


Hybrid Framework for Enhanced Dynamic Optimization of Intelligent Completion Design in Multilateral Wells with Multiple Types of Flow Control Devices




Abstract
:1. Introduction
2. Problem Formulation
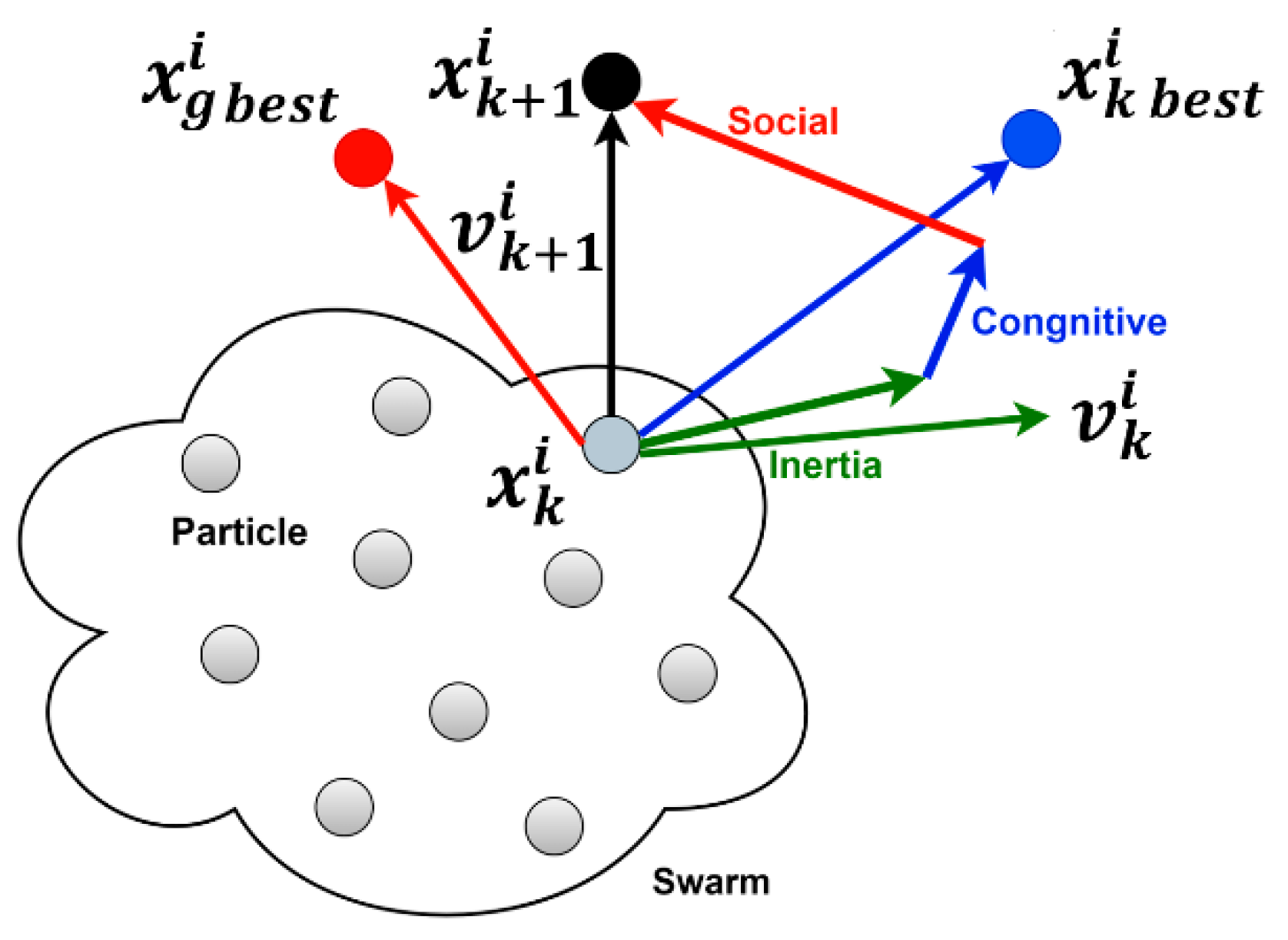
2.1. Particle Swarm Optimization (PSO)
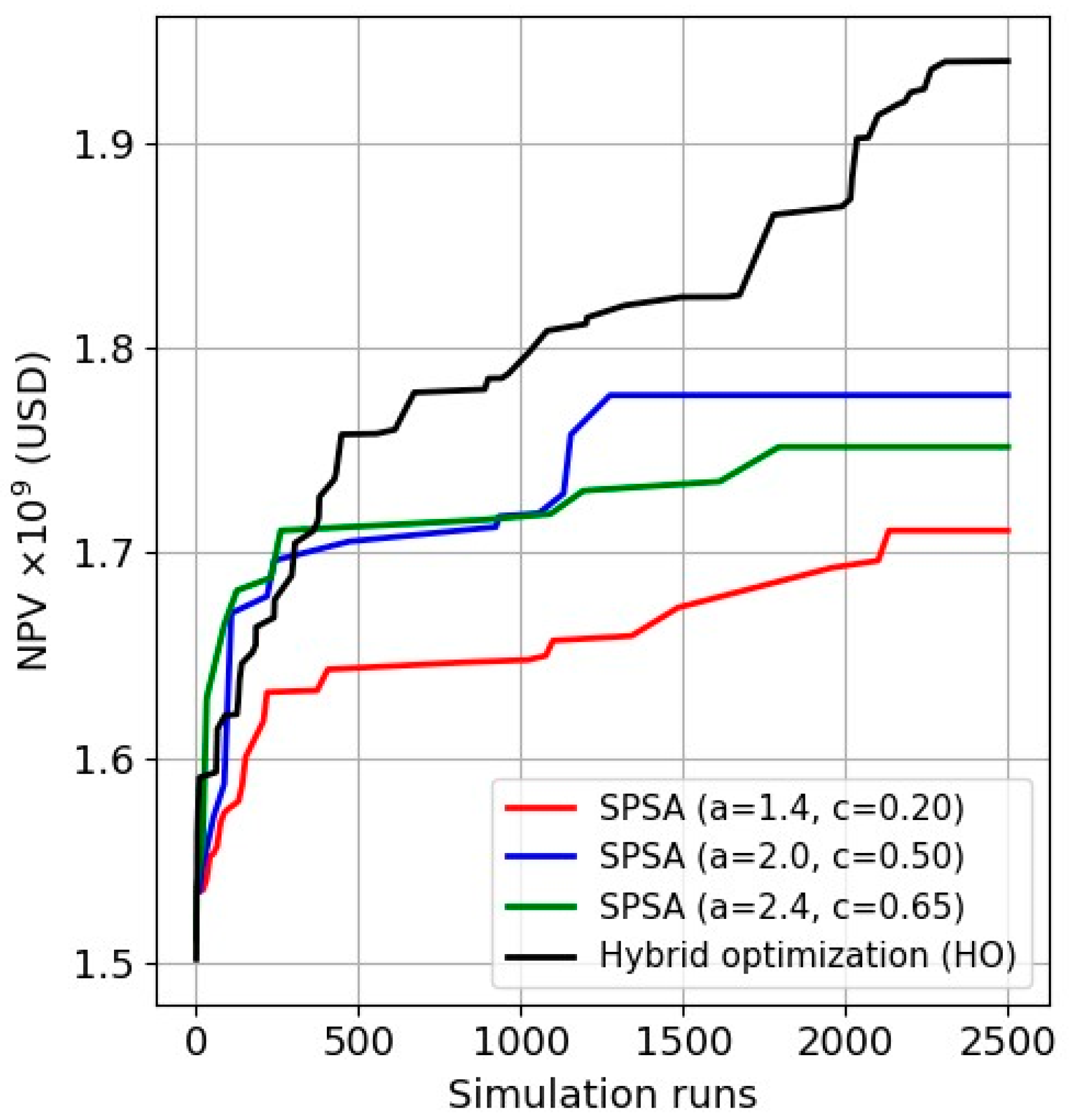
2.2. Simultaneous Perturbation Stochastic Approximation (SPSA)
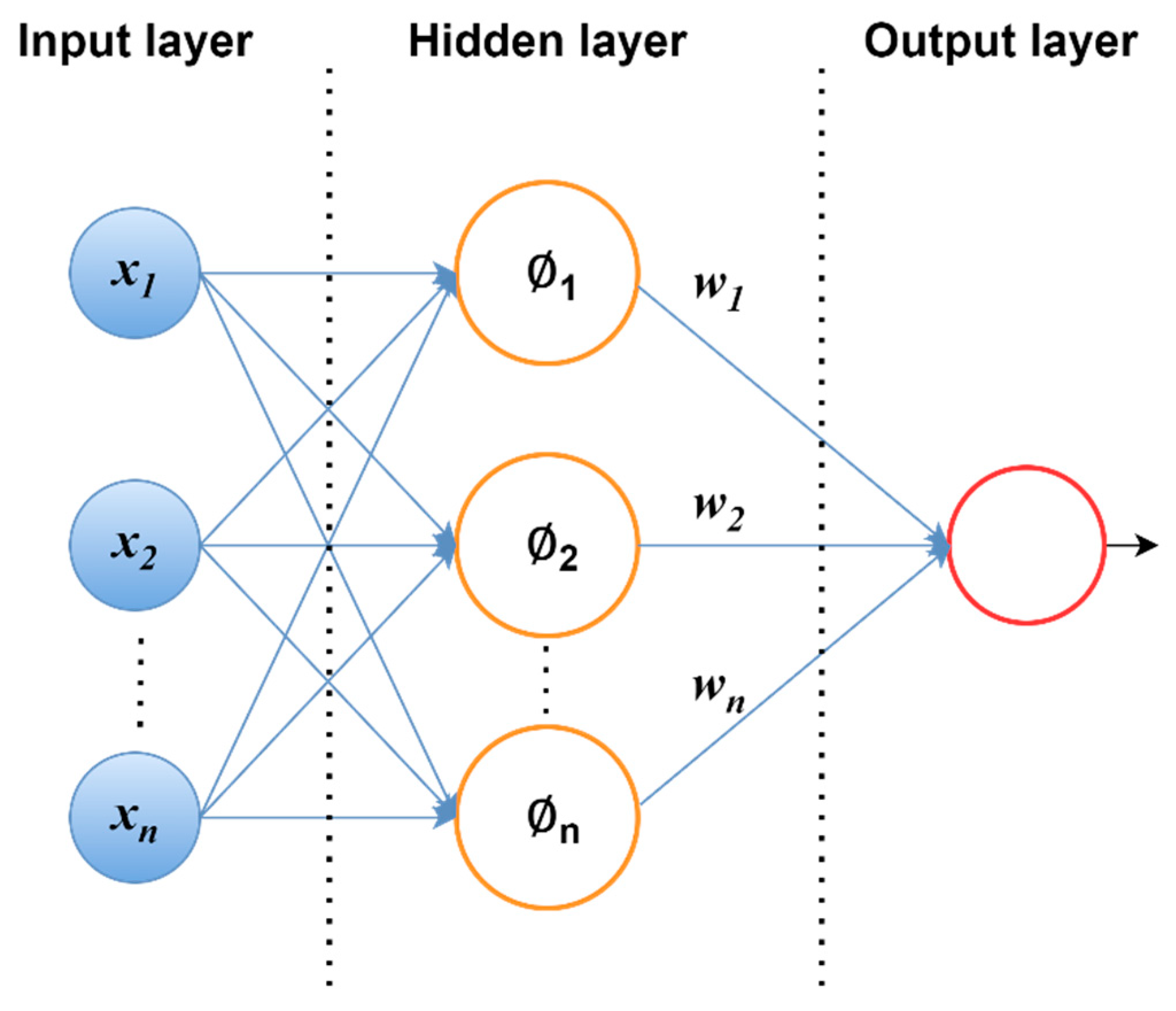
2.3. Surrogate Modelling Using Radial Basis Function (RBF)
2.4. Variogram Analysis of Response Surface (VARS)
- (1)
- It considers the main, interaction, and total effects of the input variables on the objective function (i.e., higher-order sensitivities), making it a robust tool in complex optimization problems. In contrast, other simplified sensitivity analysis techniques such as one-at-a-time [47], and local sensitivity analysis such as differential sensitivity analysis [48] do not consider these effects together. Applying such simplified techniques in complex optimization problems can result in incorrect and misleading outcomes.
- (2)
3. Methodology
3.1. Initial Optimization Stage
- (1)
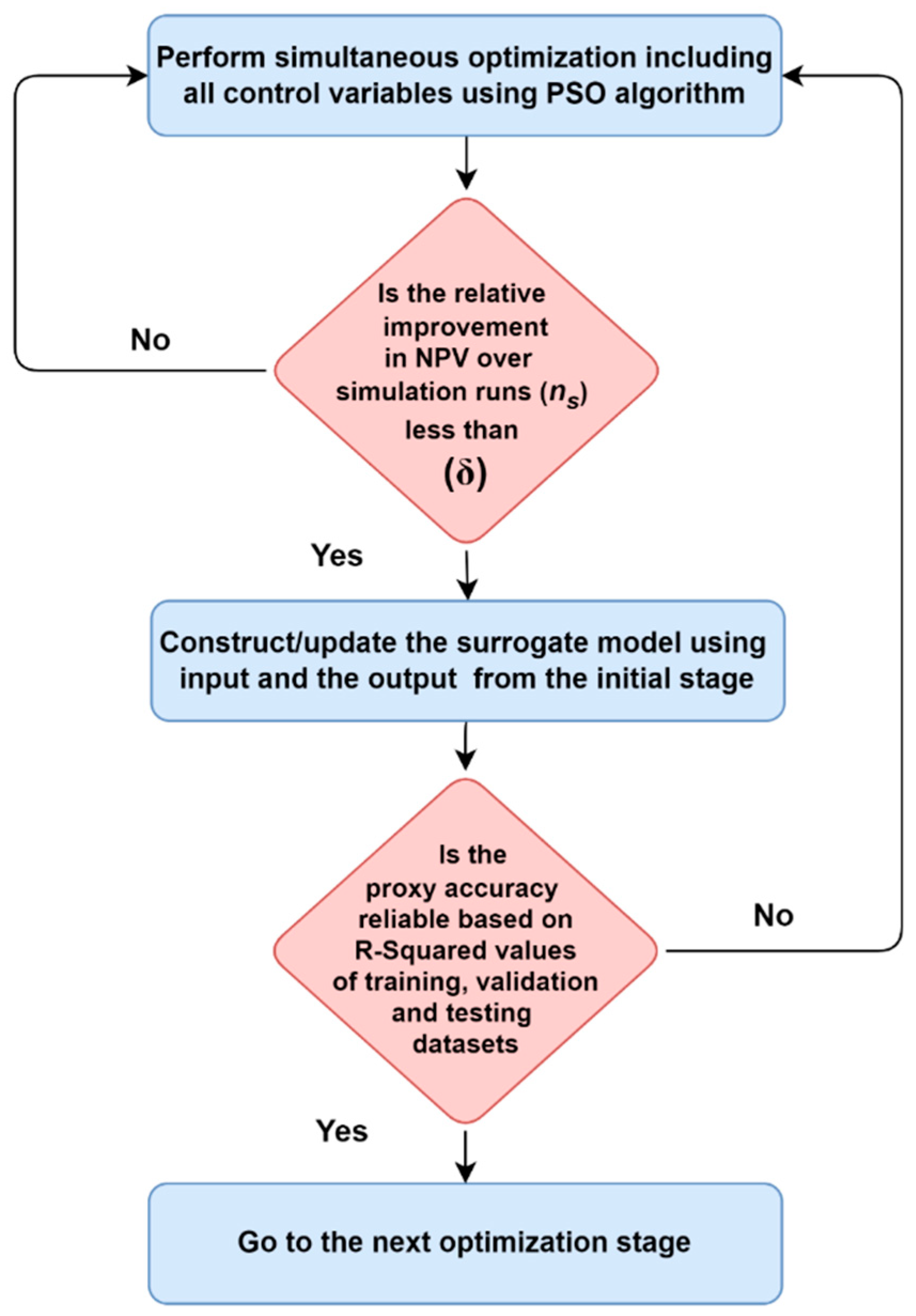
- The relative improvement () in the objective function over a specified number of simulation runs () is less than a threshold value () [28,54]. The relative improvement is calculated using Equation (16).where is the current objective function at which we calculate the relative improvement; is a previous objective function located at () simulation runs before the current objective function. In this work, = 500 and = 1% are used to calculate the relative improvement in the objective function.
- (2)
- The proxy model achieves a reasonable accuracy calculated based on the R-squared values for the training, validation, and testing sets using Equation (17):where and represent the sum of square error and the sum of total error, respectively. and are the objective functions (NPVs) obtained from the actual reservoir model and proxy model, respectively. are the average objective function values obtained from the simulator and is the size of the training, validation, and testing sets.
3.2. Enhanced Optimization Stage
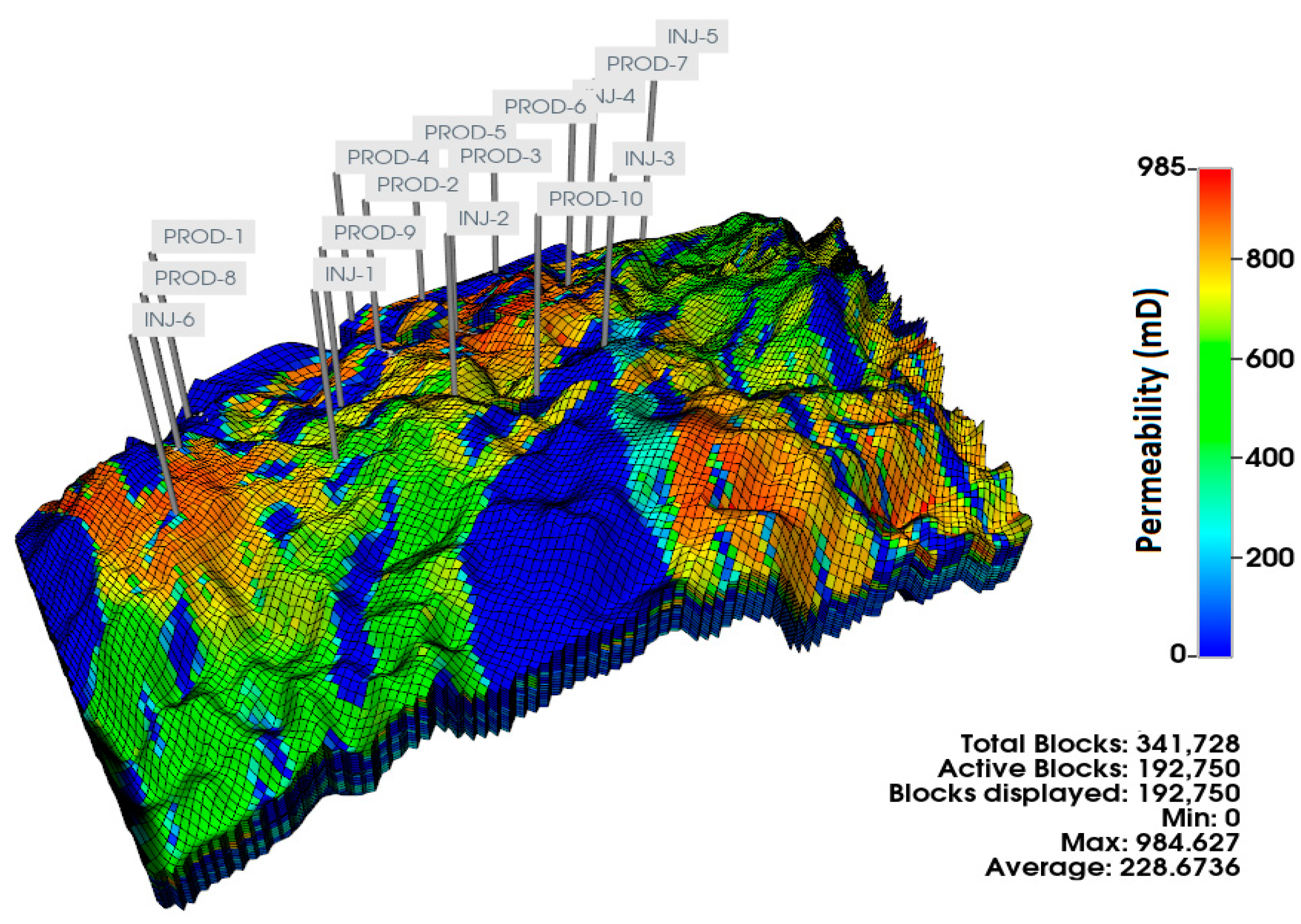
4. Case Study—Olympus Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AFCD | Autonomous flow control device |
| AICD | Autonomous inflow control device |
| AICV | Autonomous interval control valve |
| DE | Differential evolution |
| FCD | Flow control device |
| FD | Fluidic diode |
| GA | Genetic algorithm |
| HO | Hybrid optimization |
| ICD | Inflow control device |
| ICV | Interval control valve |
| IVARS | Integrated variogram across a range of scales |
| MADS | Mesh adaptive direct search |
| MLW | Multilateral well |
| NPV | Net Present Value |
| PSO | Particle swarm optimization |
| RBF | Radial basis function |
| RCP | Rate-controlled production |
| RMSE | Root-mean-square error |
| SPSA | Simultaneous Perturbation Stochastic Approximation |
| SSE | The Sum of the Square Error |
| SST | The Sum of the Total Error |
| STB | Stock Tank Barrels |
| USD | United States Dollar |
| VARS | Variogram Analysis of Response Surface |
| VND | Variable neighborhood descent |
Nomenclature (In the Order of Appearance)
| Net Present Value | |
| Total number of simulation steps | |
| Cost of water treatment or price of oil | |
| Production or injection rate | |
| Time | |
| Discount factor | |
| Optimization variable (see Equation (2)) | |
| Optimization variable’s velocity in PSO (see Equation (2)) | |
| Weights used in the PSO algorithm (see Equation (3)) | |
| A step size used in the SPSA algorithm (see Equation (4)) | |
| An approximated in the SPSA algorithm (see Equation (4)) | |
| A tuning parameter used in SPSA algorithm (see Equation (5)) | |
| A tuning parameter used in SPSA algorithm (see Equation (5)) | |
| A parameter defined in Equation (6) | |
| A parameter defined in Equation (6) | |
| A parameter defined in Equation (6) | |
| Weight of neuron (see Equation (11)) | |
| Gaussian density function (see Equation (11)) | |
| Distance scaling parameter | |
| Variance | |
| Perturbation size | |
| Expectation | |
| Relative improvement |
References
- Rosi, G.A.; Zhu, D.; Gates, I.D.; Wang, J. Passive flow control devices—Well design and physics of their different flow regimes: A review. J. Pet. Sci. Eng. 2022, 218, 110999. [Google Scholar] [CrossRef]
- Eltaher, E.; Muradov, K.; Davies, D.; Grassick, P. Autonomous flow control device modelling and completion optimisation. J. Pet. Sci. Eng. 2019, 177, 995–1009. [Google Scholar] [CrossRef]
- Moradi, A.; Samani, N.A.; Kumara, A.S.; Moldestad, B.M.E. Evaluating the performance of advanced wells in heavy oil reservoirs under uncertainty in permeability parameters. Energy Rep. 2022, 8, 8605–8617. [Google Scholar] [CrossRef]
- Addiego-Guevara, E.A.; Jackson, M.D.; Giddins, M.A. Insurance Value of Intelligent Well Technology against Reservoir Uncertainty. In Improved Oil Recovery Symposium; SPE: Tulsa, OK, USA, 2008. [Google Scholar]
- Sampaio, M.A.; Barreto, C.E.A.G.; Schiozer, D.J. Proactive Control Valves of Producer and Injector Intelligent Wells under Economic Uncertainty. In Proceedings of the EAGE Annual Conference & Exhibition Incorporating SPE EuropEC, Copenhagen, Denmark, 4–7 June 2012. [Google Scholar]
- Sefat, M.H.; Muradov, K.; Davies, D. Field Management by Proactive Optimisation of Intelligent Wells-A Practical Approach. In Proceedings of the SPE Middle East Intelligent Energy Conference and Exhibition, Dubai, United Arab Emirates, 28–30 October 2013. [Google Scholar]
- Naus, M.M.J.J.; Dolle, N.; Jansen, J. Optimization of Commingled Production Using Infinitely Variable Inflow Control Valves. SPE Prod. Oper. 2006, 21, 293–301. [Google Scholar] [CrossRef]
- Emerick, A.A.; Cunha, R.; Portella, M. Production Optimization With Intelligent Wells. In Proceedings of the SPE Latin American and Caribbean Petroleum Engineering Conference, Buenos Aires, Argentina, 15–18 April 2007. [Google Scholar]
- Alghareeb, Z.M.; University, S.; Aramco, S.; Horne, R.N.; Yuen, B.B.; Shenawi, S.H. Proactive Optimization of Oil Recovery in Multilateral Wells Using Real Time Production Data. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 4–7 October 2009. [Google Scholar]
- Almeida, L.F.; Vellasco, M.M.B.R.; Pacheco, M.A.C. Optimization system for valve control in intelligent wells under uncertainties. J. Pet. Sci. Eng. 2010, 73, 129–140. [Google Scholar] [CrossRef]
- Grebenkin, I.M.; Davies, D.R. A Novel Optimisation Algorithm for Inflow Control Valve Management. In Proceedings of the EAGE Annual Conference and Exhibition Incorporating SPE EuropEC, Copenhagen, Denmark, 4–7 June 2012. [Google Scholar]
- Asadollahi, M.; Nævdal, G.; Dadashpour, M.; Kleppe, J. Production optimization using derivative free methods applied to Brugge field case. J. Pet. Sci. Eng. 2014, 114, 22–37. [Google Scholar] [CrossRef]
- Augusto, M.; Pinto, S. Short-Term and Long-Term Optimizations for Reservoir Management with Intelligent Wells. In Proceedings of the SPE Latin American and Caribbean Petroleum Engineering Conference, Quito, Ecuador, 18–20 November 2015. [Google Scholar]
- Vasper, A.; Endre, J.; Mjos, S.; Thi, T.; Duong, T. Efficient Optimization Strategies for Developing Intelligent Well Business Cases. In Proceedings of the SPE Intelligent Energy International Conference and Exhibition, Aberdeen, UK, 6–8 September 2016. [Google Scholar]
- Botechia, V.E.; Araújo de Lemos, R.; Hohendorff Filho JC von Schiozer, D.J. Well and ICV management in a carbonate reservoir with high gas content. J. Pet. Sci. Eng. 2021, 200, 108345. [Google Scholar] [CrossRef]
- Farahi, M.M.M.; Ahmadi, M.; Dabir, B. Model-based water-flooding optimization using multi-objective approach for efficient reservoir management. J. Pet. Sci. Eng. 2021, 196, 107988. [Google Scholar] [CrossRef]
- Brouwer, D.; Jansen, J.; Intl, S.E. Dynamic Optimization of Waterflooding with Smart Wells Using Optimal Control Theory. SPE J. 2004, 9, 391–402. [Google Scholar] [CrossRef]
- Sarma, P.; Aziz, K.; Durlofsky, L.; Etc, C. Implementation of Adjoint Solution for Optimal Control of Smart Wells. In Proceedings of the SPE Reservoir Simulation Symposium, Houston, TX, USA, 31 January–2 February 2005. [Google Scholar]
- Zandvliet, M.J.; Handels, M.; Van Essen, G.M.; Brouwer, D.R.; Jansen, J.D. Adjoint-Based Well-Placement Optimization Under Production Constraints. SPE J. 2008, 13, 392–399. [Google Scholar] [CrossRef]
- Asadollahi, M.; Naevdal, G. Waterflooding Optimization Using Gradient Based Methods. In Proceedings of the SPE/EAGE Reservoir Characterization and Simulation Conference, Abu-Dhabi, United Arab Emirates, 19–21 October 2009. [Google Scholar]
- Dilib, F.A.; Jackson, M.D. Closed-Loop Feedback Control for Production Optimization of Intelligent Wells Under Uncertainty. SPE Prod. Oper. 2013, 28, 345–357. [Google Scholar] [CrossRef]
- Fonseca, R.M.; Leeuwenburgh, O.; Van Den Hof, P.M.J.; Jansen, J.D. Improving the ensemble-optimization method through covariance-matrix adaptation. SPE J. 2015, 20, 155–168. [Google Scholar] [CrossRef]
- Chen, B.; Reynolds, A.C. Optimal control of ICV’s and well operating conditions for the water-alternating-gas injection process. J. Pet. Sci. Eng. 2017, 149, 623–640. [Google Scholar] [CrossRef]
- Salehian, M.; Sefat, M.H.; Muradov, K. Development of a Multi-Solution Framework for Simultaneous Well Placement, Completion, and Control Optimization. In Proceedings of the SPE Europec featured at 82nd EAGE Conference and Exhibition, Amsterdam, The Netherlands, 18–21 October 2021. [Google Scholar]
- Sefat, M.H.; Muradov, K.M.; Davies, D.R. Optimal Field Development and Control Yields Accelerated, More Reliable, Production: A North Sea Case Study. In Proceedings of the SPE Intelligent Energy International Conference and Exhibition, Aberdeen, UK, 6–8 September 2016. [Google Scholar]
- Tympakianaki, A.; Koutsopoulos, H.N.; Jenelius, E. c-SPSA: Cluster-wise simultaneous perturbation stochastic approximation algorithm and its application to dynamic origin-destination matrix estimation. Transp. Res. Part. C Emerg. Technol. 2015, 55, 231–245. [Google Scholar] [CrossRef]
- Arouri, Y.; Sayyafzadeh, M. An accelerated gradient algorithm for well control optimization. J. Pet. Sci. Eng. 2020, 190, 106872. [Google Scholar] [CrossRef]
- Ahdeema, J.; Sefat, M.H.; Muradov, K. Hybrid Optimization Technique Allows Dynamic Completion Design and Control in Advanced Multilateral Wells with Multiple Types of Flow Control Devices. In Proceedings of the SPE Offshore Europe Conference and Exhibition, Aberdeen, UK, 5–8 September 2023. [Google Scholar]
- Mirzaei-Paiaman, A.; Santos, S.M.G.; Schiozer, D.J. Iterative sequential robust optimization of quantity and location of wells in field development under subsurface, operational and economic uncertainty. J. Pet. Sci. Eng. 2022, 218, 111005. [Google Scholar] [CrossRef]
- Yang, H.; Kim, J.; Choe, J. Field development optimization in mature oil reservoirs using a hybrid algorithm. J. Pet. Sci. Eng. 2017, 156, 41–50. [Google Scholar] [CrossRef]
- Fu, J.; Wen, X.H. Model-Based Multiobjective Optimization Methods for Efficient Management of Subsurface Flow. SPE Soc. Pet. Eng. J. 2017, 22, 1984–1998. [Google Scholar] [CrossRef]
- Ma, H.; Yu, G.; She, Y.; Gu, Y. A new hybrid production optimization algorithm for the combined CO2-cyclic solvent injection (CO2-CSI) and water/gas flooding in the post-CHOPS reservoirs. J. Pet. Sci. Eng. 2018, 170, 267–279. [Google Scholar] [CrossRef]
- Tozzo, E.; Cabral Seixas Costa, A.P.; Lins, I.D. A hybrid multi-objective genetic algorithm for scheduling heterogeneous workover rigs on onshore oil fields. J. Pet. Sci. Eng. 2020, 195, 107935. [Google Scholar] [CrossRef]
- Han, X.; Zhong, L.; Wang, X.; Liu, Y.; Wang, H. Well placement and control optimization of horizontal steamflooding wells using derivative-free algorithms. SPE Reserv. Eval. Eng. 2021, 24, 174–193. [Google Scholar] [CrossRef]
- CMG-IMEX, Computer Modelling Group Ltd.: Calgary, AB, Canada, 2022.
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Clerc, M.; Kennedy, J. The Particle Swarm-Explosion, Stability, and Convergence in a Multidimensional Complex Space. IEEE Trans. Evolut. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Kim, J.; Lee, K.; Choe, J. Efficient and robust optimization for well patterns using a PSO algorithm with a CNN-based proxy model. J. Pet. Sci. Eng. 2021, 207, 109088. [Google Scholar] [CrossRef]
- Spall, J.C. Multivariate Stochastic Approximation Using a Simultaneous Perturbation Gradient Approximation. IEEE Trans. Autom. Contr. 1992, 37, 332–341. [Google Scholar] [CrossRef]
- Spall, J.C. An Overview of the Simultaneous Perturbation Method for Efficient Optimization. Johns. Hopkins APL Tech. Design. 1998, 19, 482–492. [Google Scholar]
- Salehian, M.; Sefat, M.H.; Muradov, K. A Multisolution Optimization Framework for Well Placement and Control. SPE Reserv. Eval. Eng. 2021, 24, 923–939. [Google Scholar] [CrossRef]
- Samuel, J.S.; Muggeridge, A.H. Fast modelling of gas reservoir performance with proper orthogonal decomposition based autoencoder and radial basis function non-intrusive reduced order models. J. Pet. Sci. Eng. 2022, 211, 110011. [Google Scholar] [CrossRef]
- Yu, H.; Xie, T.; Paszczyñski, S.; Wilamowski, B.M. Advantages of Radial Basis Function Networks for Dynamic System Design. IEEE Trans. Ind. Electron. 2011, 58, 5438–5450. [Google Scholar] [CrossRef]
- Taunk, K.; De, S.; Verma, S.; Swetapadma, A. A Brief Review of Nearest Neighbor Algorithm for Learning and Classification. In Proceedings of the 2019 International Conference on Intelligent Computing and Control Systems, ICCS 2019, Madurai, India, 15–17 May 2019; pp. 1255–1260. [Google Scholar]
- Marquardt, D.W. An Algorithm for Least-Square Estimation of Nonlinear Parameters. J. Soc. Indust. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Razavi, S.; Gupta, H.V. A new framework for comprehensive, robust, and efficient global sensitivity analysis: 1. Theory. Water Resour. Res. 2016, 52, 423–439. [Google Scholar] [CrossRef]
- Morris, M.D. Factorial Sampling Plans for Preliminary Computational Experiments. Technometrics 1991, 33, 161–174. [Google Scholar] [CrossRef]
- Hamby, D.M. A Review of Techniques for Parameter Sensitivity Analysis of Environmental Models. Environ. Monit. Assess. 1994, 32, 135–154. [Google Scholar] [CrossRef] [PubMed]
- Sobol, I. Sensitivity Analysis for Nonlinear Model. Math. Model. Comput. Exp. 1993, 4, 407–414. [Google Scholar]
- Haghnegahdar, A.; Razavi, S. Insights into sensitivity analysis of Earth and environmental systems models: On the impact of parameter perturbation scale. Environ. Model. Softw. 2017, 95, 115–131. [Google Scholar] [CrossRef]
- Razavi, S.; Gupta, H.V. A multi-method Generalized Global Sensitivity Matrix approach to accounting for the dynamical nature of earth and environmental systems models. Environ. Model. Softw. 2019, 114, 1–11. [Google Scholar] [CrossRef]
- Do, N.C.; Razavi, S. Correlation Effects? A Major but Often Neglected Component in Sensitivity and Uncertainty Analysis. Water Resour. Res. 2020, 56, e2019WR025436. [Google Scholar] [CrossRef]
- Salehian, M.; Haghighat Sefat, M.; Muradov, K. Multi-solution well placement optimization using ensemble learning of surrogate models. J. Pet. Sci. Eng. 2022, 210, 110076. [Google Scholar] [CrossRef]
- Ma, Z.; Volkov, O.; Durlofsky, L.J. Multigroup strategy for well control optimization. J. Pet. Sci. Eng. 2022, 214, 110448. [Google Scholar] [CrossRef]
- Sefat, M.; Muradov, K.; Elsheikh, A. Proactive optimization of intelligent-well production using stochastic gradient-based algorithms. SPE Reserv. Eval. Eng. 2016, 19, 239–252. [Google Scholar] [CrossRef]
- Fonseca, R.M.; Della Rossa, E.; Emerick, A.A.; Hanea, R.G.; Jansen, J.D. Introduction to the special issue: Overview of OLYMPUS Optimization Benchmark Challenge. Comput. Geosci. 2020, 24, 1933–1941. [Google Scholar] [CrossRef]
- Holmes, J.; Barkve, T.; Hydro, A.S.A. Application of a Multisegment Well Model to Simulate Flow in Advanced Wells. In Proceedings of the SPE European Petroleum Conference, Hague, The Netherlands, 20–22 October 1998. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution-A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Humphries, T.D.; Haynes, R.D.; James, L.A. Simultaneous and sequential approaches to joint optimization of well placement and control. Comput. Geosci. 2014, 18, 433–448. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Field Units | SI Units |
|---|---|---|
| ) | 60 USD/STB | 377.39 USD/m3 |
| ) | 6 USD/STB | 37.74 USD/m3 |
| ) | 3 USD/STB | 18.87 USD/m3 |
| ) | 12%/year | 12%/year |
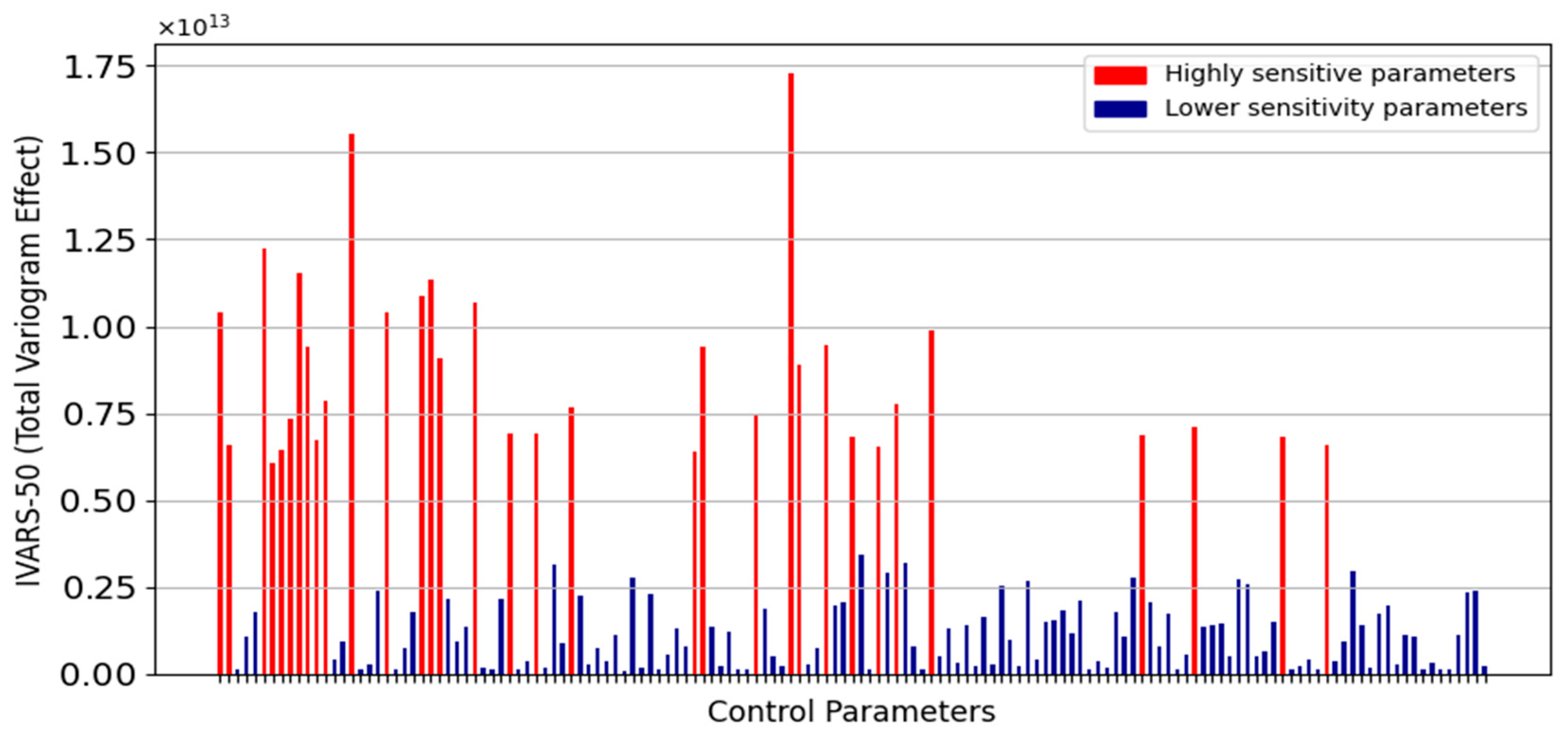
| High Impact Group (33 Highly Sensitive Parameters) Ranked Based on Their Appearance in the IVARSs Plot in Figure 9 from Left to Right |
|---|
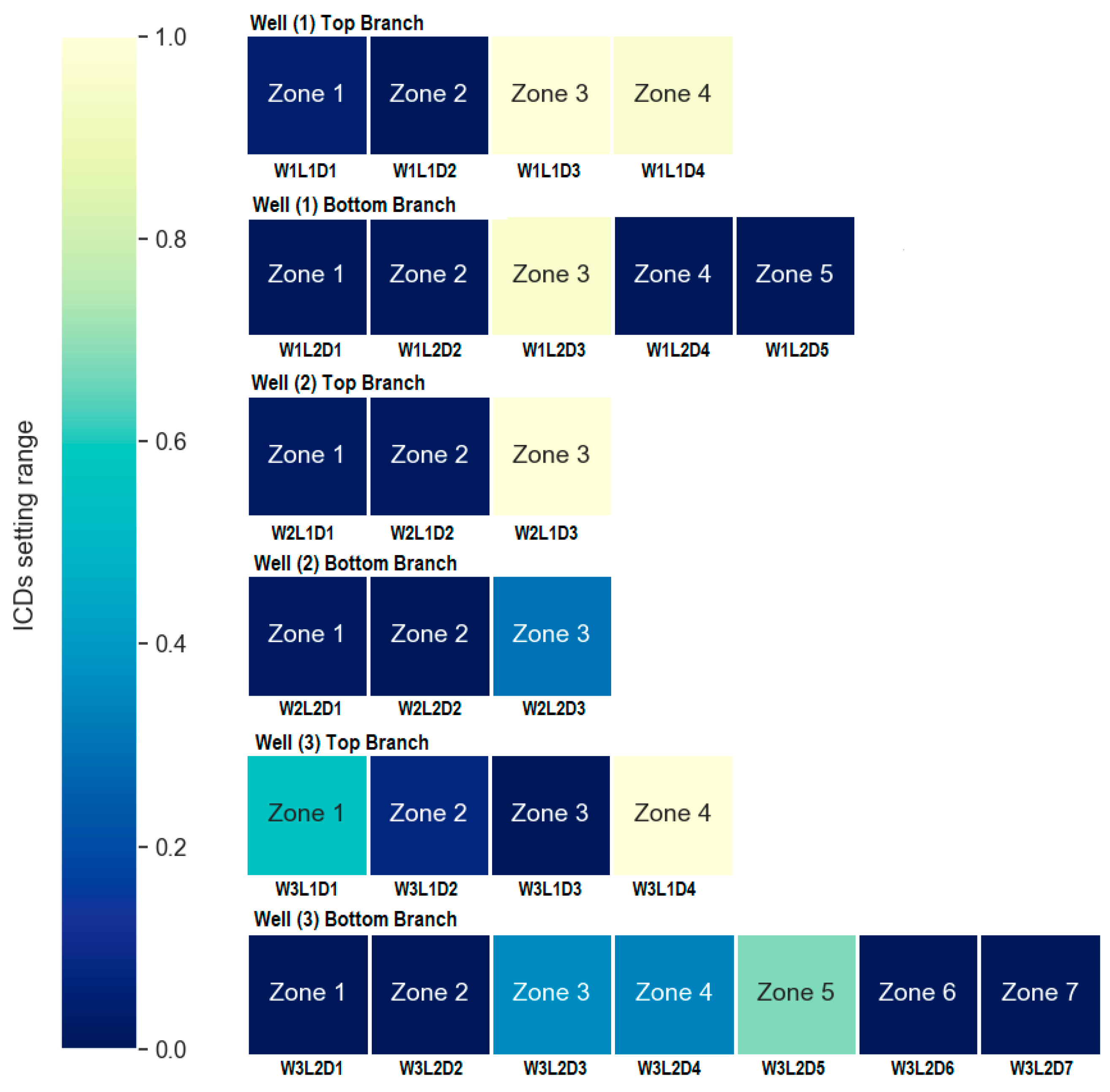
| W1L1D2, W1L1D3, W1L2D3, W1L2D4, W1L2D5, W2L1D1, W2L1D2, W2L1D3, W2L2D1, W2L2D2, W3L1D2, W3L2D2, W3L2D6, W3L2D7, W1V1T01, W1V1T03, W1V1T05, W1V2T06, W1V2T08, W1V2T15, W1V1T16, W1V1T19, W2V1T01, W2V2T01, W2V1T03, W2V2T04, W2V1T06, W2V1T07, W2V1T09, W3V1T01, W3V1T04, W3V1T09 and W3V2T11 |
| Algorithm/Technique | Cumulative Oil (m3) × 106 | Cumulative Water (m3) × 106 | NPV (USD) × 109 | NPV Increase Compared to the Base Case |
|---|---|---|---|---|
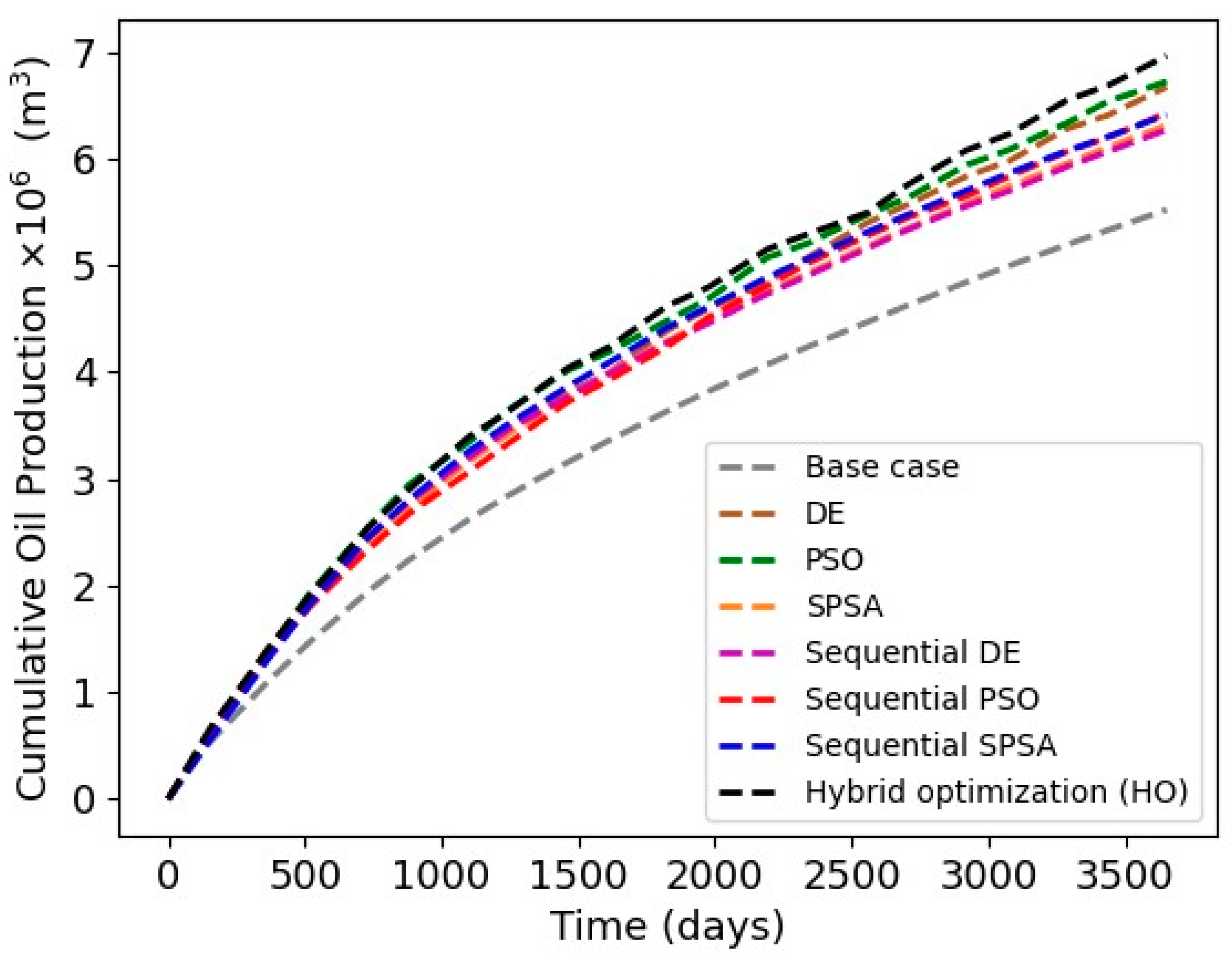
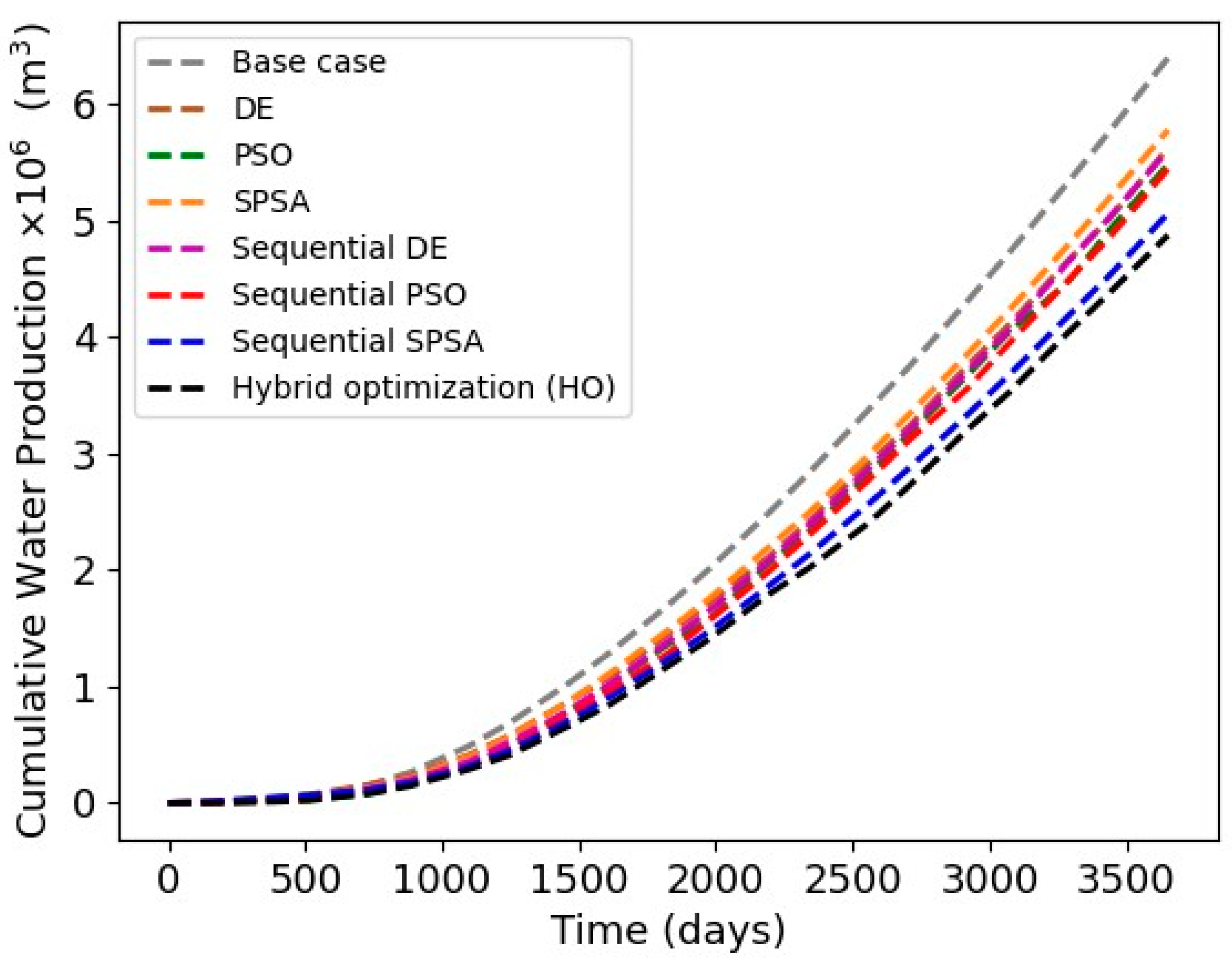
| Base case | 5.52 | 6.40 | 1.536 | - |
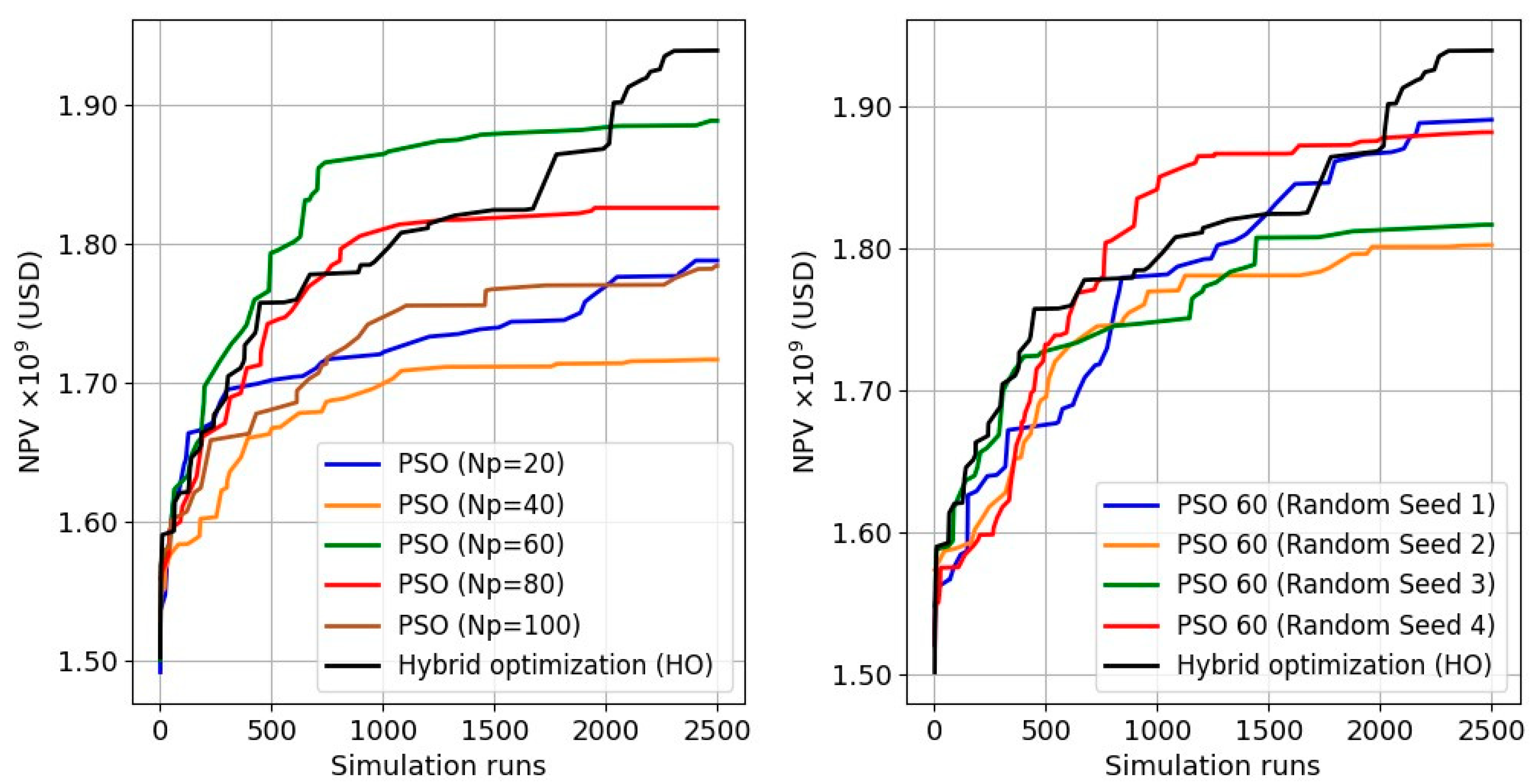
| Standard PSO | 6.72 | 5.47 | 1.890 | 23.04% |
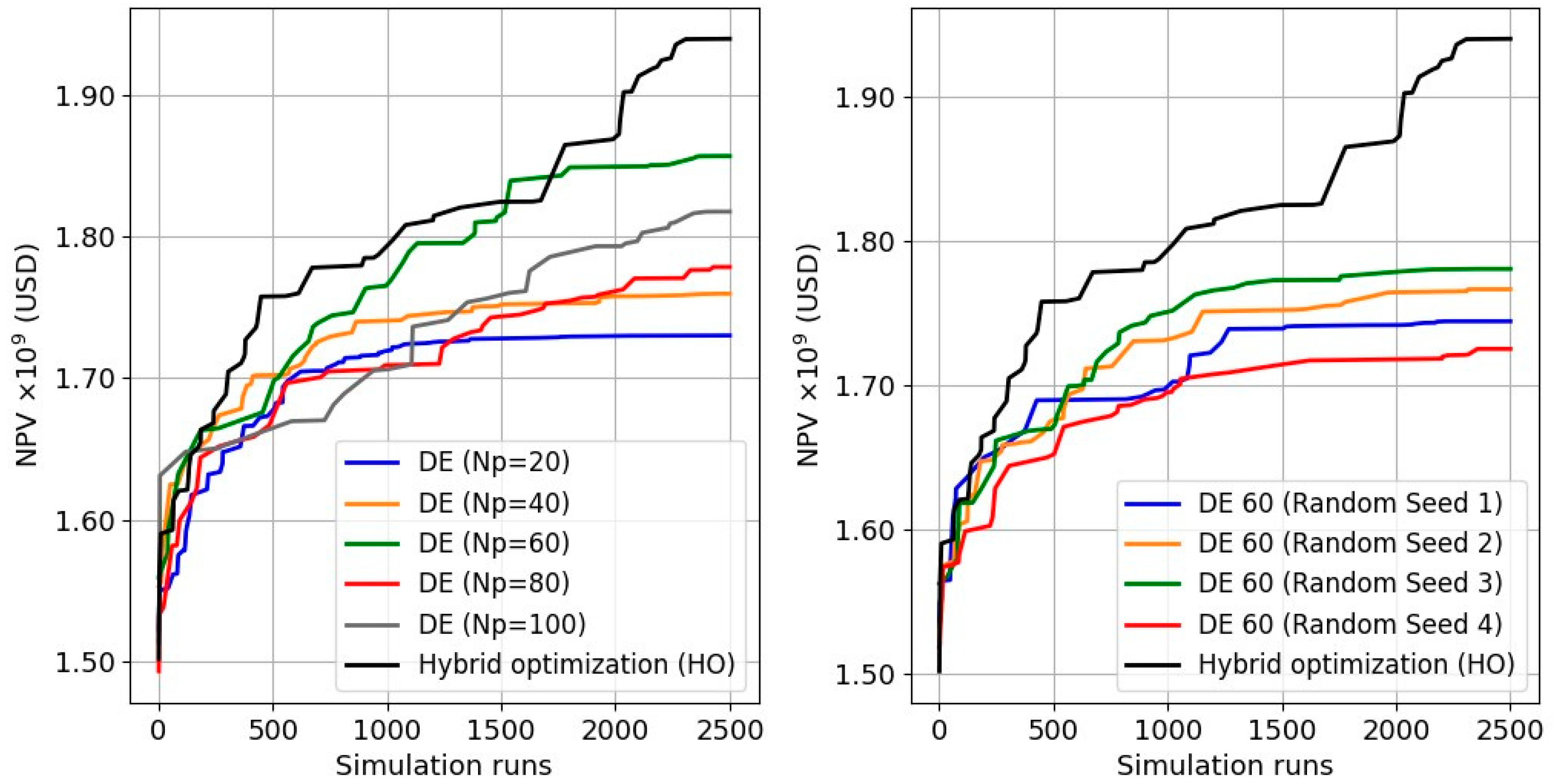
| Standard DE | 6.67 | 5.62 | 1.857 | 20.90% |
| Standard SPSA | 6.31 | 5.77 | 1.777 | 15.70% |
| Sequential PSO | 6.43 | 5.44 | 1.800 | 17.19% |
| Sequential DE | 6.27 | 5.60 | 1.771 | 15.30% |
| Sequential SPSA | 6.45 | 5.00 | 1.816 | 18.23% |
| Hybrid optimization (HO) | 6.96 | 4.87 | 1.941 | 26.37% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahdeema, J.; Haghighat Sefat, M.; Muradov, K. Hybrid Framework for Enhanced Dynamic Optimization of Intelligent Completion Design in Multilateral Wells with Multiple Types of Flow Control Devices. Energies 2023, 16, 7189. https://doi.org/10.3390/en16207189
Ahdeema J, Haghighat Sefat M, Muradov K. Hybrid Framework for Enhanced Dynamic Optimization of Intelligent Completion Design in Multilateral Wells with Multiple Types of Flow Control Devices. Energies. 2023; 16(20):7189. https://doi.org/10.3390/en16207189
Chicago/Turabian StyleAhdeema, Jamal, Morteza Haghighat Sefat, and Khafiz Muradov. 2023. "Hybrid Framework for Enhanced Dynamic Optimization of Intelligent Completion Design in Multilateral Wells with Multiple Types of Flow Control Devices" Energies 16, no. 20: 7189. https://doi.org/10.3390/en16207189
APA StyleAhdeema, J., Haghighat Sefat, M., & Muradov, K. (2023). Hybrid Framework for Enhanced Dynamic Optimization of Intelligent Completion Design in Multilateral Wells with Multiple Types of Flow Control Devices. Energies, 16(20), 7189. https://doi.org/10.3390/en16207189