
Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements


Abstract
1. Introduction
2. Methodology
2.1. The Applied Iron-Loss Model
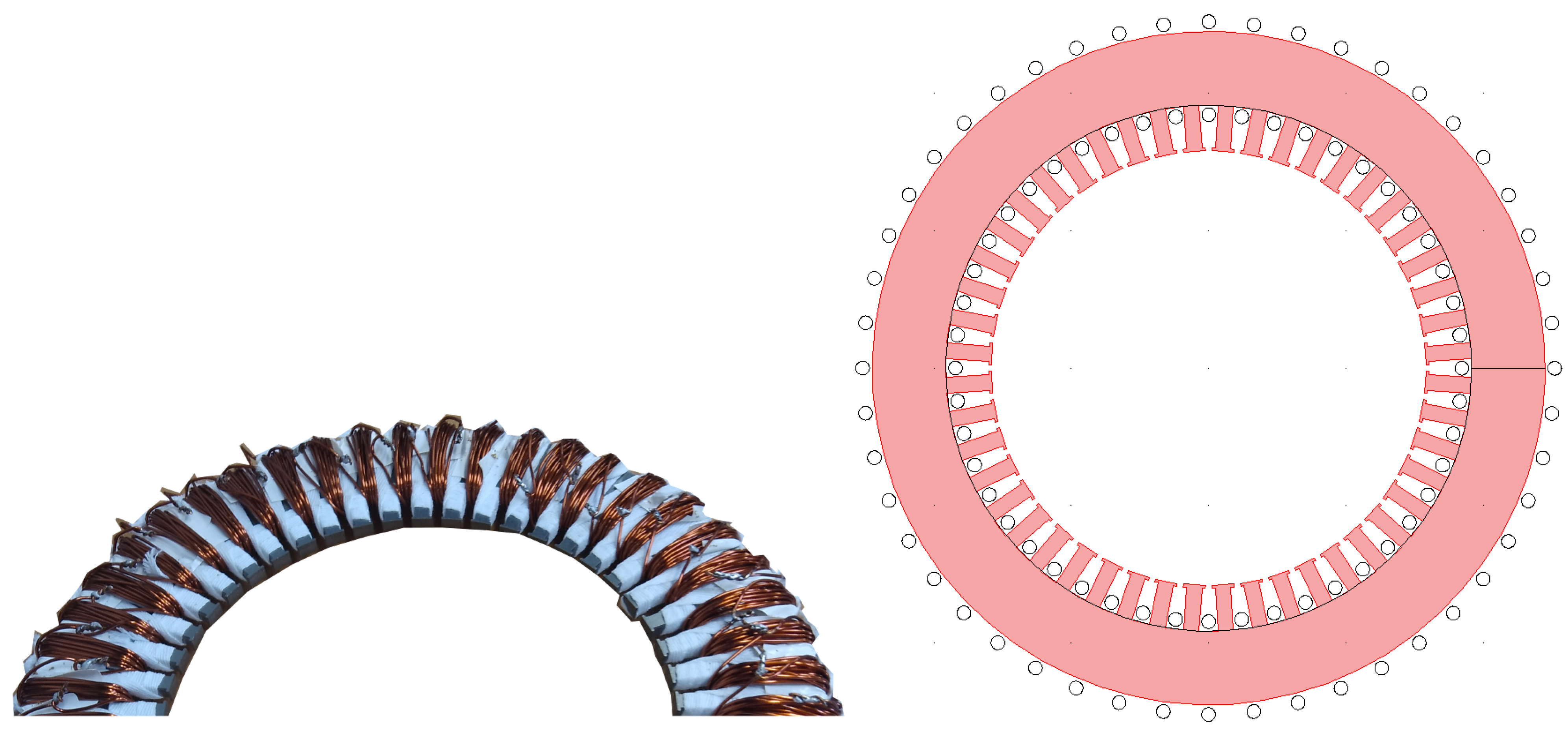
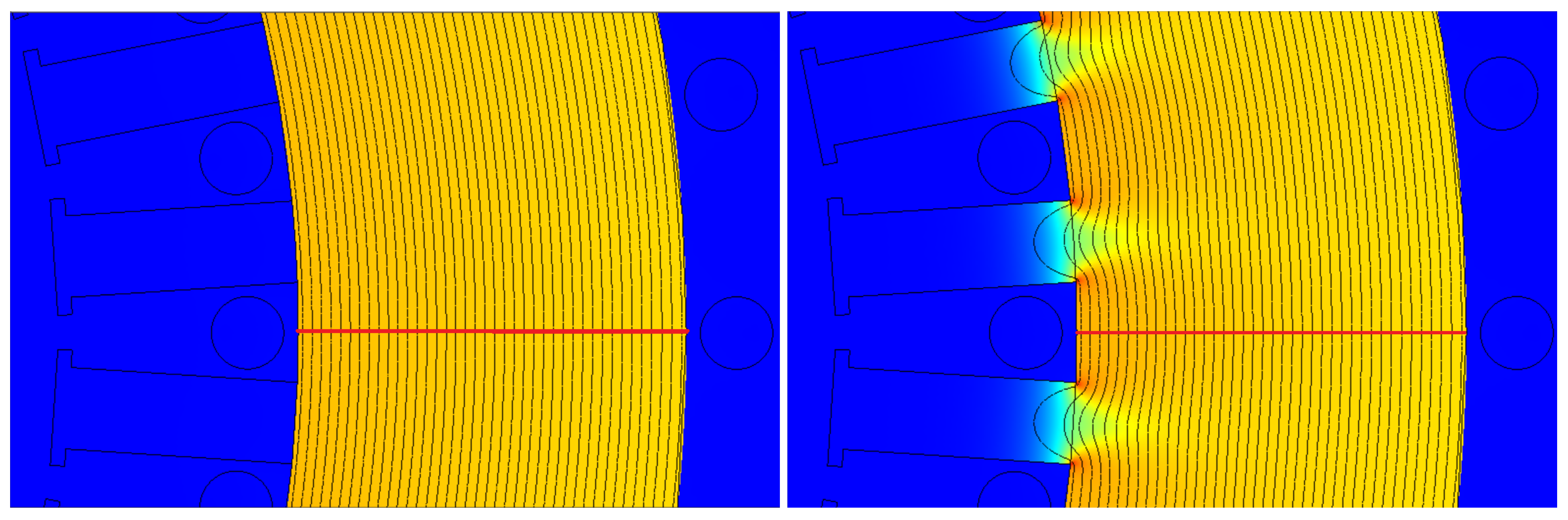
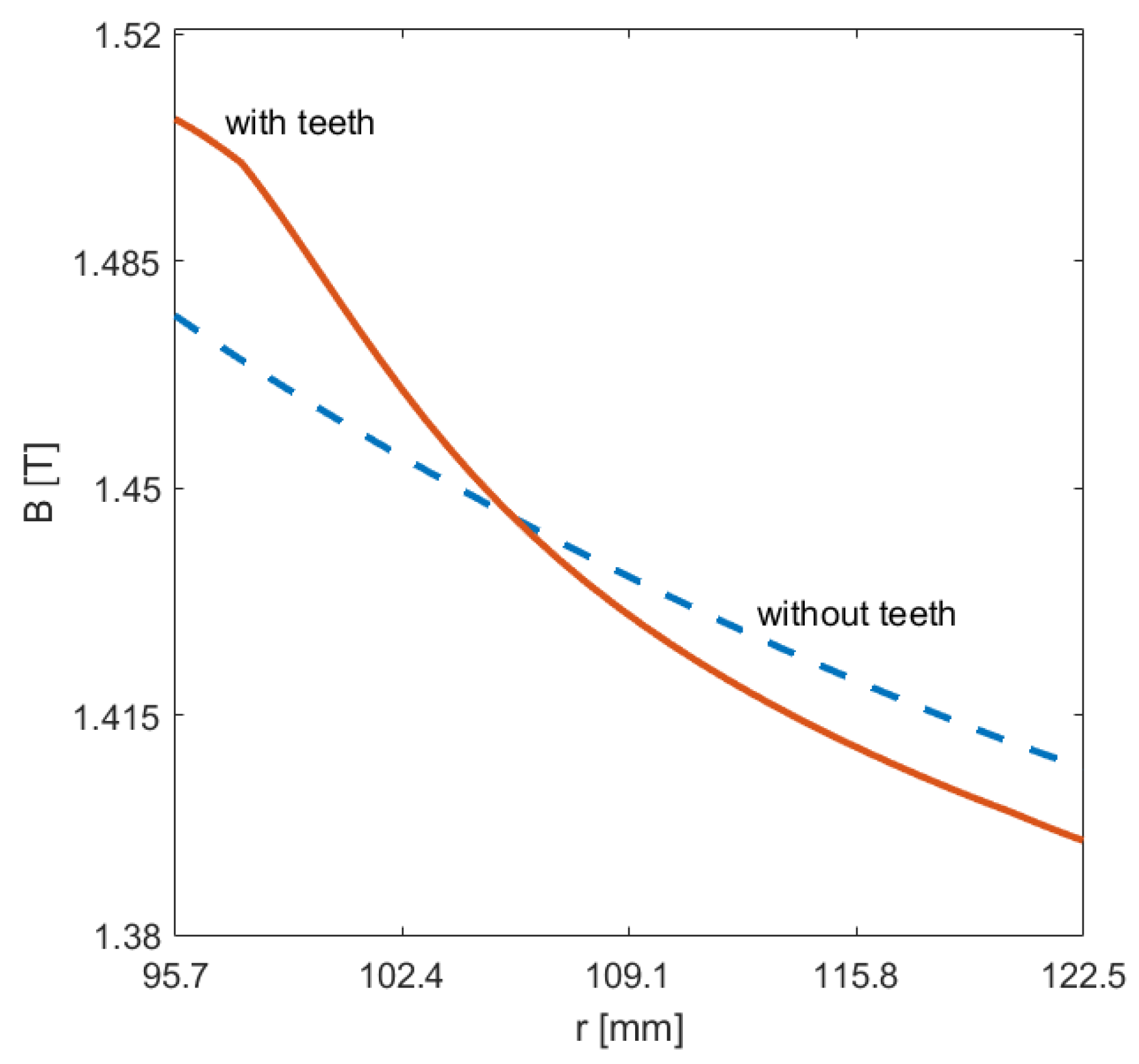
2.2. Finite-Element-Method-Based Design of the Measurements
3. Measurement Results
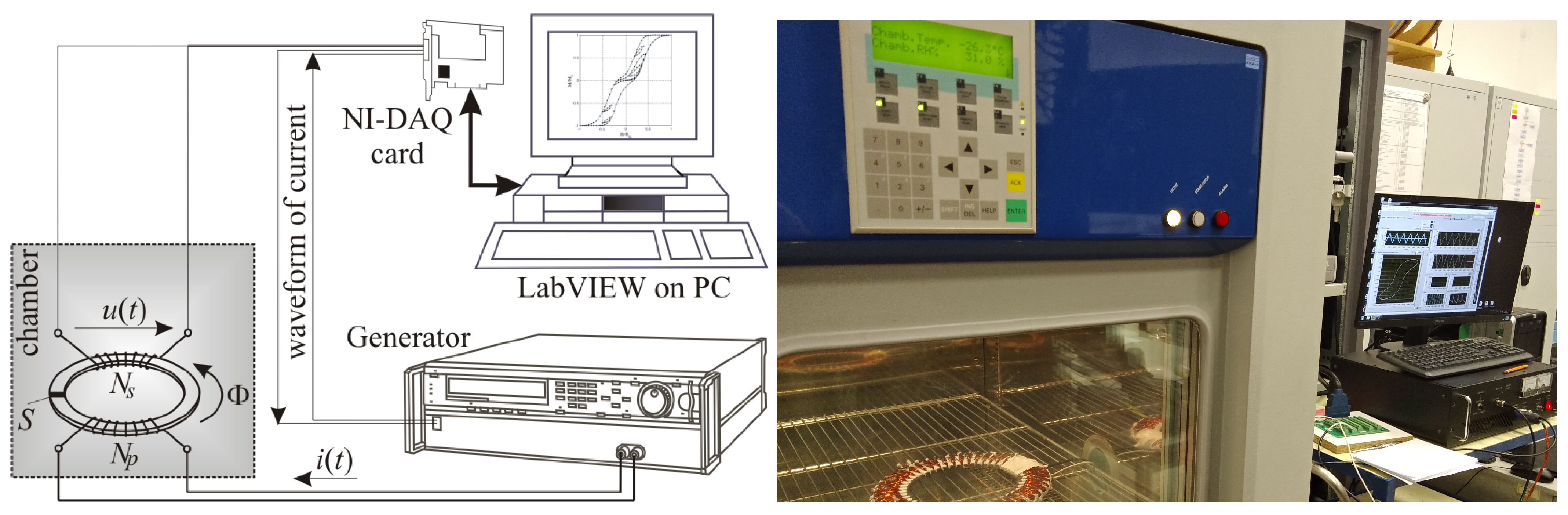
3.1. Measurement System
3.2. The Examined Material and the Measurement Results
4. Analysis of Characteristics in the Applied Ferromagnetic Loss Models
4.1. Characteristics of the First Analytical Approach
4.2. Simplified Material Model
4.3. Temperature-Dependent Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bramerdorfer, G.; Tapia, J.A.; Pyrhönen, J.J.; Cavagnino, A. Modern electrical machine design optimization: Techniques, trends, and best practices. IEEE Trans. Ind. Electron. 2018, 65, 7672–7684. [Google Scholar] [CrossRef]
- Yang, Y.; Bianchi, N.; Bacco, G.; Zhang, S.; Zhang, C. Methods to reduce the computational burden of robust optimization for permanent magnet motors. IEEE Trans. Energy Convers. 2020, 35, 2116–2128. [Google Scholar] [CrossRef]
- Oliveri, A.; Lodi, M.; Storace, M. Nonlinear models of power inductors: A survey. Int. J. Circuit Theory Appl. 2022, 50, 2–34. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Zăvoianu, A.C. Surrogate-based multi-objective optimization of electrical machine designs facilitating tolerance analysis. IEEE Trans. Magn. 2017, 53, 1–11. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust design optimization and emerging technologies for electrical machines: Challenges and open problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]
- Krings, A.; Soulard, J. Overview and comparison of iron loss models for electrical machines. J. Electr. Eng. 2010, 10, 8. [Google Scholar]
- Krings, A.; Nategh, S.; Stening, A.; Grop, H.; Wallmark, O.; Soulard, J. Measurement and modeling of iron losses in electrical machines. In Proceedings of the 5th International Conference Magnetism and Metallurgy WMM’12, Ghent, Belgium, 20–22 June 2012; Gent University: Ghent, Belgium, 2012; pp. 101–119. [Google Scholar]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Rasilo, P.; Dlala, E.; Fonteyn, K.; Pippuri, J.; Belahcen, A.; Arkkio, A. Model of laminated ferromagnetic cores for loss prediction in electrical machines. IET Electr. Power Appl. 2011, 5, 580–588. [Google Scholar] [CrossRef]
- Zirka, S.; Moroz, Y.; Steentjes, S.; Hameyer, K.; Chwastek, K.; Zurek, S.; Harrison, R. Dynamic magnetization models for soft ferromagnetic materials with coarse and fine domain structures. J. Magn. Magn. Mater. 2015, 394, 229–236. [Google Scholar] [CrossRef]
- Saeed, S.; Georgious, R.; Garcia, J. Modeling of magnetic elements including losses—Application to variable inductor. Energies 2020, 13, 1865. [Google Scholar] [CrossRef]
- Yang, L.; Ding, B.; Liao, W.; Li, Y. Identification of Preisach Model Parameters Based on an Improved Particle Swarm Optimization Method for Piezoelectric Actuators in Micro-Manufacturing Stages. Micromachines 2022, 13, 698. [Google Scholar] [CrossRef]
- Goetz, S.; Roth, M.; Schleich, B. Early Robust Design—Its Effect on Parameter and Tolerance Optimization. Appl. Sci. 2021, 11, 9407. [Google Scholar] [CrossRef]
- Li, J.; Abdallah, T.; Sullivan, C.R. Improved calculation of core loss with nonsinusoidal waveforms. In Proceedings of the Conference Record of the 2001 IEEE Industry Applications Conference. 36th IAS Annual Meeting (Cat. No. 01CH37248), Chicago, IL, USA, 30 September–4 October 2001; Volume 4, pp. 2203–2210. [Google Scholar]
- Bramerdorfer, G.; Andessner, D. Accurate and easy-to-obtain iron loss model for electric machine design. IEEE Trans. Ind. Electron. 2016, 64, 2530–2537. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Kitzberger, M.; Wöckinger, D.; Koprivica, B.; Zurek, S. State-of-the-art and future trends in soft magnetic materials characterization with focus on electric machine design–part 1. tm-Tech. Mess. 2019, 86, 540–552. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Kitzberger, M.; Wöckinger, D.; Koprivica, B.; Zurek, S. State-of-the-art and future trends in soft magnetic materials characterization with focus on electric machine design–Part 2. tm-Tech. Mess. 2019, 86, 553–565. [Google Scholar] [CrossRef]
- Jordan, H. Die ferromagnetischen Konstanten für schwache Wechselfelder. Elektr. Nach. Technol. 1924, 1. [Google Scholar]
- Bertotti, G.; Di Schino, G.; Milone, A.F.; Fiorillo, F. On the effect of grain size on magnetic losses of 3% non-oriented SiFe. Le J. De Phys. Colloq. 1985, 46, C6-385. [Google Scholar] [CrossRef]
- Pluta, W.A. Some properties of factors of specific total loss components in electrical steel. IEEE Trans. Magn. 2010, 46, 322–325. [Google Scholar] [CrossRef]
- Kochmann, T. Relationship between rotational and alternating losses in electrical steel sheets. J. Magn. Magn. Mater. 1996, 160, 145–146. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xue, S.; Chu, W.; Feng, J.; Guo, S.; Chen, Z.; Peng, J. Evaluation of iron loss models in electrical machines. IEEE Trans. Ind. Appl. 2018, 55, 1461–1472. [Google Scholar] [CrossRef]
- Akinaga, T.; Staudt, T.; Hoffmann, W.; Soares, C.; De Espindola, A.; Bastos, J. A comparative investigation of iron loss models for electrical machine design using FEA and experimental validation. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 461–466. [Google Scholar]
- Hofmann, M.; Naumoski, H.; Herr, U.; Herzog, H.G. Magnetic properties of electrical steel sheets in respect of cutting: Micromagnetic analysis and macromagnetic modeling. IEEE Trans. Magn. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Németh, Z.; Kuczmann, M. Analysis of Epstein frame by finite element method. Przegląd Elektrotechniczny 2019, 6, 23–26. [Google Scholar] [CrossRef]
- Yamazaki, K. Efficiency analysis of induction motor considering rotor and stator surface loss caused by rotor movement. Int. J. Appl. Electromagn. Mech. 2002, 13, 229–234. [Google Scholar] [CrossRef]
- Chen, J.; Wang, D.; Cheng, S.; Wang, Y.; Zhu, Y.; Liu, Q. Modeling of temperature effects on magnetic property of nonoriented silicon steel lamination. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Xue, S.; Feng, J.; Guo, S.; Chen, Z.; Peng, J.; Chu, W.; Huang, L.; Zhu, Z. Iron loss model under DC bias flux density considering temperature influence. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Popescu, M.; Ionel, D.M.; Boglietti, A.; Cavagnino, A.; Cossar, C.; McGilp, M.I. A general model for estimating the laminated steel losses under PWM voltage supply. IEEE Trans. Ind. Appl. 2010, 46, 1389–1396. [Google Scholar] [CrossRef]
- Popescu, M.; Miller, T.; McGilp, M.; Ionel, D.M.; Dellinger, S.J.; Heidemann, R. On the physical basis of power losses in laminated steel and minimum-effort modeling in an industrial design environment. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 60–66. [Google Scholar]
- Ionel, D.M.; Popescu, M.; Dellinger, S.J.; Miller, T.; Heideman, R.J.; McGilp, M.I. On the variation with flux and frequency of the core loss coefficients in electrical machines. IEEE Trans. Ind. Appl. 2006, 42, 658–667. [Google Scholar] [CrossRef]
- Chen, Y.; Pillay, P. An improved formula for lamination core loss calculations in machines operating with high frequency and high flux density excitation. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No. 02CH37344), Pittsburgh, PA, USA, 13–18 October 2002; Volume 2, pp. 759–766. [Google Scholar]
- Li, J.; Yang, Q.; Li, Y.; Zhang, C.; Qu, B.; Cao, L. Anomalous loss modeling and validation of magnetic materials in electrical engineering. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Xue, S.; Feng, J.; Guo, S.; Peng, J.; Chu, W.; Zhu, Z. A new iron loss model considering temperature influences of hysteresis and eddy current losses separately in electrical machines. IEEE Trans. Magn. 2018, 54, 8100310. [Google Scholar] [CrossRef]
- Kuczmann, M.; Iványi, A. The Finite Element Method in Magnetics; Akadémiai Kiadó: Budapest, Hungary, 2008. [Google Scholar]
- COMSOL Multiphysics. Available online: https://www.comsol.com/ (accessed on 1 November 2022).
- Kuczmann, M. Fourier transform and controlling of flux in scalar hysteresis measurement. Phys. B Condens. Matter. 2008, 403, 410–413. [Google Scholar] [CrossRef]
- Catalogue Data for M250-35A Steel Sheets. Available online: https://www.tatasteeleurope.com/sites/default/files/m250-35a.pdf (accessed on 1 November 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B [T] | H at 50 Hz (A/m) | P at 50 Hz (W/kg) | P at 100 Hz (W/kg) | P at 200 Hz (W/kg) | P at 400 Hz (W/kg) | P at 1000 Hz (W/kg) | P at 2500 Hz (W/kg) |
|---|---|---|---|---|---|---|---|
| 0.2 | 35.7 | 0.06 | 0.14 | 0.33 | 0.90 | 3.65 | 14.8 |
| 0.4 | 47.5 | 0.21 | 0.51 | 1.23 | 3.24 | 12.7 | 51.7 |
| 0.6 | 60.0 | 0.41 | 1.01 | 2.49 | 6.69 | 26.3 | 113 |
| 0.8 | 77.5 | 0.66 | 1.64 | 4.12 | 11.2 | 45.7 | 208 |
| 1.0 | 107 | 0.98 | 2.41 | 6.14 | 17.1 | 72.6 | 352 |
| 1.2 | 179 | 1.37 | 3.4 | 8.69 | 24.6 | - | - |
| 1.4 | 642 | 2.00 | 4.83 | 12.4 | 35.1 | - | - |
| 1.6 | 4030 | 2.65 | - | - | - | - | - |
| 1.8 | 11,700 | 3.06 | - | - | - | - | - |
| B (T) | P at 50 Hz (W/kg) | P at 100 Hz (W/kg) | P at 200 Hz (W/kg) |
|---|---|---|---|
| 0.2 | 0.11 (83%) | 0.26 (85%) | 0.71 (115%) |
| 0.4 | 0.37 (76%) | 0.91 (78%) | 2.36 (92%) |
| 0.6 | 0.66 (61%) | 1.79 (77%) | 4.65 (87%) |
| 0.8 | 1.09 (65%) | 2.91 (77%) | 7.68 (86%) |
| 1.0 | 1.44 (47%) | 4.24 (76%) | 11.28 (84%) |
| 1.2 | 2.12 (55%) | 5.79 (70%) | 14.70 (69%) |
| B (T) | P at C (W/kg) | P at 20 C (W/kg) | P at 100 C (W/kg) | P at 140 C (W/kg) | P at 180 C (W/kg) |
|---|---|---|---|---|---|
| 0.2 | 0.12 | 0.11 | 0.09 | 0.09 | 0.09 |
| 0.4 | 0.39 | 0.37 | 0.36 | 0.32 | 0.30 |
| 0.6 | 0.72 | 0.66 | 0.68 | 0.65 | 0.65 |
| 0.8 | 1.12 | 1.09 | 1.09 | 1.09 | 1.05 |
| 1.0 | 1.67 | 1.44 | 1.64 | 1.49 | 1.43 |
| 1.2 | 2.19 | 2.12 | 2.02 | 2.01 | 1.97 |
| B (T) | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | 1.2 |
|---|---|---|---|---|---|---|
| P (W/kg) |
| B (T) | |||
|---|---|---|---|
| 0.2 | |||
| 0.4 | |||
| 0.6 | |||
| 0.8 | |||
| 1.0 | |||
| 1.2 |
| B | ||
|---|---|---|
| 0.2 | ||
| 0.4 | ||
| 0.6 | ||
| 0.8 | ||
| 1.0 | ||
| 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuczmann, M.; Orosz, T. Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements. Energies 2023, 16, 1116. https://doi.org/10.3390/en16031116
Kuczmann M, Orosz T. Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements. Energies. 2023; 16(3):1116. https://doi.org/10.3390/en16031116
Chicago/Turabian StyleKuczmann, Miklós, and Tamás Orosz. 2023. "Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements" Energies 16, no. 3: 1116. https://doi.org/10.3390/en16031116
APA StyleKuczmann, M., & Orosz, T. (2023). Temperature-Dependent Ferromagnetic Loss Approximation of an Induction Machine Stator Core Material Based on Laboratory Test Measurements. Energies, 16(3), 1116. https://doi.org/10.3390/en16031116