
Optimal Scheduling Strategy of Microgrid Based on Reactive Power Compensation of Electric Vehicles

Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
1.3. Organization of the Paper
2. Problem Formulation
2.1. GT Capacity Model
2.2. PV Capacity Model
2.3. WT Capacity Model
2.4. EV Capacity Model
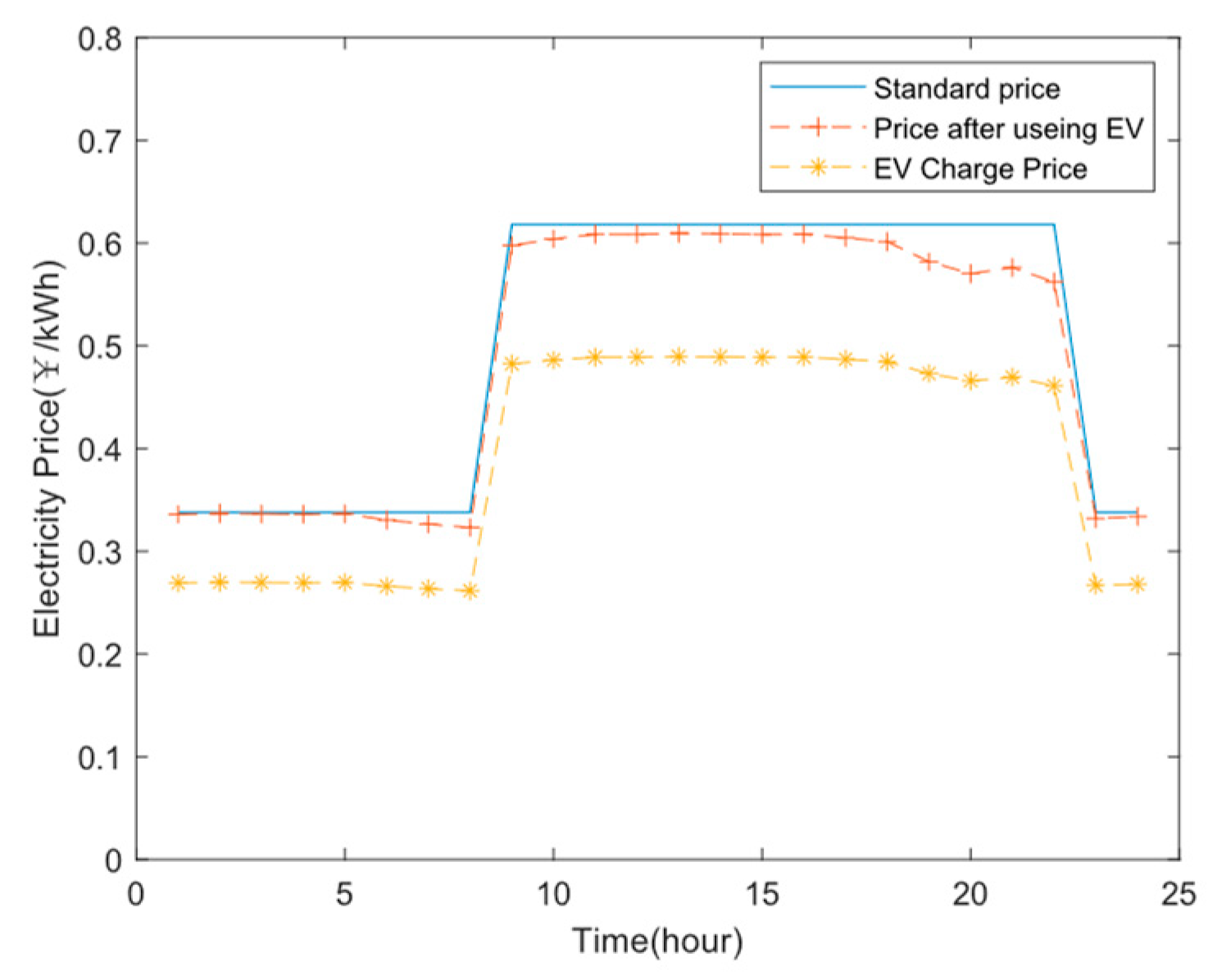
2.5. Electricity Price Model
2.6. Optimal Power Flow (OPF)
2.6.1. Objective Function
2.6.2. Constraints
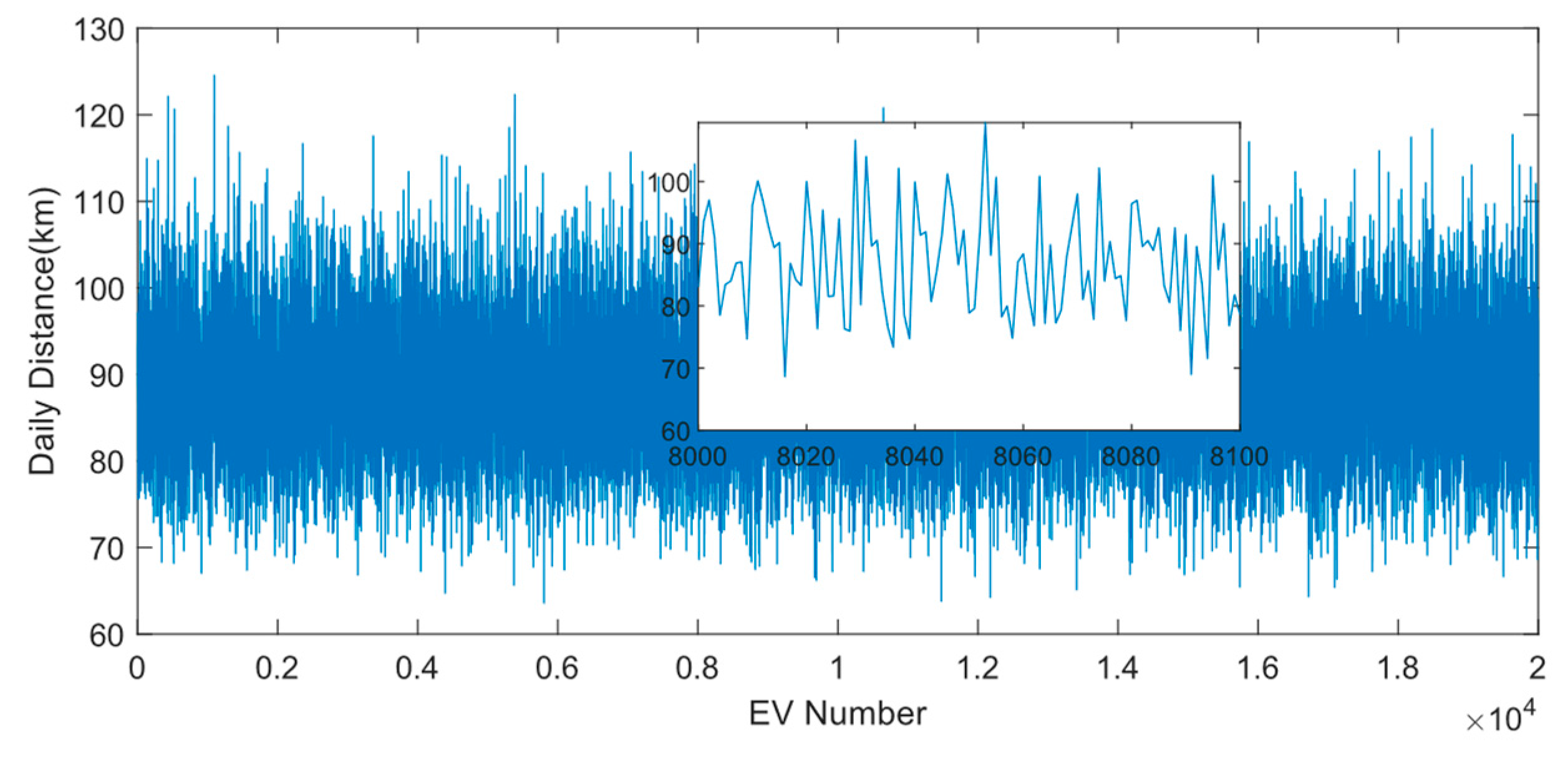
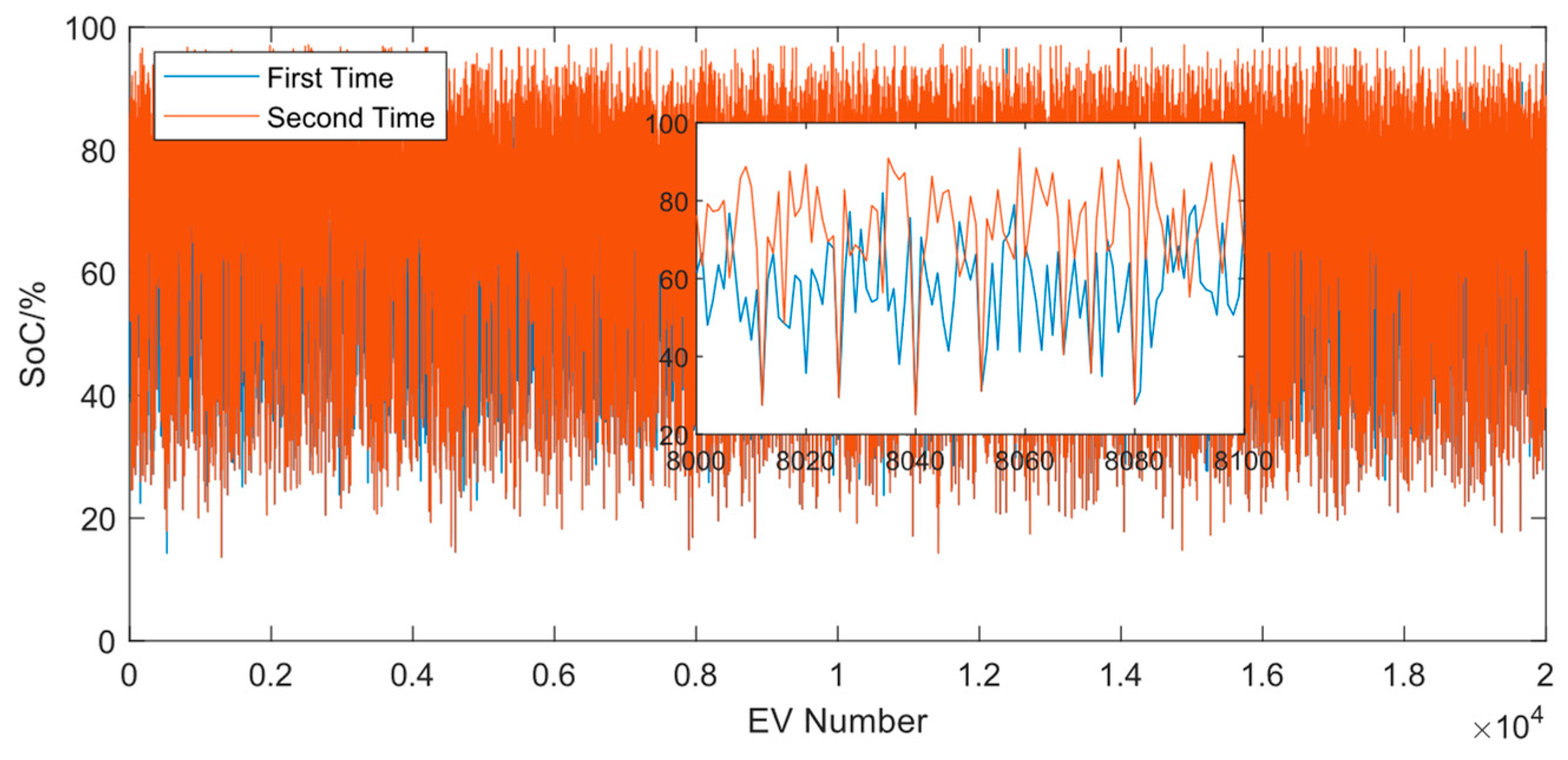
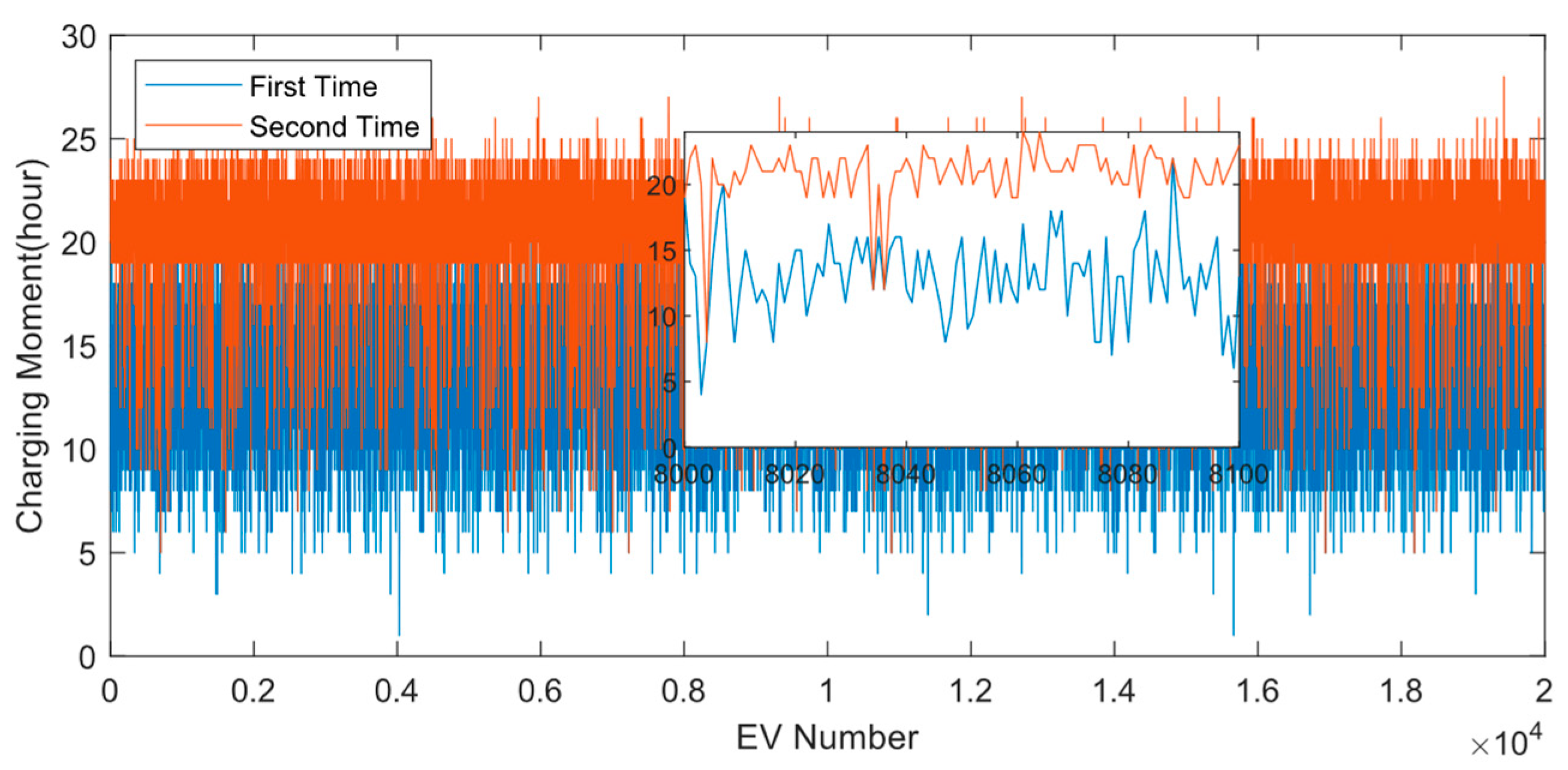
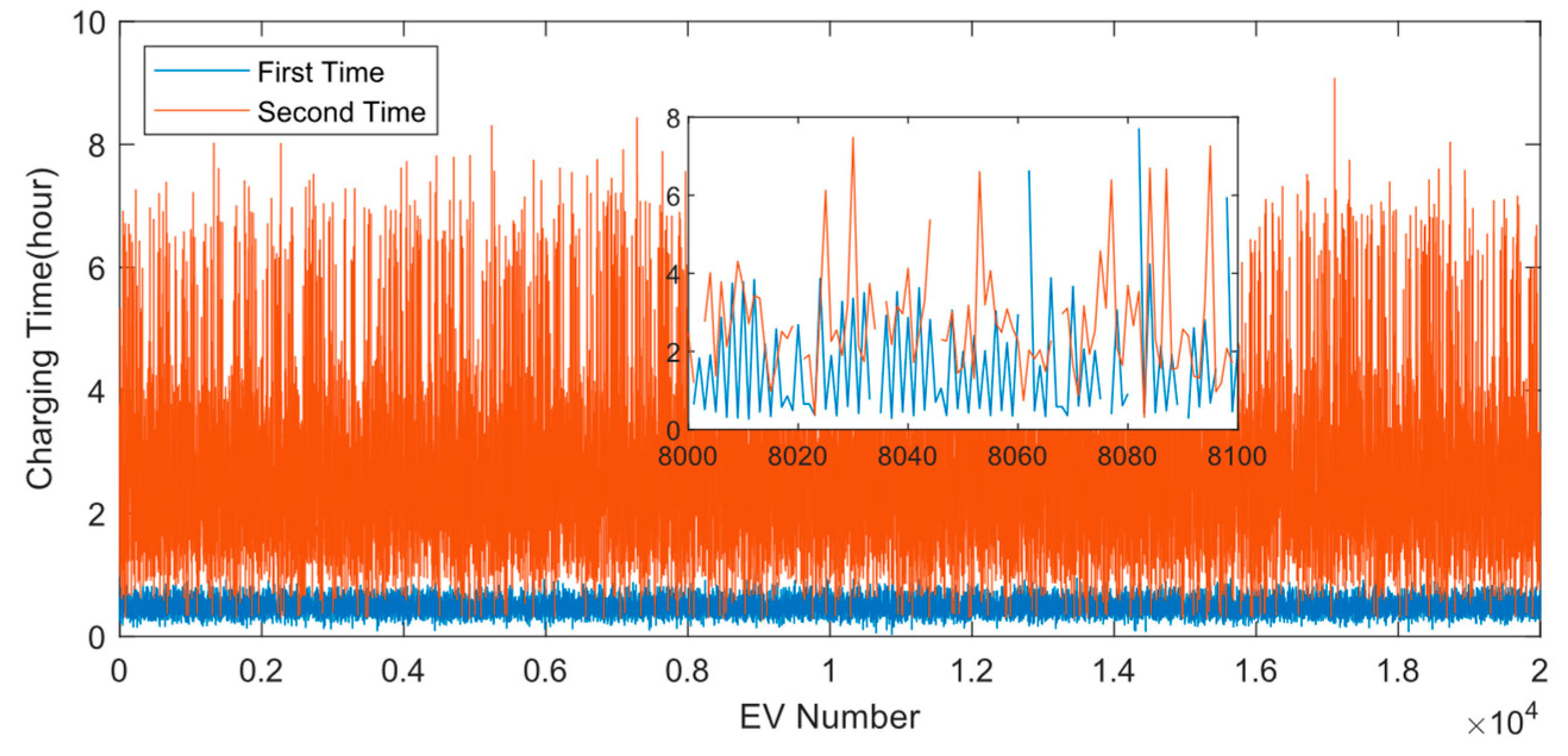
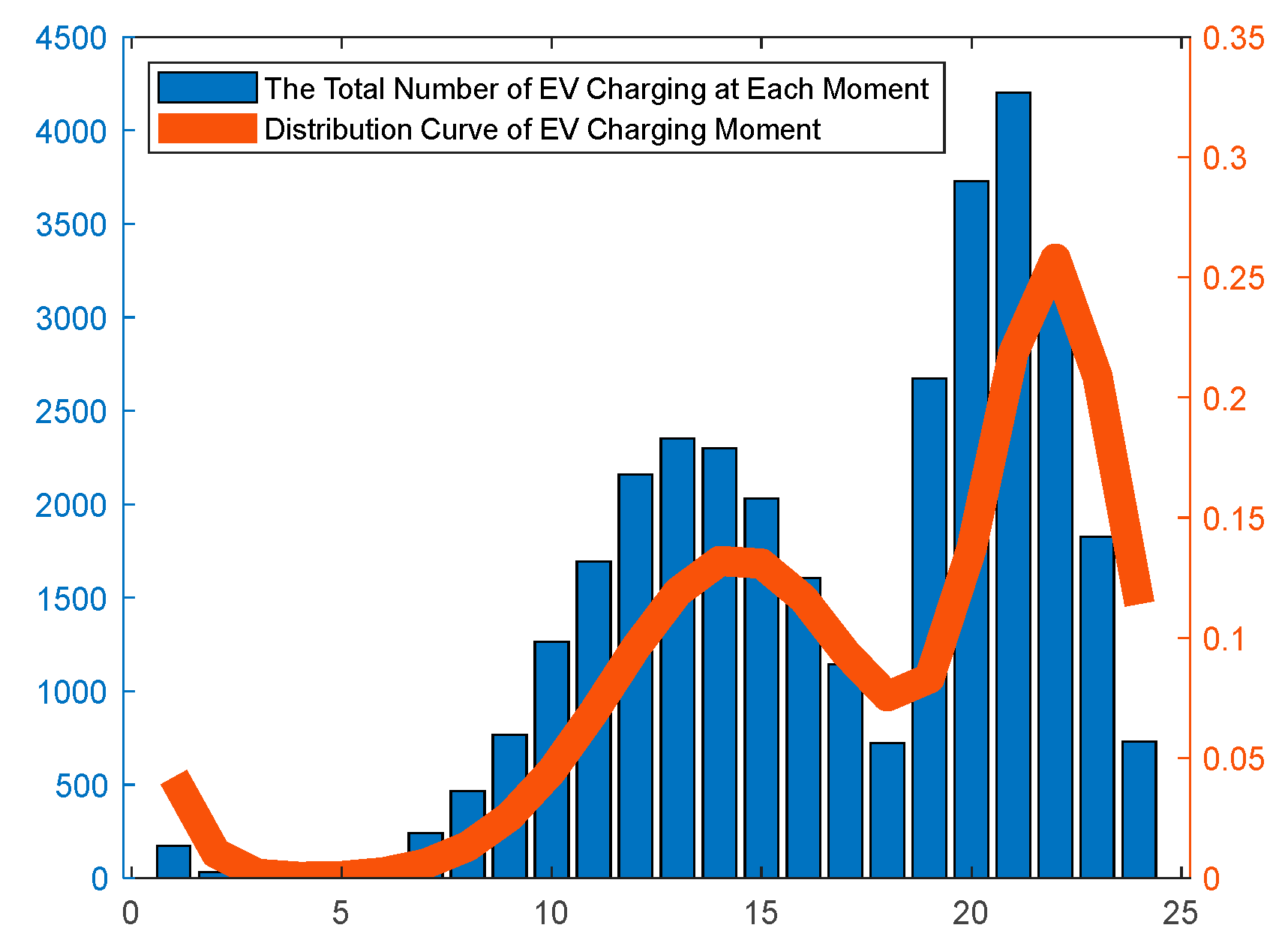
3. Monte Carlo Simulation of EV
4. Numerical Simulations
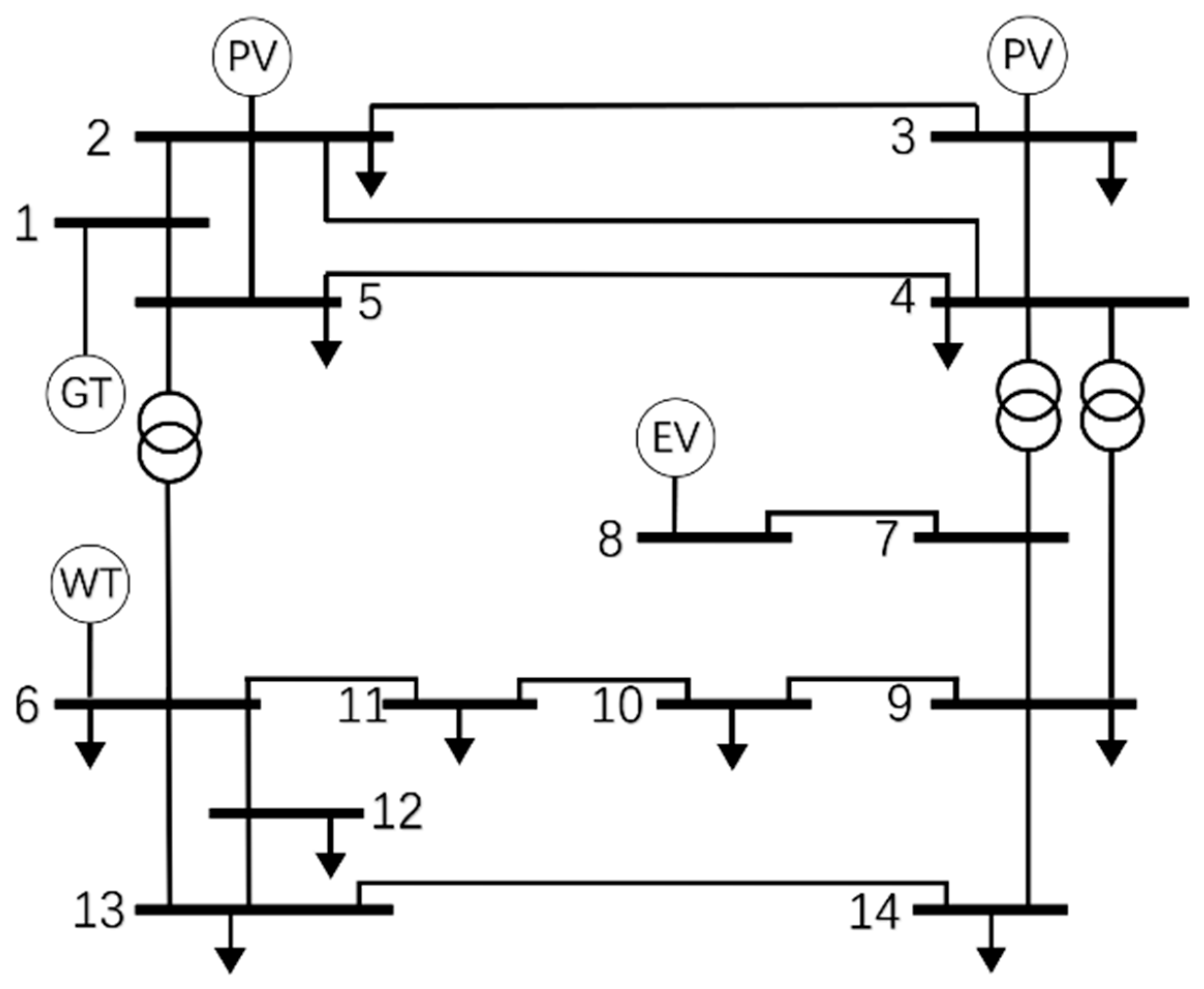
4.1. Data of Network
4.2. Analysis of Simulations
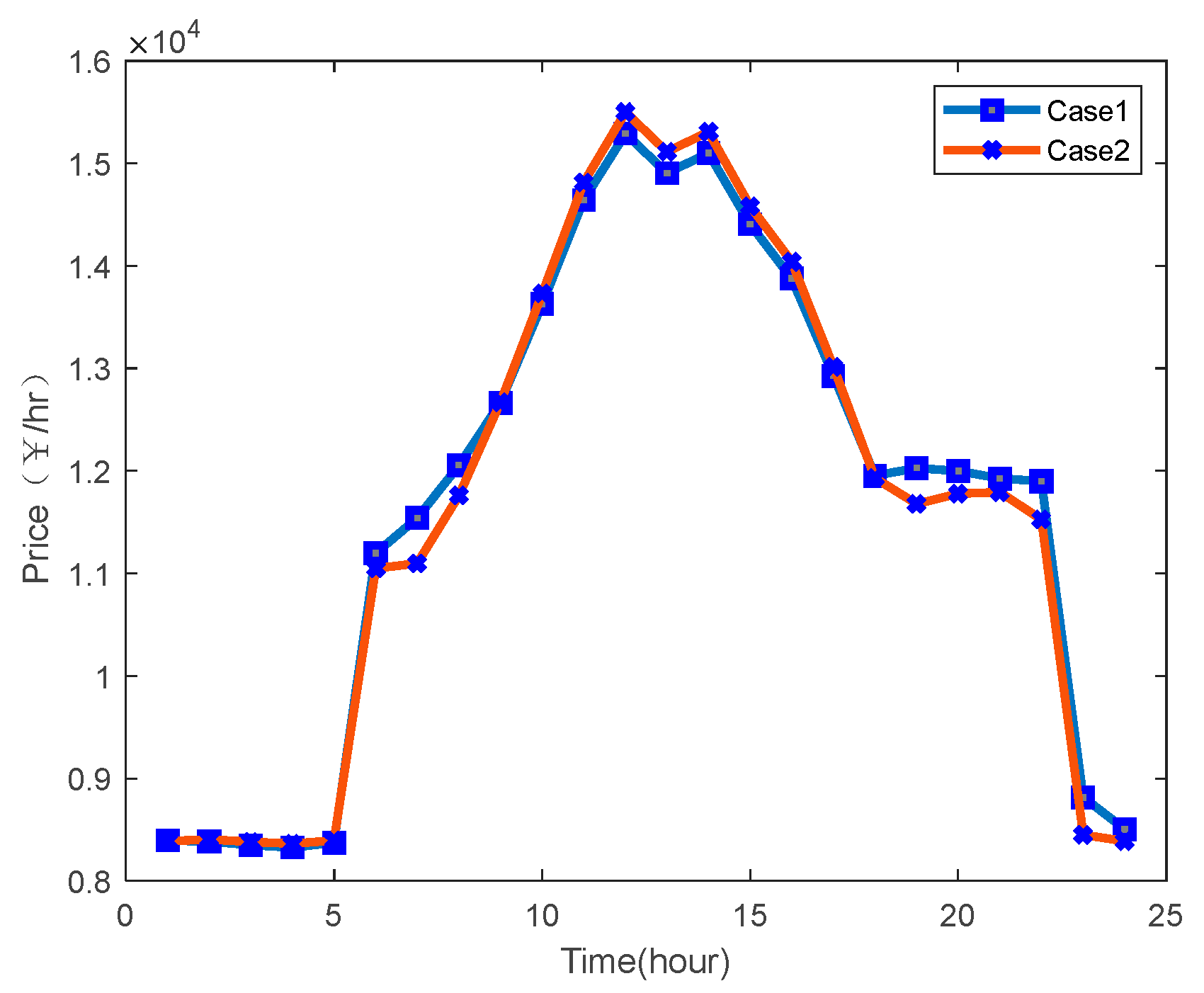
4.2.1. Economic Analysis
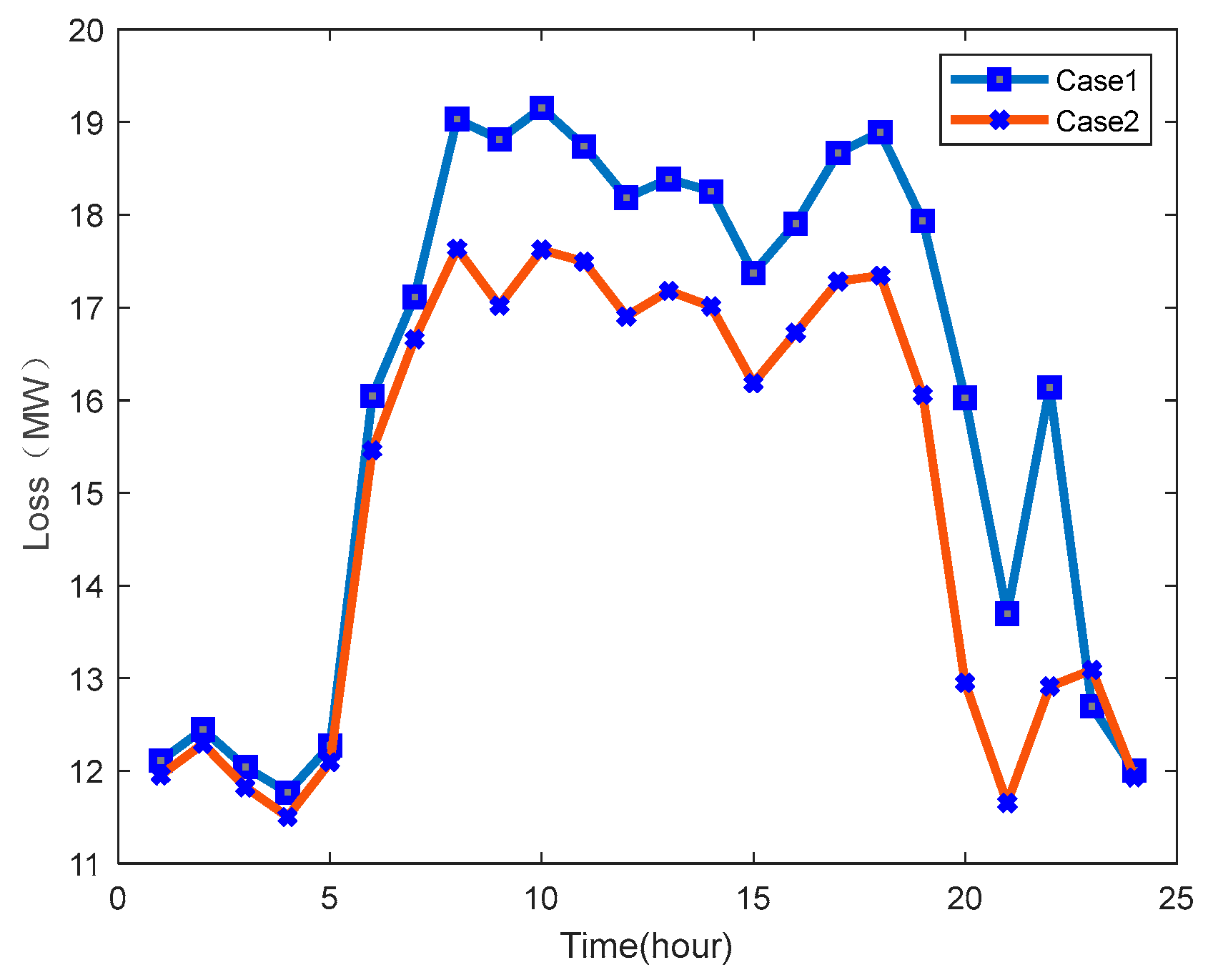
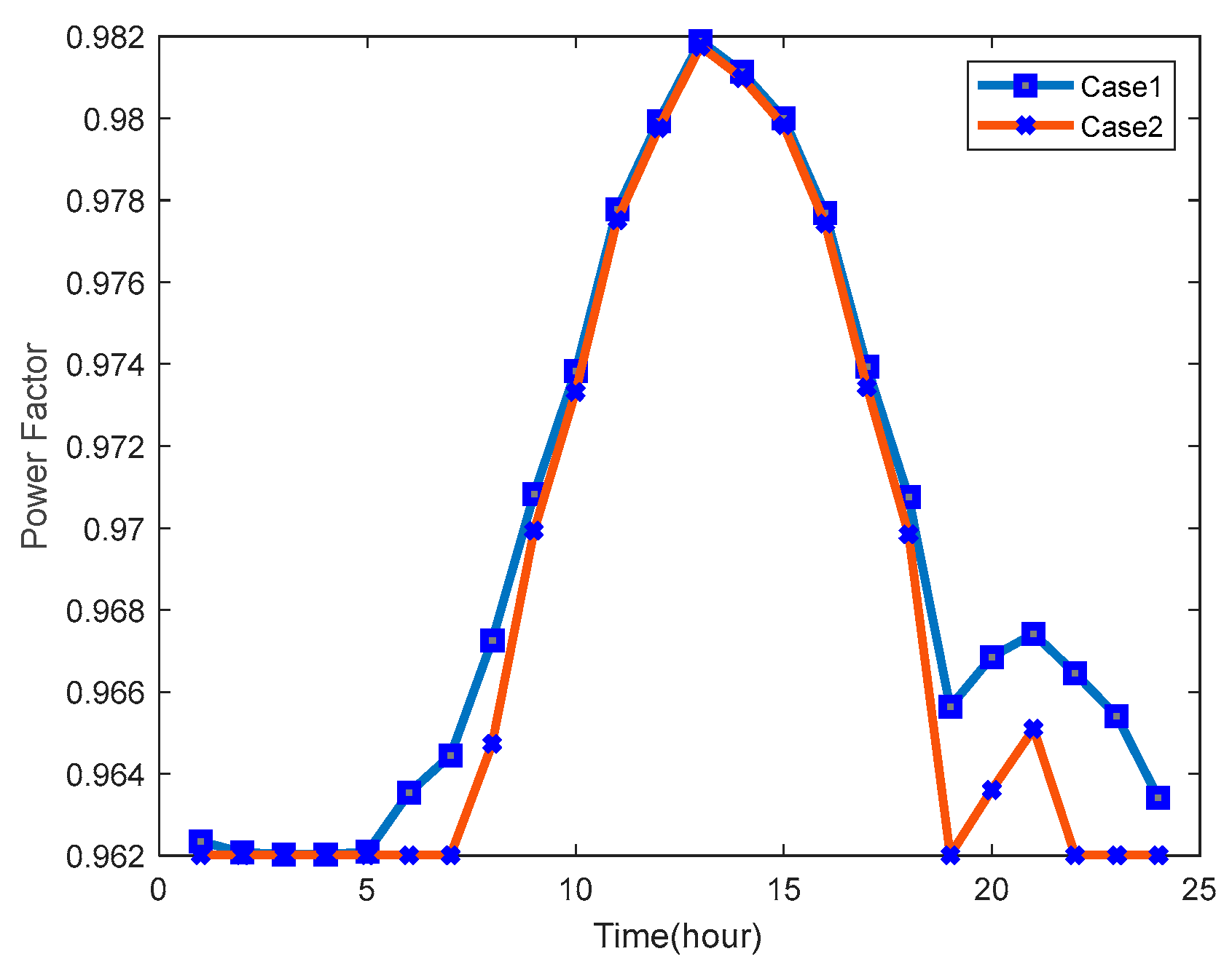
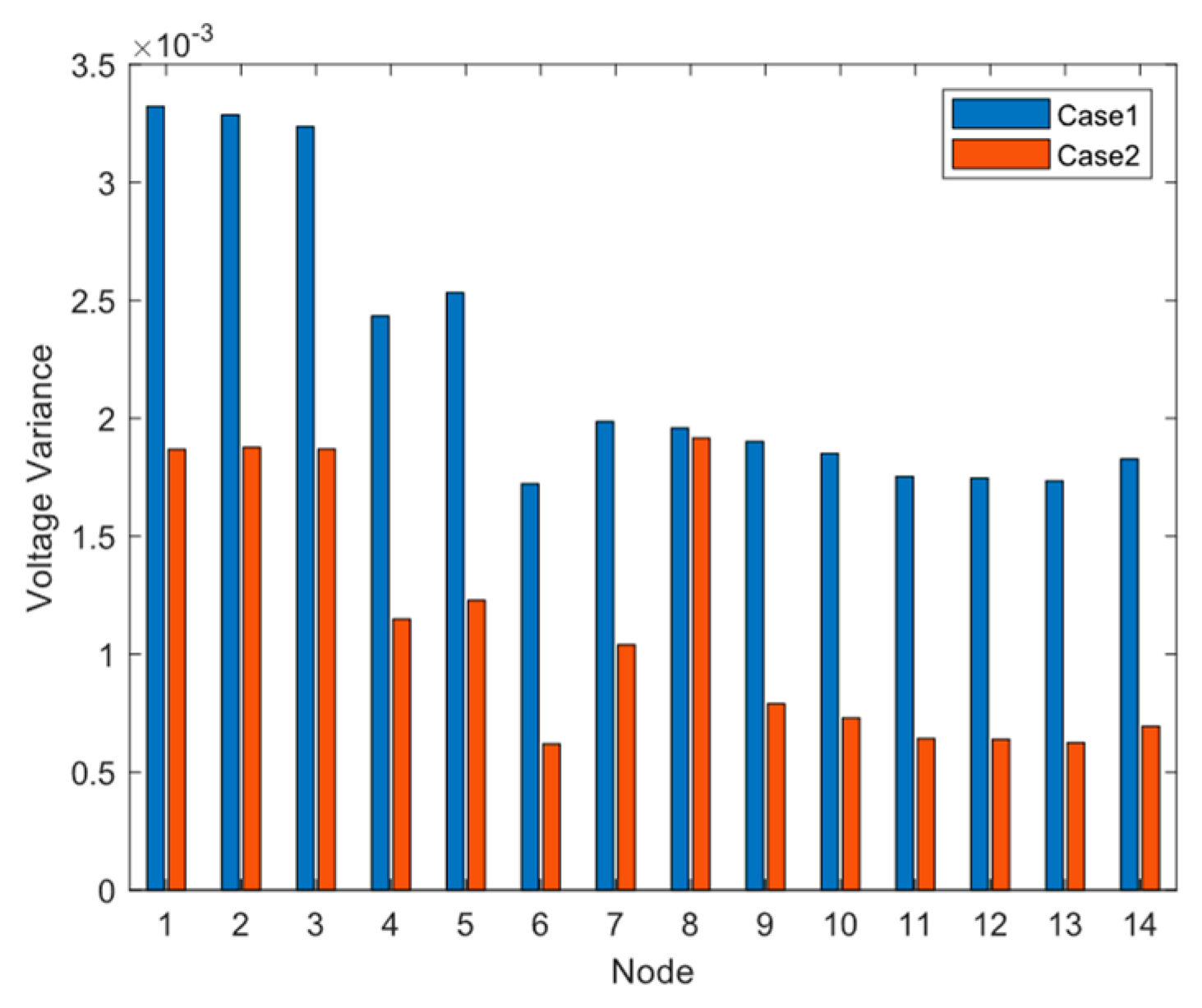
4.2.2. Safety and Reliability Analysis
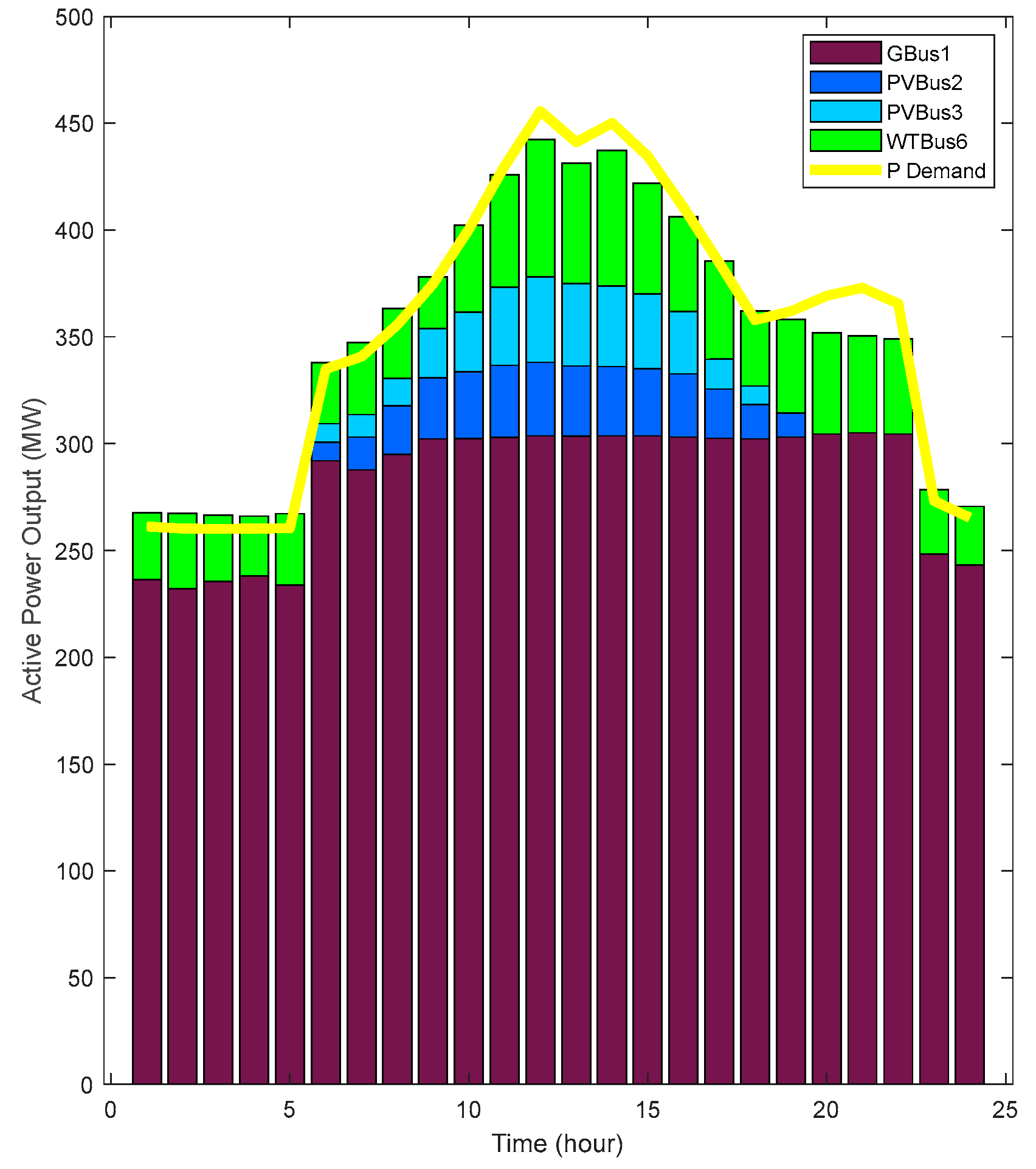
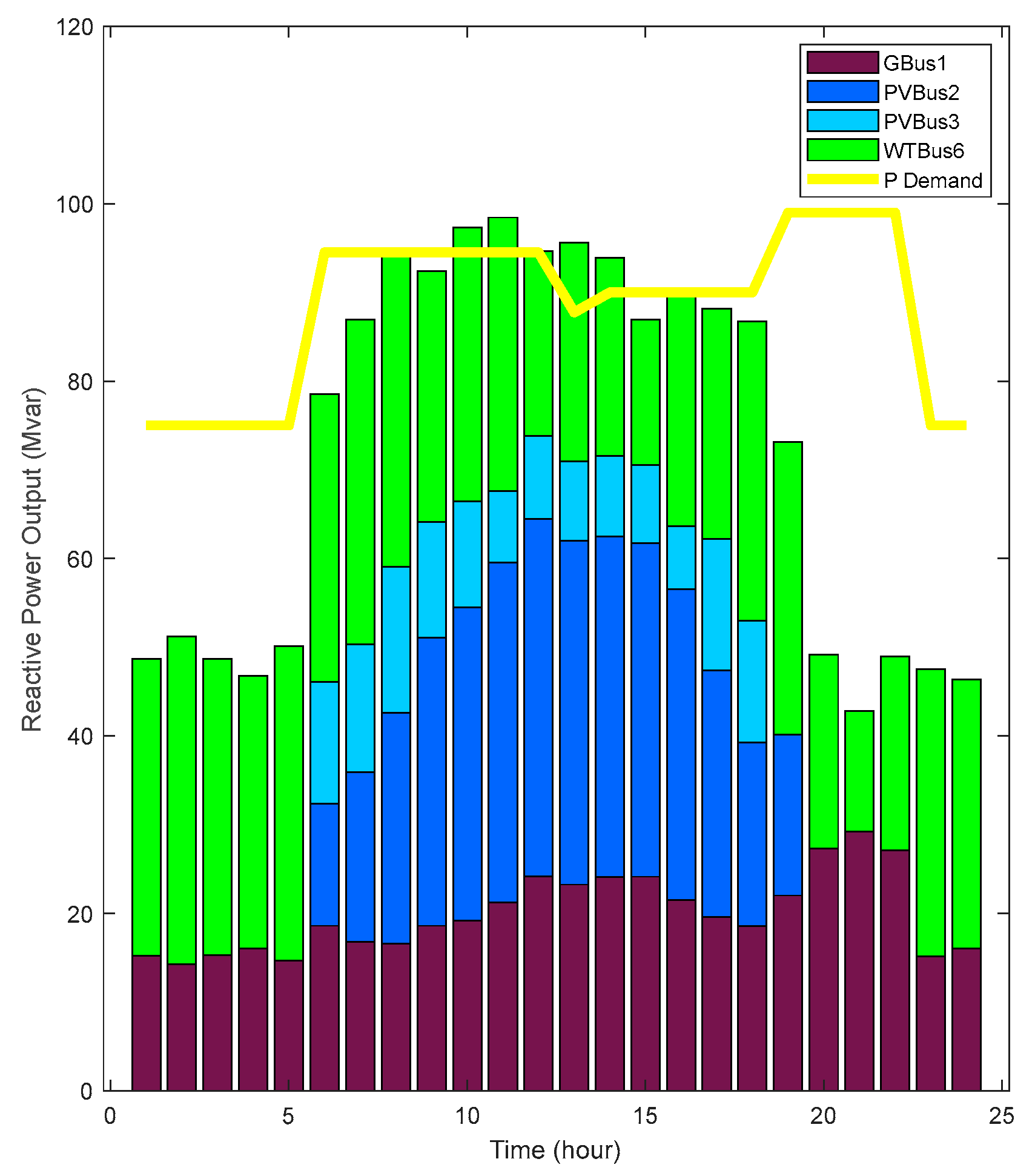
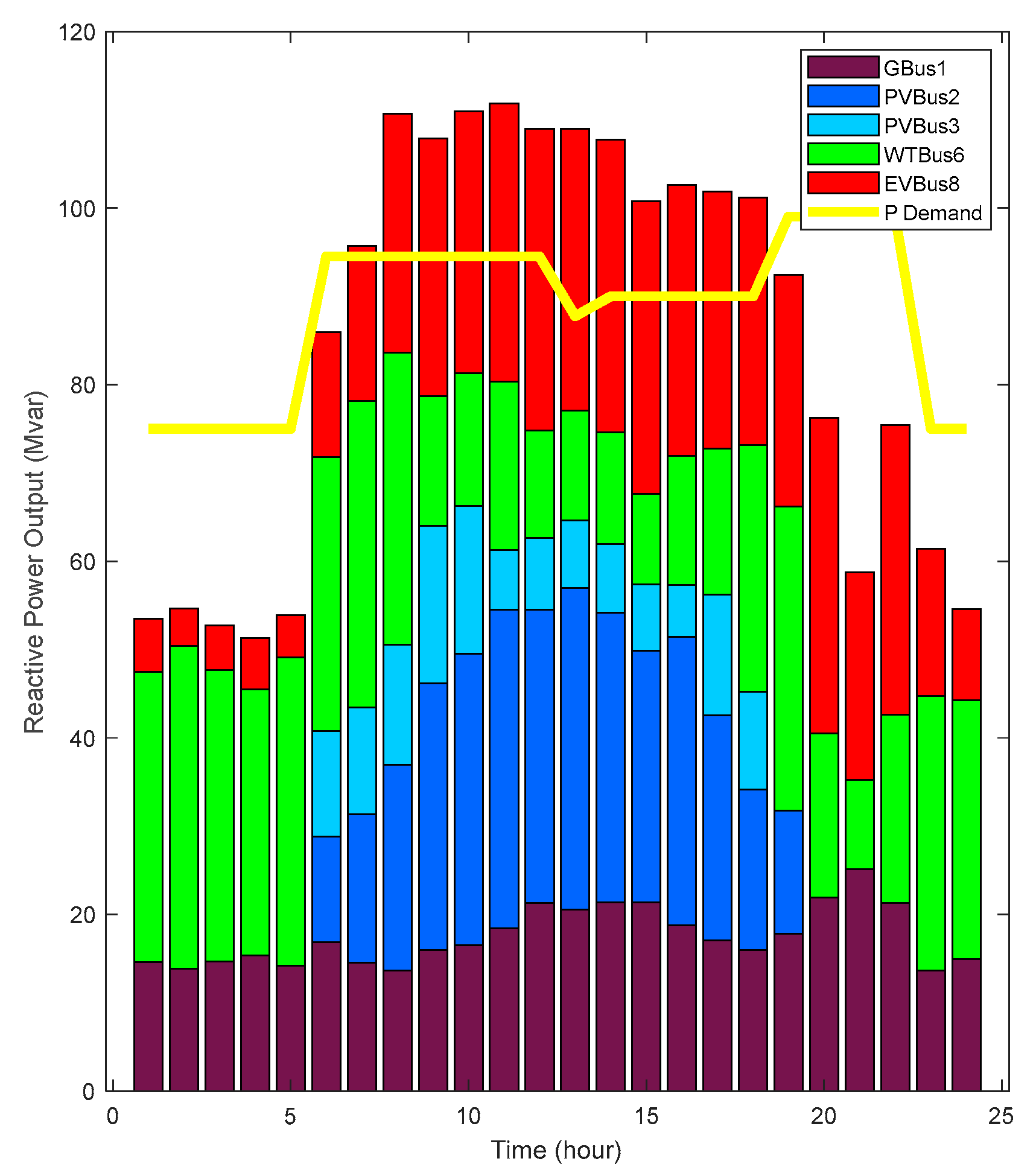
4.2.3. Power Output Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, M.; Chen, J.; Du, Z.; Wang, S.; Sun, H. Economic Operation of Micro-grid Considering Regulation of Interactive Power. Proc. CSEE 2014, 34, 1013–1023. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.-H.; Kim, H.-M.J. Optimal operation of hybrid microgrid for enhancing resiliency considering fea-sible islanding and survivability. IET Renew Power Gener. 2017, 11, 846–857. [Google Scholar] [CrossRef]
- Ning, X.; Wang, T.; Chen, H.; Feng, D.; Han, L.; Wang, H.; Li, L. Reactive Power Voltage Optimization of Distribution Network Based on Goal Planning. Power Capacit. React. Compens. 2022, 43, 1–7. [Google Scholar] [CrossRef]
- Hu, Z.; Song, Y.; Xu, Z.; Luo, Z.; Zhan, K.; Jia, L. The Impacts and Utilization of Electric Vehicle Integration into the Power Grid. Proc. Chin. Soc. Electr. Eng. 2012, 32, 1–10+25. [Google Scholar]
- Zheng, L.; Wenbin, W.; Shengfeng, H.; Lijuan, L. Voltage adaptability of distributed photovoltaic access to a distribution network considering reactive power support. Power Syst. Prot. Control 2022, 50, 32–41. [Google Scholar] [CrossRef]
- Wu, X.; Sun, F.; Tian, W. Research on Reactive Power Optimization of Distribution Network with Distributed Generation. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022. [Google Scholar] [CrossRef]
- Yang, G.; Wang, Y.; Jia, Y.; Xu, G. Real-Time Reactive Power Regulation Capacity Assessment of DFIG Wind Farms. In Proceedings of the 2022 4th Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 25–28 March 2022; pp. 974–978. [Google Scholar] [CrossRef]
- GB/T 36995-2018; Voltage Ride-Through Capability Test Procedures for Wind Power Units. National Standard of the People’s Republic of China: Beijing, China, 2018.
- Di Noia, L.P.; Mottola, F.; Proto, D.; Rizzo, R. Real Time Scheduling of a Microgrid Equipped with Ultra-Fast Charging Stations. Energies 2022, 15, 816. [Google Scholar] [CrossRef]
- Mao, L.; Zhang, Z.; Zhao, J.; Qu, K.; Li, F. Research Status and Prospects of Fusion Technology of Vehicle-Charging Pile-Power Grid. Trans. China Electrotech. Soc. 2022, 37, 6357–6371. [Google Scholar] [CrossRef]
- Zeng, B.; Li, Y.; Feng, J.; Zhang, J.; Liu, Z. A Combinatorial Planning Method for Distributed Generation and Intelligent Parking Lots Considering Reactive Supporting Capability of Electric Vehicles. Trans. China Electrotech. Soc. 2017, 32, 185–197. [Google Scholar] [CrossRef]
- Ding, T.; Lin, Y.; Bie, Z.; Chen, C.J. A resilient microgrid formation strategy for load restoration considering master-slave distributed generators and topology reconfiguration. Appl. Energy 2017, 199, 205–216. [Google Scholar] [CrossRef]
- Zhang, K.; Yin, Z.; Yang, X.; Yan, Z.; Huang, Y. Reactive Power Compensation of Power Grid Based on V2G Reactive Power Dispatching. Electr. Power Constr. 2018, 39, 40–47. [Google Scholar]
- Melhem, F.Y.; Grunder, O.; Hammoudan, Z.; Moubayed, N. Energy Management in Electrical Smart Grid Environment Using Robust Optimization Algorithm. IEEE Trans. Ind. Appl. 2018, 54, 2714–2726. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Carli, R.; Dotoli, M. Robust Day-Ahead Energy Scheduling of a Smart Residential User Under Uncertainty. In Proceedings of the 2019 18th European Control Conference, Naples, Italy, 25–28 June 2019; pp. 935–940. [Google Scholar] [CrossRef]
- Tushar, M.H.K.; Zeineddine, A.W.; Assi, C. Demand-side management by regulating charging and discharging of the EV, ESS, and utilizing renewable energy. IEEE Trans. Ind. Inform. 2018, 14, 117–126. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, P. The Hierarchical Modeling Approach for Centralized Control Microgrid Cyber Physical System. Trans. China Electrotech. Soc. 2022, 42, 7088–7102. [Google Scholar] [CrossRef]
- Mignoni, N.; Carli, R.; Dotoli, M. Distributed Noncooperative MPC for Energy Scheduling of Charging and Trading Electric Vehicles in Energy Communities. IEEE Trans. Control Syst. Technol. 2023, 31, 2159–2172. [Google Scholar] [CrossRef]
- Wang, J.; Yang, R. On the procurement and pricing of reactive power service in the electricity market environment. Electr. Power 2004, 3, 65–68. [Google Scholar]
- Cai, H.; Yang, J.; Feng, D.; Liu, J.; Zhong, J.; Zhang, L. Proposal for Reactive Power Pricing Policies at Demand Side. Autom. Electr. Power Syst. 2013, 37, 203–207. [Google Scholar] [CrossRef]
- Lu, Z.; Liu, Y.; Yang, F.; Geng, L.; Liu, M. Active power and reactive power optimal dispatch of microgrid considered reactive power rewards and penalties charge. Acta Energiae Solaris Sin. 2020, 41, 51–59. [Google Scholar]
- 2023 New Energy Electric Vehicle Sales Ranking. Available online: https://www.modiauto.com.cn/rank/ (accessed on 27 February 2023).
- Chang, X.; Song, Z.; Wang, J. Electric Vehicle Charging Load Prediction and System Development Based on Monte Carlo Algorithm. High Volt. Appar. 2020, 56, 1–5. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Yao, W.; Chung, C.Y.; Wen, F.; Qin, M.; Xue, Y. Scenario-based comprehensive expansion planning for distribution systems considering integration of plug-in electric vehicles. IEEE Trans. Power Syst. 2016, 31, 317–328. [Google Scholar] [CrossRef]
- 14 Bus Power Flow Test Case. Power Systems Test Case Archive. Available online: https://labs.ece.uw.edu/ (accessed on 6 October 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Moment t | Daily Driving Distance x | |
|---|---|---|
| 6:00–18:00 | 18:00–6:00 (Next day) | |
| From Bus | To Bus | Branch Resistance (R) | Branch Reactance (X) | Susceptance (B) |
|---|---|---|---|---|
| 1 | 2 | 0.01938 | 0.05917 | 0.0528 |
| 1 | 5 | 0.05403 | 0.22304 | 0.0492 |
| 2 | 3 | 0.04699 | 0.19797 | 0.0438 |
| 2 | 4 | 0.05811 | 0.17632 | 0.034 |
| 2 | 5 | 0.05695 | 0.17388 | 0.0346 |
| 3 | 4 | 0.06701 | 0.17103 | 0.0128 |
| 4 | 5 | 0.01335 | 0.04211 | 0 |
| 4 | 7 | 0 | 0.20912 | 0 |
| 4 | 9 | 0 | 0.55618 | 0 |
| 5 | 6 | 0 | 0.25202 | 0 |
| 6 | 11 | 0.09498 | 0.1989 | 0 |
| 6 | 12 | 0.12291 | 0.25581 | 0 |
| 6 | 13 | 0.06615 | 0.13027 | 0 |
| 7 | 8 | 0 | 0.17615 | 0 |
| 7 | 9 | 0 | 0.11001 | 0 |
| 9 | 10 | 0.03181 | 0.0845 | 0 |
| 9 | 14 | 0.12711 | 0.27038 | 0 |
| 10 | 11 | 0.08205 | 0.19207 | 0 |
| 12 | 13 | 0.22092 | 0.19988 | 0 |
| 13 | 14 | 0.17093 | 0.34802 | 0 |
| Bus Number | Active Demand (MVA) | Reactive Demand (Mvar) | Voltage Level | Bus Type |
|---|---|---|---|---|
| 1 | 0 | 0 | High | 0 |
| 2 | 21.7 | 12.7 | High | PV |
| 3 | 94.2 | 19 | High | PV |
| 4 | 47.8 | −3.9 | High | PQ |
| 5 | 7.6 | 1.6 | High | PQ |
| 6 | 11.2 | 7.5 | Low | PV |
| 7 | 1.1 | 1.5 | Low | PQ |
| 8 | x | x | Low | PV |
| 9 | 29.5 | 16.6 | Low | PQ |
| 10 | 9 | 5.8 | Low | PQ |
| 11 | 3.5 | 1.8 | Low | PQ |
| 12 | 6.1 | 1.6 | Low | PQ |
| 13 | 13.5 | 5.8 | Low | PQ |
| 14 | 14.9 | 5 | Low | PQ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Yang, J.; Jiang, W. Optimal Scheduling Strategy of Microgrid Based on Reactive Power Compensation of Electric Vehicles. Energies 2023, 16, 7507. https://doi.org/10.3390/en16227507
Fang Y, Yang J, Jiang W. Optimal Scheduling Strategy of Microgrid Based on Reactive Power Compensation of Electric Vehicles. Energies. 2023; 16(22):7507. https://doi.org/10.3390/en16227507
Chicago/Turabian StyleFang, Yixiao, Junjie Yang, and Wei Jiang. 2023. "Optimal Scheduling Strategy of Microgrid Based on Reactive Power Compensation of Electric Vehicles" Energies 16, no. 22: 7507. https://doi.org/10.3390/en16227507
APA StyleFang, Y., Yang, J., & Jiang, W. (2023). Optimal Scheduling Strategy of Microgrid Based on Reactive Power Compensation of Electric Vehicles. Energies, 16(22), 7507. https://doi.org/10.3390/en16227507