


Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
Literature Review
- ▪
- Fluctuations in wind energy production: One of the primary obstacles in the use of wind energy is its sensitivity to changing weather conditions. Variations in wind intensity and direction result in oscillations in wind energy production.
- ▪
- Integration of wind energy into an existing network: Incorporating wind farms into an existing electrical grid can pose stability challenges, especially when it comes to synchronizing electricity supply and demand.
2. Modeling of Wind Turbine and PMSG
2.1. Modeling of Wind Turbine
2.2. PMSG Modeling
3. Adaptive Backstepping Algorithm
3.1. Backstepping Principle
- Controller Gains: The gains determine the speed at which the controller responds to errors and variations.
- Update Frequency: The frequency at which the controller is updated can impact the system’s responsiveness.
- Parameter Adaptation: Certain adaptive backstepping controls adjust their parameters based on system variations over time.
- System Constraints: Specific characteristics of the wind turbine system, such as voltage or speed limits, may require specific parameter adjustments to ensure the control operates within acceptable limits.
3.1.1. Implementing Backstepping Algorithm for PMSG
3.1.2. Employing Non-Adaptive Backstepping Algorithm on PMSG
- Step 1: Designing the Controller for Mechanical Rotational Speed:
- Step 2: Formulating the Controller for Stator Current Components:
- Step 3: Designing Actual Control Inputs and Conducting Stability Analysis:
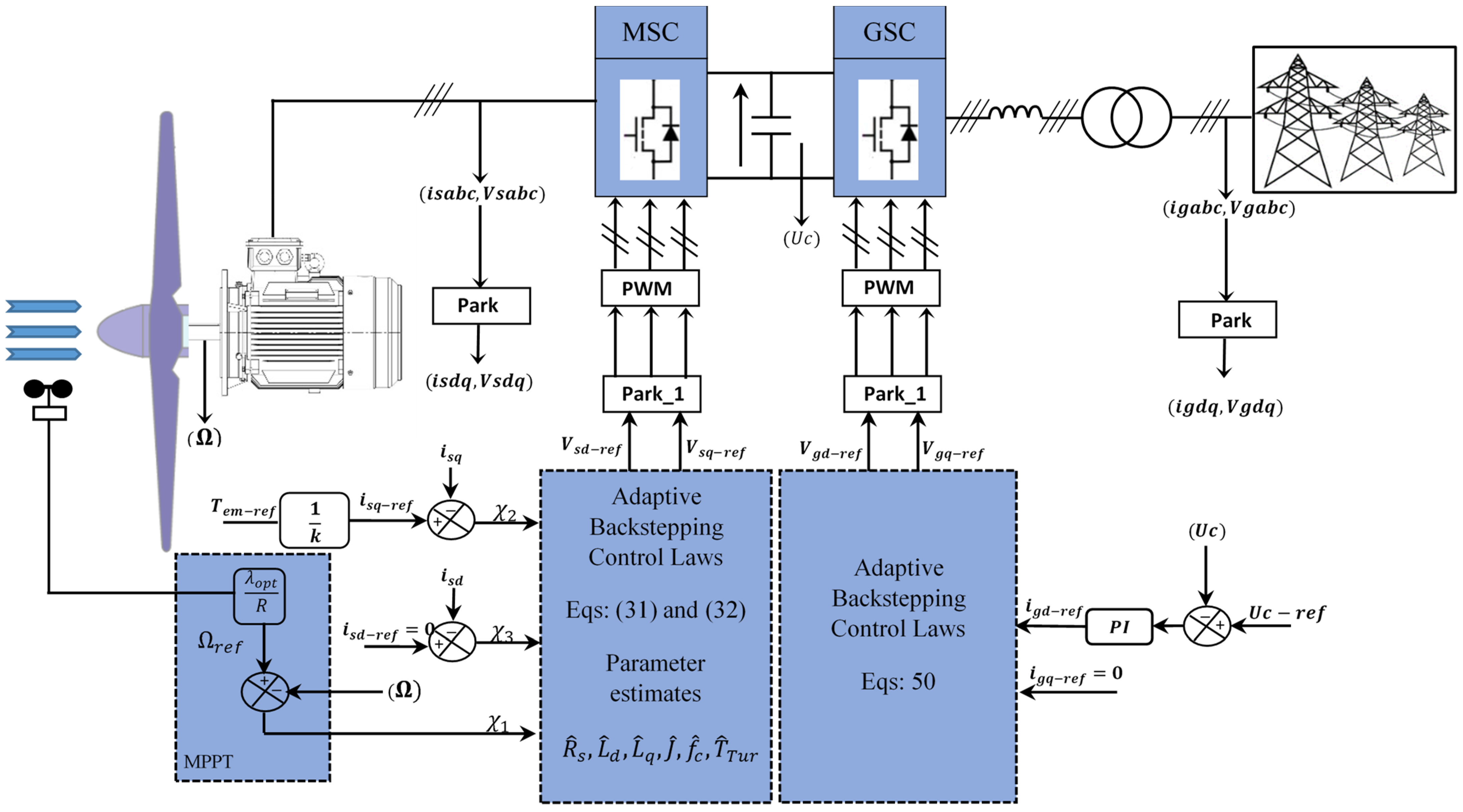
3.1.3. Application of Adaptive Backstepping Algorithm to PMSG
3.1.4. Parameter Adaptation and Analysis of Stability
3.1.5. Control of the Grid-Side Converter
- ▪
- igd_ref = 0: This choice ensures the elimination of reactive power, thereby facilitating the transmission of electrical power to the grid with the power factor of unity.
- ▪
- igq_ref: The DC bus voltage regulation is pursued to enable the management of the active power transfer to the electrical grid.
4. Performance Test Using Matlab–Simulink
4.1. Performance Test
4.2. Discussion of Results
5. Experimental Validation
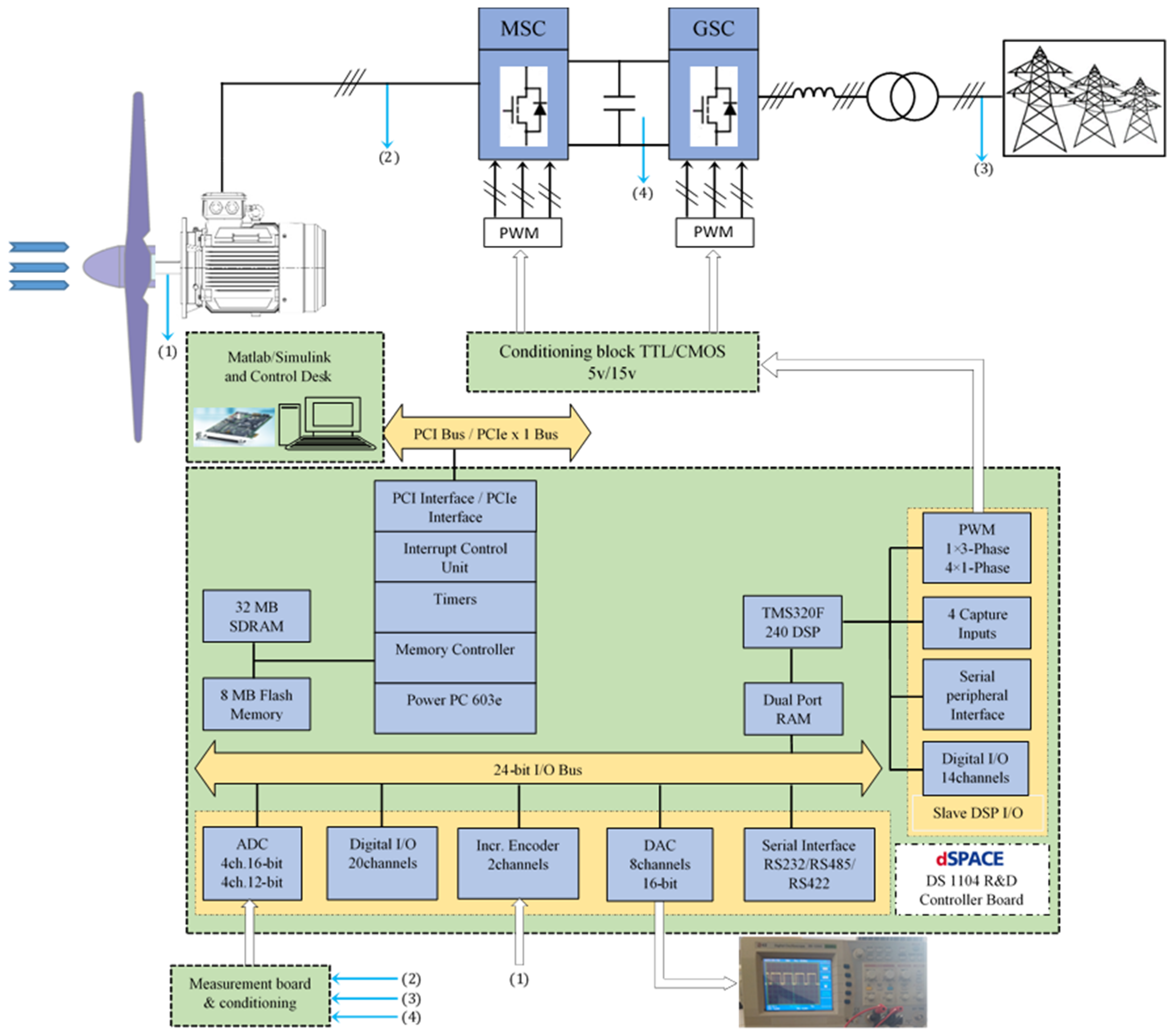
5.1. Description of Experimental Platform
- ▪
- Modeling in Matlab–Simulink: Initially, the control system, including the model of the wind turbine’s electrical system, as well as the adaptive backstepping controller, was modeled within the Matlab–Simulink environment. This modeling encompasses all the equations and components necessary to accurately represent the system.
- ▪
- Real-time Simulation: In the simulation stage, the authors executed the Simulink model in real-time mode. This means that the Simulink model operates with strict temporal synchronization, simulating the real-time behavior of the wind turbine’s electrical system.
- ▪
- Interface with the dSPACE 1104 board: The dSPACE 1104 board was utilized to interface the real-time Simulink model with the physical hardware. The dSPACE board is capable of reading signals generated by the Simulink model and converting them into physical signals that can be used to control the real system, such as controllers or for display on an oscilloscope.
- ▪
- Real-time Execution: The real-time Simulink model was executed on the dSPACE 1104 board, which acts as a real-time processor. This real-time execution enables the testing and validation of the adaptive backstepping controller under conditions closely resembling reality, with signals observed on an oscilloscope.
- ▪
- Data Collection and Analysis: During real-time execution, the authors collected data on the system’s behavior, including control signals and some physical signals. These data were subsequently analyzed to assess the performance of the adaptive backstepping controller and to compare the results with the research objectives.
- ▪
- DSPACE 1104 kit integrated into a computer.
- ▪
- DS1104 board connection panel.
- ▪
- Host PC equipped with the Matlab/Simulink environment and Control-Desk 7.6 software.
- ▪
- Voltage level adaptation probe.
- ▪
- Oscilloscope for visualizing various analog signals.
- ▪
- Developing the control system via the Simulink modeling tool.
- ▪
- Conducting simulations to generate a range of control results.
- ▪
- Transferring the program as C code to dSPACE using the Real-Time Workbench (RTW) utility.
- ▪
- Executing the comprehensive model in real-time via the DS1104 R&D board.
5.2. dSPACE 1104 Digital Processing System
5.3. Results of Implementing the Adaptive Backstepping Control
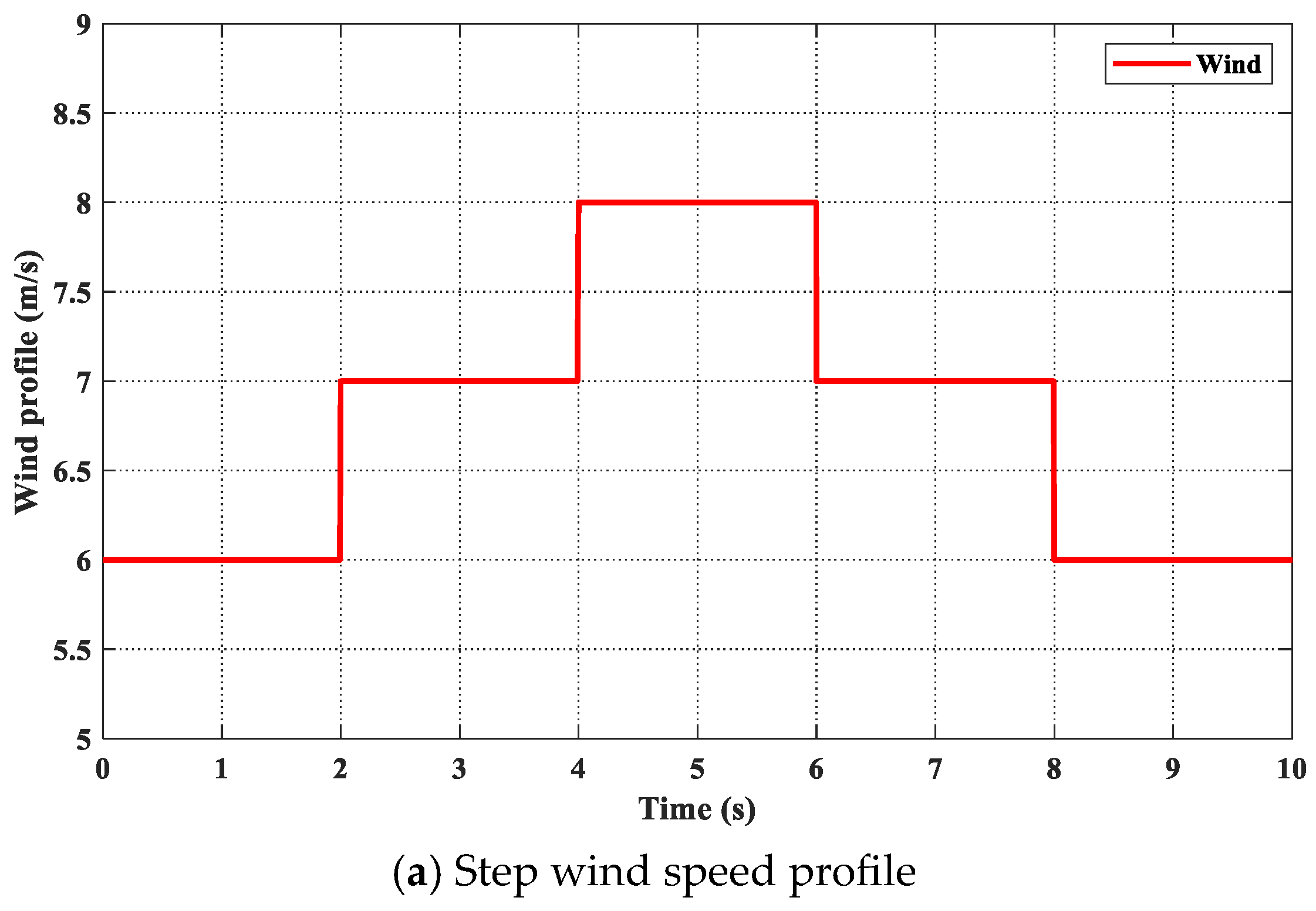
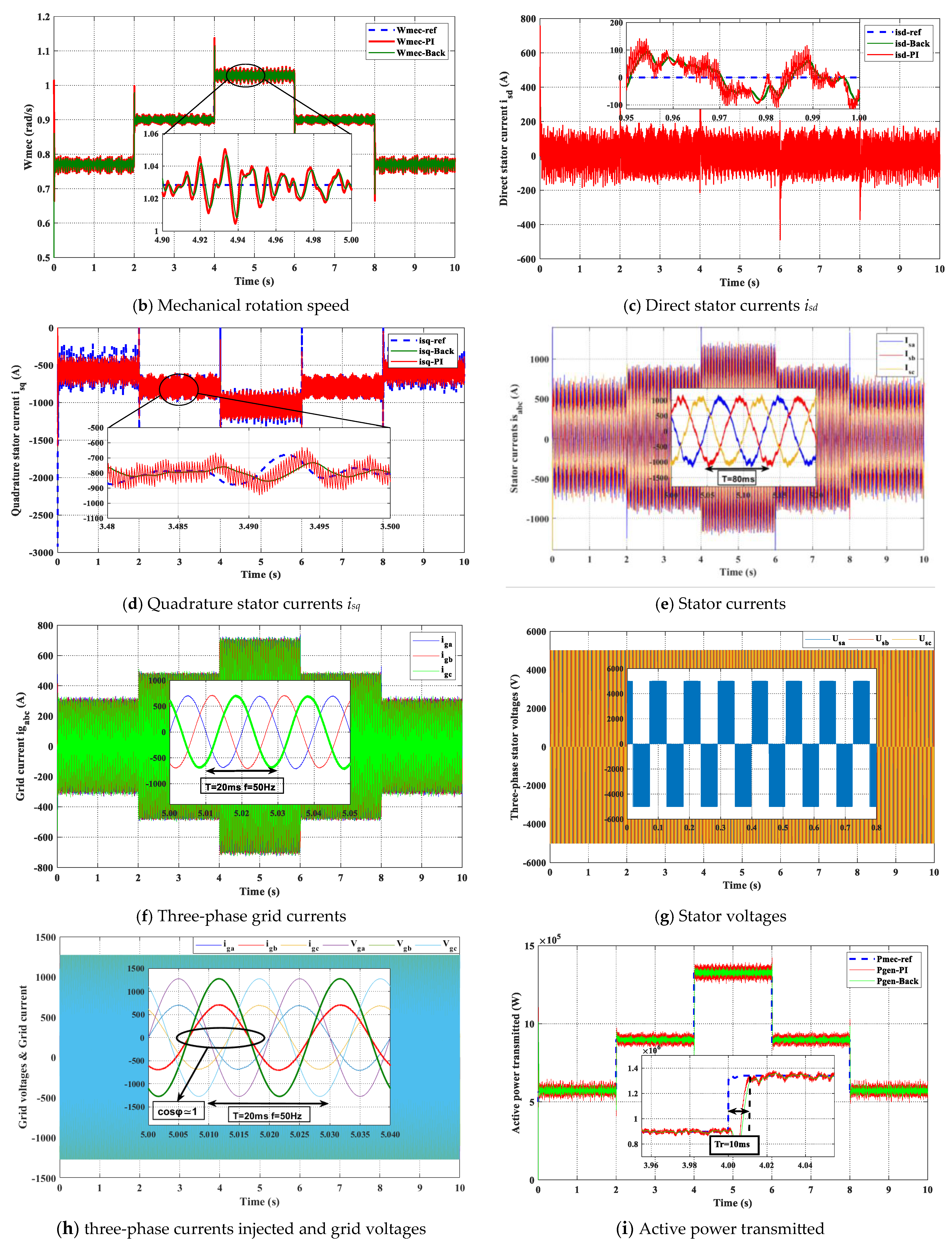
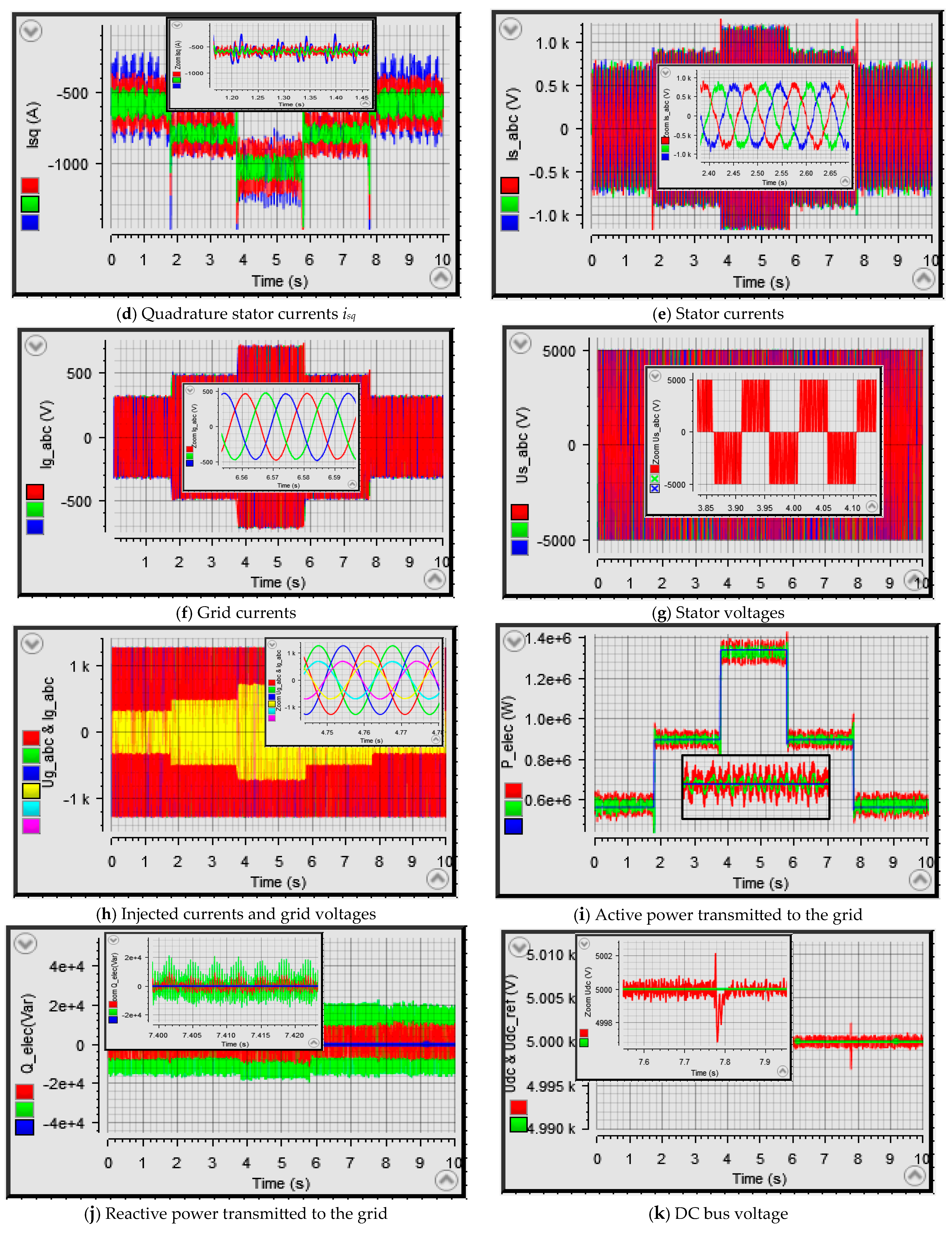
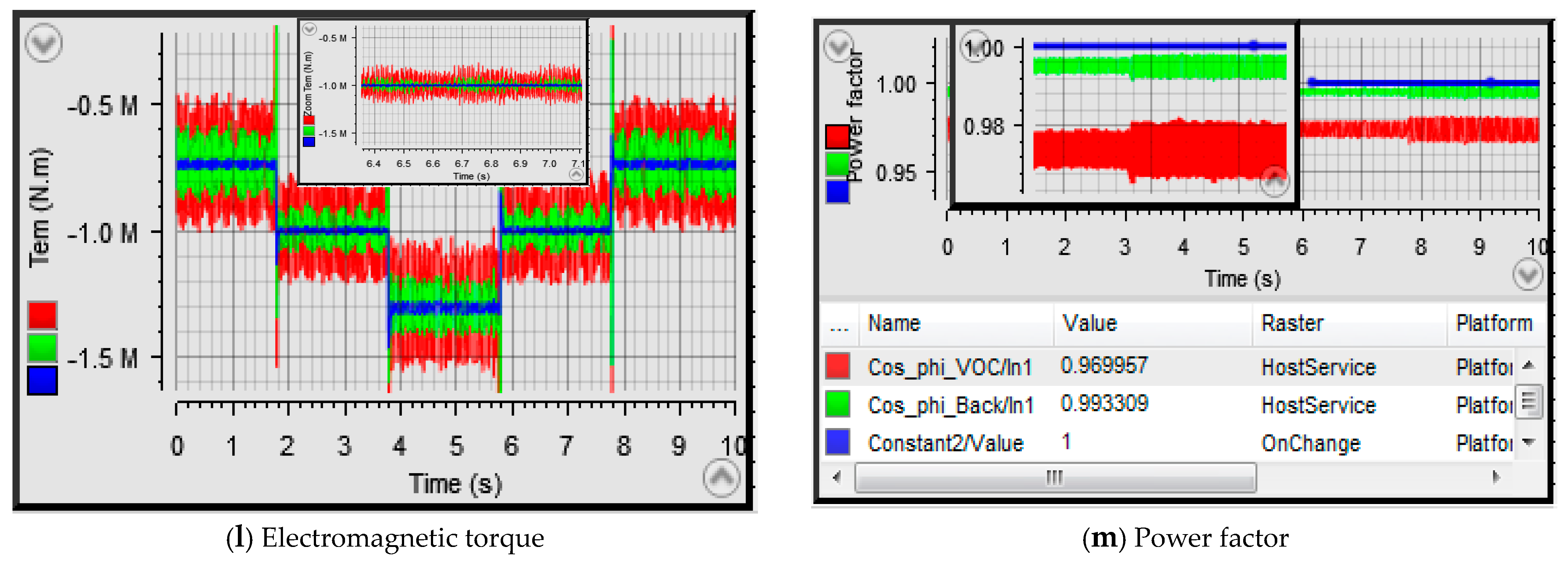
5.3.1. Performance Test for Wind Steps
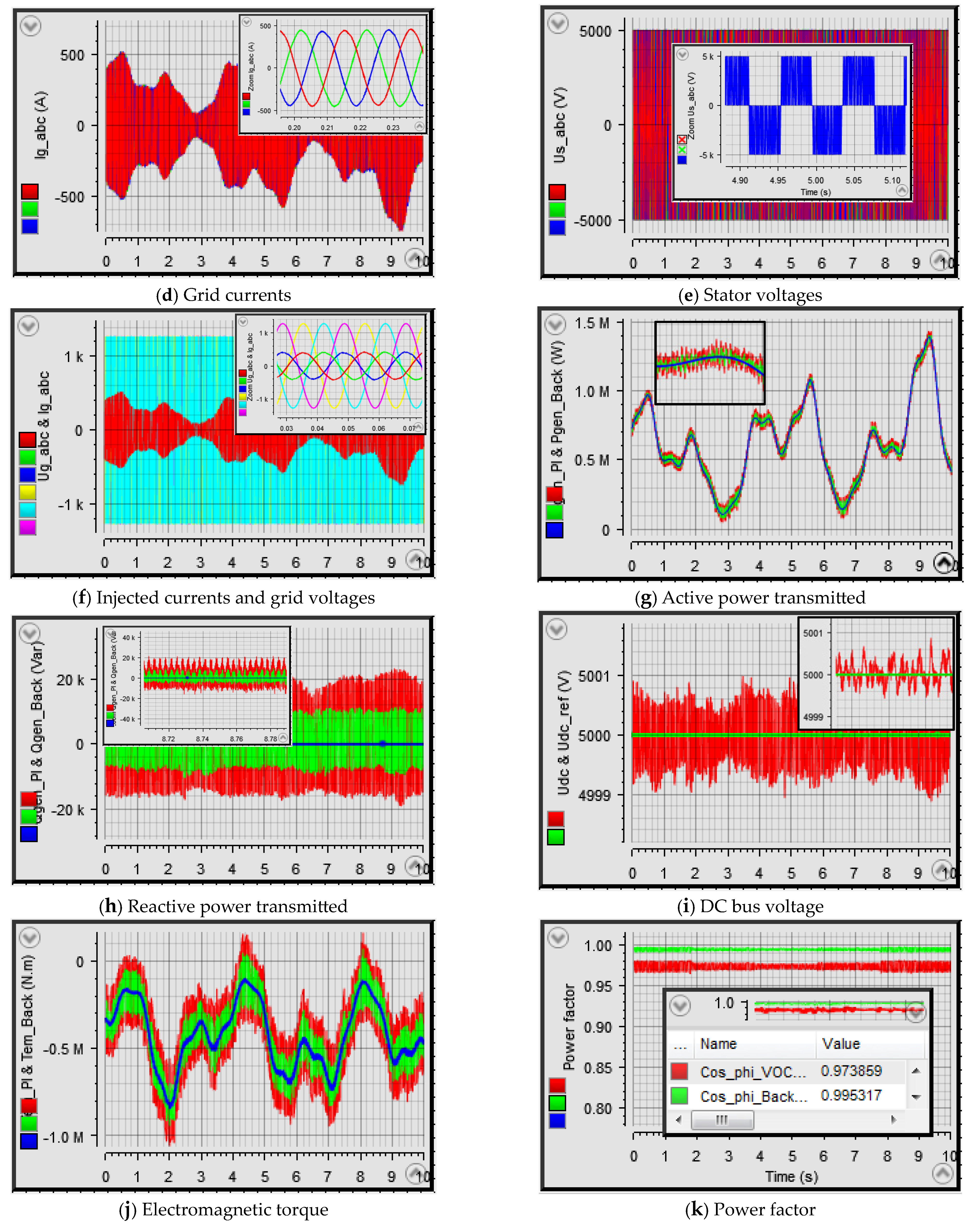
5.3.2. Set-Point Tracking Test in Fluctuating Wind
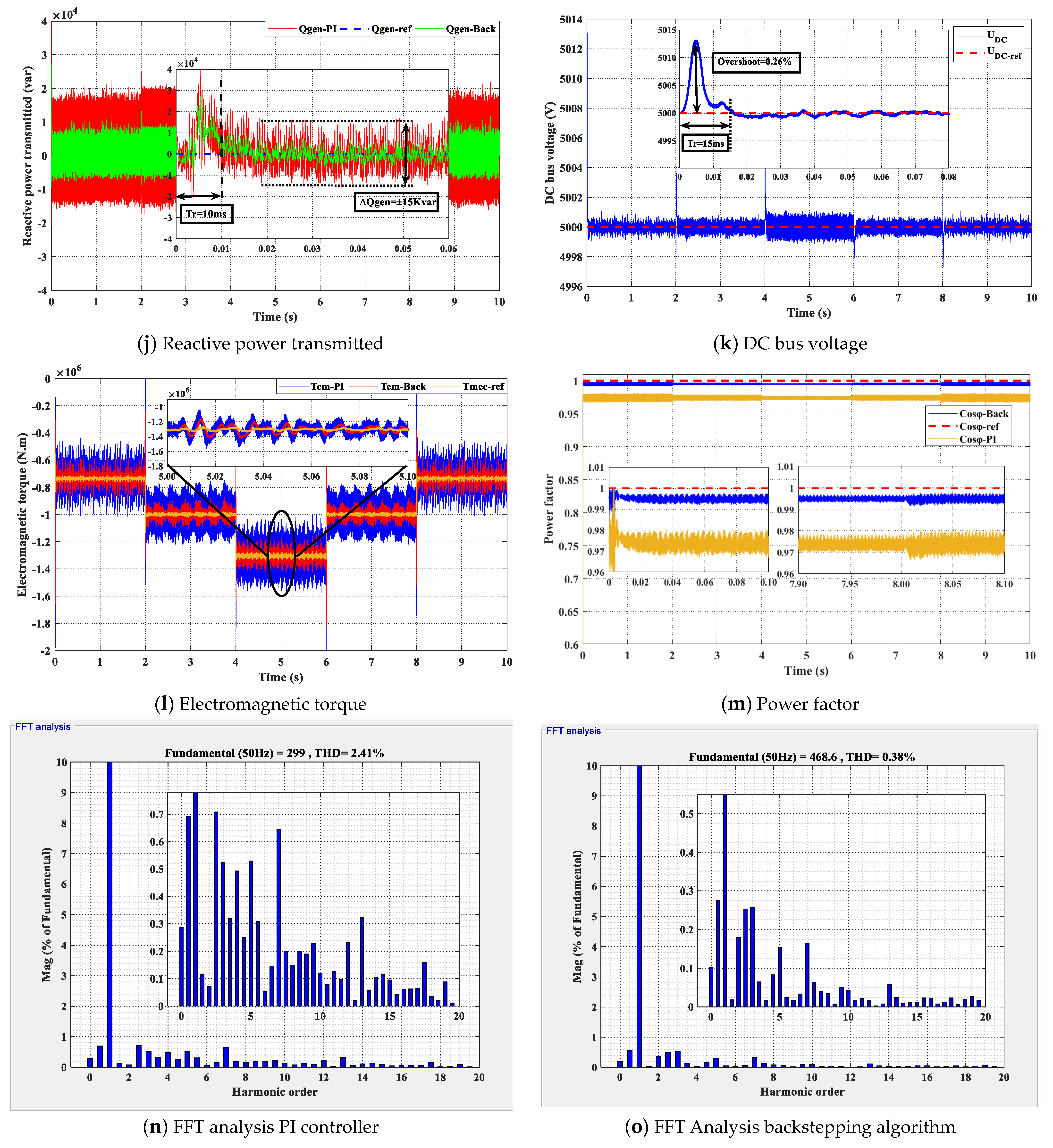
5.3.3. Discussion of Experimental Results
5.3.4. Visualization of Analog Signals
6. Conclusions
- ▪
- An exceptionally low total harmonic distortion (THD) of the injected grid currents, approximately 0.38%.
- ▪
- A significant reduction in the overshooting of electrical quantities.
- ▪
- Decreased magnitude ripples compared to the classic vector controller.
- ▪
- The conclusive validation of the simulation results in Matlab/Simulink compared to the experimental data, facilitated by the ControlDesk tool.
- ▪
- The ensuring of the operation with a unity power factor, achieved through the effective regulation of both active and reactive power injected into the electrical grid.
- ▪
- Ultimately, the demonstration of the robustness of adaptive control in terms of tracking and regulation across various parameter sets.
- ▪
- The development of a comprehensive test bench that integrates the PMSG, power converters, wind emulator and the dSPACE DS1104 prototyping board to validate the adaptive backstepping control algorithm.
- ▪
- The development of an advanced simulation model that incorporates the aforementioned variables, particularly during three-phase faults and scenarios of asymmetric faults, in accordance with the current electrical grid codes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator and Wind Turbine | ||
|---|---|---|
| Parameters | Symbol | Values |
| Power generator | Pn | 1.5 MW |
| Pole number | p | 72 |
| Stator resistance | Rs | 6.25 mΩ |
| d axis inductance | Ld | 4.229 mH |
| q axis inductance | Lq | 4.229 mH |
| Generator rotor flux | ψf | 11.1464 Wb |
| Radius of the turbine blade | R | 50 m |
| Turbine and generator Moment | J | 10,000 N.m |
| Viscous friction | fc | 0.015 N.m.s/rad |
| Specific density of air | ρ | 1.22 kg/m3 |
Nomenclature
| Vw | Wind speed (m/s) |
| Ω | Turbine/machine rotational speed (rad/s) |
| J | Turbine/machine total moment of inertia (Nm) |
| Friction forces (N m s/rad) | |
| Air power (W) | |
| Turbine power captured (W) | |
| Air density (Kg/m3) | |
| Turbine rotor surface (m2) | |
| Cp | Power coefficient (-) |
| λ | Tip speed ration (-) |
| β | Pitch angle (°) |
| Turbine blade radius (m) | |
| Generator electromagnetic torque (Nm) | |
| Turbine torque (Nm) | |
| Active generator power (W) | |
| Reactive generator power (Var) | |
| Number of pole pairs (-) | |
| Direct/quadrature stator voltage (V) | |
| Direct/quadrature stator current (A) | |
| Stator resistance (Ω) | |
| Stator cyclic inductors in the d-q plane (H) | |
| Rotor flux amplitude (Wb) | |
| Direct/quadrature stator flux amplitude (Wb) | |
| DC link voltage (V) | |
| Lyapunov’s candidate function (-) | |
| Variable machine error (-) | |
| Variable grid error (-) | |
| Positive constant (-) | |
| System parameter (-) | |
| Positive adaptation gain (-) | |
| Three-phase current at the inverter output (A) | |
| Three-phase grid voltages (V) | |
| Filter resistance (Ω) | |
| Filter inductance (H) | |
| Active power injected into the grid (W) | |
| Reactive power injected into the grid (Var) | |
| Power factor (-) | |
| f | Grid frequency (Hz) |
| Inverter arm switching states (-) |
References
- Ayub, M.W.; Hamza, A.; Aggidis, G.A.; Ma, X. A Review of Power Co-Generation Technologies from Hybrid Offshore Wind and Wave Energy. Energies 2023, 16, 550. [Google Scholar] [CrossRef]
- Fu, D.; Kong, L.; Gong, L.; Wang, A.; Jia, H.; Zhao, N. Wind Turbine Load Optimization Control Strategy Based on LIDAR Feed-Forward Control for Primary Frequency Modulation Process with Pitch Angle Reservation. Energies 2023, 16, 510. [Google Scholar] [CrossRef]
- El Mourabit, Y.; Derouich, A.; ElGhzizal, A.; El Ouanjli, N.; Zamzoum, O. Nonlinear Backstepping control of variable speed wind turbine based on permanent magnet synchronous generator. In Proceedings of the International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS), Fez, Morocco, 3–4 April 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Bousla, M.; Haddi, A.; El Mourabit, Y.; Sadki, A.; Mouradi, A.; El Kharrim, A. Detection and Prevention of Repetitive Major Faults of a WTG by Analysis of Alarms Through SCADA. In International Conference on Digital Technologies and Applications; Springer: Cham, Switzerland, 2023; pp. 745–752. [Google Scholar]
- Tao, S.; Zhao, L.; Liu, Y.; Liao, K. Impedance Network Model of D-PMSG Based Wind Power Generation System Considering Wind Speed Variation for Sub-Synchronous Oscillation Analysis. IEEE Access 2020, 8, 114784–114794. [Google Scholar] [CrossRef]
- El Mourabit, Y.; Derouich, A.; Allouhi, A.; El Ghzizal, A.; El Ouanjli, N.; Zamzoumyes, O. Sustainable production of wind energy in the main Morocco’s sites using permanent magnet synchronous generators. Int. Trans. Electr. Energy Syst. 2020, 30, e12390. [Google Scholar] [CrossRef]
- Le, X.C.; Duong, M.Q.; Le, K.H. Review of the Modern Maximum Power Tracking Algorithms for Permanent Magnet Synchronous Generator of Wind Power Conversion Systems. Energies 2023, 16, 402. [Google Scholar] [CrossRef]
- Salime, H.; Bossoufi, B.; Motahhir, S.; El Mourabit, Y. A novel combined FFOC-DPC control for wind turbine based on the permanent magnet synchronous generator. Energy Rep. 2023, 9, 3204–3221. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, Y.; Ye, Z. Current Sensors Offset Fault Online Estimation in Permanent Magnet Synchronous Generator (PMSG) Drives for Offshore Wind Turbines. IEEE Access 2021, 9, 135996–136003. [Google Scholar] [CrossRef]
- Zamzoum, O.; Derouich, A.; Motahhir, S.; El Mourabit, Y.; El Ghzizal, A. Performance analysis of a robust adaptive fuzzy logic controller for wind turbine power limitation. J. Clean. Prod. 2020, 265, 121659. [Google Scholar] [CrossRef]
- IEEE Std 519-2014 (Revision of IEEE Std 519-1992); IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 2014; pp. 1–29. [CrossRef]
- Ali, M.; Kotb, H.; Aboras, K.M.; Abbasy, N.H. Design of Cascaded PI-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer. IEEE Access 2021, 9, 150715–150732. [Google Scholar] [CrossRef]
- Errouissi, R.; Al-Durra, A. A Novel PI-Type Sliding Surface for PMSG-Based Wind Turbine with Improved Transient Performance. IEEE Trans. Energy Convers. 2018, 33, 834–844. [Google Scholar] [CrossRef]
- Salime, H.; Bossoufi, B.; Zine Laabidine, N.; Saady, I.; Elalami, H.; Majout, B.; ELMourabit, Y. FOC-DPC Hybrid Structure of a Wind Energy Conversion System Based on PMSG. In International Conference on Digital Technologies and Applications; Springer: Cham, Switerland, 2022; pp. 693–702. [Google Scholar] [CrossRef]
- El Mourabit, Y.; Derouich, A.; ElGhzizal, A.; Zamzoum, O. Dynamic modeling and control of a wind turbine with MPPT control connected to the grid by using PMSG. In Proceedings of the 2017 International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Fez, Morocco, 22–24 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Asgharnia, A.; Shahnazi, R.; Jamali, A. Performance and robustness of optimal fractional fuzzy PID controllers for pitch control of a wind turbine using chaotic optimization algorithms. ISA Trans. 2018, 79, 27–44. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. A Grey Wolf Optimizer for Optimum Parameters of Multiple PI Controllers of a Grid-Connected PMSG Driven by Variable Speed Wind Turbine. IEEE Access 2018, 6, 44120–44128. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A Discrete-Time Direct Torque Control for Direct-Drive PMSG-Based Wind Energy Conversion Systems. IEEE Trans. Ind. Appl. 2015, 51, 3504–3514. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Z.; Kazmierkowski, M.P.; Rodríguez, J.; Kennel, R. Robust Predictive Control of Three-Level NPC Back-to-Back Power Converter PMSG Wind Turbine Systems with Revised Predictions. IEEE Trans. Power Electron. 2018, 33, 9588–9598. [Google Scholar] [CrossRef]
- AOsman, M.; Alsokhiry, F. Sliding Mode Control for Grid Integration of Wind Power System Based on Direct Drive PMSG. IEEE Access 2022, 10, 26567–26579. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Zhang, Y.; Chen, J.; Sang, Y.; Jiang, L. Passivity-based sliding-mode control design for optimal power extraction of a PMSG based variable speed wind turbine. Renew. Energy 2018, 119, 577–589. [Google Scholar] [CrossRef]
- Yang, B.; Zhong, L.; Yu, T.T.; Shu, H.; Cao, P.; An, N.; Sang, Y.; Jiang, L. PCSMC design of permanent magnetic synchronous generator for maximum power point tracking. IET Gener. Transm. Distrib. 2019, 13, 3115–3126. [Google Scholar] [CrossRef]
- Jafarian, M.; Ranjbar, A.M. Fuzzy modeling techniques and artificial neural networks to estimate annual energy output of a wind turbine. Renew. Energy 2010, 35, 2008–2014. [Google Scholar] [CrossRef]
- Calderaro, V.; Galdi, V.; Piccolo, A.; Siano, P. A fuzzy controller for maximum energy extraction from variable speed wind power generation systems. Electr. Power Syst. Res. 2008, 78, 1109–1118. [Google Scholar] [CrossRef]
- Pourebrahim, R.; Shotorbani, A.M.; Márquez, F.P.G.; Tohidi, S.; Mohammadi-Ivatloo, B. Robust Control of a PMSG-Based Wind Turbine Generator Using Lyapunov Function. Energies 2021, 14, 1712. [Google Scholar] [CrossRef]
- Morse, A.S.; Feurer, A. Adaptive control of single-input-single-ouput linear systems. IEEE Trans. Autom. Control 1978, 23, 557–569. [Google Scholar]
- Sussmann, H.J.; Kokotovic, V. A positive real condition for global stabilization of nonlinear systems. Syst. Control Lett. 1989, 13, 125–133. [Google Scholar]
- Tsinias, J. Sufficient lyapunov-like conditions for stabilization. Math. Control Signal Syst. 1989, 2, 343–357. [Google Scholar] [CrossRef]
- KanellaKopoulos, I.; Kokotovic, P.V.; Morse, A.S. Systematic Designof Adaptive Controllers for Feedback Linearizable Systems. IEEE Trans. Autom. Control 1991, 36, 1241–1253. [Google Scholar] [CrossRef]
- Freeman, R.A.; Kokotovic, P.V. A New Lyapunov Function for the Backstepping Design of ’Softer’ Robust Nonlinear Control Laws. In Proceedings of the Nonlinear Control System Design Symposium, Bordeaux, France, 24–26 June 1992. Technical Report no. CCEC-92-0520. [Google Scholar]
- El Mourabit, Y.; Derouich, A.; El Ghzizal, A.; El Ouanjli, N.; Zamzoum, O. Nonlinear backstepping control for PMSG wind turbine used on the real wind profile of the Dakhla-Morocco city. Int. Trans. Electr. Energy Syst. 2020, 30, e12297. [Google Scholar] [CrossRef]
- Beddar, A.; Bouzekri, H.; Babes, B.; Afghoul, H. Experimental enhancement of fuzzy fractional order PI + I controller of grid connected variable speed wind energy conversion system. Energy Convers. Manag. 2016, 123, 569–580. [Google Scholar] [CrossRef]
- Chakib, M.; Essadki, A.; Nasser, T. A comparative study of PI, RST and ADRC control strategies of a doubly fed induction generator based wind energy conversion system. Int. J. Renew. Energy Res. 2018, 8, 964–973. [Google Scholar]
- Ihedrane, Y.; Bekkali, C.; Ghamrasni, M.; Mensou, S.; Bossoufi, B. Improved wind system using non-linear power control. Indones. J. Electr. Eng. Comput. Sci. 2019, 14, 1148–1158. [Google Scholar] [CrossRef]
- Benamor, A.; Benchouia, M.T.; Srairi, K.; Benbouzid, M.E.H. A new rooted tree optimization algorithm for indirect power control of wind turbine based on a doubly-fed induction generator. ISA Trans. 2019, 88, 296–306. [Google Scholar] [CrossRef]
- Mourabit, Y.E.L.; Derouich, A.; Ghzizal, A.E.L.; Bouchnaif, J.; Ouanjli, N.E.L.; Zamzoum, O.; Mezioui, K.; Bossoufi, B. Implementation and validation of backstepping control for PMSG wind turbine using dSPACE controller board. Energy Rep. 2019, 5, 807–821. [Google Scholar] [CrossRef]
- Card Presentation «DSPACE DS 1104». Available online: www.dspace.com (accessed on 21 June 2023).



| Controller Type | FOC | Backstepping |
|---|---|---|
| Coordinate transformation | Required | Required |
| Torque ripple | Medium | Low |
| Currents ripple | Medium | Low |
| Reference tracking | Medium | Better |
| THD (%) | 2.41 | 0.38 |
| Facility of implementation | Simple | Complex |
| Algorithm complexity | Low | Complex |
| Publication Paper | [32] | [32] | [33] | [34] | [35] | Proposed Algorithm |
|---|---|---|---|---|---|---|
| Technic methods | (FOPI) | (FFOPI+I) | (ADRC) | (SMC) | RTO-PI | (ABC) |
| Generator used | PMSG | PMSG | DFIG (1.5 MW) | DFIG | DFIG (4 KW) | PMSG (1.5 MW) |
| Overshoot (%) | 12 | 4 | 21 | - | 1 | 0.26 |
| THD (%) | 4.5 | 4 | - | 3.99 | 3.21 | 0.38 |
| Response time (ms) | - | - | 27 | 549 | - | 10 |
| Power factor | 0.974 | 0.994 | - | - | 0.978 | 0.997 |
| Facility of implementation | Simple | Moderate–simple | Moderate–simple | Simple | Moderate–high | Complex |
| Algorithm complexity | Medium | Medium | Medium | Medium | Complex | Complex |
| performance | Low | Moderate–high | Low | Low | Moderate–high | High |
| Parameter | Value |
|---|---|
| DC bus voltage | 5000 V |
| DC Bus Capacitor | 20 mF |
| Filter resistance | 0.20 mΩ |
| Filter inductance | 10 mH |
| Sampling frequency | 10 KHz |
| Grid frequency | 50 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mourabit, Y.E.; Salime, H.; Bossoufi, B.; Motahhir, S.; Derouich, A.; Mobayen, S.; Zhilenkov, A. Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design. Energies 2023, 16, 7481. https://doi.org/10.3390/en16227481
Mourabit YE, Salime H, Bossoufi B, Motahhir S, Derouich A, Mobayen S, Zhilenkov A. Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design. Energies. 2023; 16(22):7481. https://doi.org/10.3390/en16227481
Chicago/Turabian StyleMourabit, Youness El, Hassna Salime, Badre Bossoufi, Saad Motahhir, Aziz Derouich, Saleh Mobayen, and Anton Zhilenkov. 2023. "Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design" Energies 16, no. 22: 7481. https://doi.org/10.3390/en16227481
APA StyleMourabit, Y. E., Salime, H., Bossoufi, B., Motahhir, S., Derouich, A., Mobayen, S., & Zhilenkov, A. (2023). Enhanced Performance in PMSG-Based Wind Turbine Systems: Experimental Validation of Adaptive Backstepping Control Design. Energies, 16(22), 7481. https://doi.org/10.3390/en16227481