1. Introduction
The modular multilevel converter, with its high-power quality, decoupled control of active and reactive power, capability of supplying power to passive systems, and modular manufacturing [
1,
2,
3], is widely adopted in many fields, including renewable energy integration, high-voltage direct current transmission (HVDC), and medium- to low-voltage DC distribution [
4,
5]. Such a trend results in a significant number of MMC system resonance instabilities extending over a wide range of frequencies [
6,
7,
8]. Simultaneously, precise modeling of MMC is a prerequisite for accurate analysis of system stability. The sequence impedance model of MMC directly characterizes the dynamic relationship between terminal voltage and current [
9]. Model validation and system stability criteria are more intuitively comprehensible [
10,
11,
12].
With the continuous development of modern power systems, the operational modes of AC/DC grids consisting of multiple converters are complex and variable. The resonant problems are evolving towards largescale, complex, and wideband characteristics [
13]. In the conventional resonance investigations at the AC terminal of MMC, the analysis is limited to the impedance characteristics of the converter, while considering the DC system as an ideal voltage source to simplify the analysis [
14,
15]. In practice, MMC interconnects AC/DC systems, and the small-signal components on the AC terminal are effectively transmitted to the DC system through the converter [
16,
17]. Then, the small-signal perturbations on the DC side are influenced by the dynamic of the DC system and transferred to the AC terminal. Neglecting the influence of the DC system may introduce inaccuracies in stability analysis results.
Due to the presence of a significant number of submodules (SM), there are complicated internal multi-harmonic coupling characteristics within the MMC arms. Reference [
16] modified the matrix representation for multi-harmonic linearization during the sequence impedance modeling process. Nevertheless, different outer loop control methods were not taken into account. Additional studies have focused on impedance modeling related to voltage feedforward [
18,
19], various control approaches [
20], positive and negative sequence separation phase current control [
21,
22], frequency coupling characteristics [
23], and control delay [
24]. Nonetheless, the sequence impedance modeling described above treats the MMC’s DC port as an ideal DC source with a constant DC bus voltage, while disregarding the dynamic of the DC system on the AC terminal impedance characteristics of MMC. Incorporating the influence of the wind farm, the DC side impedance of MMC was developed [
25]. The results suggest that incorporating AC dynamics into DC impedance modeling enhances the accuracy of DC system resonance analysis. Including the DC impedance of the onshore MMC, Ref. [
5] established the AC side impedance model of offshore MMC and analyzed the sub-/super-synchronous oscillation occurring in the connection with the offshore wind farm. However, in the modeling process, the offshore MMC employs VF control and does not incorporate PLL. Given the possible influence of the DC system on MMC’s AC side impedance characteristics, which may lead to impedance mismatch with the AC grid and subsequent system resonance, there is currently an absence of a modeling approach for MMC’s AC side sequence impedance that considers DC system dynamics.
In this paper, a method for MMC sequence impedance modeling that incorporates the dynamics of the DC system is proposed. Firstly, a constant DC voltage control MMC is used as an illustration, and the power stage model of MMC considering DC bus voltage perturbation is established based on multi-harmonic linearization. The DC current is represented by the MMC arm current at the corresponding frequency. Therefore, the impact of DC bus voltage can be introduced via the multiplication of DC current and the DC system impedance. Secondly, the complete control model of MMC is developed with the consideration of DC bus voltage dynamics, which includes DC voltage control, current control, phase-locked loop (PLL), circulating current suppression control (CCSC), and capacitor voltage balance control. Thirdly, the frequency response scan is realized by the simulation model of MMC in the time domain. The correctness of the suggested impedance modeling method is verified by comparing the analytic calculation and the impedance measurements. Accordingly, the influence of the DC system on the sequence impedance characteristics of MMC is analyzed. The paper is organized as follows: In
Section 2, the small signal model of MMC considering DC bus perturbation is developed.
Section 3 presents a comprehensive control modeling with DC voltage dynamics. Verification and analysis of the impedance with DC port characteristics are illustrated in
Section 4.
Section 5 concludes the impact of DC system dynamics on the impedance response of MMC.
2. Small Signal Model of MMC Considering DC Bus Perturbation
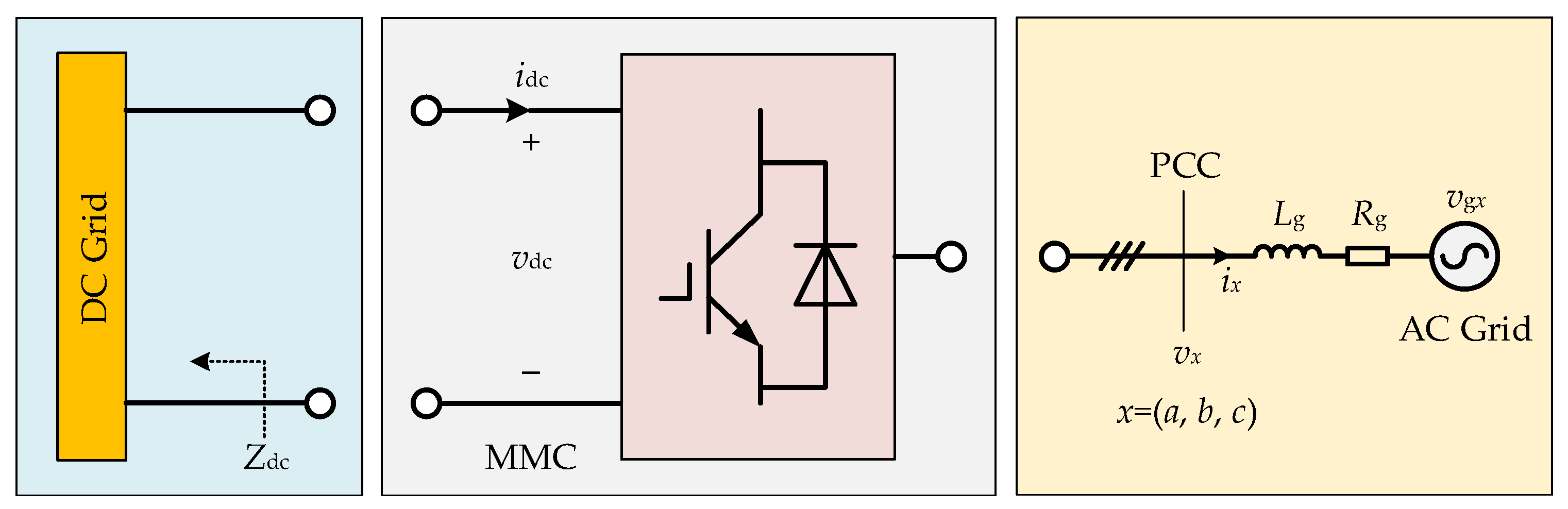
Figure 1 illustrates the main circuit structure of the three-phase MMC system studied in this paper. A conventional Thevenin equivalent circuit is employed to describe the circuit configuration of the AC network. Namely, simulating an active power grid utilizing a three-phase ideal voltage source characterized by an amplitude of
Vg and a fundamental frequency of
f1. To model the strength of the AC grid, three-phase symmetrical impedances are employed. At the point of common coupling (PCC), the AC voltage is represented as
vabc. The current flowing from the AC terminal of MMC to the AC grid is denoted as
iabc, and this is also defined as its reference direction. To characterize the DC port of the MMC, a ‘black-box’ network is connected in parallel with the DC bus. The input impedance of the DC port is expressed as
Zdc. In practice, the DC network can take the form of constant current source, constant power source, or large-scale MMC-HVDC transmission system. This paper does not impose extensive constraints on the topology of the DC network. Using a ‘black-box’ model for the DC network is more effective in demonstrating the advantages of the modeling method presented in the subsequent sections. At the DC port of the MMC, the DC voltage and current are represented as
vdc and
idc, respectively. Similarly, the reference direction follows the motor convention that is defined as the current flowing from the DC network into the MMC.
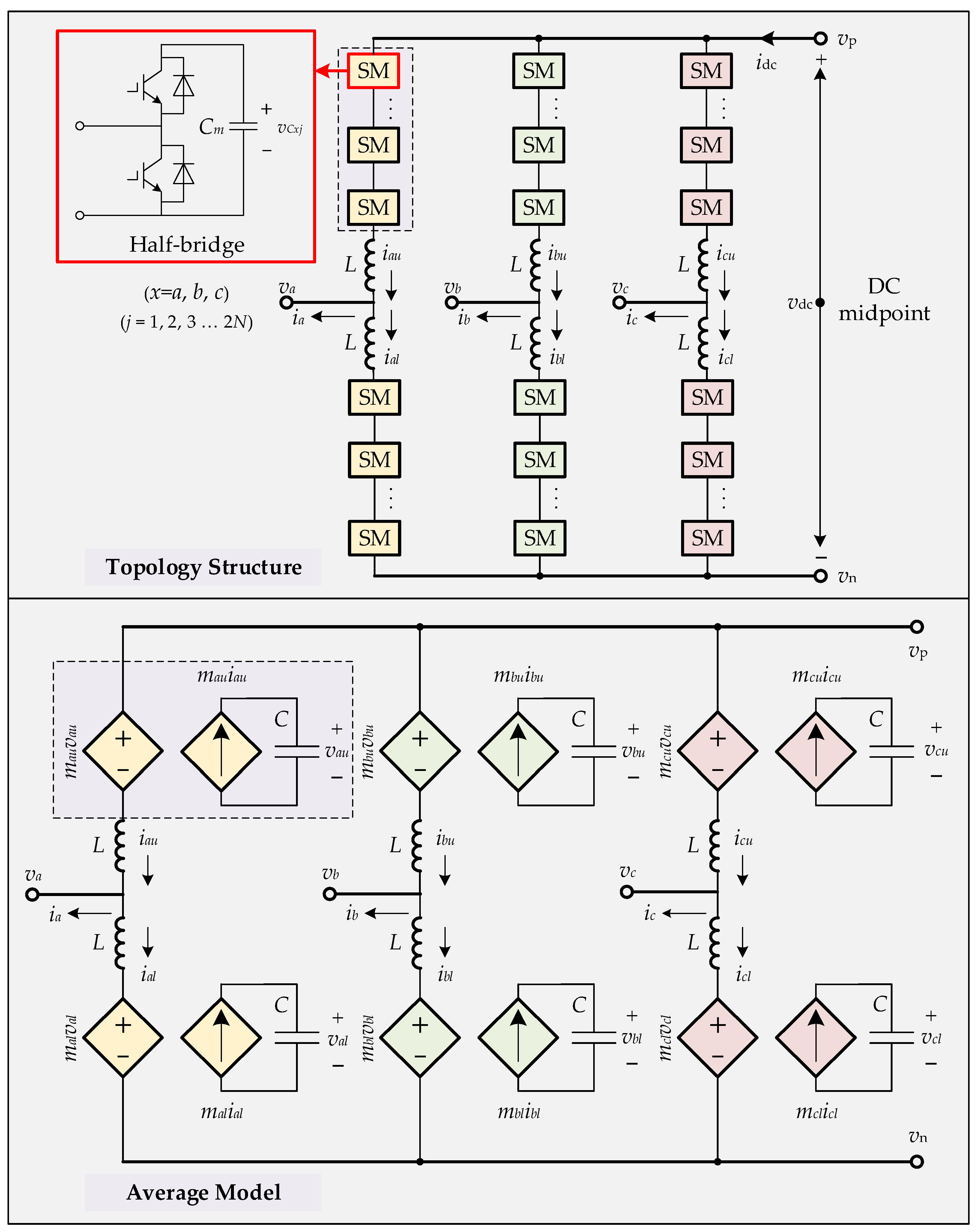
In the MMC topological structure and average model shown in
Figure 2, each variable subscript indicates the three-phase
abc and upper-lower arm (
u for upper arm,
l for lower arm). The MMC arms consist of
N submodules,
L represents the arm inductance,
rL indicates the series resistance, and
Cm denotes the submodule capacitance. The submodule capacitor voltages
vCxj are kept in balance. It is worth emphasizing that this does not indicate the absence of voltage harmonics or unchanging capacitor voltage. For the upper arm of phase
a, the average model of MMC can be represented as follows.
The modulation index mau is defined as the ratio of the number of inserted submodules to the total number of submodules in the upper arm of phase a, vau is the sum of the submodule capacitor voltages in the arm, and iau is the arm current. C = Cm/N indicates the equivalent capacitance of N submodule capacitors in series. vm represents the voltage from the DC midpoint to the AC neutral, such that vp = vdc/2 + vm, and vn = −vdc/2 + vm. The derivation of Equations (1)–(3) can be repeated in three phases to obtain the complete power stage model of MMC.
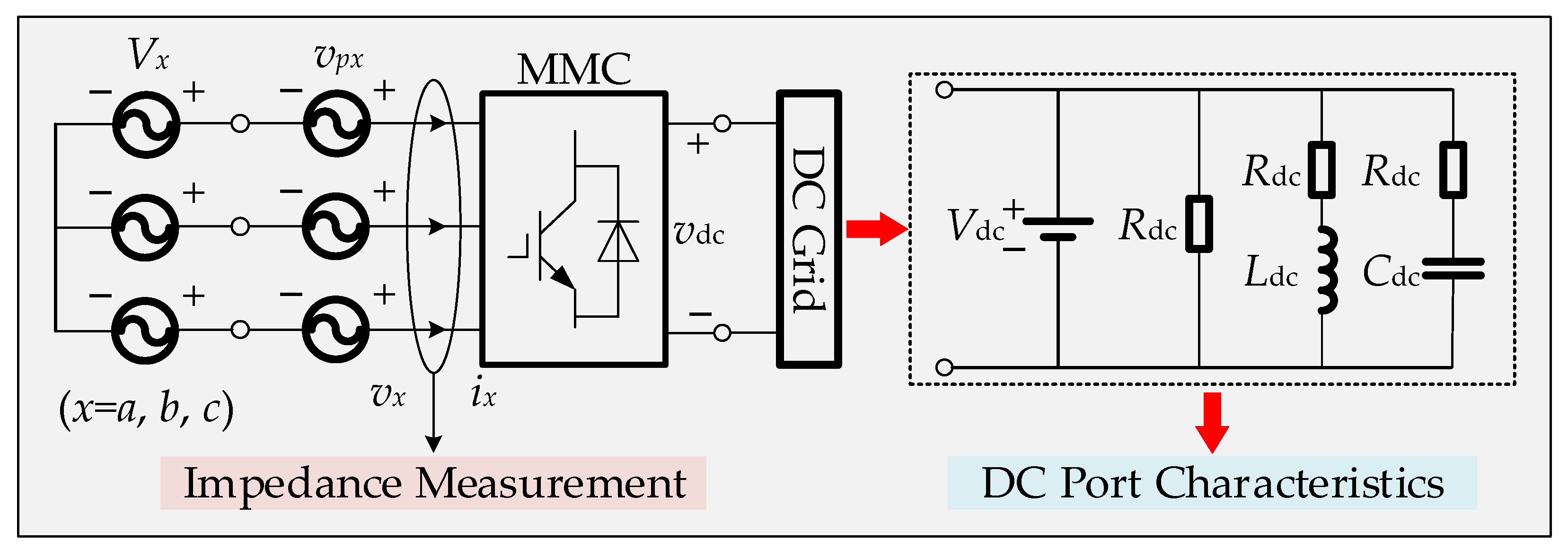
Based on multi-harmonic linearization, the sequence impedance modeling applies sinusoidal voltage perturbation
at the AC terminal of MMC and derives the AC current response
at the perturbation frequency
fp. According to the reference direction described above, the impedance of MMC can be obtained as
/
. The instantaneous AC voltage and current of phase
a are presented in Equation (4).
The phase and sequence relationships of small-signal harmonics in each variable caused by the AC voltage perturbation are illustrated in
Table 1. As defined by the symmetrical component analysis, PS, NS, and ZS correspond to the positive, negative, and zero sequence components of the three-phase system. For common and differential mode (CM and DM) representations, the electrical quantities in the upper and lower arms exhibit a phase difference of 180° and −180°, respectively. In view of model accuracy and computational complexity, the consideration of harmonics up to the third order is satisfactory for impedance-based stability analysis purpose. Under the assumption of three-phase balance, phase
b/
c voltages and currents can be determined from phase
a based on the sequence of perturbation voltage and symmetry relationships, which will not be elaborated as follows.
As indicated in
Table 1, when subjected to PS/NS perturbation voltages at the frequency
fp on the AC side, all variables may produce small-signal harmonics at frequencies
fp ±
kf1, where
k = 1, …,
n. Within the range of the third harmonic consideration in the linearization of the power stage model, only the ZS/CM components at frequencies
fp −
f1 and
fp +
f1 contribute to the DC side of MMC. Consequently, small-signal harmonics from the AC side are transmitted through the MMC to the DC side in practical operation. In the existing research, the establishment of an AC impedance model for the converter often neglects the impact of dynamic DC voltage and ignores the consideration of impedance characteristics on the DC system, which may lead to inaccuracies in stability analysis results.
In order to capture the interactions between AC/DC systems and the harmonic transfer characteristics through MMC, this section introduces the AC side sequence impedance model of MMC that accounts for the dynamics of DC voltage. Taking the upper arm of phase
a as an example, the frequency-domain small-signal response vectors for
,
,
, and
are defined as shown in Equation (5), with the subscript ‘
a’ omitted.
The nonlinearity in Equations (1) and (2) arises from the time-domain multiplication of
and
. By linearizing this nonlinearity as the sum of convolutions between one variable perturbation and the periodic steady-state response of another variable, we obtain the frequency-domain representation of the linearized power stage model.
In the context of small-signal harmonic frequencies,
Zl and
Yc are the symmetric matrices expressing the impedance of arm inductance
L and the admittance of equivalent capacitance
C.
Utilizing the phase and sequence relationships mentioned earlier, the small-signal dynamics of the MMC can be expressed using a single-arm model. To develop an independent small-signal model, it is imperative to remove the other arm variables involved in Equation (6) concerning
, such that the steady state
vm can be expressed as Equation (10) in the frequency domain.
As can be inferred from the above equation, the actual function of
is to remove the ZS/CM small-signal harmonic components from the arm voltage
, thereby ensuring that the small-signal arm current
no longer contains ZS/CM harmonic components. Defining the steady-state harmonic vectors
vu,
mu, and
iu as Toeplitz matrices
V,
M, and
I, Equations (6) and (7) can be reformulated as follows.
where
Yl represents the inverse matrix of
Zl, with its elements resulting in zeros when multiplied by the ZS/CM components. Including DC voltage perturbation, Equations (11) and (12) provide the small-signal model of MMC in the frequency domain, with the exclusion of the upper arm variable subscript ‘
u’. In order to obtain the impedance of MMC, which is equivalent to the transfer function relationship between
and
, it is essential to remove the intermediate variables
,
, and
. The research approach in this paper is as follows: in
Section 3, we will focus on modeling the MMC control system to derive the relationship between
and
,
,
,
; in
Section 4, assuming a known DC system impedance
Zdc, the small signal harmonics of DC voltage
=
, where
can be represented using the ZS/CM component of the arm current
. Further eliminating
, the analytic expression of the sequence impedance model of MMC can be obtained. For a detailed derivation, please refer to
Section 4.
3. Control Modeling with DC Voltage Dynamics
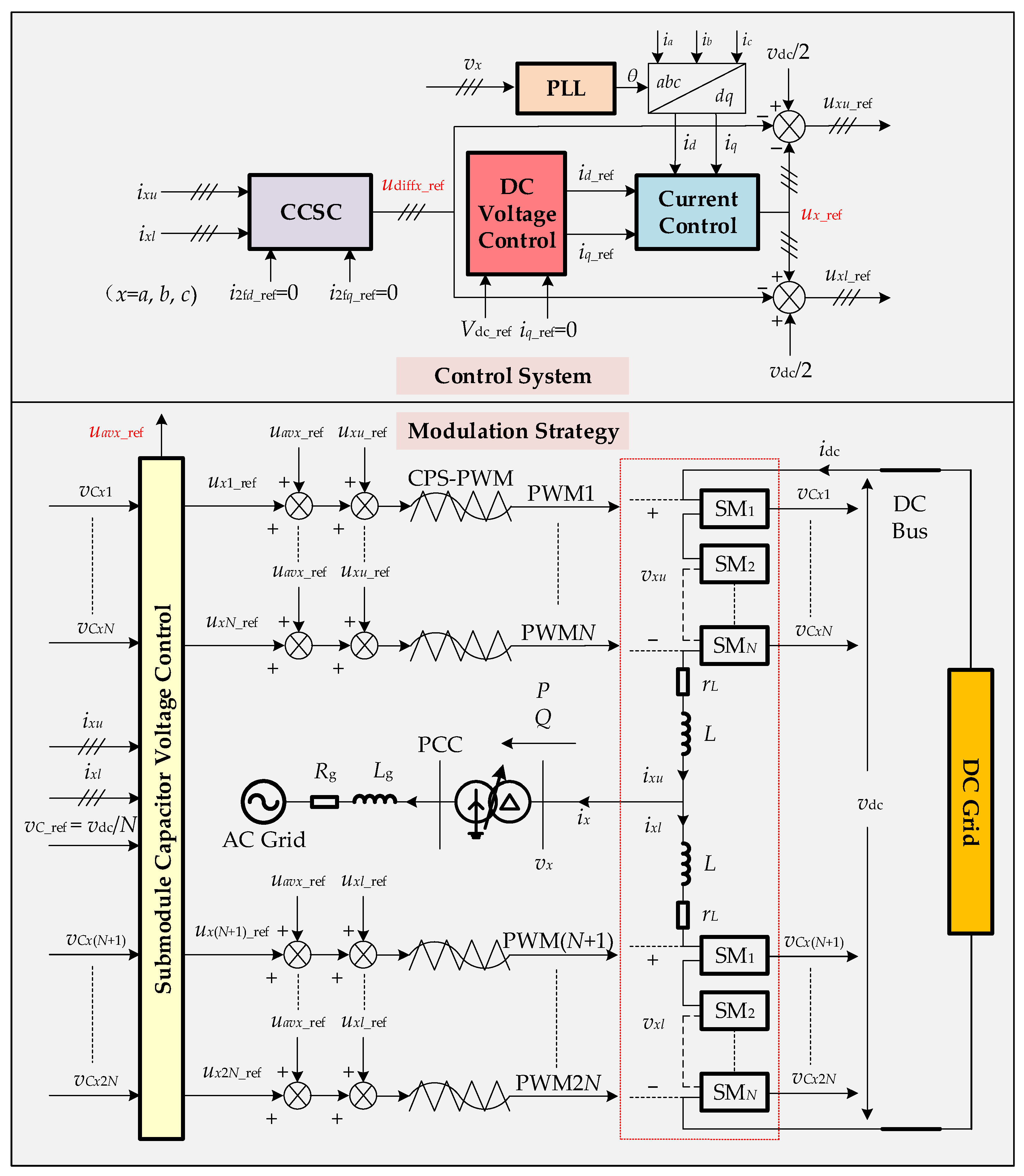
The overall control system of the MMC is illustrated in
Figure 3. In practical MMC projects, the most commonly used control strategy is based on the synchronous rotating
dq coordinate system. In the following sections, the control strategy for MMC with a constant DC bus voltage is used as an example to illustrate the control modeling with the DC voltage dynamics. It involves the constant DC voltage outer loop control, phase current inner loop control, PLL, CCSC, and submodule capacitor voltage control. The detailed control system diagram is depicted in
Figure 4. The purpose of control modeling is to establish the relationships between small-signal harmonics in modulation index
and variables in the power stage model. The coefficient matrices
Q,
E,
D, and
P, respectively, denote the influence of
,
,
, and
on the small-signal harmonics of
. As depicted in
Figure 4, PI controllers are used for all control loops, and the elements of the coefficient matrices are determined by the control structure and parameters.
In this section, the main focus is on the small-signal modeling for different control loops in the MMC, involving small-signal harmonic components influenced by the complete control system, the linearization of PLL and coordinate transformations, the derivation of specific elements in the coefficient matrices.
The multi-harmonic linearization accounts for the third-order and lower small-signal harmonics. Therefore, all coefficient matrices are of the seventh order. In this context,
Q comprises
Qi,
Qci, and
Qai, signifying the influence of the phase current control, CCSC, and the circulating current inner loop of the submodule capacitor voltage control.
Ddc represents the influence of the constant DC voltage control.
Eav and
Dav indicate the average voltage outer loop of the submodule capacitor voltage control.
Pi and
Pm are used to represent the effects of the fundamental current component through
dq transformation and the DC component of the modulation reference voltage (
dq-frame) through
dq inverse transformation. In conclusion, all the coefficient matrices are further represented in Equation (14).
As shown in
Figure 3, considering the upper arm of phase
a as an example, the small-signal harmonics of the modulation index
can be formulated as Equation (15).
3.1. Phase Current Control
Here, we establish the phase current control model
Qi without taking into account phase angle disturbances from the PLL output. The small-signal harmonics of
, after passing through
dq transformation, phase current control, and
dq inverse transformation, generate harmonics at the same frequencies in
. In this process, the PS component goes through
dq transformation, causing a reduction in its frequency by
f1, while the NS component is reduced by
f1 after
dq transformation. Considering the example of introducing PS voltage perturbation on the AC side of MMC, by the phase and sequence relationships of small-signal harmonics detailed in
Table 1, we can determine the expressions for the elements in
Qi, noted as
in Equation (16). Due to the control input being the AC side three-phase currents of MMC, the phase current control exclusively addresses the NS/PS-DM components in
at frequencies
fp − 2
f1 and
fp. The detailed element expressions are provided in Equation (17), in which
Hi(
s) denotes the transfer function of the phase current controller, with
Kid =
jω1L representing the phase current control decoupling coefficient.
Similarly, when subjected to NS voltage perturbation, the phase current control coefficient matrix
is as illustrated in Equations (18) and (19).
3.2. Circulating Current Suppression Control
With the sum of upper and lower arm currents as the input, after
dq transformation at −2
f1, PI controller
Hci(s), and
dq inverse transformation at −2
f1, only PS/NS-CM components in
that are affected by CCSC. As with the modeling of phase current control, when exposed to PS/NS voltage perturbations, the coefficient matrices
/
for CCSC can be defined as Equations (20)–(23) with
Kcd =
j2
ω1L as decoupling coefficient.
3.3. DC Voltage Control
In response to AC side voltage perturbations of frequency
fp in both PS/NS, small-signal harmonics of the voltage at
fp −
f1 and
fp +
f1 are induced on the DC side. These harmonics, after being processed by the DC voltage controller
Hdc(s), phase current controller
Hci(s), and
dq inverse transformation, result in small-signal harmonic responses at
fp − 2
f1/
fp and
fp/
fp + 2
f1 within
. The coefficient matrices
/
of DC voltage control are detailed as Equations (24)–(27). It should be observed that
Ddc contains two non-zero elements only in the column corresponding to frequencies of perturbations in DC voltage, with all other elements being zeros. The AC side voltage perturbations are transmitted through the MMC to the DC side, influencing the modulation reference wave through constant DC voltage control. Neglecting the dynamic of the DC bus voltage in the development of the AC side sequence impedance could potentially impact the results of stability analysis.
3.4. Phase Locked Loop Control
Under the influence of AC side voltage perturbations, there are small signal harmonics in the output phase angle of PLL, which can be denoted by
in the frequency domain. Impedance modeling must consider the small-signal harmonic response in
caused by
during
dq transformation and
dq inverse transformation. Previous studies have extensively explored the derivation of PLL small-signal model and linearization approach for coordinate transformation. In this context, we directly provide the transfer function matrix
GPLL, as shown in Equation (28), establishing the relationship between
and
.
Under PS/NS voltage perturbations, Equations (29)–(32) provide the comprehensive expressions for coefficient matrices
/
, respectively. Where
HPLL(
s) signifies the transfer function of the PI controller in PLL.
TPLL(
s) represents the open-loop transfer function of the system as depicted in
Figure 4c. Therefore,
GPLL(
s) represents the closed-loop transfer function of the small-signal model of PLL.
exhibits small-signal harmonics at
fp −
f1/
fp +
f1 when subjected to PS/NS AC side voltage perturbations at
fp, respectively. Hence,
GPLL has a single non-zero element exclusively at the corresponding frequency position (
fp −
f1,
fp) or (
fp +
f1,
fp), while all other elements are zero.
In the process of coordinate transformation,
induces additional small-signal harmonics in
. The actual
dq transformation and
dq inverse transformation matrices influenced by the phase angle disturbance are as follows.
Figure 4a illustrates the process of performing
dq transformation on the three-phase currents and subsequently applying
dq inverse transformation to the
dq-frame output of phase current control. The actual phase currents comprise a steady-state fundamental frequency component
along with an array of small-signal harmonics. While the
dq-frame output modulation reference voltages include a steady-state DC component, corresponding to
at fundamental frequency, and a series of small-signal harmonics. The steady-state components individually multiply the second term on the right-hand side of Equations (33) and (34) to generate small-signal harmonics in
. In conclusion, when exposed to PS/NS voltage perturbations on the AC side, the coefficient matrices
/
are affected by the PLL. Equations (35) and (36) provide the detailed expressions of non-zero elements, with all the other elements being zero. The impact of steady-state operation on the impedance of MMC is introduced by PLL.
In
Figure 4b, under ideal control conditions, the circulating currents of MMC are close to zero. Simultaneously, the DC component of the output of CCSC on the negative sequence second-harmonic
dq-frame is very small. The small signal harmonics generated by the PLL in CCSC can be neglected.
3.5. Submodule Capacitor Voltage Control with DC Voltage Dynamics
In
Figure 2,
vCxj represents the capacitor voltage of each submodule. Submodule capacitor voltage control can be divided into two parts, averaging control and balancing control [
26], as depicted in
Figure 4d. In the outer loop of averaging control, the reference is the DC bus voltage divided by the number of submodules in a single arm, and the average of the sum of capacitor voltages
inside a phase leg is used as a feedback variable. The output
icirx_ref is the reference of circulating currents in the phase domain. Finally,
uavx_ref is superimposed together with the output of CCSC and double closed-loop control to contribute the small-signal harmonics in
. The modeling of MMC sequence impedance is based on the assumption of balanced submodule capacitor voltages. However, the balancing control is used to adjust the insertion or bypass time for individual submodule and it can be neglected in the modeling process.
Dav,
Eav, and
Qai corresponding the small-signal harmonics transfer mechanism from
,
, and
to
, through the submodule capacitor voltage control.
The detailed expressions of these matrix elements are provided in Equations (37)–(42). Taking the upper arm of phase
a as an example, there are only CM components of
vau/
N in
, and CM components of
iau in
icira. In
Figure 4d, all controllers directly operate in the phase domain, the CM components of
vau and
iau are controlled by PI compensators
Hav(
s) and
Hai(
s), respectively. Under PS/NS perturbation voltages, the elements of the coefficient matrices
Eav and
Qai have the same analytic expression.
Dav indicates the control effect of DC voltage and contains non-zero elements only in (
fp −
f1,
fp −
f1) or (
fp +
f1,
fp +
f1).
This section has completed the modeling of the control system from variables , , , and in the power stage model to the modulation index , substituting into Equations (11) and (12) to eliminate the intermediate variables and . The DC current is represented by the ZS/CM component of the arm current, multiplied by the impedance of the DC system, and the intermediate variable is eliminated. Finally, the transfer function matrix between and can be derived.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}