

Analysis and Comparison of Permanent Magnet Synchronous Motors According to Rotor Type under the Same Design Specifications
 , , , and
, , , and
Abstract
1. Introduction
2. Analysis of a PMSM for a Compressor
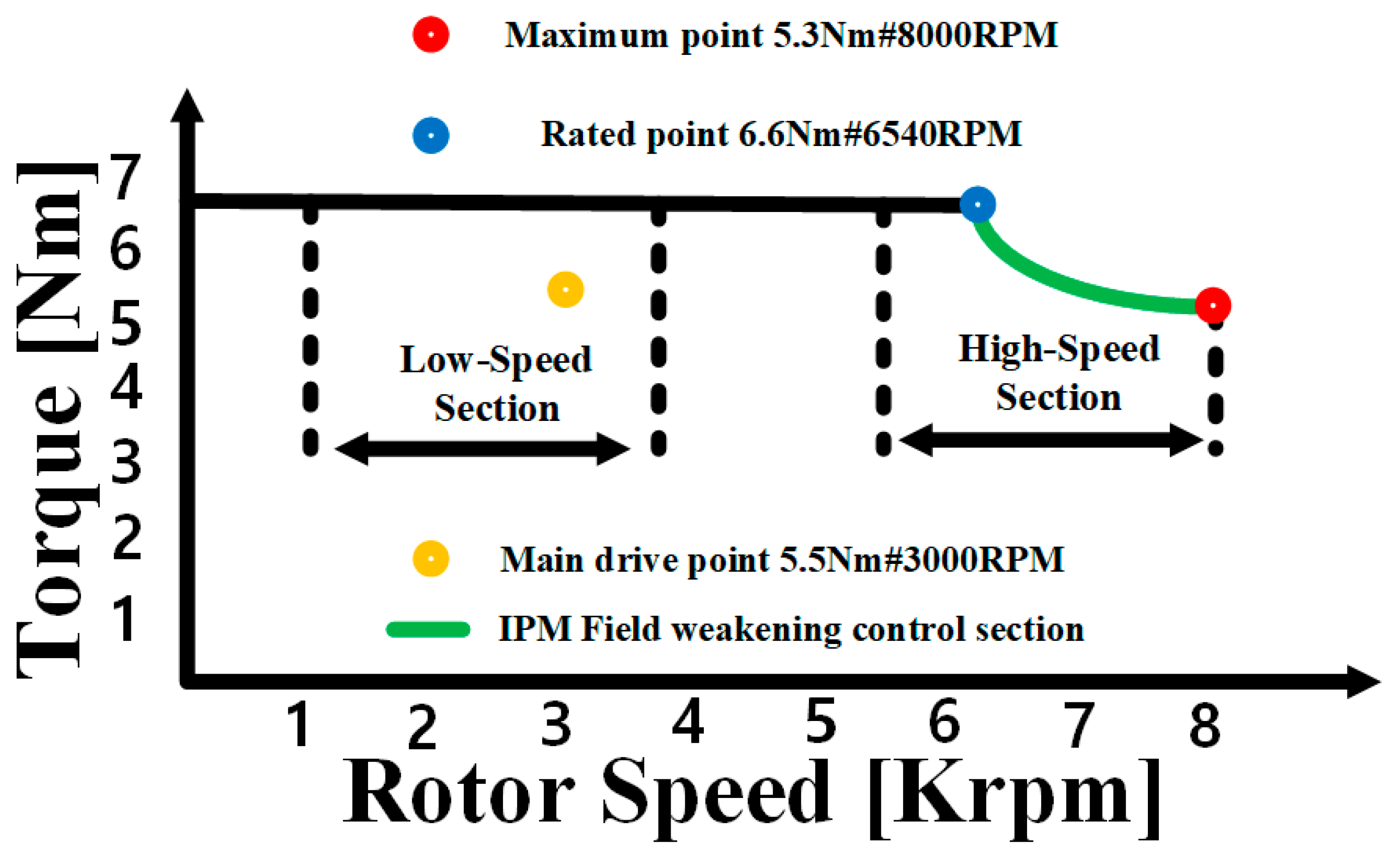
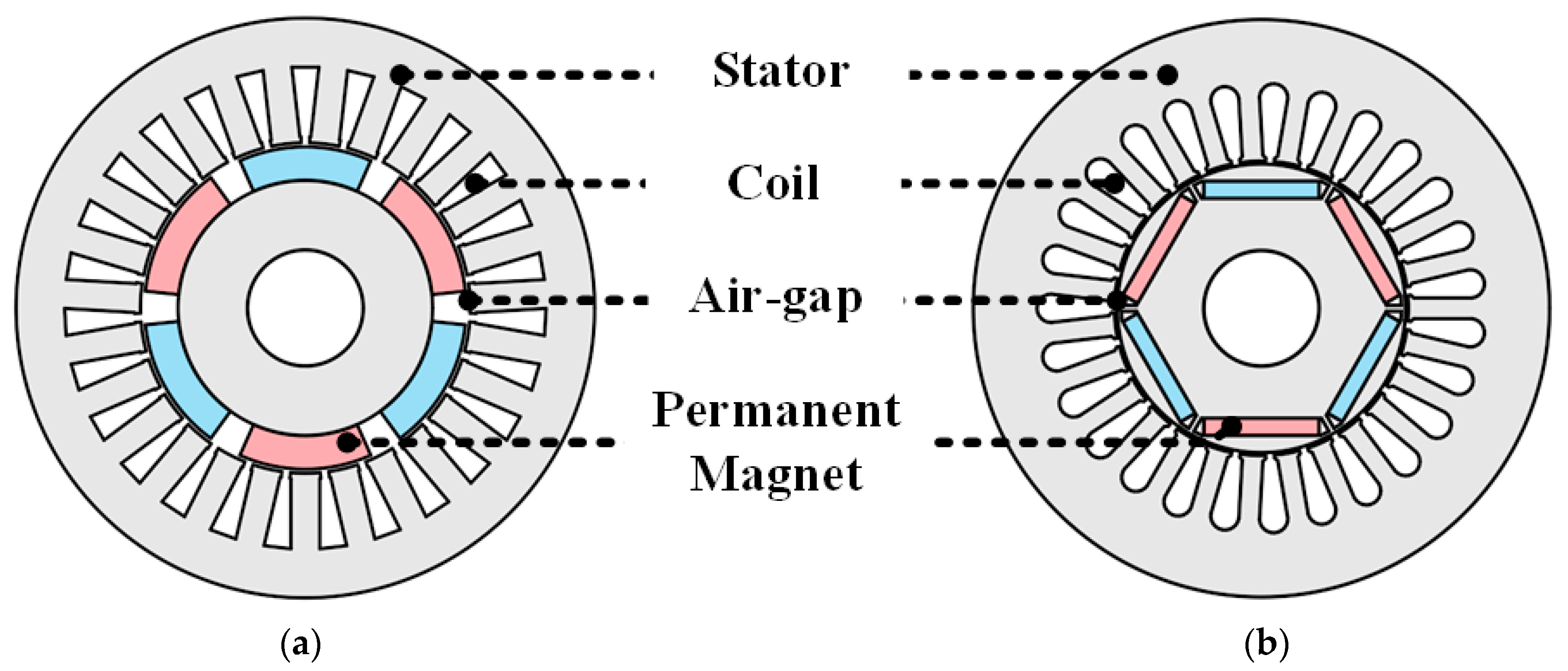
2.1. Analysis Model and Design Requirements
2.2. Design Constraints
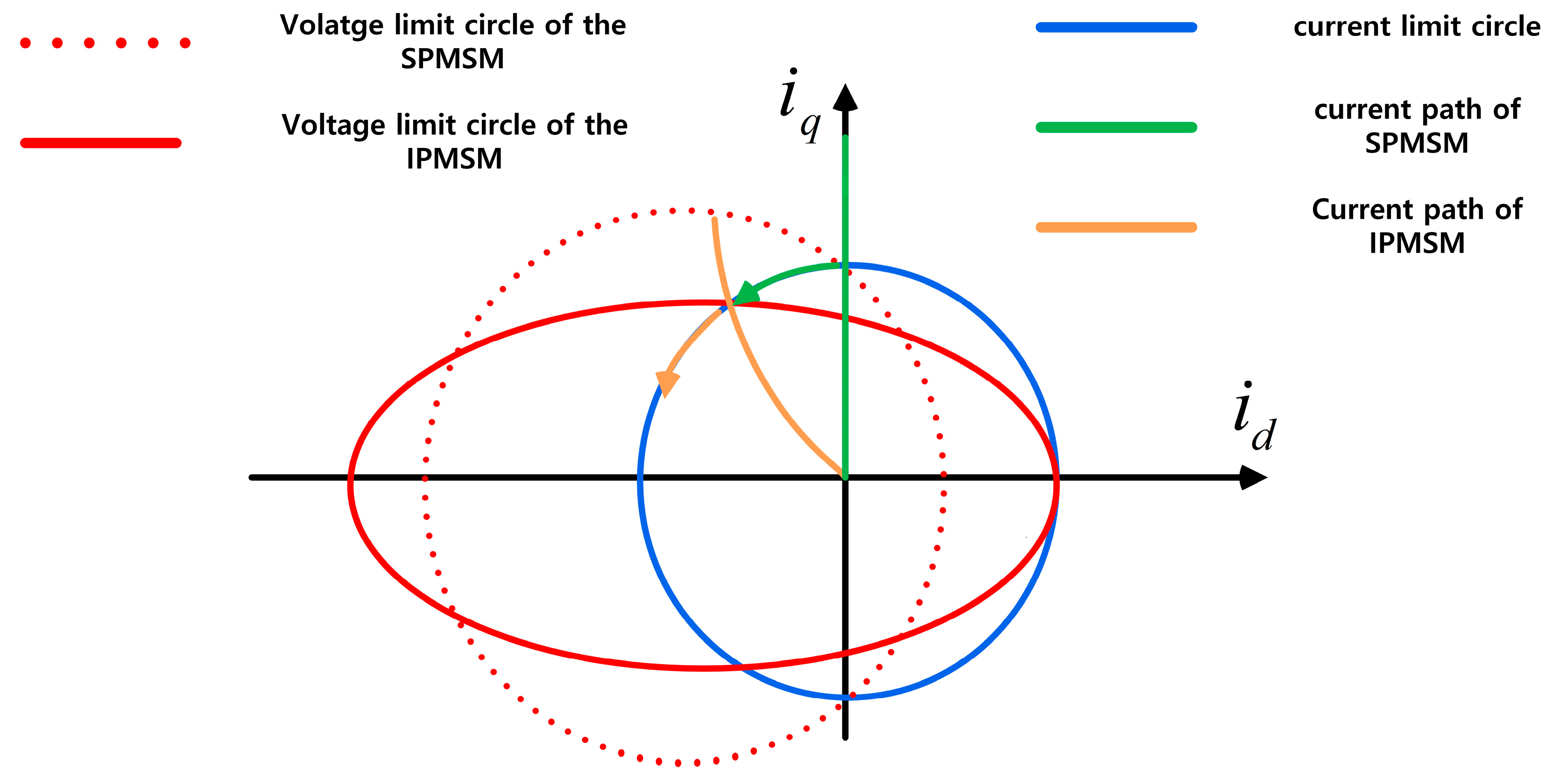
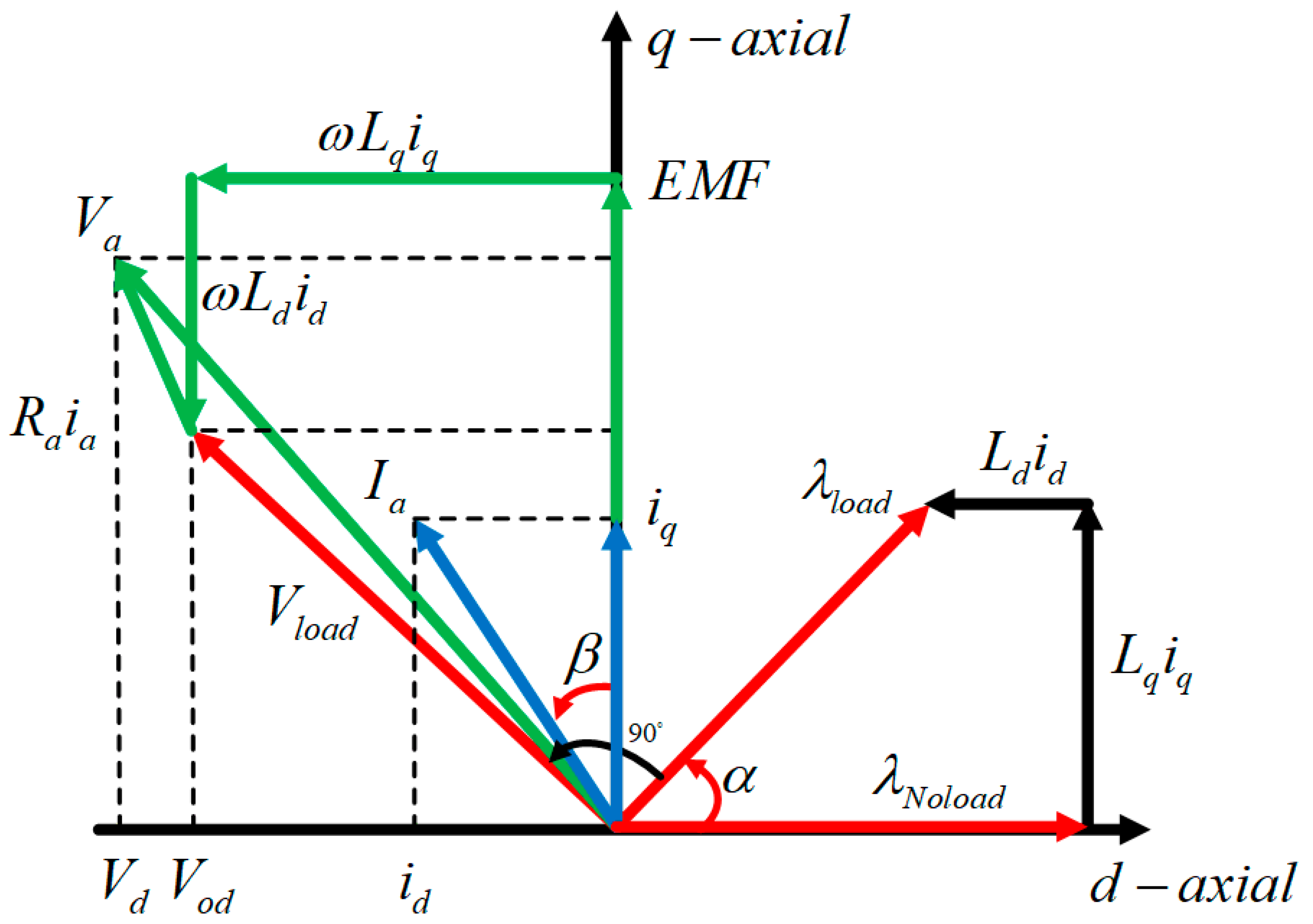
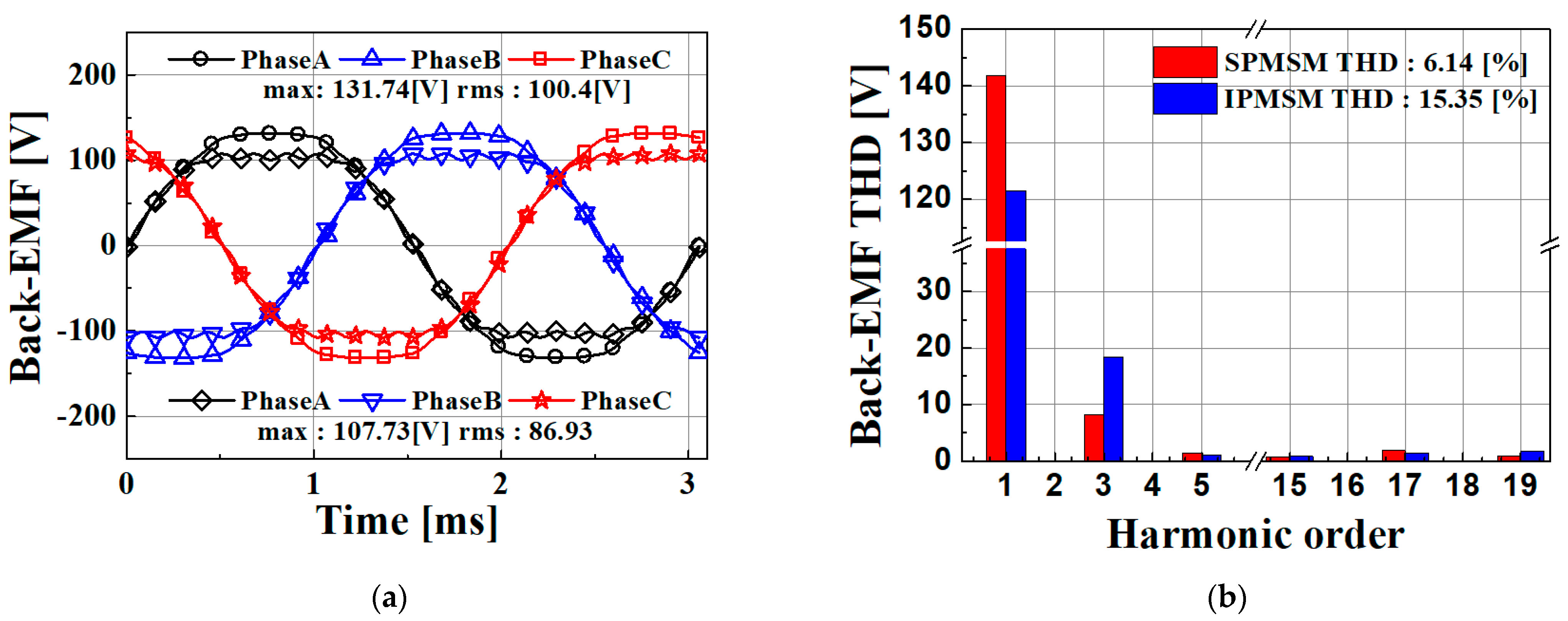
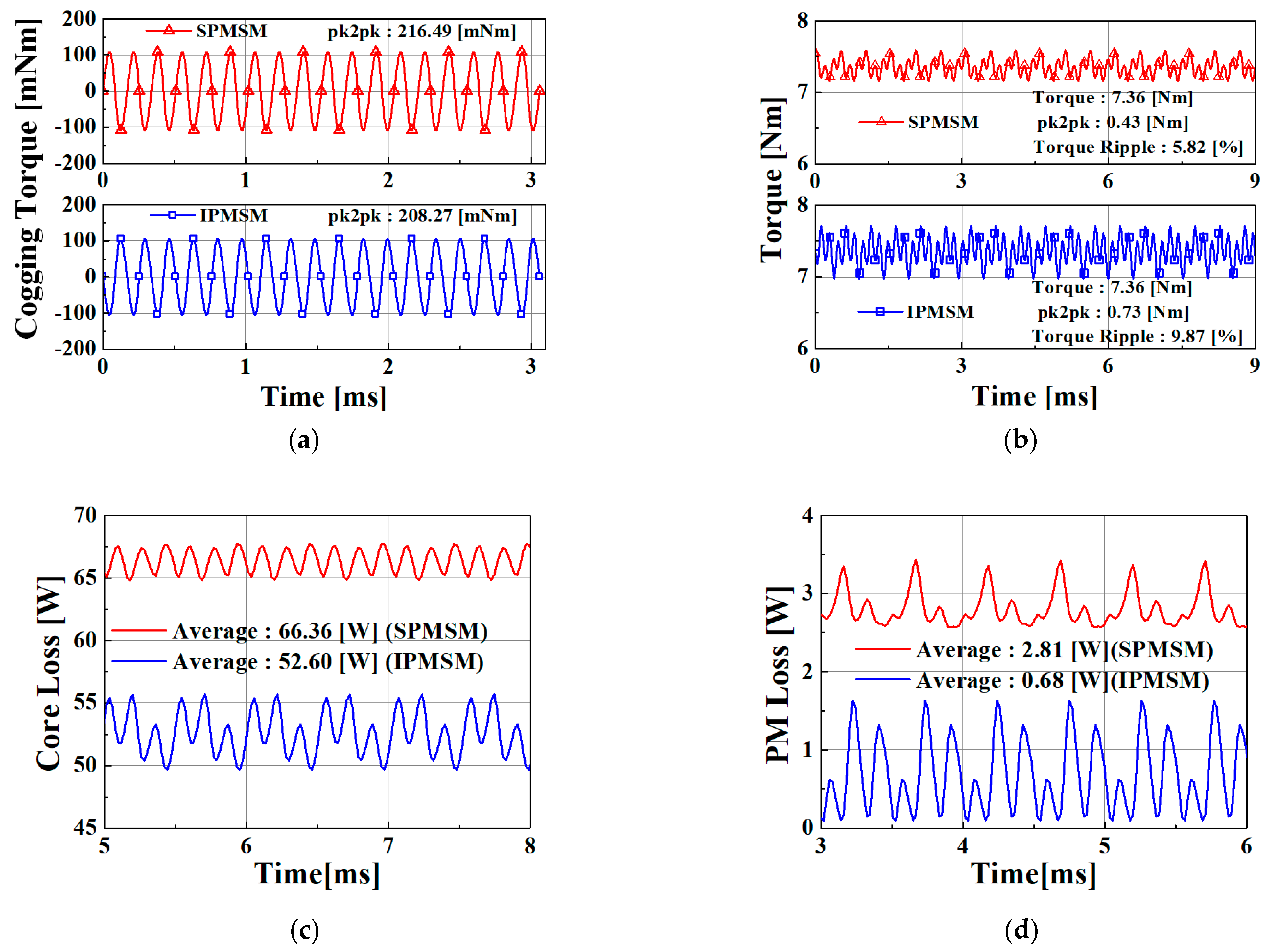
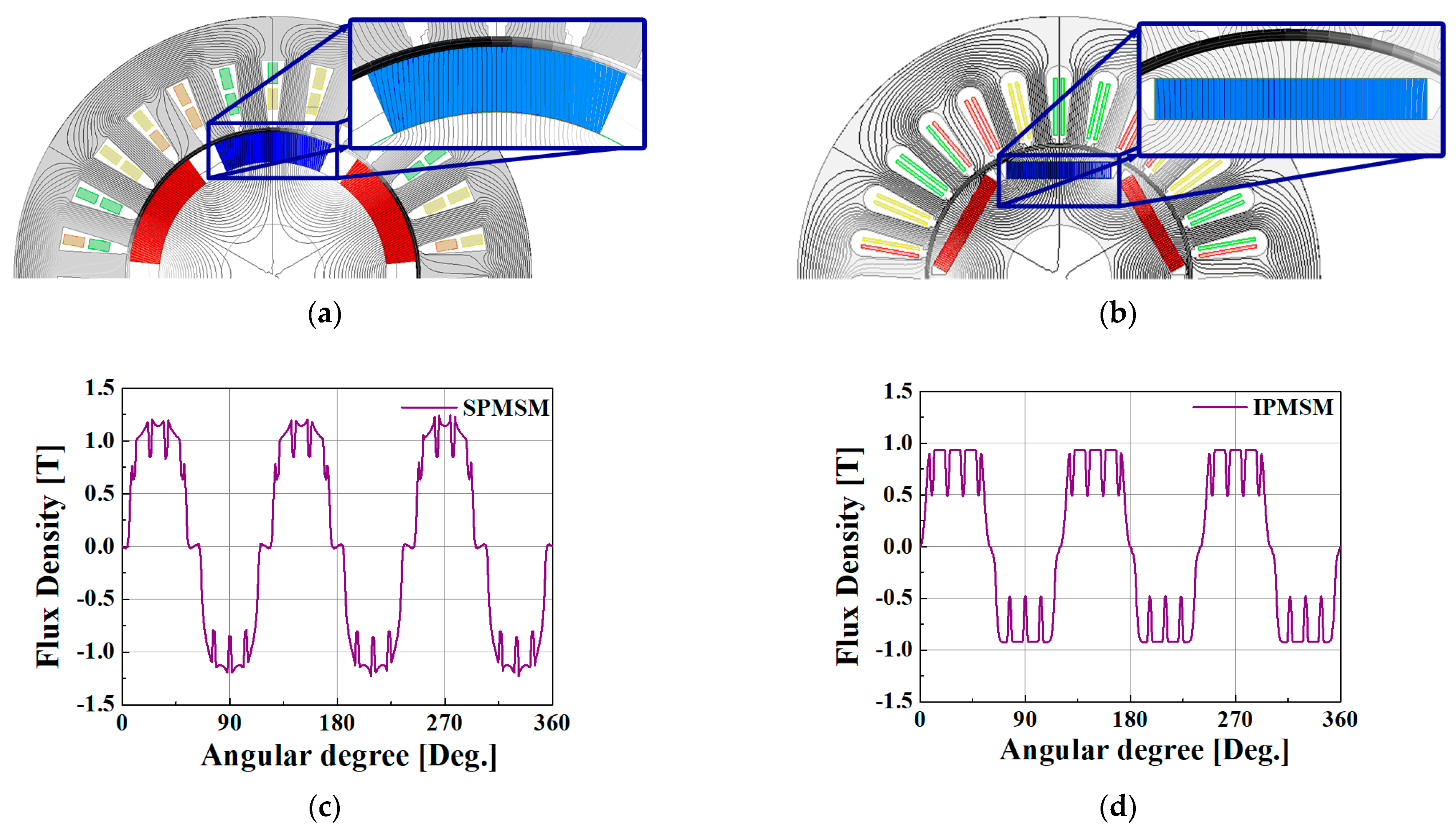
2.3. Characteristics of a PMSM
3. Results and Discussion
3.1. Comparison of the Electromagnetic Characteristics According to the Rotor Type
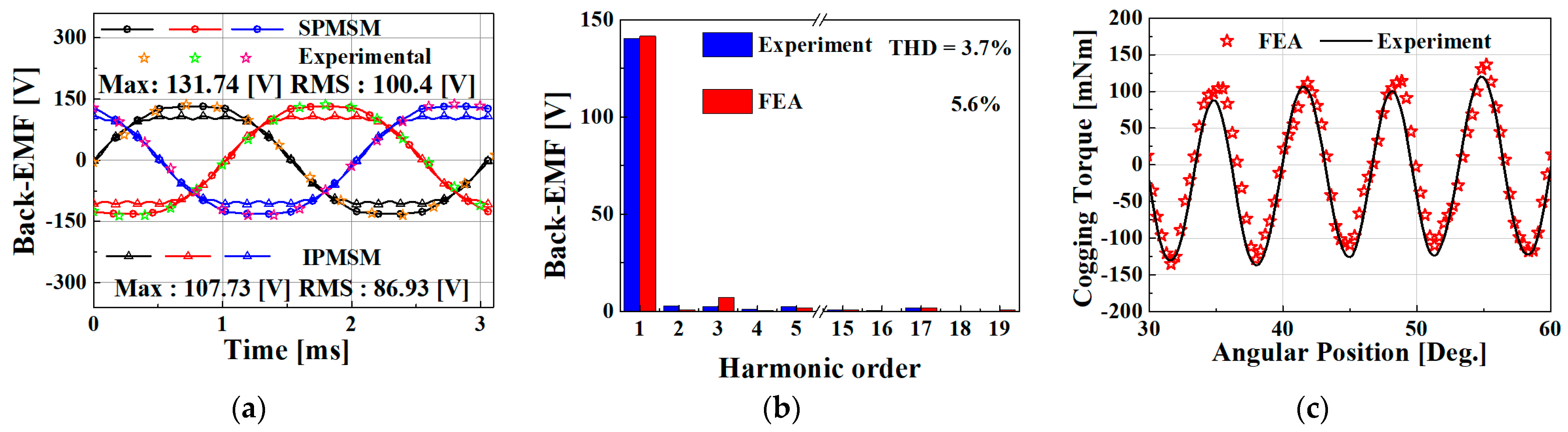
3.2. Experimental Result and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Choi, J.-Y.; Park, H.-I.; Jang, S.-M.; Lee, S.-H. Design and Analysis of Surface-Mounted PM Motor of Compressor for Electric Vehicles Applications according to Slot/Pole Combinations. Trans. Korean Inst. Electr. Eng. 2011, 60, 1846–1857. [Google Scholar] [CrossRef]
- Duane, H. Brushless Permanent Motor Design. Ph.D. Thesis, Maine University, Orono, ME, USA, 2010. [Google Scholar]
- Bae, J.N. Permanent Magnet Synchronous Machine Design through and Automatic Selection of the Specific Loadings. Ph.D. Thesis, Hanyang University, Seoul, Republic of Korea, 2010. [Google Scholar]
- Cho, S.-K.; Jung, K.-H.; Choi, J.-Y. Design Optimization of Interior Permanent Magnet Synchronous Motor for Electric Compressors of Air-Conditioning Systems Mounted on EVs and HEVs. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Shin, K.-H.; Choi, J.-Y.; Cho, H.-W. Characteristic Analysis of Interior Permanent-Magnet Synchronous Machine with Fractional-Slot Concentrated Winding Considering Nonlinear Magnetic Saturation. IEEE Trans. Appl. Supercond. 2016, 26, 1–4. [Google Scholar] [CrossRef]
- Tomigashi, Y.; Ueta, T.; Yokotani, K.; Ikegami, K. Reducing Cogging Torque of Interior Permanent Magnet Synchronous Motor for Electric Bicycles. In Proceedings of the IEEE European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Studer, C.; Keyhani, A.; Sebastian, T.; Murthy, S.K. Study of cogging torque in permanent magnet machines. In Proceedings of the Industry Applications Conference, 1997. Thirty-Second IAS Annual Meeting, IAS’97, Conference Record of the 1997 IEEE, New Orleans, LA, USA, 5–9 October 1997; Volume 1, pp. 42–49. [Google Scholar]
- Kim, B.-T.; Kwon, B.-I.; Park, S.-C.; Kwon, B.-I. Reduction of electromagnetic force harmonics in asynchronous traction motor by adapting the rotor slot number. IEEE Trans. Magn. 1999, 35, 3742–3744. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Dai, M.; Keyhani, A.; Sebastian, T. Torque Ripple Analysis of a PM Brushless DC Motor Using Finite Element Method. IEEE Trans. Energy Convers. 2004, 19, 40–45. [Google Scholar] [CrossRef]
- Fang, L.; Jung, J.-W.; Hong, J.-P.; Lee, J.-H. Study on High-Efficiency Performance in Interior Permanent-Magnet Synchronous Motor with Double-Layer PM Design. IEEE Trans. Magn. 2008, 44, 4393–4396. [Google Scholar] [CrossRef]
- Ge, H.; Miao, Y.; Bilgin, B.; Nahid-Mobarakeh, B.; Emadi, A. Speed Range Extended Maximum Torque Per Ampere Control for PM Drives Considering Inverter and Motor Nonlinearities. IEEE Trans. Power Electron. 2016, 32, 7151–7159. [Google Scholar] [CrossRef]
- Mohamed, Y.A.I.; Lee, T.K. Adaptive self-tuning MTPA vector controller for IPMSM drive system. IEEE Trans. Energy Convers. 2006, 21, 636–644. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated torque | 6.6 Nm | Input voltage | 288 |
| Rated power | 4.5 KW | PWM | SVPWM |
| Rated speed | 6540 rpm | Voltage limit | 150 (Vmax) |
| Maximum speed | 8000 rpm | Current density | 20 (Arms/m2) |
| Stack length | 100 mm | Efficiency | 92% |
| Air gap | 0.5 mm |
| Parameters | SPMSM | IPMSM |
|---|---|---|
| Inner diameter of the rotor (mm) | 55.6 | 50 |
| Inner diameter of the stator (mm) | 57 | 51 |
| Outer diameter of the stator (mm) | 100 | 100 |
| Stack length (mm) | 50 | 50 |
| PM thickness (mm) | 5.8 | 3 |
| Amount of magnet (g) | 270 | 130 |
| PM material | NdFe42 | NdFe42 |
| Core material | 35PN250 | 35PN250 |
| Turn | 7 | 8 |
| Parameters | SPMSM | IPMSM |
|---|---|---|
| Output torque (Nm) | 7.35 | 7.36 |
| Input current (A) | 16.83 | 18.53 |
| Power (W) | 5039 | 5039 |
| Core loss (W) | 66.36 | 52.6 |
| PM loss (W) | 2.81 | 0.68 |
| Copper loss (W) | 265.7 | 368 |
| Current density (A/mm2) | 16.74 | 18.43 |
| Efficiency (%) | 93.8 | 92.3 |
| Torque density (Nm/Kg) | 27.22 | 56.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, W.-S.; Lee, H.-K.; Lee, Y.-K.; Kim, S.-M.; Lee, J.-I.; Choi, J.-Y. Analysis and Comparison of Permanent Magnet Synchronous Motors According to Rotor Type under the Same Design Specifications. Energies 2023, 16, 1306. https://doi.org/10.3390/en16031306
Jung W-S, Lee H-K, Lee Y-K, Kim S-M, Lee J-I, Choi J-Y. Analysis and Comparison of Permanent Magnet Synchronous Motors According to Rotor Type under the Same Design Specifications. Energies. 2023; 16(3):1306. https://doi.org/10.3390/en16031306
Chicago/Turabian StyleJung, Woo-Sung, Hoon-Ki Lee, Young-Keun Lee, Su-Min Kim, Jeong-In Lee, and Jang-Young Choi. 2023. "Analysis and Comparison of Permanent Magnet Synchronous Motors According to Rotor Type under the Same Design Specifications" Energies 16, no. 3: 1306. https://doi.org/10.3390/en16031306
APA StyleJung, W.-S., Lee, H.-K., Lee, Y.-K., Kim, S.-M., Lee, J.-I., & Choi, J.-Y. (2023). Analysis and Comparison of Permanent Magnet Synchronous Motors According to Rotor Type under the Same Design Specifications. Energies, 16(3), 1306. https://doi.org/10.3390/en16031306