
Robust Finite Control-Set Model Predictive Control for Power Quality Enhancement of a Wind System Based on the DFIG Generator


 ,
,  ,
,  and
and 
Abstract
1. Introduction
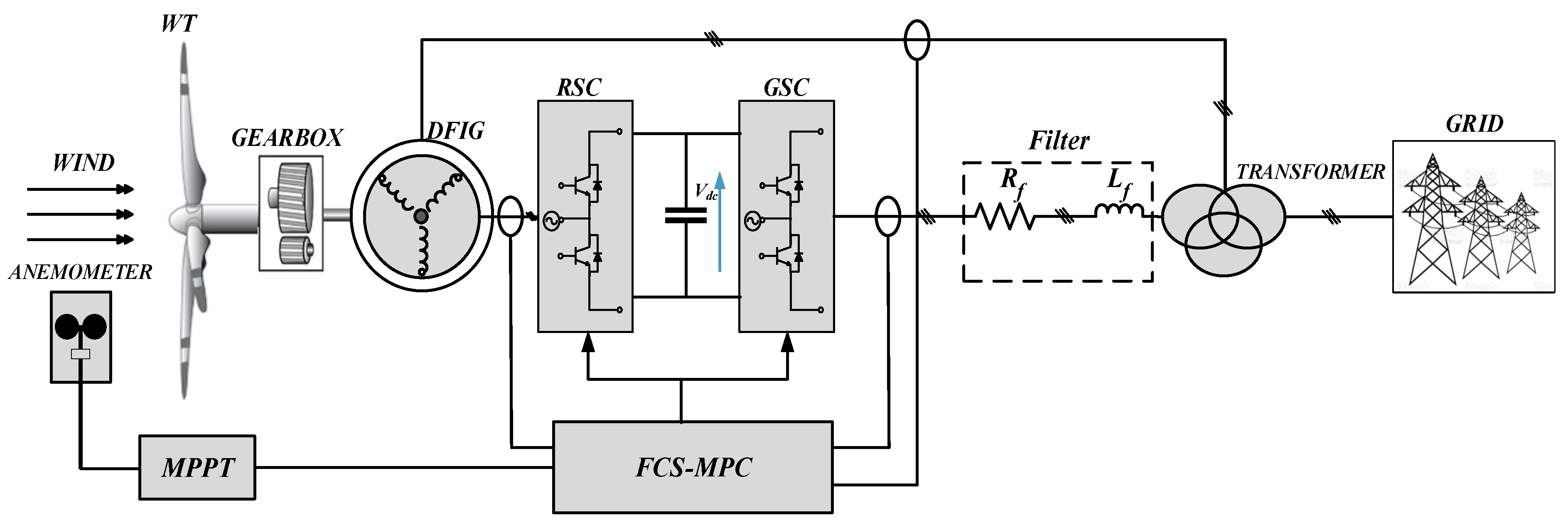
2. Modeling of The Wind Turbine System with DFIG
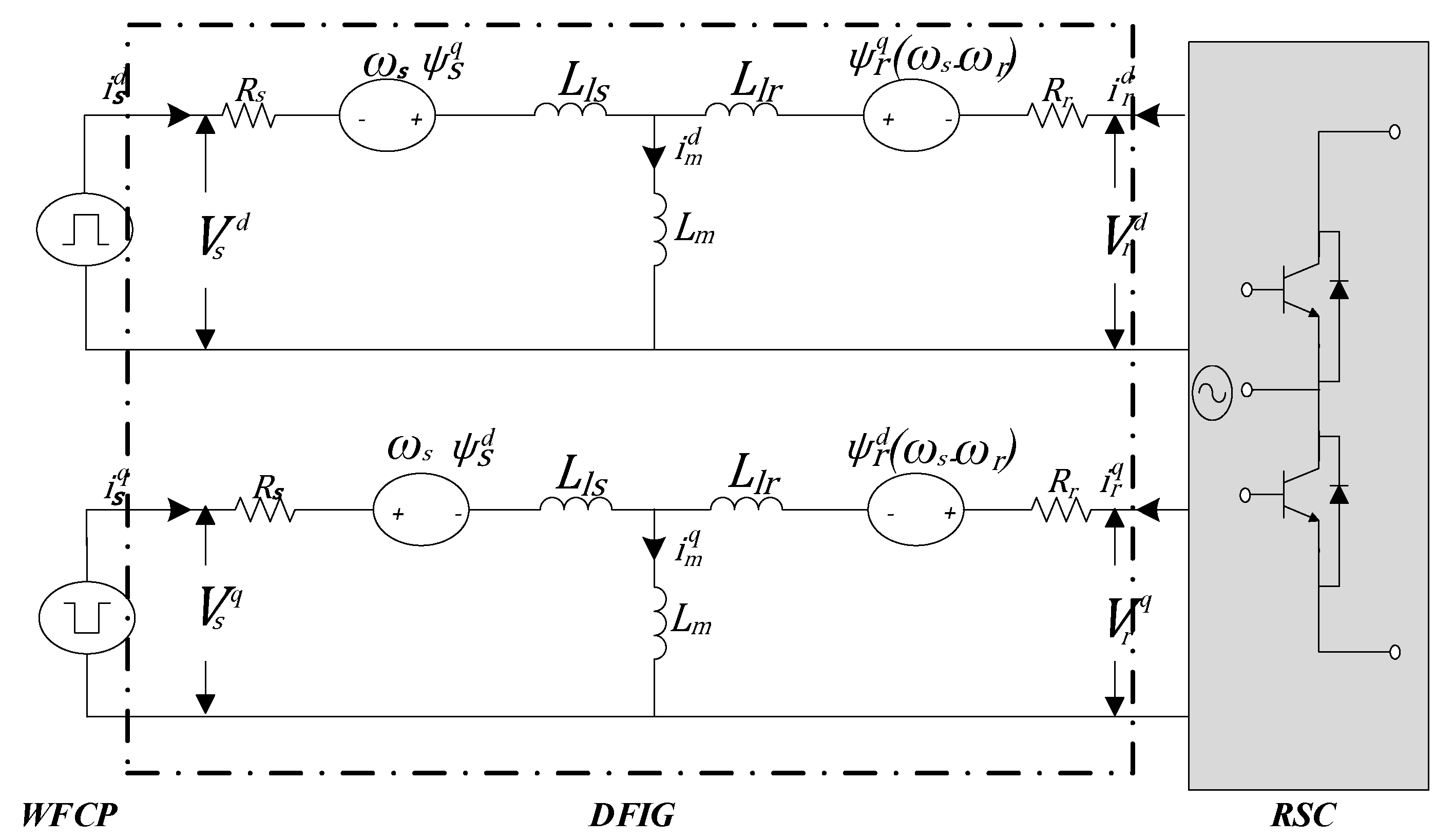
2.1. Modeling of the DFIG
2.2. Converter and DC-Bus
3. Continuous-Time Dynamic Models of DFIG
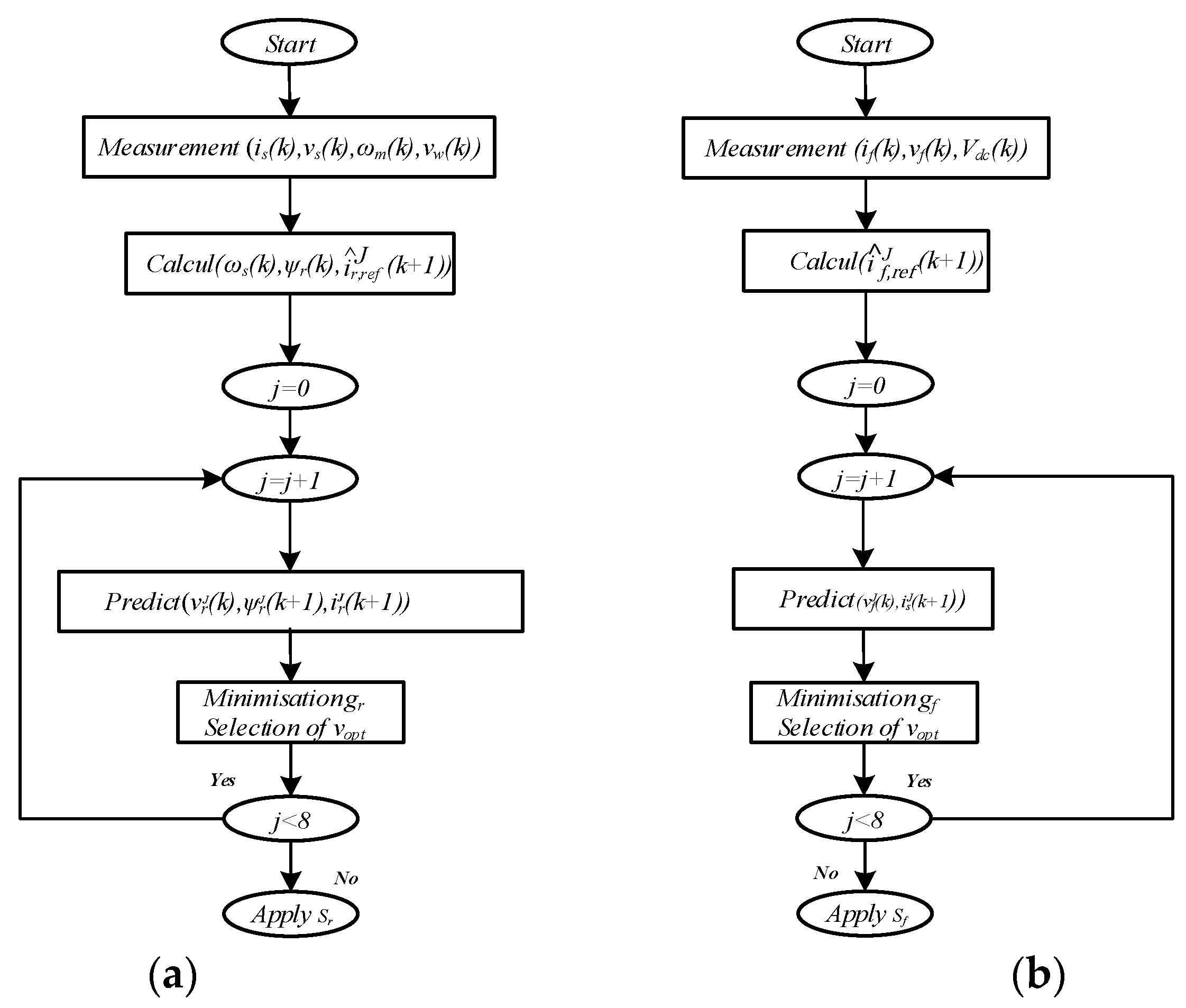
4. FCS-MPC Strategy
5. Model Predictive Control
5.1. MPC Control for RSC
5.2. MPC Control for GSC
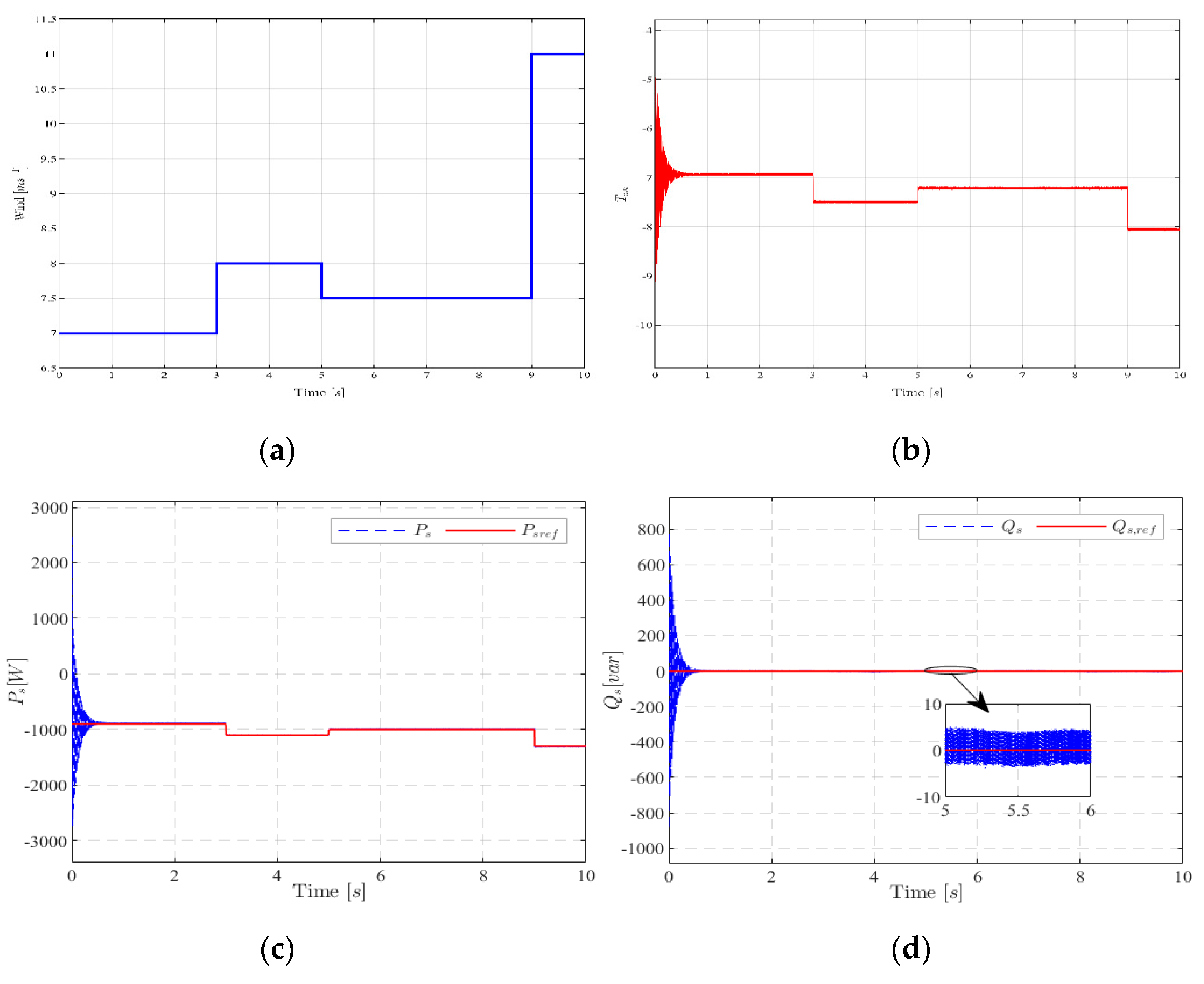
6. Simulation Results
7. Discussion
- The decoupling between the active and reactive powers of the stator is assured;
- The electromagnetic torque (Figure 6b) depends directly on the active power—its similar shape reflects this to that of the active power;
- The negative value of the stator power (Figure 6c) explains the operation of the machine in generator model;
- The reactive power is equal to zero (Figure 6d), indicating the uniqueness of the power factor;
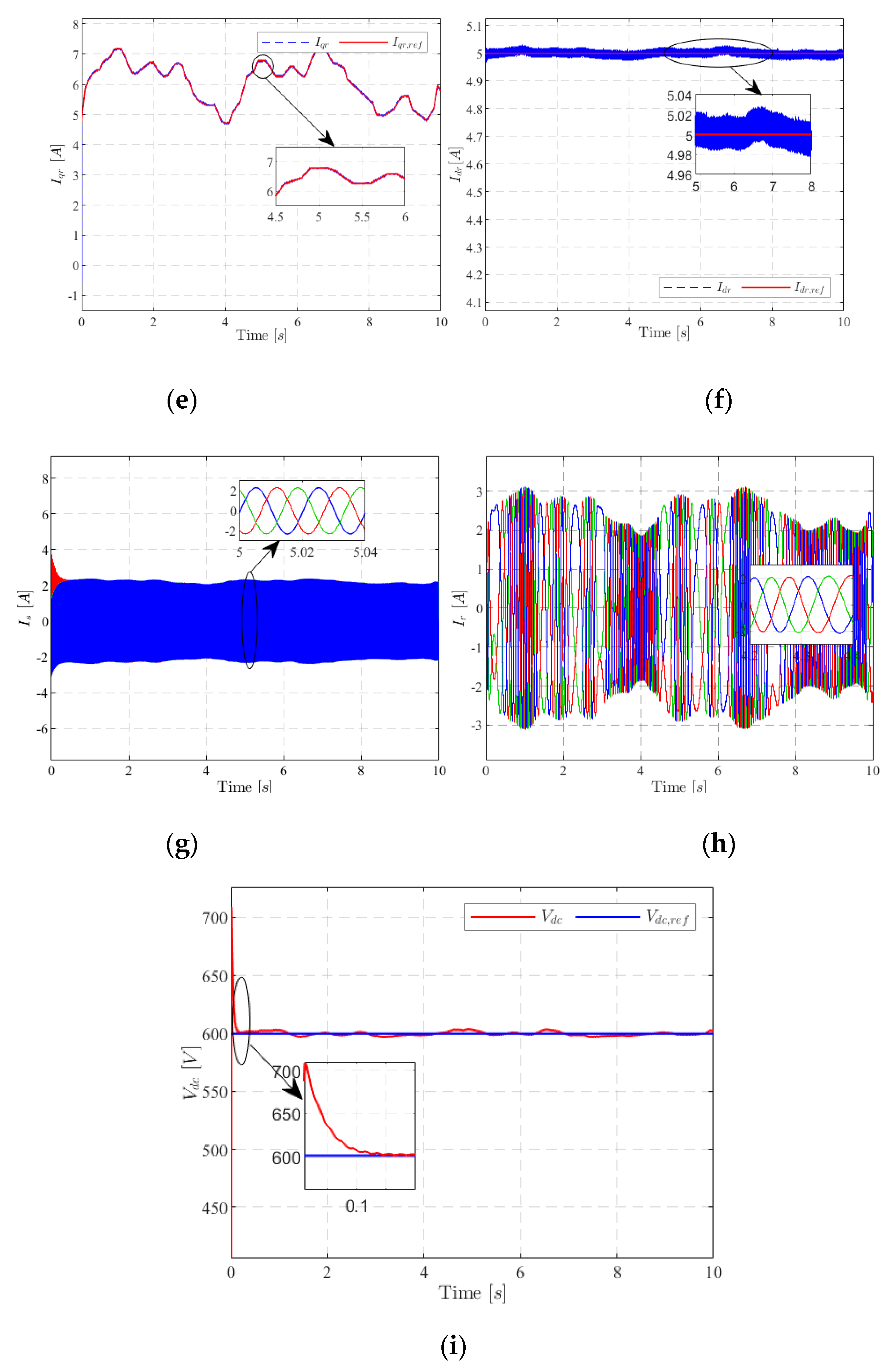
- The quadrature rotor current varies linearly with with a negative coefficient described in the Equation (26), which is illustrated in Figure 6e;
- The direct rotor current depends on the stator reactive power —according to Figure 6f, the trend of the direct current has a constant value of about 5 A, due to the ratio /;
- The evolution of the rotor and stator currents (Figure 6g,h) in three-phase abc keeps a sinusoidal form, which implies a frequency of a value 50 Hz, which indicates a better quality of the energy injected into the network;
- The DC bus (Figure 6i) follows its reference value with a small error and an overrun of 8.3%.
- The decoupling between the active and reactive powers of the stator is assured;
- The electromagnetic torque (Figure 7b) depends directly on the active power—its similar shape reflects this to that of the active power;
- The negative value of the stator power (Figure 7c) explains the operation of the machine in generator mode;
- The reactive power is zero (Figure 7d), indicating the uniqueness of the power factor;
- The quadrature rotor current varies linearly with with a negative coefficient described in Equation (26), which is illustrated in (Figure 7e);
- The direct rotor current depends on the stator reactive power —according to Figure 7f, the trend of the direct current has a constant value of about 5 A, due to the ratio /;
- The evolution of the rotor and stator currents (Figure 7g,h) in three-phase abc keeps a sinusoidal form, which implies a frequency of a value 50 Hz, which implies a better quality of the energy injected into the network;
- The DC bus (Figure 7i) follows its reference value with a small error.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Rs, Rr | Resistances of the stator/rotor |
| Rf, Lf | Resistances and inductance of a phase of the filter |
| Lr, Ls | Inductances of the stator/rotor |
| Lm | Generator magnetizing inductance |
| Number of pole pairs in a generator | |
| Ps, Pf | Active power at stator, and filter |
| Qs, Qf | Reactive power to stator, and filter |
| s, ψr | Flux of the stator/rotor |
| Generator stator electrical angular frequency | |
| Generator rotor electrical angular speed | |
| Digital controller sampling time | |
| ir(a,b,c), is(a,b,c) | Rotor and stator currents |
| (vsd, vsq), (isd, isq) | d/q stator voltages and currents |
| (vrd, vrq), (ird, irq) | d/q rotor voltages and currents |
| (vfd, vfq), (ifd, ifq) | Voltages and currents at the RL filter |
| Stator transient time constant | |
| Total leakage coefficient | |
| Stator and rotor coupling coefficients |
References
- El Alami, H.; Bossoufi, B.; Motahhir, S.; Alkhammash, E.H.; Masud, M.; Karim, M.; Taoussi, M.; Bouderbala, M.; Lamnadi, M.; El Mahfoud, M. FPGA in the Loop Implementation for Observer Sliding Mode Control of DFIG-Generators for Wind Turbines. Electronics 2021, 11, 116. [Google Scholar] [CrossRef]
- Bossoufi, B.; Karim, M.; Taoussi, M.; Aroussi, H.A.; Bouderbala, M.; Deblecker, O.; Motahhir, S.; Nayyar, A.; Alzain, M.A. Rooted tree optimization for the backstepping power control of a doubly fed induction generator wind turbine: dSPACE implementation. IEEE Access 2021, 9, 26512–26522. [Google Scholar] [CrossRef]
- El Mahfoud, M.; Bossoufi, B.; El Ouanjli, N.; Mahfoud, S.; Yessef, M.; Taoussi, M. Speed Sensorless Direct Torque Control of Doubly Fed Induction Motor Using Model Reference Adaptive System. In Proceedings of the International Conference on Digital Technologies and Applications, Fez, Morocco, 29–30 January 2021; pp. 1821–1830. [Google Scholar]
- Ekanayake, J.; Holdsworth, L.; Jenkins, N. Control of DFIG wind turbines. Power Eng. 2003, 17, 28–32. [Google Scholar] [CrossRef]
- Kayikci, M.; Milanovic, J.V. Reactive power control strategies for DFIG-based plants. IEEE Trans. Energy Convers. 2007, 22, 389–396. [Google Scholar]
- El Alami, H.; Bossoufi, B.; El Mahfoud, M.; Btissam, M.; Yessef, M.; Bekkour, E.H.; Salime, H. Improved Performance of Wind Turbines Based on Doubly Fed Generator Using the IFOC-SVM Control. In Proceedings of the International Conference on Digital Technologies and Applications, Fez, Morocco, 28–30 January 2022; pp. 812–822. [Google Scholar]
- Hu, J.; He, Y.; Xu, L.; Williams, B.W. Improved control of DFIG systems during network unbalance using PI–R current regulators. IEEE Trans. Ind. Electron. 2008, 56, 439–451. [Google Scholar] [CrossRef]
- Tavakoli, S.M.; Pourmina, M.A.; Zolghadri, M.R. Comparison between different DPC methods applied to DFIG wind turbines. Int. J. Renew. Energy Res. 2013, 3, 446–452. [Google Scholar]
- Emeksiz, C.; Demirci, B. The determination of offshore wind energy potential of Turkey by using novelty hybrid site selection method. Sustain. Energy Technol. Assess. 2019, 36, 100562. [Google Scholar] [CrossRef]
- Benamor, A.; Benchouia, M.T.; Srairi, K.; Benbouzid, M.E.H. A new rooted tree optimization algorithm for indirect power control of wind turbine based on a doubly-fed induction generator. ISA Trans. 2019, 88, 296–306. [Google Scholar] [CrossRef]
- Boubzizi, S.; Abid, H.; El Hajjaji, A.; Chaabane, M. Comparative study of three types of controllers for DFIG in wind energy conversion system. Prot. Control Mod. Power Syst. 2018, 3, 1–12. [Google Scholar] [CrossRef]
- Abad, G.; López, J.; Rodríguez, M.A.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; John Wiley and Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Majout, B.; El Alami, H.; Salime, H.; Zine Laabidine, N.; El Mourabit, Y.; Motahhir, S.; Bouderbala, M.; Karim, M.; Bossoufi, B. A Review on Popular Control Applications in Wind Energy Conversion System Based on Permanent Magnet Generator PMSG. Energies 2022, 15, 6238. [Google Scholar] [CrossRef]
- Ayyarao, T.S.L.V. Modified vector controlled DFIG wind energy system based on barrier function adaptive sliding mode control. Prot. Control Mod. Power Syst. 2019, 4, 4. [Google Scholar] [CrossRef]
- Allam, M.; Dehiba, B.; Abid, M.; Djeriri, Y.; Adjoudj, R. Etude comparative entre la commande vectorielle directe et indirecte de la Machine Asynchrone à Double Alimentation (MADA) dédiée à une application éolienne. J. Adv. Res. Sci. Technol. 2014, 1, 88–100. [Google Scholar]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Encoderless model predictive control of doubly-fed induction generators in variable-speed wind turbine systems. In Proceedings of the Science of Making Torque from Wind (TORQUE 2016) Conference, Munich, Germany, 5–7 October 2016. [Google Scholar]
- Mohammed, E.M.; Badre, B.; Najib, E.O.; Abdelilah, H.; Houda, E.A.; Btissam, M.; Said, M. Predictive Torque and Direct Torque Controls for Doubly Fed Induction Motor: A Comparative Study. In Proceedings of the International Conference on Digital Technologies and Applications, Fez, Morocco, 28–30 January 2022; pp. 825–835. [Google Scholar]
- Holtz, J. The representation of AC machine dynamics by complex signal flow graphs. IEEE Trans. Ind. Electron. 1995, 42, 263–271. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless control of induction motor drives. Proc. IEEE 2002, 90, 1359–1394. [Google Scholar] [CrossRef]
- Zhi, D.; Xu, L.; Williams, B.W. Model-based predictive direct power control of doubly fed induction generators. IEEE Trans. Power Electron. 2010, 25, 341–351. [Google Scholar]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives, 1st ed.; Wiley-IEEE Press: New York, NY, USA, 2012. [Google Scholar]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R. Model-based predictive direct control strategies for electrical drives: An experimental evaluation of PTC and PCC methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Akter, P.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Modified model predictive control of a bidirectional AC-DC converter based on lyapunov function for energy storage systems. IEEE Trans. Ind. Electron. 2016, 63, 704–715. [Google Scholar] [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; Wiley-IEEE Press: New York, NY, USA, 2011. [Google Scholar]
- Echiheb, F.; Ihedrane, Y.; Bossoufi, B.; Bouderbala, M.; Motahhir, S.; Masud, M.; Aljahdali, S.; El Ghamrasni, M. Robust Sliding-Backstepping mode Control of a wind system based on the DFIG Generator. Sci. Rep. 2022, 12, 11782. [Google Scholar] [CrossRef]
- Djeriri, Y.; Meroufel, A.; Massoum, A.; Boudjema, Z. A comparative study between field oriented control strategy and direct power control strategy for DFIG. J. Electr. Eng. 2014, 14, 9. [Google Scholar]
- Hansen, A.D.; Michalke, G. Fault ride-through capability of DFIG wind turbines. Renew. Energy 2007, 32, 1594–1610. [Google Scholar] [CrossRef]
- Yang, X.; Liu, G.; Le, V.D.; Le, C.Q. A novel model-predictive direct control for induction motor drives. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1691–1702. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.; Li, J.; Gao, L.; Ze, Q. Finite-Control-Set Model Predictive Control for DFIG Wind Turbines. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1004–1013. [Google Scholar] [CrossRef]
- Bouderbala, M.; Bossoufi, B.; Alami Aroussi, H.; Taoussi, M.; Lagrioui, A. Novel deadbeat predictive control strategy for DFIG’s back to back power converter. Int. J. Power Electron. Drive Syst. 2022, 13, 2731–2741. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PMSG Parameters | Wind Turbine Parameters | ||
|---|---|---|---|
| Power Generator Stator Resistance Rotor Resistance Stator inductance Rotor inductance DC Link Voltage | Ps = 1.5 Kw Rs = 4.85 Ω Rr = 3.805 Ω Ls = 274 mH Lr = 258 mH Vdc = 600 V | Radius of the turbine blade Density of air Tip speed Ratio Optimal Power Coefficient | R = 20 m ρ = 1.225 kg/m3 λopt = 8 Cp = 0.45 |
| Publication Paper | Technical Methods | Response Time(s) | Error (%) | THD (%) |
|---|---|---|---|---|
| [25] | Fuzzy SMC | 0.32 | - | - |
| [26] | PI | 0.030 | 1.25 | - |
| RST | 0.028 | 0.06 | - | |
| [27] | SMC-based Backstepping | 0.05 | - | 2.98 |
| [28] | DTC | 0.12 | - | 18.8 |
| FSC | 0.16 | - | 8.26 | |
| MPDC | 0.15 | - | 8.17 | |
| [29] | FCSMPC | 0.15 | - | 6.12 |
| [30] | FCSMPC | 0.12 | - | 4.29 |
| Proposed technique | FCS-MPC | 0.11 | 0.11 | 0.49 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alami, H.E.; Bossoufi, B.; Mahfoud, M.E.; Bouderbala, M.; Majout, B.; Skruch, P.; Mobayen, S. Robust Finite Control-Set Model Predictive Control for Power Quality Enhancement of a Wind System Based on the DFIG Generator. Energies 2023, 16, 1422. https://doi.org/10.3390/en16031422
Alami HE, Bossoufi B, Mahfoud ME, Bouderbala M, Majout B, Skruch P, Mobayen S. Robust Finite Control-Set Model Predictive Control for Power Quality Enhancement of a Wind System Based on the DFIG Generator. Energies. 2023; 16(3):1422. https://doi.org/10.3390/en16031422
Chicago/Turabian StyleAlami, Houda El, Badre Bossoufi, Mohammed El Mahfoud, Manale Bouderbala, Btissam Majout, Paweł Skruch, and Saleh Mobayen. 2023. "Robust Finite Control-Set Model Predictive Control for Power Quality Enhancement of a Wind System Based on the DFIG Generator" Energies 16, no. 3: 1422. https://doi.org/10.3390/en16031422
APA StyleAlami, H. E., Bossoufi, B., Mahfoud, M. E., Bouderbala, M., Majout, B., Skruch, P., & Mobayen, S. (2023). Robust Finite Control-Set Model Predictive Control for Power Quality Enhancement of a Wind System Based on the DFIG Generator. Energies, 16(3), 1422. https://doi.org/10.3390/en16031422