
A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs)



Abstract
1. Introduction
- A mathematical model of an intelligent whale optimization algorithm (p-WOA) for cluster optimization was developed.
- Predictive vehicle initialization procedures to eliminate randomness were created.
- Self-adjusted weights of each vehicle based on their fitness functions for optimal performance were designed.
- A statistical analysis to evaluate the developed method with other well-established methods was performed.
1.1. Bio-Inspired Algorithms for VANETs
- Evolutionary algorithms effectively handle varied topological structures found in VANET networks because they are self-organizing and adaptable to different scenarios.
- As they incorporate the highest level of exploration and exploitation, algorithms with bio-inspiration are more accurate at detecting the network’s damaged nodes. This offers a practical means of lowering security attacks on the network and, thus, improving its security.
- Employing biologically inspired approaches has additional benefits, including their low complexity in handling a VANET’s computational issues, which include network overhead, packet delivery ratio, minimizing delay, and improving the convergence factor.
1.2. Background Research and Literature
2. Materials and Methods
- Representation: Individuals inside evolutionary algorithms are defined in representation.
- Evaluation Function: The fundamental for enabling improvements is the identification of a fitness function or maximized function. To determine the legitimacy of a solution, this threshold value must be attained.
- Population: This contains every potential resolution.
- Parent Selection Mechanism: This identifies solutions that can serve as the foundation or parents for the following generation.
- Variation Operators: To separate the novel solutions from the old ones, two variation operators, mutations and rearrangements, were used.
- Selection Mechanism: This works exactly like parent selection, only it happens in the following cycle of evolution when the candidate solution is mature enough to be judged.
- Best Solution: Once all of the fitness functions are evaluated, the cluster head is selected based on the best packet Delivery Ratio, latency, and average throughput.
2.1. The p-WOA Algorithm for Intelligent Whale Optimization
2.2. Mathematical Modelling of p-WOA
- (1)
- Encircling Prey
- (2)
- Bubble-net Attacking Method (Exploitation Phase)
- (3)
- (2.1) Shrinking Encircling Mechanism
- (4)
- (2.2) Spiral Updating Position
- (5)
- Search for Prey (Exploration Phase)
2.3. p-WOA Probabilistic Modelling
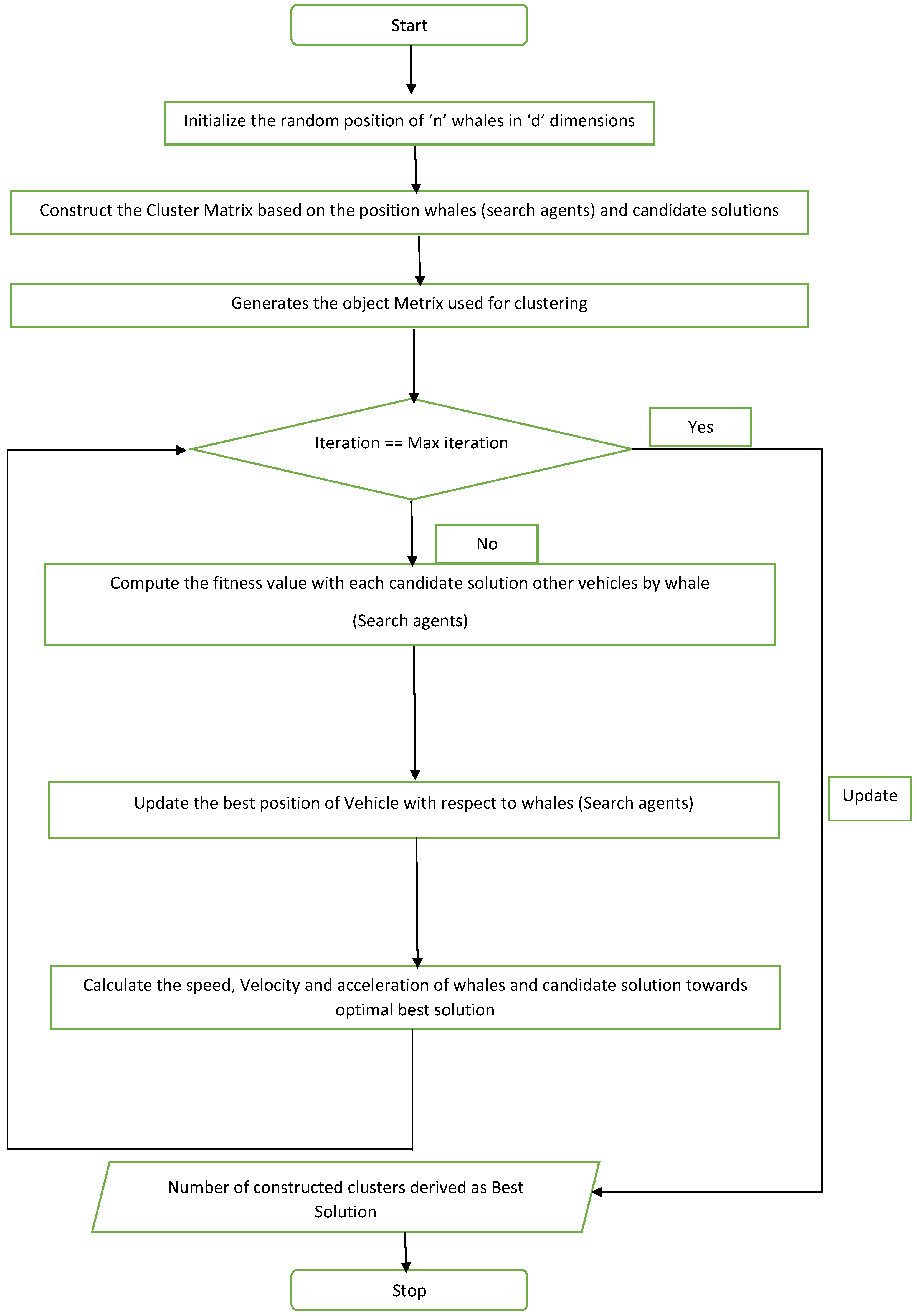
| Algorithm 1 Pseudocode of p-WOA |
|
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tambawal, A.B.; Noor, R.; Salleh, R.; Chembe, C.; Oche, M. Enhanced weight-based clustering algorithm to provide reliable delivery for VANET safety applications. PLoS ONE 2019, 14, e0214664. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, J.; Khoukhi, L.; Labiod, H.; Vèque, V. A review of clustering algorithms in VANETs. Ann. Telecommun. 2021, 76, 581–603. [Google Scholar] [CrossRef]
- Kalita, C.S.; Barooah, M. Li-Fi Based Handoff Technique in VANET. In Proceedings of the 2020 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 2–4 July 2020; pp. 654–658. [Google Scholar] [CrossRef]
- Belmekki, S.; Wahl, M.; Sondi, P.; Gruyer, D.; Tatkeu, C. Toward the Integration of V2V Based Clusters in a Global Infrastructure Network for Vehicles. In Communication Technologies for Vehicles—Nets4Cars/Nets4Trains/Nets4Aircraft 2020; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; Volume 12574, pp. 113–122. [Google Scholar] [CrossRef]
- Qiu, T.; Wang, X.; Chen, C.; Atiquzzaman, M.; Liu, L. TMED: A Spider-Web-Like Transmission Mechanism for Emergency Data in Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2018, 67, 8682–8694. [Google Scholar] [CrossRef]
- Husnain, G.; Anwar, S. An Intelligent Probabilistic Whale Optimization Algorithm (i-WOA) for Clustering in Vehicular Ad Hoc Networks. Int. J. Wirel. Inf. Networks 2022, 29, 143–156. [Google Scholar] [CrossRef]
- RITA|Intelligent Transportation Systems (ITS). Available online: https://www.its.dot.gov/itspac/advisory_memo.htm (accessed on 16 June 2022).
- Bhatia, T.K.; Ramachandran, R.K.; Doss, R.; Pan, L. Data congestion in VANETs: Research directions and new trends through a bibliometric analysis. J. Supercomput. 2021, 77, 6586–6628. [Google Scholar] [CrossRef]
- Zaidi, S.; Bitam, S.; Mellouk, A. Enhanced user datagram protocol for video streaming in VANET. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Magaia, N.; Sheng, Z. ReFIoV: A Novel Reputation Framework for Information-Centric Vehicular Applications. IEEE Trans. Veh. Technol. 2018, 68, 1810–1823. [Google Scholar] [CrossRef]
- Senouci, O.; Zibouda, A.; Harous, S. Survey: Routing protocols in vehicular ad hoc networks. In Proceeding of the AWICT 2017: Proceedings of the Second International Conference on Advanced Wireless Information, Data, and Communication Technologies, Paris, France, 13–14 November 2017; pp. 1–6. [CrossRef]
- Hu, L.; Wang, H.; Zhao, Y. Performance Analysis of DSRC-Based Vehicular Safety Communication in Imperfect Channels. IEEE Access 2020, 8, 107399–107408. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, Z.-C.; Liu, F.; Li, P.; Xie, G. Bio-Inspired Speed Curve Optimization and Sliding Mode Tracking Control for Subway Trains. IEEE Trans. Veh. Technol. 2019, 68, 6331–6342. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Husnain, G.; Anwar, S.; Shahzad, F.; Sikander, G.; Tariq, R.; Bakhtyar, M.; Lim, S. An Intelligent Harris Hawks Optimization Based Cluster Optimization Scheme for VANETs. J. Sens. 2022, 2022, 6790082. [Google Scholar] [CrossRef]
- Husnain, G.; Anwar, S. An intelligent cluster optimization algorithm based on Whale Optimization Algorithm for VANETs (WOACNET). PLoS ONE 2021, 16, e0250271. [Google Scholar] [CrossRef]
- Woeginger, G.J. Exact Algorithms for NP-Hard Problems: A Survey. In Combinatorial Optimization—Eureka, You Shrink! Jünger, M., Reinelt, G., Rinaldi, G., Eds.; Lecture Notes in Computer, Science; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2570, pp. 185–207. [Google Scholar] [CrossRef]
- Satyajeet, D.; Deshmukh, A.R.; Dorle, S.S. Heterogeneous Approaches for Cluster based Routing Protocol in Vehicular Ad Hoc Network (VANET). Int. J. Comput. Appl. 2016, 134, 1–8. [Google Scholar]
- Amudhavel, J.; Kumar, K.P.; Narmatha, T.; Sampathkumar, S.; Jaiganesh, S.; Vengattaraman, T. Multi-Objective Clustering Methodologies and its Applications in VANET. In Proceedings of the ICARCSET ‘15: Proceedings of the 2015 International Conference on Advanced Research in Computer Science Engineering & Technology (ICARCSET 2015); Unnao, India, 6–7 March 2015. [CrossRef]
- Ayyub, M.; Oracevic, A.; Hussain, R.; Khan, A.A.; Zhang, Z. A comprehensive survey on clustering in vehicular networks: Current solutions and future challenges. Ad Hoc Netw. 2021, 124, 102729. [Google Scholar] [CrossRef]
- Khakpour, S. Cluster-Based Target Tracking in Vehicular Ad Hoc Networks. Master’s Thesis, University of Ontario Institute of Technology, Oshawa, ON, Canada, 2015. [Google Scholar]
- Fahad, M.; Aadil, F.; Rehman, Z.; Khan, S.; Shah, P.A.; Muhammad, K.; Lloret, J.; Wang, H.; Lee, J.W.; Mehmood, I. Grey wolf optimization based clustering algorithm for vehicular ad-hoc networks. Comput. Electr. Eng. 2018, 70, 853–870. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H. Dynamic Adaptive Ant Lion Optimizer applied to route planning for unmanned aerial vehicle. Soft Comput. 2017, 21, 5475–5488. [Google Scholar] [CrossRef]
- Wagh, M.B.; Gomathi, N. Route discovery for vehicular ad hoc networks using modified lion algorithm. Alex. Eng. J. 2018, 57, 3075–3087. [Google Scholar] [CrossRef]
- Azzoug, Y.; Boukra, A. Bio-inspired VANET routing optimization: An overview—A taxonomy of notable VANET routing problems, overview, advancement state, and future perspective under the bio-inspired optimization approaches. Artif. Intell. Rev. 2021, 54, 1005–1062. [Google Scholar] [CrossRef]
- Wagh, M.B.; Gomathi, N. Water wave optimization-based routing protocol for vehicular adhoc networks. Int. J. Model. Simul. Sci. Comput. 2018, 9, 1850047. [Google Scholar] [CrossRef]
- Al Balas, F.; Almomani, O.; Abu Jazoh, R.M.; Khamayseh, Y.M.; Saaidah, A. An Enhanced End to End Route Discovery in AODV using Multi-Objectives Genetic Algorithm. In Proceedings of the IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, 9–11 April 2019; pp. 209–214. [Google Scholar] [CrossRef]
- Bitam, S.; Mellouk, A. Bee life-based multi constraints multicast routing optimization for vehicular ad hoc networks. J. Netw. Comput. Appl. 2013, 36, 981–991. [Google Scholar] [CrossRef]
- Aadil, F.; Bajwa, K.B.; Khan, S.; Chaudary, N.M.; Akram, A. CACONET: Ant Colony Optimization (ACO) Based Clustering Algorithm for VANET. PLoS ONE 2016, 11, e0154080. [Google Scholar] [CrossRef]
- Shah, Y.A.; Habib, H.A.; Aadil, F.; Khan, M.F.; Maqsood, M.; Nawaz, T. CAMONET: Moth-Flame Optimization (MFO) Based Clustering Algorithm for VANETs. IEEE Access 2018, 6, 48611–48624. [Google Scholar] [CrossRef]
- Husnain, G.; Anwar, S.; Shahzad, F. Performance evaluation of CLPSO and MOPSO routing algorithms for optimized clustering in Vehicular Ad Hoc Networks. In Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; pp. 772–778. [Google Scholar]
- Joshua, C.J.; Duraisamy, R.; Varadarajan, V. A Reputation based Weighted Clustering Protocol in VANET: A Multi-objective Firefly Approach. Mob. Netw. Appl. 2019, 24, 1199–1209. [Google Scholar] [CrossRef]
- Lee, U.; Magistretti, E.; Gerla, M.; Bellavista, P.; Lió, P.; Lee, K.-W. Bio-inspired multi-agent data harvesting in a proactive urban monitoring environment. Ad Hoc Netw. 2009, 7, 725–741. [Google Scholar] [CrossRef]
- Yarinezhad, R.; Sarabi, A. A New Routing Algorithm for Vehicular Ad-hoc Networks based on Glowworm Swarm Optimization Algorithm. J. AI Data Min. 2019, 7, 69–76. [Google Scholar] [CrossRef]
- Harrabi, S.; Ben Jaafar, I.; Ghedira, K. Message Dissemination in Vehicular Networks on the Basis of Agent Technology. Wirel. Pers. Commun. 2017, 96, 6129–6146. [Google Scholar] [CrossRef]
- Fathian, M.; Jafarian-Moghaddam, A.R. New clustering algorithms for vehicular ad-hoc network in a highway communication environment. Wirel. Netw. 2015, 21, 2765–2780. [Google Scholar] [CrossRef]
- Chowdhary, N.; Kaur, P.D. Dynamic Route Optimization Using Nature-Inspired Algorithms in IoV. In Proceedings of First International Conference on Smart System, Innovations and Computing; Smart Innovation, Systems and Technologies; Springer: Singapore, 2018; Volume 79, pp. 495–504. [Google Scholar] [CrossRef]
- Mirjalili, S. The Ant Lion Optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Afzal, K.; Tariq, R.; Aadil, F.; Iqbal, Z.; Ali, N.; Sajid, M. An Optimized and Efficient Routing Protocol Application for IoV. Math. Probl. Eng. 2021, 2021, 9977252. [Google Scholar] [CrossRef]
- Assila, B.; Kobbane, A. Improving Latency and Bandwidth for Intelligent Transport Services Exploiting Caching Technology. In Proceedings of the International Conference on Wireless Networks and Mobile Communications (WINCOM), Fez, Morocco, 29 October–1 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Houmer, M.; Hasnaoui, M.L. A Qualitative Assessment of VANET Routing Protocols Under Different Mobility Models. J. Comput. Sci. 2019, 15, 161–170. [Google Scholar] [CrossRef]
- Ahsan, W.; Khan, M.F.; Aadil, F.; Maqsood, M.; Ashraf, S.; Nam, Y.; Rho, S. Optimized Node Clustering in VANETs by Using Meta-Heuristic Algorithms. Electronics 2020, 9, 394. [Google Scholar] [CrossRef]
- Aadil, F.; Ahsan, W.; Rehman, Z.U.; Shah, P.A.; Rho, S.; Mehmood, I. Clustering algorithm for internet of vehicles (IoV) based on dragonfly optimizer (CAVDO). J. Supercomput. 2018, 74, 4542–4567. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Y.; Gu, X.; Chen, L.; Wan, J. ClusterRep: A cluster-based reputation framework for balancing privacy and trust in vehicular participatory sensing. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718803299. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of vehicles (Particles) | 100 |
| Epoch | 350 |
| Vehicle Speed | 22–30 m/s |
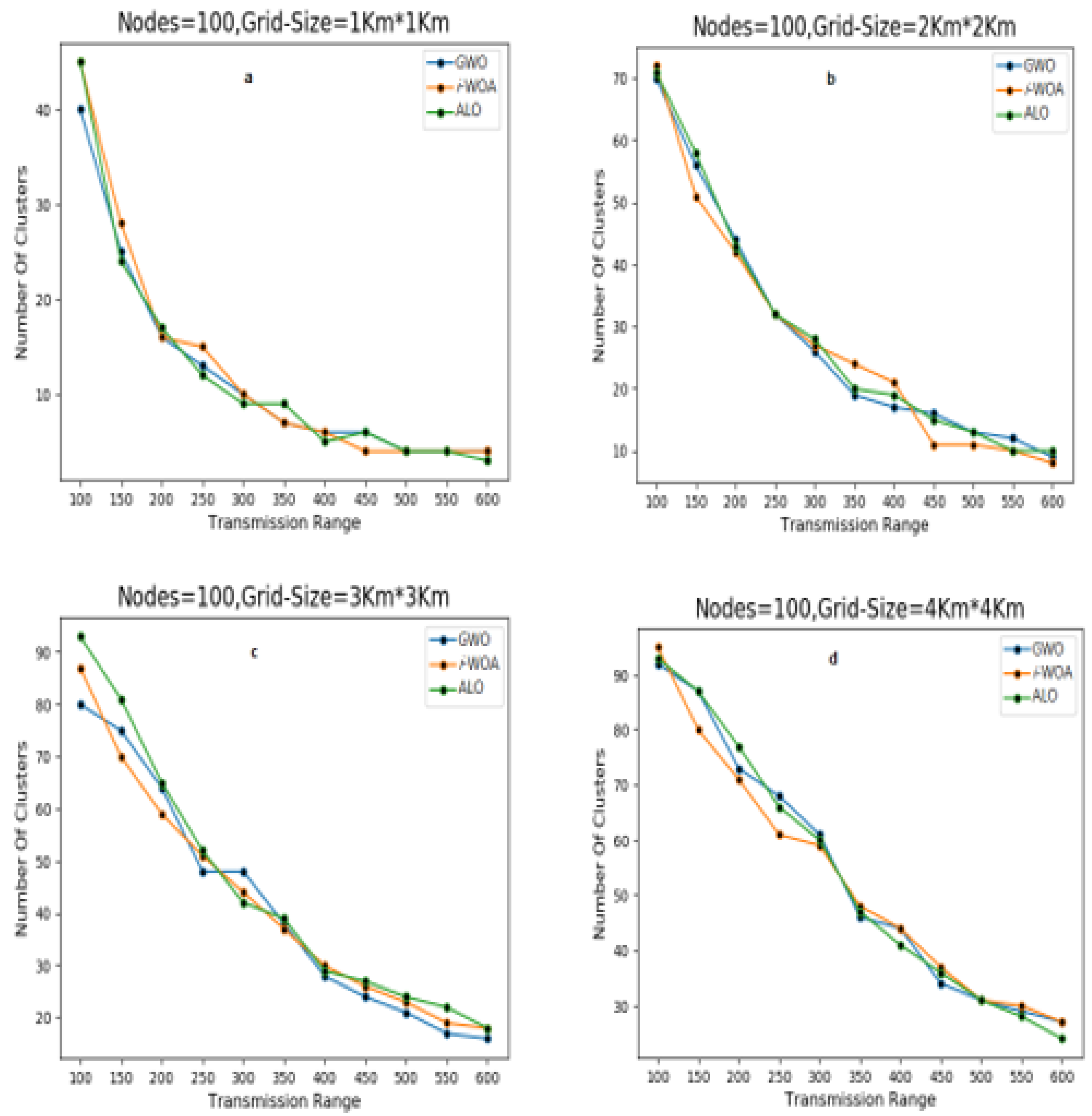
| Grid size (Area of Network) | 1 km × 1 km to 4 km × 4 km |
| Communication Range | 100–600 m |
| Mobility Model | Freeway Mobility Model |
| Number of Simulations | 10 |
| Weights | 0.5 |
| Convergence Factor | 0.001 |
| Processor | AMD Radeon™ RX 5700 XT |
| Memory | 8 GB |
| Dependent Variables | Variable | Coefficient | Prob. | R-Squared | Adjusted R-Squared | ANOVA |
|---|---|---|---|---|---|---|
| NO OF CLUSTERS ALO [38] | TR | 0.042088 | 0.0097 | 0.715376 | 0.679798 | F(1 9) = 20.73 *** |
| C | 27.73294 | 0.0005 | ||||
| NO OF CLUSTERS GWO [22] | TR | 0.040038 | 0.0124 | 0.706213 | 0.669490 | F(1 9) = 22.81 *** |
| C | 27.15528 | 0.0006 | ||||
| NO OF CLUSTERS p-WOA | TR | 0.039256 | 0.0092 | 0.779748 | 0.752216 | F(1 9) = 25.55 *** |
| C | 27.00485 | 0.0004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husnain, G.; Anwar, S.; Sikander, G.; Ali, A.; Lim, S. A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs). Energies 2023, 16, 1456. https://doi.org/10.3390/en16031456
Husnain G, Anwar S, Sikander G, Ali A, Lim S. A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs). Energies. 2023; 16(3):1456. https://doi.org/10.3390/en16031456
Chicago/Turabian StyleHusnain, Ghassan, Shahzad Anwar, Gulbadan Sikander, Armughan Ali, and Sangsoon Lim. 2023. "A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs)" Energies 16, no. 3: 1456. https://doi.org/10.3390/en16031456
APA StyleHusnain, G., Anwar, S., Sikander, G., Ali, A., & Lim, S. (2023). A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs). Energies, 16(3), 1456. https://doi.org/10.3390/en16031456