
Power Management Strategy of Hybrid Fuel Cell Drones for Flight Performance Improvement Based on Various Algorithms



Abstract
:1. Introduction
1.1. Research Background
1.2. Literature Review
1.3. Motivation and Novelty
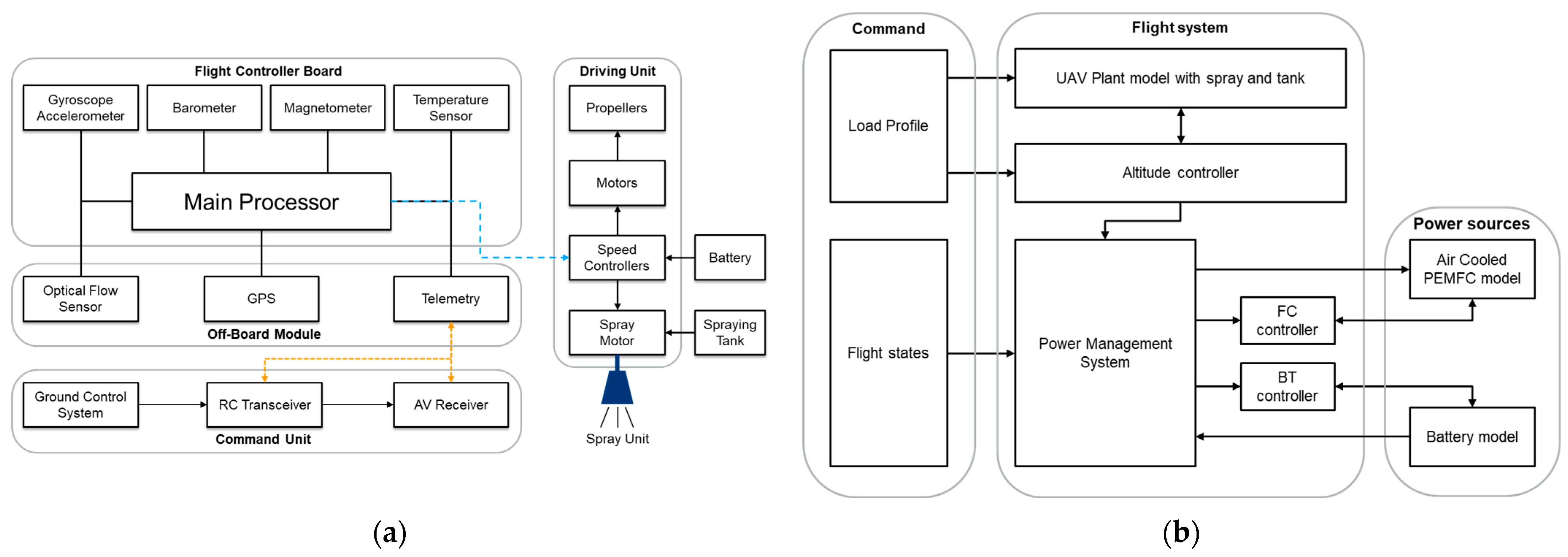
2. Configuration and Modeling of the Drone System
2.1. Modeling of Drone Components
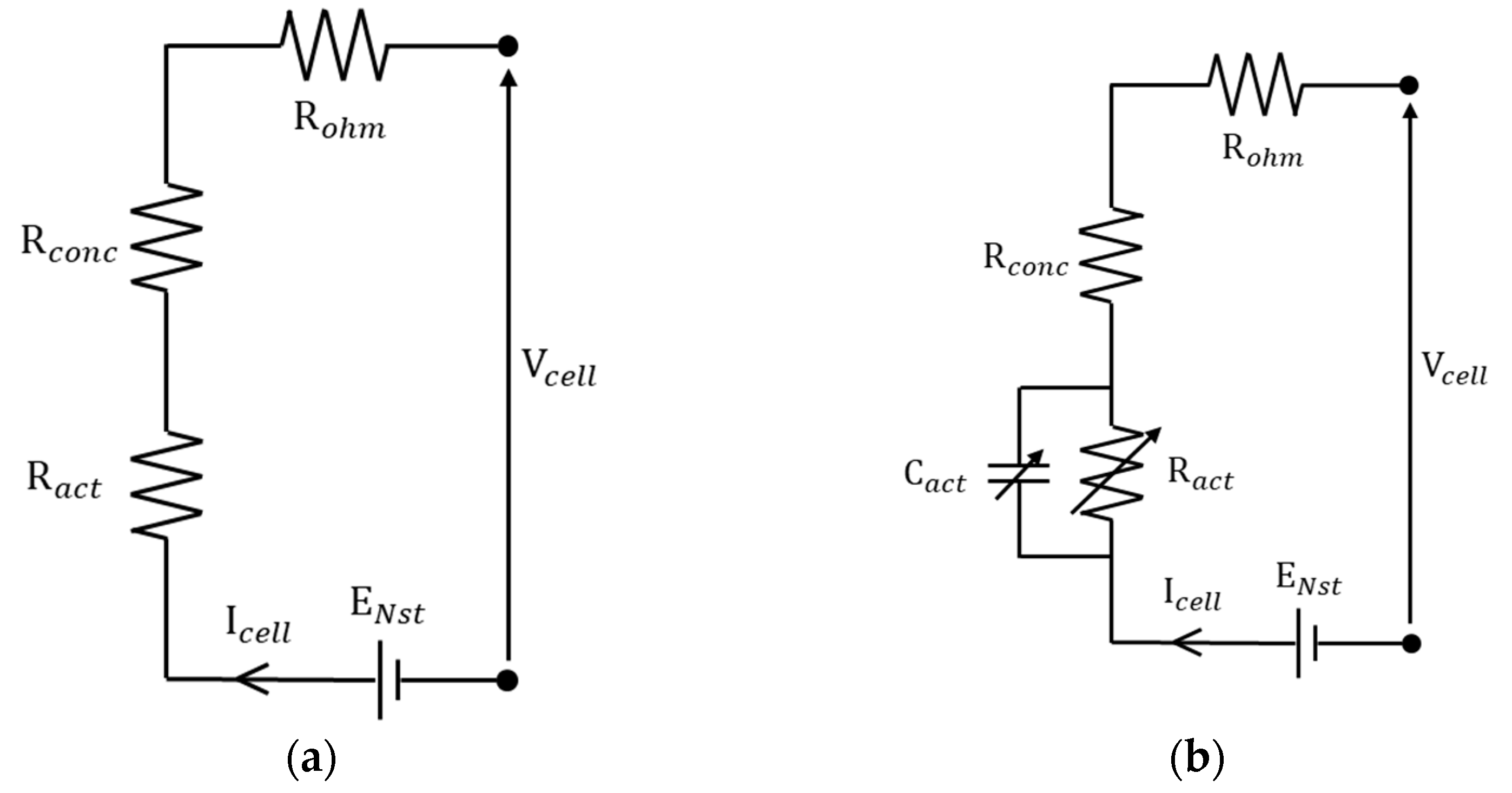
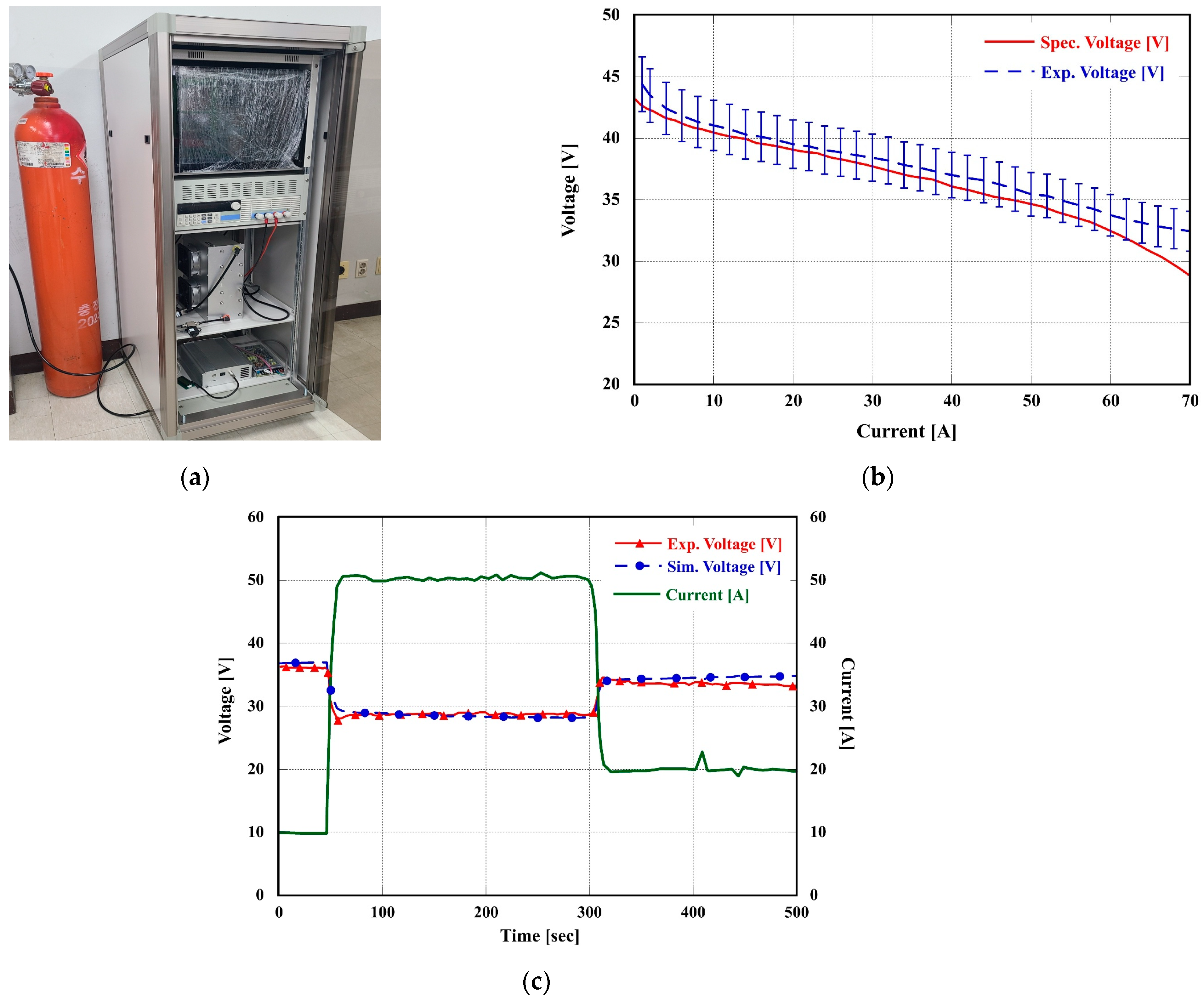
2.1.1. PEMFC
- Electrical model for fuel cell
- Thermal model for fuel cell
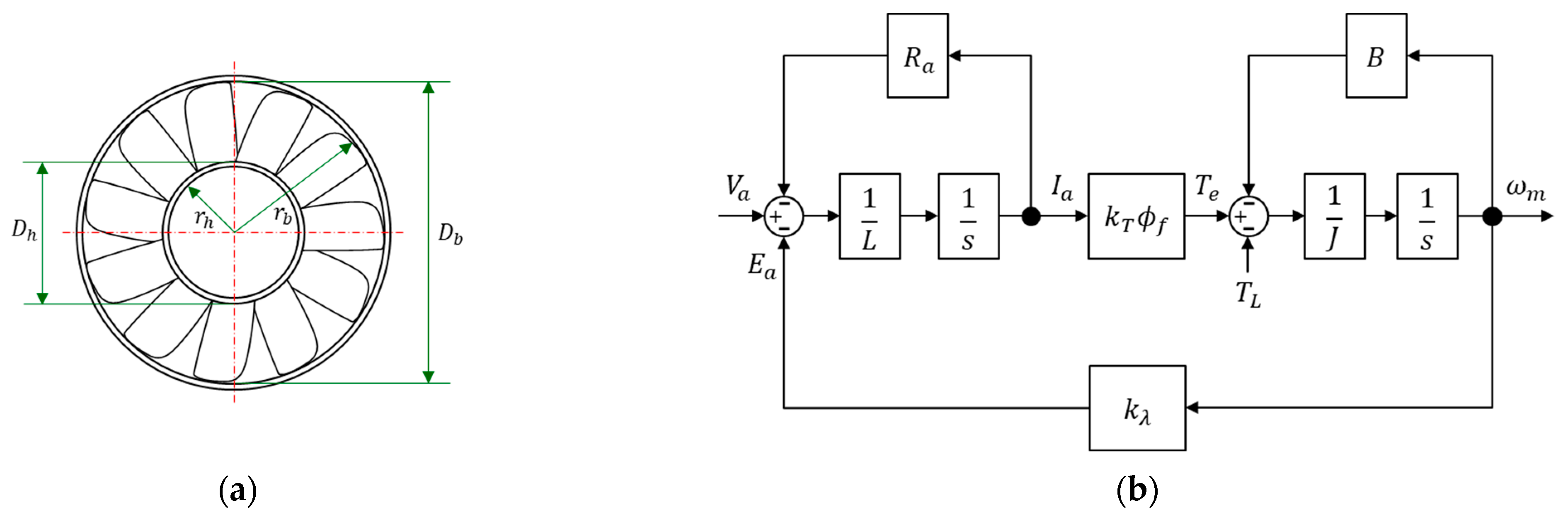
2.1.2. Air Supply and Cooling Fan
2.1.3. Battery
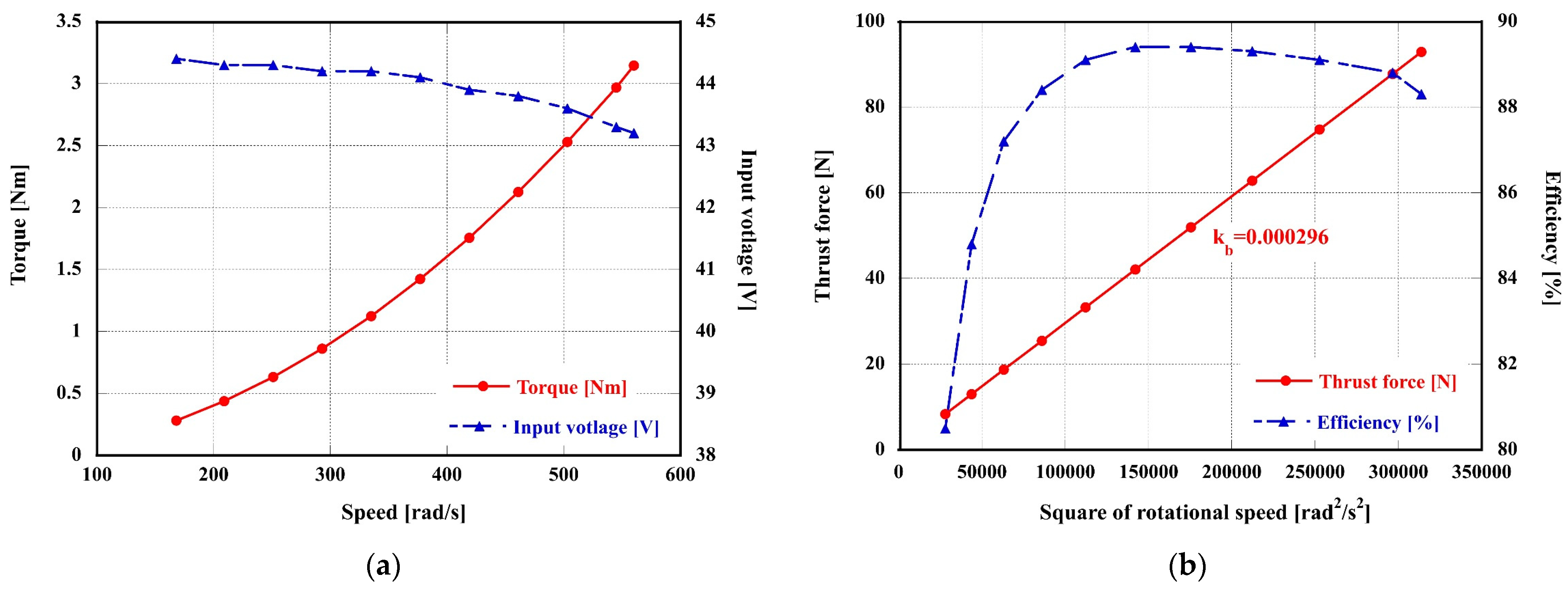
2.1.4. Thrust Motors
2.1.5. Sub-Actuator (Pump)
2.1.6. DC-DC Converter
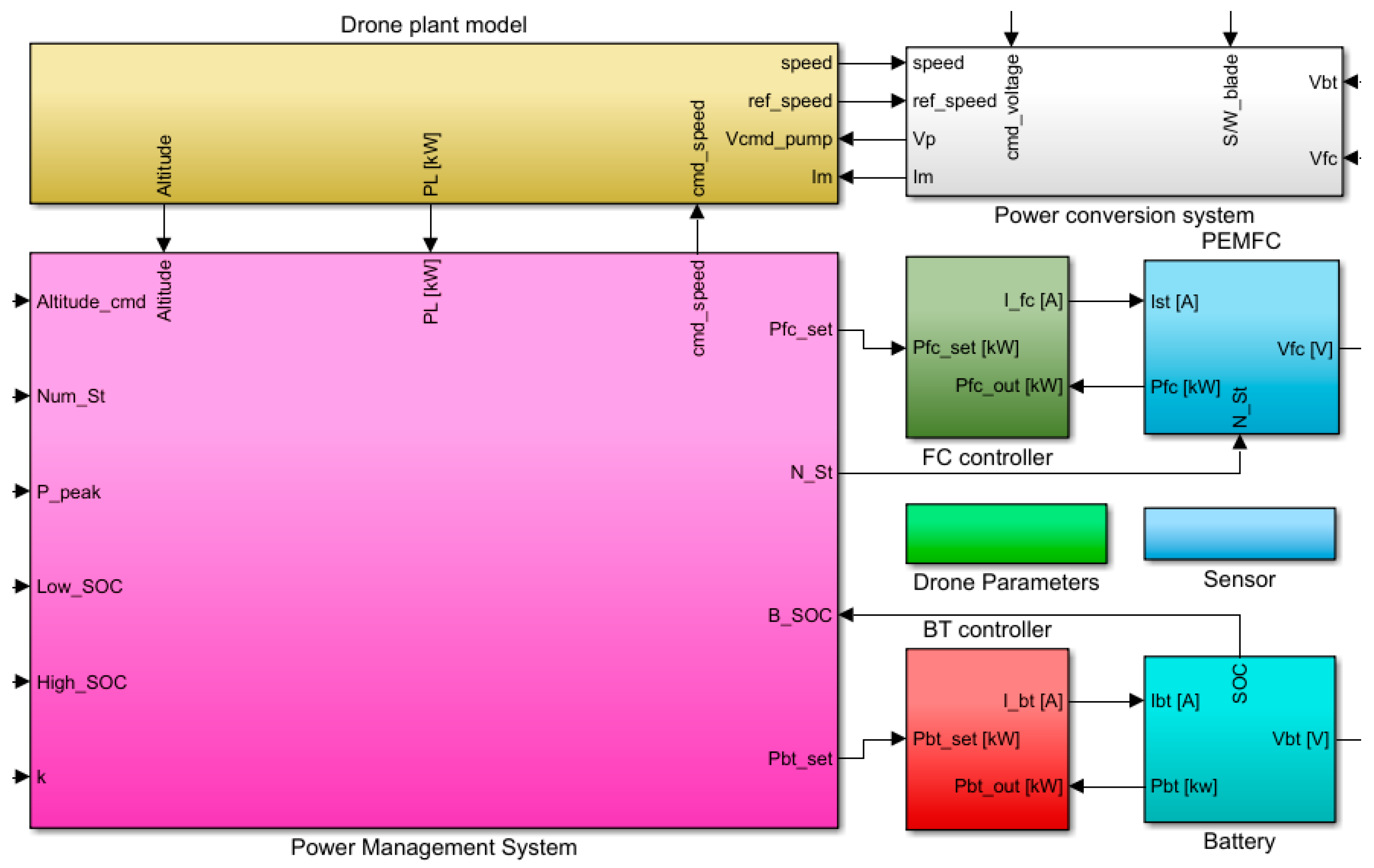
2.2. Integrated Drone System Model
3. Power-Split Strategy
3.1. Control Logic for Components
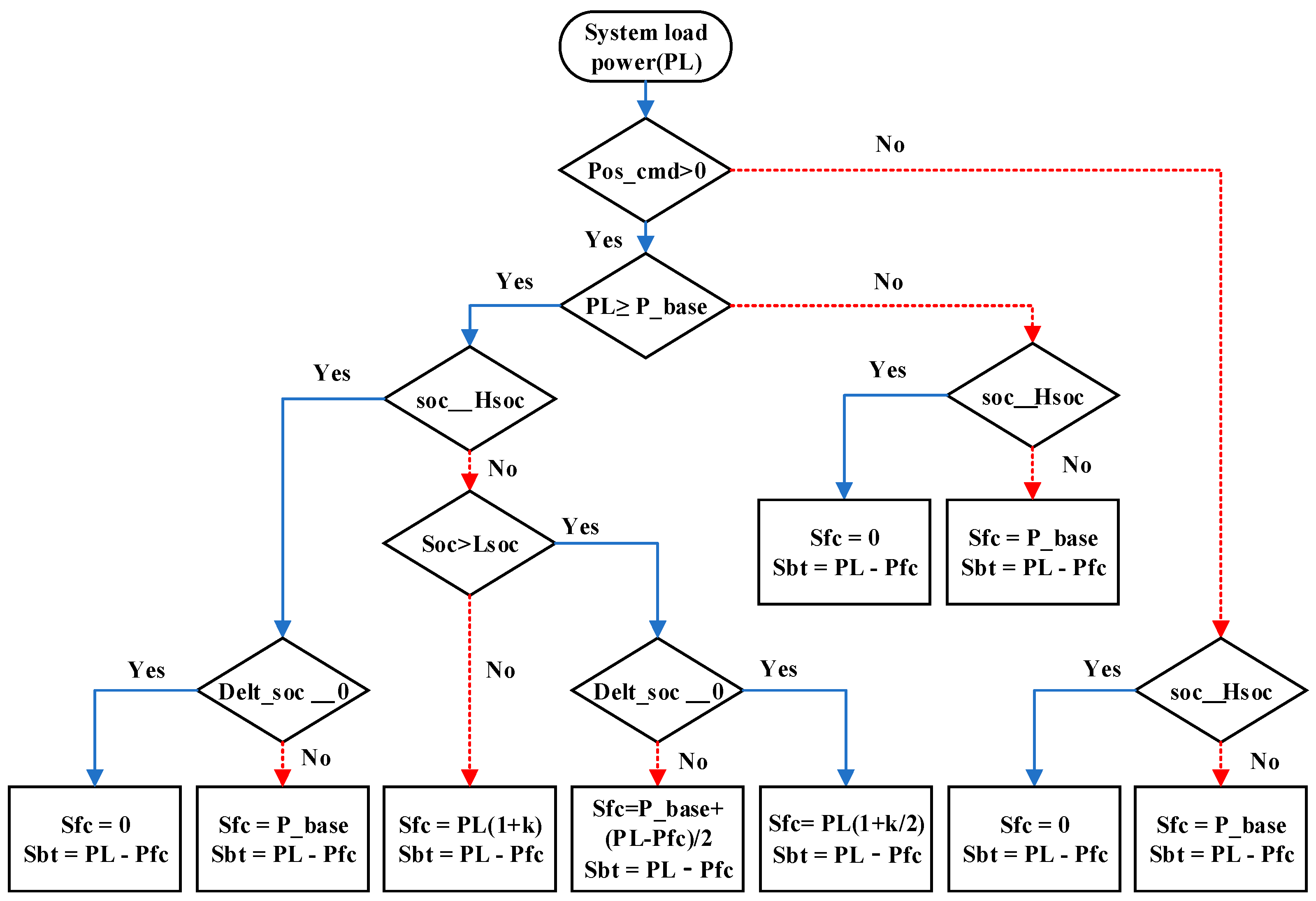
3.2. Rule-Based Power Split Strategy
4. Simulation Results and Discussion
4.1. Simulation Conditions
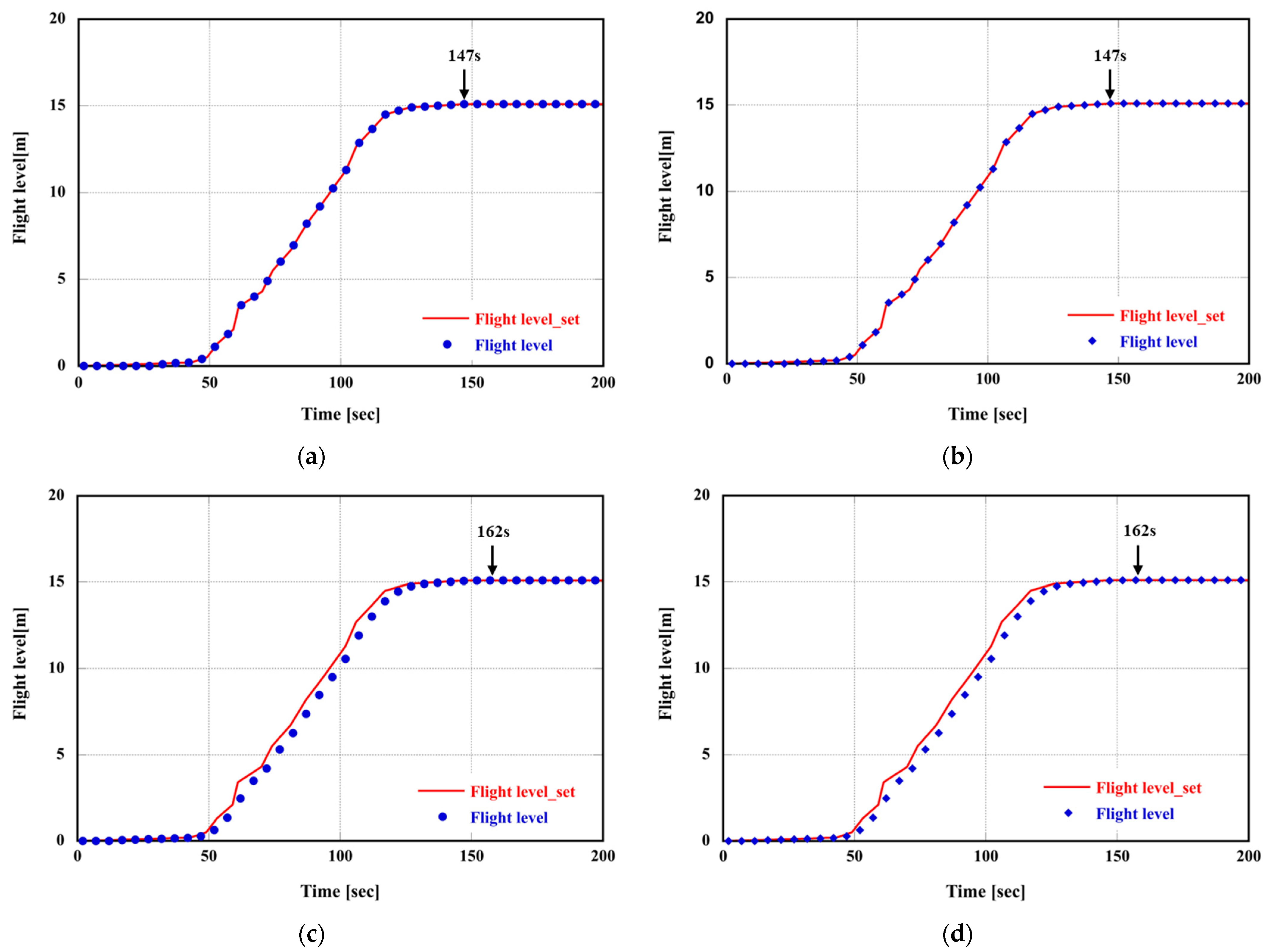
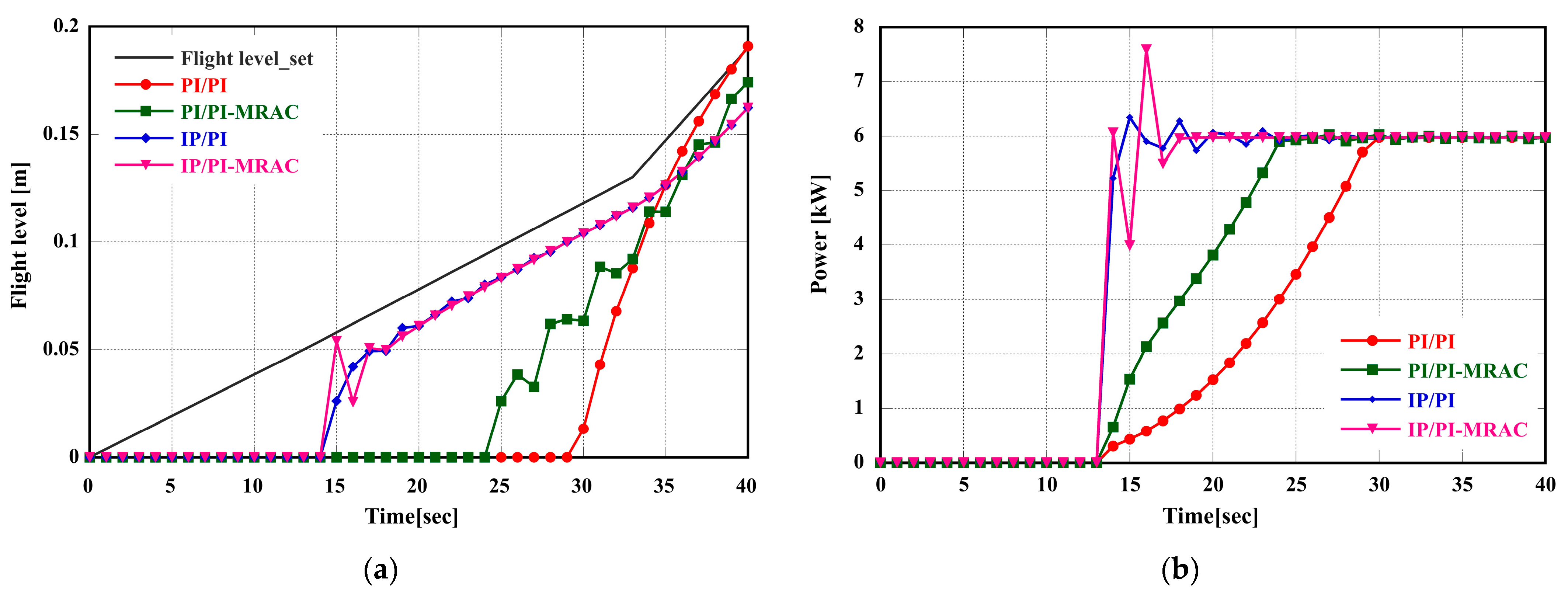
4.2. Flight-Level Dynamic Characteristics in Transient State
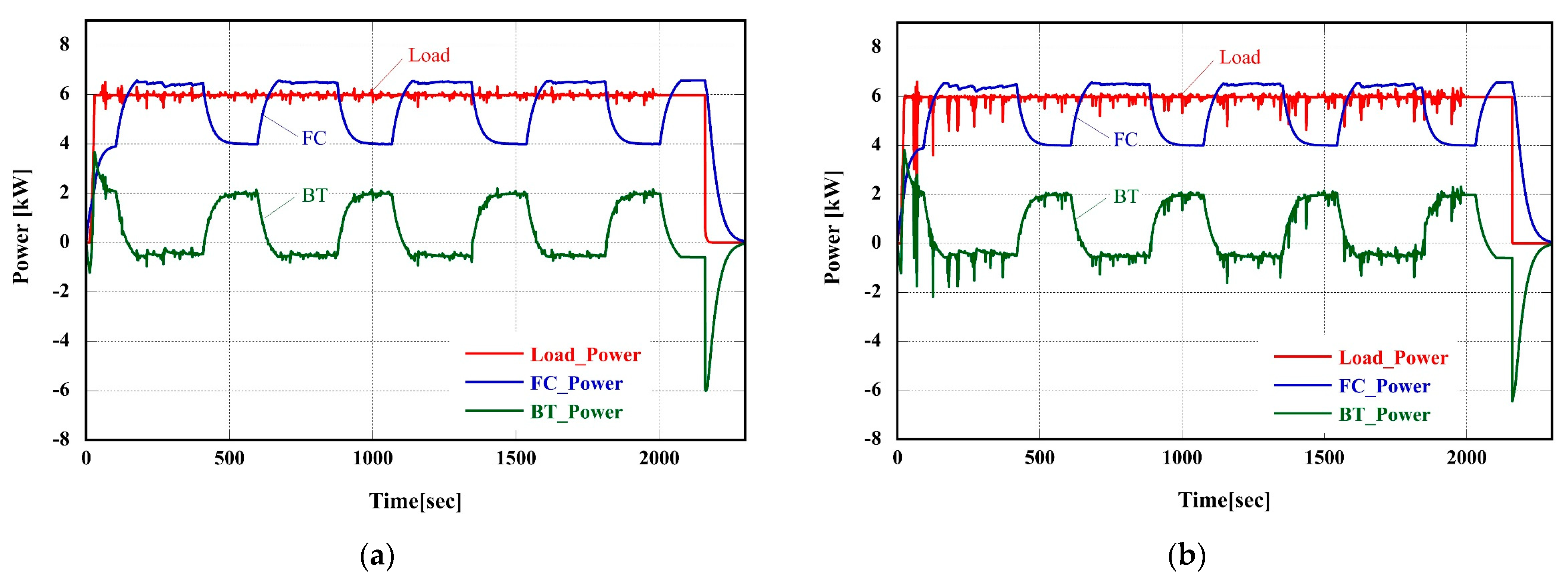
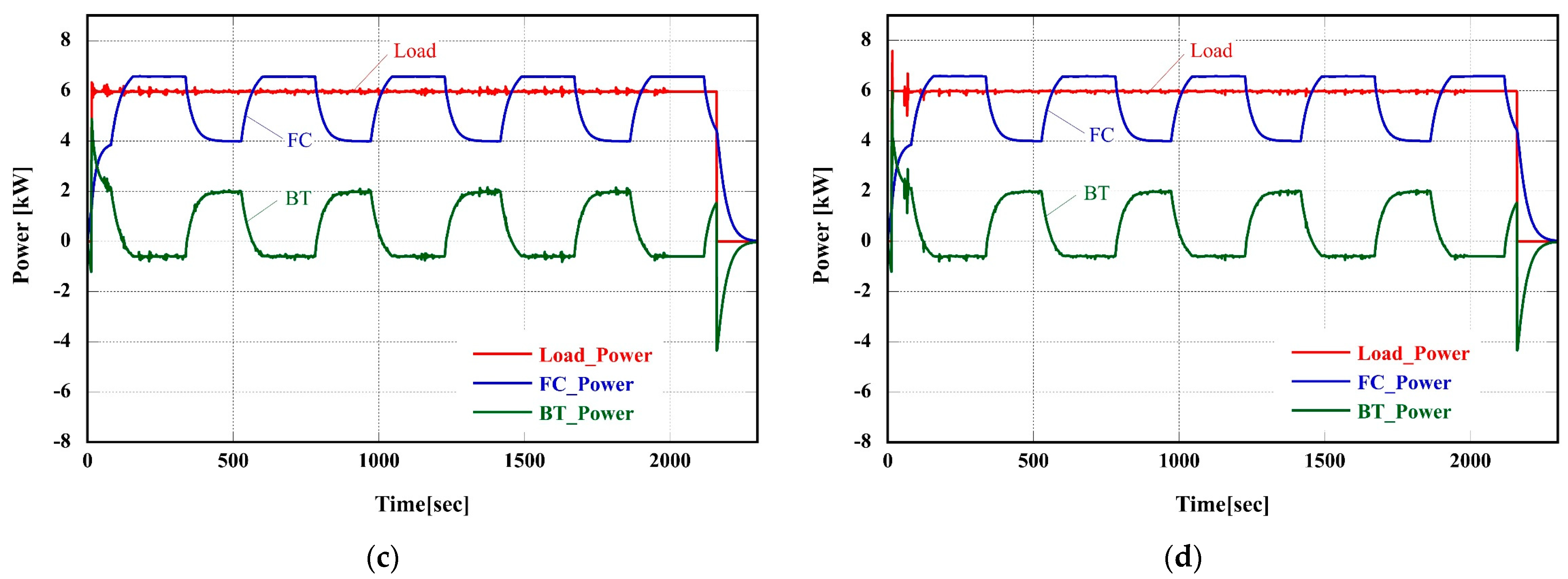
4.3. Power Dynamic Characteristics
4.4. Discussion
4.5. Contribution
5. Conclusions
- PI, IP, and PI-MRAC logic were applied to the flight-level controller and thrust motor, which are major components that greatly affect the dynamic characteristics of the drone system. Additionally, the gain value of the base control logic was maintained consistently to examine the impact of MRAC logic.
- For simulating the flight conditions of the drone, both a smooth mission and a rough mission were selected for the load profile, and a total of eight combinations of control logic was applied for the simulation. The dynamic characteristics of the system were examined from 0 to 200 s for the smooth mission and from 100 to 1950 s for the rough mission.
- In the smooth mission profile analysis, the flight-level signal indicated that PI-based control logic required 147 s to stabilize, while IP-based logic required 162 s. This suggests that the PI control logic possesses superior dynamic characteristics. However, in the context of the rough mission profile, the IP-based control logic effectively smoothed flight-level transitions by curbing abrupt load shifts. This, in turn, mitigated sudden load power changes, offering advantages for the power lifespan and durability of drone systems.
- For quantitatively comparing dynamic characteristics with respect to control logic, ANOVA was performed for output signals of load power presented the results in Section 4.3, which varied from 100 s to 1950 s. The findings revealed that PI/PI-MRAC had the lowest average power consumption at 5.941 kW. However, it exhibited the most significant dynamic fluctuations with a variance of 0.0297 kW2. Conversely, IP/PI-MRAC displayed the least variance at 0.0008 kW2, attributable to the enhanced stabilizing effect of the IP logic on output variations.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Petrone, R.; Steiner, N.Y.; Hissel, D.; Pera, M.C.; Zerhouni, N.; Jemei, S.; Hemmer, S.; Bouwman, R. Ageing integration in PEMFC range extender model for on-board prognostic applications. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; pp. 1–4. [Google Scholar]
- Pourrahmani, H.; Yavarinasab, A.; Siavashi, M.; Matian, M. A review on the proton exchange membrane fuel cells (PEMFCs) water/thermal management: From theory to the current challenges and real-time fault diagnosis methods. Energy Rev. 2022, 1, 100002. [Google Scholar] [CrossRef]
- Ghenai, C.; Bettayeb, M.; Brdjanin, B.; Hamid, A.K. Hybrid solar PV/PEM fuel Cell/Diesel Generator power system for cruise ship: A case study in Stockholm, Sweden. Case Stud. Therm. Eng. 2019, 14, 100497. [Google Scholar] [CrossRef]
- Bayrak, Z.U.; Kaya, U.; Oksuztepe, E. Investigation of PEMFC performance for cruising hybrid powered fixed-wing electric UAV in different temperatures. Int. J. Hydrogen Energy 2020, 45, 7036–7045. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Elouarouar, S.; Medromi, H. Multi-Rotors Unmanned Aerial Vehicles Power Supply and Energy Management. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2022; Volume 336, p. 00068. [Google Scholar]
- Tao, L.E.I.; Zhou, Y.A.N.G.; Zicun, L.I.N.; Zhang, X. State of art on energy management strategy for hybrid-powered unmanned aerial vehicle. Chin. J. Aeronaut. 2019, 32, 1488–1503. [Google Scholar]
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Nishizawa, A.; Kallo, J.; Garrot, O.; Weiss-Ungethüm, J. Fuel cell and Li-ion battery direct hybridization system for aircraft applications. J. Power Source 2013, 222, 294–300. [Google Scholar] [CrossRef]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- Gang, B.G.; Kim, H.; Kwon, S. Ground simulation of a hybrid power strategy using fuel cells and solar cells for high-endurance unmanned aerial vehicles. Energy 2017, 141, 1547–1554. [Google Scholar] [CrossRef]
- Gong, A.; MacNeill, R.; Verstraete, D.; Palmer, J.L. Analysis of a fuel-cell/battery/supercapacitor hybrid propulsion system for a UAV using a hardware-in-the-loop flight simulator. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 9–11 July 2018; pp. 1–17. [Google Scholar]
- Motapon, S.N.; Dessaint, L.A.; Al-Haddad, K. A comparative study of energy management schemes for a fuel-cell hybrid emergency power system of more-electric aircraft. IEEE Trans. Ind. Electron. 2013, 61, 1320–1334. [Google Scholar] [CrossRef]
- Sun, L.; Feng, K.; Chapman, C.; Zhang, N. An adaptive power-split strategy for battery–supercapacitor powertrain—Design, simulation, and experiment. IEEE Trans. Power Electron. 2017, 32, 9364–9375. [Google Scholar] [CrossRef]
- Yang, Z.; Lei, T.; Lin, Z.; Fu, H.; Zhang, X. The testing platform of hybrid electric power system for a fuel cell unmanned aerial vehicle. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–8. [Google Scholar]
- Zhang, X.; Liu, L.; Dai, Y.; Lu, T. Experimental investigation on the online fuzzy energy management of hybrid fuel cell/battery power system for UAVs. Int. J. Hydrogen Energy 2018, 43, 10094–10103. [Google Scholar] [CrossRef]
- Gang, B.G.; Kwon, S. Design of an energy management technique for high endurance unmanned aerial vehicles powered by fuel and solar cell systems. Int. J. Hydrogen Energy 2018, 43, 9787–9796. [Google Scholar] [CrossRef]
- Kim, Y.; Han, J.; Yu, S. Establishment of energy management strategy of 50 kW PEMFC hybrid system. Energy Rep. 2023, 9, 2745–2756. [Google Scholar] [CrossRef]
- Zhang, C.; Qiu, Y.; Chen, J.; Li, Y.; Liu, Z.; Liu, Y.; Zhang, J.; Hwa, C.S. A comprehensive review of electrochemical hybrid power supply systems and intelligent energy managements for unmanned aerial vehicles in public services. Energy AI 2022, 9, 100175. [Google Scholar] [CrossRef]
- Feroldi, D.; Carignano, M. Sizing for fuel cell/supercapacitor hybrid vehicles based on stochastic driving cycles. Appl. Energy 2016, 183, 645–658. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system fuzzy logic MPPT method and PI control as a charge controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Heydari, R.; Gheisarnejad, M.; Khooban, M.H.; Dragicevic, T.; Blaabjerg, F. Robust and fast voltage-source-converter (VSC) control for naval shipboard microgrids. IEEE Trans. Power Electron. 2019, 34, 8299–8303. [Google Scholar] [CrossRef]
- Yanarates, C.; Zhou, Z. Design and cascade PI controller-based robust model reference adaptive control of DC-DC boost converter. IEEE Access 2022, 10, 44909–44922. [Google Scholar] [CrossRef]
- Zhao, D.; Xia, L.; Dang, H.; Wu, Z.; Li, H. Design and control of air supply system for PEMFC UAV based on dynamic decoupling strategy. Energy Convers. Manag. 2022, 253, 115159. [Google Scholar] [CrossRef]
- Vu, H.N.; Le Tri, D.T.; Nguyen, H.L.; Kim, Y.; Yu, S. Multifunctional bypass valve for water management and surge protection in a proton-exchange membrane fuel cell supply-air system. Energy 2023, 278, 127696. [Google Scholar] [CrossRef]
- Choi, Y.; Nguyen, X.L.; Choi, S.; Yu, S. 3D computational fluid dynamics-based analysis of water transfer characteristics of hollow fiber membrane for gas-to-gas membrane humidifier. Sustain. Energy Technol. Assess. 2023, 57, 103308. [Google Scholar] [CrossRef]
- Yun, H.; Liu, S.; Zhao, Y.; Xie, J.; Liu, C.; Hou, Z.; Wang, K. Energy management for fuel cell hybrid vehicles based on a stiffness coefficient model. Int. J. Hydrogen Energy 2015, 40, 633–641. [Google Scholar] [CrossRef]
- Kim, S.G.; Lee, E.; Hong, I.P.; Yook, J.G. Review of intentional electromagnetic interference on UAV sensor modules and experimental study. Sensors 2022, 22, 2384. [Google Scholar] [CrossRef]
- Kangunde, V.; Jamisola, R.S.; Theophilus, E.K. A review on drones controlled in real-time. Int. J. Dyn. Control. 2021, 9, 1832–1846. [Google Scholar] [CrossRef]
- Lukmana, M.A.; Nurhadi, H. Preliminary study on unmanned aerial vehicle (uav) quadcopter using pid controller. In Proceedings of the 2015 International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 15–17 October 2015; pp. 34–37. [Google Scholar]
- Gao, L.; Jiang, Z.; Dougal, R.A. An actively controlled fuel cell/battery hybrid to meet pulsed power demands. J. Power Sources 2004, 130, 202–207. [Google Scholar] [CrossRef]
- Rao, V.P.S.; Rao, G.S. Design and modelling of an affordable uav based pesticide sprayer in agriculture applications. In Proceedings of the 2019 Fifth International Conference on Electrical Energy Systems (ICEES), Chennai, India, 21–22 February 2019; pp. 1–4. [Google Scholar]
- Kurnia, J.C.; Sasmito, A.P.; Shamim, T. Advances in proton exchange membrane fuel cell with dead-end anode operation: A review. Appl. Energy 2019, 252, 113416. [Google Scholar] [CrossRef]
- Mahjoubi, C.; Olivier, J.C.; Skander-Mustapha, S.; Machmoum, M.; Slama-Belkhodja, I. An improved thermal control of open cathode proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2019, 44, 11332–11345. [Google Scholar] [CrossRef]
- Zhang, B.; Lin, F.; Zhang, C.; Liao, R.; Wang, Y.X. Design and implementation of model predictive control for an open-cathode fuel cell thermal management system. Renew. Energy 2020, 154, 1014–1024. [Google Scholar] [CrossRef]
- Wang, Y.X.; Yu, D.H.; Chen, S.A.; Kim, Y.B. Robust DC/DC converter control for polymer electrolyte membrane fuel cell application. J. Power Source 2014, 261, 292–305. [Google Scholar] [CrossRef]
- Amphlett, J.C.; Baumert, R.M.; Mann, R.F.; Peppley, B.A.; Roberge, P.R.; Rodrigues, A. Parametric modelling of the performance of a 5-kW proton-exchange membrane fuel cell stack. J. Power Source 1994, 49, 349–356. [Google Scholar] [CrossRef]
- Mann, R.F.; Amphlett, J.C.; Hooper, M.A.; Jensen, H.M.; Peppley, B.A.; Roberge, P.R. Development and application of a generalized steady-state electrochemical model for a PEM fuel cell. J. Power Source 2000, 86, 173–180. [Google Scholar] [CrossRef]
- Wang, C.; Nehrir, M.H.; Shaw, S.R. Dynamic models and model validation for PEM fuel cells using electrical circuits. IEEE Trans. Energy Convers. 2005, 20, 442–451. [Google Scholar] [CrossRef]
- Fly, A.; Thring, R.H. A comparison of evaporative and liquid cooling methods for fuel cell vehicles. Int. J. Hydrogen Energy 2016, 41, 14217–14229. [Google Scholar] [CrossRef]
- Wang, T.; Jagarwal, A.; Wagner, J.R.; Fadel, G. Optimization of an automotive radiator fan array operation to reduce power consumption. IEEE/ASME Trans. Mechatron. 2014, 20, 2359–2369. [Google Scholar] [CrossRef]
- Keklikoğlu, H.Ö. Design, Construction and Performance Evaluation of Axial Flow Fans. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2019. [Google Scholar]
- Liu, D.; Wang, X.; Zhang, M.; Gong, M. SOC estimation of lithium battery based on N-2RC model in electric vehicle. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 2916–2921. [Google Scholar]
- Nandam, P.K.; Sen, P.C. A comparative study of proportional-integral (PI) and integral-proportional (IP) controllers for dc motor drives. Int. J. Control 1986, 44, 283–297. [Google Scholar] [CrossRef]
- Bhatti, S.A.; Malik, S.A.; Daraz, A. Comparison of PI and IP controller by using Ziegler-Nichols tuning method for speed control of DC motor. In Proceedings of the 2016 International Conference on Intelligent Systems Engineering (ICISE), Islamabad, Pakistan, 15–17 January 2016; pp. 330–334. [Google Scholar]
- Ahmed, A.H.; Abd El Samie, B.K.; Ali, A.M. Comparison between fuzzy logic and PI control for the speed of BLDC motor. Int. J. Power Electron. Drive Syst. 2018, 9, 1116–1123. [Google Scholar] [CrossRef]
- Khuntia, S.R.; Mohanty, K.B.; Panda, S.; Ardil, C. A Comparative Study of PI, IP, Fuzzy and Neuro-Fuzzy Controllers for Speed Control of DC Motor Drive. Int. J. Electr. Syst. Sci. Eng. 2009, 5, 714–718. [Google Scholar]
- Salem, F.; Mosaad, M.I. A comparison between MPC and optimal PID controllers: Case studies. In Proceedings of the Michael Faraday IET International Summit 2015, Kolkata, India, 12–13 September 2015; pp. 59–65. [Google Scholar]
- Shehu, I.A.; Wahab, N.A. Applications of MPC and PI controls for liquid level control in coupled-tank systems. In Proceedings of the 2016 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 22 October 2016; pp. 119–124. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Active cell area | 100 | ||
| Reference potential | 1.229 | ||
| Exchange current density | 4 × 10−11 | ||
| Limit current | 90 | ||
| Hydrogen partial pressure | 50 | ||
| Oxygen partial pressure | 50 | ||
| Molar gas constant | 8.3144 | ||
| Faraday constant | 96,485 | ||
| Transfer coefficient | 0.77 | - | |
| Water content | 11 | - | |
| Number of cells | 48 | - | |
| Number of parallel stacks | 5 |
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Air density | 1.2 | ||
| Specific heat of the air | 1000 | ||
| Ambient temperature of the air | 298.15 | ||
| Convective heat transfer coefficient | 90 | ||
| Equivalent heat transfer area of stacks | 0.15 | ||
| Latent heat of evaporation | 2500 | ||
| Empirical coefficient of evaporation | 0.1 | - | |
| Mass of a stack | 1.5 | ||
| Specific heat of stack | 3000 |
| Parameter | PWM Duty Cycle (%) | |
|---|---|---|
| 0 | 100 | |
| Rated Voltage () | 12 | |
| Rated Current () | 0.19 | 3.00 |
| Rated input power () | 2.28 | 36 |
| Rated Speed () | 1500 | 6400 |
| Max Air flow () | 1.49 | 6.35 |
| Rated Voltage () | 40,000 (@ 60 °C) | |
| Fan Speed (r/min) | Fluid Angle (deg) | Fan Speed (r/min) | Fluid Angle (deg) |
|---|---|---|---|
| 0 | 90.0 | 3852 | 47.5 |
| 1500 | 75.8 | 4832 | 51.2 |
| 2088 | 52.1 | 5420 | 52.8 |
| 2676 | 46.1 | 5616 | 53.1 |
| 3068 | 45.6 | 6400 | 52.3 |
| Parameter | Value | Units |
|---|---|---|
| Cell Capacity | 28.4 | |
| Cell voltage | 3.6 | |
| Cell weight | 0.6 | |
| Number of cells | 12 | - |
| Convection coefficient | 10 | |
| Average specific heat | 900 |
| Supply Voltage (V) | Current (A) | Flow Rate (kg/s) |
|---|---|---|
| 3.0 | 1.0 | 0.0067 |
| 6.0 | 1.7 | 0.0183 |
| 9.0 | 2.1 | 0.0233 |
| 12.0 | 2.7 | 0.0292 |
| Parameter | PI/PI | PI/PI-MRAC | IP/PI | IP/PI-MRAC |
|---|---|---|---|---|
| Proportional gain | 300/0.05 | 700/0.3 | ||
| Integral gain | 30/0.01 | 200/0.5 | ||
| Adaptation gain (γ) | 0.001 | 0.1 | ||
| Reference model | ||||
| Parameter | Value | Unit |
|---|---|---|
| Ambient Temperature | 25 | °C |
| Total weight | 36 | |
| Initial SOC of battery | 0.5 | - |
| High limit SOC | 0.55 | - |
| Low limit SOC | 0.45 | - |
| The base power of fuel cell | 3 | |
| Sampling time | 0.001 | |
| Simulation time | 2300 | |
| Load profiles | Smooth/Rough | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyun, D.; Han, J.; Hong, S. Power Management Strategy of Hybrid Fuel Cell Drones for Flight Performance Improvement Based on Various Algorithms. Energies 2023, 16, 8001. https://doi.org/10.3390/en16248001
Hyun D, Han J, Hong S. Power Management Strategy of Hybrid Fuel Cell Drones for Flight Performance Improvement Based on Various Algorithms. Energies. 2023; 16(24):8001. https://doi.org/10.3390/en16248001
Chicago/Turabian StyleHyun, Daeil, Jaeyoung Han, and Seokmoo Hong. 2023. "Power Management Strategy of Hybrid Fuel Cell Drones for Flight Performance Improvement Based on Various Algorithms" Energies 16, no. 24: 8001. https://doi.org/10.3390/en16248001
APA StyleHyun, D., Han, J., & Hong, S. (2023). Power Management Strategy of Hybrid Fuel Cell Drones for Flight Performance Improvement Based on Various Algorithms. Energies, 16(24), 8001. https://doi.org/10.3390/en16248001