. [Google Scholar] [CrossRef]
- Mariscotti, A.; Giordano, D.; Femine, A.D.; Gallo, D.; Signorino, D. How Pantograph Electric Arcs affect Energy Efficiency in DC Railway Vehicles. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 18 November–16 December 2020. [Google Scholar] [CrossRef]
- Li, T.; Wu, G.; Zhou, L.; Gao, G.; Wang, W.; Wang, B.; Liu, D.; Li, D. Pantograph Arcing Impact on Locomotive Equipments. In Proceedings of the 2011 IEEE 57th Holm Conference on Electrical Contacts (Holm), Minneapolis, MN, USA, 11–14 September 2011. [Google Scholar] [CrossRef]
- Pefia-Eguiluz, R. Pantograph detachment perturbation on a railway traction system. In Proceedings of the 8th International Conference on Power Electronics and Variable Speed Drives, Minneapolis, MN, USA, 11–14 September 2011. [Google Scholar] [CrossRef]
- Mariscotti, A.; Giordano, D. Experimental Characterization of Pantograph Arcs and Transient Conducted Phenomena in DC Railways. ACTA IMEKO 2020, 9, 10. [Google Scholar] [CrossRef]
- Midya, S.; Bormann, D.; Mazloom, Z.; Schutte, T.; Thottappillil, R. Conducted and radiated emission from pantograph arcing in AC traction system. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 2 October 2009. [Google Scholar] [CrossRef]
- Guo, F.; Wang, Z.; Zheng, Z.; Zhang, J.; Wang, H. Electromagnetic noise of pantograph arc under low current conditions. Int. J. Appl. Electromagn. Mech. 2017, 53, 397–408. [Google Scholar] [CrossRef]
- Stenumgaard, P. Using the root-mean-square detector for weighting of disturbances according to its effect on digital communication services. IEEE Trans. Electromagn. Compat. 2000, 42, 368–375. [Google Scholar] [CrossRef]
- Stenumgaard, P. A simple impulsiveness correction factor for control of electromagnetic interference in dynamic wireless applications. IEEE Commun. Lett. 2006, 10, 147–149. [Google Scholar] [CrossRef]
- Wiklundh, K. Relation Between the Amplitude Probability Distribution of an Interfering Signal and its Impact on Digital Radio Receivers. IEEE Trans. Electromagn. Compat. 2006, 48, 537–544. [Google Scholar] [CrossRef]
- Matsumoto, Y. On the Relation Between the Amplitude Probability Distribution of Noise and Bit Error Probability. IEEE Trans. Electromagn. Compat. 2007, 49, 940–941. [Google Scholar] [CrossRef]
- Pous, M.; Silva, F. APD radiated transient measurements produced by electric sparks employing time-domain captures. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Gothenburg, Sweden, 1–4 September 2014. [Google Scholar] [CrossRef]
- Pous, M.; Azpurua, M.A.; Silva, F. Measurement and Evaluation Techniques to Estimate the Degradation Produced by the Radiated Transients Interference to the GSM System. IEEE Trans. Electromagn. Compat. 2015, 57, 1382–1390. [Google Scholar] [CrossRef]
- Tengstrand, S.O.; Axell, E.; Fors, K.; Linder, S.; Wiklundh, K. Efficient evaluation of communication system performance in complex interference situations. In Proceedings of the 2017 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Angers, France, 4–7 September 2017. [Google Scholar] [CrossRef]
- Eliardsson, P.; Axell, E.; Komulainen, A.; Wiklundh, K.; Tengstrand, S.O. A Practical Method for BEP Estimation of Convolutional Coding in Impulse Noise Environments. In Proceedings of the IEEE Military Communications Conference (MILCOM), Norfolk, VA, USA, 12–14 November 2019. [Google Scholar] [CrossRef]
- Mochizuka, H.; Kusumi, S.; Nagasawa, H. New Detection Method for Contact Loss of Pantograph. Q. Rep. RTRI 2000, 41, 173–176. [Google Scholar] [CrossRef][Green Version]
- Gao, G.; Yan, X.; Yang, Z.; Wei, W.; Hu, Y.; Wu, G. Pantograph–Catenary Arcing Detection Based on Electromagnetic Radiation. IEEE Trans. Electromagn. Compat. 2019, 61, 983–989. [Google Scholar] [CrossRef]
- Paoletti, U. Direction Finding Techniques in Reactive Near Field of Impulsive Electromagnetic Noise Source Aiming at Pantograph Arcing Localization. IEEE Sens. J. 2019, 19, 4193–4200. [Google Scholar] [CrossRef]
- Bruno, O.; Landi, A.; Papi, M.; Sani, L. Phototube sensor for monitoring the quality of current collection on overhead electrified railways. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2001, 215, 231–241. [Google Scholar] [CrossRef]
- Barmada, S.; Raugi, M.; Tucci, M.; Romano, F. Arc detection in pantograph-catenary systems by the use of support vector machines-based classification. IET Electr. Syst. Transp. 2014, 4, 45–52. [Google Scholar] [CrossRef]
- Aydin, I.; Karaköse, M.; Akin, E. A new contactless fault diagnosis approach for pantograph-catenary system. In Proceedings of the 15th International Conference MECHATRONIKA, Prague, Czech Republic, 5–7 December 2012. [Google Scholar]
- Huang, S.; Yu, L.; Zhang, F.; Zhu, W.; Guo, Q. Cluster Analysis Based Arc Detection in Pantograph-Catenary System. J. Adv. Transp. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Huang, S.; Chen, W.; Sun, B.; Tao, T.; Yang, L. Arc Detection and Recognition in the Pantograph-Catenary System Based on Multi-Information Fusion. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 229–240. [Google Scholar] [CrossRef]
- Steinmetz, C.P. Transformation of Electric Power into Light. Trans. Am. Inst. Electr. Eng. 1906, XXV, 789–813. [Google Scholar] [CrossRef]
- Slepian, J. Extinction of a Long A-C Arc. Trans. Am. Inst. Electr. Eng. 1930, 49, 421–430. [Google Scholar] [CrossRef]
- Browne, T.E. Extinction of Short A-C Arcs. Trans. Am. Inst. Electr. Eng. 1931, 50, 1461–1464. [Google Scholar] [CrossRef]
- Cassie, A.M. Theorie Nouvelle des Arcs de Rupture et de la Rigidité des Circuits. CIGRE 1939, 102, 588–608. [Google Scholar]
- Slepian, J.; Browne, T.E. Photographic study of A-C arcs in flowing liquids. Electr. Eng. 1941, 60, 823–828. [Google Scholar] [CrossRef]
- Slepian, J. Displacement and diffusion in fluid-flow arc extinction. Electr. Eng. 1941, 60, 162–167. [Google Scholar] [CrossRef]
- Mayr, O. Beitrage zur theorie des statischen und des dynamischen lichtbogens. Electr. Eng. Arch. Elektrotech. 1943, 37, 588–608. [Google Scholar] [CrossRef]
- Browne, T.E. A Study of A-C Arc Behavior Near Current Zero by Means or Mathematical Models. Trans. Am. Inst. Electr. Eng. 1948, 67, 141–153. [Google Scholar] [CrossRef]
- Schwarz, J. Dynamisches verhalten eines gasbeblasenen, turbulenzbestimmten schaltlichtbogens. ETZ-Archiv 1971, 92, 389–391. [Google Scholar]
- Habedank, U. On the Mathematical Description of Arc Behaviour in the Vicinity of Current Zero. ETZ-Archiv 1988, 10, 339–343. [Google Scholar]
- Mauriello, A.; Clarke, J. Measurement and Analysis of Radiated Electromagnetic Emissions from Rail-Transit Vehicles. IEEE Trans. Electromagn. Compat. 1983, EMC-25, 405–411. [Google Scholar] [CrossRef]
- Ammerman, R.F.; Sen, P. Modeling High-Current Electrical Arcs: A Volt-Ampere Characteristic Perspective for AC and DC Systems. In Proceedings of the 2007 39th North American Power Symposium, Las Cruces, NM, USA, 30 September–2 October 2007. [Google Scholar] [CrossRef]
- Wright, D.; Delmont, P.; Torrilhon, M. Modeling of electric arcs: A study of the non-convective case with strong coupling. J. Plasma Phys. 2013, 79, 699–713. [Google Scholar] [CrossRef]
- Li, J.; Yuan, H.; Xu, M.; Tian, F.; Wang, Z.; Ren, J. Research on Improved Schwarz Arc Model Considering Dynamic Arc Length. J. Electr. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Terzija, V.; Koglin, H.J. On the Modeling of Long Arc in Still Air and Arc Resistance Calculation. IEEE Trans. Power Deliv. 2004, 19, 1012–1017. [Google Scholar] [CrossRef]
- Goda, Y.; Iwata, M.; Ikeda, K.; Tanaka, S. Arc voltage characteristics of high current fault arcs in long gaps. IEEE Trans. Power Deliv. 2000, 15, 791–795. [Google Scholar] [CrossRef]
- Nottingham, W.B. A New Equation for the Static Characteristic of the Normal Electric Arc. Trans. Am. Inst. Electr. Eng. 1923, XLII, 302–310. [Google Scholar] [CrossRef]
- Browne, T.E. The Electric Arc as a Circuit Element. J. Electrochem. Soc. 1955, 102, 27. [Google Scholar] [CrossRef]
- Fisher, L.E. Resistance of Low-Voltage AC Arcs. IEEE Trans. Ind. Gen. Appl. 1970, IGA-6, 607–616. [Google Scholar] [CrossRef]
- Stokes, A.D.; Oppenlander, W.T. Electric arcs in open air. J. Phys. Appl. Phys. 1991, 24, 26–35. [Google Scholar] [CrossRef]
- Van, A.R.; Warrington, C. Reactance relays negligibly affected by arc impedance. Electr. World 1931, 1931, 502–505. [Google Scholar]
- Andrade, V.D.; Sorrentino, E. Typical expected values of the fault resistance in power systems. In Proceedings of the 2010 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, Sao Paulo, Brazi, 8–10 November 2010. [Google Scholar] [CrossRef]
- Pessoa, F.P.; Acosta, J.S.; Tavares, M.C. Parameter estimation of DC black-box arc models using genetic algorithms. Electr. Power Syst. Res. 2021, 198, 107322. [Google Scholar] [CrossRef]
- Trelles, J.P.; Chazelas, C.; Vardelle, A.; Heberlein, J.V.R. Arc Plasma Torch Modeling. J. Therm. Spray Technol. 2009, 18, 728–752. [Google Scholar] [CrossRef]
- Wu, Z.; Wu, G.; Dapino, M.; Pan, L.; Ni, K. Model for Variable-Length Electrical Arc Plasmas Under AC Conditions. IEEE Trans. Plasma Sci. 2015, 43, 2730–2737. [Google Scholar] [CrossRef]
- Sawicki, A.; Haltof, M. Mathematical models of electric arc with variable plasma column length used for simulations of processes in gliding arc plasmatrons. Prz. Elektrotech. 2016, 1, 195–198. [Google Scholar] [CrossRef][Green Version]
- Sawicki, A. Problems of modeling an electrical arc with variable geometric dimensions. Prz. Elektrotech. 2013, 89, 270–275. [Google Scholar]
- Park, K.H.; Lee, H.Y.; Asif, M.; Lee, B.W. Parameter identification of dc black-box arc model using non-linear least squares. J. Eng. 2018, 2019, 2202–2206. [Google Scholar] [CrossRef]
- Jalil, M.; Samet, H.; Ghanbari, T. Time-Variant Schwarz Based Model for DC Series Arc Fault Modeling in Photovoltaic Systems. IEEE J. Photovolt. 2022, 12, 1078–1089. [Google Scholar] [CrossRef]
- Guardado, J.; Maximov, S.; Melgoza, E.; Naredo, J.; Moreno, P. An Improved Arc Model Before Current Zero Based on the Combined Mayr and Cassie Arc Models. IEEE Trans. Power Deliv. 2005, 20, 138–142. [Google Scholar] [CrossRef]
- Habedank, U. Application of a new arc model for the evaluation of short-circuit breaking tests. IEEE Trans. Power Deliv. 1993, 8, 1921–1925. [Google Scholar] [CrossRef]
- Tseng, K.J.; Wang, Y.; Vilathgamuwa, D. An experimentally verified hybrid Cassie-Mayr electric arc model for power electronics simulations. IEEE Trans. Power Electron. 1997, 12, 429–436. [Google Scholar] [CrossRef]
- Dai, J.; Hao, R.; You, X.; Sun, H.; Huang, X.; Li, Y. Modeling of plasma arc for the high power arc heater in MATLAB. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010. [Google Scholar] [CrossRef]
- Schavemaker, P.; van der Slui, L. An improved Mayr-type arc model based on current-zero measurements [circuit breakers]. IEEE Trans. Power Deliv. 2000, 15, 580–584. [Google Scholar] [CrossRef]
- Smeets, R.; Kertesz, V. Evaluation of high-voltage circuit breaker performance with a new validated arc model. IEE Proc. Gener. Transm. Distrib. 2000, 147, 121. [Google Scholar] [CrossRef]
- Rashtchi, V.; Lotfi, A.; Mousavi, A. Identification of KEMA arc model parameters in high voltage circuit breaker by using of genetic algorithm. In Proceedings of the 2008 IEEE 2nd International Power and Energy Conference, Johor Bahru, Malaysia, 1–3 December 2008. [Google Scholar] [CrossRef]
- Khakpour, A.; Franke, S.; Uhrlandt, D.; Gorchakov, S.; Methling, R.P. Electrical Arc Model Based on Physical Parameters and Power Calculation. IEEE Trans. Plasma Sci. 2015, 43, 2721–2729. [Google Scholar] [CrossRef]
- Khakpour, A.; Franke, S.; Gortschakow, S.; Uhrlandt, D.; Methling, R.; Weltmann, K.D. An Improved Arc Model Based on the Arc Diameter. IEEE Trans. Power Deliv. 2016, 31, 1335–1341. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Mu, X.; Huang, K.; Wang, H.; Gao, S. An Extended Habedank’s Equation-Based EMTP Model of Pantograph Arcing Considering Pantograph-Catenary Interactions and Train Speeds. IEEE Trans. Power Deliv. 2016, 31, 1186–1194. [Google Scholar] [CrossRef]
- Amirdehi, S.; Trajin, B.; Vidal, P.E.; Vally, J.; Colin, D.; Rotella, F. Pantographs bounce modelling for the simulation of railway systems. In Proceedings of the PCIM Europe 2019—International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nürnberg, Deutschland, 7–9 May 2019. [Google Scholar]
- Li, X.; Pan, C.; Luo, D.; Sun, Y. Series DC Arc Simulation of Photovoltaic System Based on Habedank Model. Energies 2020, 13, 1416. [Google Scholar] [CrossRef]
- Ju, M.; Wang, L. Arc fault modeling and simulation in DC system based on Habedank model. In Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu), Chengdu, China, 19–21 October 2016. [Google Scholar] [CrossRef]
- He, J.; Wang, K.; Li, J. Application of an Improved Mayr-Type Arc Model in Pyro-Breakers Utilized in Superconducting Fusion Facilities. Energies 2021, 14, 4383. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, M.; Chen, B.; Yang, G. Modeling and simulation analysis of arc in distribution network. Dianli Xitong Baohu Yu Kongzhi/Power Syst. Prot. Control 2015, 43, 57–64. [Google Scholar]
- Berger, S. Modell zur Berechnung des Dynamischenelektrischen Verhaltens rasch Verlängerter Lichtbögen. Ph.D. Thesis, ETH Zürich, Zürich, Switzerland, 2009. [Google Scholar]
- Sawicki, A. Modele łuku elektrycznego o sterowanej długości. Wiad. Elektrotech. 2012, 7, 15–19. [Google Scholar]
- Sawicki, A. Modelowanie łuku elektrycznego o zmiennychrozmiarach geometrycznych. Zesz. Nauk. Politech. 2012, 124, 202–214. [Google Scholar]
- Yuan, L.; Sun, L.; Wu, H. Simulation of Fault Arc Using Conventional Arc Models. Energy Power Eng. 2013, 5, 833–837. [Google Scholar] [CrossRef]
- Bucca, G.; Collina, A.; Manigrasso, R.; Mapelli, F.; Tarsitano, D. Analysis of electrical interferences related to the current collection quality in pantograph–catenary interaction. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2011, 225, 483–500. [Google Scholar] [CrossRef]
- Wu, G.; Gao, G.; Wei, W.; Yang, Z. The Electrical Contact of the Pantograph-Catenary System—Theory and Application; Springer: Berlin, Germany, 2019. [Google Scholar] [CrossRef]
- Mei, G.; Song, Y. Effect of Overhead Contact Line Pre-Sag on the Interaction Performance with a Pantograph in Electrified Railways. Energies 2022, 15, 6875. [Google Scholar] [CrossRef]
- Montgomery, R.W.; Sharp, C.M.H. The effect of cathode geometry on the stability of arcs. J. Phys. D Appl. Phys. 1969, 2, 1345–1348. [Google Scholar] [CrossRef]
- Spink, H.C.; Guile, A.E. The Movement of High-Current Arcs in Transverse External and Self-Magnetic Fields in Air at Atmospheric Pressure; Technical Report 777; University of Leeds: Leeds, UK, 1965. [Google Scholar]
- Mariscotti, A.; Pozzobon, P. Synthesis of line impedance expressions for railway traction systems. IEEE Trans. Veh. Technol. 2003, 52, 420–430. [Google Scholar] [CrossRef]
- Signorino, D.; Giordano, D.; Mariscotti, A.; Gallo, D.; Femine, A.D.; Balic, F.; Quintana, J.; Donadio, L.; Biancucci, A. Dataset of measured and commented pantograph electric arcs in DC railways. Data Brief 2020, 31, 105978. [Google Scholar] [CrossRef]
- Kurokawa, S.; Pissolato, J.; Tavares, M.; Portela, C.; Prado, A. A New Procedure to Derive Transmission-Line Parameters: Applications and Restrictions. IEEE Trans. Power Deliv. 2006, 21, 492–498. [Google Scholar] [CrossRef]
- Liu, Q.; Wu, M.; Zhang, J.; Song, K.; Wu, L. Resonant frequency identification based on harmonic injection measuring method for traction power supply systems. IET Power Electron. 2018, 11, 585–592. [Google Scholar] [CrossRef]
- Mariscotti, A.; Sandrolini, L. Detection of Harmonic Overvoltage and Resonance in AC Railways Using Measured Pantograph Electrical Quantities. Energies 2021, 14, 5645. [Google Scholar] [CrossRef]
- Ferrari, P.; Mariscotti, A.; Pozzobon, P. Reference curves of the pantograph impedance in DC railway systems. In Proceedings of the IEEE International Symposium on Circuits and Systems, Geneva, Switzerland, 28–31 May 2000. [Google Scholar] [CrossRef]
- Bongiorno, J.; Mariscotti, A. Variability of pantograph impedance curves in DC traction systems and comparison with experimental results. Prz. Elektrotech. 2014, 178–183. [Google Scholar] [CrossRef]
- Mariscotti, A. Impact of rail impedance intrinsic variability on railway system operation, EMC and safety. Int. J. Electr. Comput. Eng. 2021, 11, 17. [Google Scholar] [CrossRef]
- Lin, F.; Wang, X.; Yang, Z.; Sun, H.; Liu, W.; Hao, R.; Jiao, J.; Yu, J. Analysis of electrical characteristics of the four-quadrant converter in high speed train considering pantograph-catenary arcing. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 231, 185–197. [Google Scholar] [CrossRef]
- Nicolae, P.M.; Nicolae, M.S.; Nicolae, I.D.; Netoiu, A. Overvoltages Induced in the Supplying Line by an Electric Railway Vehicle. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021. [Google Scholar] [CrossRef]
- Berleze, S.; Robert, R. Skin and proximity effects in nonmagnetic conductors. IEEE Trans. Educ. 2003, 46, 368–372. [Google Scholar] [CrossRef]
- Mariscotti, A.; Pozzobon, P. Measurement of the Internal Impedance of Traction Rails at Audiofrequency. IEEE Trans. Instrum. Meas. 2004, 53, 792–797. [Google Scholar] [CrossRef]
- Sippola, M.; Sepponen, R. Accurate prediction of high-frequency power-transformer losses and temperature rise. IEEE Trans. Power Electron. 2002, 17, 835–847. [Google Scholar] [CrossRef]
- Liu, Y.J.; Chang, G.W.; Huang, H.M. Mayr’s Equation-Based Model for Pantograph Arc of High-Speed Railway Traction System. IEEE Trans. Power Deliv. 2010, 25, 2025–2027. [Google Scholar] [CrossRef]
- Mariscotti, A.; Giordano, D.; Femine, A.D.; Signorino, D. Filter Transients onboard DC Rolling Stock and Exploitation for the Estimate of the Line Impedance. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020. [Google Scholar] [CrossRef]
- D’Antona, G.; Brenna, M.; Manta, N. Modeling and measurement of the voltage transients at the phase to phase changeover section of the Italian High Speed railway system. In Proceedings of the IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 26–28 September 2012. [Google Scholar] [CrossRef]
- Jiang, X.; He, Z.; Hu, H.; Zhang, Y. Analysis of the Electric Locomotives Neutral-section Passing Harmonic Resonance. Energy Power Eng. 2013, 5, 546–551. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, C.; Sun, X.; Xing, T.; Chen, L.; Liu, S. Measurement and Analysis of Electrical Behaviors of Offline Discharge Between High-Speed Contact Wire and Pantograph of Locomotive. IEEE Trans. Instrum. Meast. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Li, X.; Zhu, F.; Lu, H.; Qiu, R.; Tang, Y. Longitudinal Propagation Characteristic of Pantograph Arcing Electromagnetic Emission With High-Speed Train Passing the Articulated Neutral Section. IEEE Trans. Electromagn. Compat. 2019, 61, 319–326. [Google Scholar] [CrossRef]
- Klapas, D.; Apperley, R.; Hackam, R.; Benson, F. Electromagnetic Interference from Electric Arcs in the Frequency Range 0.1-1000 MHz. IEEE Trans. Electromagn. Compat. 1978, 20, 198–202. [Google Scholar] [CrossRef]
- MIL STD 462; Measurement of Electromagnetic Interference Characteristics. Department of Defense of the United States of America: Washington, DC, USA, 1993.
- Boschetti, G.; Mariscotti, A.; Deniau, V. Assessment of the GSM-R susceptibility to repetitive transient disturbance. Measurement 2012, 45, 2226–2236. [Google Scholar] [CrossRef]
- Mariscotti, A.; Deniau, V. On the characterization of pantograph arc transients on GSM-R antenna. In Proceedings of the 17th Symposium IMEKO TC4—Measurement of Electrical Quantities, Kosice, Slovakia, 8–10 September 2010; pp. 155–160. [Google Scholar]
- Mariscotti, A. RF and Microwave Measurements, 1st ed.; ASTM: West Conshohocken, PA, USA, 2015. [Google Scholar]
- Tang, Y.; Zhu, F.; Chen, Y. Analysis of EMI from Pantograph-catenary Arc on Speed Sensor Based on the High-speed Train Model. ACES J. 2021, 36, 205–212. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhu, F.; Lu, N.; Wang, Z.; Zhuang, S. Research on the Characteristics of the Pantograph Arc and Analyzing its Influence on the ILS. Appl. Comput. Electromagn. Soc. J. 2022, 37, 639–647. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Wang, G.; Guan, K.; Zhong, Z.; Molisch, A.F.; Briso-Rodriguez, C.; Oestges, C.P. High-Speed Railway Communications: From GSM-R to LTE-R. IEEE Veh. Technol. Mag. 2016, 11, 49–58. [Google Scholar] [CrossRef]
- Gill, K.S.; Ferreira, P.V.R.; Wyglinski, A.M. Performance Analysis of High Speed Trains Communications inside a Tunnel Using LTE-R. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017. [Google Scholar] [CrossRef]
- Hammi, T.; Slimen, N.B.; Deniau, V.; Rioult, J.; Dudoyer, S. Comparison between GSM-R coverage level and EM noise level in railway environment. In Proceedings of the 2009 9th International Conference on Intelligent Transport Systems Telecommunications (ITST), Lille, France, 20–22 October 2009. [Google Scholar] [CrossRef]
- Dudoyer, S.; Deniau, V.; Ambellouis, S.; Heddebaut, M.; Mariscotti, A. Classification of Transient EM Noises Depending on their Effect on the Quality of GSM-R Reception. IEEE Trans. Electromagn. Compat. 2013, 55, 867–874. [Google Scholar] [CrossRef]
- Ma, L. The Radiated Characteristics of Pantograph Arcing in High-Speed Railway. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2017. [Google Scholar]
- Heddebaut, M.; Deniau, V.; Rioult, J. Wideband analysis of railway catenary line radiation and new applications of its unintentional emitted signals. Meas. Sci. Technol. 2018, 29, 065101. [Google Scholar] [CrossRef]
- Mariscotti, A.; Marrese, A.; Pasquino, N.; Moriello, R.S.L. Time and frequency characterization of radiated disturbance in telecommunication bands due to pantograph arcing. Measurement 2013, 46, 4342–4352. [Google Scholar] [CrossRef]
- Ma, L.; Wen, Y.; Marvin, A.; Karadimou, E.; Armstrong, R.; Cao, H. A Novel Method for Calculating the Radiated Disturbance From Pantograph Arcing in High-Speed Railway. IEEE Trans. Veh. Technol. 2017, 66, 8734–8745. [Google Scholar] [CrossRef]
- Mariscotti, A. Critical Review of EMC Standards for the Measurement of Radiated Electromagnetic Emissions from Transit Line and Rolling Stock. Energies 2021, 14, 759. [Google Scholar] [CrossRef]
- Mariscotti, A.; Marrese, A.; Pasquino, N. Time and frequency characterization of radiated disturbances in telecommunication bands due to pantograph arcing. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012. [Google Scholar] [CrossRef]
- Ma, L.; Marvin, A.; Karadimou, E.; Armstrong, R.; Wen, Y. An experimental programme to determine the feasibility of using a reverberation chamber to measure the total power radiated by an arcing pantograph. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Gothenburg, Sweden, 1–4 September 2014. [Google Scholar] [CrossRef]
- Matsumoto, Y.; Gotoh, K. An Expression for Maximum Bit Error Probability Using the Amplitude Probability Distribution of an Interfering Signal and Its Application to Emission Requirements. IEEE Trans. Electromagn. Compat. 2013, 55, 983–986. [Google Scholar] [CrossRef]
- Pous, M.; Silva, F. Full-Spectrum APD Measurement of Transient Interferences in Time Domain. IEEE Trans. Electromagn. Compat. 2014, 56, 1352–1360. [Google Scholar] [CrossRef]
- Pous, M.; Azpurua, M.A.; Silva, F. APD oudoors time-domain measurements for impulsive noise characterization. In Proceedings of the International Symposium on Electromagnetic Compatibility—EMC EUROPE, Angers, France, 4–7 September 2017. [Google Scholar] [CrossRef]
- Chiyojima, T. Introduction of the amplitude probability distribution (APD) measurement in CISPR 32. In Proceedings of the 2019 Joint International Symposium on Electromagnetic Compatibility, Sapporo and Asia-Pacific International Symposium on Electromagnetic Compatibility (EMC Sapporo/APEMC), Sapporo, Japan, 3–7 June 2019. [Google Scholar] [CrossRef]
- CISPR 16-1-1; Specification for Radio Disturbance and Immunity Measuring Apparatus and Methods—Part 1-1: Radio Disturbance and Immunity Measuring Apparatus—Measuring Apparatus. IEC: Geneva, Switzerland, 2015.
- Pous, M.; Azpurua, M.; Zhao, D.; Wolf, J.; Silva, F. Novel EMI Assessment Method Based on Statistical Detectors to Protect Sensitive Digital Radio Receivers. In Proceedings of the 2022 ESA Workshop on Aerospace EMC (Aerospace EMC), Virtual, 23–25 May 2022. [Google Scholar] [CrossRef]
- Wiklundh, K. Bandwidth conversion of the amplitude probability distribution foremission requirements of pulse modulated interference. IEEE Trans. Electromagn. Compat. 2005, 48, 537–544. [Google Scholar] [CrossRef]
- Miyamoto, S.; Katayama, M.; Morinaga, N. Performance analysis of QAM systems under class A impulsive noise environment. IEEE Trans. Electromagn. Compat. 1995, 37, 260–267. [Google Scholar] [CrossRef]
- Fors, K.M.; Wiklundh, K.C.; Stenumgaard, P.F. A Simple Measurement Method to Derive the Impulsiveness Correction Factor for Communication Performance Estimation. IEEE Trans. Electromagn. Compat. 2013, 55, 834–841. [Google Scholar] [CrossRef]
- Romero, G.; Simon, E.P.; Deniau, V.; Gransart, C.; Kousri, M. Evaluation of an IEEE 802.11n communication system in presence of transient electromagnetic interferences from the pantograph-catenary contact. In Proceedings of the 2017 XXXIInd General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Montreal, QC, Canada, 19–26 August 2017. [Google Scholar] [CrossRef]
- Deniau, V.; Dudoyer, S.; Heddebaut, M.; Mariscotti, A.; Marrese, A.; Pasquino, N. Test bench for the evaluation of GSM-R operation in the presence of electric arc interference. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 16–18 October 2012. [Google Scholar] [CrossRef]
- Geng, X.; Wen, Y.; Zhang, J.; Zhang, D. A Method to Supervise the Effect on Railway Radio Transmission of Pulsed Disturbances Based on Joint Statistical Characteristics. Appl. Sci. 2020, 10, 4814. [Google Scholar] [CrossRef]
- Tang, Y.; Zhu, F.; Chen, Y. For More Reliable Aviation Navigation: Improving the Existing Assessment of Airport Electromagnetic Environment. IEEE Instrum. Meas. Mag. 2021, 24, 104–112. [Google Scholar] [CrossRef]
- Fei, S.; Zhongyong, J.; Shouning, J. Case study: Prediction of RFI effects of electrified railways on aeronautical radio navigation stations. In Proceedings of the International Symposium on Electromagnetic Compatibility ELMAGC-97, Beijing, China, 21–23 May 1997. [Google Scholar] [CrossRef]
- CISPR 12; Vehicles, Boats and Internal Combustion Engines—Radio Disturbance Characteristics—Limits and Methods of Measurementfor the Protection of Off-Board Receivers. IEC: Geneva, Switzerland, 2009.
- Geise, R.; Kerfin, O.; Neubauer, B.; Zimmer, G.; Enders, A. EMC analysis including receiver characteristics - pantograph arcing and the instrument landing system. In Proceedings of the 2015 IEEE International Symposium on Electromagnetic Compatibility (EMC), Dresden, Germany, 16–22 August 2015. [Google Scholar] [CrossRef]
- Tang, Y.; Zhu, F.; Chen, Y. Research on the Influence of Train Speed Change on the EMI of Pantograph-Catenary Arc to Main Navigation Stations. Appl. Comput. Electromagn. Soc. 2021, 36, 450–457. [Google Scholar] [CrossRef]
- CENELEC EN 50367; Railway Applications—Current Collection Systems—Technical Criteria for the Interaction between Pantograph and Overhead Line (to Achieve Free Access). Technical Report; CENELEC: Paris, France, 2016.
- Boffi, P.; Cattaneo, G.; Amoriello, L.; Barberis, A.; Bucca, G.; Bocciolone, M.F.; Collina, A.; Martinelli, M. Optical Fiber Sensors to Measure Collector Performance in the Pantograph-Catenary Interaction. IEEE Sens. J. 2009, 9, 635–640. [Google Scholar] [CrossRef]
- Giordano, D.; Clarkson, P.; Gamacho, F.; van den Brom, H.; Donadio, L.; Fernandez-Cardador, A.; Spalvieri, C.; Gallo, D.; Istrate, D.; Laporte, A.D.S.; et al. Accurate Measurements of Energy, Efficiency and Power Quality in the Electric Railway System. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018. [Google Scholar] [CrossRef]
- Becerra, M.; Piva, D.; Gati, R.; Dominguez, G. On the optical radiation of ablation dominated arcs in air. In Proceedings of the 19th Symposium on Physics of Switching Arc, Brno, Czech Republic, 5–9 September 2011; pp. 113–116. [Google Scholar]
- Ma, L.; Wang, Z.Y.; Gao, X.R.; Wang, L.; Yang, K. Edge Detection on Pantograph Slide Image. In Proceedings of the 2009 2nd International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009. [Google Scholar] [CrossRef]
- Aydin, I.; Yaman, O.; Karakose, M.; Celebi, S.B. Particle swarm based arc detection on time series in pantograph-catenary system. In Proceedings of the 2014 IEEE International Symposium on Innovations in Intelligent Systems and Applications (INISTA) Proceedings, Alberobello, Italy, 23–25 June 2014. [Google Scholar] [CrossRef]
- Yaman, O.; Karakose, M.; Aydin, I.; Akin, E. Image processing and model based arc detection in pantograph catenary systems. In Proceedings of the 2014 22nd Signal Processing and Communications Applications Conference (SIU), Trabzon, Turkey, 23–25 April 2014. [Google Scholar] [CrossRef]
- Yu, L.; Huang, S.; Zhang, F.; Li, G. Research on the Arc Image Recognition Based on the Pantograph Videos of High-Speed Electric Multiple Unit (EMU). In International Symposium for Intelligent Transportation and Smart City (ITASC) 2017 Proceedings; Springer: Singapore, 2017; pp. 290–301. [Google Scholar] [CrossRef]
- Karakose, E.; Gencoglu, M.T.; Karakose, M.; Yaman, O.; Aydin, I.; Akin, E. A new arc detection method based on fuzzy logic using S-transform for pantograph–catenary systems. J. Intell. Manuf. 2015, 29, 839–856. [Google Scholar] [CrossRef]
- Seferi, Y.; Blair, S.M.; Mester, C.; Stewart, B.G. A Novel Arc Detection Method for DC Railway Systems. Energies 2021, 14, 444. [Google Scholar] [CrossRef]
- Fan, F.; Wank, A.; Seferi, Y.; Stewart, B.G. Pantograph Arc Location Estimation Using Resonant Frequencies in DC Railway Power Systems. IEEE Trans. Transp. Electrif. 2021, 7, 3083–3095. [Google Scholar] [CrossRef]
- Havryliuk, V. Audio Frequency Track Circuits Monitoring Based on Wavelet Transform and Artificial Neural Network Classifier. In Proceedings of the 2019 IEEE 2nd Ukraine Conference on Electrical and Computer Engineering (UKRCON), Lviv, Ukraine, 2–6 July 2019. [Google Scholar] [CrossRef]
- Li, Z.; Liu, S. Interference mechanism analysis and mitigation measures with railway signalling equipment from harmonics in the traction system. Transp. Saf. Environ. 2020, 2, 271–282. [Google Scholar] [CrossRef]
- Alonso, L.M.; Roux, L.D.; Taunay, L.; Watare, A.; Saudemont, C.; Robyns, B. Energy Metering Data Estimation and Validation in Railways. IEEE Trans. Power Deliv. 2022, 37, 4326–4334. [Google Scholar] [CrossRef]






| Speed km/h | Tang et al. [122] | Xiao et al. [123] | ||||||
|---|---|---|---|---|---|---|---|---|
| Normal Line | Neutral Sec. | Normal Line | Neutral Sec. | |||||
| a | b | a | b | a | b | a | b | |
| 80 | — | — | — | — | — | — | ||
| 110 | — | — | ||||||
| 130 | — | — | — | — | ||||
| 180 | — | — | — | — | ||||
| 250 | — | — | ||||||
| 350 | — | — | — | — | — | — | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mariscotti, A. The Electrical Behaviour of Railway Pantograph Arcs. Energies 2023, 16, 1465. https://doi.org/10.3390/en16031465
Mariscotti A. The Electrical Behaviour of Railway Pantograph Arcs. Energies. 2023; 16(3):1465. https://doi.org/10.3390/en16031465
Chicago/Turabian StyleMariscotti, Andrea. 2023. "The Electrical Behaviour of Railway Pantograph Arcs" Energies 16, no. 3: 1465. https://doi.org/10.3390/en16031465
APA StyleMariscotti, A. (2023). The Electrical Behaviour of Railway Pantograph Arcs. Energies, 16(3), 1465. https://doi.org/10.3390/en16031465