
Dual-Motor Dual-Source High Performance EV: A Comprehensive Review



Abstract
:1. Introduction
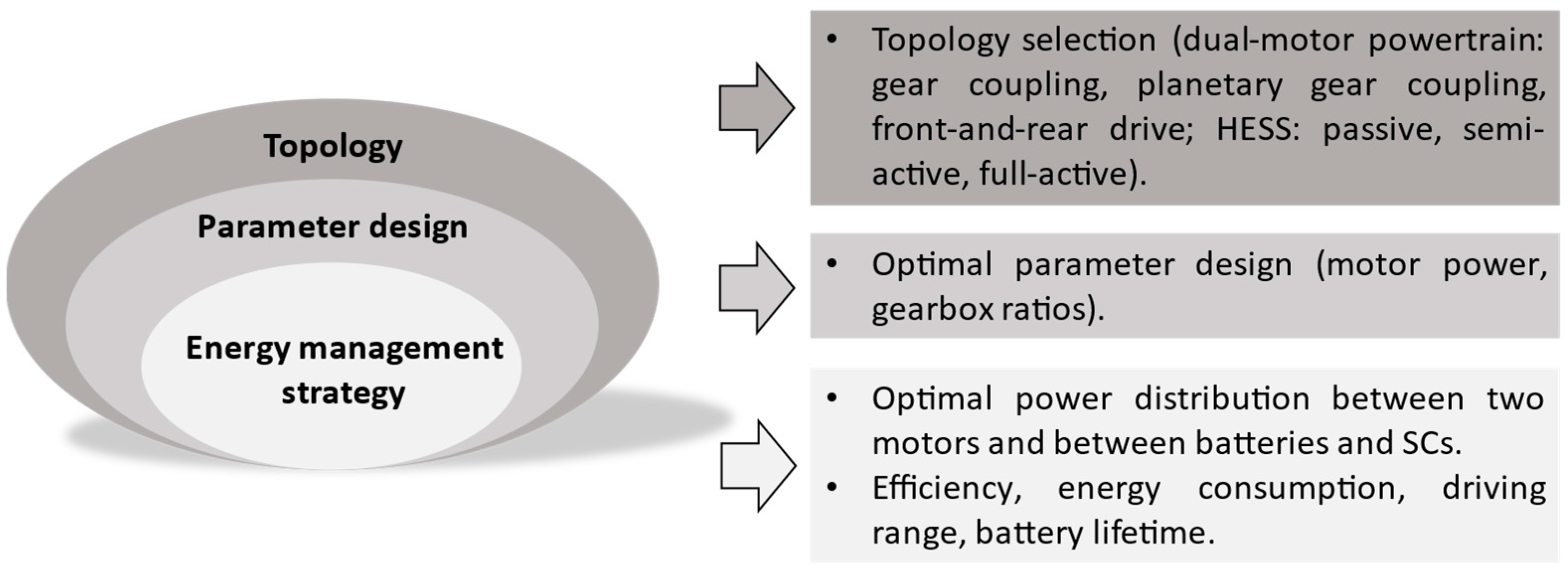
2. Configuration
2.1. Dual-Motor Coupling Powertrain
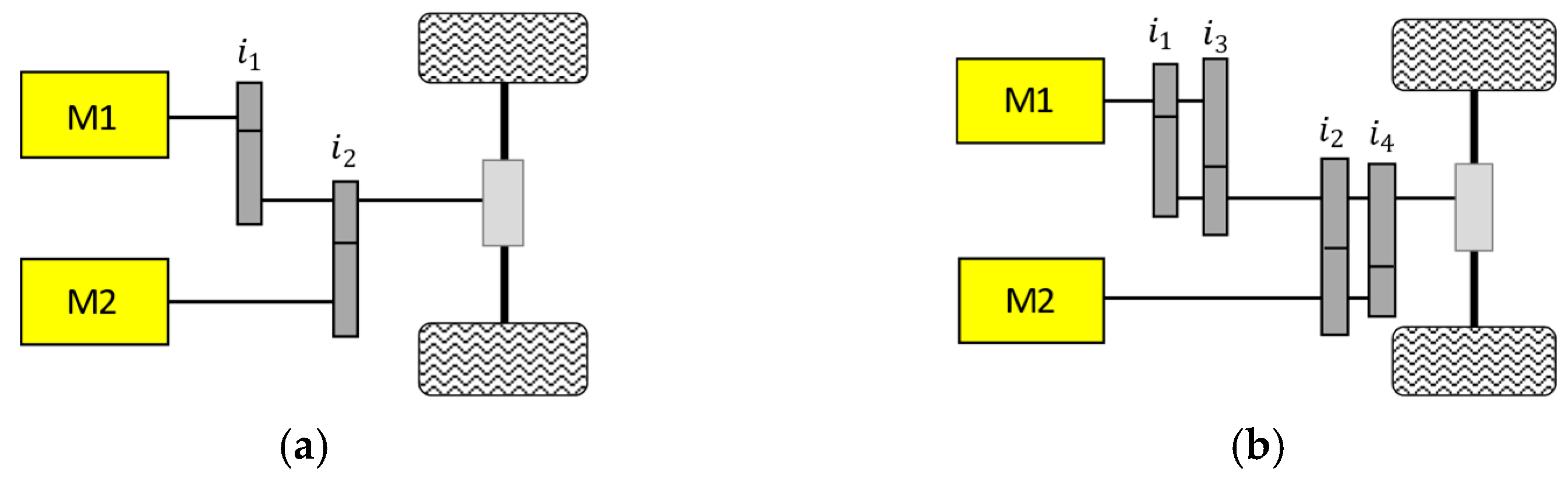
2.1.1. Two Motors Coupled through Gear Pairs
2.1.2. Two Motors Coupled via a Planetary Gear
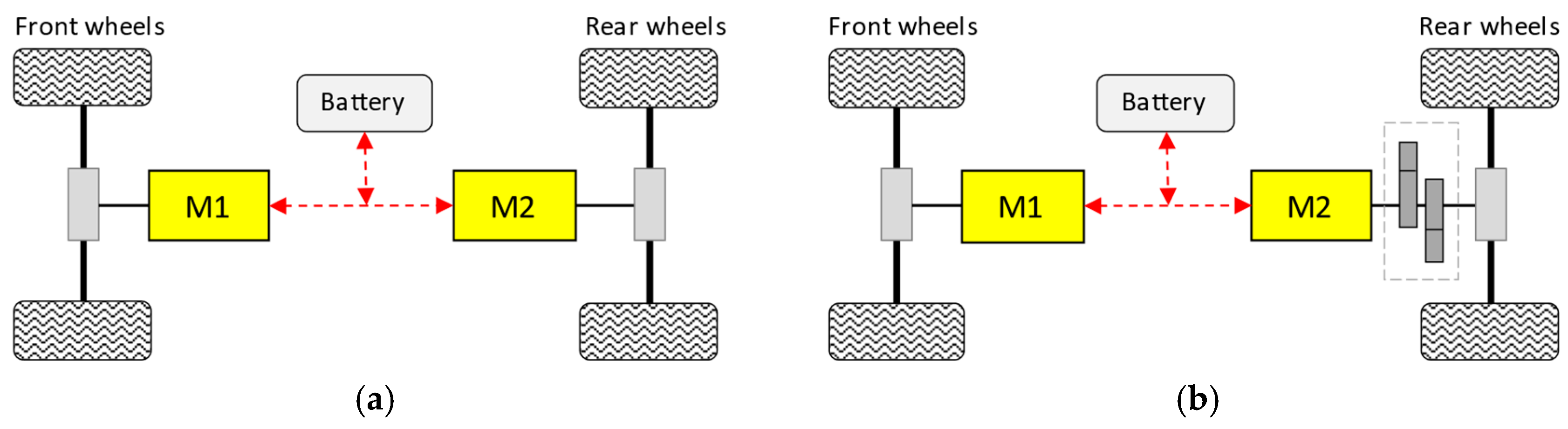
2.1.3. Front-and-Rear Driven Dual Motor Coupling Powertrain
2.1.4. Comparison
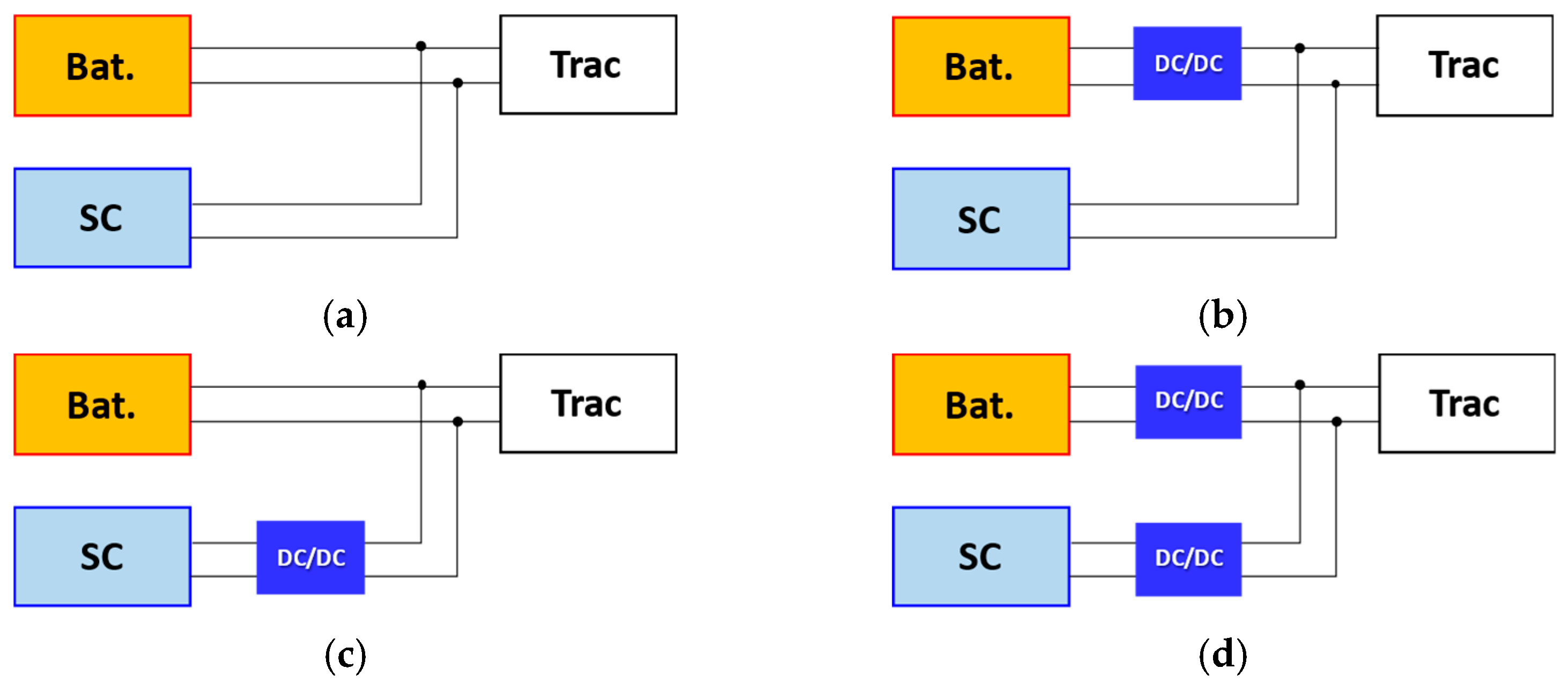
2.2. Battery/SC HESSs
2.2.1. Passive Topology
2.2.2. Semi-Active Topology
- Battery semi-active topology
- SC semi-active topology
2.2.3. Fully Active Topology
2.2.4. Comparison
3. Parameter Design of the Dual-Motor Coupling Powertrain
3.1. Empirical-Based Method
3.2. Optimization-Based Method
4. Energy Management Strategy
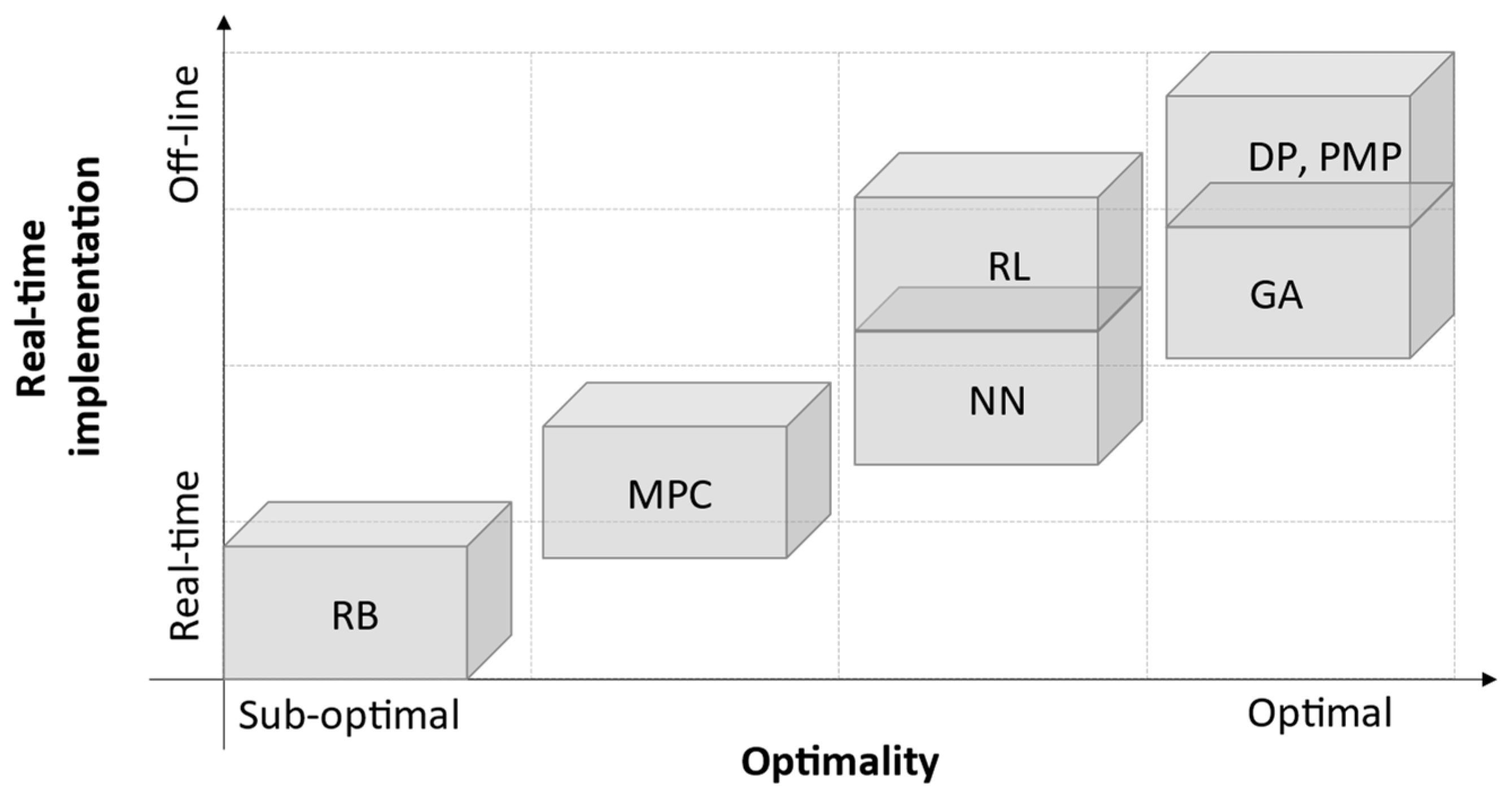
4.1. Rule-Based Strategy
4.2. Optimization-Based Strategy
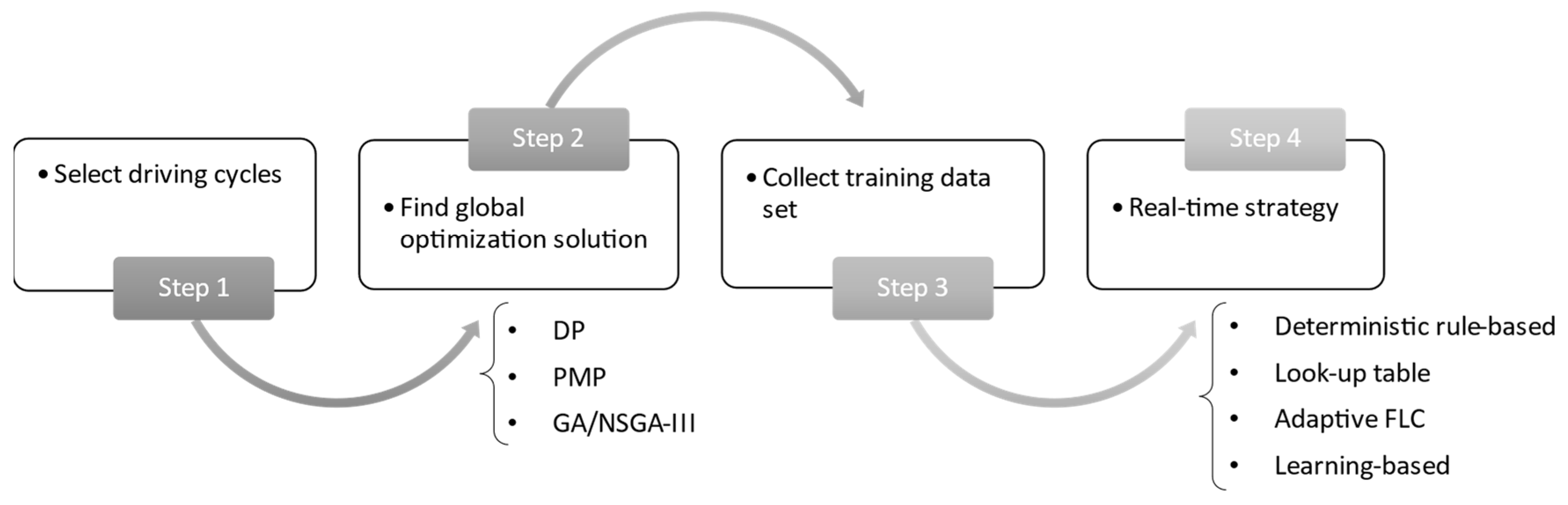
4.2.1. Offline Global Optimization Strategy
- Dynamic programming (DP).
- Pontryagin’s Minimum Principle (PMP).
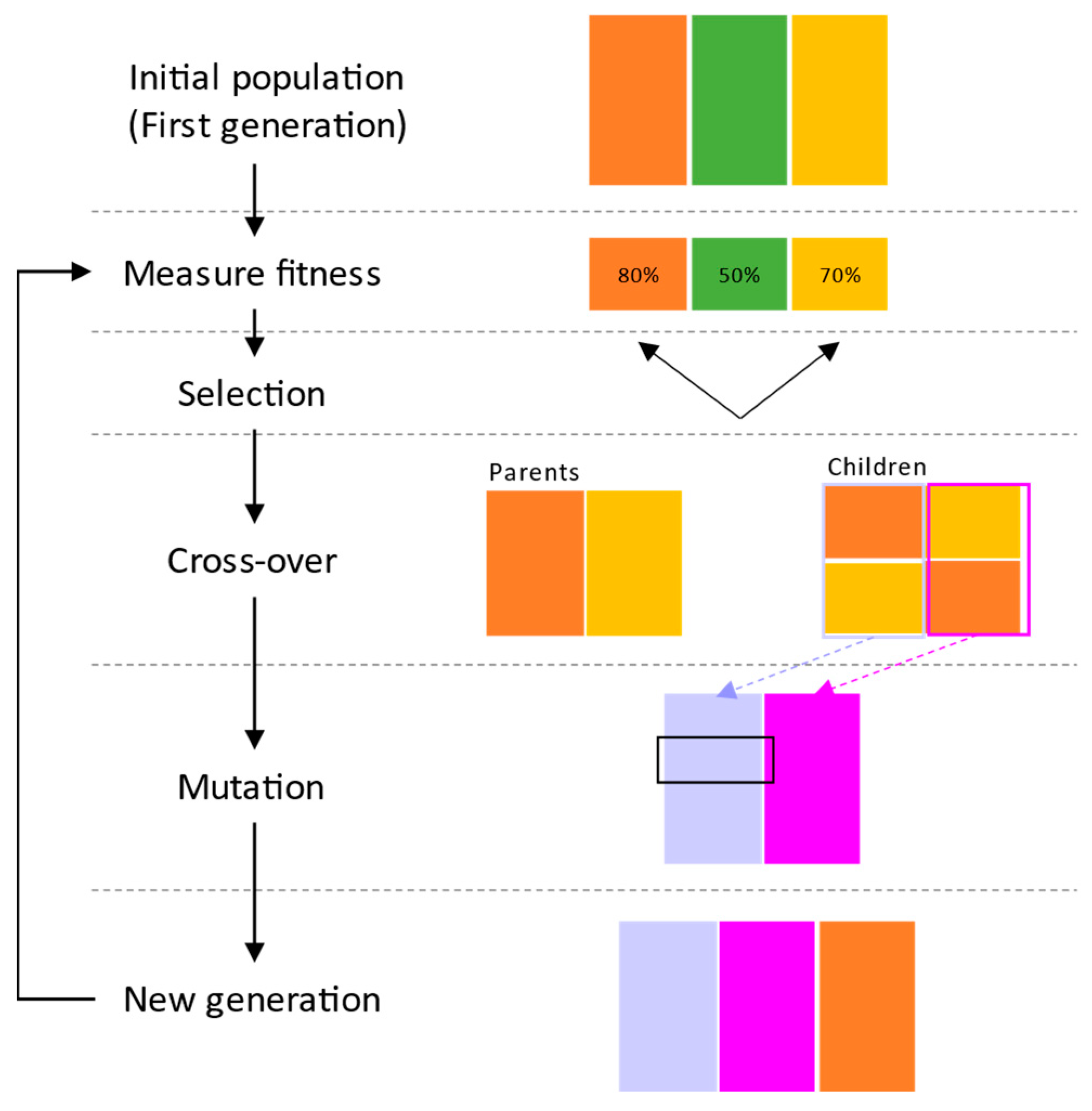
- Genetic Algorithm (GA).
4.2.2. Online Optimization Strategy
- Model Predictive Control (MPC).
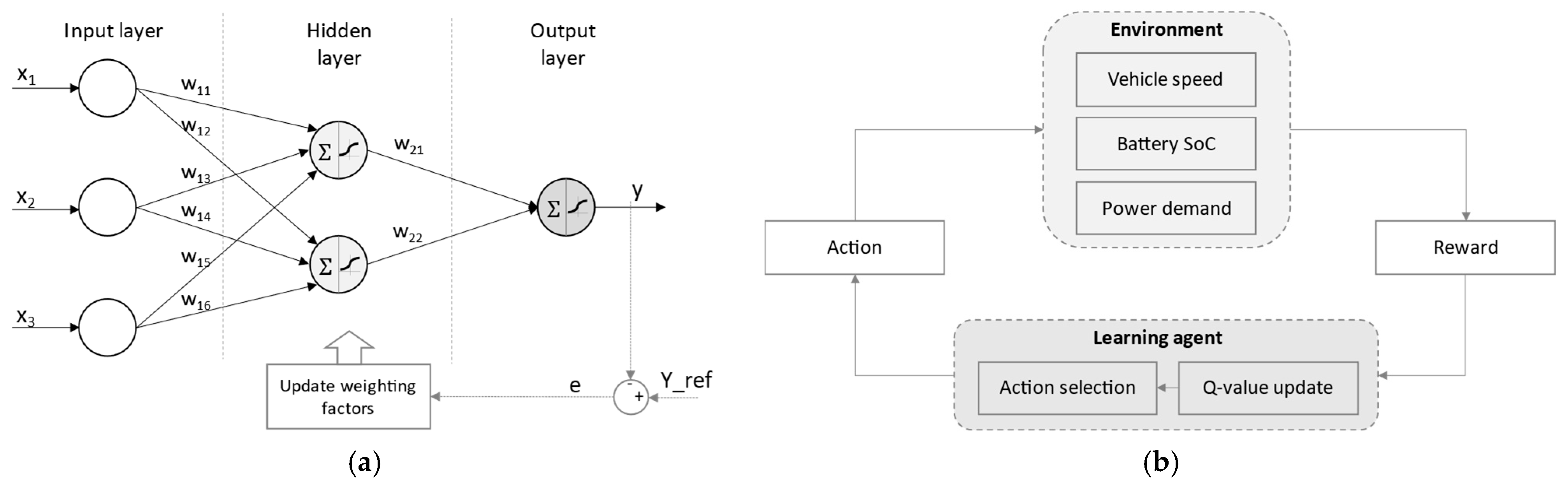
4.2.3. Learning-Based Strategy
4.2.4. Optimization of Rule-Based Strategy
4.2.5. Other Strategies
5. Challenges and Research Gaps
5.1. The Selection of Dual-Motor Coupling Configuration
5.2. Parameter Design Optimization
5.3. Optimal Real-Time EMS
5.4. Dual-Motor Powertrain Equipped with Battery/SC HESS for Off-Road EVs
5.5. Multi-Agent System
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- EV Volumes. 2022. Available online: https://www.ev-volumes.com/ (accessed on 10 September 2023).
- IEA. 2020. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 10 September 2023).
- Wang, Z.; Zhou, J.; Rizzoni, G. A review of architectures and control strategies of dual-motor coupling powertrain systems for battery electric vehicles. Renew. Sustain. Energy Rev. 2022, 162, 112455. [Google Scholar] [CrossRef]
- Kouchachvili, L.; Yaïci, W.; Entchev, E. Hybrid battery/supercapacitor energy storage system for the electric vehicles. J. Power Sources 2018, 374, 237–248. [Google Scholar] [CrossRef]
- Zimmermann, T.; Keil, P.; Hofmann, M.; Horsche, M.F.; Pichlmaier, S.; Jossen, A. Review of system topologies for hybrid electrical energy storage systems. J. Energy Storage 2016, 8, 78–90. [Google Scholar] [CrossRef]
- Rezaei, H.; Abdollahi, S.E.; Abdollahi, S.; Filizadeh, S. Energy managment strategies of battery-ultracapacitor hybrid storage systems for electric vehicles: Review, challenges, and future trends. J. Energy Storage 2022, 53, 105045. [Google Scholar] [CrossRef]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor—A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Silvas, E.; Hofman, T.; Murgovski, N.; Etman, L.P.; Steinbuch, M. Review of Optimization Strategies for System-Level Design in Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 66, 57–70. [Google Scholar] [CrossRef]
- Kwon, K.; Seo, M.; Min, S. Efficient multi-objective optimization of gear ratios and motor torque distribution for electric vehicles with two-motor and two-speed powertrain system. Appl. Energy 2020, 259, 114190. [Google Scholar] [CrossRef]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Gao, Y.; Ehsani, M. A torque and speed coupling hybrid drivetrain—Architecture, control, and simulation. IEEE Trans. Power Electron. 2006, 21, 741–748. [Google Scholar]
- Nguyen, C.T.; Walker, P.D.; Zhou, S.; Zhang, N. Optimal sizing and energy management of an electric vehicle powertrain equipped with two motors and multi-gear ratios. Mech. Mach. Theory 2022, 167, 104513. [Google Scholar] [CrossRef]
- Lin, X.; Li, Y.; Zhang, G. Bi-objective optimization strategy of energy consumption and shift shock based driving cycle-aware bias coefficients for a novel dual-motor electric vehicle. Energy 2022, 249, 123596. [Google Scholar] [CrossRef]
- Ge, S.; Hou, S.; Yao, M. Electromechanical Coupling Dynamic Characteristics of the Dual-Motor Electric Drive System of Hybrid Electric Vehicles. Energies 2023, 16, 3190. [Google Scholar] [CrossRef]
- Zhao, M.; Shi, J.; Lin, C.; Zhang, J. Application-oriented optimal shift schedule extraction for a dual-motor electric bus with automated manual transmission. Energies 2018, 11, 325. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, S.; Han, G.; Liu, H. Power management comparison for a dual-motor-propulsion system used in a battery electric bus. IEEE Trans. Ind. Electron. 2017, 64, 3873–3882. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Zhang, C.; Sun, F. An optimal structure selection and parameter design approach for a dual-motor-driven system used in an electric bus. Energy 2016, 96, 437–448. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Zhang, C. Pontryagin’s Minimum Principle-based power management of a dual-motor-driven electric bus. Appl. Energy 2015, 159, 370–380. [Google Scholar] [CrossRef]
- Hu, M.; Chen, S.; Zeng, J. Control Strategy for the Mode Switch of a Novel Dual-Motor Coupling Powertrain. IEEE Trans. Veh. Technol. 2018, 67, 2001–2013. [Google Scholar] [CrossRef]
- Hu, M.; Zeng, J.; Xu, S.; Fu, C.; Qin, D. Efficiency Study of a Dual-Motor Coupling EV Powertrain. IEEE Trans. Veh. Technol. 2015, 64, 2252–2260. [Google Scholar] [CrossRef]
- Lin, X.; Lin, Z.; Wei, S. Multi-objective optimized driving strategy of dual-motor EVs using NSGA-II as a case study and comparison of various intelligent algorithms. Appl. Soft Comput. 2021, 111, 107684. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y.; Li, H.; Gao, J.; Swen, A.; Wen, G. Optimal sizing and energy management of a novel dual-motor powertrain for electric vehicles. Energy 2023, 275, 127315. [Google Scholar] [CrossRef]
- Yu, X.; Lin, C.; Tian, Y.; Zhao, M.; Liu, H.; Xie, P.; Zhang, J. Real-time and hierarchical energy management-control framework for electric vehicles with dual-motor powertrain system. Energy 2023, 272, 127112. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, R.; Lin, C.; Zhou, H.; Shi, J. Stochastic Model Predictive Control for Dual-Motor Battery Electric Bus Based on Signed Markov Chain Monte Carlo Method. IEEE Access 2020, 8, 120785–120797. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Zhang, N.; Wang, B.; Tian, Y. The dynamic and economic performance study of a new Simpson planetary gearset based dual motor powertrain for electric vehicles. Mech. Mach. Theory 2022, 167, 104579. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Zhang, N.; Wang, B. Energy efficiency optimization of Simpson planetary gearset based dual-motor powertrains for electric vehicles. Energy 2022, 259, 124908. [Google Scholar] [CrossRef]
- Tan, S.; Yang, J.; Zhao, X.; Yang, W.; Yu, W.; Khajepour, A. Power Distribution Strategy Development and Optimization of an Integrated Dual-Motor Transmission for Electric Dump Truck. IEEE Trans. Transp. Electrif. 2021, 7, 1964–1975. [Google Scholar] [CrossRef]
- Guo, L.; Yang, B.; Ye, J. Predictive Energy Management for Dual-Motor BEVs Considering Temperature-Dependant Traction Inverter Loss. IEEE Trans. Transp. Electrif. 2021, 8, 1501–1515. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, J. Torque distribution strategy for a front- and rear-wheel-driven electric vehicle. IEEE Trans. Veh. Technol. 2012, 61, 3365–3374. [Google Scholar] [CrossRef]
- He, Q.; Yang, Y.; Luo, C.; Zhai, J.; Luo, R.; Fu, C. Energy recovery strategy optimization of dual-motor drive electric vehicle based on braking safety and efficient recovery. Energy 2022, 248, 123543. [Google Scholar] [CrossRef]
- Kim, H.W.; Amarnathvarma, A.; Kim, E.; Hwang, M.H.; Kim, K.; Kim, H.; Choi, I.; Cha, H.R. A Novel Torque Matching Strategy for Dual Motor-Based All-Wheel-Driving Electric Vehicles. Energies 2022, 15, 2717. [Google Scholar] [CrossRef]
- Cui, H.; Ruan, J.; Wu, C.; Zhang, K.; Li, T. Advanced deep deterministic policy gradient based energy management strategy design for dual-motor four-wheel-drive electric vehicle. Mech. Mach. Theory 2023, 179, 105119. [Google Scholar] [CrossRef]
- Hu, X.; Li, Y.; Lv, C.; Liu, Y. Optimal Energy Management and Sizing of a Dual Motor-Driven Electric Powertrain. IEEE Trans. Power Electron. 2019, 34, 7489–7501. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, C.; Guo, D.; Yang, F.; Zhang, Z.; Zhao, M. Drive-cycle Based Configuration Design and Energy Efficiency Analysis of Dual-Motor 4WD System with Two-speed Transmission for Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 1. [Google Scholar] [CrossRef]
- Ruan, J.; Wu, C.; Cui, H.; Li, W.; Sauer, D.U. Delayed Deep Deterministic Policy Gradient-based Energy Management Strategy for Overall Energy Consumption Optimization of Dual Motor Electrified Powertrain. IEEE Trans. Veh. Technol. 2023, 72, 11415–11427. [Google Scholar] [CrossRef]
- De Pinto, S.; Camocardi, P.; Sorniotti, A.; Gruber, P.; Perlo, P.; Viotto, F. Torque-Fill Control and Energy Management for a Four-Wheel-Drive Electric Vehicle Layout With Two-Speed Transmissions. IEEE Trans. Ind. Appl. 2017, 53, 447–458. [Google Scholar] [CrossRef]
- Tesla Model S. Available online: https://www.tesla.com/en_AE/models (accessed on 10 September 2023).
- 2025 Audi Q4 E-Tron EV Updates Suggest Range Boost, Sportier Tuning. Available online: https://www.greencarreports.com/news/1140889_2025-audi-q4-e-tron-ev-updates-suggest-range-boost-sportier-tuning (accessed on 10 September 2023).
- Nio’s ES6 Electric SUV Has a 510-km Range. Available online: https://driving.ca/auto-news/news/nios-es6-electric-suv-has-a-510-km-range-starts-at-70000 (accessed on 10 September 2023).
- Jaguar Reveals Improved 2021 I-PACE: Faster AC Charging, but No Increase in Range. Available online: https://insideevs.com/news/430211/2021-jaguar-i-pace-improved/ (accessed on 10 September 2023).
- 2024 Rivian R1S/R1T Dual Motor Review: Towing, Off-Roading, and Tech. Available online: https://www.motortrend.com/reviews/2024-rivian-r1s-r1t-dual-motor-first-drive-review/ (accessed on 10 September 2023).
- 2021 Ford Mustang Mach-E GT Performance Edition First Test: Yes, It’s a Mustang. Available online: https://www.motortrend.com/reviews/2021-ford-mustang-mach-e-gt-performance-edition-first-test-review/ (accessed on 10 September 2023).
- Nguyen, B.H.; German, R.; Trovão, J.P.F.; Bouscayrol, A. Real-time energy management of battery/supercapacitor electric vehicles based on an adaptation of pontryagin’s minimum principle. IEEE Trans. Veh. Technol. 2019, 68, 203–212. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, R.; Lin, C.; Shen, W. Model predictive control based real-time energy management for hybrid energy storage system. CSEE J. Power Energy Syst. 2021, 7, 862–874. [Google Scholar]
- Liu, R.; Wang, C.; Tang, A.; Zhang, Y.; Yu, Q. A twin delayed deep deterministic policy gradient-based energy management strategy for a battery-ultracapacitor electric vehicle considering driving condition recognition with learning vector quantization neural network. J. Energy Storage 2023, 71, 108147. [Google Scholar] [CrossRef]
- Wang, C.; Liu, R.; Tang, A. Energy management strategy of hybrid energy storage system for electric vehicles based on genetic algorithm optimization and temperature effect. J. Energy Storage 2022, 51, 104314. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Cao, J. Battery durability and longevity based power management for plug-in hybrid electric vehicle with hybrid energy storage system. Appl. Energy 2016, 179, 316–328. [Google Scholar] [CrossRef]
- Xiong, R.; Duan, Y.; Cao, J.; Yu, Q. Battery and ultracapacitor in-the-loop approach to validate a real-time power management method for an all-climate electric vehicle. Appl. Energy 2018, 217, 153–165. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement learning-based real-time power management for hybrid energy storage system in the plug-in hybrid electric vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Xiao, G.; Chen, Q.; Xiao, P.; Zhang, L.; Rong, Q. Multiobjective Optimization for a Li-ion Battery and SuperCapacitor Hybrid Energy Storage Electric Vehicle. Energies 2022, 15, 2821. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, X.; Wang, Z.; Sun, F.; Deng, J.; Dorrell, D.G. Multiobjective Optimal Sizing of Hybrid Energy Storage System for Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 1027–1035. [Google Scholar] [CrossRef]
- Shen, J.; Khaligh, A. A supervisory energy management control strategy in a battery/ultracapacitor hybrid energy storage system. IEEE Trans. Transp. Electrif. 2015, 1, 223–231. [Google Scholar] [CrossRef]
- Zhu, T.; Wills, R.G.; Lot, R.; Ruan, H.; Jiang, Z. Adaptive energy management of a battery-supercapacitor energy storage system for electric vehicles based on flexible perception and neural network fitting. Appl. Energy 2021, 292, 116932. [Google Scholar] [CrossRef]
- Eldeeb, H.H.; Elsayed, A.T.; Lashway, C.R.; Mohammed, O. Hybrid Energy Storage Sizing and Power Splitting Optimization for Plug-In Electric Vehicles. IEEE Trans. Ind. Appl. 2019, 55, 2252–2262. [Google Scholar] [CrossRef]
- Zheng, C.; Li, W.; Liang, Q. An Energy Management Strategy of Hybrid Energy Storage Systems for Electric Vehicle Applications. IEEE Trans. Sustain. Energy 2018, 9, 1880–1888. [Google Scholar] [CrossRef]
- Shen, J.; Khaligh, A. Design and Real-Time Controller Implementation for a Battery-Ultracapacitor Hybrid Energy Storage System. IEEE Trans. Ind. Inform. 2016, 12, 1910–1918. [Google Scholar] [CrossRef]
- Wilberforce, T.; Anser, A.; Swamy, J.A.; Opoku, R. An investigation into hybrid energy storage system control and power distribution for hybrid electric vehicles. Energy 2023, 279, 127804. [Google Scholar] [CrossRef]
- Wu, Y.; Huang, Z.; Zheng, Y.; Liu, Y.; Li, H.; Che, Y.; Peg, J.; Teodorescu, R. Spatial–temporal data-driven full driving cycle prediction for optimal energy management of battery/supercapacitor electric vehicles. Energy Convers. Manag. 2023, 277, 116619. [Google Scholar] [CrossRef]
- Robayo, M.; Mueller, M.; Sharkh, S.; Abusara, M. Assessment of supercapacitor performance in a hybrid energy storage system with an EMS based on the discrete wavelet transform. J. Energy Storage 2023, 57, 106200. [Google Scholar] [CrossRef]
- Hu, L.; Tian, Q.; Zou, C.; Huang, J.; Ye, Y.; Wu, X. A study on energy distribution strategy of electric vehicle hybrid energy storage system considering driving style based on real urban driving data. Renew. Sustain. Energy Rev. 2022, 162, 112416. [Google Scholar] [CrossRef]
- Asensio, E.M.; Magallán, G.A.; Pérez, L.; De Angelo, C.H. Short-term power demand prediction for energy management of an electric vehicle based on batteries and ultracapacitors. Energy 2022, 247, 123430. [Google Scholar] [CrossRef]
- Gao, R.; Tao, J.; Zhang, J.; Ma, L.; Xu, M. NSGA-III-SD based Fuzzy energy management system optimization for lithium battery/supercapacitor HEV. Appl. Soft Comput. 2023, 142, 110280. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Zhang, X.; Wang, J.; Shu, H.; Li, S.; He, T.; Lan, C.; Yu, T. Applications of battery/supercapacitor hybrid energy storage systems for electric vehicles using perturbation observer based robust control. J. Power Sources 2020, 448, 227444. [Google Scholar] [CrossRef]
- Chen, F.; Ge, C.; Tang, D.; Ding, S.; Gong, X. Energy management and nonlinear control strategy of hybrid energy storage system for electric vehicle. Energy Rep. 2022, 8, 11161–11173. [Google Scholar] [CrossRef]
- Wu, Y.; Huang, Z.; Liao, H.; Chen, B.; Zhang, X.; Zhou, Y.; Liu, Y.; Li, H.; Peng, J. Adaptive power allocation using artificial potential field with compensator for hybrid energy storage systems in electric vehicles. Appl. Energy 2020, 257, 113983. [Google Scholar] [CrossRef]
- Trovão JP, F.; Roux, M.A.; Ménard, É.; Dubois, M.R. Energy- and power-split management of dual energy storage system for a three-wheel electric vehicle. IEEE Trans. Veh. Technol. 2017, 66, 5540–5550. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, W.; Li, G. Stochastic Control of Predictive Power Management for Battery/Supercapacitor Hybrid Energy Storage Systems of Electric Vehicles. IEEE Trans. Ind. Inform. 2018, 14, 3023–3030. [Google Scholar] [CrossRef]
- Ruan, J.; Walker, P.; Zhang, N. A comparative study energy consumption and costs of battery electric vehicle transmissions. Appl. Energy 2016, 165, 119–134. [Google Scholar] [CrossRef]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50–51, 615–631. [Google Scholar] [CrossRef]
- Rimpas, D.; Kaminaris, S.D.; Aldarraji, I.; Piromalis, D.; Vokas, G.; Papageorgas, P.G.; Tsaramirsis, G. Energy management and storage systems on electric vehicles: A comprehensive review. Mater. Today Proc. 2022, 61, 813–819. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, L.; Jia, M.; Zhang, Y.; Pang, T. Optimization and model validation of operation control strategies for a novel dual-motor coupling-propulsion pure electric vehicle. Energies 2018, 11, 754. [Google Scholar] [CrossRef]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. A robust energy management strategy for EVs with dual input power-split transmission. Mech. Syst. Signal Process. 2018, 111, 442–455. [Google Scholar] [CrossRef]
- Wu, J.; Wang, B.; Hong, X. Driving Torque Control of Dual-Motor Powertrain for Electric Vehicles. Actuators 2022, 11, 320. [Google Scholar] [CrossRef]
- Ruan, J.; Song, Q. A novel dual-motor two-speed direct drive battery electric vehicle drivetrain. IEEE Access 2019, 7, 54330–54342. [Google Scholar] [CrossRef]
- Azeem, M.K.; Armghan, H.; Ahmad, I.; Hassan, M. Multistage adaptive nonlinear control of battery-ultracapacitor based plugin hybrid electric vehicles. J. Energy Storage 2020, 32, 101813. [Google Scholar] [CrossRef]
- Hu, J.; Liu, D.; Du, C.; Yan, F.; Lv, C. Intelligent energy management strategy of hybrid energy storage system for electric vehicle based on driving pattern recognition. Energy 2020, 198, 117298. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy management strategies comparison for electric vehicles with hybrid energy storage system. Appl. Energy 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Castaings, A.; Lhomme, W.; Trigui, R.; Bouscayrol, A. Comparison of energy management strategies of a battery/supercapacitors system for electric vehicle under real-time constraints. Appl. Energy 2016, 163, 190–200. [Google Scholar] [CrossRef]
- Asensio, E.M.; Magallan, G.A.; De Angelo, C.H.; Serra, F.M. Energy Management on Battery/Ultracapacitor Hybrid Energy Storage System based on Adjustable Bandwidth Filter and Sliding-mode Control. J. Energy Storage 2020, 30, 101569. [Google Scholar] [CrossRef]
- Sun, L.; Feng, K.; Chapman, C.; Zhang, N. An adaptive power-split strategy for battery-supercapacitor powertrain-design, simulation, and experiment. IEEE Trans. Power Electron. 2017, 32, 9364–9375. [Google Scholar] [CrossRef]
- Nguyen, H.L.T.; Nguyễn, B.H.; Vo-Duy, T.; Trovão, J.P.F. A comparative study of adaptive filtering strategies for hybrid energy storage systems in electric vehicles. Energies 2021, 14, 3373. [Google Scholar] [CrossRef]
- Kirk, D.E. An Introduction to Dynamic Programming. IEEE Trans. Educ. 1967, 10, 212–219. [Google Scholar] [CrossRef]
- Yu, X.; Lin, C.; Zhao, M.; Yi, J.; Su, Y.; Liu, H. Optimal energy management strategy of a novel hybrid dual-motor transmission system for electric vehicles. Appl. Energy 2022, 321, 119395. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Z.; Shi, J.; Lin, C.; Gao, Y. Optimization of a Dual-Motor Coupled Powertrain Energy Management Strategy for a Battery Electric Bus Based on Dynamic Programming Method. IEEE Access 2018, 6, 32899–32909. [Google Scholar] [CrossRef]
- Zhang, K.; Ruan, J.; Li, T.; Cui, H.; Wu, C. The effects investigation of data-driven fitting cycle and deep deterministic policy gradient algorithm on energy management strategy of dual-motor electric bus. Energy 2023, 269, 126760. [Google Scholar] [CrossRef]
- Zhu, T.; Lot, R.; Wills, R.G.; Yan, X. Sizing a battery-supercapacitor energy storage system with battery degradation consideration for high-performance electric vehicles. Energy 2020, 208, 118336. [Google Scholar] [CrossRef]
- Santucci, A.; Sorniotti, A.; Lekakou, C. Power split strategies for hybrid energy storage systems for vehicular applications. J. Power Sources 2014, 258, 395–407. [Google Scholar] [CrossRef]
- Masih-Tehrani, M.; Ha’iri-Yazdi, M.R.; Esfahanian, V.; Safaei, A. Optimum sizing and optimum energy management of a hybrid energy storage system for lithium battery life improvement. J. Power Sources 2013, 244, 2–10. [Google Scholar] [CrossRef]
- Nguyen, B.H.; Vo-Duy, T.; Ta, M.C.; Trovão, J.P.F. Optimal Energy Management of Hybrid Storage Systems Using an Alternative Approach of Pontryagin’s Minimum Principle. IEEE Trans. Transp. Electrif. 2021, 7, 2224–2237. [Google Scholar] [CrossRef]
- Yang, X.-S. Chapter 6—Genetic Algorithms. In Nature-Inspired Optimization Algorithms, 2nd ed.; Yang, X.-S., Ed.; Academic Press: Cambridge, MA, USA, 2021; pp. 91–100. [Google Scholar]
- Hou, J.; Song, Z. A hierarchical energy management strategy for hybrid energy storage via vehicle-to-cloud connectivity. Appl. Energy 2020, 257, 113900. [Google Scholar] [CrossRef]
- Nguyen, N.D.; Yoon, C.; Lee, Y.I. A standalone energy management system of battery/supercapacitor hybrid energy storage system for electric vehicles using model predictive control. IEEE Trans. Ind. Electron. 2022, 70, 5104–5114. [Google Scholar] [CrossRef]
- Koziel, S. Computational Optimization, Methods and Algorithms; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Wang, X.; Wang, S.; Liang, X.; Zhao, D.; Huang, J.; Xu, X.; Dai, B.; Miao, Q. Deep Reinforcement Learning: A Survey. IEEE Trans. Neural Networks Learn. Syst. 2022, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, C.; Han, G.; Wang, Q. Optimal Control Strategy Design Based on Dynamic Programming for a Dual-Motor Coupling-Propulsion System. Sci. World J. 2014, 2014, 958239. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Liu, F.; Tang, A.; Liu, R. A dynamic programming-optimized two-layer adaptive energy management strategy for electric vehicles considering driving pattern recognition. J. Energy Storage 2023, 70, 107924. [Google Scholar] [CrossRef]
- Shi, J.; Xu, B.; Shen, Y.; Wu, J. Energy management strategy for battery/supercapacitor hybrid electric city bus based on driving pattern recognition. Energy 2022, 243, 122752. [Google Scholar] [CrossRef]
- Song, Z.; Li, J.; Hou, J.; Hofmann, H.; Ouyang, M.; Du, J. The battery-supercapacitor hybrid energy storage system in electric vehicle applications: A case study. Energy 2018, 154, 433–441. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Han, X.; Ouyang, M. Optimization for a hybrid energy storage system in electric vehicles using dynamic programing approach. Appl. Energy 2015, 139, 151–162. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Han, X.; Zhang, X.; Ouyang, M. A comparison study of different semi-active hybrid energy storage system topologies for electric vehicles. J. Power Sources 2015, 274, 400–411. [Google Scholar] [CrossRef]
- Chih-Hsien, Y.; Chyuan-Yow, T.; Chih-Ming, C. Study on power train of two axles four wheel drive electric vehicle. Energy Procedia 2012, 14, 1528–1535. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, J.; Gao, G.; Shi, X. Research on Optimized Torque-Distribution Control Method for Front/Rear Axle Electric Wheel Loader. Math. Probl. Eng. 2017, 2017, 7076583. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, D. Powertrain matching and optimization of dual-motor hybrid driving system for electric vehicle based on quantum genetic intelligent algorithm. Discrete Dyn. Nat. Soc. 2014, 2014, 956521. [Google Scholar] [CrossRef]
- Zheng, Q.; Tian, S.; Zhang, Q.; Chen, C.H. Optimal Torque Split Strategy of Dual-Motor Electric Vehicle Using Adaptive Nonlinear Particle Swarm Optimization. Math. Probl. Eng. 2020, 2020, 1204260. [Google Scholar] [CrossRef]
- Trovão JP, F.; Santos, V.D.; Pereirinha, P.G.; Jorge, H.M.; Antunes, C.H. A simulated annealing approach for optimal power source management in a small EV. IEEE Trans. Sustain. Energy 2013, 4, 867–876. [Google Scholar] [CrossRef]
- Yang, G.; Li, J.; Fu, Z.; Fang, L. Optimization of logic threshold control strategy for electric vehicles with hybrid energy storage system by pseudo-spectral method. Energy Procedia 2018, 152, 508–513. [Google Scholar] [CrossRef]
- Li, J.Q.; Fu, Z.; Jin, X. Rule Based Energy Management Strategy for a Battery/Ultra-capacitor Hybrid Energy Storage System Optimized by Pseudospectral Method. Energy Procedia 2017, 105, 2705–2711. [Google Scholar] [CrossRef]
- Ayad, M.Y.; Becherif, M.; Henni, A. Vehicle hybridization with fuel cell, supercapacitors and batteries by sliding mode control. Renew. Energy 2011, 36, 2627–2634. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coupling Forms | Smoothness | Structural Complexity | Coupling Efficiency | Control Difficulty | Cost | Application |
|---|---|---|---|---|---|---|
| Dual-motor coupled by gearset | Worst | Low | Medium | Low | Low | Torque-coupling simplicity |
| Dual-motor coupled by planetary gear | Better | Medium | Medium | Medium | Medium | Optimal torque vectoring and versatile gear ratios |
| Front-and-rear-drive configuration | Best | Medium | High | Very High | Medium | Enhanced traction, stability, and efficiency |
| Strategy Types | Method | Main Results | Reference |
|---|---|---|---|
| Empirical-based method | Dynamics performance-based |
| [36] |
| This vehicle is expected to reach a top speed of 180 km/h, an acceleration time of 10 s (0–100 km/h), and a 40% gradeability. | [11] | ||
| [69] | ||
| Optimization-based | NSGA-II |
| [13] |
| Quadratic Lagrangian nonlinear programming algorithm |
| [18] | |
| GA |
| [26] | |
| In comparison to a dual-motor with a fixed gear ratio, a dual-motor with a two-speed transmission design can reduce vehicle energy consumption by 9.13% and 11.04% in WLTC and UDDS, respectively. | [35] | ||
| NNF | When compared to TCDMPs, SPGDMPs can cut energy use by at least 5.02% and total motor power by 14.56–20.48% while maintaining the same acceleration performance. | [27] | |
| PSO |
| [23] | |
| DP | Compared to a fixed-ratio gearbox, the results demonstrate that the proposed two-speed AMT has a significantly better performance in terms of acceleration ability, top speed, and energy efficiency. | [70] |
| Strategy Type | Method | Advantages | Disadvantages | Application in EMS |
|---|---|---|---|---|
| Rule-based | Deterministic | Simple control Low computational complex High Reliability Robustness | Design requires expert knowledge Not guarantee optimum results Parameter calibration Poor adaptability to complex and changing environments. | Online application: [10,11,13,21,26,28,30,31,32,37,49,51,52,55,58,61,64,65,66,72,73,74,75,76,77,78,79,80,81,82] |
| FLC | High Reliability Robustness Without mathematical model | Online application: [3,47,63,67,78] | ||
| Offline global optimization | DP | Global optimal solution Optimized control benchmark Suitable for nonlinear optimization problem | Heavy computational burden Not suitable for online application | Offline global optimization: [16,24,27,84,85,87,88,89] Control benchmark: [25,86,97] Extract control strategy: [17,48,54,84,96,98,99,100,101] |
| PMP | Offline global optimization: [19,56,90] | |||
| GA | Global optimization solution Adaptability Suitable for in complex and multi-objective optimization | Slow convergence Coding is complex Parameter tuning is important Not suitable for online application | Offline global optimization: [14,22,51] | |
| Online optimization | MPC | Handle complex dynamics and constraints Good robustness Suitable for online application | Heavy computational burden Require accurate model | Online application: [29,45,58,62,78,92,93] |
| Learning-based | RL | Robustness Excellent control performance Adaptability | Require large amount of training data Heavy computational burden | Online application: [24,33,36,46,49,50,86] |
| NN | Adaptability Strong learning ability Low computational complex | Data-hungry Time-consuming training | Online application: [17,53,54,57] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, C.T.P.; Nguyễn, B.-H.; Ta, M.C.; Trovão, J.P.F. Dual-Motor Dual-Source High Performance EV: A Comprehensive Review. Energies 2023, 16, 7048. https://doi.org/10.3390/en16207048
Nguyen CTP, Nguyễn B-H, Ta MC, Trovão JPF. Dual-Motor Dual-Source High Performance EV: A Comprehensive Review. Energies. 2023; 16(20):7048. https://doi.org/10.3390/en16207048
Chicago/Turabian StyleNguyen, Chi T. P., Bảo-Huy Nguyễn, Minh C. Ta, and João Pedro F. Trovão. 2023. "Dual-Motor Dual-Source High Performance EV: A Comprehensive Review" Energies 16, no. 20: 7048. https://doi.org/10.3390/en16207048
APA StyleNguyen, C. T. P., Nguyễn, B.-H., Ta, M. C., & Trovão, J. P. F. (2023). Dual-Motor Dual-Source High Performance EV: A Comprehensive Review. Energies, 16(20), 7048. https://doi.org/10.3390/en16207048